Изобретение относится к машиностроению, а именно к устройствам для преобразования неравномерного вращательного движения в равномерное вращательное движение, например колебательно-вращательного движения роторов лопаток в равномерное движение выходного вала, и наоборот.
Известен механизм для преобразования движения, содержащий корпус, ведущий вал, кулачок, установленный на корпусе соосно ведущему валу, диск с направляющими, ромбический шарнирный четырехзвенник с пальцами, взаимодействующими с кулачком и направляющими, дополнительный ведущий вал, установленный соосно основному ведущему валу, рычаги и ведомый вал, ведущие валы шарнирно соединены рычагами с серединами противоположных сторон шарнирного четырехзвенника, а диск установлен с возможностью вращения и механически связан с ведомым валом (см. а.с. 724850 от 30.05.78 г.).
Недостатком данного устройства является отсутствие плавности преобразования движения.
Наиболее близким к заявляемому по совокупности существенных признаков и достигаемому результату является механизм для преобразования движения, содержащий корпус, основной ведущий вал, второй ведущий полый вал, установленный соосно основному ведущему валу, ведомый вал, являющийся валом отбора мощности, и узел преобразования движения, включающий профилированный кулачок, диск с направляющими на плоскости диска в форме прорезей, ромбический шарнирный четырехзвенник с пальцами, расположенными в его вершинах и взаимодействующими с кулачком и направляющими, ведущие валы шарнирно соединены рычагами с серединами противоположных сторон четырехзвенника, диск установлен с возможностью вращения и механически связан с ведомым валом, а профиль кулачка, описываемый зависимостью полярного радиуса от полярного угла α и длины стороны четырехзвенника, представляет эквидистанту, отстоящую на величину радиуса пальца внутрь от базовой замкнутой кривой (см. патент РФ 2374526 от 01.10.2007).
Известное устройство работает следующим образом. При приложении к ведущим валам переменных взаимно противоположных одинаковых вращающих моментов пальцы шарнирного четырехзвенника скользят по профилю кулачка и, двигаясь по направляющим, передают вращение диску. Он суммирует моменты ведущих валов и, передавая суммарный момент ведомому валу, приводит его во вращение.
В известном устройстве увеличена надежность механизма преобразования движения за счет улучшения плавности преобразования путем обеспечения синусоидального изменения угла между рычагами при одновременном равномерном вращении диагоналей четырехзвенника по полярному углу. Однако при любом другом профиле кулачка, не относящемся к семейству эквидистант, а также другом размещении пальцев на четырехзвеннике и расположении направляющих на диске преобразование будет сопровождаться рывками и ударами (нарушение плавности). Безвариантное выполнение, довольно сложная конструкция, относительная сложность изготовления большого количества нестандартных деталей уменьшает преимущества известного устройства.
Поставлена задача повышения надежности, кпд и технологичности изготовления заявляемого механизма.
Технический результат по увеличению надежности и кпд достигается за счет упрощения механизма, уменьшения количества трущихся деталей. Технологичность повышена за счет использования в основном серийно изготовляемых деталей и в значительно меньшем количестве, чем в прототипе.
Поставленная задача достигается тем, что в механизме преобразования движения, содержащем корпус, ведущий вал, второй полый вал, установленный соосно ведущему валу, и узел преобразования движения, согласно изобретению, узел преобразования выполнен в виде установленного в корпусе соосно валам диска, в центре которого выполнена профилированная дорожка качения, между которой и полым валом размещены четное число роликов, половина из которых вращаются вокруг собственной оси и попарно и крестообразно жестко связаны через кронштейны с ведущим и вторым валами, а остальные свободно расположены между жестко связанными роликами и дорожкой качения, причем ведущий вал является валом отбора мощности.
Поставленная задача достигается также тем, что ролики выполнены полыми. Поставленная задача достигается также тем, что свободные ролики по диаметру больше жестко закрепленных на величину, исключающую касания жесткими роликами дорожки качения.
Поставленная задача достигается также тем, что при увеличении числа жестко связанных роликов с кратностью больше одного их располагают на своей оси вращения параллельно, причем свободные ролики смещены по этой оси, а ширина дорожки качения пропорционально увеличивается.
Поставленная задача достигается также тем, что диск установлен в корпусе на упругих элементах.
На фиг.1 показан общий вид механизма с узлами, разделенными в аксиальном направлении.
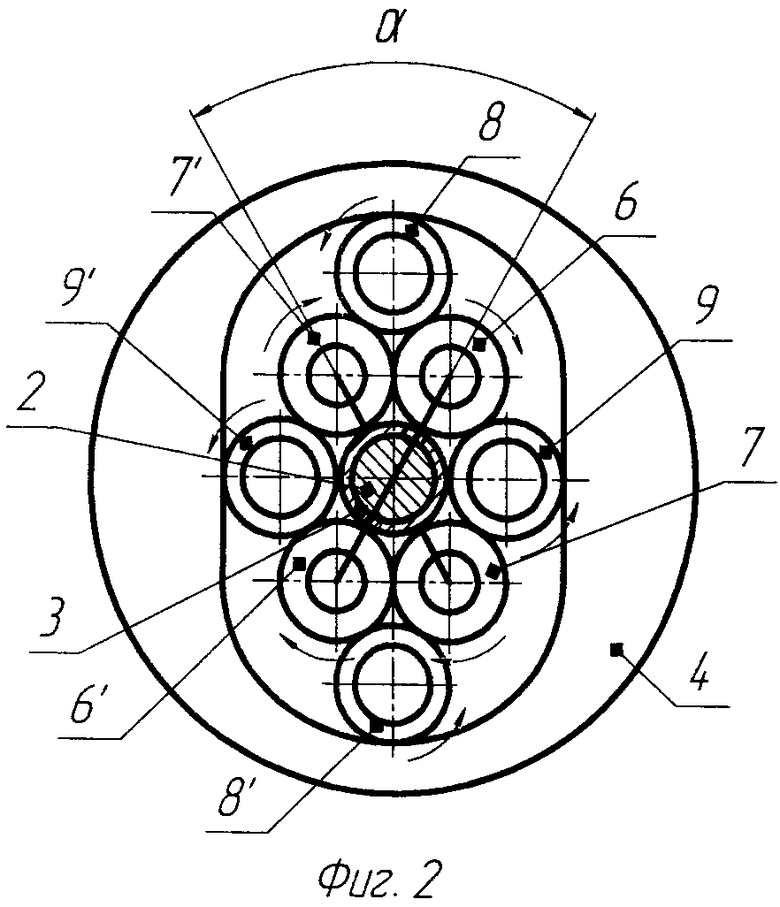
На фиг.2 показано условно исходное положение роликов в профилированной дорожке качения диска с углом между осями пар жестко закрепленных роликов α=60 град.
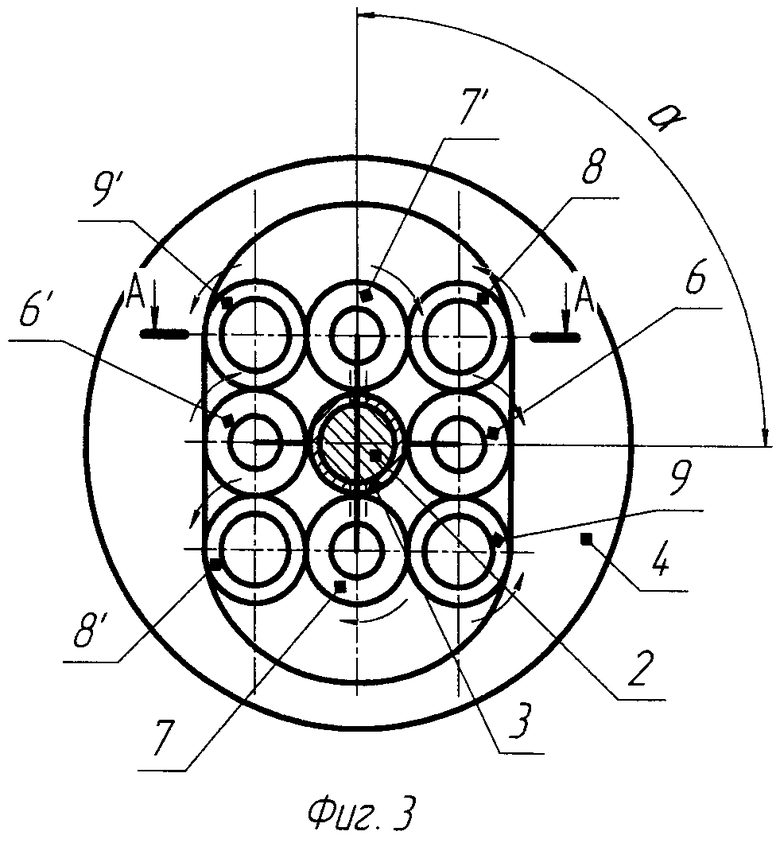
На фиг.3 показано положение роликов в дорожке качения при повороте ведущего вала на 60 градусов, при этом угол α=90 град.
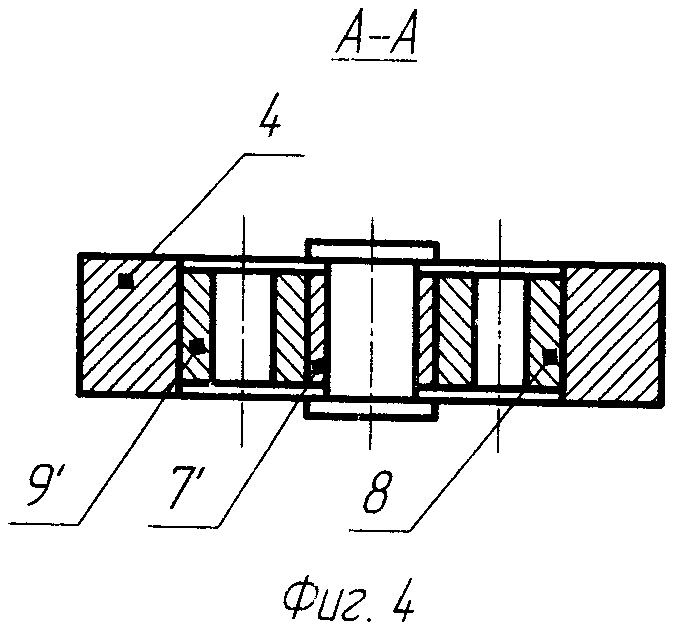
На фиг.4 изображен разрез по А-А на фиг.3.
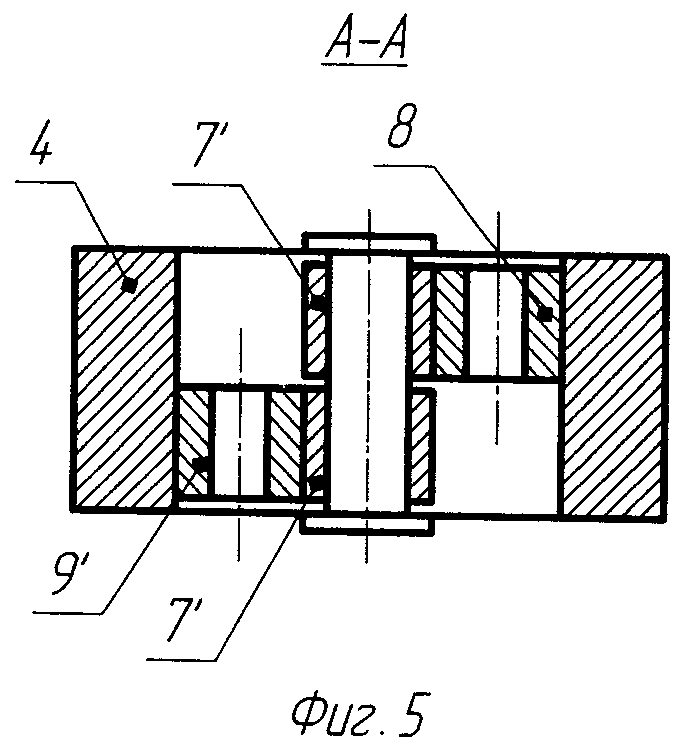
На фиг.5 показана схема размещения удвоенного количества жестких роликов по своей оси вращения со смещением свободных роликов по этой оси. В этом случае ширина диска пропорционально увеличена.
Наилучший вариант выполнения заявляемого механизма для преобразования движения по фиг.1-5 содержит корпус 1, ведущий вал 2, который является валом отбора мощности, второй полый вал 3, который установлен соосно ведущему валу 2, и узел преобразования движения, включающий расположенный соосно валам 2, 3 диск 4, в центре которого выполнена профилированная дорожка качения 5, между которой и валом 2 размещены восемь полых роликов, четыре из которых 6-6' и 7-7' вращаются вокруг собственной оси и попарно и крестообразно жестко связаны с ведущим 2 и вторым 3 валами через кронштейны 10 и 11 соответственно, остальные четыре ролика 8-8' и 9-9' свободно расположены между жестко связанными роликами 6-6' и 7-7' и дорожкой качения 5. Например, при использовании заявляемого механизма преобразования движения в роторно-лопастном двигателе внутреннего сгорания (РЛДВС) ролики 6-6' через кронштейн 10, ведущий вал 2 будут соединены с лопастями первого ротора, а ролики 7-7' через кронштейн 11, вал 3 будут соединены с лопастями второго ротора. Ролики на фиг.1-5 выполнены цилиндрическими, но могут быть бочкообразной, шаровой и другой формы.
Работу заявляемого механизма рассмотрим на примере его работы в составе с РЛДВС. При запуске РЛДВС начинает вращаться первый ротор и, следовательно, ведущий вал 2 и ролики 6-6'. При этом ролики 6-6' давят на ролики 8-8', перемещая их. Последние, в свою очередь, давят на ролики 7-7', которые перемещают ролики 9-9'. Все ролики катятся внутри дорожки 5, причем жестко закрепленные ролики 6-6' и 7-7', вращаясь вокруг собственной оси, не касаются дорожки качения 5, так как выполнены с меньшим диаметром, чем свободно расположенные ролики 8-8' и 9-9'. Вал 2, а следовательно, и лопасти первого ротора, за счет разности инерции с валом 3 вращаются с постоянной угловой скоростью, а вал 3 с лопастями второго ротора совершают колебательные движения. За один оборот жестко соединенных роликов внутри профиля дорожки качения 5 проходит полный цикл работы четырехтактного РЛДВС. Ударные нагрузки, возникающие в РЛДВС, а следовательно, и в валах, скомпенсированы за счет упругих элементов в виде полых роликов, а диск 4 с профилированной дорожкой качения 5 установлен в корпусе на упругих элементах (на фиг.1-5 не показаны). Механизм может работать и с жестко установленным диском в корпусе 1, но с меньшей эффективностью. Для уменьшения силы трения скольжения роликов между собой используется вариант выполнения по фиг.5 с удвоенным количеством жестко связанных роликов 6-6' и 7-7'. Профиль дорожки качения 5 рассчитывается обычным проектированием, исходя из угла α между роликами 6-6' и 7-7' (угол схождения и расхождения роликов 6-6' и 7-7').
Основным достоинством заявляемого механизма по сравнению с прототипом является простота и технологичность изготовления, так как резко уменьшено количество деталей, большинство из которых, за исключением диска с профилированной дорожкой качения, серийного производства. Использование ведущего вала в качестве вала отбора мощности устранило необходимость использования дополнительного третьего вала для отбора мощности. За счет уменьшения числа деталей, а также количества трущихся деталей уменьшилась осевая нагрузка на валы, а следовательно, увеличилась надежность, кпд механизма и долговечность эксплуатации. Таким образом, имеем большой выигрыш и в качестве, и в цене.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2014 |
|
RU2565940C1 |
| АВТОМАТИЧЕСКИЙ ИНЕРЦИОННЫЙ ТРАНСФОРМАТОР | 2013 |
|
RU2531856C2 |
| Зубчатый механизм преобразования вращательного движения в неравномерное | 2020 |
|
RU2755829C1 |
| Зубчатый механизм преобразования вращательного движения в неравномерное | 2020 |
|
RU2759121C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2016 |
|
RU2651106C2 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛА | 2008 |
|
RU2387844C2 |
| СПОСОБ ПОЛУЧЕНИЯ ОБЪЕМНЫХ ПРОФИЛЬНЫХ ИЗДЕЛИЙ НА КОПИРОВАЛЬНО-ФРЕЗЕРНОМ СТАНКЕ И УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЗАГОТОВОК ИЗ ДЕРЕВА И ДРУГИХ ТВЕРДЫХ МАТЕРИАЛОВ | 2002 |
|
RU2245243C2 |
| СПОСОБ РАБОТЫ РОТОРНОГО ДВИГАТЕЛЯ И РОТОРНЫЙ ДВИГАТЕЛЬ ХОЛОДНОГО | 2009 |
|
RU2464432C2 |
| РОТОРНО-ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2488704C2 |
| ШАРИКОВЫЙ ПЕРЕДАЮЩИЙ УЗЕЛ ПРЕОБРАЗОВАТЕЛЯ СКОРОСТИ (ВАРИАНТЫ) | 2004 |
|
RU2291993C2 |
Изобретение относится к машиностроению, а именно к устройствам для преобразования неравномерного вращательного движения в равномерное и наоборот. Механизм содержит корпус (1), ведущий вал (2), являющийся валом отбора мощности, полый вал (3), установленный соосно ведущему, и узел преобразования движения. Узел преобразования движения выполнен в виде установленного в корпусе соосно валам диска (4), в центре которого выполнена профилированная дорожка качения (5). Между валом (2) и дорожкой качения размещено четное количество роликов, половина из которых вращаются вокруг собственной оси и попарно и крестообразно жестко связаны через кронштейны (10) и (11) с ведущим и полым валами. Остальные ролики свободно расположены между дорожкой качения (5) и жестко связанными роликами. Обеспечивается повышение надежности и КПД механизма. 4 з.п. ф-лы, 5 ил.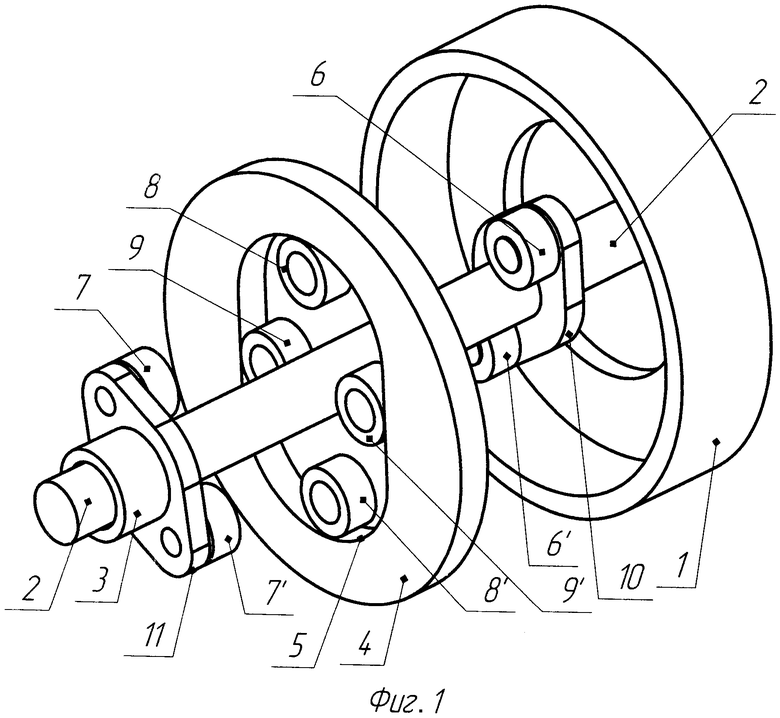
1. Механизм для преобразования движения, содержащий корпус, ведущий вал, второй полый вал, установленный соосно ведущему валу, и узел преобразования движения, отличающийся тем, что узел преобразования выполнен в виде установленного в корпусе соосно валам диска, в центре которого выполнена профилированная дорожка качения, между которой и вторым валом размещено четное число роликов, половина из которых вращаются вокруг собственной оси и попарно и крестообразно жестко связаны через кронштейны с ведущим и вторым валами, а остальные свободно расположены между жестко связанными роликами и дорожкой качения, причем ведущий вал является валом отбора мощности.
2. Механизм по п.1, отличающийся тем, что ролики выполнены полыми.
3. Механизм по п.1 или 2, отличающийся тем, что свободные ролики по диаметру больше жестко связанных на величину, исключающую касание жестко связанными роликами дорожки качения.
4. Механизм по п.1 или 2, отличающийся тем, что при увеличении числа жестко связанных роликов с кратностью больше одного их располагают на своей оси вращения параллельно, причем свободно расположенные ролики смещены по этой оси, а ширина дорожки качения пропорционально увеличивается.
5. Механизм по п.1, отличающийся тем, что диск установлен в корпусе на упругих элементах.
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2007 |
|
RU2374526C2 |
| Механизм для преобразования движения | 1978 |
|
SU724850A1 |
| DE 4431685 A1, 14.03.1996 | |||
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ РАВНОМЕРНОГО ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В НЕРАВНОМЕРНОЕ ВРАЩАТЕЛЬНОЕ | 1989 |
|
RU2022183C1 |

