ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству передачи информации транспортного средства.
ОПИСАНИЕ СВЯЗАННОГО УРОВНЯ ТЕХНИКИ
Публикация Патентной Заявки Японии № 2010-176591 (JP-A-2010-176591) описывает устройство отображения транспортного средства, которое побуждает переднее ветровое стекло к отражению света от светодиодов (LED) для передачи информации водителю. Публикация Патентной Заявки Японии № 2000-172994 (JP-A-2000-172994) описывает устройство предупреждения о препятствиях транспортного средства, которое при обнаружении препятствия с правой стороны или с левой стороны транспортного средства, по отдельности, меняет размеры или яркости правого и левого предупреждающих устройств отображения. Патент Японии № 3626229 описывает систему поддержки управления транспортным средством, которая проецирует свет от источников света, установленных в транспортном средстве, таким образом, что свет отражается в позиции на поверхности переднего ветрового стекла, которая соответствует обнаруженной позиции опасности за пределами транспортного средства, чтобы проинформировать водителя об опасности.
Тем не менее, методики, описанные в документах JP-A-2010-176591, JP-A-2000-172994 и Патенте Японии № 3626229, по-прежнему имеют возможности в отношении улучшения способа передачи информации.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение предоставляет устройство передачи информации транспортного средства, которое осуществляет передачу информации более приемлемую для водителя.
Первый аспект изобретения относится к устройству передачи информации транспортного средства, которое указывает распознавание некоторого объекта. Устройство передачи информации транспортного средства указывает распознавание позиции, отличной от позиции некоторого объекта. Следует отметить, что в вышеприведенном аспекте, позиция некоторого объекта и позиция, отличная от позиции некоторого объекта, могут находиться на расстоянии друг от друга. В дополнение, способ указания распознавания некоторого объекта может отличаться от способа указания распознавания позиции, отличной от позиции некоторого объекта. В дополнение, в случае, если позицией некоторого объекта является левая сторона, если смотреть со стороны водителя, то позицией, отличной от позиции некоторого объекта, является правая сторона, если смотреть со стороны водителя; а в случае, если позицией некоторого объекта является правая сторона, если смотреть со стороны водителя, то позицией, отличной от позиции некоторого объекта, является левая сторона, если смотреть со стороны водителя. В дополнение, устройство передачи информации транспортного средства может указывать распознавание позиции, отличной от позиции некоторого объекта, во время указания распознавания некоторого объекта.
Второй аспект изобретения относится к устройству передачи информации транспортного средства, которое включает в себя: первую часть отображения, которая указывает проверку правой стороны, если смотреть со стороны водителя; и вторую часть отображения, которая указывает проверку левой стороны, если смотреть со стороны водителя. При указании контроля некоторого объекта с правой стороны или с левой стороны первая часть отображения и вторая часть отображения соответственно указывают проверку с правой стороны и проверку с левой стороны. Третий аспект изобретения относится к устройству передачи информации транспортного средства, которое включает в себя устройство отображения, которое отображает виртуальное изображение в каждой из множества позиций на переднем ветровом стекле или заднем ветровом стекле. Если устройство отображения отображает виртуальное изображение в некоторой позиции с тем, чтобы побудить водителя к распознаванию некоторого объекта, устройство отображения отображает виртуальное изображение также в позиции, отличной от некоторой позиции.
В соответствии с вышеприведенными аспектами изобретения, указывается не только распознавание некоторого объекта, но также распознавание позиции, отличной от позиции некоторого объекта, так что существует возможность осуществления лучшей передачи информации для водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки, преимущества и техническое и промышленное значение примерных вариантов осуществления изобретения будут описаны ниже со ссылкой на сопроводительные чертежи, на которых подобные цифровые обозначения обозначают подобные элементы, и на которых:
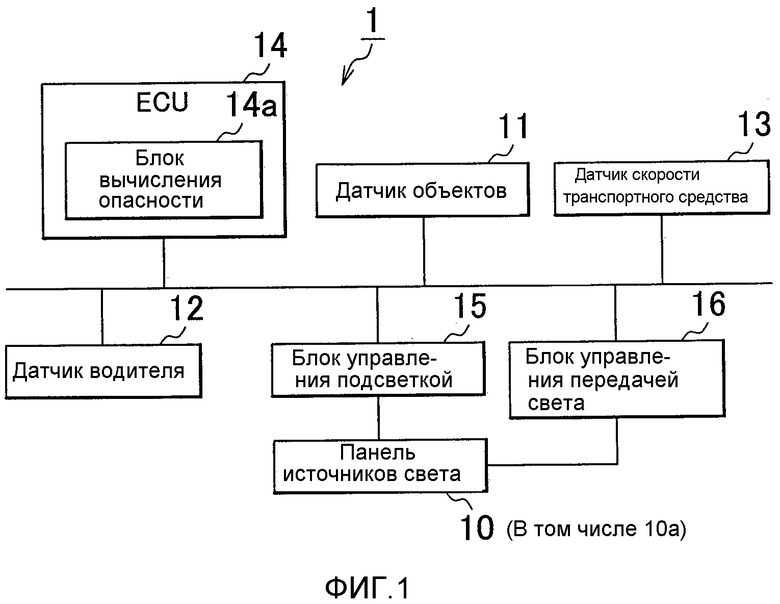
Фиг. 1 является блок-схемой, которая показывает пример конфигурации системы передачи информации транспортного средства в соответствии с вариантом осуществления;
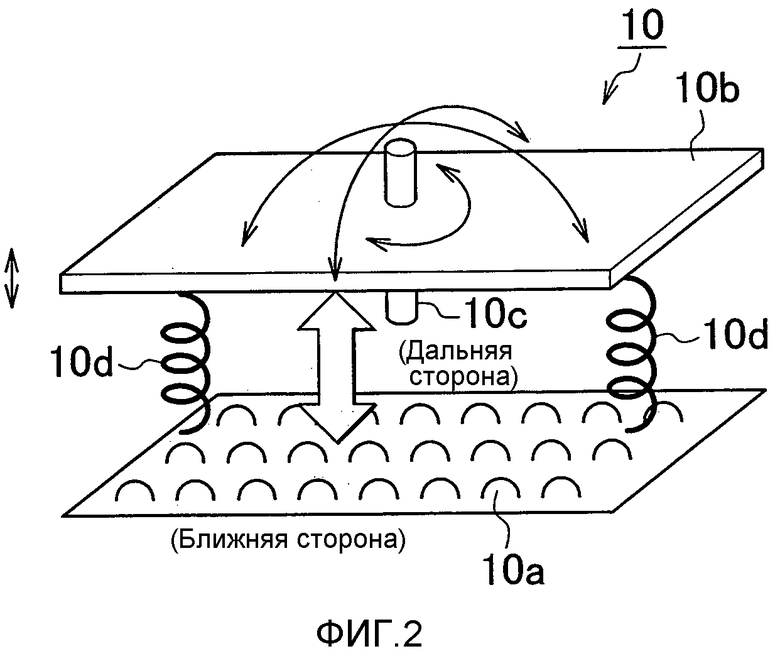
Фиг. 2 является видом, который показывает пример конфигурации панели источников света;
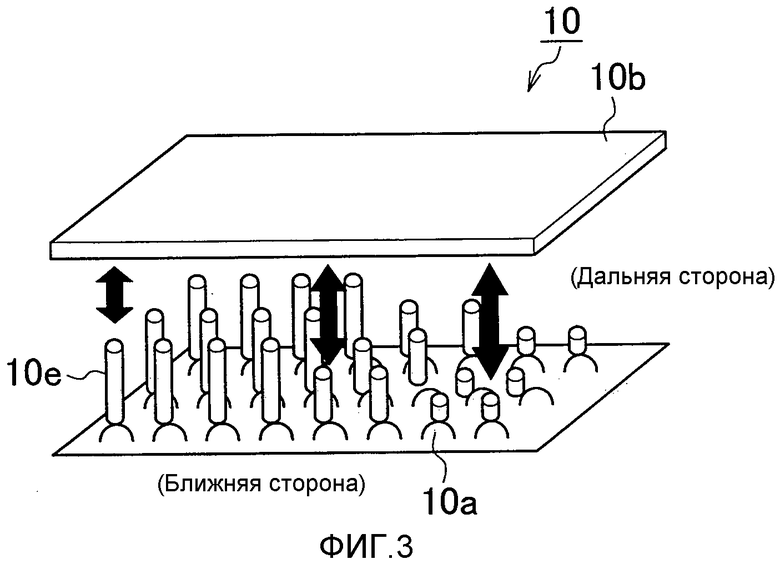
Фиг. 3 является видом, который показывает пример конфигурации панели источников света;
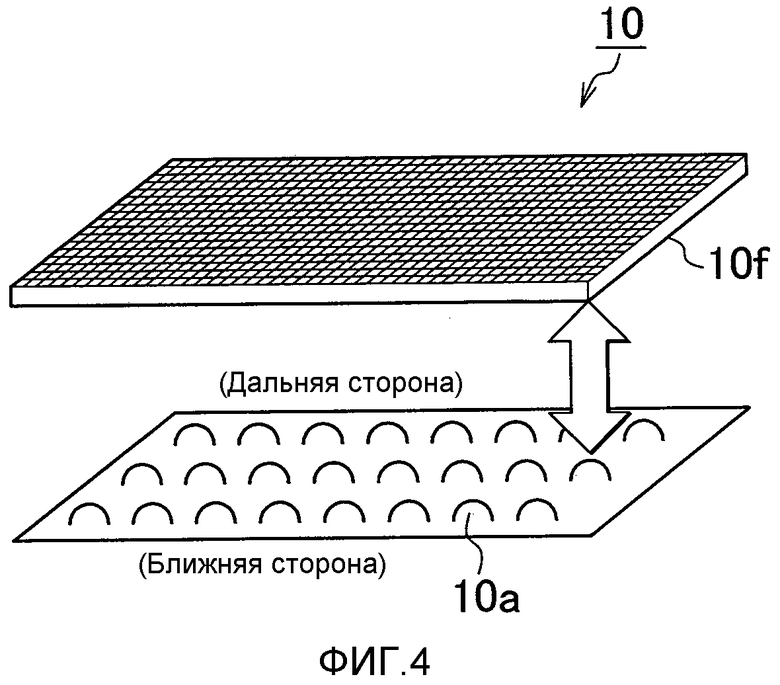
Фиг. 4 является видом, который показывает пример конфигурации панели источников света;
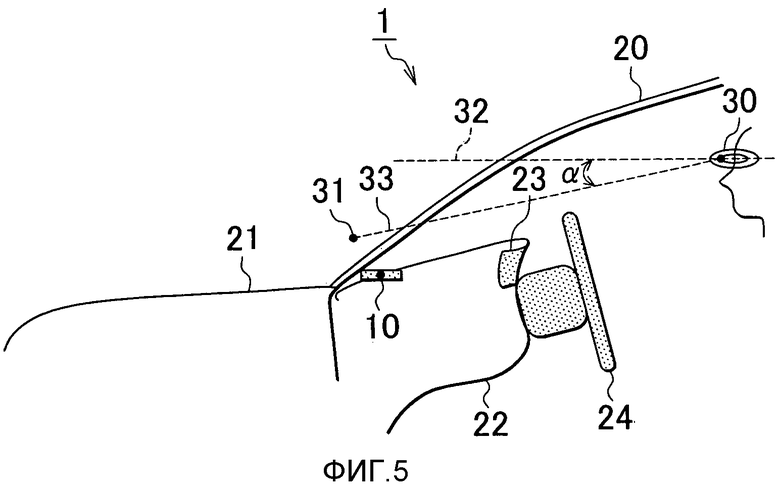
Фиг. 5 является видом, который показывает пример позиции, в которой смонтирована панель источников света;
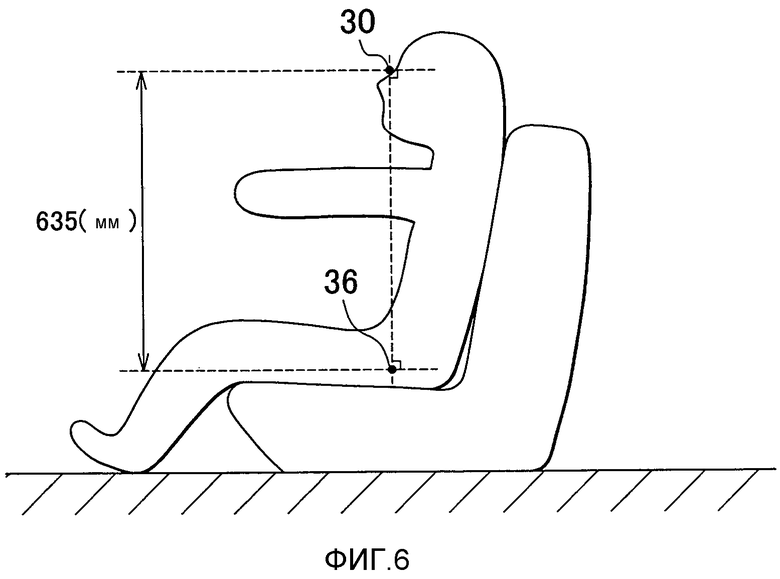
Фиг. 6 является видом, который показывает пример определения точки глаз;
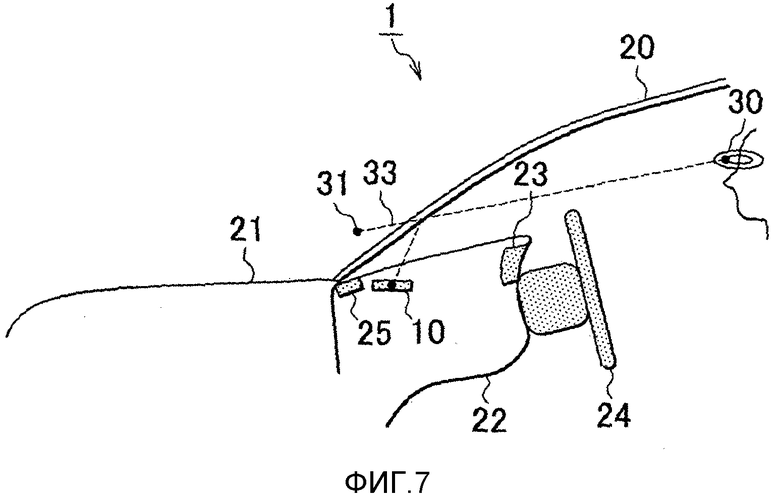
Фиг. 7 является видом, который показывает пример позиции, в которой смонтирована панель источников света;
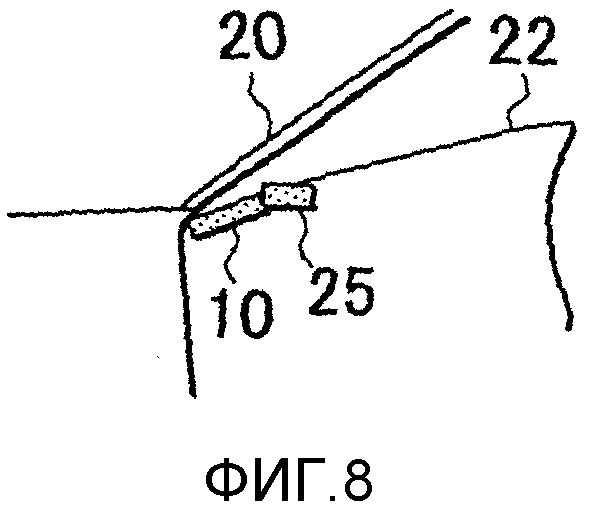
Фиг. 8 является видом, который показывает пример позиции, в которой смонтирована панель источников света;
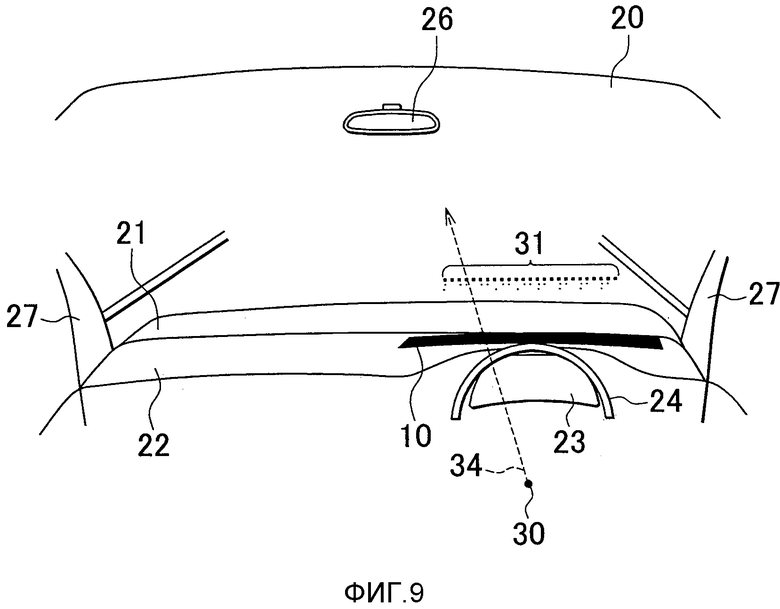
Фиг. 9 является видом, который показывает пример позиции, в которой смонтирована панель источников света;
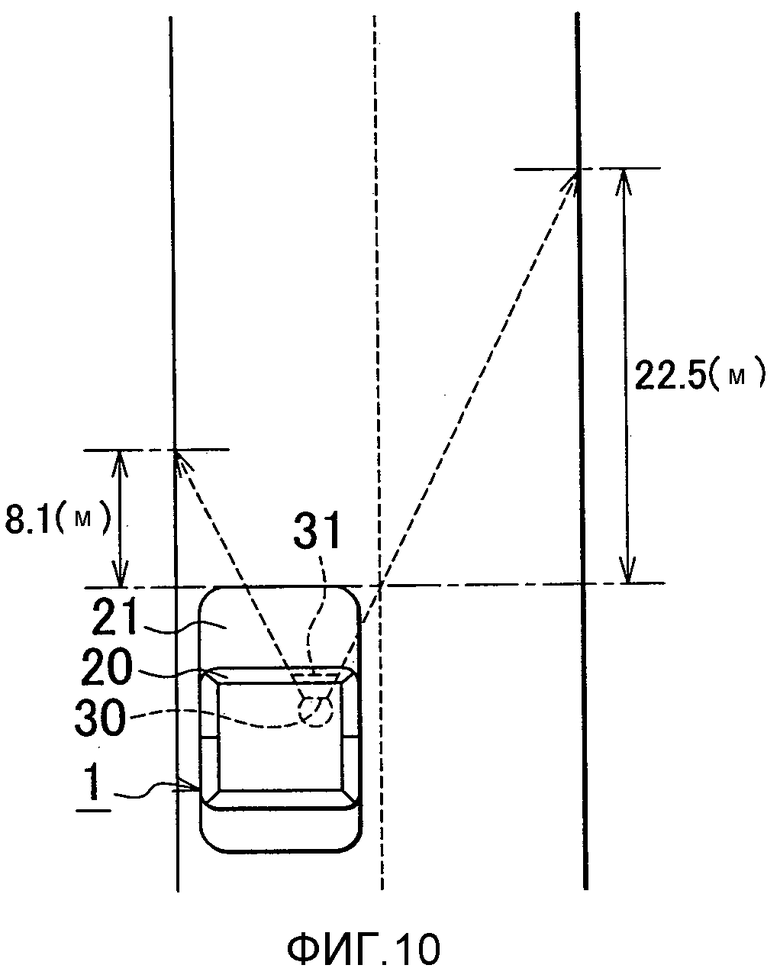
Фиг. 10 является видом, который показывает пример диапазона, показываемого виртуальным изображением, если смотреть на транспортное средство сверху;
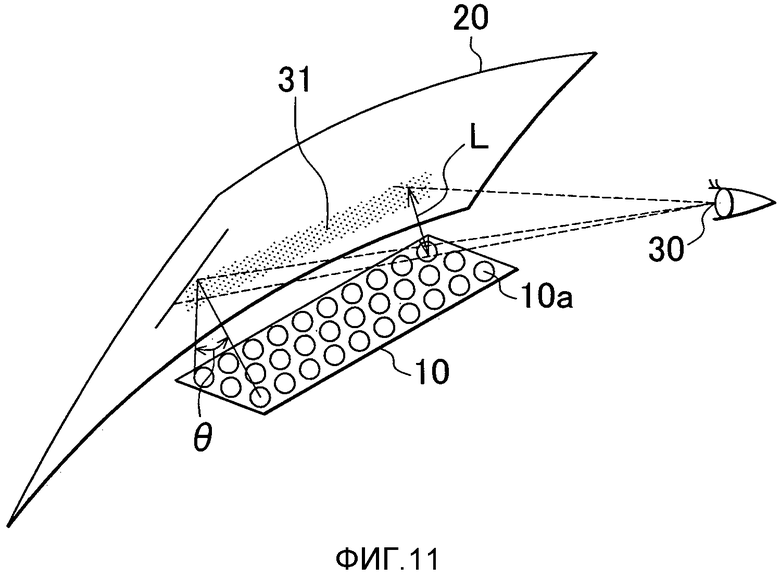
Фиг. 11 является видом, который показывает пример способа регулировки цвета и яркости света от каждого из источников света;
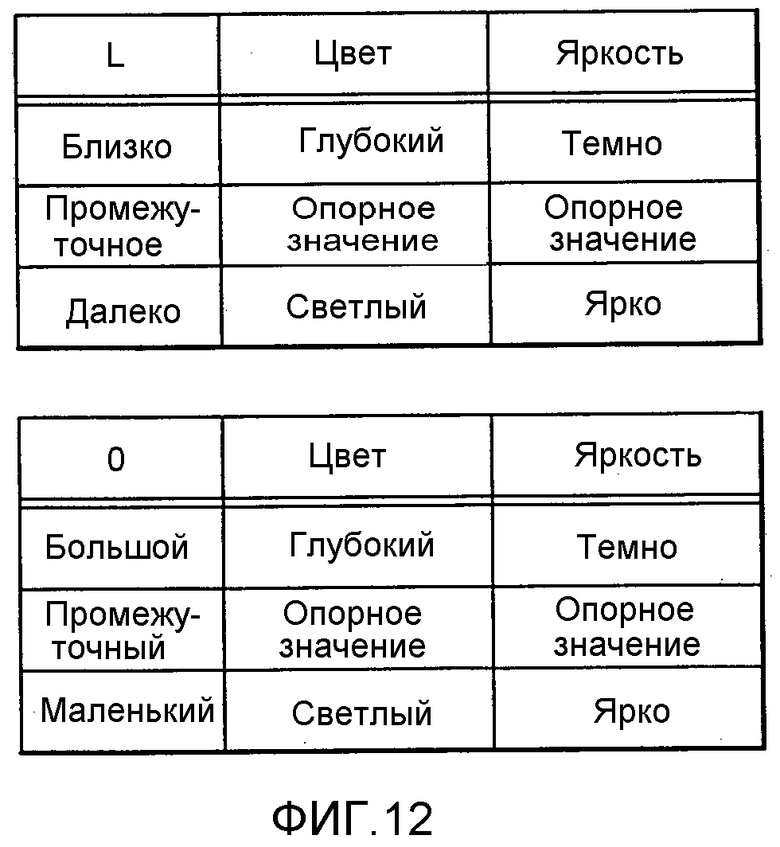
Фиг. 12 является видом, который показывает пример таблицы, которая определяет взаимосвязь между расстоянием и цветом/яркостью, и пример таблицы, которая определяет взаимосвязь между углом и цветом/яркостью;
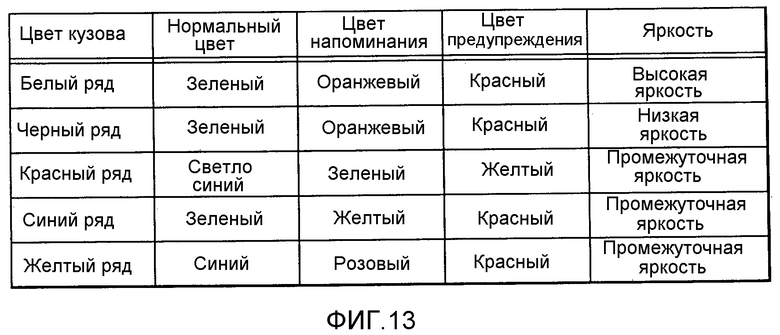
Фиг. 13 является видом, который показывает пример таблицы, которая определяет взаимосвязь между цветом кузова и нормальным цветом, цветом напоминания, цветом предупреждения и яркостью;
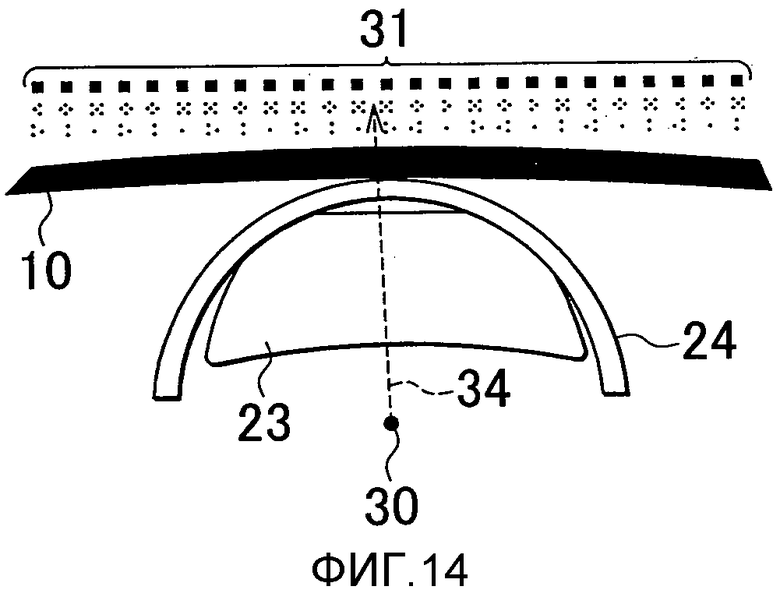
Фиг. 14 является видом, который показывает пример способа показа виртуального изображения;
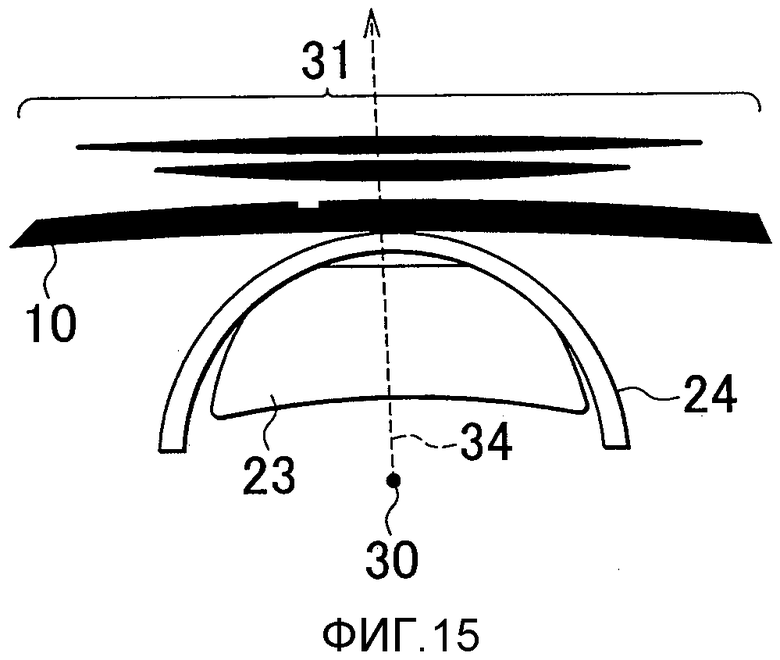
Фиг. 15 является видом, который показывает пример способа показа виртуального изображения;
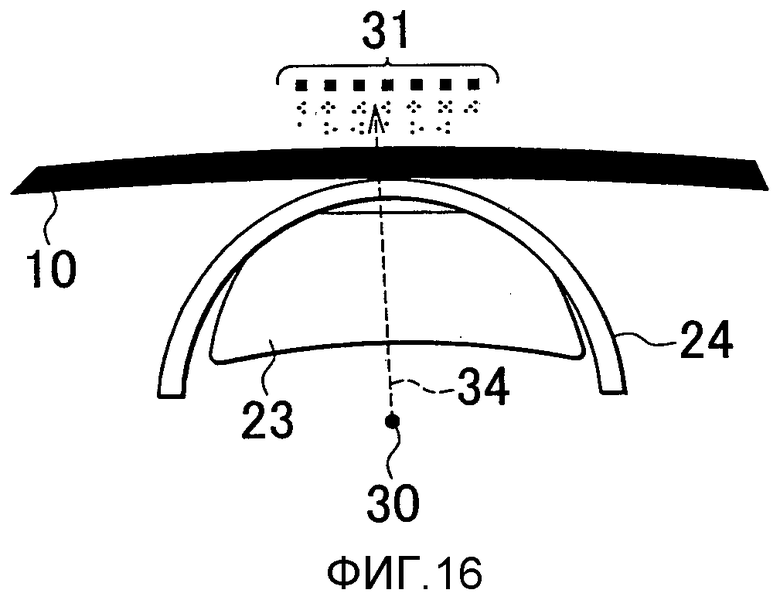
Фиг. 16 является видом, который показывает пример способа показа виртуального изображения;
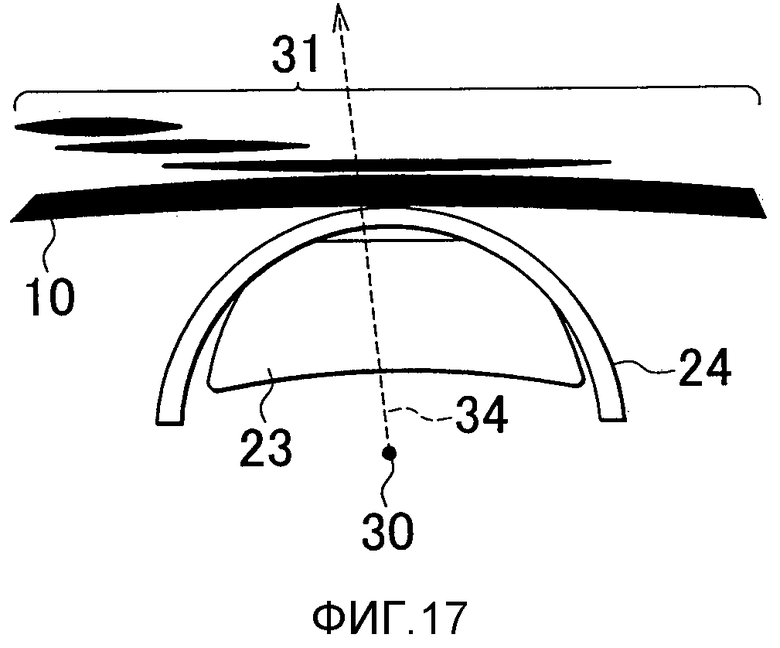
Фиг. 17 является видом, который показывает пример способа показа виртуального изображения;
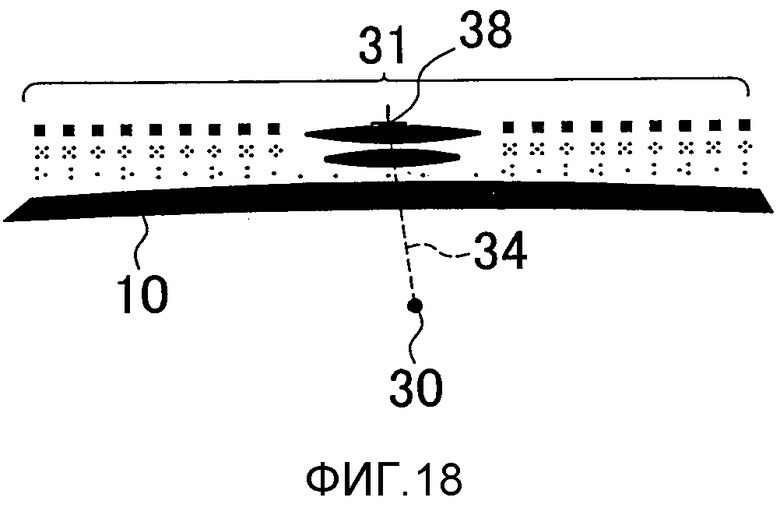
Фиг. 18 является видом, который показывает пример способа показа виртуального изображения;
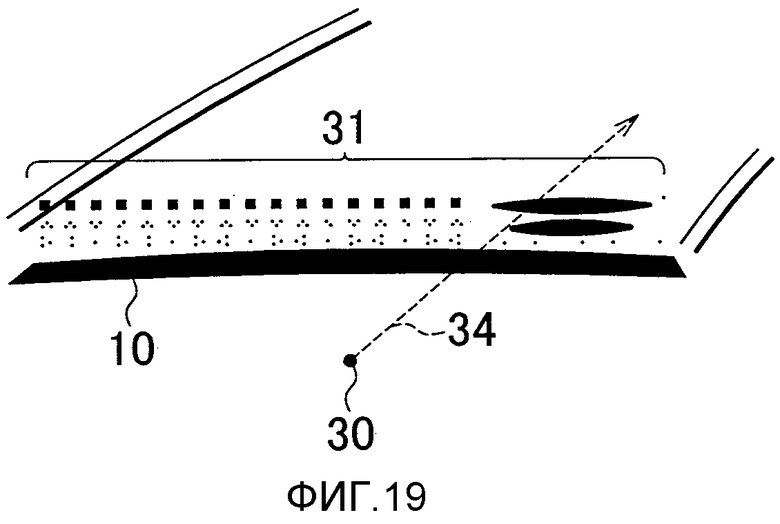
Фиг. 19 является видом, который показывает пример способа показа виртуального изображения;
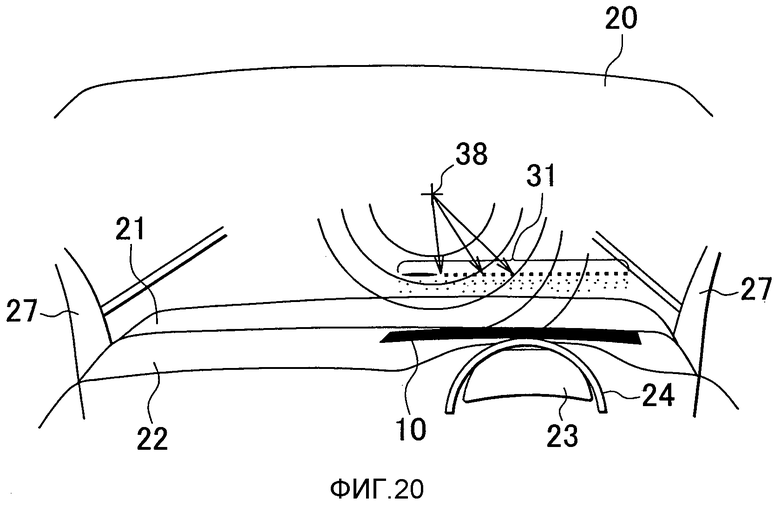
Фиг. 20 является видом, который показывает пример способа показа виртуального изображения;
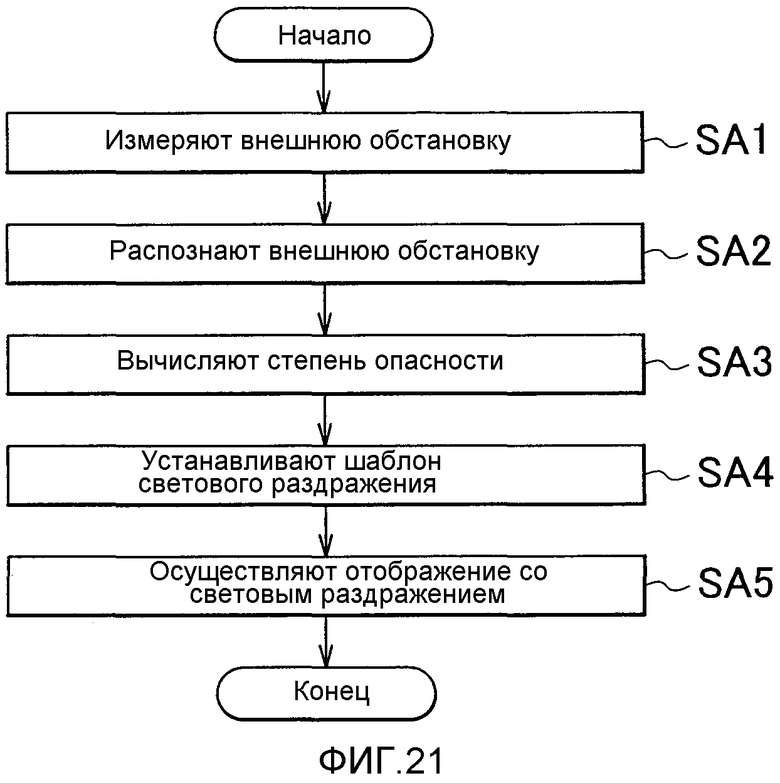
Фиг. 21 является блок-схемой, которая показывает пример операции вычисления опасности и операции управления подсветкой, которые исполняются системой передачи информации транспортного средства в соответствии с вариантом осуществления;
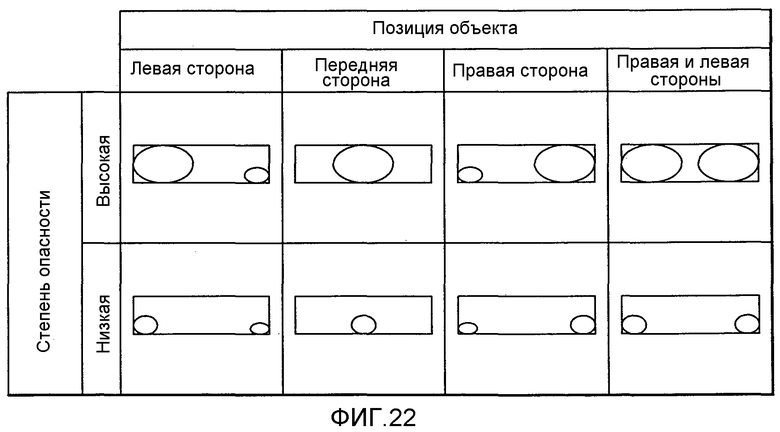
Фиг. 22 является видом, который показывает примет таблицы, которая определяет взаимосвязь между позицией и степенью опасности объекта и проецируемой позицией и проецируемой площадью света;
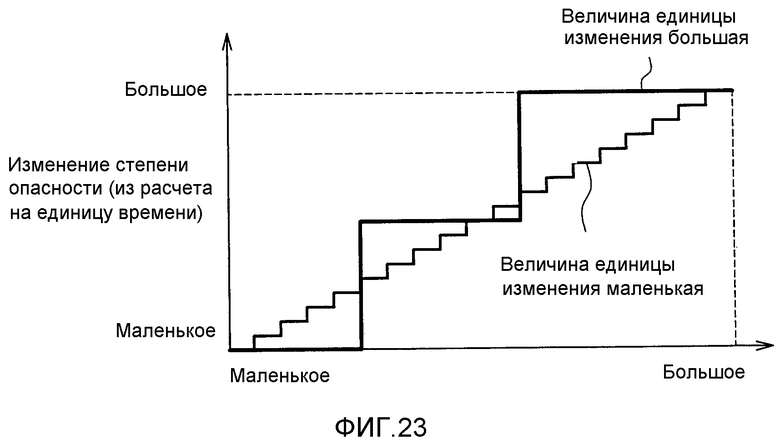
Фиг. 23 является графиком, который показывает пример взаимосвязи между степенью опасности и скоростью изменения из расчета на единицу изменения цвета или яркости света;
Фиг. 24 является видом, который показывает пример способа показа виртуального изображения;
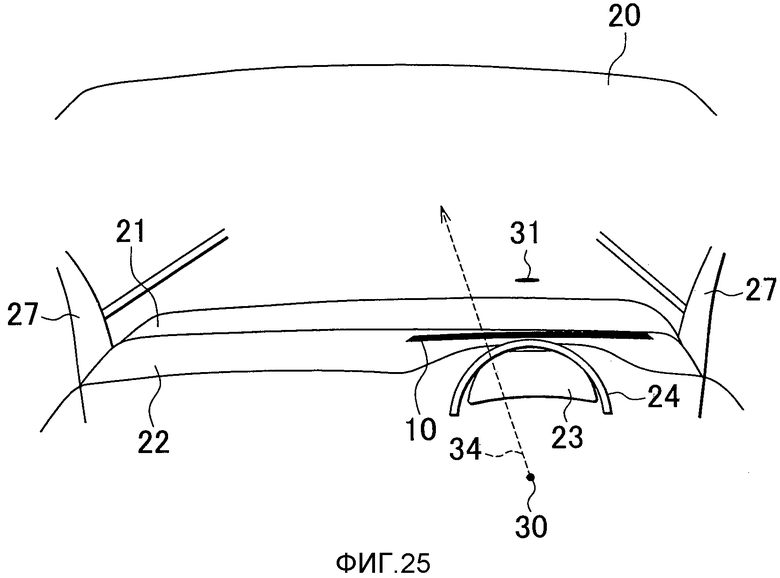
Фиг. 25 является видом, который показывает пример способа показа виртуального изображения;
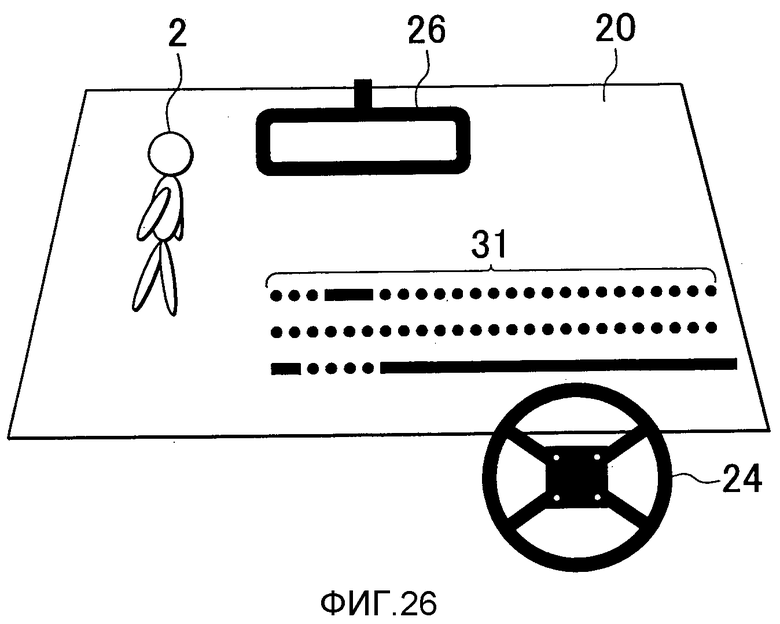
Фиг. 26 является видом, который показывает пример способа показа виртуального изображения;
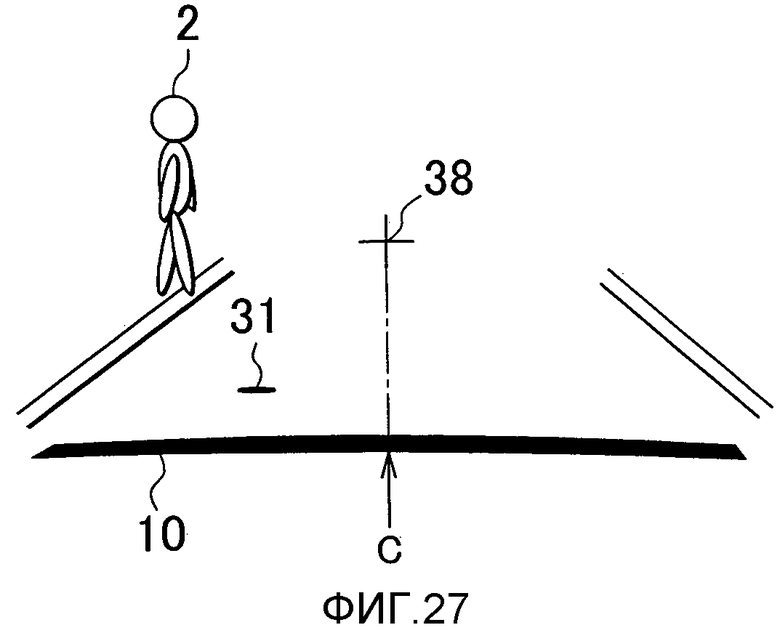
Фиг. 27 является видом, который показывает пример способа показа виртуального изображения;
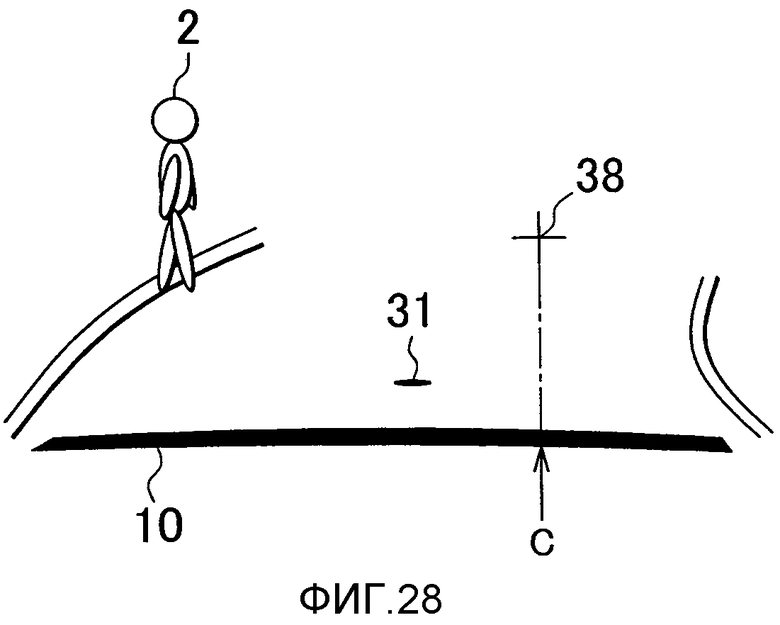
Фиг. 28 является видом, который показывает пример способа показа виртуального изображения;
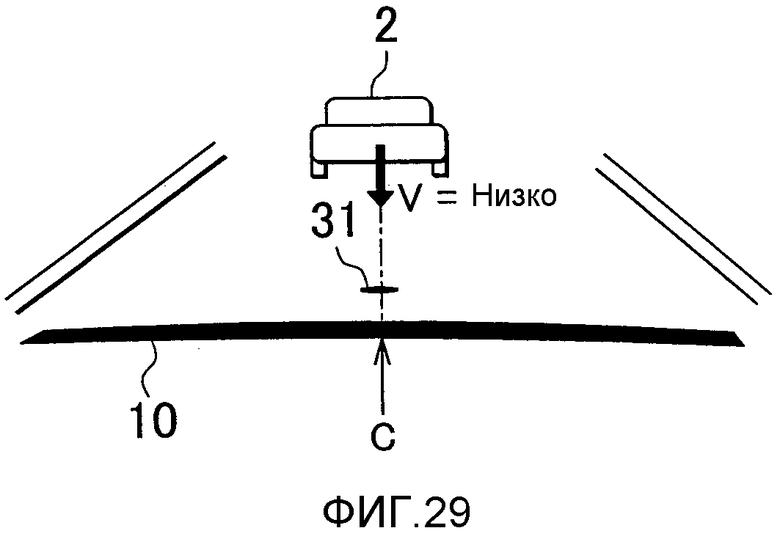
Фиг. 29 является видом, который показывает пример способа показа виртуального изображения; и
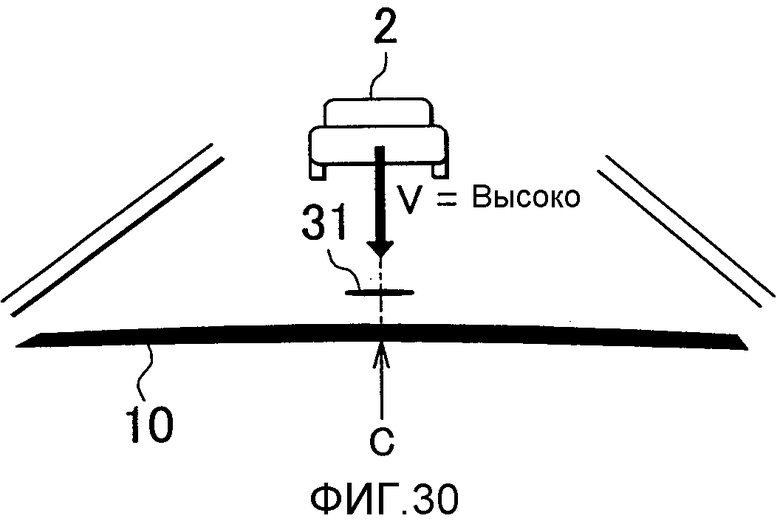
Фиг. 30 является видом, который показывает пример способа показа виртуального изображения.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Здесь и далее со ссылкой на сопроводительные чертежи будет подробно описана система передачи информации транспортного средства, которая включает в себя устройство передачи информации транспортного средства в соответствии с вариантом осуществления изобретения. Следует отметить, что аспект изобретения не ограничен этим вариантом осуществления.
Система передачи информации транспортного средства в соответствии с настоящим изобретением проецирует свет от множества источников света (светодиодов (LED)), смонтированных (скомпонованных) в матрице (множества строк или множества столбцов) на приборной панели, на переднее ветровое стекло, чтобы уведомить (напомнить или предупредить) водителя о позиции, в которой находится объект опасности (такой как пешеход, велосипед, автомобиль и мертвая зона) вокруг транспортного средства-носителя (упомянутой системы), или о направлении, в котором находится объект опасности, при помощи виртуального изображения, полученного посредством проецируемого света. Здесь и далее, пример конфигурации данной системы, пример функционирования, выполняемого данной системой, и подобное, будут подробно описаны со ссылкой на сопроводительные чертежи.
Следует отметить, что в нижеследующем описании, позиция, в которой смонтированы источники света, располагается на приборной панели; вместо этого, позиция, например, может располагаться на панели измерительных приборов или подобном. В дополнение, источниками света являются одноцветные LED; вместо этого, источниками цвета могут быть, например, полноцветные LED, лампы или подобное. В дополнение, частью, на которую проецируется свет (часть, на которой отображается виртуальное изображение) является переднее ветровое стекло; вместо этого, частью может быть, например, передняя стойка кузова, зеркало бокового вида, панель измерительных приборов, приборная панель или подобное. В дополнение, подробности, о которых уведомляют водителя, содержат объект опасности (опасность); вместо этого, подробности могут, например, содержать руководство по маршруту, поступление сообщения электронной почты, состояние водителя (например, бодрствование и сон), режим транспортного средства-носителя (например, режим эко-вождения) или подобное. В дополнение, объект опасности обнаруживается датчиком объектов; вместо этого, объект опасности может обнаруживаться, например, посредством распознавания изображений с использованием камеры; связи, такой как связь между транспортными средствами и связь между дорогой и транспортным средством; навигационной информации (такой как карта и база данных об опасных местах или подобном); или подобного. В дополнение, позиция и направление, в отношении которых предоставляется уведомление, являются левыми и правыми, если смотреть со стороны водителя; вместо этого, позиция и направление могут быть, например, передним и задним, или подобным. В дополнение, формой отображаемого виртуального изображения является линейная форма (последовательность точек); вместо этого, форма может представлять собой, например, графику, такую как пиктограмма, знак, символ или подобное. В дополнение, помимо уведомления о позиции, в которой находится объект опасности, или о направлении, в котором находится объект опасности, может выполняться уведомление о подробностях (таких как информация о том, что объектом опасности является пешеход, велосипед, автомобиль или мертвая зона) или подобном, объекта опасности. В дополнение, режим уведомления (форма уведомления и способ уведомления) является световым; вместо этого, режимом уведомления может быть, например, любой распознаваемый человеком режим, такой как звуковой (голосовой) и противодействующая сила операции.
1. КОНФИГУРАЦИЯ
Фиг. 1 является блок-схемой, которая показывает пример конфигурации системы передачи информации транспортного средства в соответствии с настоящим вариантом осуществления. Транспортное средство 1 включает в себя панель 10 источников света, датчик 11 объектов, датчик 12 водителя, датчик 13 скорости транспортного средства, электронный блок 14 (ECU) управления, блок 15 управления подсветкой и блок 16 управления передачей света. Панель 10 источников света имеет множество источников 10a света и механизм, который регулирует степень передачи света и яркость света от источников 10a света. ECU 14 включает в себя блок 14a вычисления опасности. Панель 10 источников света может рассматриваться в качестве устройства отображения в соответствии с аспектом изобретения.
Датчик 11 объектов обнаруживает внешнюю обстановку (информацию об объекте, таком как пешеход, велосипед, автомобиль и мертвая зона (такая как зона за зданием, невидимая сторона поворота и невидимая сторона автомобиля), форме дороги, такую как прямая дорога, левый поворот и правый поворот) вокруг транспортного средства 1. Датчик 12 водителя обнаруживает точку взгляда и направление взгляда водителя. Датчик 13 скорости транспортного средства обнаруживает скорость транспортного средства 1. Блок 14a вычисления опасности вычисляет (оценивает) степень опасности вокруг транспортного средства 1 на основании: внешней обстановки вокруг транспортного средства 1, обнаруживаемой датчиком 11 объектов, точки взгляда и направления взгляда, которые обнаруживаются датчиком 12 водителя, скорости транспортного средства, которая обнаруживается датчиком 13 скорости транспортного средства; и подобного.
Фиг. 2 является видом, который показывает пример конфигурации панели 10 источников света. Как показано на Фиг. 2, панель 10 источников света включает в себя панель 10b рассеивателя, элемент 10c вала и пружины 10d. В панели 10 источников света множество источников 10a света скомпонованы в матрице из множества строк или множества столбцов, так что свет может излучаться в поперечном направлении (горизонтальном направлении, направлении ширины транспортного средства) и продольном направлении (направлении по высоте, вертикальном направлении). Чтобы проецировать три виртуальных изображения красной, желтой и зеленой горизонтальных линий на переднем ветровом стекле сверху, панель 10 источников света установлена таким образом, что источники 10a света, которые излучают красный ряд света, скомпонованы на линии ближе к водителю, источники 10a света, которые излучают желтый ряд света, скомпонованы на средней линии и затем источники 10a света, которые излучают зеленый ряд света, скомпонованы на линии дальней стороны. В панели 10 источников света панель 10b рассеивателя и элемент 10c вала используются для общей или частичной регулировки степени передачи света (степени размытости света/степени рассеивания света) от источников 10a света в связи с позициями источников 10a света, а множество пружин 10d используются для сохранения расстояния между источниками 10a света и панелью 10b рассеивателя максимальным в случае выхода из строя. Множество пружин 10d выступают в роли отказобезопасного устройства. В панели 10 источников света скомпонован приводной механизм (не показан), такой как мотор. Приводной механизм электромагнитно или электрически выполняет три вращательных движения (вертикальное, горизонтальное и скручивающее движение), т.е. наклон в продольном направлении, наклон в поперечном направлении и вращение, панели 10b рассеивателя. Панель 10b рассеивателя, например, сформирована из тонколистового элемента, изготовленного из материала, такого как полипропилен или поликарбонат. Элемент 10c вала является элементом вала, который выступает в роли оси трех вращательных движений панели 10b рассеивателя. Следует отметить, что позиции пружин 10d или количество пружин 10d может быть установлено таким образом, чтобы сохранять расстояние между источниками 10a света и панелью 10b рассеивателя максимальным в случае выхода из строя. В дополнение, чтобы расширить диапазон света, выше или ниже панели 10b рассеивателя могут быть вставлена линза Френеля.
Фиг. 3 является видом, который показывает другой пример конфигурации панели 10 источников света. Как показано на Фиг. 3, панель 10 источников света включает в себя световодные элементы 10e. Панель 10b рассеивателя и световодные элементы 10e скомпонованы в панели 10 источников света. Панель 10b рассеивателя и световодные элементы 10e используются для регулировки степени передачи света от источников 10a света. Световодные элементы 10e являются, например, оптическими волокнами или подобным, и скомпонованы по отдельности в соответствии с источниками 10a света, как показано на чертеже. В панели 10 источников света скомпонован приводной механизм (не показан). Приводной механизм регулирует расстояние между панелью 10b рассеивателя и световодными элементами 10e. При показанной на Фиг. 3 конфигурации, степень передачи света от каждого из источников 10a света может регулироваться независимо друг от друга.
Фиг. 4 является видом, который показывает другой пример конфигурации панели 10 источников света. Как показано на Фиг. 4, панель 10 источников света включает в себя жидкокристаллическую панель 10f. Жидкокристаллическая панель 10f скомпонована в панели 10 источников света в состоянии, при котором расстояние от источников 10a света фиксировано. Жидкокристаллическая панель 10f используется для регулировки степени передачи света от источников 10a света. При показанной на Фиг. 4 конфигурации, светосила жидкокристаллической панели 10f уменьшается от центра к периферии с тем, чтобы можно было размыть свет.
Фиг. 5 является видом, который показывает пример позиции, в которой смонтирована панель 10 источников света в транспортном средстве 1. Как показано на Фиг. 5, цифровое обозначение 20 обозначает переднее ветровое стекло, которое обладает структурой уменьшения эффекта паразитного изображения, такой как у закаленного стекла, цифровое обозначение 21 обозначает капот, цифровое обозначение 22 обозначает инструментальную панель, цифровое обозначение 23 обозначает панель измерительных приборов, цифровое обозначение 24 обозначает рулевое колесо, цифровое обозначение 30 обозначает точку глаз водителя, цифровое обозначение 31 обозначает виртуальное изображение, формируемое светом от панели 10 источников света, цифровое обозначение 32, обозначает горизонтальную линию, которая проходит через точку 30 глаз, и цифровое обозначение 33 обозначает оптический путь света от панели 10 источников света. Панель 10 источников света установлена на приборной панели 22, и, в частности, установлена в такой позиции, что виртуальное изображение 31 может быть распознано водителем в самой низкой области (например, угол α наклона от горизонтальной линии 32, который проходит через точку 30 глаз, меньше либо равен пяти градусам) периферийного поля зрения водителя. Например, панель 10 источников света установлена в позиции, которая находится ближе к переднему ветровому стеклу 20, чем панель 23 измерительных приборов (другими словами, на дальней стороне приборной панели 22 от точки 30 глаз). Здесь, как показано на Фиг. 6, точка 30 глаз задана на высоте 635 (мм) выше по вертикали от опорной точки 36 сидения, которая является точкой тазобедренного сустава манекена человека, когда манекен человека сидит на сиденье в соответствии с ISO6549-1980 (смотри «Notice that regulates the particulars of safety standard for road trucking vehicles [2005.11.09], приложение 81, (Technical Standard Order for Front and Left-Side Under Mirror), которое описано по адресу домашней страницы «http://www.mlit.go.jp/jidosha/kijyun/saimokubetten/saibet_081_00.pdf»).
Фиг. 7 и 8 являются видами, которые показывают другие примеры позиций, в которых смонтирована панель 10 источников света на транспортном средстве 1. На Фиг. 7 и 8, цифровое обозначение 25 обозначает часть выходного отверстия стеклообогревателя. Например, панель 10 источников света установлена в позиции на ближней стороне (см. Фиг. 7) или на дальней стороне (см. Фиг. 8) части 25 выходного отверстия стеклообогревателя, если смотреть с точки 30 глаз. Например, панель 10 источников света установлена под поверхностью приборной панели 22 (другими словами, внутри приборной панели 22). Например, панель 10 источников света встроена в приборную панель 22.
Фиг. 9 является видом, который показывает пример позиции, в которой смонтирована панель 10 источников света в транспортном средстве 1. На Фиг. 9, цифровое обозначение 26 обозначает зеркало заднего вида, цифровое обозначение 27 обозначает передние стойки кузова, а цифровое обозначение 34 обозначает направление взгляда водителя. Например, панель 10 источников света установлена в позиции, которая, по существу, располагается перед водителем на приборной панели 22. Панель 10 источников света установлена на приборной панели 22 таким образом, что задним фоном виртуального изображения 31 является, например, передний обзор (такой как дорога или впереди идущее транспортное средство), если смотреть с точки 30 глаз.
Фиг. 10 является видом, который показывает пример диапазона, показываемого виртуальным изображением 31, если смотреть из транспортного средства 1. Когда транспортное средство 1, в котором панель 10 источников света смонтирована на приборной панели 22, как описано выше, например, находится на дороге с шириной тротуара в 1 (м) и шириной полосы движения в 3,2 (м), то диапазон, показываемый виртуальным изображением 31 (диапазон для объекта опасности), если смотреть с точки 30 глаз, является проиллюстрированным диапазоном от точки 8,1 (м) перед транспортным средством 1 с левой стороны до точки 22,5 (м) перед транспортным средством 1 с правой стороны.
Вновь обращаясь к Фиг. 1, блок 15 управления подсветкой, устанавливает нормальный, напоминающий или предупреждающий шаблон подсветки (характеристики подсветки или режим подсветки, относительно позиции, на которую проецируется свет на переднем ветровом стекле 20, площади, в которой проецируется свет на переднем ветровом стекле 20, цвета света, яркости света, интервала (мерцания) света, величины изменения из расчета на единицу изменения цвета или яркости света (величины единицы изменения цвета или яркости), или подобного) на основании: внешней обстановки вокруг транспортного средства 1, которая обнаруживается датчиком 11 объектов; точки взгляда или направления взгляда водителя, которые обнаруживаются датчиком 12 водителя; скорости транспортного средства 1, которая обнаруживается датчиком 13 скорости транспортного средства; степени опасности вокруг транспортного средства 1, которая вычисляется блоком 14a вычисления опасности, и подобного, и блок 15 управления подсветкой выполняет управление подсветкой (например, регулировку подаваемого напряжения или подобного) по отдельным источникам 10a света так, чтобы получить заданный шаблон подсветки.
Здесь, пример способа регулировки (калибровки) цвета и яркости света от источников 10a света будет описан со ссылкой на с Фиг. 11 по Фиг. 13. Как показано на Фиг. 11, цвет и яркость света от отдельных источников 10a света регулируются заранее на основании расстояния L и/или угла θ. Например, цвет и яркость света от отдельных источников 10a света регулируются на основании таблицы (см. Фиг. 12), которая определяет взаимосвязь между расстоянием L и цветом/яркостью, и/или таблицы (см. Фиг. 12), которая определяет взаимосвязь между углом θ и цветом/яркостью. Здесь, расстояние L является расстоянием от источника 10a света до соответствующей позиции, на которую свет от источника 10a света проецируется на переднем ветровом стекле 20. Как показано на Фиг. 12, блок 15 управления подсветкой увеличивает яркость света источника 10a света по мере роста расстояния L. Угол θ является углом, который образуется между передним ветровым стеклом 20 и отрезком прямой, который соединяет позицию, в которой скомпонован источник 10a света, и соответствующую позицию, на которую проецируется свет. Как показано на Фиг. 12, блок 15 управления подсветкой уменьшает яркость света от источника 10a света по мере роста угла θ. Переднее ветровое стекло 20 может рассматриваться в качестве «части кузова транспортного средства, на которую проецируется свет» в соответствии с изобретением. В дополнение, цвет и яркость каждого из источников 10a света во время нормальных промежутков времени, во время напоминания и во время предупреждения, например, заранее регулируются на основании цвета приборной панели, передней стойки кузова, зеркала бокового вида или подобного. Например, цвет и яркость каждого из источников 10a света во время нормальных промежутков времени, во время напоминания и во время предупреждения регулируются на основании таблицы (см. Фиг. 13), которая определяет взаимосвязь между цветом кузова и нормальным цветом, цветом напоминания, цветом предупреждения и яркостью. Эти отрегулированные статусы цвета и яркости хранятся в зоне хранения блока 15 управления подсветкой.
Следует отметить, что блок 15 управления подсветкой может регулировать яркость или цвет света на основании того, включен или выключен головной свет, или при помощи фотодатчика или подобного. Например, блок 15 управления подсветкой может уменьшить яркость света в ночные часы. В дополнение, блок 15 управления подсветкой может регулировать яркость, цвет, интервал (мерцание) и подобное, света на основании достоверности степени опасности, оцениваемой блоком 14а вычисления опасности. В дополнение, блок 15 управления подсветкой может задержать лучи света, распознанные водителем, из числа испускаемых лучей света или уменьшить яркость, цвет или подобное, распознанных лучей света на основании точки взгляда или направления взгляда водителя, которые обнаруживаются датчиком 12 водителя. В дополнение, блок 15 управления подсветкой также может уведомить о подробностях в отношении объекта опасности (например, о том, что объектом опасности является пешеход, транспортное средство или подобное) совместно с позицией, в которой находится объект опасности или направлением, в котором находится объект опасности.
Вновь обращаясь к Фиг. 1, блок 16 управления передачей света регулирует степень передачи (степень размытости/степень рассеивания) света от источников 10a света панели 10 источников света на основании: внешней обстановки вокруг транспортного средства 1, которая обнаруживается датчиком 11 объектов; точки взгляда или направления взгляда водителя, которые обнаруживаются датчиком 12 водителя; скорости транспортного средства 1, которая обнаруживается датчиком 13 скорости транспортного средства; степени опасности вокруг транспортного средства 1, которая вычисляется блоком 14 вычисления опасности; шаблона света, заданного блоком 15 управления подсветкой, и подобного.
Например, когда блок 15 управления подсветкой зажигает источники 10a света в соответствии с напоминающим шаблоном подсветки, то блок 16 управления передачей света в целом увеличивает расстояние между источниками 10a света и панелью 10b рассеивателя в панели 10 источников света, если используется панель 10 источников света, показанная на Фиг. 2, в целом увеличивает расстояние между панелью 10b рассеивателя и световодными элементами 10e в панели 10 источников света, если используется панель 10 источников света, показанная на Фиг. 3, или в целом уменьшает светосилу жидкокристаллической панели 10f в панели 10 источников света, если используется панель 10 источников света, показанная на Фиг. 4. Посредством этого, состояние виртуального изображения 31 может быть изменено с четкого состояния, показанного на Фиг. 14, до размытого состояния, показанного на Фиг. 15. Т.е., виртуальное изображение 31 может быть размыто.
В дополнение, на основании степени опасности, вычисленной блоком 14a вычисления опасности, блок 16 управления передачей света регулирует расстояние между источниками 10a света и панелью 10b рассеивателя, если используется панель 10 источников света, показанная на Фиг. 2, регулирует расстояние между панелью 10b рассеивателя и световодными элементами 10e, если используется панель 10 источников света, показанная на Фиг. 3, или регулирует светосилу жидкокристаллической панели 10f, если используется панель 10 источников света, показанная на Фиг. 4. Когда степень опасности низкая, то блок 16 управления передачей света в целом увеличивает расстояние между источниками 10a света и панелью 10b рассеивателя, в целом увеличивает расстояние между панелью 10b рассеивателя и световодными элементами 10e или в целом уменьшает светосилу жидкокристаллической панели 10f. В дополнение, когда степень опасности высокая, то блок 16 управления передачей света в целом уменьшает расстояние между источниками 10a света и панелью 10b рассеивателя, в целом уменьшает расстояние между панелью 10b рассеивателя и световодными элементами 10e или в целом увеличивает светосилу жидкокристаллической панели 10f. Посредством этого может обеспечиваться четкое виртуальное изображение 31 при высокой опасности; в то время как при низкой опасности может обеспечиваться размытое виртуальное изображение 31.
В дополнение, когда блок 15 управления подсветкой зажигает источники 10a света в соответствии с шаблоном подсветки, который отображает конкретную информацию (такую как знак или пиктограмму), то блок 16 управления передачей света в целом уменьшает расстояние между источниками 10a света и панелью 10b рассеивателя в панели 10 источников света, если используется панель 10 источников света, показанная на Фиг. 2, в целом уменьшает расстояние между панелью 10b рассеивателя и световодными элементами 10e в панели 10 источников света, если используется панель 10 источников света, показанная на Фиг. 3, или в целом увеличивает светосилу жидкокристаллической панели 10f в панели 10 источников света, если используется панель 10 источников света, показанная на Фиг. 4. Посредством этого, может быть обеспечено четкое виртуальное изображение 31, соответствующее конкретной информации.
В дополнение, на основании скорости транспортного средства 1, которая обнаруживается датчиком 13 скорости транспортного средства, блок 16 управления передачей света регулирует расстояние между источниками 10a света и панелью 10b рассеивателя, если используется панель 10 источников света, показанная на Фиг. 2, регулирует расстояние между панелью 10b рассеивателя и световодными элементами 10e, если используется панель 10 источников света, показанная на Фиг. 3, или регулирует светосилу жидкокристаллической панели 10f, если используется панель 10 источников света с Фиг. 4. Когда скорость транспортного средства ниже или равна предопределенному значению (например, когда транспортное средство остановлено или подобное), то блок 16 управления передачей света в целом уменьшает расстояние между источниками 10a света и панелью 10b рассеивателя, в целом уменьшает расстояние между панелью 10b рассеивателя и световодными элементами 10e или в целом увеличивает светосилу жидкокристаллической панели 10а. С другой стороны, когда скорость транспортного средства превышает предопределенное значение (например, когда транспортное средство 1 движется или подобное), то блок 16 управления передачей света в целом увеличивает расстояние между источниками 10a света и панелью 10b рассеивателя, в целом увеличивает расстояние между панелью 10b рассеивателя и световодными элементами 10e или в целом уменьшает светосилу жидкокристаллической панели. Посредством этого, четкое виртуальное изображение 31, показанное на Фиг. 16, может обеспечиваться, когда транспортное средство остановлено; в то время как размытое виртуальное изображение 31, показанное на Фиг. 17, может обеспечиваться, когда транспортное средство 1 движется.
В дополнение, если используется панель 10 источников света, показанная на Фиг. 2, то блок 16 управления передачей света частично увеличивает расстояние между источниками 10a света, которые проецируют свет вокруг точки взгляда 38 водителя, которая обнаружена датчиком 12 водителя, и только частью панели 10b рассеивателя, которая соответствует позициям, в которых скомпонованы эти источники 10a света. Если используется панель 10 источников света, показанная на Фиг. 3, то блок 16 управления передачей света частично увеличивает расстояние между панелью 10b рассеивателя и лишь частью световодных элементов 10e, которые скомпонованы в соответствии с источниками 10a света, которые проецируют свет вокруг точки взгляда 38 (см. Фиг. 18). Если используется панель 10 источников света, показанная на Фиг. 4, то блок 16 управления передачей света уменьшает светосилу только части жидкокристаллической панели 10f, которая соответствует позициям, в которых скомпонованы источники 10a света, которые проецируют свет вокруг точки взгляда 38. Посредством этого, как показано на Фиг. 18, лишь часть виртуального изображения 31, просматриваемого водителем (часть виртуального изображения 31 вокруг точки взгляда 38), может быть выборочно размыта или предоставлена в размытом состоянии.
В дополнение, блок 16 управления передачей света регулирует степень передачи света от источников 10a света панели 10 источников света на основании формы дороги, такой как левый поворот и правый поворот. Если используется панель 10 источников света, показанная на Фиг. 2, то блок 16 управления передачей света частично увеличивает расстояние между источниками 10a света, которые проецируют свет по отношению к направлению (например, в направлении направо для правого поворота, направлении налево для левого поворота), в котором меняется форма дороги и в котором направлен взгляд водителя, и только частью панели 10b рассеивателя, которая соответствует позициям, в которых скомпонованы эти источники 10a света. Если используется панель 10 источников света, показанная на Фиг. 3, то блок 16 управления передачей света частично увеличивает расстояние между панелью 10b рассеивателя и только частью световодных элементов 10e, которые скомпонованы в соответствии с источниками 10a света, которые проецируют свет по отношению к направлению, в котором меняется форма дороги. Если используется панель 10 источников света, показанная на Фиг. 4, то блок 16 управления передачей уменьшает светосилу только части жидкокристаллической панели 10f, которая соответствует позициям, в которых скомпонованы источники 10a света, которые проецируют свет по отношению к направлению, в котором меняется форма дороги. Посредством этого, как показано на Фиг. 19, лишь часть виртуального изображения 31 в направлении поворота, в котором направлен взгляд водителя (часть виртуального изображения 31 вокруг направления 34 взгляда) может выборочно размываться и предоставляться в размытом состоянии.
В дополнение, блок 16 управления передачей света регулирует степень передачи света от источников 10a света панели 10 источников света на основании расстояния от центрального поля зрения водителя (точки взгляда 38 водителя, которая обнаруживается датчиком 12 водителя (см. Фиг. 20)) до виртуального изображения 31. Если используется панель 10 источников света, показанная на Фиг. 2, то блок 16 управления передачей света относительно увеличивает расстояние между панелью 10b рассеивателя и источниками 10a света, имеющими относительно короткое расстояние от точки взгляда 38, относительно уменьшает расстояние между панелью 10b рассеивателя и источниками 10a света, имеющими относительно длинное расстояние от точки взгляда 38, и устанавливает расстояние между панелью 10b рассеивателя и источниками 10a света, имеющими относительно промежуточное расстояние от точки взгляда 38, на относительно промежуточном расстоянии. Если используется панель 10 источников света, показанная на Фиг. 3, то блок 16 управления передачей света относительно увеличивает расстояние между панелью 10b рассеивателя и световодными элементами 10e, которые скомпонованы в соответствии с источниками 10a света, имеющими относительно короткое расстояние от точки взгляда 38, относительно уменьшает расстояние между панелью 10b рассеивателя и световодными элементами 10e, которые скомпонованы в соответствии с источниками 10a света, имеющими относительно длинное расстояние от точки взгляда 38 и устанавливает расстояние между панелью 10b рассеивателя и световодными элементами 10e, которые скомпонованы в соответствии с источниками 10a света, имеющими относительно промежуточное расстояние от точки взгляда 38, на относительно промежуточном расстоянии. Если используется панель 10 источников света, показанная на Фиг. 4, то блок 16 управления передачей света относительно уменьшает светосилу части жидкокристаллической панели 10f, которая соответствует позициям, в которых скомпонованы источники света, имеющие относительно короткое расстояние от точки взгляда 38, относительно увеличивает светосилу части жидкокристаллической панели 10f, которая соответствует позициям, в которых скомпонованы источники света, имеющие относительно длинное расстояние от точки взгляда 38, и устанавливает светосилу части жидкокристаллической панели 10f, которая соответствует позициям, в которых скомпонованы источники 10a света, имеющие относительно промежуточное расстояние от точки взгляда 38, на относительно промежуточном значении светосилы. Посредством этого, как показано на Фиг. 20, состояние виртуального изображения 31 может постепенно меняться от размытого состояния к четкому состоянию из позиции с коротким расстоянием от точки взгляда 38 в позицию с длинным расстоянием от точки взгляда 38.
2. РАБОТА
Фиг. 21 является блок-схемой последовательности операций, которая показывает пример операции вычисления опасности и операции управления подсветкой, которые исполняются системой передачи информации транспортного средства в соответствии с настоящим вариантом осуществления.
ЭТАП SA1: ИЗМЕРЕНИЕ ВНЕШНЕЙ ОБСТАНОВКИ
Датчик 11 объектов измеряет информацию об объекте (таком как пешеход, велосипед, транспортное средство и мертвая зона) вокруг транспортного средства 1.
ЭТАП SA2: РАСПОЗНАВАНИЕ ВНЕШНЕЙ ОБСТАНОВКИ
Блок 14a вычисления опасности распознает, является ли условие вокруг транспортного средства 1 нормальным условием, при котором отсутствует объект и напоминание или предупреждение не требуется, или условием, при котором присутствует объект и требуется напоминание или предупреждение, на основании информации об объекте, которая измеряется на этапе SA1. Например, блок 14a вычисления опасности распознает, что условие вокруг транспортного средства 1 является нормальным условием, если объект отсутствует, и распознает, что условие вокруг транспортного средства 1 является условием, при котором требуется напоминание или предупреждение, если объект присутствует.
ЭТАП SA3: ВЫЧИСЛЕНИЕ СТЕПЕНИ ОПАСНОСТИ
Если на этапе SA2 распознано, что условием вокруг транспортного средства 1 является условие, при котором требуется напоминание или предупреждение, то блок 14a вычисления опасности определяет местоположение позиции, в которой находится объект, на основании информации об объекте, которая измеряется на этапе SA1. Блок 14a вычисления опасности оценивает, что объект, позиция которого не может быть определена, имеет низкую степень опасности (т.е. оценивает, что условие вокруг транспортного средства 1 является условием, при котором требуется напоминание).
Применительно к объекту, позиция которого может быть определена, блок 14a вычисления опасности вычисляет расстояние между объектом и транспортным средством 1 и относительное замедление (которое может быть относительной скоростью или относительным ускорением) объекта по отношению к транспортному средству 1. Блок 14a вычисления опасности оценивает, что степень опасности высокая (т.е., оценивает, что условие вокруг транспортного средства 1 является условием, при котором требуется предупреждение), если расстояние короткое, и оценивает, что степень опасности низкая (т.е., оценивает, что условие вокруг транспортного средства 1 является условием, при котором требуется напоминание), если расстояние длинное. В дополнение, блок 14a вычисления опасности оценивает, что степень опасности низкая (т.е., оценивает, что условие вокруг транспортного средства 1 является условием, при котором требуется напоминание), если относительное замедление объекта по отношению к транспортному средству 1 низкое, и оценивает, что степень опасности высокая (т.е., оценивает, что условие вокруг транспортного средства 1 является условием, при котором требуется предупреждение), если относительное замедление высокое.
ЭТАП SA4: УСТАНОВКА ШАБЛОНА СВЕТОВОГО РАЗДРАЖЕНИЯ
На основании позиции, в которой находится объект, местоположение которой было определено на этапе SA3, и степени опасности объекта, которая оценена на этапе SA3, блок 15 управления подсветкой обращается к таблице, показанной на Фиг. 22, которая определяет взаимосвязь между позицией и степенью опасности объекта и проецируемой позицией и проецируемой площадью света, чтобы определить проецируемую позицию (проецируемую позицию в горизонтальном направлении и проецируемую позицию в вертикальном (по высоте) направлении) и проецируемую площадь света для уведомления, и если необходимо, определяет проецируемую позицию и проецируемую площадь света для локализации внимания. Например, проецируемая позиция света для уведомления (т.е., позиция, на которую проецируется свет для уведомления) устанавливается с левой стороны, если позицией, в которой находится объект, является левая сторона, устанавливается с передней стороны, если позицией является передняя сторона, и устанавливается с правой стороны, если позицией является правая сторона. С другой стороны, проецируемая позиция света для локализации внимания устанавливается с правой стороны, если проецируемой позицией света для уведомления является левая сторона, устанавливается с левой стороны, если проецируемой позицией света для уведомления является правая сторона, и не устанавливается, если проецируемая позиция света для уведомления находится с передней стороны или как с правой, так и с левой стороны. В дополнение, проецируемая площадь света для уведомления увеличивается во время предупреждения, когда степень опасности объекта высокая, и уменьшается, во время напоминания, когда степень опасности объекта низкая. С другой стороны, проецируемая площадь света для локализации внимания уменьшается таким образом, чтобы отличие от проецируемой площади света для уведомления было явным во время предупреждения, когда степень опасности объекта высокая, и незначительно уменьшалась, с тем чтобы отличие от проецируемой площади света для уведомления было не таким явным во время напоминания, когда степень опасности объекта низкая.
На основании степени опасности объекта, которая оценивается на этапе SA3, и статусов цвета и яркости, настроенных в соответствии с таблицами, показанными на Фиг. 12 и Фиг. 13 и сохраненными заранее, блок 15 управления подсветкой определяет цвет и яркость света для уведомления и, если необходимо, определяет цвет и яркость света для локализации внимания, которые отличаются от цвета и яркости света для уведомления. В дополнение, блок 15 управления подсветкой определяет величины изменения из расчета на единичное изменение (величины единичного изменения) цвета и яркости света для уведомления на основании степени опасности объекта, которая оценивается на этапе SA3. Например, как показано на Фиг. 23, величины единичного изменения цвета и яркости увеличиваются, если изменение степени опасности из расчета на единичное время большое, и величины единичного изменения цвета и яркости уменьшаются, если изменение степени опасности из расчета на единичное время небольшое.
Блок 15 управления подсветкой устанавливает шаблон подсветки для уведомления (напоминания или предупреждения), который включает в себя определенную проецируемую позицию, проецируемую площадь, цвет, яркость и величины единичного изменения света. Если на этапе SA2 распознается, что условием вокруг транспортного средства 1 является нормальное условие, при котором не требуется напоминание, то блок 15 управления подсветкой устанавливает нормальный шаблон подсветки, который включает в себя цвет или яркость для нормальных промежутков времени и отличается от шаблона подсветки для уведомления, на основании статусов цвета и яркости, отрегулированных в соответствии с таблицами, показанными на Фиг. 12 и Фиг. 13, и сохраненных заранее.
ЭТАП SA5: ОТОБРАЖЕНИЕ СО СВЕТОВЫМ РАЗДРАЖЕНИЕМ
Блок 15 управления подсветкой устанавливает (корректирует) центральную позицию светящейся панели 10 источников света на основании формы дороги, и на основании шаблона подсветки для промежутков времени уведомления или нормальных, установленного на этапе SA4, и установленной центральной позиции, блок 15 управления подсветкой выполняет управление подсветкой над каждым из источников 10a света, так чтобы получить шаблон подсветки.
Таким образом, при помощи описанных выше операции вычисления опасности и операции управления подсветкой, в ситуации, показанной на Фиг. 24, при которой требуется предупреждение (например, в ситуации, при которой объект 2 с высокой степенью опасности находится с левой стороны, если смотреть со стороны водителя), виртуальное изображение 31 для уведомления, установленное на основании степени опасности объекта 2, предоставляется с левой стороны, а виртуальное изображение 31 знака для локализации внимания, которое установлено таким образом, чтобы общее количество локализаций внимания водителя вокруг транспортного средства 1 было постоянным, также предоставляется с правой стороны, так, что общее количество локализаций внимания постоянно, и таким образом, в вышеприведенной ситуации, может быть сохранено однородное распределение внимания водителя вокруг транспортного средства 1 (т.е., внимание водителя может быть распределено однородно).
В дополнение, при помощи описанных выше операции вычисления опасности и операции управления подсветкой, в нормальной (безопасной) ситуации (например, ситуации, при которой вокруг транспортного средства 1 нет объекта), показанной на Фиг. 25, при которой не требуется напоминания или предупреждения, виртуальное изображение 31 для нормальных промежутков времени, которое имеет менее яркий и мягкий цветовой тон, и которое отличается от виртуального изображения 31 для уведомления, предоставляется, например, с левой стороны, в центре (с передней стороны), с правой стороны, или во всех из этих позиций, если смотреть со стороны водителя. В дополнение, когда нормальная ситуация меняется на ситуацию, показанную на Фиг. 26, при которой появляется объект 2 и требуется предупреждение, то уровень света части зеленого виртуального изображения 31 для нормальных промежутков времени в самой нижней области, которая соответствует позиции, в которой находится объект 2, или направлению, в котором находится объект 2 (часть самой нижней области с левой стороны на Фиг. 26) уменьшается, в то время как уровень света соответствующей части красного виртуального изображения 31 для предупреждения в самой верхней области (часть самой верхней области с левой стороны на Фиг. 26) увеличивается. Виртуальное изображение 31 может рассматриваться в качестве ряда световых точек, тянущихся по ширине транспортного средства. Зеленое виртуальное изображение 31 и красное виртуальное изображение 31 параллельны друг другу. Виртуальные изображения 31 могут отображаться на множестве разных позиций, таких как передняя стойка кузова, зеркало бокового вида, панель измерительных приборов и приборная панель. Посредством этого, когда нормальная ситуация меняется на ситуацию, при которой требуется напоминание или предупреждение, то существует возможность более естественного напоминания или предупреждения водителя, не вызывая чувства странности и неожиданности.
В дополнение, при помощи описанных выше операции вычисления опасности и операции управления подсветкой, если транспортное средство движется по прямой дороге в ситуации, при которой требуется уведомление, как показано на Фиг. 27, центральная позиция C во время подсветки устанавливается в (корректируется) центр (передняя сторона), если смотреть со стороны водителя, в соответствии с формой дороги, а когда транспортное средство 1 движется по дороге с правым поворотом, как показано на Фиг. 28, то центральная позиция C во время подсветки устанавливается на (корректируется в) правую сторону, если смотреть со стороны водителя, в соответствии с формой дороги, и затем виртуальное изображение 31 для уведомления предоставляется на основании установленной центральной позиции C. Посредством этого, существует возможность представления напоминания водителю или предупреждения водителя в пределах диапазона, который не выпадает за пределы поля зрения водителя (некоторый диапазон от направления взгляда водителя).
В дополнение, при помощи описанных выше операции вычисления опасности и операции управления подсветкой, в ситуации, при которой относительное замедление V объекта 2, который находится перед транспортным средством, низкое и требуется напоминание, как показано на Фиг. 29, предоставляется виртуальное изображение 31 для напоминания, в котором величины единичного изменения уменьшены, а в ситуации, при которой относительное замедление V объекта 2 высокое и требуется предупреждение, как показано на Фиг. 30, предоставляется виртуальное изображение 31 для предупреждения, в котором величины единичного изменения увеличены так, что существует возможность представления напоминания водителю или предупреждения водителя при помощи характеристик подсветки, которые приводят в соответствие относительную взаимосвязь между транспортным средством 1 и объектом.
3. СУЩНОСТЬ НАСТОЯЩЕГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ
В соответствии с настоящим вариантом осуществления, свет от множества источников 10a света, скомпонованных в матрице (множества строк или множества столбцов) в панели 10 источников света, смонтированной в предопределенной позиции приборной панели 22, проецируется на часть переднего ветрового стекла 20, которая соответствует позиции, в которой находится объект опасности (такой как пешеход, велосипед, транспортное средство и мертвая зона), или направлению, в котором находится объект опасности, при помощи цвета, яркости, площади, интервала или подобного, соответствующих степени опасности и подобному объекта опасности, чтобы напомнить или предупредить водителя. Например, в традиционной системе ночного видения, при обнаружении пешехода датчиком инфракрасного излучения в ночные часы, обнаруженный пешеход помещается в рамку, чтобы тем самым проинформировать его присутствие на экране; тем не менее, водителю сложно распознать соответствие между подробностями, отображаемыми на экране, и фактической ситуацией. Тем не менее, в соответствии с настоящим вариантом осуществления, существует возможность достоверного уведомления водителя о позиции и направлении объекта опасности более простым способом, а так же возможность уведомления водителя, не вызывая какого-либо неудобства и чувства странности.
В дополнение, в соответствии с настоящим вариантом осуществления, яркость (подаваемое напряжение) и цвет света от каждого источника 10a света устанавливаются на основании расстояния от позиции, в которой скомпонован источник 10a света, до проецируемой позиции света от источника 10a света на переднем ветровом стекле 20 и/или угла, образуемого между передним ветровым стеклом 20 и отрезком прямой, который соединяет позицию компоновки каждого источника 10a света и проецируемую позицию света от источника 10a света. Например, яркость света увеличивается с увеличением расстояния между источником 10a света и соответствующей проецируемой позицией. Посредством этого, свет, отражаемый от кузова транспортного средства, легче визуально распознается водителем, и, в результате, существует возможность повысить эффективность передачи информации. В дополнение, свет может регулироваться, чтобы легко распознавать позицию в соответствии с точкой глаз водителя.
В дополнение, в соответствии с настоящим вариантом осуществления, панель 10 источников света включает в себя механизм для регулировки яркости света (степени передачи света или степени размытости света) от каждого из источников 10a света. Таким образом, существует возможность исключения неудобства, связанного с интенсивностью света. Например, когда водителя побуждают к определению позиции или направления, яркость света уменьшается, чтобы размыть виртуальное изображение; в то время как, когда передается конкретная информация, такая как знак и пиктограмма, яркость света увеличивается для четкой передачи виртуального изображения. Посредством этого, водителю сложно сконцентрироваться на виртуальном изображении, и водитель имеет возможность без труда смотреть вперед. В дополнение, в случае, если передается конкретная информация, то яркость света уменьшается, чтобы размыть виртуальное изображение, когда транспортное средство 1 движется со скоростью, которая превышает предопределенную скорость. Посредством этого, во время остановки транспортного средства, стимулируется визуальное распознавание посредством центрального зрения с тем, чтобы была возможность предоставления подробной информации; тогда как во время движения транспортного средства, стимулируется визуальное распознавание посредством периферийного зрения с тем, чтобы была возможность передачи только присутствия и позиции опасности. Т.е., объем и качество передаваемой информации могут быть увеличены во время остановки транспортного средства; тогда как во время движения транспортного средства объем и качество передаваемой информации могут быть ограничены. В дополнение, только у источников 10a света, которые соответствуют проецируемой позиции света, распознаваемого водителем, выборочно уменьшается яркость света, чтобы частично размыть виртуальное изображение. Посредством этого, водителю становится сложно сконцентрироваться на виртуальном изображении, которое водитель видел единожды, так что время, в течение которого точка положения глаз фиксируется центральным зрением, может быть уменьшено. В дополнение, по мере роста качества и приоритета передаваемой информации, например, по мере увеличения степени опасности вокруг транспортного средства 1, яркость света увеличивается для четкого представления виртуального изображения. Посредством этого, важная информация может быть надежно передана водителю. В дополнение, направление линии взгляда, которому водитель должен уделять наибольшее значение, оценивается по форме дороги (повороту), и яркость света, проецируемого в данном направлении, уменьшается, чтобы размыть виртуальное изображение. Посредством этого, во время поворота, водителю сложно сконцентрироваться на виртуальном изображении в направлении взгляда, и таким образом лучше просматривается вид вперед. В дополнение, яркость света регулируется на основании расстояния от центрального зрения, чтобы менять степень размытости виртуального изображения. Посредством этого, учитывая свойство человека, состоящее в том, что более четкая форма может захватываться по мере того, как она приближается к центральному зрению, объем и качество передаваемой информации могут предоставляться более приемлемым образом.
В дополнение, в соответствии с настоящим вариантом осуществления, когда осуществляется уведомление о позиции, в которой находится объект, или направлении, в котором находится объект, то виртуальное изображение для уведомления, которое соответствует степени или подобному опасности объекта, предоставляется в части переднего ветрового стекла 20, соответствующей позиции, в которой находится объект, или направлению, в котором находится объект, а виртуальное изображение для локализации внимания, которое отличается от виртуального изображения для уведомления, предоставляется в позиции переднего ветрового стекла 20, соответствующей позиции или направлению, которые отличны от приведенной выше позиции или направления, в котором находится объект. Например, когда объект опасности находится с левой стороны или с правой стороны, то распределение характеристик подсветки регулируется (меняется) на основании степени опасности. Посредством этого, водителя точно побуждают к определению местоположения объекта, в то время как внимание водителя может быть однородно распределено вокруг транспортного средства, т.е., однородное распределение внимания водителя вокруг транспортного средства 1 может сохраняться в той же мере, что и во время нормальных промежутков времени. В дополнение, когда одновременно предоставляется множество виртуальных изображений, то уровни света виртуальных изображений могут меняться в зависимости от характеристик опасностей. В дополнение, водителя побуждают к распознаванию перемежающихся отдельных позиций не целиком, а по отдельности. Посредством этого, внимание может быть соответствующим образом локализовано на частях, которые должны быть распознаны, при этом указывая распознавание широкого диапазона. Следует отметить, что при уведомлении об информации с высокой важностью, виртуальное изображение для уведомления, которое соответствует данной информации, может предоставляться раньше, чем виртуальное изображение для локализации внимания.
В дополнение, в соответствии с настоящим вариантом осуществления, даже при нормальном условии, источники 10a света для левой стороны, центра или правой стороны спереди транспортного средства непрерывно горят, используя характеристики подсветки для нормальных промежутков времени. Посредством этого, когда нормальное условие меняется на условие уведомления, то напоминание водителю или предупреждение водителя могут предоставляться, не используя чрезмерно подсвеченного света и без чувства странности.
В дополнение, в соответствии с настоящим вариантом осуществления, резкость ступенчатого изменения цвета и яркости света меняется на основании изменения степени опасности вокруг транспортного средства 1. Например, когда изменение степени опасности вокруг транспортного средства 1 большое, то свет проецируется таким образом, что размеры изменения яркости и/или света из расчета на единицу изменения увеличиваются, т.е., яркость и/или цвет меняются резко; в то время как, когда изменение степени опасности вокруг транспортного средства 1 небольшое, свет проецируется таким образом, что размеры изменения яркости и/или цвета из расчета на единицу изменения уменьшаются, т.е. яркость и/или цвет меняются более гладко. Т.е., размеры изменения яркости и/или цвета света меняются на основании взаимосвязи между яркостью и/или цветом света и опасностью. Посредством этого, изменение степени опасности может четко передаваться водителю посредством изменения образа действий по ощущению опасности. В дополнение, резкость ступенчатого изменения цвета или яркости света меняется на основании приоритета передаваемой информации. Например, когда передается информация с высоким приоритетом, то свет проецируется таким образом, что размеры изменения яркости и/или цвета из расчета на единицу изменения, увеличиваются, т.е. яркость и/или цвет меняются резко; в то время как, когда передается информация с низким приоритетом, размеры изменения яркости и/или цвета из расчета на единицу изменения, уменьшаются, т.е. яркость и/или цвет меняются более гладко. Посредством этого, водителю может четко передаваться важность информации.
Как описано выше, устройство передачи информации транспортного средства в соответствии с аспектом изобретения полезно в отрасли строения транспортных средств и, в частности, пригодно для передачи информации водителю с использованием кузова транспортного средства.
Изобретения относятся к устройству передачи информации транспортного средства. Устройство передачи информации транспортного средства указывает распознавание некоторого объекта. Устройство передачи информации транспортного средства содержит первую часть отображения, которая указывает проверку правой стороны относительно позиции водителя и вторую часть отображения, которая указывает проверку левой стороны относительно позиции водителя. При указании контроля некоторого объекта с правой стороны или с левой стороны первая часть отображения и вторая часть отображения соответственно указывают проверку правой стороны и проверку левой стороны. Достигается возможность осуществления передачи информации для водителя об окружающих объектах. 2 н. и 8 з.п. ф-лы, 30 ил.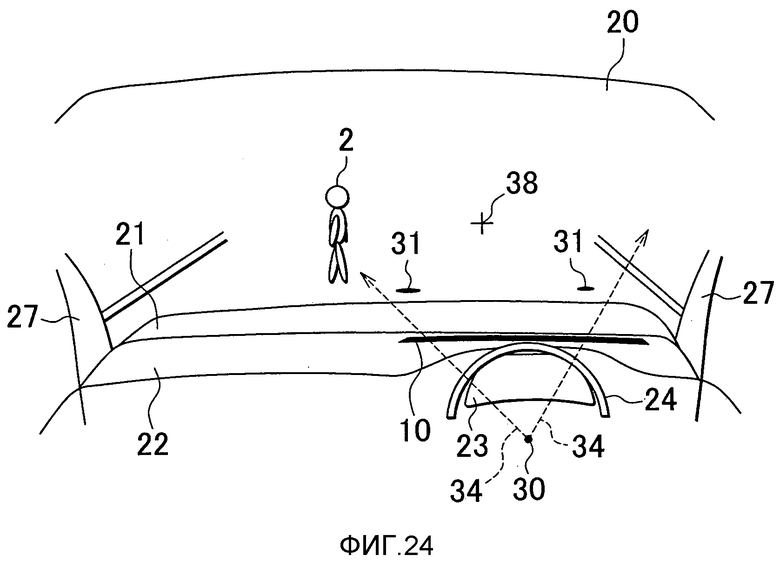
1. Устройство передачи информации транспортного средства, которое указывает распознавание некоторого объекта, отличающееся тем, что устройство передачи информации транспортного средства указывает и распознавание некоторого объекта и распознавание позиции, отличной от позиции упомянутого некоторого объекта; в случае, если позицией некоторого объекта является левая сторона относительно позиции водителя, то позицией, отличной от позиции некоторого объекта, является правая сторона относительно позиции водителя; а в случае, если позицией некоторого объекта является правая сторона относительно позиции водителя, то позицией, отличной от позиции некоторого объекта, является левая сторона относительно позиции водителя.
2. Устройство передачи информации транспортного средства по п.1, содержащее устройство отображения, которое указывает распознавание некоторого объекта, проецируя свет на некоторую часть на кузове транспортного средства, и которое указывает распознавание позиции, отличной от позиции некоторого объекта, проецируя свет на часть, отличную от упомянутой некоторой части на кузове транспортного средства.
3. Устройство передачи информации транспортного средства по п.2, в котором устройство отображения установлено внутри транспортного средства, и устройство отображения проецирует свет на переднее ветровое стекло.
4. Устройство передачи информации транспортного средства по п.3, в котором устройство отображения установлено на приборной панели.
5. Устройство передачи информации транспортного средства по п.1, в котором позиция некоторого объекта и позиция, отличная от позиции некоторого объекта, находятся на расстоянии друг от друга.
6. Устройство передачи информации транспортного средства по п.1, в котором образ действий по указанию распознавания некоторого объекта отличается от образа действий по указанию распознавания позиции, отличной от позиции некоторого объекта.
7. Устройство передачи информации транспортного средства по п.1, при этом устройство передачи информации транспортного средства указывает распознавание позиции, отличной от позиции некоторого объекта, во время указания распознавания некоторого объекта.
8. Устройство передачи информации транспортного средства, отличающееся тем, что содержит первую часть отображения, которая указывает проверку правой стороны относительно позиции водителя; и вторую часть отображения, которая указывает проверку левой стороны относительно позиции водителя, при этом при указании контроля некоторого объекта с правой стороны или с левой стороны, первая часть отображения и вторая часть отображения соответственно указывают проверку правой стороны и проверку левой стороны.
9. Устройство передачи информации транспортного средства по п.8, в котором первая часть отображения и вторая часть отображения соответственно проецируют свет на разные части кузова транспортного средства для указания проверки правой стороны и проверки левой стороны.
10. Устройство передачи информации транспортного средства по п.9, в котором при указании контроля некоторого объекта с правой стороны, площадь света, проецируемого от второй части отображения, меньше площади света, проецируемого от первой части отображения, и при указании контроля некоторого объекта с левой стороны, площадь света, проецируемого от первой части отображения, меньше площади света, проецируемого от второй части отображения.
| EP 1785326 A1, 16.05.2007 | |||
| JP 2009113770 A, 28.05.2009 | |||
| JPH 08115491 A, 07.05.1996 | |||
| JP 2010176591 A, 12.08.2010 | |||
| JP 2000172994 A, 23.06.2000 |

