Изобретение относится к области радиолокации, в частности к вторичной обработке радиолокационной информации и предназначено для использования в системах сопровождения подвижных целей.
Известны способ и устройство адаптивной фильтрации параметров траектории маневрирующего объекта на основе байесовского подхода (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, стр. 179-181, пункты 1-10, рис. 4.10). Способ заключается в том, что оценки параметров определяются путем взвешенного усреднения оценок, полученных в результате фильтрации координат при заданном ряде фиксированных значений возмущающего фактора. Каждую из оценок координат при фиксированном значении возмущающего фактора получают с помощью рекуррентного линейного фильтра (фильтра Калмана). Устройство, реализующее описанный способ адаптивной фильтрации, состоит из m+1 (m - количество заданных дискретных значений возмущающего фактора) параллельно включенных фильтров Калмана, каждый из которых настроен на одно из возможных дискретных значений возмущающего фактора (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, стр. 180-181, рис. 4.10). Результирующая оценка фильтруемых параметров получается как взвешенная сумма оценок на выходах этих фильтров.
Недостатками способа и устройства являются сложность реализации, необходимость априорного знания целого ряда параметров, например, дисперсий ошибок измерений (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М: Радио и связь, 1986, стр. 179, п. 4), которые в реальных условиях в общем случае неизвестны и значительно меняются в зависимости от условий работы РЛС, а также различаются для разных типов объектов (например, из-за различий в величине и характере флуктуации эффективной поверхности рассеяния (ЭПР)) и т.п. Предполагаемые параметры маневра и его статистическое описание (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, стр. 176-177), используемые в известных способе и устройстве, как правило, не совпадают с действительными. Таким образом, известные способ и устройство адаптивной фильтрации в реальных условиях работают со значительными ошибками (Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, стр. 182, рис. 4.12, непрерывные кривые).
Известен способ фильтрации параметров траектории объекта и устройство для его реализации (Патент РФ 2408027, опубликован 27.12.2010). В устройстве реализован способ, при котором адаптация параметров фильтра к текущим условиям достигается за счет измерения абсолютных величин отклонений сглаженного значения координаты от ее экстраполированного значения, сглаженного значения скорости изменения координаты от ее экстраполированного значения, сглаженного значения ускорения координаты от ее предыдущего сглаженного значения, а также за счет использования «сигналов ошибок» сглаженных координат скорости и ускорения. При этом ведется фильтрация координат объекта в полярной системе координат.
В таком устройстве недостатки свойственные сопровождению в полярных координатах полностью не устраняются. В полной мере эффективность будет проявляться при сопровождении маневрирующих объектов, генеральный курс которых пересекает точку стояния РЛС. Для целей, летящих с курсовым параметром, по мере приближения эффективность уменьшается за счет «кажущегося ускорения», и в ближней зоне даже при прямолинейном движении качество сопровождения становится ниже, чем у фильтров, сопровождающих цели в прямоугольных координатах. Следует также отметить, что, во-первых, большинство задач в системах управления ПВО решается в прямоугольных координатах и преобразование координат при этом неизбежно, а во-вторых, заявляемое устройство базируется на α-β-фильтре, а не α-β-γ-фильтре.
Известен трехмерный адаптивный α-β фильтр (Патент РФ №2631766, опубликован 26.09.2017). В устройстве применяют компенсатор динамического отставания координат, скорости и экстраполированного положения. При этом трехмерный адаптивный α-β фильтр оценивает вероятность и интенсивность маневра по положению сглаженного вектора обновляющей последовательности относительно порогового эллипсоида в прямоугольной связанной с объектом наблюдения системе координат, в которой центр связан с отметкой от цели, а направление прямоугольных осей связаны с направлением измерений.
В таком устройстве методу выявления маневра по обновляющей последовательности присущ недостаток, заключающийся в том, что чувствительность к выявлению маневра уменьшается при больших дальностях цели, а также отсутствует адаптация параметров по ускорениям в связанной модели в зависимости от интенсивности маневрирования в различных плоскостях, что ведет к снижению точности и устойчивости сопровождения.
Наиболее близким к предлагаемому является способ оценки параметров траектории объекта (Патент РФ №2610831, опубликован 16.02.2017), основанный на измерении координат объекта, преобразовании их в прямоугольные координаты и использовании для оценки параметров траектории объекта фильтра Калмана, при этом устанавливают контролируемый параметр фильтра Калмана и задают его пороговое значение, в текущем времени оценивания умножают корреляционную матрицу ошибок экстраполяции фильтра Калмана на весовой коэффициент с начальным значением, равным единице, накапливают значение контролируемого параметра, сравнивают накопленное значение контролируемого параметра с пороговым значением и если оно больше порогового значения, то формируют признак «Маневр», обнуляют накопленное значение контролируемого параметра, а значение весового коэффициента дискретно увеличивают и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории, при этом, если при наличии признака «Маневр» накопленное значение контролируемого параметра станет меньше порогового значения, то признак «Маневр» снимают, обнуляют накопленное значение контролируемого параметра, а значение весового коэффициента дискретно уменьшают и далее продолжают накопление контролируемого параметра и формирование оценок параметров траектории объекта.
Известный способ заключается в предварительном назначении контролируемого параметра из фазовых координат фильтра Калмана. В качестве такого параметра приняты сигнал модуля ускорения, определяемый оценками вторых производных (ускорений) соответствующих прямоугольных координат объекта или сигнал модуля ошибки оценки прямоугольной координаты по каждой оцениваемой координате объекта или сигнал модуля ошибки оценки прямоугольной координаты по каждой оцениваемой координате объекта. Также устанавливают пороговое значение контролируемого параметра фильтра.
В процессе оценивания накапливают значения установленного контролируемого параметра фильтра. В случае использования контролируемого параметра в виде сигнала модуля ускорения накопление осуществляют запоминанием его текущих значений W[i] на заданном интервале времени оценивания параметров траектории, где i=1, …, k, k - целое число. Длительность интервала накопления Т1нак=kτ0 определяется предполагаемой динамикой сопровождаемого объекта, т.е. временем, в течение которого объект может сменить вид своего движения, например, прямолинейное движение сменить на маневрирование. В случае использования контролируемого параметра в виде сигнала модуля ошибки оценки координаты по каждой оцениваемой координате накопление осуществляют интегрированием его текущих значений на заданном интервале времени оценивания параметров траектории. Превышение накопленного контролируемого параметра его порогового значения означает, что требуемая точность оценки параметров траектории из-за возникающей динамической ошибки фильтра не обеспечивается в силу несоответствия принятых моделей движения объекта и ошибок измерения его координат реальным процессам движения объекта и измерения координат и требуется корректировка параметров оценивающего фильтра. Корректировка весового коэффициента уменьшает коэффициент взвешивания корреляционной матрицы ошибок экстраполяции ΨЭ[n], что приводит к коррекции вычисления матричного коэффициента усиления фильтра K[n], соответственно к сужению полосы пропускания фильтра и уменьшению случайной ошибки оценивания параметров траектории при обеспечении требуемой динамической ошибки оценивания.
Однако необходимость накопления контролируемого параметра, наличие операций интегрирования, а также корректировки параметров оценивающего фильтра существенно усложняют реализацию известного способа и приводят к повышению времени расчета оценок траекторных параметров и вычислительных требований к системам сопровождения подвижных объектов. Также в известном алгоритме при вычислении коэффициентов усиления Bi используются постоянные значения ax, ay, az
ускорений по трем координатам, входящие в формулу расчета корреляционной матрицы ошибок экстраполяции. Основным недостатком является привязка параметров ax, ay, az к осям координат. При изменении направления движения любых объектов изменяются и возможные допустимые СКО по этим координатам, что никак не учитывается при задании модели.
Задачей предлагаемого изобретения является упрощение способа сопровождения подвижных целей.
Технический результат заключается в повышении устойчивости сопровождения и точности оценки параметров траектории сопровождаемой цели в условиях неопределенности динамики его движения.
В изобретении технический результат достигается за счет того, что в способе адаптивного сопровождения радиолокационных целей, заключающемся в преобразовании полученных от РЛС координат цели в прямоугольные координаты, которые используют для оценки параметров траектории цели с помощью фильтра Калмана, включающего последовательные экстраполяцию параметров траектории, формирование сигналов ошибок оценки координат как разностей между соответствующими текущими измеренными и экстраполированными координатами цели, вычисление корреляционных матриц ошибок экстраполяции и ошибок оценивания параметров траектории, при этом сопровождение ведут в связанной с целью скоростной системе координат, вектор состояния которой включает координаты цели х, у, z, скорость - V, курс - K и угол наклона траектории - φ, а при получении по предшествующим наблюдениям очередной оценки скорости цели V(i-1), курса Кi-1 и угла наклона траектории φi-1 в связанной с целью скоростной системе координат рассчитывают корректирующие добавки для параметров фильтра - Δνi, ΔKi, Δφi - необходимые для адаптации параметров ax, ay, az на каждом шаге сопровождения цели, которые используют для учета направления движения целей и связанных с этим направлением различных возможностей по выполнению маневров по различным декартовым координатам при получении следующей оценки параметров траектории сопровождаемой цели.
Технический результат достигается также за счет того, что в устройство адаптивного сопровождения радиолокационных целей, включающее соединенные между собой определенным образом преобразователь координат, вычитатель, матричный усилитель, матричный сумматор, блок экстраполяции параметров траектории, блок наблюдаемой координаты, вычислитель матрицы ошибок экстраполяции параметров траектории, вычислитель матрицы ошибок оценивания параметров траектории, вычислитель матричного коэффициента усиления, дополнительно включены два преобразователя координат и устройство задержки на такт, причем вход одного из преобразователей координат соединен с выходом матричного сумматора, а один выход последовательно соединен с устройством задержки на такт, другим преобразователем координат, вычислителем матрицы ошибок экстраполяции параметров траектории, другой выход соединен с потребителем.
Изобретение поясняется фигурами:
фиг. 1 - функциональная схема устройства сопровождения подвижных целей,
где: 1 - преобразователь координат (ПК);
2 - вычитатель (В);
3 - матричный усилитель (МУ);
4 - матричный сумматор (МС);
5 - блок экстраполяции параметров траектории (Э);
6 - блок наблюдаемой координаты (Н);
7 - вычислитель матрицы ошибок экстраполяции параметров траектории (ОЭ);
8 - вычислитель матрицы ошибок оценивания параметров траектории (ОО);
9 - вычислитель матричного коэффициента усиления (К);
10 - преобразователь координат (ПК);
11 - устройство задержки на такт (ЗТ);
12 - преобразователь координат (ПК);
Vni - корреляционная матрица ошибок измерения координат;
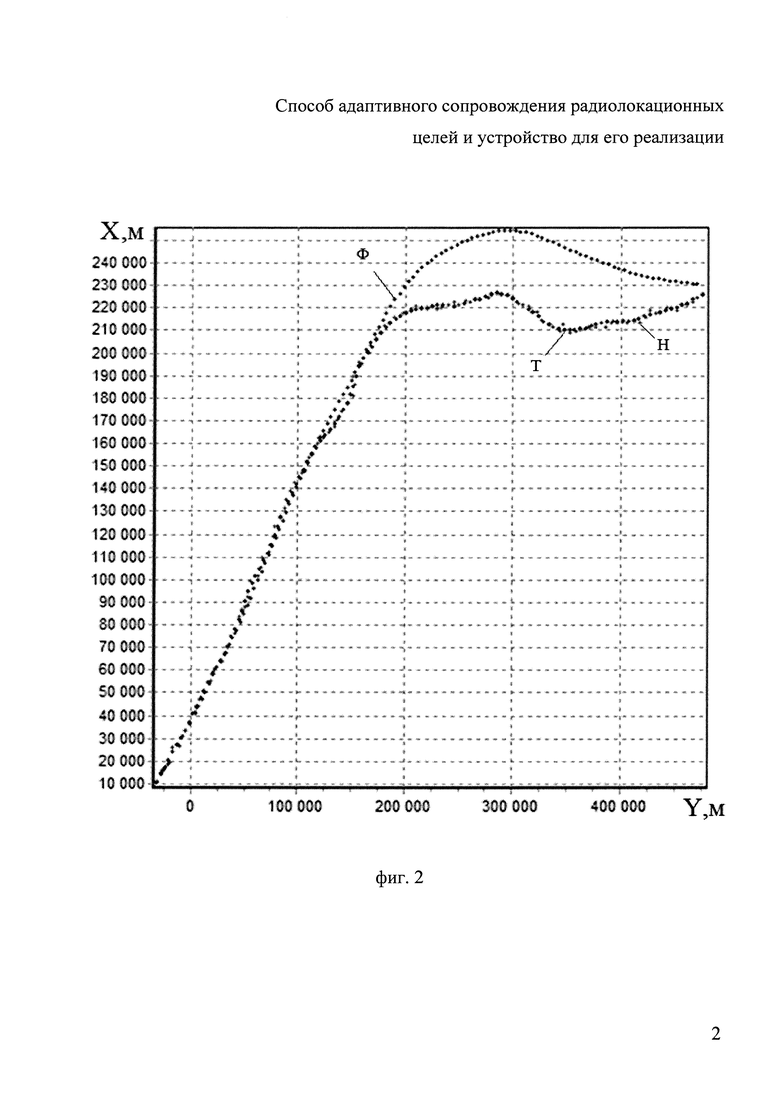
фиг. 2 - результаты работы прототипа,
где: Т - истинная траектория движения;
Н - наблюдения от РЛС;
Ф - траектория, восстановленная по оценкам прототипа;
фиг. 3 - результаты работы изобретения,
где: Т - истинная траектория движения;
Н - наблюдения от РЛС;
Ф - траектория, восстановленная по оценкам изобретения;
фиг. 4 - рассчитанные значения эффективности оценивания координаты X прототипом,
где: О - отклонения оценок от истинных значений;
И - отклонения измерений от истинных значений;
фиг. 5 - рассчитанные значения эффективности оценивания координаты X изобретением,
где: О - отклонения оценок от истинных значений;
И - отклонения измерений от истинных значений;
фиг. 6 - рассчитанные значения эффективности оценивания координаты У прототипом,
где: О - отклонения оценок от истинных значений;
И - отклонения измерений от истинных значений;
фиг. 7 - рассчитанные значения эффективности оценивания координаты У изобретением,
где: О - отклонения оценок от истинных значений;
И - отклонения измерений от истинных значений;
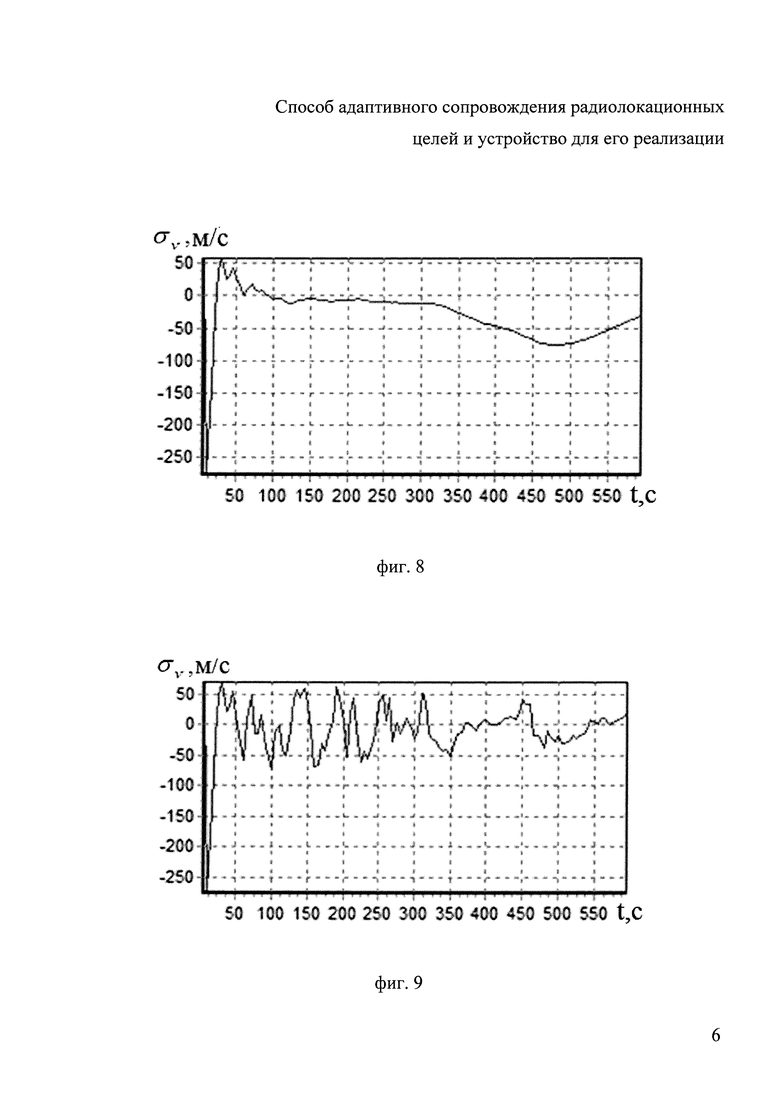
фиг. 8 - рассчитанные значения эффективности оценивания скорости прототипом.
фиг. 9 - рассчитанные значения эффективности оценивания скорости изобретением.
фиг. 10 - рассчитанные значения эффективности оценивания курса прототипом.
фиг. 11 - рассчитанные значения эффективности оценивания курса изобретением.
Заявленное устройство фиг. 1 выполнено с использованием следующих функциональных элементов, соединенных между собой определенным образом.
Вход преобразователя координат 1 подключен к обнаружителю РЛС, а выход последовательно соединен с одним из входов вычитателя 2, матричного усилителя 3, матричного сумматора 4, входом блока экстраполяции параметров траектории 5 и входом блока наблюдаемой координаты 6, выход которого соединен с другим входом вычитателя 2. При этом другой выход блока экстраполяции параметров траектории 5 присоединен к другому входу матричного сумматора 4. Кроме того, другой выход матричного сумматора 4 последовательно присоединен к входу преобразователя координат 10, устройству задержки на такт 11, преобразователю координат 12, вычислителю матрицы ошибок экстраполяции параметров траектории 7, вычислителю матрицы ошибок оценивания параметров траектории 8 и вычислителю матричного коэффициента усиления 9, выход которого присоединен к другому входу матричного усилителя 3. При этом другой выход вычислителя матрицы ошибок оценивания параметров траектории 8 соединен с другим входом вычислителя матрицы ошибок экстраполяции параметров траектории 7, другой вход вычислителя матричного коэффициента усиления 9 соединен с внешним источником, а другой выход преобразователя координат 10 соединен с потребителем.
Заявленное изобретение работает следующим образом.
В процессе сопровождения цели измеряемые РЛС сферические координаты цели - угол места εi, пеленг βi и дальность Дi, поступают в
преобразователь координат 1 для преобразования в прямоугольные координаты zxi, zyi, zzi. Указанное преобразование выполняется в соответствии с соотношениями:

Затем в вычитателе 2, матричном усилителе 3 и матричном сумматоре 4 осуществляют оценку поступивших от преобразователя координат 1 текущих параметров траектории цели, под которыми понимаются фильтрованные прямоугольные координаты цели  и их первые
и их первые  , вторые
, вторые  и т.д. производные, получаемые по результатам обработки прямоугольных координат цели xi, yi, zi. Оценку параметров траектории цели проводят посредством использования фильтра Калмана (Васильев К.К. Оптимальная обработка сигналов в дискретном времени: Учебное пособие. - М.: Радиотехника, 2016. - 288 с.), определяемого соотношениями:
и т.д. производные, получаемые по результатам обработки прямоугольных координат цели xi, yi, zi. Оценку параметров траектории цели проводят посредством использования фильтра Калмана (Васильев К.К. Оптимальная обработка сигналов в дискретном времени: Учебное пособие. - М.: Радиотехника, 2016. - 288 с.), определяемого соотношениями:

где  - вектор оцениваемых параметров траектории цели;
- вектор оцениваемых параметров траектории цели;
 - вектор экстраполированных параметров траектории;
- вектор экстраполированных параметров траектории;
Bi - матричный коэффициент усиления;
 - вектор измеренных координат;
- вектор измеренных координат;
C - матрица наблюдения;
Pi - корреляционная матрица ошибок оценивания;
Vni. - корреляционная матрица ошибок измерения координат;
Pэi - корреляционная матрица ошибок экстраполяции;
Е - единичная матрица;
Vξi - корреляционная матрица порождающего шума;
Ti - время, за которое произошло изменение положения цели;
i - текущий номер дискретного шага по времени оценивания, i=1, 2, 3, ….
В ходе оценки от преобразователя координат 1 в вычитатель 2 поступают координаты цели в прямоугольной системе координат и экстраполированные параметры траектории, рассчитанные в блоке экстраполяции параметров траектории 5 и скорректированные в соответствии с матрицей наблюдения С в блоке наблюдаемой координаты 6. Вычитатель 2 формирует сигналы ошибок оценки координат  как разности между соответствующими текущими измеренными координатами цели и экстраполированными координатами:
как разности между соответствующими текущими измеренными координатами цели и экстраполированными координатами:

Рассчитанное значение  поступает в матричный усилитель 3, куда также поступают коэффициент усиления фильтра βi с вычислителя матричного коэффициента усиления 9. Матричный усилитель 3 формирует взвешенные сигналы ошибок оценивания координат -
поступает в матричный усилитель 3, куда также поступают коэффициент усиления фильтра βi с вычислителя матричного коэффициента усиления 9. Матричный усилитель 3 формирует взвешенные сигналы ошибок оценивания координат -  которые поступают в матричный сумматор 4, куда также поступают экстраполированные координаты сопровождаемой цели
которые поступают в матричный сумматор 4, куда также поступают экстраполированные координаты сопровождаемой цели  из блока экстраполяции параметров траектории 5 для формирования по каждой прямоугольной координате оценки параметров траектории цели как суммы соответствующих экстраполированных координат и взвешенных в соответствии с коэффициентом усиления фильтра сигналов ошибок оценивания координат в соответствии с первым уравнением соотношения (2).
из блока экстраполяции параметров траектории 5 для формирования по каждой прямоугольной координате оценки параметров траектории цели как суммы соответствующих экстраполированных координат и взвешенных в соответствии с коэффициентом усиления фильтра сигналов ошибок оценивания координат в соответствии с первым уравнением соотношения (2).
Полученные значения оценок траекторных параметров из матричного сумматора 4 выдаются в преобразователь координат 10 для получения оценки в связанной с целью скоростной системе координат с вектором состояния параметров движения в виде  в соответствии с соотношениями:
в соответствии с соотношениями:

Изменение этих параметров задается следующими уравнениями:

где Δνi - СКО ускорения; ΔKi - СКО скорости изменения курса; Δφi - СКО скорости возможного изменения угла наклона траектории рассматриваемого класса целей, где размерность СКО ускорения м/сек2, а СКО скоростей - рад/сек. Эти же уравнения в векторной форме имеют следующий вид:

где  ; ϑVi=diag(ΔνiTi ΔKiTi ΔφiTi).
; ϑVi=diag(ΔνiTi ΔKiTi ΔφiTi).
Полученные оценки поступают в устройство задержки на такт 11 для выполнения задержки оценок параметров траектории до начала следующей итерации. При поступлении в обработку очередных координат цели от РЛС полученные на предыдущем шаге оценки поступают в преобразователь координат 12 для адаптации параметров ax,ay,az на
очередном шаге сопровождения цели с учетом корректирующих добавок для параметров фильтра - Δνi, ΔKi, Δφi.
Необходимость выполнения двойного преобразования координат обусловлена тем, что в предложенном способе используются линейные уравнения, соответствующие модели в декартовой системе координат:

Из уравнения для скорости цели по оси X в виде (νxi-νx(i-1))/Ti=axξxi, получают в левой части случайное ускорение на интервале времени между соседними отсчетами Ti. Предполагая ξi стандартной гауссовской случайной величиной (СВ), получают среднеквадратическое отклонение (СКО) ускорения ах. Аналогично для ay и az. Параметры ах, ау, az для различных типов целей выбираются по известным таблицам (Коновалов А.А. Основы траекторной обработки радиолокационной информации. Ч. 1. - СПб.: Изд-во СПбГЭТУ «ЛЭТИ», 2013. - 164 с.). При задании модели траектории с вектором состояния параметров движения в виде  в соответствии с моделью движения цели (6) Vξi=Е, матрица экстраполяции координат
в соответствии с моделью движения цели (6) Vξi=Е, матрица экстраполяции координат  имеет вид:
имеет вид:

здесь Ti - период (темп) измерения координат цели (оценки параметров), а корреляционная матрица ошибок измерения координат Vni задается как

где  - дисперсии ошибки измерения соответствующих координат.
- дисперсии ошибки измерения соответствующих координат.
В результате построенная модель описывается соотношением (6), в котором коэффициенты

рассчитываются на основе (6) из условия равенства дисперсий порождающих случайных последовательностей. Такое представление позволяет существенным образом упростить соответствующие способы фильтрации.
В уравнения (6) на каждом шаге подставляются оценки  параметров ускорения, полученные с помощью преобразования из связанной системы координат, за счет которого осуществляют учет направления движения целей и связанных с этим направлением различных возможностей по выполнению маневров по различным декартовым координатам при получении следующей оценки параметров траектории сопровождаемой цели. Линеаризация уравнений для проекций новых координат на оси декартовой системы осуществляется согласно следующим нелинейным уравнениям для вектора скоростей в декартовой системе координат, основанным на соотношении (5):
параметров ускорения, полученные с помощью преобразования из связанной системы координат, за счет которого осуществляют учет направления движения целей и связанных с этим направлением различных возможностей по выполнению маневров по различным декартовым координатам при получении следующей оценки параметров траектории сопровождаемой цели. Линеаризация уравнений для проекций новых координат на оси декартовой системы осуществляется согласно следующим нелинейным уравнениям для вектора скоростей в декартовой системе координат, основанным на соотношении (5):

где 


Таким образом, за счет соответствующим образом подобранного преобразовательного процесса  уравнения в связанных координатах «встраиваются» в линейную модель траектории движения сопровождаемой цели и ошибок измерения ее координат (6).
уравнения в связанных координатах «встраиваются» в линейную модель траектории движения сопровождаемой цели и ошибок измерения ее координат (6).
В заявленном изобретении ковариационная матрица ошибок экстраполяции рэi определяется в вычислителе матрицы ошибок экстраполяции параметров траектории 7 в соответствии с пятым уравнением соотношения (2) с учетом нелинейной зависимости матрицы возмущений  от вектора состояния.
от вектора состояния.
Ковариационная матрица  порождающего процесса содержит ненулевые диагональные элементы, которые определяются в преобразователе координат 12 с учетом оцененных значений скорости цели V(i-1), курса Кi-1 и угла наклона траектории φi-1 в связанной системе координат согласно следующему выражению:
порождающего процесса содержит ненулевые диагональные элементы, которые определяются в преобразователе координат 12 с учетом оцененных значений скорости цели V(i-1), курса Кi-1 и угла наклона траектории φi-1 в связанной системе координат согласно следующему выражению:

и поступает в вычислитель матрицы ошибок экстраполяции параметров траектории 7, куда также поступает корреляционная матрица ошибок оценивания параметров траектории Pi-1 из вычислителя матрицы ошибок оценивания параметров траектории 8.
Матрица ошибок экстраполяции Pэi из вычислителя матрицы ошибок экстраполяции параметров траектории 7 подается в вычислитель матрицы ошибок оценивания параметров траектории 8, где определяется соответствующая матрица Pi в соответствии с четвертым уравнением соотношения (2), которая подается в вычислитель матричного коэффициента усиления 9, куда от внешнего источника подается корреляционная матрица ошибок измерения координат Vni в соответствии с соотношением (8). Коэффициент усиления Bi определяется в текущем времени оценки траектории в соответствии с третьим уравнением соотношения (2).
При независимых наблюдениях по трем координатам фильтр из состава устройства распадается на три несвязанных линейных фильтра, вектор состояния каждого из которых включает соответствующую координату цели и скорость ее изменения. При этом уравнение фильтрации каждого из фильтров для координаты xi и соответствующей скорости νxi по наблюдениям  запишется в виде:
запишется в виде:

где  а матрицы Bi находятся согласно третьего уравнения соотношения (2) с учетом
а матрицы Bi находятся согласно третьего уравнения соотношения (2) с учетом 
При отсутствии наблюдений компонент скорости цели при расчете коэффициентов Bi в вычислителе матричного коэффициента усиления 9 не требуется выполнение операции обращения матрицы. Это позволяет осуществить реализацию системы траекторной фильтрации с минимальными вычислительными затратами.
Схема, изображенная на фиг. 1 с указанием всех необходимых связей между составными частями, фактически является полной схемой устройства адаптивного сопровождения радиолокационных целей для реализации предложенного способа. Эта схема совместно с описанием последовательности и содержания операций, выполняемых устройством, достаточна для реализации устройства, как на интегральных микросхемах, например, на ПЛИС и микроконтроллерах, так и в виде комплекта программных модулей, объединенных связями в соответствии с приведенной схемой, функционирующих в ЭВМ и выполняющих функции узлов схем.
Проверка возможности получения заявленного технического результата при осуществлении изобретения проведена методом моделирования с применением ЭВМ.
На фиг. 2 показаны результаты работы прототипа по цели, движущейся со скоростью 1000 м/с и случайными возмущениями по курсу с СКО 1,0 град/с, где Т - истинная траектория движения цели, Н - наблюдения, полученные от РЛС, Ф - траектория, восстановленная по оценкам от прототипа. При этом прототип настроен на сопровождение равномерно движущейся цели со скоростью 10 м/с и случайными возмущениями по курсу с СКО 0,5 град/с. Показанные расхождения подтверждают, что способ предложенный в прототипе не обеспечивает необходимую точность сопровождения цели, когда фактические параметры движения цели отличаются от параметров, на которые настроен прототип.
Приведенные результаты работы изобретения на фиг.3 при тех же исходных данных показывают, что сопровождение продолжается, даже когда фактические параметры движения цели отличаются от параметров, на которые настроено изобретение. Такой результат достигается благодаря адаптации параметров изобретения к маневрированию цели непосредственно в ходе сопровождения за счет фильтрации в связанной системе координат. При этом Т - истинная траектория движения цели, Н -наблюдения, полученные от РЛС, Ф - траектория, восстановленная по оценкам от прототипа.
На фиг. 4-7 приведены результаты измерения статистического среднего случайной величины отклонения наблюдений соответсвующих координат и сглаженных координат от истинных координат цели для прототипа и изобретения. При этом О - отклонения оцененных значений от истинных, И - отклонения измерений РЛС от истинных значений. Полученные результаты подтверждают лучшую точность оценивания изобретения, поскольку его оценки имеют меньшее отклонение от истинных значений.
На фиг. 8-11 приведены результаты измерения статистического среднего случайной величины отклонения сглаженной скорости и курса движения цели у изобретения и прототипа. Полученные результаты подтверждают лучшую точность оценивания изобретения, поскольку его оценки имеют меньшее значение отклонений.
Таким образом, предлагаемое изобретение обеспечивает повышение устойчивости сопровождения и точности оценки параметров траектории сопровождаемой цели в условиях неопределенности динамики ее движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ ТРАЕКТОРИИ ОБЪЕКТА | 2016 |
|
RU2610831C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ ЦЕЛЕЙ С ФОРМИРОВАНИЕМ СТРОБА В СВЯЗАННОЙ С ЦЕЛЬЮ СИСТЕМЕ КООРДИНАТ | 2019 |
|
RU2707581C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| СПОСОБ И УСТРОЙСТВО СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩИХ ЦЕЛЕЙ В ОБЗОРНОЙ ДОПЛЕРОВСКОЙ РЛС | 2023 |
|
RU2815305C1 |
| СПОСОБ ТРАССОВОГО СОПРОВОЖДЕНИЯ ВОЗДУШНЫХ МАНЕВРИРУЮЩИХ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ ПО ПЕЛЕНГОВОЙ ИНФОРМАЦИИ ОТ ОДНОПОЗИЦИОННОЙ СИСТЕМЫ РАДИОТЕХНИЧЕСКОЙ РАЗВЕДКИ ВОЗДУШНОГО БАЗИРОВАНИЯ | 2017 |
|
RU2660498C1 |
| ТРЕХМЕРНЫЙ АДАПТИВНЫЙ α-β ФИЛЬТР | 2016 |
|
RU2631766C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 1993 |
|
RU2048684C1 |
| СПОСОБ БОНДАРЕНКО А.В. ПОЛУЧЕНИЯ РАДИОТЕХНИЧЕСКОЙ ИНФОРМАЦИИ И РАДИОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2599259C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА МЕСТА НИЗКОЛЕТЯЩЕЙ ЦЕЛИ И МОНОИМПУЛЬСНАЯ РЛС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2802886C1 |





Изобретение относится к области радиолокации, в частности к вторичной обработке радиолокационной информации, и предназначено для использования в системах сопровождения подвижных целей. Технический результат - повышение устойчивости сопровождения и точности оценки параметров траектории сопровождаемой цели в условиях неопределенности динамики ее движения. Указанный результат достигается за счет того, что в устройство дополнительно вводят устройство задержки на такт и два преобразователя координат, которые обеспечивают реализацию способа адаптивного сопровождения радиолокационных целей, основанного на преобразовании полученных от РЛС координат цели в прямоугольные координаты, которые используют для оценки параметров траектории цели фильтра Калмана, при этом сопровождение ведется в связанной с целью скоростной системе координат, вектор состояния которой включает координаты цели х, у, z, скорость - V, курс - K и угол наклона траектории - ϕ, а при получении по предшествующим наблюдениям очередной оценки скорости цели V(i-1), курса Ki-1 и угла наклона траектории φi-1 в связанной с целью скоростной системе координат рассчитываются корректирующие добавки для параметров фильтра - Δνi, ΔKi, Δφi - необходимые для адаптации параметров ах, ау, az на каждом шаге сопровождения цели, которые используются для учета направления движения целей и связанных с этим направлением различных возможностей по выполнению маневров по различным декартовым координатам при получении следующей оценки параметров траектории сопровождаемой цели. 2 н.п. ф-лы, 11 ил.
1. Способ адаптивного сопровождения радиолокационных целей, заключающийся в преобразовании полученных от РЛС координат цели в прямоугольные координаты, которые используют для оценки параметров траектории цели фильтра Калмана, включающего последовательные экстраполяцию параметров траектории, формирование сигналов ошибок оценки координат как разностей между соответствующими текущими измеренными и экстраполированными координатами цели, вычисление корреляционных матриц ошибок экстраполяции и ошибок оценивания параметров траектории, отличающийся тем, что сопровождение ведут в связанной с целью скоростной системе координат, вектор состояния которой включает координаты цели х, у, z, скорость - V, курс - K и угол наклона траектории - φ, а при получении по предшествующим наблюдениям очередной оценки скорости цели V(i-1), курса Ki-1 и угла наклона траектории φi-1 в связанной с целью скоростной системе координат рассчитывают корректирующие добавки для параметров фильтра - Δνi, ΔKi, Δφi - необходимые для адаптации параметров ax, ay, az на каждом шаге сопровождения цели, которые используют для учета направления движения целей и связанных с этим направлением различных возможностей по выполнению маневров по различным декартовым координатам при получении следующей оценки параметров траектории сопровождаемой цели.
2. Устройство адаптивного сопровождения радиолокационных целей, включающее последовательно соединенные первый преобразователь координат, вход которого подключен к обнаружителю радиолокационной станции, вычитатель, матричный усилитель, матричный сумматор, блок экстраполяции параметров траектории, блок наблюдаемой координаты, выход которого соединен с другим входом вычитателя, второй выход блока экстраполяции параметров траектории соединен с другим входом матричного сумматора, включающее также последовательно соединенные вычислитель матрицы ошибок экстраполяции параметров траектории, вычислитель матрицы ошибок оценивания параметров траектории, вычислитель матричного коэффициента усиления, выход которого присоединен к другому входу матричного усилителя, другой выход вычислителя матрицы ошибок оценивания параметров траектории присоединен к входу вычислителя матрицы ошибок экстраполяции параметров траектории, кроме того, в вычислитель матричного коэффициента усиления от внешнего источника подается корреляционная матрица ошибок измерения координат, отличающееся тем, что дополнительно включены второй и третий преобразователи координат и устройство задержки на такт, причем вход второго преобразователя координат соединен с другим выходом матричного сумматора, выход второго преобразователя координат соединен с устройством задержки на такт, другой выход второго преобразователя координат соединен с потребителем, выход устройства задержки на такт соединен с третьим преобразователем координат, выход которого соединен с другим входом вычислителя матрицы ошибок экстраполяции параметров траектории.
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ ТРАЕКТОРИИ ОБЪЕКТА | 2016 |
|
RU2610831C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СПОСОБ БЕССТРОБОВОГО АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ПОДВИЖНОЙ ЦЕЛИ | 2013 |
|
RU2551356C1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| JP 2002181926 A, 26.06.2002 | |||
| US 7626535 B2, 01.12.2009 | |||
| US 5379044 A, 03.01.1995. | |||

