Изобретение относится к машиностроению, в частности к устройствам для преобразования равномерного вращательного движения в неравномерное вращательное и наоборот.
Известен механизм для преобразования движения, содержащий три вала с кривошипами, соединенными между собой двумя тягами [1]. Кроме того, известен механизм для преобразования движения, содержащий корпус, основной ведущий вал, кулачок, установленный на корпусе соосно ведущему валу, диск с направляющими и ромбический шарнирный четырехзвенник с пальцами, взаимодействующими с кулачком и направляющими [2].
Наиболее близким аналогом к заявленному является механизм для преобразования движения, содержащий корпус, основной ведущий вал, кулачок, установленный на корпусе соосно ведущему валу, диск с направляющими, ромбический шарнирный четырехзвенник с пальцами, взаимодействующими с кулачком и направляющими, установленный соосно в основном ведущем валу дополнительный ведущий вал, рычаги и ведомый вал, ведущие валы шарнирно соединены рычагами с серединами противоположных сторон шарнирного четырехзвенника, диск установлен с возможностью вращения и механически связан с ведомым валом [3].
Недостатком данного устройства является отсутствие плавности преобразования движения.
Целью изобретения является достижение плавности преобразования движения.
Поставленная цель достигается тем, что в механизме для преобразования движения, который содержит корпус, основной ведущий вал, кулачок, установленный на корпусе соосно ведущему валу, диск с направляющими, ромбический шарнирный четырехзвенник с пальцами, взаимодействующими с кулачком и направляющими, установленный соосно в основном ведущем валу дополнительный ведущий вал, рычаги и ведомый вал, причем ведущие валы шарнирно соединены рычагами с серединами противоположных сторон шарнирного четырехзвенника, а диск установлен с возможностью вращения и механически связан с ведомым валом, согласно изобретению пальцы расположены в вершинах шарнирного четырехзвенника, направляющие расположены симметрично вдоль взаимно перпендикулярных осей симметрии на плоскости диска, а профиль кулачка представляет эквидистанту, отстоящую на величину радиуса пальца внутрь от базовой замкнутой кривой, описываемой следующей формулой:

где ρ(α) - полярный радиус;
α=0…2π - полярный угол;
L - длина стороны ромбического четырехзвенника;
Ψmin - минимальный угол между сторонами ромбического четырехзвенника;
π - число Пи.
Сущность изобретения и достигаемый результат более подробно поясняются далее на конкретном примере реализации механизма со ссылкой на прилагаемые чертежи, на которых изображено:
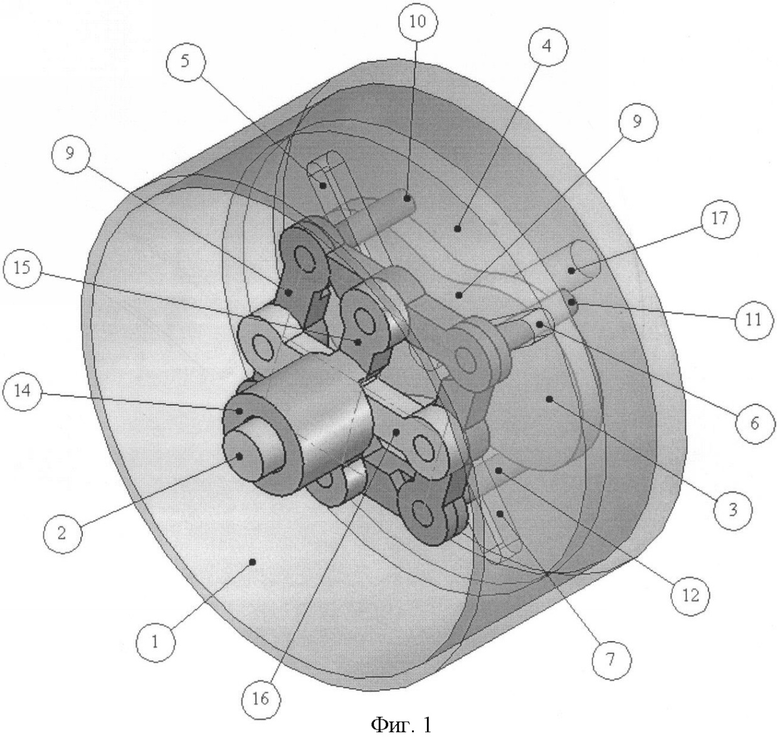
- на фиг.1 - общий вид механизма;
- на фиг.2 - общий вид механизма с узлами, разделенными в аксиальном направлении;
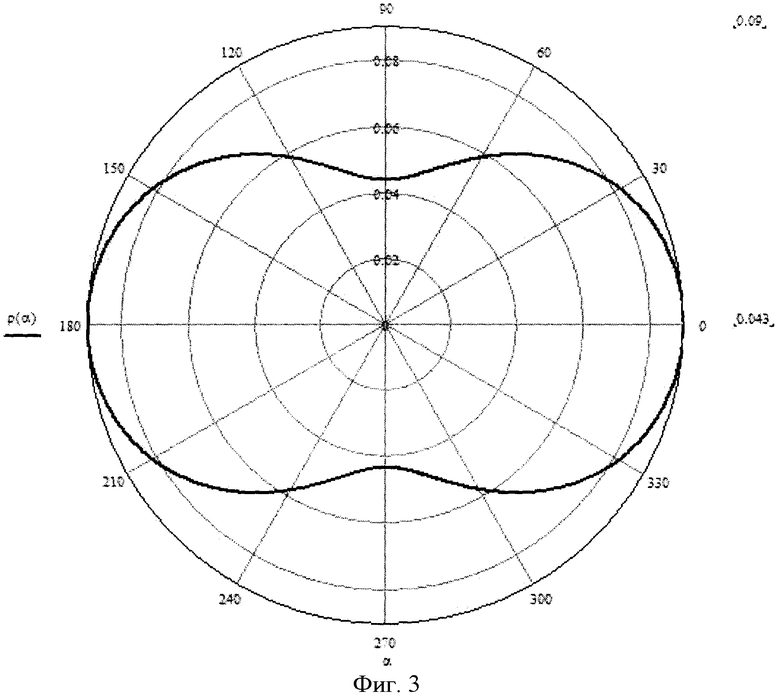
- на фиг.3 - расчетная базовая замкнутая кривая кулачка при исходных данных
Ψmin=51,4°; L=0,1 м;
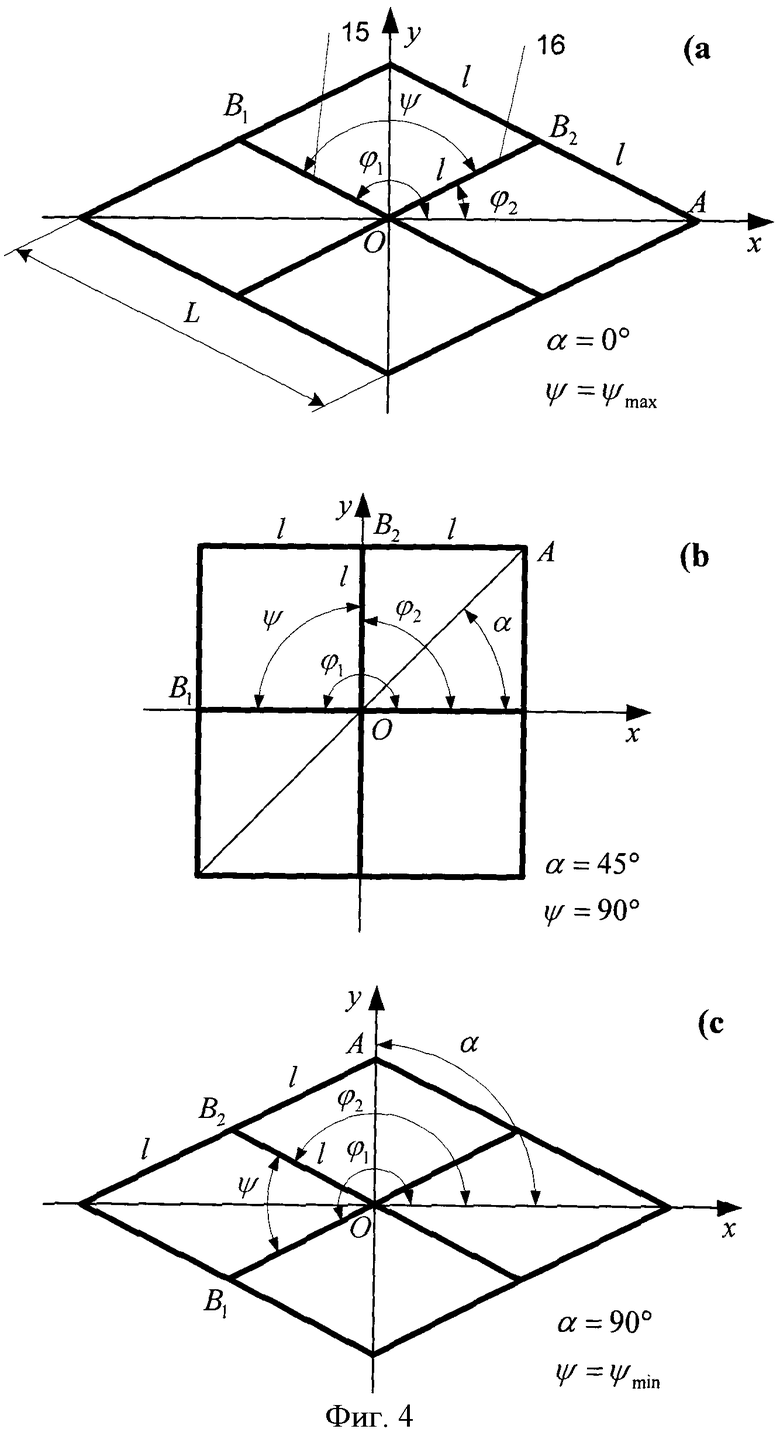
- на фиг.4 - три характерные фазы движения ромбического четырехзвенника;
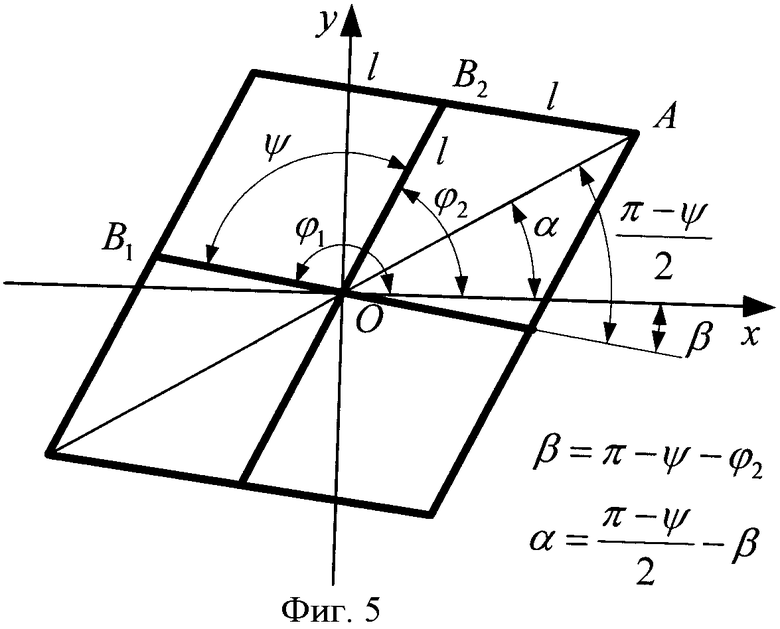
- на фиг.5 - некоторое промежуточное положение ромбического четырехзвенника в процессе движения;
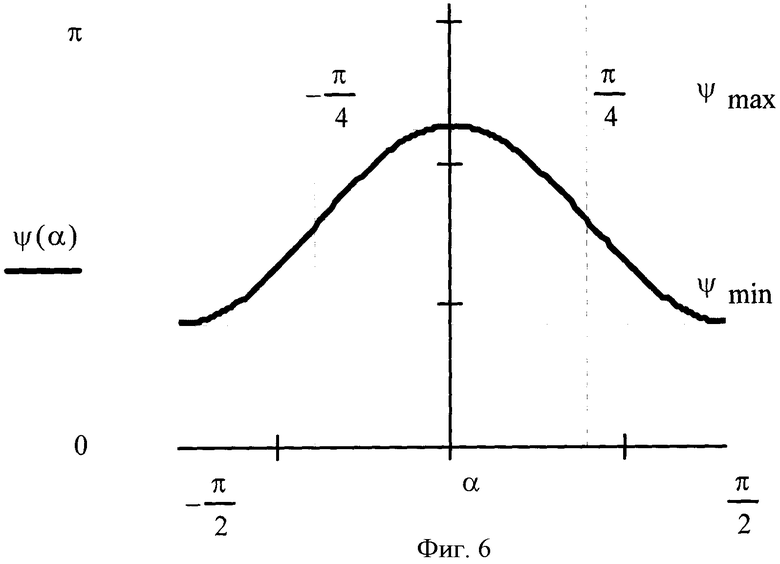
- на фиг.6 - график функции Ψ(α).
Механизм для преобразования равномерного вращательного движения в неравномерное вращательное и наоборот (фиг.1, 2) содержит корпус 1, основной ведущий вал 2, кулачок 3, установленный на корпусе соосно ведущему валу, диск 4 с направляющими 5…8 (направляющая 8 видна на фиг.2). Направляющие расположены симметрично вдоль взаимно перпендикулярных осей симметрии на плоскости диска 4 и выполнены, например, в форме одинаковых прямых сквозных прорезей в диске. Ромбический шарнирный четырехзвенник 9 имеет пальцы 10…13, расположенные в его вершинах (палец 13 виден на фиг.2), которые взаимодействуют с кулачком 3 и направляющими 5…8. В конкретной конструкции пальцы расположены аксиально, проходят через направляющие (прорези) 5…8 и опираются на профиль (внешнюю кромку) кулачка 3. Соосно с основным ведущим валом 2 установлен дополнительный ведущий вал 14, имеющий, например, форму полого вала. Ведущий вал 2 жестко соединен с серединой рычага 16, а ведущий вал 14 - с серединой рычага 15. Концы рычагов 15, 16 шарнирно связаны с серединами противоположных сторон шарнирного четырехзвенника 9. Диск 4 установлен с возможностью вращения и жестко (либо при помощи жесткой механической передачи) связан с ведомым валом 17. Новым является то, что профиль кулачка 3 представляет эквидистанту, отстоящую на величину радиуса пальца 10…13 внутрь от базовой (опорной) замкнутой кривой, описываемой следующей формулой (график базовой кривой приведен на фиг.3):

где ρ(α) - полярный радиус;
α=0…2π - полярный угол;
L - длина стороны ромбического четырехзвенника;
Ψmin - минимальный угол между сторонами ромбического четырехзвенника;
π - число Пи.
Механизм для преобразования движения работает следующим образом.
При приложении к ведущим валам 2 и 14 переменных взаимно противоположных одинаковых вращающих моментов, пальцы 10…13 ромбического шарнирного четырехзвенника 9 обкатываются (или скользят) по профилю кулачка 3 и, двигаясь по направляющим 5…8, передают вращение диску 4. Он суммирует моменты валов 2, 14 и, передавая суммарный момент ведомому валу 17, приводит его во вращение.
Механизм способен передавать движение и в обратной последовательности. Пояснение принципа действия устройства в данном направлении преобразования представляется более удобным для восприятия.
При вращении внешним движителем ведомого вала 17 с постоянной скоростью, он передает вращение диску 4. Направляющие 10…13 диска воздействуют на пальцы, которые, обкатываясь по профилю кулачка, совершают одновременно два движения: равномерное вращательное - вокруг оси валов и возвратно-поступательное - вдоль направляющих. Эти два движения передаются через пальцы ромбическому шарнирному четырехзвеннику (его вершинам). В результате возвратно-поступательного движения вершин он периодически плавно меняет конфигурацию относительно своих диагоналей (одна диагональ удлиняется, другая сокращается, затем - наоборот). При этом диагонали ромбического шарнирного четырехзвенника совершают равномерное вращательное движение вокруг оси валов. Через рычаги 15, 16 движение ромбического шарнирного четырехзвенника передается в преобразованном виде двум связанным с ними валам 2, 14. При этом каждый из этих валов совершает одинаковое по форме неравномерно-вращательное движение (в конкретной конструкции - синусоидально-вращательное) со сдвигом по фазе друг относительно друга на 
Расчетный профиль кулачка обеспечивает плавное преобразование равномерного вращения в неравномерное (и наоборот) за счет обеспечения синусоидального изменения угла Ψ между рычагами 15, 16 от Ψmin до Ψmax при одновременном равномерном вращении диагонали (диагоналей) ромбического шарнирного четырехзвенника 9 по углу α (см. фиг.2, 3).
Для вывода формулы (1), описывающей профиль кулачка, построим расчетные схемы для ромбического шарнирного четырехзвенника 9 (далее - ромба): на фиг.4 (а, b, с) показаны три характерные фазы движения ромба, а на фиг.5 - некоторое промежуточное положение ромба в процессе движения. На фиг.6 - график функции ψ(α).
Исходными требованиями при выводе формулы является обеспечение синусоидального характера изменения угла Ψ между рычагами 15, 16 от Ψmin до Ψmax при одновременном равномерном вращении диагонали (диагоналей) ромба по углу α.
Вначале для упрощения примем радиус пальцев 10…13 равным нулю.
При заданной длине стороны ромба L=21 (фиг.4, 5) этот четырехзвенник имеет две степени свободы. Его конфигурация полностью определяется значениями углов φ1 и
φ2 рычагов 15 и 16 с осью х. Данные углы можно считать входными переменными исследуемой системы.
За выходные переменные примем координаты хА и уА вершины ромба А, либо длину полудиагонали ρ=OA (полярный радиус) и угол α между OA и осью х (полярный угол), при этом имеем
Важным кинематическим параметром является угол ψ между рычагами 15 и 16:

Угол ψ может меняться в пределах

где значения ψmin и ψmax задаются из конструктивных соображений.
Из фиг.4, 5 следует
или

Чтобы найти соотношение связи между углами ψ и α, обратимся к схемам на фиг.4. Из них следует, что
Функция ψ(α) четна с периодом, равным π, поэтому ее можно представить в виде суммы среднего за период значения и гармонической составляющей (фиг.6), т.е

или с учетом того, что ψmax=π-ψmin получим
Подставив (7) в (6), получаем искомую формулу для профиля кулачка при условии равенства нулю радиусов пальцев 10…13 (вместо пальце фигурируют их оси):

Таким образом, полученная формула описывает траекторию движения осей пальцев - базовую (опорную) кривую (1) (фиг.3).
Учитывая радиус реального пальца, сформулируем следующее утверждение: профиль кулачка в радиальной плоскости представляет эквидистанту, отстоящую на величину радиуса пальца внутрь от базовой замкнутой кривой, описываемой формулой (1).
За счет расчетного профиля кулачка достигается плавное преобразование равномерного вращения в неравномерное (и наоборот) за счет обеспечения синусоидального характера изменения угла Ψ между рычагами 15, 16 от Ψmin до Ψmax при одновременном равномерном вращении диагонали (диагоналей) ромбического шарнирного четырехзвенника 9 по углу α (см. фиг.2, 3). При любом другом профиле кулачка, не относящемся к семейству эквидистант с расчетной базовой кривой (1), а также другом размещении пальцев на ромбе и расположении направляющих на диске преобразование движения будет сопровождаться рывками и ударами (нарушение плавности преобразования). Поэтому приведенной совокупностью признаков достигается сверхсуммарный полезный эффект, заключающийся в достижении плавности преобразования.
Источники информации
1. Гуськов Г.Г. Необычные двигатели. М.: «Знание», 1971, с.28.
2. Артоболевский И.И. Механизмы в современной технике. Т.4. М.: «Наука», 1975, с.210, фиг.977.
3. Авторское свидетельство №724850. Заявлено 30.05.78/Лукьянов Ю.Н., Котляров В.Н. // Опуб. 30.03.80. Бюл. №12.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ С ВНЕШНИМ ПОДВОДОМ ТЕПЛА | 2008 |
|
RU2387844C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2016 |
|
RU2651106C2 |
| РОТОРНАЯ РАСШИРИТЕЛЬНАЯ МАШИНА | 2015 |
|
RU2619391C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2013 |
|
RU2531854C2 |
| Зубчатый механизм преобразования вращательного движения в неравномерное | 2020 |
|
RU2759121C1 |
| Зубчатый механизм преобразования вращательного движения в неравномерное | 2020 |
|
RU2755829C1 |
| МУФТА ПРЕДОХРАНИТЕЛЬНАЯ | 2013 |
|
RU2537054C1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2020 |
|
RU2754184C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 2018 |
|
RU2673318C9 |
| СКЛАДЫВАЮЩИЙСЯ МНОГОКРАТНЫЙ КРИВОШИПНО-КОРОМЫСЛОВЫЙ МЕХАНИЗМ | 2024 |
|
RU2833554C1 |
Изобретение относится к машиностроению, в частности к устройствам для преобразования равномерного вращательного движения в неравномерное вращательное и наоборот. Механизм содержит корпус, основной ведущий вал, кулачок, установленный на корпусе соосно ведущему валу, диск с направляющими, ромбический шарнирный четырехзвенник с пальцами, взаимодействующими с кулачком и направляющими, дополнительный ведущий вал, установленный соосно в основном ведущем валу, рычаги и ведомый вал. Ведущие валы шарнирно соединены рычагами с серединами противоположных сторон шарнирного четырехзвенника. Диск установлен с возможностью вращения и механически связан с ведомым валом. Пальцы расположены в вершинах шарнирного четырехзвенника. Направляющие расположены симметрично вдоль взаимно перпендикулярных осей симметрии на плоскости диска. Профиль кулачка описывается зависимостью полярного радиуса от полярного угла и длины стороны шарнирного четырехзвенника и представляет эквидистанту, отстоящую на величину радиуса пальца внутрь от базовой замкнутой кривой. Решение направлено на достижение плавности преобразования движения. 6 ил.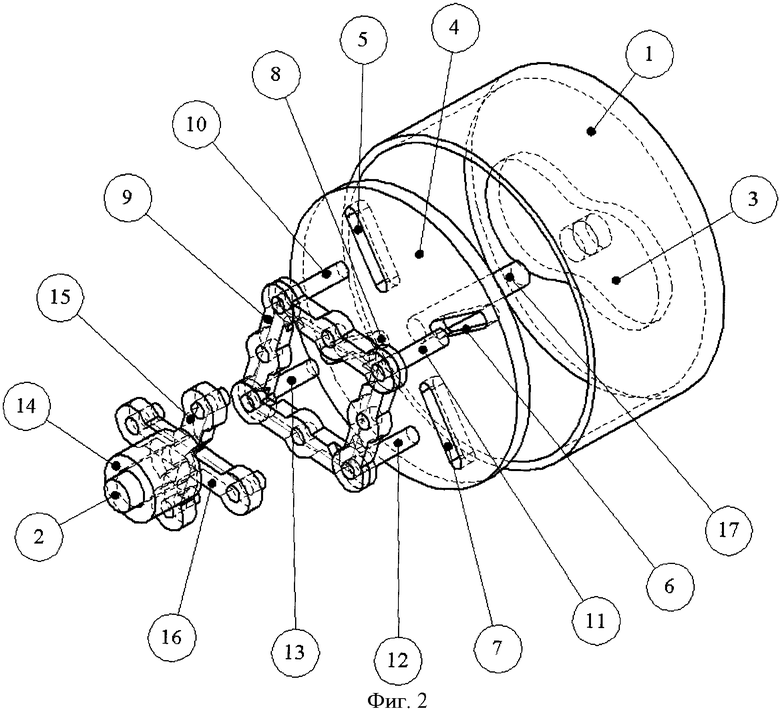
Механизм для преобразования движения, содержащий корпус, основной ведущий вал, кулачок, установленный на корпусе соосно ведущему валу, диск с направляющими, ромбический шарнирный четырехзвенник с пальцами, взаимодействующими с кулачком и направляющими, установленный соосно в основном ведущем валу дополнительный ведущий вал, рычаги и ведомый вал, ведущие валы шарнирно соединены рычагами с серединами противоположных сторон шарнирного четырехзвенника, пальцы расположены в вершинах шарнирного четырехзвенника, а диск установлен с возможностью вращения и механически связан с ведомым валом, профиль кулачка описывается зависимостью полярного радиуса от полярного угла и длины стороны шарнирного четырехзвенника, отличающийся тем, что направляющие расположены симметрично вдоль взаимно перпендикулярных осей симметрии на плоскости диска, а профиль кулачка представляет эквидистанту, отстоящую на величину радиуса пальца внутрь от замкнутой кривой, описываемой следующей формулой:

где ρ(α) - полярный радиус;
α=0…2π - полярный угол;
L - длина стороны ромбического четырехзвенника;
ψmin - минимальный угол между сторонами ромбического четырехзвенника;
π - число Пи.
| Механизм для преобразования движения | 1984 |
|
SU1249247A2 |
| Механизм для преобразования движения | 1984 |
|
SU1191658A1 |
| Механизм для преобразования движения | 1978 |
|
SU724850A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ РАВНОМЕРНОГО ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В НЕРАВНОМЕРНОЕ ВРАЩАТЕЛЬНОЕ | 1989 |
|
RU2022183C1 |
| JP 57157856 A, 29.09.1982 | |||
| DE 19620604 C1, 24.07.1997. | |||

