Настоящее изобретение относится к приводным механизмам для передачи крутящего момента, по меньшей мере, на первый и второй ведомые элементы, в частности на различные колесные оси автотранспортного средства. Кроме того, изобретение относится к автотранспортным средствам, в частности автомобилям с гибридным приводом, оснащенным двигателем и электрическим приводом.
Предпосылки создания изобретения и уровень техники
В современных системах приводов, таких как силовые передачи автотранспортных средств, все большее значение приобретают системы векторизации крутящего момента и активного поддержания курсовой устойчивости. Системы активного поддержания курсовой устойчивости или векторизации крутящего момента обеспечивают избирательное неравномерное распределение крутящего момента между левым и правым колесами оси автомобиля. Соответственно для воздействия на угловое ускорение рыскания автомобиля в системах активного поддержания курсовой устойчивости или векторизации крутящего момента предусмотрен своего рода управляющий эффект, способный обеспечивать маневренность и устойчивость автомобиля.
По существу, системы активного поддержания курсовой устойчивости или векторизации крутящего момента повышают устойчивость автомобиля в случае недостаточной или избыточной реакции на поворот руля. Следовательно, возникающий момент рыскания может быть компенсирован за счет точно дозированных продольных усилий, воздействующих на переднюю и заднюю оси. Этим способом может обеспечиваться оптимизированная боковая динамика привода с полной регулировкой. Системы активного поддержания курсовой устойчивости дополнительно способны повышать скорость реагирования и замедление на виражах в результате вводимых водителем управляющих команд, что делает автомобиль более восприимчивым и легче управляемым.
В целом, в системах активного поддержания курсовой устойчивости и векторизации крутящего момента используется ответвление определенного количества крутящего момента от тягового приводного механизма. Существующие системы изменяют смещение крутящего момента между левым и правым колесами оси. Эти механизмы снижают обороты внутреннего колеса и увеличивают обороты наружного колеса. Это означает, что независимо от входного крутящего момента будет существовать разность крутящих моментов, пропорциональная заданной разности оборотов колес. Согласно стандартным существующим решениям между левым и правым колесами оси устанавливают передаточные механизмы, при этом соответствующие приводные валы передаточных механизмов должны быть связаны с тяговым приводом или с соответствующими колесами посредством множества сцеплений.
Одним из недостатков систем с фиксированным разностным отношением оборотов, управляемых посредством предохранительной фрикционной муфты, является то, что смещение зависит от радиуса поворота и степени замыкания муфты. Разумеется, что пробуксовка сцепления приводит к его износу и потерям энергии, что ограничивает длительность и количество зацеплений. Кроме того, трансмиссии с разностью оборотов создают потери на сопротивление движению, даже когда они не используются. Наконец, векторизация невозможна, если разность оборотов свободного качения вследствие крутого поворота равна или превышает передаточное отношение.
Практически в любой системе активного поддержания курсовой устойчивости или векторизации крутящего момента используется такое ответвление крутящего момента с целью смещения крутящего момента между двумя выходными валами дифференциала.
Такое решение описано, например, в DE 102005040253 B3. Для этого используются два сцепления, наружные части которых натянуты в осевом направлении с помощью перемычки.
Обычно такие системы активного поддержания курсовой устойчивости или векторизации крутящего момента являются довольно сложными для конструирования и дорогостоящими в производстве. Согласно недавним разработкам предложено использовать дополнительный вспомогательный электрический двигатель для обеспечения смещенного крутящего момента, подаваемого на различные колесные оси, которые являются объектом активного поддержания курсовой устойчивости или векторизации крутящего момента. Поскольку активное поддержание курсовой устойчивости или векторизация крутящего момента в стандартных случаях применения используется лишь эпизодически, вспомогательный двигатель простаивает на протяжении временных интервалов, когда он не требуется.
Задача изобретения
Соответственно в основу изобретения положена задача создания приводного механизма для передачи крутящего момента, по меньшей мере, на первый и второй ведомые элементы с возможностью более эффективного и универсального использования привода, такого как вспомогательный двигатель. Кроме того, одной из дополнительных задач изобретения является создание приводного механизма для передачи и распределения крутящего момента с простой внутренней конструкцией, обеспечивающей технологичность и рентабельность изготовления.
Краткое изложение сущности изобретения
В настоящем изобретении предложен приводной механизм для передачи крутящего момента, по меньшей мере, на первый и второй ведомые элементы. Приводной механизм содержит генерирующий крутящий момент привод, который оперативно связан с первым и вторым ведомыми элементами. Кроме того, приводной механизм содержит переключающий элемент, который оперативно связан с приводом для избирательного соединения привода с первым и вторым ведомыми элементами.
С помощью переключающего элемента соединение привода с первым и вторым ведомыми элементами может осуществляться в режиме тяги или векторном режиме. Соответственно с помощью переключающего элемента генерирующий крутящий момент привод может быть соединен с первым и вторым ведомыми элементами в двух режимах, в которых крутящий момент, создаваемый приводом, по-разному передается на первый и второй ведомые элементы.
В режиме тяги привод соединен с первым и вторым ведомыми элементами таким образом, что крутящий момент, создаваемый или генерируемый приводом, подводится к первому и второму ведомым элементам в одном и том же направлении. Следовательно, генерируемый крутящий момент передается на оба ведомых элемента в направлении их вращения. При реализации в транспортном средстве, в котором первый и второй ведомые элементы соответствуют левой и правой колесным осям автомобиля, оба колеса вращаются в одном направлении. Соответственно такой крутящий момент может использоваться при движении автомобиля по прямой.
В другом режиме, называемом векторным режимом, крутящий момент привода подводится к первому и второму ведомым элементам в противоположных направлениях. Например, крутящий момент, генерируемый приводом, подается на первый ведомый элемент в положительном направлении, а на второй ведомый элемент подается соответствующий отрицательный крутящий момент или крутящий момент со смещением в отрицательном направлении.
Применительно к реализации в транспортном средстве правое или наружное колесо в качестве первого ведомого элемента может вращаться быстрее, а левое или внутреннее колесо в качестве второго ведомого элемента может вращаться медленнее за счет противоположной, предпочтительно диаметрально противоположной передачи крутящего момента на первый и второй ведомые элементы. Следовательно, в векторном режиме привод преимущественно используется для векторизации крутящего момента или в целях системы активного поддержания курсовой устойчивости. В этом режиме привод служит для улучшения маневренности и устойчивости автомобиля при поворотах в случае недостаточной или избыточной реакции на поворот руля.
С помощью переключающего элемента привод может повсеместно применяться для обеспечения тяги, а также в целях векторизации крутящего момента автотранспортного средства. Так, при нахождении переключающего элемента в режиме тяги привод поддерживает общую тягу для обеспечения движения автомобиля. В отличие от этого в векторном режиме привод соединен с первым и вторым ведомыми элементами таким образом, чтобы генерируемый приводом смещенный крутящий момент подавался на первый и второй ведомые элементы в противоположных направлениях, то есть навстречу друг другу.
Согласно первому варианту осуществления изобретения привод содержит первый и второй элементы привода, установленные с возможностью вращения относительно друг друга. Следовательно, за счет того, что первый и(или) второй элементы привода установлены с возможностью вращения, обеспечивается вращательное движение первого и второго элементов привода относительно друг друга. Например, первый или второй элемент привода может быть неподвижно зафиксирован, а второй или первый элемент привода может вращаться относительно первого или второго элемента привода. Относительное перемещение и, следовательно, вращательное движение, например, первого элемента привода относительно второго элемента привода и наоборот может придаваться, например, генерируемыми электромеханическими усилиями, действующими на первый и второй элементы привода.
В одном из дополнительных вариантов осуществления приводом является электрический двигатель, а первый и второй элементы привода выполнены в виде ротора и статора. Первый элемент привода выполнен в виде ротора, а второй элемент привода выполнен в виде статора. При подаче соответствующей электроэнергии оба элемента привода начинают вращаться относительно друг друга. В некоторых случаях реализации, когда переключающий элемент находится в режиме тяги, статор в качестве первого элемента привода может быть зафиксирован или неподвижен, а в векторном режиме как статор, так и ротор могут быть установлены с возможностью вращения и могут вращаться в противоположных направлениях вокруг общей оси.
В одном из дополнительных предпочтительных вариантов осуществления переключающий элемент соединен, предпочтительно жестко соединен с первым элементом привода.
Кроме того, переключающий элемент способен избирательно соединяться с первым ведомым элементом или с фиксированной корпусной деталью. В зависимости то того, соединен ли переключающий элемент с первым ведомым элементом или с фиксированной и неподвижной корпусной деталью, выбирается соответствующий режим, а именно векторный режим или режим тяги. Обычно, когда переключающий элемент соединен с первым ведомым элементом, он находится в векторном режиме. Если переключающий элемент соединен с корпусной деталью, например деталью ходовой части или кузова автомобиля, он будет находиться в режиме тяги.
За счет соединения переключающего элемента и первого элемента привода функции переключения могут быть полностью встроены в сам привод. Функции переключения предпочтительно предусматривают избирательное соединение статора электрического двигателя с неподвижной корпусной деталью или с первым ведомым элементом.
Кроме того, в другом варианте осуществления второй элемент привода оперативно связан со вторым ведомым элементом. За счет этого в зависимости от конфигурации и выбранного режима переключающего элемента крутящий момент, генерируемый приводом, может передаваться на первый и второй ведомые элементы в одном направлении или в противоположных направлениях, то есть навстречу друг другу.
В вариантах осуществления, в которых переключающий элемент соединен или связан с первым элементом привода, первый элемент привода также может избирательно соединяться с первым ведомым элементом или с фиксированной корпусной деталью с помощью переключающего элемента. За счет этого переключающий элемент обеспечивает избирательную блокировку первого элемента привода.
В другом дополнительном предпочтительном варианте осуществления разъемное соединение между переключающим элементом и первым ведомым элементом обеспечивает соединительный элемент, который с возможностью вращения соединен с первым ведомым элементом. Соединительный элемент предпочтительно непосредственно и жестко соединен с первым ведомым элементом, например приводным валом колеса. В стандартных вариантах осуществления соединительный элемент проходит в радиальном направлении до вращающегося первого ведомого элемента. Соединительный элемент предпочтительно выполнен в виде фланца.
Кроме того, он может входить во фрикционное или принудительное соединение с переключающим элементом, который в свою очередь служит для передачи крутящего момента между первым элементом привода и первым ведомым элементом посредством соединительного элемента. Разъемное соединение переключающего элемента и соединительного элемента может представлять собой механизм типа муфтового соединения, позволяющий соединять и разъединять переключающий элемент и соединительный элемент, даже если эти компоненты вращаются с различными частотами вращения.
Согласно другому дополнительному предпочтительному варианту осуществления изобретения первый и второй ведомые элементы, а также привод оперативно связаны с дифференциалом. Посредством дифференциала на первый и второй ведомые элементы может подаваться дополнительный крутящий момент. Кроме того, первый и второй ведомые элементы механически связаны посредством дифференциала. В предпочтительных вариантах осуществления привод непосредственно связан с первым ведомым элементом и дополнительно связан со вторым ведомым элементом посредством дифференциала.
В одном из дополнительных вариантов осуществления дифференциал выполнен в виде планетарного дифференциала, имеющего зубчатое колесо с наружными зубьями, которое оперативно связано со вторым элементом привода.
В стандартных случаях реализации второй элемент привода непосредственно не соединен с зубчатым колесом с наружными зубьями планетарного дифференциала. Второй элемент привода и зубчатое колесо с наружными зубьями могут быть механически связаны посредством передаточного механизма для обеспечения достаточного крутящего момента. Кроме того, соединительный элемент и первый ведомый элемент также могут быть связаны передаточным механизмом.
Помимо этого первый ведомый элемент оперативно связан с водилом планетарного дифференциала, а второй ведомый элемент оперативно связан с солнечной шестерней планетарного дифференциала. Первый ведомый элемент предпочтительно непосредственно соединен с водилом планетарного дифференциала, и(или) второй ведомый элемент непосредственно соединен с солнечной шестерней планетарного дифференциала.
На водиле планетарного дифференциала с возможностью вращения установлено множество планетарных шестерен, которые входят в зацепление с кольцевым зубчатым колесом и с солнечной шестерней планетарного дифференциала.
На водиле может быть установлено два или даже более комплектов расположенных по соседству пар планетарных шестерен, при этом внутренняя планетарная шестерня входит в зацепление с солнечной шестерней и дополнительно с наружной планетарной шестерней. Наружная планетарная шестерня в свою очередь входит в зацепление с внутренней планетарной шестерней и с кольцевым зубчатым колесом планетарного дифференциала. За счет этого обеспечивается одинаковое направление вращения солнечной шестерни и зубчатого колеса с наружными зубьями.
В одном из альтернативных вариантов осуществления дифференциал выполнен в виде дифференциала с коническими шестернями, имеющего водило, которое оперативно связано со вторым элементом привода.
Кроме того, первый и второй ведомые элементы приводного механизма оперативно связаны с противоположно расположенными полуосевыми шестернями дифференциала с коническими шестернями. Дифференциал с коническими шестернями дополнительно содержит, по меньшей мере, один, предпочтительно два сателлита, с возможностью вращения установленных на валах-шестернях, которые жестко соединены с водилом дифференциала.
Согласно другой особенности изобретения предложен автомобиль с гибридным приводом, оснащенный двигателем и электрическим приводом. Электрический привод способен избирательно соединяться с первым и вторым приводными валами ведомой оси, при этом автомобиль с гибридным приводом отличается тем, что имеет описанный выше приводной механизм. В стандартных вариантах осуществления первый и второй ведомые элементы распределяющего крутящий момент приводного механизма выполнены в виде полуосей ведомой оси автомобиля, при этом ведущий дифференциал соединен, например, с силовой передачей с приводом от двигателя внутреннего сгорания.
За счет этого обеспечивается соединение и связь первого и второго ведомых элементов с левым и правым колесами передней и(или) задней осей автомобиля.
В одном из дополнительных или альтернативных вариантов осуществления также предусмотрено соединение первого и второго ведомых элементов с передней и задней осями автомобиля для избирательного обеспечения неравномерного распределения крутящего момента на переднюю и заднюю оси автомобиля.
Краткое описание чертежей
Далее настоящее изобретение без ограничения общности будет более подробно описано применительно к предпочтительным вариантам его осуществления со ссылкой на чертежи, на которых:
на фиг.1 схематически проиллюстрирован вид в поперечном разрезе первого варианта осуществления приводного механизма с переключающим элементом в режиме тяги,
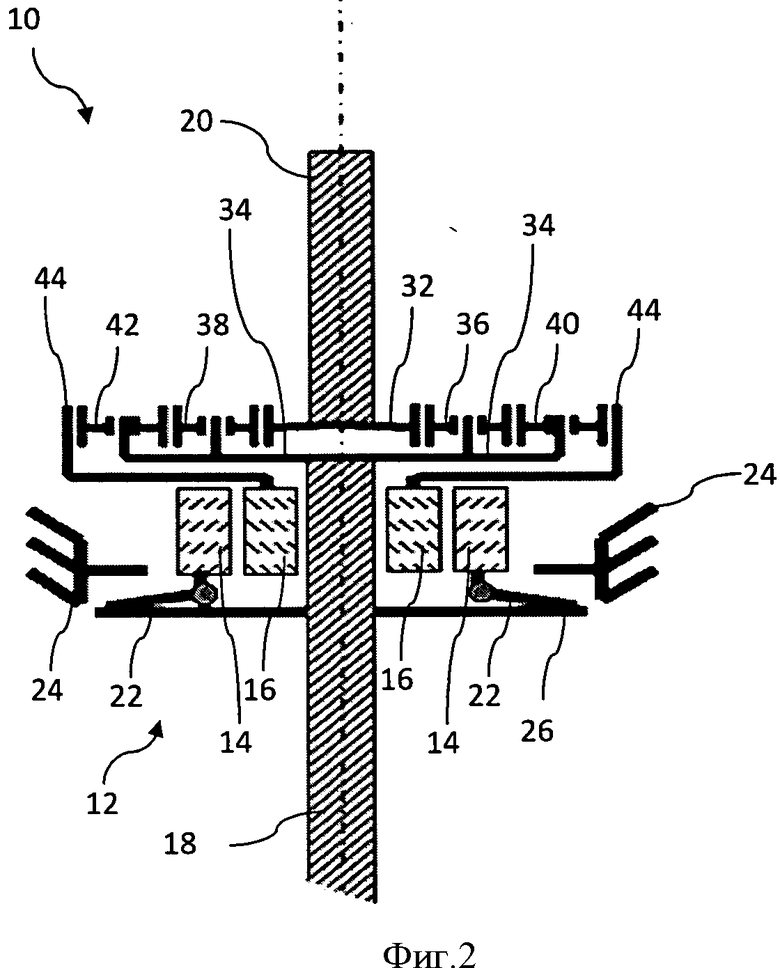
на фиг.2 показан проиллюстрированный на фиг.1 вариант осуществления, в котором переключающий элемент находится в векторном режиме,
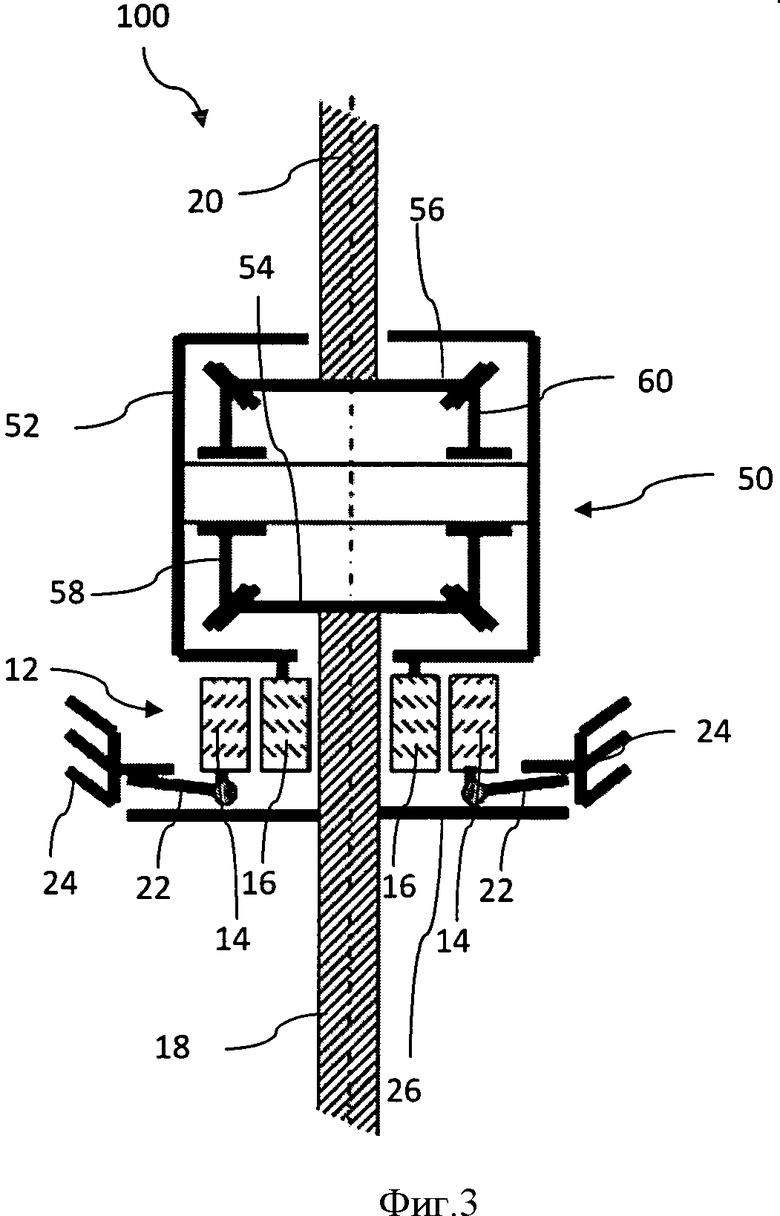
на фиг.3 показан вид в поперечном разрезе другого варианта осуществления с переключающим элементом в режиме тяги,
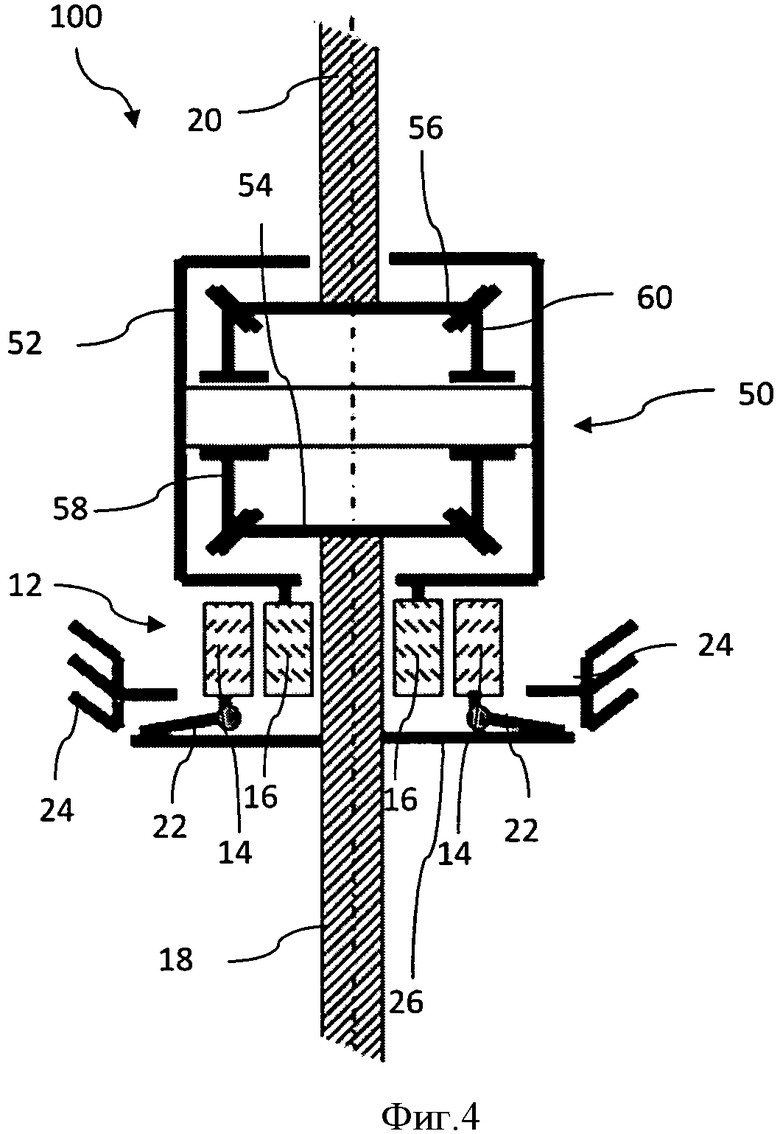
на фиг.4 показан проиллюстрированный на фиг.3 вариант осуществления, в котором переключающий элемент находится в векторном режиме.
Подробное описание
Согласно варианту осуществления, проиллюстрированному на фиг.1 и 2, приводной механизм 10 содержит электрический двигатель 12, который имеет статор 14, именуемый первым элементом привода, и ротор 16, именуемый вторым элементом привода.
Приводной механизм 10 дополнительно содержит планетарный дифференциал 30, имеющий солнечную шестерню 32 и водило 34 с установленными с возможностью вращения планетарными шестернями 36, 38, 40, 42. Планетарный дифференциал 30 дополнительно имеет зубчатое колесо 44 с наружными зубьями, которое входит в зацепление с наружными планетарными шестернями 40, 42. Эти наружные планетарные шестерни 40, 42 входят в зацепление с внутренними планетарными шестернями 36, 38, которые в свою очередь входят в зацепление с солнечной шестерней 32.
Кроме того, с планетарным водилом 34 непосредственно связан или соединен первый ведомый элемент 18, а с солнечной шестерней 32 планетарного дифференциала 30 непосредственно связан или соединен второй ведомый элемент 20.
В проиллюстрированной на фиг.1 конфигурации статор 14 электрического двигателя 12 механически соединен или связан с корпусной деталью 24 с помощью переключающего элемента 22. Корпусная деталь 24 установлена без возможности вращения. Корпусная деталь 24, например, жестко соединена или связана с ходовой частью или кузовом автомобиля.
С помощью переключающего элемента 22 может избирательно блокироваться вращение статора 14 электрического двигателя 12. Такое заблокированное состояние, соответствующее режиму тяги, проиллюстрировано на фиг.1. На фиг.2 представлен векторный режим, в котором переключающий элемент отсоединен от корпусной детали 24, а переключающий элемент 22 соединен с соединительным элементом 26.
Соединительный элемент 26, схематически проиллюстрированный горизонтальной, преимущественно прямой линией, проходит в радиальном направлении от первого ведомого элемента 18. Соединительный элемент 26 может входить во фрикционное или принудительное соединение с переключающим элементом 22 для передачи крутящего момента между ним и первым ведомым элементом 18, когда статору 14 сообщается вращательное движение. Соединение соединительного элемента 26 и переключающего элемента 22 может походить на муфтовое соединение, позволяющее соединять и разъединять переключающий элемент 22 и соединительный элемент 26, даже если эти компоненты вращаются с различными частотами вращения.
В режиме тяги, как показано на фиг.1, в результате приведения в действие электрического двигателя 12 начинается вращение ротора 16. Это вращение передается кольцевому зубчатому колесу 44 планетарного дифференциала 30. Обычно механическое соединение ротора 16 и кольцевого зубчатого колеса 44 дополнительно содержит передаточный механизм для подачи достаточного крутящего момента на кольцевое зубчатое колесо 44. Поскольку на планетарном водило 34 с возможностью вращения установлены расположенные по соседству в радиальном направлении комплекты планетарных шестерен 36, 40 и 38, 42, вращательное движение кольцевого зубчатого колеса 44 преобразуется во вращательное движение первого и второго ведомых элементов 18, 20, при этом первый и второй ведомые элементы 18, 20 вращаются в одном и том же направлении.
Следовательно, путем приведения в действие электрического двигателя 12 и при нахождении переключающего элемента в режиме тяги крутящий момент, генерируемый приводом 12, в одном и том же направлении передается как на первый, так и на второй ведомые элементы 18, 20.
В векторном режиме, как показано на фиг.2, статор 14 с возможностью вращения соединен с первым ведомым элементом 18. В этом случае свободно вращаются оба элемента привода, как статор 14, так и ротор 16, а поскольку ротор 16 и статор 14 совершают относительное вращательное движение по отношению друг к другу, первый и второй ведомые элементы 18, 20 также будут вращаться в различных направлениях. Следовательно, крутящий момент, генерируемый приводом 12, передается на первый и второй ведомые элементы в противоположных направлениях.
Дополнительно предусмотрено, что дифференциал 30 служит ведущей шестерней для приведения в движение первого и второго ведомых элементов 18, 20. В таких вариантах осуществления в результате приведения в действие привода 12 в векторном режиме, например, может увеличиваться крутящий момент на первом ведомом элементе 18 и уменьшаться крутящий момент на втором ведомом элементе 20 или наоборот в зависимости от относительного вращательного движения статора 14 и ротора 16.
Таким образом, крутящий момент, генерируемый приводом 12, может рассматриваться как смещенный крутящий момент для наложения в положительном или отрицательном направлении на крутящий момент, создаваемый и распределяемый ведущим дифференциалом 30.
По сравнению с вариантом осуществления, показанным на фиг.1 и 2, в варианте осуществления, показанном на фиг.3 и 4, планетарный дифференциал заменен дифференциалом 50 с коническими шестернями. В данном случае ротор 16 соединен и связан с водилом 52 дифференциала. Первый ведомый элемент 18 непосредственно связан с полуосевой шестерней 54, а второй ведомый элемент непосредственно связан с противоположной полуосевой шестерней 56.
Обе полуосевые шестерни соединены друг с другом сателлитами 58, 60, установленными на валах-шестернях, которые соединены с водилом 52 дифференциала. Этот приводной механизм 100, в котором используется дифференциал 50 с коническими шестернями, прямо сопоставим по своим функциональным возможностям с вариантом осуществления, показанным на фиг. 1 и 2. В режиме тяги или блокировки, показанном на фиг.3, в результате приведения в действие электрического двигателя 12 происходит соответствующее вращение водила 52 дифференциала. Оно свою очередь преобразуется в соответствующее однонаправленное вращательное движение первого и второго ведомых элементов 18, 20.
Таким образом, в этом режиме тяги, проиллюстрированном на фиг.3, крутящий момент, создаваемый приводом 12, в одном и том же направлении передается на первый и второй ведомые элементы 18, 20.
В векторном режиме, показанном на фиг.4, статор 14 в качестве первого элемента привода отсоединен от корпусной детали 24 и с возможностью вращения соединен с ведомым элементом 18 посредством соединительного элемента 26. При этой конфигурации в результате приведения в действие электрического двигателя 12 происходит противоположно направленная передача крутящего момента на первый и второй ведомые элементы 18, 20.
Кроме того, в этом варианте осуществления дифференциал 50 с коническими шестернями может служить ведущим дифференциалом для подачи как на первый, так на и второй ведомые элементы 18, 20 одинакового крутящего момента, который может генерироваться конкретно не проиллюстрированным дополнительным двигателем, таким как двигатель внутреннего сгорания в автомобиле с гибридным приводом.
Наконец, приводной механизм, проиллюстрированный на фиг.1-4, рассчитан на реализацию в автомобиле с гибридным приводом, оснащенным, по меньшей мере, первым двигателем, например, внутреннего сгорания и вторым двигателем, например электрическим двигателем. С помощью приводных механизмов 10, 100 крутящий момент, создаваемый электрическим двигателем 12, может избирательно использоваться в общих целях тяги или в целях векторизации крутящего момента или активного поддержания курсовой устойчивости.
Список позиций
10 приводной механизм
12 электрический двигатель
14 статор
16 ротор
18 ведомый элемент
20 ведомый элемент
22 переключающий элемент
24 корпусная деталь
26 соединительный элемент
30 планетарный дифференциал
32 солнечная шестерня
34 водило
36 планетарная шестерня
38 планетарная шестерня
40 планетарная шестерня
42 планетарная шестерня
44 кольцевое зубчатое колесо
50 дифференциал с коническими шестернями
52 водило дифференциала
54 полуосевая шестерня
56 полуосевая шестерня
58 сателлит
60 сателлит
100 приводной механизм
Изобретение относится к приводным механизмам для передачи крутящего момента. Приводной механизм для передачи крутящего момента на первый и второй ведомый элемент содержит привод и переключающий элемент, связанный с приводом. Переключающий элемент избирательно соединяется с первым ведомым элементом в векторном режиме или с неподвижной корпусной деталью в режиме тяги. Переключающий элемент соединяется с первым ведомым элементом посредством соединительного элемента. В режиме тяги крутящий момент привода подводится к первому и второму ведомым элементам в одном и том же направлении, а в векторном режиме - в противоположных направлениях. Первый и второй ведомые элементы и привод связаны с дифференциалом, содержащим зубчатое колесо с наружными зубьями, связанное со вторым элементом привода. Первый ведомый элемент связан с водилом планетарного дифференциала, а второй ведомый элемент связан с солнечной шестерней планетарного дифференциала. Достигается повышение эффективности передачи крутящего момента и упрощение конструкции. 7 з.п. ф-лы, 4 ил.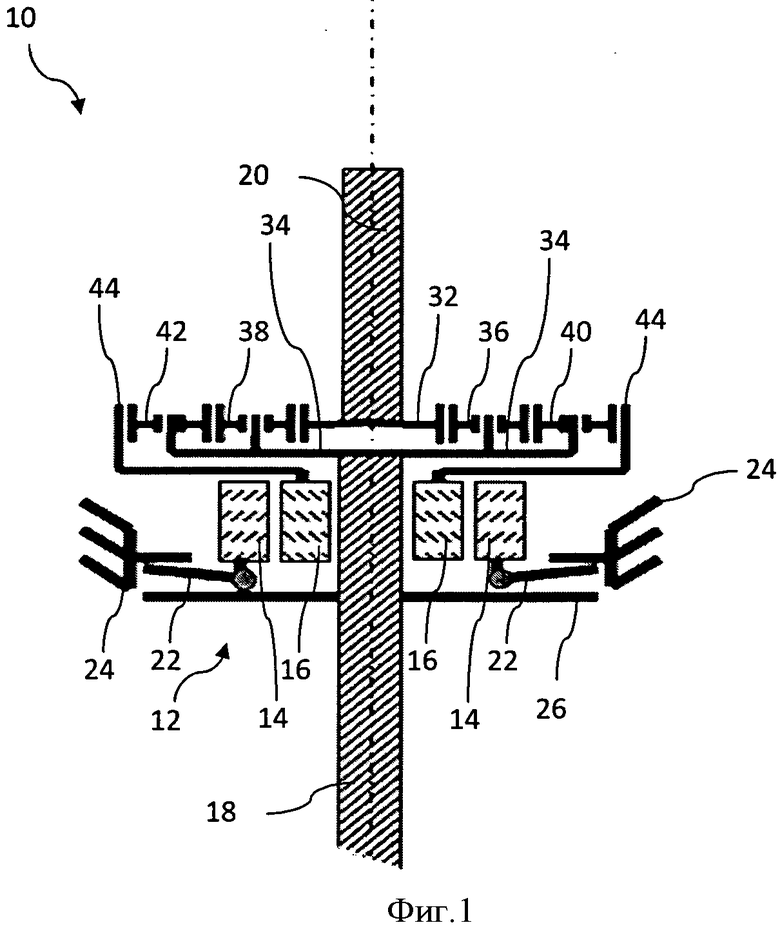
1. Приводной механизм для передачи крутящего момента, по меньшей мере, на первый ведомый элемент (18) и второй ведомый элемент (20), содержащий:
генерирующий крутящий момент привод (12), оперативно связанный с первым и вторым ведомыми элементами (18, 20), при этом привод (12) содержит первый элемент (14) и второй элемент (16), установленные с возможностью вращения относительно друг друга,
переключающий элемент (22), связанный с приводом (12), для избирательного соединения привода (12) с первым и вторым ведомыми элементами (18, 20) в режиме тяги или в векторном режиме,
переключающий элемент (22), соединенный с первым элементом (14) привода для избирательной передачи крутящего момента от генерирующего крутящий момент привода (12) первому и второму ведомым элементам (18, 20) в режиме тяги или в векторном режиме, при этом переключающий элемент (22) способен избирательно соединяться с первым ведомым элементом (18) в векторном режиме или с неподвижной корпусной деталью (24) в режиме тяги,
переключающий элемент (22) способен соединяться с первым ведомым элементом (18) посредством соединительного элемента (26), с возможностью вращения соединенного с первым ведомым элементом (18).
в режиме тяги крутящий момент привода (12) подводится к первому и второму ведомым элементам (18, 20) в одном и том же направлении, а в векторном режиме крутящий момент привода (12) подводится к первому и второму ведомым элементам (18, 20) в противоположных направлениях,
первый и второй ведомые элементы (18, 20) и привод (12) оперативно связаны с дифференциалом (30; 50), содержащим зубчатое колесо (44) с наружными зубьями, оперативно связанное со вторым элементом (16) привода, и
первый ведомый элемент (18) оперативно связан с водилом (34) планетарного дифференциала (30), а второй ведомый элемент (20) оперативно связан с солнечной шестерней (32) планетарного дифференциала (30).
2. Приводной механизм по п.1, в котором привод (12) выполнен в виде электрического двигателя, первый элемент привода выполнен в виде статора (14), а второй элемент привода выполнен в виде ротора (16).
3. Приводной механизм по п.1, в котором второй элемент (16) привода оперативно связан со вторым ведомым элементом (20).
4. Приводной механизм по п.1, в котором первый и второй ведомые элементы (18, 20) и привод (12) оперативно связаны с дифференциалом (30; 50).
5. Приводной механизм по п.4, в котором дифференциал выполнен в виде планетарного дифференциала (30), содержащего зубчатое колесо (44) с наружными зубьями, оперативно связанное со вторым элементом (16) привода.
6. Приводной механизм по п.5, в котором первый ведомый элемент (18) оперативно связан с водилом (34) планетарного дифференциала (30), а второй ведомый элемент (20) оперативно связан с солнечной шестерней (32) планетарного дифференциала (30).
7. Приводной механизм по п.6, в котором дифференциал выполнен в виде дифференциала (50) с коническими шестернями, содержащего водило (52), оперативно связанного со вторым элементом (16) привода.
8. Приводной механизм по п.7, в котором первый и второй ведомые элементы (18, 20) оперативно связаны с противоположно расположенными полуосевыми шестернями (54, 56) дифференциала (50) с коническими шестернями.
| US 6849017 B2, 01.02.2005 | |||
| Система приготовления растворов химикатов и заправки опрыскивателей | 1987 |
|
SU1491427A1 |
| СИСТЕМА ПЕРЕДАЧИ С РАЗДЕЛЕНИЕМ ПОТОКА МОЩНОСТИ С ЧЕТЫРЬМЯ ОТВОДАМИ | 2004 |
|
RU2334142C2 |
| US 2998538 A, 29.08.1961 | |||

