Изобретение относится к системам управления и может быть использовано при разработке систем управления подвижными объектами, обеспечивающими их перемещение вдоль заданной траектории с заданной траекторией скоростью, или в заданную точку вдоль заданной траектории без предъявления требований к траекторией скорости, или в заданную точку с нулевой конечной скоростью.
Известно устройство траекторного управления [П.Д. Крутько. Управление исполнительными системами роботов. - М.: «Наука», главная редакция физ.-мат. литературы, 1977, 336 с. - с.308-313], содержащее планировщик траекторий, блок решения обратной задачи кинематики, блок аппроксимации, блок интерполяции, блок регуляторов, блок датчиков информации, вычислительные блоки, перемножители и сумматоры. Это устройство позволяет обеспечить асимптотическую устойчивость объекта управления при отработке планируемых траекторий.
Признаками этого аналога, общими с заявляемым устройством, являются планировщик траекторий, блок датчиков информации, вычислители, перемножители и сумматоры.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, является низкая точность отработки траекторий. Она обусловлена тем обстоятельством, что процедура локальной аппроксимации сложных траекторий вносит существенные погрешности в планирование и, следовательно, в отработку этих траекторий и не позволяет стабилизировать заданное значение траекторией скорости.
Более точным и более близким к предлагаемому является устройство управления подвижным объектом, защищенное патентом РФ №2393522, кл. G05D 1/00, 2009 г. Это устройство содержит планировщик траектории, первый, второй и третий вычислители матричных коэффициентов, вычислитель сигнала управления, первый и второй блоки транспонирования матриц, блок датчиков информации, блок сенсорного обеспечения, блок формирования матрицы коэффициентов управления, блок формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке внешних координат, блок формирования вектора внешних скоростей и входящие в состав объекта управления исполнительное устройство и механическую систему.
Признаками этого устройства, совпадающего с существенными признаками заявляемого устройства, являются все перечисленные элементы.
Причиной, препятствующей достижению в этом аналоге технического результата, обеспечиваемого изобретением, являются ограниченные функциональные возможности устройства. Дело в том, что в этом устройстве движение управляемого объекта ограничивается маршрутами, не содержащими препятствий, либо содержащими только неподвижные и заранее известные препятствия. Это обусловлено тем, что устройство требует предварительного картографирования области функционирования подвижного объекта и расчета такой траектории движения управляемого объекта в заданную точку пространства, которая обеспечивала бы обход препятствия и достижение управляемым объектом заданной точки позиционирования.
Наиболее близким по технической сущности к заявляемому (прототипом) является устройство управления подвижным объектом, защищенный патентом РФ №2450308, кл. G05D 1/00, G05B 19/19, 2008 г. Это устройство содержит все элементы, входящие в состав устройства, защищенного патентом РФ №2393522. Кроме того, в его состав дополнительно входят электронный переключатель, инвертор знака определения матрицы и пороговое устройство.
При этом все перечисленные элементы прототипа, кроме электронного переключателя и инвертора знака определения матрицы, входят и в состав заявляемого устройства.
В устройстве-прототипе постоянно измеряется расстояние г между управляемым объектом и ближайшим препятствием на пути его движения и при выполнении условия 

При этом объект управления переходит в режим неустойчивого по расстоянию до препятствия движения до выполнения условия 
Причиной, препятствующей достижению в устройстве-прототипе технического результата, обеспечиваемого заявляемым устройством, является погрешность реализации заданной траектории объекта управления в случае неожиданного возникшего препятствия на пути его следования. Дело в том, что в этом случае в устройстве-прототипе препятствие в принципе хотя и преодолевается, однако при этом объект управления, по сути, сталкивается с препятствием, затем он вновь возвращается на дальность, превышающую величину 
Задачей, на решение которой направлено создание изобретения, является уменьшение отклонения фактической траектории объекта управления от заданной, а значит, и сокращение затрат времени на реализацию заданной траектории.
Технический результат достигается тем, что в известное устройство управления подвижным объектом, защищенное патентом РФ №2450308, дополнительно введены измеритель диапазона изменения угла визирования препятствия, блок расчета поправки сигнала управления и сумматор, при этом шестой выход планировщика траекторий соединен с седьмым входом третьего вычислителя матричного коэффициента и четвертыми входами первого и второго вычислителей матричного коэффициента, первый и второй выходы измерителя диапазона изменения угла визирования препятствия соединены соответственно с первым и вторым информационными входами блока расчета поправки сигнала управления, второй выход блока сенсорного обеспечения соединен с третьим информационным входом блока расчета поправки сигнала управления, выход порогового устройства соединен с управляющим входом блока расчета поправки сигнала управления, первый и второй входы сумматора соединены соответственно с выходом вычислителя сигнала управления и выходом блока расчета поправки сигнала управления, а выход - с управляющим входом исполнительного устройства управляемого объекта.
Для достижения технического результата в известное устройство управления подвижным объектом, содержащее планировщик траектории, первый, второй и третий вычислители матричных коэффициентов, вычислитель сигнала управления, первый и второй блоки транспонирования матриц, блок формирования вектора нелинейных элементов, блок формирования вектора нелинейных элементов, блок формирования матрицы коэффициентов управления, блок-датчиков информации, блок сенсорного обеспечения, блок формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке внутренних координат, блок формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке, внешних координат, блок формирования вектора внешних скоростей, пороговое устройство, исполнительное устройство и механическую систему управляемого объекта, в котором первый, второй, третий и четвертый выходы планировщика траектории соединены соответственно с первым, вторым, третьим и четвертым входами третьего вычислителя матричных коэффициентов, пятый выход планировщика траектории соединен с третьими входами первого и второго вычислителей матричных коэффициентов, первый вход второго вычислителя матричного коэффициента соединен со вторым выходом планировщика траектории, второй вход первого вычислителя матричного коэффициента соединен с шестым входом второго вычислителя матричного коэффициента, вход первого блока транспонирования матриц соединен с пятым входом третьего вычислителя матричного коэффициента, а выход - с его шестым входом и пятым входом второго вычислителя матричного коэффициента, седьмой вход третьего вычислителя матричного коэффициента соединен с четвертыми входами первого и второго вычислителей матричных коэффициентов, первый, второй и третий входы вычислителя сигнала управления соединены соответственно с выходом первого, первым выходом второго и выходом третьего вычислителей матричных коэффициентов, четвертый и пятый входы - с выходами соответственно блока формирования вектора нелинейных элементов и блока формирования матрицы коэффициентов управления, первый и пятый входы первого вычислителя матричного коэффициента соединены соответственно со вторым и третьим выходами второго вычислителя матричного коэффициента, вход блока датчиков информации соединен с выходом исполнительного устройства управляемого объекта, механическая система управляемого объекта соединена непосредственно со входом блока датчиков информации, а через внешнюю среду - со входом блока сенсорного обеспечения, выход блока датчиков информации соединен с первым входом планировщика траекторий и первыми входами блоков формирования вектора нелинейных элементов и матрицы коэффициентов управления, матриц производных вектор-столбца внешних скоростей и вектора внешних скоростей, первый выход блока сенсорного обеспечения соединен со вторыми входами блоков формирования матриц - производных вектор-столбца внешних скоростей и вектора внешних скоростей, входом первого блока транспонирования матриц и вторым входом планировщика траектории, второй выход блока сенсорного обеспечения соединен со входом второго блока транспонирования матриц, выход которого соединен со вторым входом первого вычислителя матричного коэффициента, дополнительно введены измеритель диапазона изменения угла визирования препятствия и расстояния до него, блок расчета поправки сигнала управления и сумматор, при этом шестой выход планировщика траекторий соединен с седьмым входом третьего вычислителя матричного коэффициента и четвертыми входами первого и второго вычислителей матричного коэффициента, первый и второй выходы измерителя диапазона изменения угла визирования препятствия и расстояния до него соединены соответственно с первым и вторым информационными входами блока расчета поправки сигнала управления, второй выход блока формирования вектора внешних скоростей соединен с третьим информационным входом блока расчета поправки сигнала управления, выход порогового устройства соединен с управляющим входом блока расчета поправки сигнала управления, первый и второй входы сумматора соединены соответственно с выходом вычислителя сигнала управления и выходом блока расчета поправки сигнала управления, а выход - с управляющим входом исполнительного устройства управляемого объекта.
Исследования заявленного технического решения по патентной и научно-технической литературе показали, что совокупность вновь введенных измерителя диапазона изменения угла визирования препятствия, блока расчета поправки сигнала управления, сумматора и их связей в совокупности с остальными элементами и связями устройства-прототипа не поддается самостоятельной классификации. В то же время она не следует явным образом из уровня техники. Поэтому предлагаемое устройство следует считать удовлетворяющим критерию "новизна" и имеющим изобретательский уровень.
Сущность изобретения поясняется чертежом, на котором приведены:
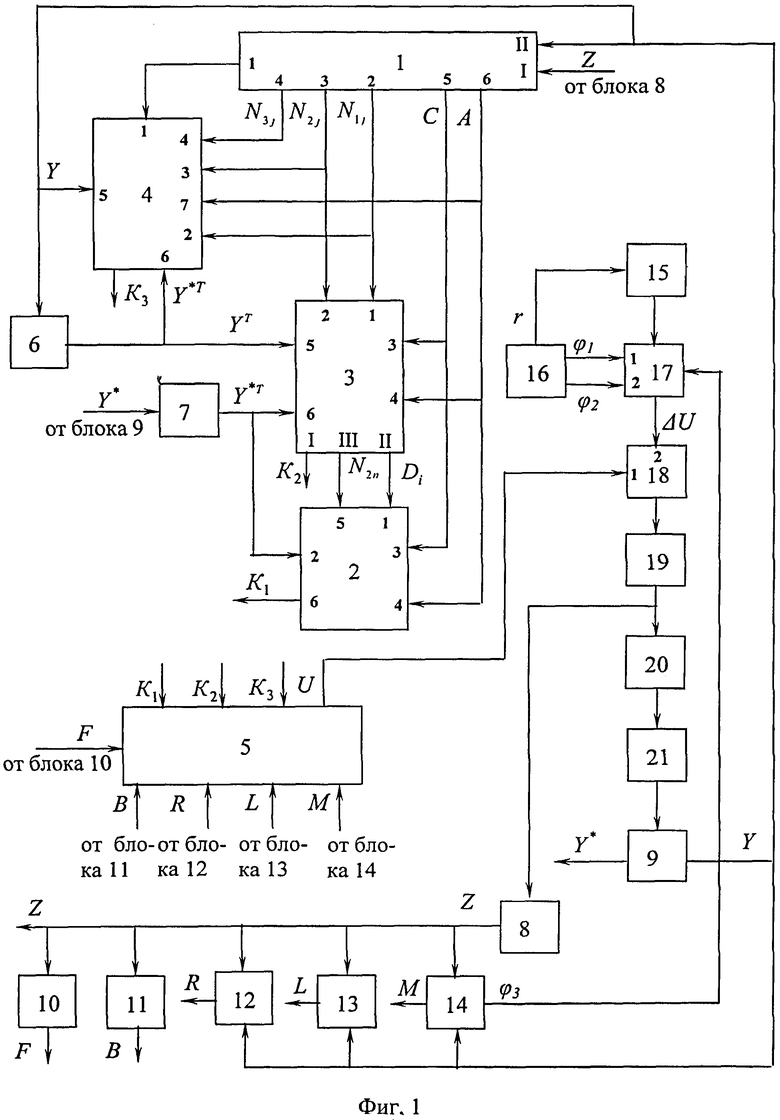
- на фиг.1 - структурная схема предлагаемого устройства в совокупности с входящими в состав объекта управления исполнительным устройством и механической системой;
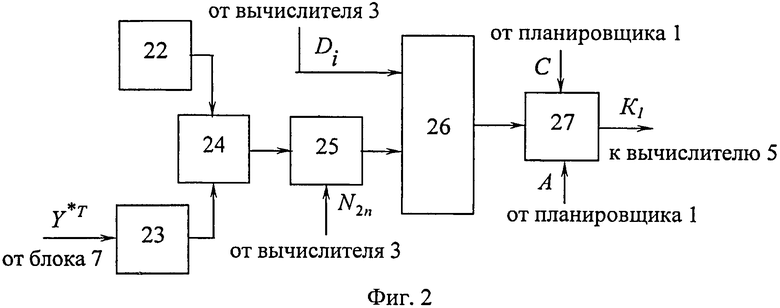
- на фиг.2 - структурная схема первого вычислителя матричного коэффициента;
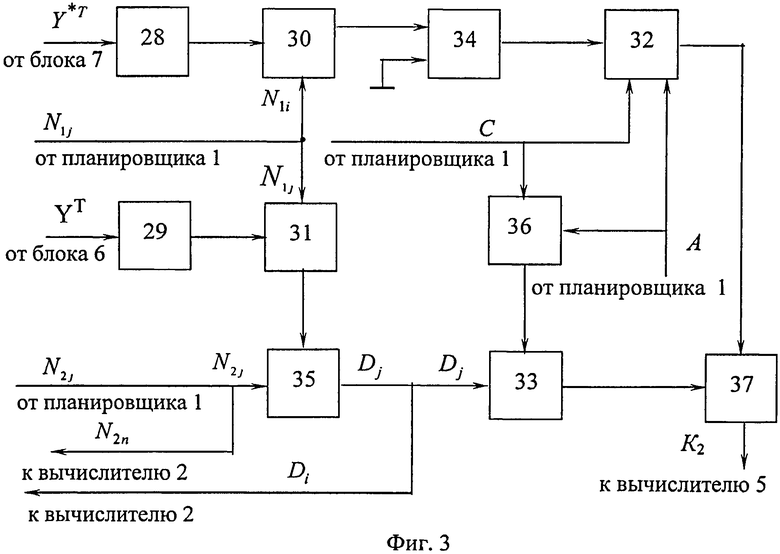
- на фиг.3 - структурная схема второго вычислителя матричного коэффициента;
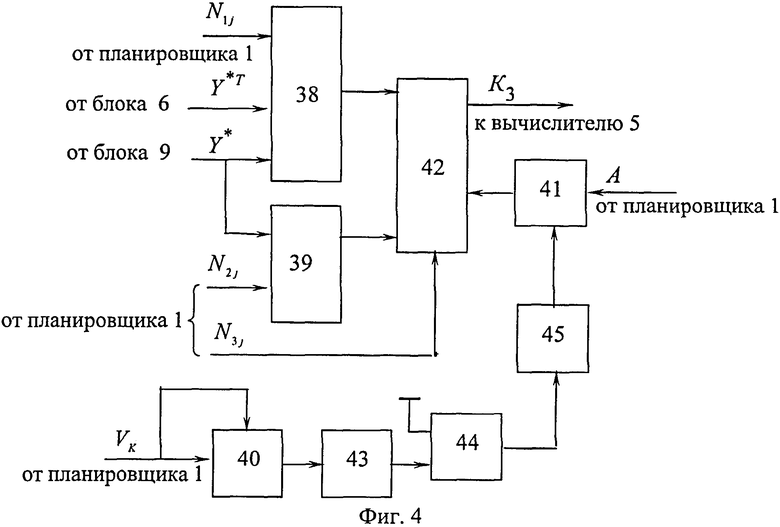
- на фиг.4 - структурная схема третьего вычислителя матричного коэффициента;
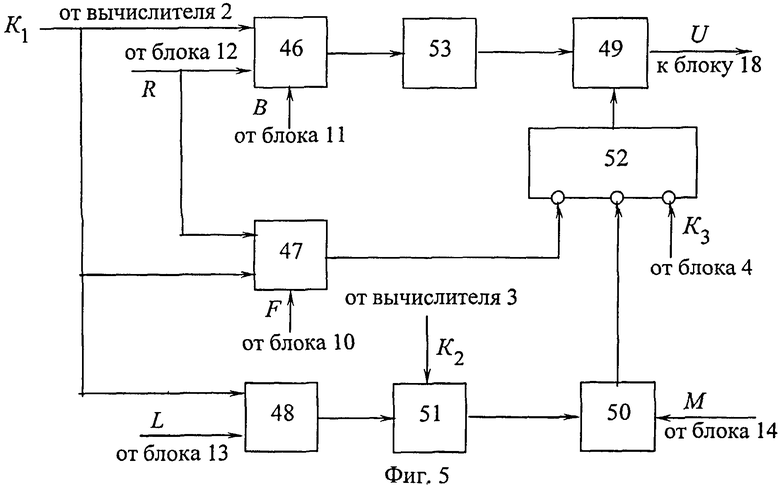
- на фиг.5 - структурная схема вычислителя сигнала управления.
Устройство управления подвижным объектом содержит планировщик 1 траектории, первый 2, второй 3 и третий 4 вычислители матричных коэффициентов, вычислитель 5 сигнала управления, первый 6 и второй 7 блоки транспонирования матриц, блок 8 датчиков информации, блок 9 сенсорного обеспечения, блок 10 формирования вектора нелинейных элементов, блок 11 формирования матрицы коэффициентов управления, блок 12 формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке внутренних координат, блок 13 формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке внешних координат, блок 14 формирования вектора внешних скоростей, пороговое устройство 15, измеритель 16 диапазона изменения угла визирования препятствия и расстояния до него, блок 17 расчета поправки сигнала управления, сумматор 18, исполнительное устройство 19 и механическую систему 20.
Первый, второй, третий и четвертый выходы планировщика 1 соединены соответственно с первым, вторым, третьим и четвертым входами вычислителя 4. Пятый выход планировщика 1 соединен с третьими входами вычислителей 2 и 3. Первый и второй входы вычислителя 3 соединены соответственно со вторым и третьим выходами планировщика 1, первый вход которого соединен с выходом блока 8 и первыми входами блоков 10, 11, 12, 13 и 14, а второй - с первым выходом блока 9, входом блока 6, вторыми входами блоков 12, 13 и 14 и пятым входом вычислителя 4. Выход блока 6 соединен с шестым входом вычислителя 4 и пятым входом вычислителя 3. Вход блока 7 соединен со вторым выходом блока 9, а выход - с шестым входом вычислителя 3 и вторым входом вычислителя 2, первый и пятый входы которого соединены соответственно со вторым и третьим выходами вычислителя 3.
Вход порогового устройства 15 соединен с третьим выходом измерителя 16.
Первый и второй выходы измерителя 16 соединены соответственно с первым и вторым сигнальными входами блока 17, третий сигнальный вход которого соединен с первым выходом блока 9, а управляющий вход - с выходом порогового устройства 15.
Первый вход сумматора 18 соединен с выходом вычислителя 5 сигнала управления, второй - с выходом блока 17, а выход - со входом входящего в состав управляемого объекта исполнительного устройства 19. Выход которого соединен со входом блока 8 и входом входящей в состав управляемого объекта механической системы 20, которая через внешнюю среду 21 соединена со входом блока 9.
Выход вычислителя 2, второй выход вычислителя 3 и выход вычислителя 4 соединены соответственно с первым, вторым и третьим входами вычислителя 5, четвертый, пятый, шестой, седьмой и восьмой входы которого соединены с выходами блоков 10, 11, 12, 13 и 14 соответственно.
Вычислитель 2 содержит регистр 22, блок 23 умножения на два, перемножитель 24, сумматор 25, регистр 26 и перемножитель 27. Выход регистра 22 соединен с первым входом перемножителя 24, второй вход которого соединен с выходом блока 23, соединенного своим входом со вторым входом вычислителя 2. Первый вход сумматора 25 соединен с выходом перемножителя 24, второй вход - с пятым входом вычислителя 2, а выход - со вторым входом регистра 26, первый вход которого соединен с первым входом вычислителя 2, а выход - с первым входом перемножителя 27. Второй и третий входы перемножителя 27 соединены соответственно с третьим и четвертым входами вычислителя 2, а выход - с его выходом.
Вычислитель 3 содержит блоки 28 и 29 умножения на два, перемножители 30, 31, 32 и 33, регистр 34 и сумматоры 35, 36 и 37. Первый вход вычислителя 3 соединен с первыми входами перемножителей 30 и 31, вторые входы которых соединены с выходами блоков 28 и 29 соответственно, соединенных своими входами с шестым и пятым входами вычислителя 3 соответственно. Первый вход регистра 34 соединен с выходом перемножителя 30, второй заземлен, а выход соединен с третьим входом перемножителя 32, первый вход которого соединен с первым входом сумматора 36 и четвертым входом вычислителя 3, а выход - со вторым входом сумматора 37.
Первый вход сумматора 35 соединен, со вторым входом и третьим выходом вычислителя 3, второй - с выходом перемножителя 31, а выход - со вторым выходом вычислителя 3 и первым входом перемножителя 33, второй вход которого соединен с выходом сумматора 36. Первый вход сумматора 37 соединен с выходом перемножителя 33, а выход - с первым выходом вычислителя 3.
Вычислитель 4 содержит перемножители 38, 39, 40 и 41, сумматор 42, инвертор 43, регистр 44 и блок 45 транспонирования матриц. Первый, второй и третий входы перемножителя 38 соединены соответственно со вторым, пятым и шестым входами вычислителя 4, а выход - с первым входом сумматора 42. Первый вход перемножителя 39 соединен с пятым входом вычислителя 4, второй - с третьим входом вычислителя 4, а выход - со вторым входом сумматора 42. Входы перемножителя 40 соединены с первым входом вычислителя 4, а выход - со входом инвертора 43. Выход инвертора 43 соединен со вторым входом регистра 44, первый вход которого заземлен, а выход соединен со входом блока 45 транспонирования матриц. Первый и второй входы перемножителя 41 соединены соответственно с выходом блока 45 и седьмым входом вычислителя 4, а выход - с четвертым входом сумматора 42, третий вход которого соединен с четвертым входом вычислителя 4, а выход является выходом вычислителя 4.
Вычислитель 5 содержит перемножители 46, 47, 48, 49 и 50, сумматоры 51 и 52 и блок 53 обращения матриц. Первый вход вычислителя соединен с первыми входами перемножителей 46, 47 и 48. Второй вход перемножителя 46 соединен со вторым входом перемножителя 47 и шестым входом вычислителя 5, третий вход - с пятым входом вычислителя 5, а выход - со входом блока 53. Третий вход перемножителя 47 соединен с четвертым входом вычислителя 5, а выход - с первым инверсным входом сумматора 52. Второй вход перемножителя 48 соединен с седьмым входом вычислителя 5, а выход - с первым входом сумматора 51, второй вход которого соединен со вторым входом вычислителя 5, а выход - с первым входом перемножителя 50. Второй вход перемножителя 50 соединен с восьмым входом вычислителя 5, а выход - со вторым инверсным входом сумматора 52, третий инверсный вход которого соединен с третьим входом вычислителя 5. Первый вход перемножителя 49 соединен с выходом блока 53, второй - с выходом сумматора 52, а выход является выходом вычислителя 5.
Функционирование предлагаемого устройства управления заключается в следующем.
Сформированный вычислителем. 5 сигнал управления С/через сумматор 18 поступает на управляющий вход устройства 19.
Сначала рассмотрим случай. Когда на второй вход сумматора 18 с выхода блока 17 поступает нулевой сигнал поправки.
Порядок формирования управляющего сигнала U также будет изложен ниже.
Устройство 19 и подключенные к его выходу механическая система 20 и блок 8 датчиков отрабатывают этот сигнал. Блок 8 осуществляет измерение внутренних координат управляемого объекта (углов поворота руля, ведущих колес и т.д.). На его выходах формируется вектор Z внутренних координат размерностью "n", который поступает на первый вход планировщика 1 траекторий и входы блоков 10, 11, 12, 13 и 14. С выхода механической системы 20 через внешнюю среду 21 результаты отработки поступают на вход блока 9 сенсорного обеспечения. Этот блок осуществляет измерение внешних координат управляемого объекта - координат его центра тяжести и ориентации корпуса. На первом выходе блока 9 формируется вектор Y внешних координат управляемого объекта размерностью "m". Размерность m удовлетворяет условию 


Планировщик 1, представляющий собой управляющую вычислительную машину, под действием управляющих сигналов Z и Y формирует на своих выходах следующие управляющие сигналы:
- траекторную (контурную) скорость VK объекта управления;
- матрицы N1j, N2j и N3j квадратичных форм от внешних координат, где 
- диагональные матрицы C и A постоянных коэффициентов размерностью n×n.
Сигнал VK формируется на первом выходе планировщика 1 и поступает оттуда на первый вход вычислителя 4. Сигнал N1j формируется на втором выходе планировщика 1 и поступает оттуда на первый вход вычислителя 3 и на второй вход вычислителя 4. Сигнал N2j формируется на третьем выходе планировщика 1 и поступает оттуда на второй вход вычислителя 3 и третий вход вычислителя 4. Сигнал N3j формируется на четвертом выходе планировщика 1 и поступает оттуда на четвертый вход вычислителя 4. Матрица C формируется на пятом выходе планировщика 1 и поступает оттуда на третьи входы вычислителей 2 и 3. Матрица A формируется на шестом выходе планировщика 1 и поступает оттуда на четвертые входы вычислителей 2 и 3 и седьмой вход вычислителя 4.
В блоке 10 формируется вектор F нелинейного преобразования внутренних координат Z. Этот вектор - нелинейная функция - своя для каждого конкретного объекта управления. С выхода блока 10 вектор F поступает на четвертый вход вычислителя 5.
Аналогично в блоке 11 формируется матрица B нелинейного преобразования внутренних координат Z. Она представляет собой матрицу коэффициентов управления и так же, как и вектор F, является специфичной для каждого конкретного объекта управления. С выхода блока 11 матрица B поступает на пятый вход вычислителя 5.
В блоке 12 формируется матрица R - производная вектор-столбца внешних скоростей по вектор-строке внутренних координат. Она формируется как нелинейная функция не только внутренних Z, а и внешних Y координат и также является специфичной для каждого конкретного объекта управления. С выхода блока 12 матрица R поступает на шестой вход вычислителя 5.
В блоке 13 аналогично формируется матрица L - производная вектор-столбца внешних скоростей по вектор-строке внешних координат. Она так же, как и матрица R, формируется как нелинейная функция координат Z и Y и является специфичной для каждого конкретного объекта управления. С выхода блока 13 матрица L поступает на седьмой вход вычислителя 5.
В блоке 14 формируется вектор M внешних скоростей, также являющийся нелинейной функцией координат Z и У, специфичной для каждого объекта управления. С выхода блока 14 вектор M поступает на восьмой вход вычислителя 5. Кроме того, на выходе блока 15 формируется сигнал φ3, соответствующий углу - наклона вектору скорости объекта управления.
Блок 6 осуществляет транспонирование поступившего на его вход вектора Y внешних координат. Результат YT транспонирования с выхода блока 6 поступает на пятый вход вычислителя 3. Часть элементов этого вектора Y*, представляющая собой координаты центра тяжести управляемого объекта, поступает кроме того на шестой вход вычислителя 4.
Аналогично блок 7 осуществляет транспонирование поступившего на его вход вектора 

Пороговое устройство 15 определяет выполнение условия:

где 
Рассмотрим сначала работу устройства управления в случае, если 
В вычислителе 3 рассчитывается вспомогательная матрица Dj и формируется второй матричный коэффициент K2.
Матрица Dj рассчитывается по формуле:

Расчет матрицы Dj осуществляется с помощью блока 29 умножения на два, перемножителя 31 и сумматора 35.
Матрица 


В блоке 29 поступивший на его вход вектор YT удваивается, и результат 


Второй матричный коэффициент K2 формируется с помощью блока 28 умножения на два, перемножителей 30, 32 и 33, регистра 34 и сумматоров 36 и 37.
Вектор 
В блоке 28 поступивший на его вход вектор 

В сумматоре 36 поступившие на его входы матрицы A и C суммируются, и результат 
В перемножителе 32 поступившие на его вход матрицы перемножаются, и результат 
В сумматоре 37 поступившие на его входы матрицы суммируются, и на его выходе формируется результат суммирования - матричный коэффициент K2 в соответствии с уравнением:

Этот результат поступает на первый выход вычислителя.
Таким образом, в вычислителе 3 формируются:
- на первом выходе второй матричный коэффициент К2 в соответствии с уравнением (3);
- на втором выходе вспомогательная матрица Di в соответствии с уравнением (2);
- на третьем выходе матрица N2n квадратичной формы от внешних координат.
Матричный коэффициент K2 поступает с первого выхода вычислителя 3 на второй вход вычислителя 5, матрица Di поступает со второго выхода вычислителя 3 на первый вход вычислителя 2, а матрица 
В вычислителе 2 формируется первый матричный коэффициент K1.
Вектор 




С выхода вычислителя 2 матричный коэффициент K1 поступает на первый вход вычислителя 5.
В вычислителе 4 формируется третий матричный коэффициент K3.
На первый вход перемножителя 38 поступает матрица 








С выхода вычислителя 4 матричный коэффициент K3 поступает на третий вход вычислителя 5.
В вычислителе 5 формируется вектор управления U.
На первые входы перемножителей 46, 47 и 48 с первого входа вычислителя поступает первый матричный коэффициент K1, на вторые входы перемножителей 46 и 47 поступает матрица R с шестого входа вычислителя, на второй вход перемножителя 48 - матрица L с седьмого входа вычислителя, а на третьи входы перемножителей 46 и 47 - матрица B и вектор F с пятого и четвертого входов вычислителя соответственно. На выходе перемножителя 46 формируется матрица 






С выхода вычислителя управление (сигнал управления) U поступает на управляющий вход исполнительного устройства 19.
Таким образом, при выполнении условия 
- измерение внутренних координат Z управляемого объекта;
- измерение его внешние координат Y и их производных 
- формирование матриц 

- формирование вектора M внешних скоростей, вектора F и матрицы B нелинейного преобразования внутренних координат, матриц - производных R и L вектор-столбца внешних скоростей;
- формирование матричных коэффициентов K1, K2 и K3 в соответствии с уравнениями (3), (4) и (5) соответственно;
- формирование вектора управления U в соответствии с уравнением (6). Описанный алгоритм полностью соответствует алгоритму управления, приведенному в работе [В.Х. Пшихопов "Аналитический синтез синергетических регуляторов для позиционно-траекторных систем управления мобильными роботами". Материалы XI научно-технической конференции "Экстремальная робототехника". Под научной редакцией проф. Е.И. Юревича. СПб., издательство СПбГТУ, 2000]. Он соответствует движению мобильного (подвижного) объекта вдоль заданной траектории.
В случае, если на маршруте следования управляемого объекта вблизи этого объекта появляется одно или несколько препятствий, то начинает выполняться условие (1), пороговое устройство 15 формирует на своем выходе и на управляющем входе блока 17 сигнал, под действием которого блок 17 формирует сигнал 
Сигнал




где 
В результате «отработки» сигнала поправки начинает выполняться условие 

Таким образом, предлагаемое устройство управления позволяет в отличие от прототипа полностью исключить столкновение с незапланированным препятствием и существенно уменьшить отклонения фактической траектории объекта управления от заданной, а следовательно, и сокращение затрат времени на ее реализацию.
Предлагаемое устройство достаточно легко реализуемо.
В качестве измерителя диапазона углов визирования ближайшего препятствия в горизонтальной и вертикальной плоскостях и расстояния r до него может служить координатор активной радиолокационной доплеровской головки самонаведения, защищенной патентом РФ №2313054, кл. F41G 7/22, 2006 г., реализующий высокое разрешение целей и точность определения их дальности и угловых координат.
В качестве остальных элементов для реализации предлагаемого устройства могут служить те же элементы, что и соответствующие элементы устройства-прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2450308C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 2009 |
|
RU2393522C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2013 |
|
RU2538316C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2538315C1 |
| УСТРОЙСТВО КОНТУРНОГО УПРАВЛЕНИЯ МАНИПУЛЯЦИОННЫМ РОБОТОМ | 1998 |
|
RU2146606C1 |
| УСТРОЙСТВО ТРАЕКТОРНОГО, ОПТИМАЛЬНОГО ПО БЫСТРОДЕЙСТВИЮ УПРАВЛЕНИЯ МАНИПУЛЯЦИОННЫМ РОБОТОМ | 2000 |
|
RU2199775C2 |
| СИСТЕМА КОРРЕКЦИИ ТРАЕКТОРИИ ДВИЖЕНИЯ МАНИПУЛЯТОРА | 2011 |
|
RU2462745C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 2013 |
|
RU2582868C2 |
| УСТРОЙСТВО ПОЗИЦИОННО-ТРАЕКТОРНОГО УПРАВЛЕНИЯ МОБИЛЬНЫМ РОБОТОМ | 2001 |
|
RU2185279C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
Изобретение относится к системам управления и может быть использовано при разработке систем управления подвижными объектами, обеспечивающих их перемещение по заданной траектории с заданной скоростью в неопределенных средах. Технический результат - уменьшение отклонения фактической траектории объекта управления от заданной, а значит, и сокращение затрат времени на реализацию заданной траектории. Устройство управления подвижным объектом содержит планировщик траектории, три вычислителя матричных коэффициентов, вычислитель сигнала управления, два блока транспонирования матриц, блок датчиков информации, блок сенсорного обеспечения, блок формирования вектора нелинейных элементов, блок формирования матрицы коэффициентов управления, блок формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке внутренних координат, блок формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке внешних координат, блок формирования вектора внешних скоростей, пороговое устройство, измеритель диапазона изменения угла визирования препятствия и расстояния до него, блок расчета поправки сигнала управления, сумматор, исполнительное устройство и механическую систему. 5 ил.
Устройство управления подвижным объектом, содержащее планировщик траектории, первый, второй и третий вычислители матричных коэффициентов, вычислитель сигнала управления, первый и второй блоки транспонирования матриц, блок формирования вектора нелинейных элементов, блок формирования вектора нелинейных элементов, блок формирования матрицы коэффициентов управления, блок датчиков информации, блок сенсорного обеспечения, блок формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке внутренних координат, блок формирования матрицы - производной вектор-столбца внешних скоростей по вектор-строке внешних координат, блок формирования вектора внешних скоростей, пороговое устройство, исполнительное устройство и механическую систему управляемого объекта, в котором первый, второй, третий и четвертый выходы планировщика траектории соединены соответственно с первым, вторым, третьим и четвертым входами третьего вычислителя матричных коэффициентов, пятый выход планировщика траектории соединен с третьими входами первого и второго вычислителей матричных коэффициентов, первый вход второго вычислителя матричного коэффициента соединен со вторым выходом планировщика траектории, второй вход первого вычислителя матричного коэффициента соединен с шестым входом второго вычислителя матричного коэффициента, вход первого блока транспонирования матриц соединен с пятым входом третьего вычислителя матричного коэффициента, а выход - с его шестым входом и пятым входом второго вычислителя матричного коэффициента, седьмой вход третьего вычислителя матричного коэффициента соединен с четвертыми входами первого и второго вычислителей матричных коэффициентов, первый, второй и третий входы вычислителя сигнала управления соединены соответственно с выходом первого, первым выходом второго и выходом третьего вычислителей матричных коэффициентов, четвертый и пятый входы - с выходами соответственно блока формирования вектора нелинейных элементов и блока формирования матрицы коэффициентов управления, первый и пятый входы первого вычислителя матричного коэффициента соединены соответственно со вторым и третьим выходами второго вычислителя матричного коэффициента, вход блока датчиков информации соединен с выходом исполнительного устройства управляемого объекта, механическая система управляемого объекта соединена непосредственно со входом блока датчиков информации, а через внешнюю среду - со входом блока сенсорного обеспечения, выход блока датчиков информации соединен с первым входом планировщика траекторий и первыми входами блоков формирования вектора нелинейных элементов и матрицы коэффициентов управления, матриц производных вектор-столбца внешних скоростей и вектора внешних скоростей, первый выход блока сенсорного обеспечения соединен со вторыми входами блоков формирования матриц - производных вектор-столбца внешних скоростей и вектора внешних скоростей, входом первого блока транспонирования матриц и вторым входом планировщика траектории, второй выход блока сенсорного обеспечения соединен со входом второго блока транспонирования матриц, выход которого соединен со вторым входом первого вычислителя матричного коэффициента, вычислитель первого матричного коэффициента содержит два регистра, два перемножителя, блок умножения на два и сумматор, первый вход первого регистра соединен с первым входом вычислителя, второй - с выходом сумматора, а выход - с первым входом второго перемножителя, вход блока умножения на два соединен со вторым входом вычислителя, а выход - со вторым входом первого перемножителя, соединенного своим первым входом с выходом второго регистра, а выходом - с первым входом сумматора, второй вход которого является пятым входом вычислителя, второй и третий входы второго перемножителя соединены соответственно с третьим и четвертым входами вычислителя, а выход является выходом вычислителя, вычислитель второго матричного коэффициента содержит два блока умножения на два, регистр, четыре перемножителя и три сумматора, первые входы первого и второго перемножителеи соединены с первым входом вычислителя, а вторые - с выходами соответственно первого и второго блоков умножения на два, соединенных своими входами соответственно с шестым и пятым входами вычислителя, первый вход регистра соединен с выходом первого перемножителя, второй заземлен, а выход соединен с третьим входом третьего перемножителя, первый вход которого соединен с первым входом первого сумматора и четвертым входом вычислителя, второй - со вторым входом первого сумматора и третьим входом вычислителя, а выход - со вторым входом третьего сумматора, первый вход второго сумматора соединен со вторым входом и третьим выходом вычислителя, второй - с выходом второго перемножителя, а выход - со вторым выходом вычислителя и первым входом четвертого перемножителя, второй вход четвертого перемножителя соединен с выходом первого сумматора, а выход - с первым входом третьего сумматора, выход которого является первым выходом вычислителя, вычислитель третьего матричного коэффициента содержит четыре перемножителя, сумматор, инвертор, регистр и блок транспонирования матриц, первый и второй входы первого перемножителя соединены с первым входом вычислителя, а выход - со входом инвертора, соединенного своим выходом со вторым входом регистра, первый вход которого заземлен, первый, второй и третий входы второго перемножителя соединены соответственно со вторым, пятым и шестым входами вычислителя, а выход - с первым входом сумматора, первый вход третьего перемножителя соединен с пятым входом вычислителя, второй - с его третьим входом, а выход - со вторым входом сумматора, третий вход которого соединен с четвертым входом вычислителя, вход блока транспонирования матриц соединен с выходом регистра, а выход - с первым входом четвертого перемножителя, второй вход которого соединен с седьмым входом вычислителя, четвертый вход сумматора соединен с выходом четвертого перемножителя, а выход является выходом вычислителя, вычислитель сигнала управления содержит пять перемножителей, два сумматора и блок обращения матриц, первые входы первого, второго и третьего перемножителеи соединены с первым входом вычислителя, второй вход первого перемножителя соединен со вторым входом второго и шестым входом вычислителя, третий вход - с пятым входом вычислителя, а выход - со входом блока обращения матриц, третий вход второго перемножителя соединен с четвертым входом вычислителя, а выход - с первым инверсным входом второго сумматора, второй вход третьего перемножителя соединен с седьмым входом вычислителя, а выход - с первым входом первого сумматора, второй вход которого соединен со вторым входом вычислителя, а выход - с первым входом пятого перемножителя, второй вход пятого перемножителя соединен с восьмым входом вычислителя, а выход - со вторым инверсным входом второго сумматора, третий инверсный вход которого соединен с третьим входом вычислителя, первый вход четвертого перемножителя соединен с выходом блока обращения матриц, второй - с выходом второго сумматора, а выход является выходом вычислителя, отличающееся тем, что в него дополнительно введены измеритель диапазона изменения угла визирования препятствия и расстояния до него, блок расчета поправки сигнала управления и сумматор, при этом шестой выход планировщика траекторий соединен с седьмым входом третьего вычислителя матричного коэффициента и четвертыми входами первого и второго вычислителей матричного коэффициента, первый и второй выходы измерителя диапазона изменения угла визирования препятствия и расстояния до него соединены соответственно с первым и вторым информационными входами блока расчета поправки сигнала управления, второй выход блока формирования внешних скоростей соединен с третьим информационным входом блока расчета поправки сигнала управления, выход порогового устройства соединен с управляющим входом блока расчета поправки сигнала управления, первый и второй входы сумматора соединены соответственно с выходом вычислителя сигнала управления и выходом блока расчета поправки сигнала управления, а выход - с управляющим входом исполнительного устройства управляемого объекта.
| Приспособление к каретке ткацкого станка для управления ее крючками при комбинированном зевообразовании | 1949 |
|
SU88169A1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2450308C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ | 2009 |
|
RU2393522C1 |
| DE 3207698 A1, 08.09.1983 | |||
| US 5530791, 25.06.1996 | |||

