Изобретение относится к области транспортного машиностроения, точнее к транспортным средствам с комбинированной энергетической установкой с двумя разными типами двигателей - тепловым и электрическим, в частности к автомобилям, автобусам с различными схемами привода ведущих мостов.
Известны автомобили с комбинированной (гибридной) энергетической установкой (КЭУ), которые наряду с реализацией традиционных для гибридных автомобилей функций, позволяют улучшить проходимость автомобиля, влиять на характеристики управляемости благодаря изменению типа привода.
Известен представленный на Токийском автосалоне в 2003 году концептуальный полноприводный автомобиль Nissan Redigo (журнал «4×4 Club», №2, 2004 г., стр.18…20), содержащий два источника энергии - тепловой двигатель (ТД) и электрический узел, имеющий генератор и тяговый электродвигатель. Привод одной ведущей оси осуществляется традиционно тепловым двигателем, второй - электродвигателем через механический редуктор. Схема автомобиля Nissan Redigo позволяет улучшить проходимость автомобиля и влиять на характеристики управляемости благодаря изменению типа привода, поскольку при включении электродвигателя автомобиль переходит со схемы переднего привода колес на схему полного привода. Однако возможности влияния на характеристики проходимости и управляемости также остаются ограниченными, поскольку тип привода является подключаемым, осуществляется лишь изменение межосевого распределения мощности. Управляемое изменение пропорций распределения крутящего момента электродвигателя между колесами не осуществлено.
Известны, однако, конструкции, обеспечивающие изменение пропорций межосевого и межколесного распределения мощности ДВС посредством механических устройств.
Так согласно патенту RU 2376174 С1, 2009 г. на ряде моделей автомобилей фирмы «Mitsubishi» реализовано изменение пропорций межосевого распределения путем управляемого изменения коэффициента блокировки межосевого дифференциала, а изменение межколесного распределения крутящих моментов заднего моста осуществляется управляемым изменением кинематических характеристик межколесного дифференциала. Введение в кинематическую цепочку дифференциала промежуточных шестерен изменяет симметричное распределение крутящих моментов между колесами на несимметричное в одну или другую сторону. Решения существенно усложняют конструкцию силовой передачи автомобиля. Кроме того, изменение межколесного распределения крутящих моментов в дифференциале заднего моста носит умеренный ступенчатый характер, приемлемо в части влияния на управляемость автомобиля, но недостаточно эффективно для повышения проходимости автомобиля.
Вместе с тем, КЭУ может дать новые возможности управляемого изменения пропорций в распределении мощности.
В гибридных автомобилях по патенту US 7,195,087 B2, 2007 г. и варианту патента RU 2389617 C2, 2010 г. колеса одной оси приводятся от ДВС, а для привода колес второй оси предназначены два электродвигателя, каждый из которых имеет кинематическую связь лишь с одним колесом этой оси автомобиля (В варианте патента RU 2389617 C2 - две обратимые электрические машины).
Такое решение обеспечивает не только изменение межосевого распределения мощности путем изменения типа привода - передний привод от ДВС, задний от двух электрических машин, полный привод как комбинация двух предыдущих типов, но и изменение межколесного распределения мощности на оси с электроприводом. Тем самым расширяются функциональные возможности автомобиля в отношении проходимости и управляемости за счет реализации в нужный момент тяги одного электродвигателя на соответствующем ситуации колесе этой оси. При этом как положительный фактор отмечается возможность исключения карданного вала и межколесного дифференциала второй оси, традиционных для силовой передачи полноприводного автомобиля с приводом от ДВС. Однако этим решениям также свойственны недостатки, ограничивающие область использования:
1. Тип полного привода является подключаемым. Использование мощности электропривода реально лишь на ограниченное время, обусловленное емкостью аккумуляторных батарей. Если для трогания с места на электротяге, обеспечения курсовой коррекции емкость батарей будет достаточной, то повышение проходимости при полном приводе будет возможно или на ограниченное время, или при условии параллельной подзарядки батарей генератором, т.е. с пониженным, по сравнению с механическим, приводом колес, общим КПД автомобиля.
2. В ситуации, когда по условиям сцепления с опорной поверхностью одно из колес оси с электроприводом не может реализовать высокий крутящий момент, то момент второго электродвигателя, предаваемый на колесо с удовлетворительным сцеплением, даже в совокупности с крутящим моментом от ДВС на другой ведущей оси, может быть недостаточным для обеспечения движения автомобиля при повышенном сопротивлении движению. На оси с электроприводом в рассматриваемой ситуации используется энергетический потенциал лишь одного электродвигателя. В связи с этим решения по патенту US 7,195,087 B2 и варианту патента RU 2389617 C2 нецелесообразны для универсальных по назначению автомобилей, предназначенных для использования не только в городе, но и в сложных дорожных условиях - на заснеженных дорогах, на местности с неровным рельефом, повышенным сопротивлением движению.
Наиболее близким аналогом (прототипом) изобретения является гибридный автомобиль по патенту US 6,740,002 B1, 2004 г. Вариант исполнения по патенту предусматривает привод от ДВС на одну ось автомобиля традиционным способом в сочетании с приводом на каждое колесо этой же оси от индивидуального электродвигателя, и привод второй оси - также на каждое колесо от индивидуального электродвигателя. Возможности конструкции по этому варианту в части повышения проходимости и курсовой устойчивости более высокие. На оси с ДВС крутящий момент может быть увеличен путем дополнительного подключения электродвигателей этой оси, а изменение пропорций межколесного распределения крутящих моментов может быть увеличено при подключении электродвигателя одной стороны на каждой оси.
Вместе с тем, имеется и ряд недостатков, обусловленных недостаточным использованием потенциала возможностей КЭУ, что ограничивает использование подобного автомобиля в сложных дорожных условиях, а именно:
- тип полного привода является подключаемым с теми недостатками, что описаны для конструкции по патенту US 7,195,087 B2;
- в ситуации буксования одного из колес оси с приводом от ДВС крутящий момент ДВС не может быть реализован на небуксующем колесе - отсутствие момента сопротивления на одном колесе не позволяет передать крутящий момент ДВС на другое колесо. Это, как известно, свойство традиционного дифференциала - как с малым, так и повышенным трением. Энергетический же потенциал электродвигателя стороны буксующего колеса в этой ситуации не может быть использован - крутящий момент был бы вреден, а подключение электродвигателя небуксующего колеса для увеличения тяги может быть недостаточным. Таким образом, общая тяга на оси с ДВС обеспечивается лишь одним электродвигателем. Для дополнительного подключения тяги от ДВС потребуется применение традиционной антибуксовочной системы с тормозными механизмами на основе трения. Однако, эта система затратна с энергетической точки зрения и создает дополнительную нагрузку на тормозные механизмы.
Задачей изобретения является расширение функциональных возможностей транспортного средства с комбинированной энергетической установкой, обеспечивающее пригодность его к эксплуатации в различных дорожных и климатических условиях в сочетании со снижением энергетических затрат.
Технический результат, получаемый от реализации изобретения, заключается в улучшении характеристик проходимости и управляемости автомобиля посредством управляемого изменения межколесного распределения потоков мощности ДВС и электрических машин, в получении дополнительной экономии топлива и повышении ресурса тормозных механизмов, а также в универсальности решения в части применения для различных типов привода автомобиля - при постоянном полном приводе, при подключаемом полном приводе, в приводе на одну ось.
Для достижения технического результата в транспортном средстве с комбинированной энергетической установкой (КЭУ), содержащей тепловой двигатель и электрический узел с двумя, по меньшей мере, тяговыми электромоторами, блоки преобразования и накопления энергии, блок управления КЭУ, с силовой передачей между тепловым двигателем и колесами по меньшей мере одной ведущей оси, имеющей редуктор с главной передачей и дифференциалом, с индивидуальной (независимой) кинематической связью каждого из двух электромоторов с соответствующим колесом ведущей оси, при этом каждый электродвигатель в отдельности образует исполнительное устройство противобуксовочной системы (ПБС) и системы курсовой устойчивости (СКУ), способом действия которого является создание несимметричности сил тяги на колесах оси, согласно изобретению, по меньшей мере на одной ведущей оси с базовым силовым приводом от теплового двигателя, независимый электрический привод каждого колеса оси выполнен посредством обратимой электрической машины (ОЭМ), при этом транспортное средство имеет исполнительное устройство рекуперации энергии при замедлении ТС, образуемое совокупностью двух ОЭМ (в режиме генератора), и исполнительное устройство ПБС и СКУ, образуемое как совокупностью одной ОЭМ в режиме генератора и дифференциала ведущей оси, так и совокупностью одной ОЭМ в режиме генератора, дифференциала ведущей оси и другой ОЭМ в режиме электромотора, способом образования несимметричности сил тяги на колесах оси является создание тормозного момента в одной ОЭМ и перенос посредством дифференциала крутящего момента от ДВС, соответствующего тормозному моменту ОЭМ и коэффициенту блокировки дифференциала, на другое колесо с возможностью при этом суммирования с крутящим моментом второй ОЭМ в режиме генератора.
В частных случаях реализации изобретения дополнительные отличия состоят в том, что:
- ОЭМ выполнены в едином блоке с подрессоренным редуктором ведущей оси, геометрические оси ОЭМ смещены относительно осей выходных звеньев редуктора, а кинематическая связь каждой ОЭМ с соответствующим выходным валом редуктора осуществлена зубчатой передачей;
- обратимые электрические машины выполнены в едином блоке с подрессоренным редуктором ведущей оси, расположены на общей оси с выходными валами редуктора и имеют с ними индивидуальную кинематическую связь;
- кинематическая связь каждой ОЭМ с соответствующим выходным валом редуктора содержит соединительную муфту, позволяющую разъединять их жесткую связь;
- ОЭМ размещены на несущей системе транспортного средства, а индивидуальная кинематическая связь каждой из них с силовым приводом колеса от теплового двигателя выполняется шарнирным валом и зубчатой передачей;
- каждая ОЭМ размещена в колесе, образуя конструкцию типа «мотор-колесо», и, наряду с этим, имеет кинематическую связь с приводом этого колеса от теплового двигателя;
- электрический узел транспортного средства дополнительно содержит генератор, размещенный между тепловым двигателем и силовой передачей;
- привод от теплового двигателя и привод от двух ОЭМ выполнен лишь на одну ось транспортного средства.
Предлагаемое транспортное средство с комбинированной энергетической установкой обеспечивает возможность реализации традиционных для гибридных автомобилей положительных свойств - возможность трогания автомобиля с места с использованием тяги двух ОЭМ в режиме электродвигателей, замедление автомобиля посредством режима рекуперации кинетической энергии в двух ОЭМ, использование энергии ДВС при движении автомобиля для выработки электроэнергии в ОЭМ на режиме генераторов и подзарядки источников питания. Кроме этого, изобретение имеет ряд дополнительных существенных преимуществ:
1. Повышение проходимости автомобиля путем управляемого изменения несимметричности распределения крутящего момента на оси с приводом от ДВС, сопровождаемое снижением (исключением) нерациональных энергетических затрат, свойственных традиционным противобуксовочным системам на основе притормаживания буксующего колеса. Возможны управляющие воздействия:
- притормаживание буксующего или вывешенного колеса электрической машиной в режиме рекуперации, обеспечивающее переброс соответствующего крутящего момента ДВС на другое колесо посредством межколесного дифференциала силовой передачи, при этом работа притормаживания моментом сопротивления ОЭМ идет не на износ механизма торможения и тепловое рассеивание, как в известных ПБС, а на выработку электроэнергии;
- суммированный подвод крутящих моментов электрической машины и ДВС на колесо, имеющее запас по сцеплению с опорной поверхностью;
- совместное действие привода от ДВС и двух электрических машин, одна из которых работает в режиме притормаживания буксующего колеса, обеспечивая переброс крутящего момента ДВС на другое, отстающее колесо, имеющее запас по сцеплению с опорной поверхностью, а вторая - в режиме подвода к нему (отстающему колесу) дополнительного крутящего момента.
2. Улучшение курсовой устойчивости путем несимметричного распределения мощности в ситуации, когда система управления выявляет отклонения от заданного курса. Возможны управляющие воздействия:
- притормаживание одного колеса электрической машиной в режиме рекуперации и переброс соответствующего крутящего момента ДВС на другое колесо посредством дифференциала;
- дополнительный (к ДВС) подвод крутящего момента электрической машиной к одному колесу;
- совместное воздействие электрических машин, одна из которых работает в режиме рекуперации, притормаживая колесо, а вторая - в режиме подвода дополнительного крутящего момента на другое колесо оси;
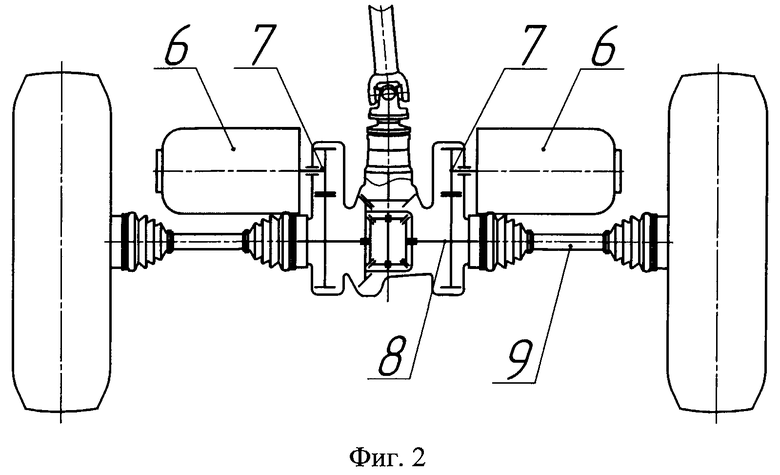
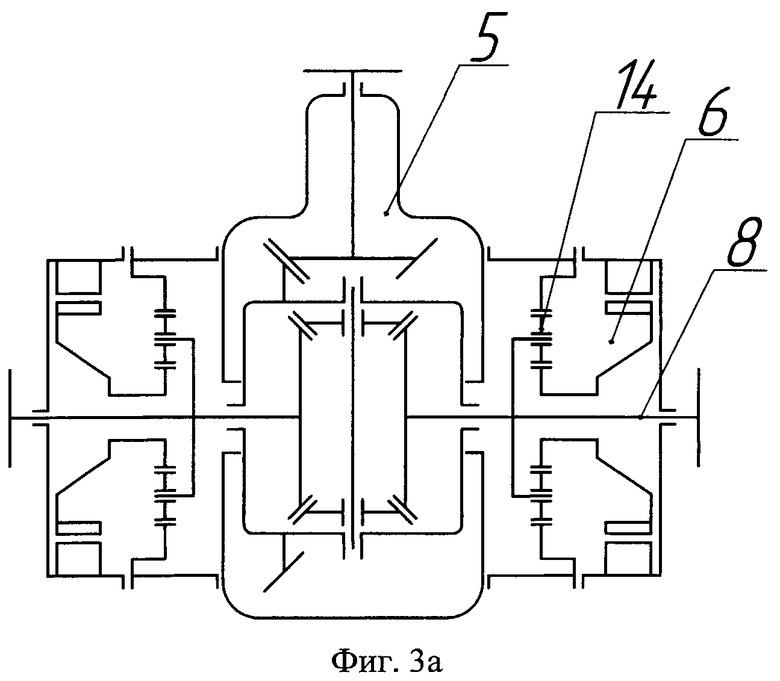
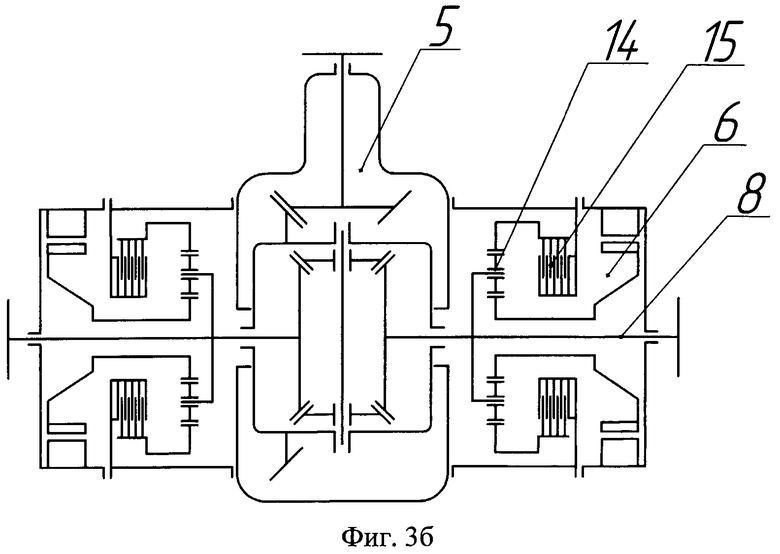
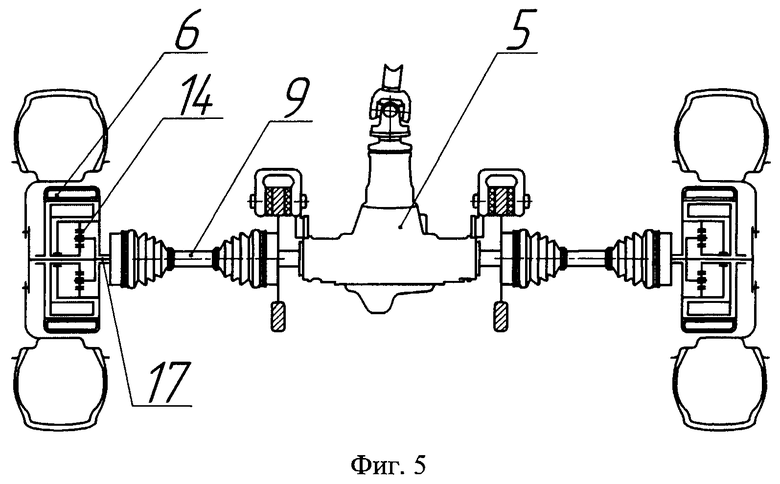
Сущность изобретения поясняется чертежами, где на фиг.1 дана, как пример исполнения, схема полноприводного автомобиля с КЭУ в варианте расположения двух ОЭМ в едином с редуктором ведущего моста подрессоренном блоке, геометрические оси ОЭМ смещены относительно осей выходных звеньев редуктора, а кинематическая связь каждой из них с валом привода соответствующего колеса осуществляется зубчатой передачей; на фиг.2 - схема ведущего моста этого варианта автомобиля; на фиг.3а - схема редуктора ведущего моста, традиционно включающего главную передачу с дифференциалом и две ОЭМ с встроенными зубчатыми передачами. ОЭМ расположены на общей оси с выходными валами редуктора и имеют с ними индивидуальную кинематическую связь; на фиг.3б - ОЭМ с встроенными зубчатыми передачами дополнительно имеют муфты, позволяющие разъединять жесткую кинематическая связь каждой ОЭМ с соответствующим выходным валом редуктора; на фиг.4 - схема ведущего моста в варианте установки двух ОЭМ на несущей системе автомобиля, а кинематическая связь каждой из них с валом привода соответствующего колеса осуществляется шарнирным валом через зубчатую передачу, установленную в картере неподрессоренного ведущего моста; на фиг.5 - схема ведущего моста с ОЭМ, установленными в колеса по схеме «мотор-колесо» и, наряду с этим, имеющими кинематическую связь с приводом этого колеса от ДВС; на фиг.6 - схема транспортного средства, КЭУ которого дополнительно содержит генератор, размещенный между ДВС и силовой передачей.
Предлагаемое транспортное средство (фиг.1, фиг.2) содержит тепловой двигатель 1, например ДВС, со сцеплением и коробкой передач 2, установленными на его выходе, раздаточную коробку 3, карданную передачу 4 привода редуктора 5 заднего моста, электрический узел из двух, по меньшей мере, обратимых электрических машин 6, зубчатые передачи 7 кинематической связи ОЭМ с соответствующими выходными валами 8 редуктора заднего моста, шарнирные валы привода задних колес 9, карданную передачу 10 привода переднего моста, блок преобразования 11, блок аккумуляторных батарей 12, блок управления КЭУ 13.
Редуктор 5 заднего моста, содержащий традиционные главную передачу и дифференциал, может быть подрессоренным (фиг.1, фиг.2, фиг.3а, фиг.3б, фиг.5) или неподрессоренным (фиг.4).
В вариантах исполнения по фиг.1, 2, 3а, 3б, 5 подрессоренный редуктор представляет агрегат, имеющий в составе две ОЭМ 6. При этом (фиг.1, фиг.2) геометрические оси ОЭМ могут быть смещены относительно осей выходных звеньев редуктора, и кинематическая связь каждой из них с соответствующим выходным валом 8 осуществлена зубчатой передачей 7, и могут быть соосны (фиг.3а, фиг.3б) выходным валам 8 редуктора 5 и иметь планетарные зубчатые передачи 14 кинематической связи ОЭМ с соответствующим валом 8. В исполнении по фиг.3б кинематическая связь каждой ОЭМ 6 дополнительно имеет соединительную муфту 15.
В варианте исполнения по фиг.4 зубчатые передачи 7 индивидуальной кинематической связи с ОЭМ расположены в картере моста и соединены с ОЭМ шарнирными валами 16.
В исполнении по фиг.5 ОЭМ 6 установлены внутри колес по схеме «мотор-колесо» и наряду с этим имеют индивидуальную кинематическую связь, непосредственно или через планетарную передачу 14, с приводом 17 этого колеса от теплового двигателя.
В исполнении по фиг.6 электрический узел транспортного средства дополнительно содержит генератор 18, размещенный между тепловым двигателем и силовой передачей.
В частных вариантах исполнения ТС могут иметь следующие различия:
- тип теплового двигателя (ТД) может быть любым - поршневой двигатель внутреннего сгорания, бензиновый или дизельный, газотурбинный, паровой;
- типом ТД может определяться тип и конструкция сцепления и коробки передач, возможен вариант гидродинамического сцепления, электромагнитного сцепления и др., коробка передач может представлять собой любого типа ступенчатую или бесступенчатую передачу - механическую ступенчатую, гидромеханическую, механическую бесступенчатую фрикционного типа и т.д.;
- привод ТС от теплового двигателя может быть осуществлен на одну ведущую ось, общую с приводом от ОЭМ.
Предлагаемое изобретение делает возможными следующие режимы работы ТС.
1. Движение с приводом на переднюю и заднюю оси:
1.1. от ТД;
1.2. от ТД и дополнительным приводом задней оси от двух ОЭМ;
1.3. от ТД и дополнительным приводом от одной ОЭМ на одно из колес задней оси;
1.4. от ТД с притормаживанием привода одного из колес соответствующей ОЭМ в режиме рекуперации;
1.5. от ТД, дополнительным приводом от одной ОЭМ на одно из колес задней оси и с притормаживанием привода другого колеса второй ОЭМ в режиме рекуперации;
1.6. от ТД и работой двух ОЭМ в режиме рекуперации;
2. Движение с приводом на заднюю ось от двух ОЭМ.
3. Замедление автомобиля:
3.1. замедление автомобиля двумя ОЭМ в режиме рекуперации;
3.2. замедление автомобиля посредством сопротивления в ТД (торможение двигателем) и двумя ОЭМ в режиме рекуперации.
Кроме того, в частном исполнении транспортного средства, предусматривающем установку генератора между ТД и силовой передачей, возможны режимы движения 1.1-1.5, 2, 3.1 и 3.2 в сочетании с активным режимом генератора, а также режим зарядки аккумуляторных батарей от ДВС на стоящем автомобиле.
Особенности работы транспортного средства поясняются на конкретном примере исполнения автомобиля с использованием ДВС, механического сцепления и механической коробки передач.
Режим 1.1 предназначен для ситуации движения, когда не требуется корректирующее воздействие со стороны ОЭМ с целью повышения проходимости автомобиля или обеспечения его курсовой устойчивости. ОЭМ 6 не задействованы, привод колес осуществляется традиционно силовой передачей и не требует пояснений.
Режим 1.2 обеспечивает повышение тяговых усилий за счет суммирования мощности ДВС 1 и двух ОЭМ 6, работающих в режиме тягового электродвигателя по сигналу от блока управления КЭУ 13, связанного с системой управления автомобилем (на схеме фиг.1 не показана). Крутящий момент каждой ОЭМ 6 суммируется с крутящим моментом ДВС следующим образом, в зависимости от варианта исполнения:
на соответствующем выходном вале 8 подрессоренного редуктора 5:
- посредством зубчатой передачи 7 (фиг.1, фиг.2, п.п.1 и 2 формулы изобретения);
- посредством планетарной передачи 14 (фиг.3а, п.п.1 и 3 формулы изобретения);
- посредством планетарной передачи 14 с соединительной муфтой 15 (фиг.3б, п.п.1, 3 и 4 формулы изобретения);
на соответствующем приводном вале колеса 17 неподрессоренного ведущего моста 5 посредством шарнирного вала 16 и зубчатой передачи 7, входящей в состав ведущего моста (фиг.4, пп.1 и 5 формулы изобретения);
на соответствующем приводном вале колеса 17, связанном шарнирным валом 9 с подрессоренным редуктором 5, посредством встроенного планетарного редуктора 14 «мотор-колеса» или непосредственно (фиг.5, пп.1 и 6 формулы изобретения).
Перечисленные кинематические связи, определяющие суммирование (с учетом знака) крутящих моментов ОЭМ и ДВС в этом режиме и обусловленные вариантом исполнения, распространяются и на описание последующих режимов работы транспортного средства.
Режим 1.3 представляет элемент системы обеспечения курсовой устойчивости автомобиля. Когда система управления распознает отклонение от заданной траектории движения, блоком управления КЭУ 13 дается команда на включение одной ОЭМ 6, соответствующей отклонению, в режим тягового электродвигателя. Тем самым на одном колесе тяга от ДВС и дополнительная тяга электродвигателя суммируются аналогично тому, как описано для режима 1.2, создается несимметричность тяговых сил по сторонам автомобиля и осуществляется коррекция траектории движения.
Режим 1.4 - привод от ДВС и притормаживание привода одного из колес соответствующей ОЭМ в режиме рекуперации, используется в двух случаях.
В первом режим является элементом системы обеспечения курсовой устойчивости автомобиля. В отличие от режима 1.3 он используется в том случае, когда система управления выбирает по условиям движения вариант коррекции со снижением силы тяги на одном из колес. Блок управления 13 дает команду на включение в соответствующей ОЭМ 6 режима рекуперации, возникшее в связи с этим сопротивление ОЭМ снимает с привода от ДВС соответствующего колеса часть крутящего момента, переводя тем самым часть энергии ДВС в электрическую для подзарядки аккумуляторных батарей 12. Крутящий момент на другом, неприторможенном колесе в этом случае равен сумме моментов сопротивления от дороги и рекуперации, при этом суммарная сила тяги автомобиля снижается на величину момента рекуперации.
Во втором случае режим предназначен для повышения проходимости автомобиля. Когда система управления распознает начало буксования одного из колес, блоком управления 13 дается команда на притормаживание привода этого колеса включением рекуперации в ОЭМ 6, имеющей кинематическую связь с этим приводом. Сниженный из-за недостатка сцепления момент сопротивления на буксующем колесе восполняется моментом сопротивления в ОЭМ, работающей в режиме рекуперации. Наличие межколесного дифференциала обеспечивает возможность передачи на небуксующее колесо дополнительного крутящего момента ДВС, соответствующего реализуемому моменту рекуперации и коэффициенту блокировки дифференциала.
Режим 1.5 используется для повышения проходимости автомобиля в ситуации, когда одно из колес начинает буксовать или даже оказывается в вывешенном состоянии, а для движения автомобиля требуется повышенная тяга из-за высокого сопротивления движению. Блок управления 13 дает команду на притормаживание привода буксующего колеса включением рекуперации в ОЭМ 6, имеющей кинематическую связь с этим приводом, и на включение режима электродвигателя во второй ОЭМ. Тем самым на колесе с лучшим состоянием опорной поверхности реализуется суммирование крутящих моментов ДВС, ОЭМ в режиме электродвигателя и дополнительного момента ДВС, соответствующего моменту рекуперации другой ОЭМ.
Режим 1.6 используется в движении автомобиля при необходимости подзарядки аккумуляторных батарей 12. Блок управления 13 переводит две ОЭМ 6 в режим генератора и увеличивает подачу топлива в ДВС для компенсации возросших затрат мощности для движения автомобиля в связи с необходимостью преодоления сопротивления ОЭМ в режиме генератора.
Режим 2 - движение с приводом на заднюю ось от двух ОЭМ 6, важен и эффективен с экологической точки зрения в условиях городского цикла, когда целесообразно выключение ДВС на остановках и последующее трогание автомобиля с места на электрической тяге. Режим целесообразен также при медленном движении автомобиля в условиях дорожных пробок, когда затраты мощности на движение невелики и емкость аккумуляторных батарей 12 может обеспечить приемлемый пробег без запуска ДВС. Индивидуальная кинематическая связь ОЭМ 6 с приводом колес (в зависимости от варианта исполнения) позволяет при необходимости по команде системы управления реализовать несимметричность сил тяги по сторонам автомобиля.
Режим 3.1 обеспечивает замедление автомобиля без использования тормозного управления. При необходимости замедления система управления автомобилем через блок управления КЭУ 13 дает команду на включение режима рекуперации в двух ОЭМ 6 с той интенсивностью, которая соответствует заданному замедлению. Тем самым часть энергии движения автомобиля используется для подзарядки аккумуляторных батарей 12. ДВС при этом отсоединяется от силовой передачи традиционным способом.
Режим 3.2 по сравнению с режимом 3.1 используется тогда, когда требуется большая интенсивность замедления и по условиям движения ДВС не может быть разъединен с силовой передачей. Сопротивление движению создается посредством сопротивления в ДВС (торможение двигателем) и в двух ОЭМ 6, переведенных в режим рекуперации.
В частном исполнении, когда электрический узел имеет дополнительный генератор 18, в режимах движения 1.1-1.5, 2, 3.1 и 3.2 при необходимости зарядки аккумуляторных батарей 12 система управления переводит генератор 18 в активный режим выработки электроэнергии. В этом исполнении непосредственная связь ДВС и генератора 18 позволяет при зарядке аккумуляторных батарей в движении освободить силовую передачу и колеса автомобиля от переноса мощности ДВС к ОЭМ 6, соответственно повышая КПД автомобиля. Вместе с тем, наличие ОЭМ 6 позволяет при необходимости замедления автомобиля осуществлять в них режим рекуперации энергии, не прибегая к передаче мощности к генератору 18 через силовую передачу автомобиля. Исполнение с дополнительным генератором 18 позволяет также заряжать аккумуляторные батареи 12 от ДВС на стоящем автомобиле при нейтральной передаче в КП 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ВЕДУЩИХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА С РАСШИРЕННЫМИ ФУНКЦИОНАЛЬНЫМИ ВОЗМОЖНОСТЯМИ | 2014 |
|
RU2558405C1 |
| СОЕДИНИТЕЛЬНО-ТРАНСФОРМИРУЮЩЕЕ УСТРОЙСТВО КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2606652C1 |
| КОМБИНИРОВАННАЯ ЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА ПОЛНОПРИВОДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2312030C2 |
| Гусеничная машина | 2019 |
|
RU2710511C1 |
| Гусеничная машина | 2019 |
|
RU2711105C1 |
| Транспортное средство с гибридной силовой установкой | 2018 |
|
RU2701282C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО РЕКУПЕРАЦИИ ЭНЕРГИИ ТОРМОЖЕНИЯ | 2012 |
|
RU2488501C1 |
| Четырехгусеничное шасси | 2022 |
|
RU2798151C1 |
| ГИБРИДНЫЙ МЕХАНИЗМ РАСПРЕДЕЛЕНИЯ МОЩНОСТИ В ТРАНСМИССИИ ТРАНСПОРТНОЙ МАШИНЫ | 2017 |
|
RU2658486C1 |
| ТРЕХОСНЫЙ АВТОМОБИЛЬ С КОМБИНИРОВАННОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2013 |
|
RU2537931C1 |


Изобретение относится к области транспортного машиностроения и предназначено для транспортных средств с комбинированными энергетическими установками. Комбинированная энергетическая установка содержит тепловой двигатель, электрические машины, блоки преобразования и накопления энергии, блок управления, исполнительное устройство рекуперации энергии, исполнительное устройство противобуксовочной системы и системы курсовой устойчивости. Независимый электропривод каждого колеса оси выполнен посредством обратимой электрической машины. Исполнительное устройство рекуперации энергии образовано совокупностью двух обратимых электрических машин в режиме генератора. Исполнительное устройство противобуксовочной системы и системы курсовой устойчивости образовано совокупностью обратимой электрической машины в режиме генератора и дифференциала ведущей оси, а также совокупностью обратимой электрической машины в режиме генератора, дифференциала ведущей оси и другой обратимой электрической машины в режиме электромотора. Технический результат заключается в повышении проходимости, устойчивости и управляемости автомобиля при снижении энергетических затрат в исполнительных механизмах противобуксовочной системы и системы курсовой устойчивости. 6 з.п. ф-лы, 7 ил.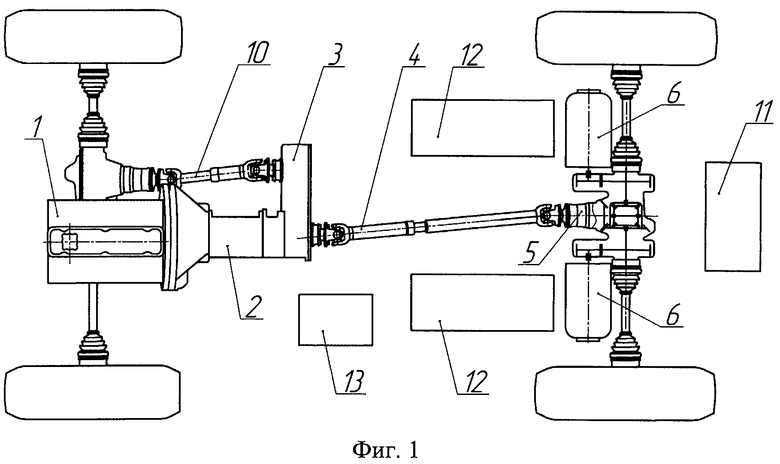
1. Транспортное средство с комбинированной энергетической установкой расширенных функциональных возможностей, содержащей тепловой двигатель и электрический узел с двумя, по меньшей мере, тяговыми электромоторами, блоки преобразования и накопления энергии, блок управления комбинированной энергетической установки, с силовой передачей между тепловым двигателем и колесами по меньшей мере одной ведущей оси, имеющей редуктор с главной передачей и дифференциалом, с индивидуальной (независимой) кинематической связью каждого из двух электромоторов с соответствующим колесом ведущей оси, при этом каждый электродвигатель в отдельности образует исполнительное устройство противобуксовочной системы и системы курсовой устойчивости, способом действия которого является создание несимметричности сил тяги на колесах оси, отличающееся тем, что по меньшей мере на одной ведущей оси с базовым силовым приводом от теплового двигателя независимый электрический привод каждого колеса оси выполнен посредством обратимой электрической машины, при этом транспортное средство имеет исполнительное устройство рекуперации энергии при замедлении транспортного средства, образуемое совокупностью двух обратимых электрических машин в режиме генератора, и исполнительное устройство противобуксовочной системы и системы курсовой устойчивости, образуемое как совокупностью одной обратимой электрической машины в режиме генератора и дифференциала ведущей оси, так и совокупностью одной обратимой электрической машины в режиме генератора, дифференциала ведущей оси и другой обратимой электрической машины в режиме электромотора, способом образования несимметричности сил тяги на колесах оси является создание тормозного момента в одной обратимой электрической машине и перенос посредством дифференциала крутящего момента от ДВС, соответствующего тормозному моменту обратимой электрической машины и коэффициенту блокировки дифференциала, на другое колесо с возможностью при этом суммирования с крутящим моментом второй обратимой электрической машины в режиме генератора.
2. Транспортное средство по п.1, отличающееся тем, что обратимые электрические машины выполнены в едином блоке с подрессоренным редуктором ведущей оси, геометрические оси обратимых электрических машин смещены относительно осей выходных звеньев редуктора, а кинематическая связь каждой обратимой электрической машины с соответствующим выходным валом редуктора осуществлена зубчатой передачей.
3. Транспортное средство по п.1, отличающееся тем, что обратимые электрические машины выполнены в едином блоке с подрессоренным редуктором ведущей оси, расположены на общей оси с выходными валами редуктора и имеют с ними индивидуальную кинематическую связь.
4. Транспортное средство по пп.1 и 3, отличающееся тем, что кинематическая связь каждой обратимой электрической машины с соответствующим выходным валом редуктора содержит соединительную муфту, позволяющую разъединять их жесткую связь.
5. Транспортное средство по п.1, отличающееся тем, что обратимые электрические машины размещены на несущей системе транспортного средства, а индивидуальная кинематическая связь каждой из них с силовым приводом колеса от теплового двигателя выполняется шарнирным валом и зубчатой передачей.
6. Транспортное средство по п.1, отличающееся тем, что каждая обратимая электрическая машина размещена в колесе, образуя конструкцию типа «мотор-колесо», и, наряду с этим, имеет кинематическую связь с приводом этого колеса от теплового двигателя.
7. Транспортное средство по п.1, отличающееся тем, что электрический узел дополнительно содержит генератор, размещенный между тепловым двигателем и силовой передачей.
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С НЕЗАВИСИМЫМ ПРИВОДОМ МОДУЛЕЙ КОЛЕС | 2006 |
|
RU2389617C2 |
| ПОЛНОПРИВОДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2005 |
|
RU2290328C1 |
| EP 1352775 A2, 15.10.2003 | |||
| US 6740002 B1, 25.05.2004. | |||

