Изобретение относится к области транспортного машиностроения и может быть использовано в конструкции колесных полноприводных автотранспортных средств.
Целями предлагаемого изобретения являются повышение курсовой устойчивости и безопасности скоростного непрямолинейного движения в нормальных дорожных условиях и маневренности в сложных дорожных условиях при пониженной скорости движения колесных полноприводных АТС.
Курсовая устойчивость, обеспечивающая безопасность скоростного непрямолинейного движения АТС и его маневренность в сложных дорожных условиях при невысокой скорости прежде всего связаны с возможностью трансмиссии автомобиля рационального распределения крутящих моментов между ведущими колесами в соответствиями с условиями непрямолинейного движения: центростремительного ускорения, зависимого от скорости и кривизны траектории движения, а также величины и соотношения коэффициентов сцепления и сопротивления качению внутренних и наружных колес, зависимых от наличия и вида дорожного покрытия, а при его отсутствии, от состава грунта.
В настоящее время на автомобилях (4к4) основными механизмами распределения крутящих моментов в трансмиссии легковых автомобилей являются межосевой и межколесные дифференциалы с режимами частичной или полной блокировки, дополняемые электронными системами курсовой устойчивости "ESP" или ее аналогом "VSA", в которых для перераспределения крутящих моментов используется исполнительный механизм системы "ABS" для подтормаживания ведущих колес.
Более простой является система "AYC" фирмы Mitsubishi. [1], которая устанавливается в заднем ведущем мосту. Между ведомой шестерней главной пары и одной из полуосей колес этого ведущего моста включен двухступенчатый редуктор с повышающей и понижающей передачами при небольшой и симметричной разнице относительно единицы передаточного отношения. При повороте автоматически включается повышающая или понижающая передача в зависимости от направления поворота, при этом дифференциальная связь блокируется. Превышение задаваемой разности частоты вращения колес относительно разности их фактической скорости движения, зависимой от радиуса поворота, обеспечивает перераспределение крутящих моментов задних колес от замедляющегося колеса к ускоряющемуся. При этом по мере снижения радиуса поворота и увеличения относительной разности частоты вращения наружного и внутреннего задних колес возникающая разность крутящих моментов и активный поворачивающий момент относительно вертикальной оси АТС увеличивается. За счет этого компенсируется момент сопротивления повороту АТС, который в нормальных дорожных условиях вызван прежде всего более высоким сопротивлением качению ускоряющихся наружных колес вследствие их большей весовой нагрузки при повороте в сравнении с замедляющимися внутренними. Эта система компенсирует "недостаточную" поворачиваемость АТС при передаточных отношениях редуктора, например, 1.05 и 0.95 в диапазоне изменения радиуса поворота 100 м … 200 м. Однако в случае "избыточной" поворачиваемости АТС при наличии поворачивающего момента, например, из-за более высокого сопротивлению качению внутренних колес в сравнении с наружными при повороте на грунтовой дороге, эта система может вызвать боковой занос задней оси и дестабилизировать движение АТС. Фиксированные передаточные отношения редуктора не позволяют получить необходимого эффекта в широком диапазоне изменения радиуса поворота и при меняющихся характеристиках дорожного полотна.
Аналогичную задачу решает система "SH - AWD" [2] фирмы Honda. Вместо межосевого дифференциала трансмиссия содержит двухступенчатый редуктор с ускоряющими передачами, увеличивающими среднюю частоту вращение задних колес 1.7% и 5.7%, и электромагнитной многодисковой муфтой с регулируемой величиной передаваемого момента. В заднем ведущем мосту вместо межколесного дифференциала установлены два планетарных однорядных редуктора, которые передают крутящие моменты на задние полуоси через аналогичные, указанной выше, электромагнитные многодисковые муфты. Система обеспечивает распределение крутящих моментов между передним и задним ведущими мостами и между наружным и внутренним задними колесами в соответствии с задаваемыми режимами движения: "спокойное" прямолинейное движение на шоссе, "спокойное", замедленное и ускоренное движение при повороте, "активное маневрирование" и режим разгона. Относительная величина крутящего момента, передаваемая на заднюю ось меняется от 10% при прямолиейном движении до 70% при повороте, а на наружное заднее колесо - от 50% до 100% при повороте. В режиме ускоренного движения при повороте заднее наружное колесо ускоряет на 5.7% частоту вращения относительно средней частоты вращения передних колес и весь передаваемый на привод заднего ведущего моста крутящий момент реализуется одним наружным колесом, внутреннее колесо отключено. Таким образом компенсируется "недостаточная" поворачиваемость. Эта система работает совместно с электронной системой курсовой устойчивости "VCA", которая за счет подтормаживания переднего наружного колеса компенсирует "избыточную" поворачиваемость.
Электронная система курсовой устойчивости, система "ESP" [3], применяемая на современных автомобилях, Daimler-Benz, BMW и др. содержит датчики частоты вращения колес, угла поворота управляемых колес, продольного и центростремительного ускорения, угловой скорости и углового ускорения поворта остова автомобиля. Информация этих датчиков поступает в блок управления, и когда текущие значения измеряемых ускорений, угла и угловой скорости поворота остова достигают заложенных в программе управления "критических" значенй, не соответствующих заданной водителем скорости движения и углу поворота управляемых колес, осуществляется дискретное подтормаживание либо внутреннего заднего колеса при "недостаточной" поворачиваемости, либо наружного переднего колеса при "избыточной" поворачиваемости. Таким образом, система реагирует только на "критическое" отклонение автомобиля от заданного курса и потому действие этой системы имеет прерывистый дискретный характер. Эта система вступает в действие только тогда, когда такие нарушение фиксируются датчиками ускорений и угла и угловой скорости поворота автомобиля. Из-за ограниченной их разрешающей способности они способны измерять указанные параметры только в динамике переходного процесса отклонения автомобиля от заданного курса, величина которых в несколько раз превышает их величину в режиме установившегося кругового движения автомобиля. Фактически эта система реагирует с запаздыванием. Подобные системы автоматического регулирования в теории регулирования [4] называются прерывистыми.
Гораздо больший эффект при меньших затратах энергии как двигателя, так и водителя за рулем автомобиля мог бы быть достигнут использованием системы автоматического регулирования непрерывного действия, поддерживающей задаваемый регулируемый параметр, который бы соответствовал оптимальной управлаемости автомобиля, при которой в широком диапазоне скоростей вне зависимости от дорожных условий и от кривизны траектории движения поддерживалось бы, по меньшей мере, незначительная положительная разность углов бокового увода передней и задней оси колес. При этом требуется более экономичный в сравнении с механизмом системы "ABS" исполнительный механизм для формирования стабилизирующей разности крутящих моментов наружных и внутренних колес.
Альтернативное решение этой проблемы для АТС с механической трансмиссией представлено в патенте №2706681 RU, являющегося наиболее близким аналогом [5] предлагаемого изобретения. В основу указанного патента положена трансмиссия, в ведущих мостах и раздаточной коробке которой, установлены дифференциальные механизмы, позволяющие в режиме блокировки бесступечато регулировать разность частоты вращения их выходных звеньев с помощью гидравлического привода небольшой мощности, с системой автоматического регулирования непрерывного действия, работающей в двух режимах, один из которых должен обеспечивать курсовую устойчивость непрямолинейного высокоскоростного движения АТС и в сложных дорожных условиях при малых радиусах поворота улучшить маневренность.
В этом режиме - поперечной стабилизации движения - стабилизирующая разность крутящих моментов наружных и внутренних колес обеспечивается за счет изменения разности их частоты вращения и перераспределения скоростных потерь, связанных с тангенциальной эластичностью шин. При этом формируется соответствующий стабилизирующий поворачивающий момент отностельно вертикальной оси АТС. Такой способ формирования стабилизирующего момента на порядок экономичнее в сравнении с вышеуказанным подтормаживанием колес в системе ESP, поскольку мощность, теряемая в дифференциальном механизме пропорциональна разности частоты вращения колес.
.Каждый дифференциальный механизм содержит два однорядных планетарных механизма, ведомыми звеньями которых у межколесных дифференциальных механизмов в ведущих мостах (МКДМ) являются водила и у межосевого (МОДМ) в раздаточной коробке -коронные шестерни, и вал дифференциальной связи, Этот вал посредством двух понижающих пар цилиндрических шестерен, одна из которых содержит паразитную шестерню, с одинаковым передаточным отношением кинематически связан с солнечными шестернями обоих планетарных механизмов и обеспечивает разнонапрвленное их вращение. А хвостовик этого вала соединен с валом реверсивной объемной гидромашины героторного или ге-роллерного типа. При "недостаточной" поворачиваемости гидромашины МКДМ работают в ведущем режиме гидромотора от внешнего источника энергии, а при "избыточной" - в ведомом режиме насоса от более нагруженного колеса. Объемные гидромашины МКДМ и МОДМ включены в трехконтурную гидравлическую систему с питанием от гидроаккумулятора, снабженного автоматом зарядки от гидронасоса небольшой производительности. Для бесступенчатого регулирования частоты вращения входные магистрали гидромашин, работающих в ведущем режиме и их выходные магистрали в случае ведомого режима работы соединены с электроуправляемыми дроссельными регуляторами расхода. Для исключения кавитации во входной полости гидромашин, работающих в режиме насоса, рабочая жидкость в эти полости поступает из сливной магистрали, в которой посредством подпорного клапана поддерживается небольшое избыточное давление 0.2…0.3 МПа. При свободном вращении гидромашин межколесная дифференциальная связь разблокирована, а при регулируемом вращении - блокирована.
Вал дифференциальной связи в раздаточной коробке выполнен разрезным из двух секций и снабжен зубчатой соединительной муфтой с ручным переключением. При разъединении его передней и задней секции привод задних колес отключается, дроссельный регулятор потока гидромашины МОДМ автоматически перекрывается, блокируя ее вращение.
Система автоматического управления (САУ) содержит три контура управления, в которых посредством вышеуказанных регуляторов расхода обеспечивается индивидуальное регулирование расхода рабочей жидкости и частоты вращения гидромашин. САУ снабжена датчиками частоты вращения колес, датчиками угла поворота передних управляемых колес, датчиком угловой скорости поворота (гироскопом) и двумя двухкомпонентными акселерометрами, расположенными над центральными точками передней и задней оси колес. Оси чувствительности акселерометров направлены параллельно и перпендикулярно продольной оси АТС. Трансмиссия снабжена также датчиками, фиксирующими включение передачи заднего хода в в коробке передач, торможение АТС и отключение заднего привода в раздаточной коробке, а гидравлическая система снабжена датчиками давления на входе и выходе каждой гидромашины и реле давления в гидроакумуляторе и сливной магистрали.
В исходном режиме контуры САУ функционируют, как следящие системы, которые должны приводить в соответствие регулируемую разность частоты вращения наружных и внутренних колес для каждой ведущей оси с разницей пути, проходимого соответствующими наружными и внутренними колесами, а также регулируемую разность средней частоты вращения передних и задних колес с разницей пути, проходимого передней и задней осью колес. В вычислительном блоке на основе показаний указанных датчиков определяются приближенные значения радиусов траекторий движения колес и центральных точек передней и задней оси. По этим данным для каждой ведущей оси вычисляется необходимая относительная разность действительной скорости наружного и внутреннего колеса, а также относительная разность действительной скорости движения передней и задней оси АТС. Текущие значния указанных аналоговых величин используются в качестве основных составляющих управляющих сигналов в соответствующих контурах управления, а в качестве сигналов отрицательных обратных связей - текущие значения относительной разности частоты вращения соответствующих наружных и внутренних колес и относительной разности средней частоты вращения колес передней и задней оси.
В вычислительном блоке определяются углы бокового увода передней и задней оси колес, как соотношения соответствующих продольных и поперечных компонент центростремительного ускорения, измеряемых двухкомпонентными акселерометрами, а также их средняя величина. При превышении заданного граничного значения последней, автоматически включается второй режим САУ - режим поперечной стабилизации движения. Предусмотрено и принудительное ручное включение этого режима управления. В этом режиме каждый контур САУ функционирует, как автоматический регулятор. Регулируемым пара-метором εψ является соотношение углов бокового увода передней и задней оси, который посредством изменения частоты вращения соответствующей гидромашины поддерживает в заданном диапазоне, например, 1.03…1.1. Внутри этого диапазона исключается как "избыточная" и "нейтральная", так и ограничивается уровень "недостаточной" поворачиваемости АТС.
В электронном блоке управления определяется разность текущих и указанных выше пороговых значений соотношения углов бокового увода передней и задней оси. εψ, При отсутствии нарушения указанных граничных значений в контуры САУ передаются только основные составляющие входных сигналов и САУ работает в исходном режиме В случае нарушений заданных граничных значений текущие отрицательные значения отклонения параметра εψ от нижнего порогового значения ΔεψH в качестве ошибки регулирования Δεψ1 передается в контуры САУ переднего МКДМ и МОДМ, а положительные значения отклонения этого параметра от верхнего порогового значения Δεψв в качестве ошибки регулирования Δεψ2 - в контуры САУ заднего МКДМ и МОДМ.. Текущие значения этих этих ошибок являются дополнительными составляющими управляющих сигналов. После усиления в контурах САУ они суммируются с основными составляющими входных сигналов. За счет отрицательных значений Δεψ1 суммарные управляющие сигналы ε∑0, ε∑1 в контурах САУ переднего МКДМ и МОДМ и частота вращения их гидромашин, работающих в режиме насоса, уменьшаются, а за счет положительных значений Δεψ2 суммарные управляющие сигналы ε∑0, ε∑2 в контурах САУ заднего МКДМ и МОДМ и частота вращения их гидромашин, работающих в режиме мотора, увеличивается при снижении текущих ошибок регулирования до уровня статических ошибок САУ. Указанное изменение частоты вращения гидромашин МОДМ и соответствующей разности средней частоты вращения передних и задних колес имеет целью тяговую разгрузку переднего ведущего моста в первом случае и заднего ведущего моста во втором для повышения запаса сцепления при формировании стабилизирующей разницы крутящих моментов на колесах ведущих мостов.
При отключении заднего привода АТС благодаря датчику, фиксирующего это отключение, и четырехконтактному реле в электронном блоке управления указанные выше ошибки регулирования и Δεψ1, и Δεψ2 поступают только в задний МКДМ, контур САУ переднего МКДМ работает в исходном режиме. В первом случае гидромашина заднего МКДМ работает в ведомом режиме гидронасоса, уменьшая разность частоты вращения задних колес, а во втором - в ведущем режиме гидромотора, увеличивая эту разность.
Автоматическая смена режима работы гидромашин осуществляется индивидуально посредством электроуправлемых двухпозиционных четырехходовых золотников. Для управления переключением каждого из них электронный блок управления содержит релейное звено в котором формируются два релейных сигнала, первый из которых для перевода гидромашины из ведомого режима работы в ведущий и второй - для перевода гидромашины из ведущего в ведомый режим работы. Первый из них равен единице при снижения положительной величины перепада давления между выходной и входной полостями гидромашины до заданного нижнего граничного значения, равного перепаду давления на регулирующем клапане регулятора потока при максимальной частоте холостого вращения гидромашины, и при условии положительной величины углового ускорения поворота АТС. После переключения гидромашины в ведущий режим работы величина перепада давления меняет знак на отрицательный. Второй релейный сигнал для обратного переключения равен единице при нулевом перепаде указанного давления и при условии отрицательной величине углового ускорения поворота АТС.
Гидравлическая система содержит три двухпозиционных двухходовых электроуправляемых золотника, предназначенными для выключенния САУ и общей разблокировки межосевой и межколесных дифференциальных связей. Одновременное выключение соленоидов указанных золотников может осуществляться либо ручной кнопкой управления, либо автоматчески по сигналу датчика перемещения тормозной педали.
Для изменения направления вращения гидромашин МКДМ при изменении направления поворота АТС, а также изменения направления вращения всех трех гидромашин при включении передачи заднего хода гидавлическая система кроме упомянутых выше двухпозиционных золотников с электроуправлением снабжена также электроуправляемыми двухпозиционными четырехходовыми золотниками реверса. Включение этого золотника для гидромашины МОДМ происходит по сигналу датчика включения передачи заднего хода, а для гидромашин МКДМ одновременное включение этих золотников происходит либо только при смене направления поворота, например, с правого на левый, либо только по сигналу указанного датчика.
Релейные сигналы, управляющие переключением перечисленных золотников формируются в блоке электронного управления посредством релейных звеньев и логических преобразований.
В электронном блоке управления формируются также релейные сигналы, при равенстве единице прпредупреждающие о неисправности гидравлической системы и о превышении допустимой для текущих условий скорости движения, которые передаются на пульт управления и вызывают включение соответствующих красных световых индикаторов. Сигнал превышения скорости движения определяется логической суммой двух релейных сигналов превышения величин углов бокового увода передней и задней оси заданного предельного значения.
Однако рассмотренное устройство [5] с двухрежимной САУ в режиме поперечной стабилизации движения не позволяет эффективно решить поставленную задачу повышения курсовой устойчивости и безопасности скоростного непрямолинейного движения в нормальных дорожных условиях и маневренности в сложных дорожных условиях при пониженной скорости движения АТС (4к4) в силу ряда недостатков принципиального и практического характера.
Предлагаемое совмещение режима поперечной стабилизации движения АТС для отключаемого заднего ведущего моста с "исходным" режимом работы САУ для неотключаемого переднего ведущего моста в условиях движения на автотрассах со скростью до 110…130 км/час не актуально. Вследствие того, что радиус закруглении на таких автотрассах более 500 м, при ширине колеи колес АТС относительная кривизна траектории (отношение ширины колеи к радиусу поворота) центральной точки передней оси колес и соответствующая необходимая относительная величина разности частоты вращения передних колес не превысит 0.0032, а максимальная угловая скорость поворота АТС - 3.5°/с. И в этом случае требование к точности определения относительной кривизны траектории движения, в соответствие с которой в "исходном" режиме САУ задается разность частоты вращения колес переднего ведущего моста, ужесточаются. Применяемые сейчас гироскопические датчики не способны достаточно точно измерять угловую скорость поворота в диапазоне 2.5°/с…3.5°/с. Предлагаемый метод определения углов бокового уводов на основе вычисления соотношений продольной и поперечной компонент центростремительного ускорения, измеряемого расположенными над центральными точками передней и задней осей колес двухкомпонентными акселерометрами, оси чувствительности которых направлены параллельно и перпендикулярно продольной оси АТС, не пригоден из-за высокой относительной погрешности подобного "косвенного измерения" этих углов. При вариации углов бокового увода от нуля до предельного значения 7…8° величина соотношения измеряемых компонент, определяющего, например, угол бокового увода оси задних колес, будет изменяться от нуля до 0.039…0.044. Относительная погрешность, вычисления, соотношения j2x/j2y, равного углу бокового увода задней оси колес определяется из выражения: δ2=Δj*(1/j2x+1/j2y), где Δj - абсолютная ошибка измерения акселерометром обеих компонент ускорения. При предельно допустимой величине угла бокового увода 7° продольная компонента j2x=0.122 j, а поперечная j2y=0.9925 j. В этом самом благоприятном случае δ2=9.213 * Δj/j. А при малой величине, например, при 2° - δ2=29.66 Δj/j. То-есть относительная ошибка этого косвенного измерения угла бокового увода задней оси колес на порядок превышает относительную погрешность акселерометра.
Использование в режиме поперечной стабилизации движения АТС, в котором САУ работает подобно автоматическому регулятору, в качестве регулируемого параметра соотношения углов бокового увода передней и задней оси колес без учета соответствующего заданного водителем угла бокового увода передней оси колес неоправдано. Как известно, показатель чувствительности АТС к повороту, используемый для оценки управляемости, равен отношению εψ приращений угловой скорости поворота АТС и угла поворота управляемых колес. Величина этого показателя очень чувствительна к изменению εψ и в пределах предлагаемых граничных значений изменяется в несколько раз. А использованию фиксированной величина задаваемого εψ препятствует при предлагаемом методе чрезмерная погрешность определения углов бокового увода задней и передней оси колес. Прямое измерение угловой скорости поворота с необходимой точностью при указанной выше малой кривизне траектории пока невозможно.
Использование для тяговой разгрузки ведущего моста с регулируемым МКДМ соответствующего изменения разности средней частоты вращения передних и задних колес посредством регулируемого МОДМ в раздаточной коробке прежде всего неоправдано, если не ставится задача повышения проходимости АТС в экстремальных, в т.ч. внедорожных, условиях эксплуатации. Это - усложнение и удорожание трансмиссии. В режиме поперечной стабилизации скоростного движения АТС привод регулируемого моста проще отключать.
Компенсация возможной избыточной поворачиваемости АТС только за счет работы гидромашины переднего МКДМ в ведомом режиме гидронасоса, при которой частота вращения внутреннего колеса не может превысить частоту вращения наружного, при указанной выше малой относительной кривизне траектории движения за счет только передних колес недостаточна. Даже при полной блокировке переднего МКДМ из- за незначительной относительной кривизны траектории движения 0.0032 перераспределение коэффициента скоростных потерь ±0.16% передних колес не вызовет сколь нибудь значимого перераспределения крутящих моментов передних колес.
При регулировании стабилизирующей разности крутящих моментов внутреннего и наружного передних колес в ведомом режиме работы гидромашины и при малой или близкой к нулю ее частоты вращения за счет регулирования пропускной способности регулятора расхода на выходе гидромашины возникает проблема устойчивой работы САУ. Она связана с нелинейностью расходной характеристики регулятора при близкой к нулю величине расхода..
Решение поставленных задач достигается установкой в заднем ведущем мосту межколесного дифференциального механизма (МКДМ) с регулируемой дифференциальной связью и разностью либо частоты вращения, либо крутящих моментов задних колес посредством объемной реверсируемой и обратимой гидромашины, работающей в зависимости от знака разности крутящих моментов и разности частоты вращения наружного и внутреннего при повороте АТС задних колес либо в ведущем режиме гидромотора с регулируемой частотой в обоих направления вращения, либо в ведомом режиме гидронасоса с регулироваемым давлением на выходе гидромашины и регулируемым блокирующим моментом посредством дроссельного регулятора расхода и переливного клапана, соответственно, с пропорциональным электроуправлением, подключенной посредством двухпозиционных электроуправляемых золотников, двухходового золотника включения управляемой блокировки МКДМ и двух четырехходовых - золотника управления режимом работы гидромашины и золотника реверса гидромашины, к гидравлической системе с питанием от пневмогидроаккумулятора при автоматической подзарядке, установкой в переднем отключаемом ведущем мосту - конического межколесного блокируемого дифференциала (МКД), снабженного блокирующей фрикционной муфтой, гидроподжимной механизм которой посредством двухпозиционного электроуправляемого трехходового золотника соединяется либо со сливной магистралью, либо с выходом подключенного к гидравлической системе редукционного клапана с пропорциональным электроуправлением, установкой в раздаточной коробке - конического межосевого дифференциала (МОД), блокируемого посредством трехпозиционной зубчатой муфты с синхронизаторами в нейтральном положении, и обеспечивающей в крайних положениях разблокировку МОД и отключение переднего привода, которая установлена на промежуточном валу между двух с зубчатыми венцами и одинаковым числом зубьев ведущих шестерен зубчатых пар, одна из ведомых шестерен которых установлена на ведущем валу заднего привода, а другая жестко связана с корпусом МОД, и гидроуправляемого посредством двухпозиционных электроуправляемых четырехходового и трехходового золотников механизма переключения, обеспечивающего наряду с ручным управлением автоматическое включение и отключение полного привода с блокированным и с разблокированным МОД; применением САУ режимами работы указанных выше дифференциалов, обеспечивающей наряду с дискретным управлением указанными двухпозиционными золотниками, аналоговое управление исполнительными механизмами - указанными выше гидравлическими клапанами, регулирующими давление, и дроссельным регулятором расхода, которая при прямолинейном движении и отсутствии центростремительного ускорения в центральной точке задней оси или при малой его величине в случаях входа и выхода АТС из поворота, не превышающей заданной пороговой величины, например 0.15 g, работает как следящая система управления, обеспечивая пропорциональную связь регулируемого переливным клапаном давления на выходе гидромашины, работающей в режиме гидронасоса, и давления в гидроподжимном механизме переднего МКД при включенном полном приводе и при ограниченном предельной величиной, например 0.2°…0.25°, угле поворота передних колес с квадратом разности текущих значений частоты вращения соответствующих колес, а при достижении и превышении пороговой величины центростремительного ускорения и указанной предельной величины угла поворота передних колес функционирует как автоматический регулятор, который за счет регулирования расхода рабочей жидкости на входе гидромашины и давления указанных выше клапанов, поддерживает на заданном уровне, например, 0.8…0.85, величину безразмерного критерия поворачиваемости, равного соотношению разности курсовых углов центральных точек задней и передней оси колес и угла поворота передних колес, разность текущих значений которого и заданного уровня - ошибка регулирования определяются в вычислительном блоке на основе измерения угла поворота передних колес и вычисления разности указанных курсовых углов, равной разности соотношений соответствующих продольных и поперечных компонент центростремительного ускорения, например, при повороте вправо и разности обратной величины этих соотношений при повороте влево, измеряемых задним и передним акселерометрами, установленными над центральными точками задней и передней оси с поворотом вправо осей чувствительноси на 45° и 135° относительно продольной оси АТС; определением в вычислительном блоке дискретных параметров, при равенстве единице, фиксирующих достижение и превышение центростремительным ускорением центральной точки задней оси колес заданной пороговой величины, например 0.15 g, нулевую и отрицательную величину разности частоты вращения наружного и внутреннего задних колес, увеличение от нуля и положительную величину перепада давления между входом и выходом гидромашины, работающей в режиме гидромотора при положительной указанной выше разности частоты вращения задних колес, уменьшение до указанной выше предельной величины угла поворота передних колес, знакопеременного единичного коэффициента, знак которого идентичен знаку разности частоты вращения наружного и внутреннего задних колес, которые используются при функционировании САУ в режиме автоматического регулятора при формировании граничных условий использования ошибки регулирования в качестве управляющего сигнала для дроссельного регулятора расхода - при положительной разности частоты вращения и положительном или равном нулю указанном перепаде давления или при отрицательной разности указанных параметров, после того, как при нулевой разности частоты вращения колес изменяется знак ошибки регулирования и направление вращения гидромашины, а также автоматически включается передний привод и блокируется МОД, для переливного клапана - при положительной или равной нулю разности частоты вращения указанных колес и при отрицательной величине указанного перепада давления, для редукционного клапана при отрицательной разности частоты вращения указанных колес и отрицательной величине указанного перепада давления, а для работы САУ в качестве следящей системы управляющие сигналы для переливного и редукционного клапанов дополняются величиной регулируемого давления, пропорциональной квадрату разности частоты вращения задних колес для переливного клапана и передних колес для редукционного клапана в пределах указанной выше предельной величины угла их поворота; использованием в гидроуправляемом механизме переключения раздаточной коробки двух пар нижней и верхней соосно расположенных переключающих плунжеров, рабочие полости которых выполнены в передней и задней части корпуса гидроуправляемого механизма переключения, прифланцованного к корпусу раздаточной коробки, и попарно соединенных с выходами указанного выше двухпозиционного четырехходового золотника, управляющего включением крайних положений трехпозиционной зубчатой муфты переключения, при этом нижняя пара плунжеров, расположенных соосно со штоком вилки переключения и взаимодействующих с передним и задним торцами штока, перемещающегося в направляющих опорах корпуса, обеспечивает полное до упора торцев ступицы вилки во внутренние боковые поверхности опор перемещение штока с вилкой переключения между передним положением включения полного привода с разблокированным МОД и задним положением отключения переднего привода и фиксацию штока с вилкой в этих положениях усилием соответствующего плунжера за счет поддержания в его рабочей полости заданного редукционным клапаном, подключенным к гидравлической системе, давления, а верхние плунжеры взамодействуют с передним и задним торцами ступицы вилки переключения и их наружные торцевые части снабжены упорными буртиками, ограничивающими и снижающими рабочие перемещение этих плунжеров в сравнении с нижними в два раза, при котором вилка переключения из крайних положений перемещается только до нейтрального положения, в котором МОД блокирован, и фиксируется в этом положении противоположно направленными усилиями этой пары плунжеров за счет одновременного подвода и поддержания в их рабочих полостях заданного редукционным клапаном давления при соединении двухпозиционным трехходовым золотником сливного выхода указанного выше четырехходового золотника с редукционным клапаном, а для контроля трех положений вилки переключения на боковой поверхности ее ступицы закреплена контактная планка с симметрично расположенными относительно торцевых поверхностей ступицы контактными выступами с рабочей длиной, равной, например, половине необходимого перемещения вилки из крайнего в нейтральное положение, а на внутренней поверхности крышки механизма переключения закреплены два концевых микровыключателя на расстоянии между контактными роликами, равном перемещению вилки из крайнего в нейтральное положение, расположенных симметрично относительно крайних положений торцев ступицы вилки, передний из которых ориентирован на перемещение вилки в заднем нап равлении, а задний - на перемещение вилки в переднем направлении; передачей из вычислительного блока дискретного параметра, фиксирующего изменение направления, например, с правого на левое, поворота передних колес, а также вышеуказанных дискретных параметров, вместе с сигналами датчиков включения заднего хода и торможения АТС и сигналами замыкания контактов у заднего и переднего концевых микровыключателей, а также сигналов ручных кнопок панели управления включения полного привода и управляемой блокировки дифференциалов на панели управления в электронный блок управления режимами работы дифференциалов для формирования цифровых команд включения указанных выше золотников: золотника реверса - либо только при условии изменения направления поворота передних колес, либо только при снижении разности частоты вращения наружного и внутреннего задних колес до нуля и превышении указанной выше пороговой величины центростремительного ускорения, золотника управления режимом работы гидромашины - при наличия сигнала от ручной кнопки включения управляемой блокировки дифференциалов на панели управления и, либо превышения пороговой величины центростремительного ускорения и положительной величины перепада давления между входом и выходом гидромашины, либо снижения до нуля разности частоты вращения указанных колес и отрицательной величины указанного перепада давления, золотников управляемой блокировки (двухходового золотника МКДМ и треходового золотника МКД) - либо при наличии цифровой команды включения золотника управления режимом работы гидромашины, либо при наличии сигнала от ручной кнопки включения управляемой блокировки дифференциалов на панели управления и отсутствия сигналов от датчиков включения заднего хода АТС и его торможения, четырехходового золотника включения крайних положений муфты переключения - или при наличии сигнала о замыкании контактов заднего концевого микровыключателя механизма переключения и, либо при наличии сигнала от ручной кнопки включения полного привода на панели управления, либо при снижении до нуля разности частоты вращения указанных колес, или при наличии сигнала от ручной кнопки включения полного привода на панели управления, при наличии сигнала о замыкании контактов переднего концевого микровыключателя механизма переключения и при отсутствии цифровой команды включения золотников управляемой блокировки дифференциалов, трехходового золотника включения блокировки МОД - при наличии цифровой команды включения золотников управляемой блокировки дифференциалов, сигналов о замыкании контактов заднего и переднего концевых микровыключателей и, либо при наличии сигнала от ручной кнопки включения полного привода на панели управления, либо при снижении до нуля разности частоты вращения указанных колес; определением в вычислительном блоке аналогового параметра ε, равного производной по времени от соотношения относительной кривизны траектории движения центральной точки задней оси и относительной разности частоты вращения наружного и внутреннего задних колес по отношению к средней частоте вращения задних колес, преобразованием его в дискретный параметр Sε, равный нулю внутри заданного ±δε диапазона изменения параметра е и единице вне этого диапазона и формированием в электронном блоке управления сигнальными световыми индикаторами на основе этого параметра и сигнала реле давления достижения предельного давления в гидроподжимном механизме блокирующей муфты переднего МКД цифрового сигнала включения на панели управления красного светового индикатора превышения безопасной для данных условий скорости непрямолинейного движения АТС, а также сигналов включения на панели управления зеленых световых индикаторов в соответствии с сигналами переднего и заднего концевых микровыключателей и сигналами от ручных кнопок включения полного привода и управляемой блокировки дифференциалов, соответствующих каждому из четырех задаваемых режимов работы дифференциалов трансмиссии: заднему привод при разблокированном МКДМ, заднему приводу при функционирующей САУ МКДМ, полному приводу с блокированным МОД и функционирующей САУ МКДМ и МКД и полному приводу с разблокированными дифференциалами.
На фиг. 1 - представлена кинематическая схема трансмиссии АТС (4к4); на фиг. 2 и 3 - конструкция механизма переключения раздаточной коробки: продольный горизонтальный разрез - на фиг. 2 и продольный вертикальный разрез - на фиг. 3; на фиг. 4 - схема работы концевых микровыключателей механизма переключения раздаточной коробки; на фиг. 5 - схема гидравлическлй системы управления режимами работы дифференциалов; на фиг. 6 - блок - схема САУ режимами работы дифференциалов; на фиг. 7 - кинематическая схема кругового движения АТС (при больших радиусах поворота); на фиг. 8 - функциональная схема вычислительного блока; на фиг. 9 - функциональная схема электронного блока управления режимами работы дифференциалов; на фиг. 10 - функциональная схема электронного блока управления световыми сигнальными индикаторами; на фиг. 11 - принципиальная схема панели управления и световой индикации.
Трансмиссия (фиг. 1) содержит коробку перемены передач - 1, двухступечатую раздаточную коробку- 2 с межосевым коническим блокируемым дифференциалом (МОД) - 3, карданные валы - 4 и 5, ведущие мосты - задний - 6 с регулируемым межколесным дифференциальным механизмом (МКДМ) и передний - 7 с блокируемым межколесным коническим дифференциалом (МКД) - 8, главными передачами - 9 и 10, задними - 11 и передними ведомыми полуосями - 12.
Регулируемый межколесный дифференциальный механизм (МКДМ) содержит два расположенных по обе стороны главной передачи однорядных планетарных механизмов - 13, ведущими элементами которых являются коронные шестерни - 14, связанные с трубчатым валом - 15 ведомой шестерни главной передачи - 9, а ведомыми - водила - 16, которые соединены с ведомыми полуосями - 11. В центральной части корпуса заднего моста параллельно его оси расположен вал - 17 дифференциальной связи ведомых полуосей - 11, который посредством двух понижающих шестеренных передач правой и левой, имеющих одинаковое передаточное отношение, с ведущими шестернями - 18, 19 и ведомыми - 20 и 21 кинематически связан с солнечными шестернями - 22 соответствующих планетарных механизмов - 13. В левой передаче кинематическая связь шестерен - 19 и 21 осуществляется через паразитную шестерню - 23. В этом случае при повороте АТС обеспечивается возможность разнонаправленного вращения солнечных с одинаковыми оборотами при свободном вращения вала - 17, а следовательно и дифференциальная связь между ведомыми полуосями - 11, а при торможении вала - 17 - блокировка дифференциальной связи. Правый хвостовик вала - 17 соединен с валом прифланцованной справа к центральной части корпуса заднего моста реверсивной объемной гидромашины - 24, которая в зависимости от условий движения работает либо в ведущем, либо в ведомом режиме.
Передний МКД - 8 содержит блокирующую дисковую фрикционную муфту - 25 с гидроподжимным механизмом - 26, обеспечивающим ругулируемое усилие сжатия дисков.
Раздаточная двухступенчатая коробка содержит ведущий вал - 27 с двумя ведущими шестернями основной и пониженной передач с зубчатыми венцами и расположенной между ними двухпозиционной зубчатой муфтой - 28 переключения, промежуточный вал - 29 с ведомыми шестернями основной и пониженной передач, на задней части которого расположены две ведущие шестерни - 30 и 31 с одинаковым числом зубьев и зубчатыми венцами и ведомый вал, состоящий из двух секции, передней - 32 и задней - 33, внутренние хвостовики которых связаны с ведомыми коническими шестернями - 34 симметричного МОД - 35, а наружные с передним - 4 и задним - 5 карданными валами переднего и заднего привода. Шестерня - 31 взаимодействуют с ведомой шестерней - 36, установленной на задней секции - 33 ведомого вала, а шестерня - 30 - с шестерней - 37, закрепленной на корпусе - 38 МОД. Между ведущих шестерен - 30 и 31 на промежуточном валу - 29 установлена трехпозиционная зубчатая муфта - 39 переключения с синхронизаторами, обеспечивающая соединение промежуточного вала либо с шестерней - 31 в заднем положении, либо с шестерней - 30 в переднем положении, либо с обеими шестернями - 30 и 31 в нейтральном положении. В переднем положении муфты - 39 крутящий момент двигателя через пару шестерен - 30 и 37 передается на корпус - 38 МОД, делится на две равные части, которые через ведомые конические шестерни - 34, переднюю - 32 и заднюю - 33 секции ведомого вала и карданные валы - 4 и 5 передаются на привод переднего и заднего ведущих мостов. В заднем положении муфты - 39 крутящий момент двигателя через пару шестерен - 31 и 36 передается только на привод заднего ведущего моста. В нейтральном положении муфты - 39 при синхронном вращении ведущих шестерен - 30 и 31 и, соответственно, ведомых шестерен - 37 и 36 обеспечивается блокировка МОД.
Переключение муфты - 39 осуществляется вилкой - 40 (фиг. 2), ступица - 41 которой закреплена на штоке - 42, установленного в направляющих опорах - 43, выполненных в корпусе - 44 гидравлического механизма переключения, который прифланцован к корпусу раздаточной коробки. В передней и задней части корпуса - 44 в двух соосных горизонтальных расточках (фиг. 3) выполнены передние - 45, 46 и задние - 47 и 48 рабочие полости для двух соосных пар переключающих плунжеров одинакового диаметра. Причем и обе передние рабочие полости, и обе задние полости соединены между собой. В рабочих полостях - 45 и 47 размещены нижняя пара плунжеров - 49 и 50, взаимодействующих с соосно установленным между ними в направляющих опорах - 43 штоком - 42 вилки - 40 переключения. Эти плунжеры обеспечивают полное перемещение штока - 42 с вилкой - 40, ограниченное упором торцев ступицы - 41 вилки во внутренние боковые поверхности - 51, 52 направляющих опор - 43, и соответствующее перемещение муфты- 39 переключения между передним и задним положением. В этих положениях вилка - 40 с муфтой - 39 переключения удерживаются давлением соответствующего плунжера.
В рабочих полостях - 46 и 48 (фиг. 3) размещена верхняя пара соосных плунжеров - 53 и 54, взаимодействующих с торцами расположенной между ними ступицы - 41 вилки - 40. Плунжеры снабжены наружными буртиками - 55, которые, упираясь во внутренние торцевые поверхности рабочих полостей, ограничивают перемещение плунжеров - 53 и 54, величина которого в два раза меньше, чем у выше рассмотренных плунжеров - 49 и 50. В крайнем фиксированном упорами наружных буртиков - 55 положении плунжеров - 53 и 54 минимальное расстояние между их внутреними торцами соответствует ширине ступицы - 41. Поэтому при одновременном подводе давления в рабочие полости - 46 и 48 плунжеры 53 и 54 обеспечивают перемещение вилки - 40 и, соответственно, муфты - 39 переключения в нейтральное положение и за счет поддержания давления в рабочих полостях - 46 и 48 фиксируют их нейтральное положение.
При перемещении вилки - 40 и муфты - 39 из переднего в нейтральное или в заднее положение, либо, наоборот, из заднего в нейтральное или в переднее положение процесс переключения начинается с синхронизации частоты вращения промежуточного вала - 29 и зубчатых венцов включаемых шестерен, либо шестерни -31 в первом случае, либо шестерни - 30 во втором. В начале этого процесса участвуют, соответственно, либо оба передних плунжера - 49 и 53, либо оба задних - 50 и 54. Если муфта - 39 переключается из переднего в заднее положение или, наоборот, из заднего в переднее положение, то после ограниченного нейтральным положением перемещения плунжеров 53 и 54 процесс переключения завершают, соответственно, либо плунжер - 49, либо плунжер - 50. Если муфта -39 переключается из переднего или заднего положения в нейтральное положение, то после подвода давления одновременно в передние и задние рабочие полости полости процесс переключения завершает, соответственно, либо плунжер - 53, либо плунжер - 54. А плунжеры 49 и 50 после этого из процесса переключения исключаются, поскольку при одинаковом давлении в передних и задних рабочих полостях противоположно направленные усилия этих плунжеров на шток - 42 вилки переключения уравновешиваются. Если муфта - 39 переключается из нейтрального в переднее или заднее положение, то в этом случае происходит отключение зубчатых венцов, соответственно, либо шестерни - 31, либо шестерни - 30, которое происходит без участия синхронизаторов, и процесс переключения обеспечивают, соответственно, либо плунжер - 49, либо плунжер - 50. В этом случае соответствующие плунжеры - 53 или 54 занимают крайние положения и в процессе переключения не участвуют.
На боковой поверхности ступицы - 41 вилки переключения закреплена контактная планка - 57 с двумя симметрично расположенными относительно торцевых поверхностей ступицы контактными выступами - 58 и 59 (фиг. 4) с рабочей длиной Δz, равной, например, половине необходимого перемещения вилки из нейтрального в крайнее положение, а на внутренней поверхности крышки механизма - 60 (фиг. 3) переключения закреплены два концевых микровыключателя - 61 и 62 с контактными роликами - 63 (фиг. 4), установленных симметрично относительно внутренних боковых поверхностей - 51 и 52 направляющих опор на расстоянии, равном перемещению вилки из крайнего в нейтральное положение При этом обеспечивается опережение замыкания контактов соответствующего микровыключателя до перемещения вилки в нейтральное положение и компенсация запаздывания исполнения гидравлической системой управляющего сигнала микровыключателей для включения нейтрального положения вилки - 40. Высота выступов - 58 и 59 несколько превышает необходимое рабочее перемещение контактного ролика - 63.
Для гидравлической системы управления режимами работы трансмиссии (фиг. 5) источником питания является гидропневматический аккумулятор - 64, зарядка которого обеспечивается шестеренным гидронасосом - 65, приводимого от носка коленчатого вала двигателя АТС клиноременной передачей - 66 (фиг. 1), и автоматом зарядки - 67, поддерживающем заданное давление ра, например 20 МПа, в нагнетательной магистрали - 68. Данная гидравлическая система - с "закрытом центром". Рабочая жидкость из нагнетательной магистрали распределяется по трем контурам: к гидроподжимному механизму - 26 блокирующей муфты - 25 переднего МКД (фиг. 1) через редукционный клапан - 69 с пропорциональным электроуправлением, максимальное давление ру2, на выходе которого, не превышает используемого давления в системах управления фрикционными муфтами автоматических коробок передач; к гидроуправляемому механизму переключения раздаточной коробки через редукционный клапан - 70, на выходе которого поддерживается заданное давление py1, например 3.0…4,0 МПа; к объемной реверсивной гидромашине - 24 героторного или героллерного типа в задний МКДМ через дроссельный регулятор расхода - 71 с пропорциональным электроуправлением при ее работе в ведущем режиме гидромотора, а в ведомом режиме гидронасоса - к электроуправляемому переливному клапану - 72, регулирующему и ограничивающему давление на выходе гидромашины, работающей в ведомом режиме гидронасоса. Для исключения в этом режиме работы разряжения на входе гидромашины - 24, в сливной магистрали - 73 посредством подпорного клапана - 74 поддерживается небольшое избыточное давление, например, 0.15…0.20 МПа. Для ограничения давления на выходе гидронасоса - 65 служит предохранительльный клапан - 75.
В контуре питания гидроподжимного механизма - 26 подвод рабочей жидкости от редукционного клапана - 69 осуществляется электроуправляемым двухпозиционным трехходовым золотником - 76. При включенном соленоиде С12 золотник подает рабочую жидкость в гидроподжимной механизм, при выключенном - рабочая полость гидроподжимного механизма связана со сливной магистралью - 77, через которую рабочая жидкость свободно без сопротивления поступает в резервуар -78, а вход в золотник - 76 этом случае перекрыт.
Управление механизмом переключения раздаточной коробки осуществляется электроуправляемыми двухпозиционными четырехходовым золотником - 79 включения крайних положений муфты - 39 переключения, который обеспечивает либо отключение переднего, либо включение полного привода с разблокированным МОД, и трехходовым золотником - 80 блокировки МОД. Подвод рабочей жидкости в передние - 45, 46 и задние рабочие полости 47 и 48 гидроуправляемого механизма переключения раздаточной коробки от редукционного клапана - 69 под давлением py1 осуществляется золотником 79. При этом отвод рабочей жидкости из этих рабочих полостей золотником - 79 в сливную магистраль - 77, происходит через последовательно соединенный с ним золотник - 80. Сливной выход золотника - 79 при выключенном соленоиде С4 соединен золотником - 80 со сливной магистралью - 77. В этом случае золотник - 79 обеспечивает переключение муфты - 39 из одного крайнего положения в другое. При этом перемещение штока - 42 с вилкой - 40 осуществляют либо передние, либо задние нижние и верхние плунжеры, причем верхние плунжеры - только до нейтрального положения муфты - 39, а дальнейшее перемещение из нейтрального положения, либо до заднего, либо до переднего положения муфты - 39 обеспечивают нижние, соответственно, либо передний плунжер - 49, либо задний - 50.
При включенном соленоиде С4 выход золотника - 80 в сливную магистраль - 77 перекрыт, и открыт вход рабочей жидкости от редукционного клапана под давлением py1, которая направляется золотником в обратном направлении - в сливной выход золотника -79. Соответственно, в рабочих полостях (задних или передних) соединенных с этим выходом давление резко возрастает. После выравнивания давлении в задних и передних рабочих полостях противоположно направленные усилия плунжеров 49 и 50 на шток - 42 вилки переключения уравновешиваются. В этом случае плунжеры - 53 и 54, как было указано выше, перемещаясь до упоров переводят вилку - 40 и муфту - 39 переключения в нейтральное положение.
Для более плавного переключения муфты - 39 рабочая жидкость в рабочие полости поступает через демпферы одностороннего действия, состоящие из дросселя - 81 с небольшим проходным сечением и обратного клапана - 82. При этом поступающая в рабочая жидкость проходит через дроссели - 81 с гидравлическим сопротивлением, а в обратном направлении, на слив - практически свободно через обратные клапана - 82.
Функционирование САУ и управляемая блокировка МКДМ и МКД обеспечивается включением электроуправляемых двухпозиционных двухходового золотника - 85 и трехходового указанного выше золотника - 76. Автоматическое переключение режимов работы гидромашины - 24 осуществляется электроуправляемым двухпозиционным четырехходовым золотником - 83 и четырехходовым двухпозиционным золотником - 84 реверса.
На схеме (фиг. 5) положение золотника - 83 при выключенном соленоиде С2 соответствует работе гидромашины в режиме гидронасоса. В этом случае вход нагнетательной магистрали - 68 и выход в сливную магистраль - 73 из этого золотника перекрыт.При выключенном золотнике - 85 МКДМ разблокирован и рабочая жидкость свободно циркулирует в замкнутом контуре, включающем магистрали - 86, 87, золотник - 85, магистрали - 88, 89, через золотник - 84 реверса. При включенном золотнике - 85 рабочая жидкость из магистрали - 87 перепускается в сливную магистраль - 73 через электроуправляемый переливной клапан - 72. В этом случае МКДМ работает в режиме управляемой частичной блокировки. Управляемая частичная блокировка заднего МКДМ обеспечивается за счет регулирования перепада давления переливного клапана и соответствующего момента сопротивления вращению гидромашины. При повороте АТС блокирующий момент МКДМ вызывает перераспределение крутящих моментов задних колес. Крутящий момент наружного колеса уменьшается, а внутреннего колеса увеличивается. При этом формируется момент сопротивления повороту АТС. При изменении направления поворота, например, с правого, которому соответствует выключенное положение золотника - 84 реверса на схеме (фиг. 5), на левое, соленоид С0 включает золотник - 84 реверса, который переключает входную - 89 и выходную - 86 магистрали гидромашины в соответствии с изменившимся направлением вращения гидромашины.
В режиме гидромотора соленоид С2 золотника - 83 включен. В этом случае рабочая жидкость от гидроаккумулятора - 64 поступает по нагнетательной магистрали 68 через дроссельный регулятор - 71 расхода, золотник - 83, магистраль - 88 и золотник - 84 реверса во входную полость гидромашины - 24, а из выходной через золотник реверса и золотник - 83 поступает в сливную магистраль - 73. В этом режиме гидромашины золотник -85 включен и вход в переливной клапан - 72 перекрыт. При этом в зависимости от положения золотника реверса направление вращения гидромашины меняется. Соответственно меняется знак разности крутящих моментов наружного и внутреннего задних колес.
При прямолинейном движении АТС и нейтральном положении управляемых колес направление вращения гидромашины, работающей в ведомом режиме гидронасоса, может изменяться из-за неодинакового сцепления или сопротивления качению правых и левых колес. При этом входная и выходная полости гидромашины меняются местами. Поэтому дополнительный для исключения разряжения подвод рабочей жидкости к всасывающей полости из сливной магистрали - 73 с указанным выше небольшим избыточным давлением осуществляется через обратные клапана - 90.
Для контроля перепада давления на входе и выходе гидромашины к магистралям - 86 и 89 подключены датчики - 91 давления. Кроме того на выходе из гидроаккумулятора - 64 подключено реле давления - 92 и к сливной магистрали - 73 - реле давление - 93, контролирующие поддержание заданных уровней давления зарядки гидроаккумулятора и подпора в сливной магистирали. На входе в гидроподжимной механизм - 26 блокирующей муфты - 25 подключено реле давления - 94, фиксирующее предельный уровеня давления py2 в гидроподжимном механизме - 26.
При непрямолинейном движении АТС система управления обеспечивает четыре режима работы дифференциалов трансмиссии. В двух из них, задаваемых посредством двух ручных кнопок на панели управления, при заднем и полном приводе АТС все три дифференциала трансмиссии (передний МКДМ, задний МКД и МОД) разблокированы, а в двух других при заднем и полном приводе МОД блокирован, а задний МКДМ и передний МКД являются объектами регулирования САУ.
Основной задачей САУ задним МКДМ и передним МКД является поперечная стабилизация непрямолинейного скоростного движения АТС, начиная с нижней пороговой величины центростремительного ускорения, например 0.15 g, посредством формирования стабилизирующей разности касательных сил тяги наружных и внутренних ведущих колес АТС. Условием формирования стабилизирующего момента при повороте АТС является обеспечения такого соотношения боковых реакций передней и задней осей колес, при котором характеристика поворачиваемости АТС близка к "нейтральной" за счет незначительной положительной разности углов бокового увода передней и задней оси колес. В этом случае САУ должна выполнять роль автоматического регулятора, поддерживающего указанную характеристику поворачиваемости. Эта задача решается САУ за счет регулирования либо частоты вращения гидромашины МКДМ и разности частоты вращения задних колес при работе гидромашины в режиме гидромотора в случаях и положительной, и отрицательной разности касательных сил тяги наружного и внутреннего задних колес, либо давления на выходе гидромашины, работающей в режиме гидронасоса, при положительной разности частоты вращения наружного и внутреннего задних колес и отрицательной разности касательных сил тяги этих колес При увеличении положительной разности частоты вращения наружного и внутреннего задних колес формируется поворачивающий момент относительно вертикальной оси АТС, при отрицательной разности касательных сил тяги и частоты вращения указанных колес - момент сопротивления поворту АТС. В последнем случае этот момент сопротивления повороту дополнительно увеличивается за счет блокирующего момента переднего МКД в результате автоматического включения переднего привода, если он был отключен.
При меньшей величине центростремительного ускорения, например при движении в сложных дорожных условиях - САУ должна поддерживать устойчивое без потери сцепления колес прямолинейное движение и не допускать тяговой перегрузки внутренних колес при повороте АТС. Эта задача решается при включенном полном приводе с блокированным МОД за счет перераспределения касательных сил тяги между правыми и левыми колесами, движущихся с неодинаковыми коэффициентами сцепления, с колес, имеющих более низкое сцепление, на колеса с более высоким сцеплением, за счет регулируемой частичной блокировки МКДМ и МКД. САУ при этом работает, как следящая система управления, поддерживая пропорциональную связь задаваемых блокирующих моментов с квадратом разности частототы вращения соответствующих колес. А при повороте АТС эта регулируемая блокировка у переднего МКД отключается.
При разблокированном МКДМ и равенстве крутящих моментов колес разность их частоты вращения соответствует кривизне траектории движения задней оси колес. Гидромашина МКДМ вращается в холостом режиме с исходной частотой вращения. При функционирующей САУ и при проявлении "недостаточной" поворачиваемости АТС гидромашина, работающая в ведущем режиме гидромотора, увеличивает частоту своего вращения и разность частоты вращения наружного и внутреннего задних колес. А при проявлении "избыточной" поворачиваемости, вызванной, например, отрицательной разницей сцепления внутреннего и наружного колеса, гидромашина автоматически переключается в режим гидронасоса и в этом режиме за счет момента сопротивления вращению и возникновению блокирующего момента может уменьшить разность частоты вращения задних колес до нуля. Диапазон изменения разности частоты вращения и соответствующей разности крутящих моментов колес в ведомом режиме работы гидромашины при движении АТС на автотрассах с радиусами закруглений 300…800 м. существенно уже, чем в ведущем режиме работы. Это объясняется незначительной кривизной траектории движения и соответствующей относительной разностью частоты вращения колес при переходе из ведущего режима в ведомый режим работы, например при ширине колеи колес АТС 1.6 м, равной всего 0.0053…0.002, соответственно. Поэтому при нулевой разности частоты вращения колес блокирующего момента не всегда будет достаточно для полной компенсации "избыточной" поворачиваемости. В этом случае гидромашина автоматически переключается обратно в ведущий режим работы гидромотора с одновременным изменением направления своего вращения. И за счет положительной разности частоты вращения внутреннего и наружного колеса (при наличия запаса сцепления у внутреннего колеса) и соответствующей положительной разности крутящих моментов этих колес стабилизирующий момент сопротивления повороту АТС дополнительно возрастает. При меньшем запасе тяги у внутреннего заднего колеса из-за меньшей весовой нагрузки в сравнении с наружным колесом, и, еще в большей степени, в случае его пониженного сцепления, для исключения возможного бокового заноса задней оси колес и потери управляемости при поворте АТС с отключенным передним приводом, одновременно с указанным выше переключением гидромашины и изменением направления ее вращения автоматически включается передний ведущий мост и регулируемая частичная блокировка переднего МКД. При предельном увеличении давления в гидроподжимном механизме МКД стабилизирующий момент сопротивления повороту АТС увелчивается примерно в полтора раза. В этом случае внутреннее заднее колесо разгружается, что позволяет предотвратить потерю его сцепления и боковое скольжение задней оси колес без снижения скорости движения АТС.
Таким образом САУ обеспечивает регулирование блокирующих моментов переднего МКД и заднего МКДМ в двух режимах: в первом - для оптимизации поворачиваемости АТС при скоростном непрямолинейном движении и втором - для повышении устойчивости прямолинейного движения при неблагоприятных дорожных условиях.
Блок - схема САУ режимами работы дифференциалов трансмиссии представлена на фиг. 6. Блок - 95 включает аналоговые датчики частоты вращения передних Ω1л, Ω1п„ и задних Ω2л, Ω2п колес, угла поворота левого Θл и правого Θп управляемых передних колес, двухкомпонентные акселерометры, например "low-g" емкостного типа, оси чувствительности z1, u1 и z2, u2 которых параллельны горизонтальной поверхности (фиг. 7) и направлены к продольной оси АТС под углами 45° и 135°, для измерения двух соответствующих проекций центростремительного ускорения центральных точек передней J1 и задней J2 оси колес, датчики давления на выходе из рабочих полостей гидромашины р1 и р2, а также дискретные датчики заднего хода z1, торможения z2 и трех положений вилки механизма переключения раздаточной коробки -z, 0 и +z. В качестве последних использованы два конечных микровыключателя - 61 (КВ-2) и 62 (КВ-2) (фиг. 4).
Соответствующие выходные сигналы датчиков ω1л, ω1п, ω2л, ω2п частоты вращения колес, θл, θп углов поворота передних колес, j1z, j1u, j2z, j2u - проекций центростремительных ускорений j1 и j2, p1 и р2 - указанного давления рабочей жидкости из блока - 95 передаются в вычислительный блок - 96. В этом блоке определяются кинематические параметры непрямолинейного движения АТС и формируются аналоговые управляющие сигналы Δk1, Δk2 и Δk3, передаваемые через электронный блок управления (ЭБУ) - 97 режимами работы дифференциалов трансмиссии в гидравлическую систему для автоматического регулирования частоты вращения Ωг гидромашины при ее работе в ведущем режиме посредством регулятора расхода и, соответственно, разности частоты вращения задних колес, давления р2 на выходе гидромашины переливнм клапаном при ее работе в ведомом режиме, и давления ру2 в гидроподжимном механизме блокирующей муфте переднего МКД и, соответственно, блокирующих моментов МКДМ и переднего МКД. В результате автоматического регулирования указанных параметров при непрямолинейном движении АТС на задних и передних колесах формируется стабилизирующая разница крутящих моментов Мст2 и Mст1 (фиг. 6). В блоке - 96 определяются также дискретные управляющие сигналы, передаваемые в ЭБУ - 97 для формирования управляющих команд включения соленоидов C0…С4 золотников гидравлической системы, а также дискретные сигналы, которые вместе с сигналами реле давления - 92, 93, 94 гидравлической системы передаются в ЭБУ - 98 сигнальными световыми индикаторами для формирования команд включения на панели управления и световой индикации - 99 световых индикаторов. Индикаторы зеленого цвета подтверждают включение заданного каждого из четырех режимов дифференциалов трансмиссии, - желтого цвета предупреждают водителя о риске возможного превышении предельно допустимой для данных условий скорости движения, а красного цвета фиксирует это превышение, а также информирует о неполадках в гидравлической системе.
На функциональной схеме блока - 96 (фиг. 7) представлены формулы расчета текущих значений: расчетного значения угла θ поворота передних колес, равного углу поворота условного переднего колеса с осью поворота, пересекающей центральную точку O1 передней оси колес (фиг. 6), при котором радиус поворота АТС тот же, что и при двух колесах, абсолютной величины этого угла; средней частоты вращения ω2 задних колес, разности частоты вращения Δω2 наружного и внутреннего при повороте задних колес, ее относительной величины ξ=Δω2/ω; ρ0 - относительной кривизны круговой траектории полюса поворота О2; углов β2 и β1 между главными осями u2, u1 и направлением векторов j2, j1 центростремительного ускорения, соответственно, для заднего и переднего акселерометра, а также их разности Δβ. Кроме того вычисляется перепад давления Δр между входной и выходной полостями гидромашины и центростремительное ускорение j2 центральной точки О2 задней оси колес.
Текущие значения углов β1 и β2 определяются, как обратные тригонометрические функции соотношений χ1=jz1/ju1 и χ2=jz2/ju2 измеряемых проекций центростремительного ускорения. В соответствии с изображенной на фиг. 6 кинематической схемой кругового движения АТС по часовой стрелке jz1=, j1sinβ1, jz2= j2sinβ2, ju1=j1cosβ1 и ju2=j2cosβ2. При изменении направления кругового движения величина jz1=j1cosβ1, jz2=j2cosβ2, jz1=j1sinβ1 и jz2= j2sinβ2. Для замены в формулах определения χ1 и χ2 тангенсов на котангенсы введен дискретный параметр Kθ, получаемый преобразованием аналоговой величины угла θ поворота передних колес в релейном звене -100. При правом повороте и θ>0 Kθ=1, при левом повороте и θ<0 Kθ=-1. Параметр Kθ в качестве сомножителя используется для преобразования знакопеременных текущих расчетных значений угла поворота θ передних колес в абсолютные значения, а также в формулах для определения разности частоты вращения Δω2 задних колес и перепада давления Δр между входной и выходной полостями гидромашины. В этих случаях знаки этих аналоговых параметров не зависит от направления поворота АТС и вращения гидромашины. Индекс "2л" соответствует наружному (при повороте) заднему колесу, а "2п" внутреннему; индекс "1" - входной полости гидромашины, а "2" - выходной полости (фиг. 8).
В общем случае β1=45±ψ1 и β2=45±ψ2, где ψ1 и ψ2 - курсовые углы центральных точек O1 передней и О2 задней оси колес, причем ψ2 одновременно и угол бокового увода задней оси. Знаки при ψ1 и ψ2 зависят от величины l0≈L/ψ2 расстояния полюса поворота О0 до задней оси колес. При смещенном полюсе поворота вперед, если l0>L, то ψ1 и ψ2 - положительны (в соответствии с фиг. 6), если l0<L, то ψ1<0 и ψ2>0. Как следует из кинематической схемы кругового движения (фиг. 6) с повышенной скоростью, при котором l0>L ψ2 > ψ1 и β2>β1. При β2=β1 вместо поворота АТС двигается "крабом" с курсовым отклонением на ψ=ψ1=ψ2.
Угол бокового увода задней оси ψ2, не должен превышать допустимой величины 7°…8°. При изменении угла бокового увода задней оси от 1° до 8° и, соответственно, 46°<β2<53° относительная погрешность косвенного измерения соотношений χ2 превысит относительную погрешность акселерометра в 2.83…2.91 раза и в несколько меньшей степени она возрастет при определении χ1, так как ψ1<ψ2. А при ориентации осей u1, u2 чувствительности акселерометров в поперечном направлении и осей z1 и z2 - вдоль продольной оси АТС, указанная погрешность возрастает соответственно, в 58.3…8.2 раза. Таким образом предлагаемое расположение акселерометров позволяет снизить относительную погрешность косвенного измерения tgβ1 и tgβ2 в 20.6…2.82 раза.
В качестве регулируемого параметра при скоростном непрямолинейном движении АТС предложен безразмерный критерий поворачиваемости kп, равный отношению разности углов β2 - β1 и абсолютной величины угла |θ| поворота передних колес, kп=Δβ/|θ|. Как следует из схемы (фиг. 6), угол бокового увода передней оси ψ10=ψ1+|θ|. С учетом β1=45+ψ1 и β2=45+ψ2 при равенстве углов бокового увода ψ10=ψ2 передней и задней оси колес kп=1, что соответствует "нейтральной" поворачиваемости АТС. При kп<1 "недостаточная" поворачиваемость, а при kп>1 "избыточная". В случае "нейтральной" поворачиваемости траектория поворота АТС наиболее точно отражает заданный водителем угол поворота передних колес. Однако автоматическое поддержание САУ kп=1 нецелесообразно. Из-за погрешности косвенного измерения kп фактическая величина kп может оказаться выше единицы и привести к потере боковой устойчивости движения АТС. И поэтому автоматически поддерживаемая величина kп0 должна быть несколько меньше единицы, например, kп0=0.8…0.85. В связи с увеличенной погрешностью измерения величины Δβ при малых значениях указанного выше центростремительного ускорения j2 введено нижнее пороговое ограничение j2=jmin, равное например 0.15 g, для функционирования САУ в рассматриваемом режиме. В вычислительном блоке определяется разность Δj=j2-jmin. В релейном звене - 101 (фиг.8) эта разность преобразуется в дискретный параметр SΔj. При Δj≥0 он равен единице и в этом случае САУ работает, как автоматический регулятор, минимизирующий за счет обратной связи по текущей величине параметра kп ошибку регулирования Δk=±(kп0 - kп) до величины статической ошибки регулирования.
Однако определение текущей величины kп из соотношения Δβ/|θ| практически невозможно из-за того, что при входе или выходе АТС из поворота, не говоря уже о прямолинейном движении, когда значения Δβ и |θ| равны или близки к нулю. Поэтому текущее значение параметра kп в вычислительном блоке (фиг. 8) определяется по следующей формуле:

где Sθ0 - дискретный параметр, полученный преобразованием аналоговой величины |θ| в релейном звене -102 (фиг. 8), равный единице при |θ|≤θ0 и равный нулю при |θ|>θ; θ0-минимальная величина |θ| соответствующая переходу от непрямолинейного движения к прямолинейному и обратно, определяется, как отношение Δβ0/kп0; Δβ0 минимальное значение разности Δβ, соответствующее заданному предельному для непрямолинейного движения радиусу R0lim круговой траектории движения АТС. Например, при jmin=0.15 g и предельной разрешенной скорости движения 130 км/час величина R0lim оставляет примерно 890 м. Величина Δβ0, равная отношению длины колесной базы и радиуса круговой траектории, при указанной величине R0lim и длине колесной базы, например, 2.76 м (УАЗ) составит примерно 0.18°, а величина θ0 при kп0=0.8 - примерно 0.23°.
При R0≥R0 lim и абсолютной величине угла поворота колес в диапазоне изменения 0≤|θ|≤θ0, при θ0, равным, например 0.2°…0.25°, дискретный параметр Sθ0 равен единице, kп=kп0, ошибка регулирования отсутствует и САУ в режиме автоматического регулятора не функционирует.
При круговом движении АТС с R0<R0 lim и превышении порогового значения центростремительного ускорения Δj≥0 (SΔj=1) в вычислительном блоке (фиг. 8) в звене -103 определяется указанная выше ошибка регулирования  и с целью уменьшения статической ошибки регулирования САУ, выполняющей функцию автоматического регулятора, она корректируется в изодромном звене - 104. На основе скорректированной ошибки Δk формируются указанные выше управляющие сигналы: Δk1 для регулятора расхода Δk2 для переливного клапана и Δk3 для редукционного клапана.
и с целью уменьшения статической ошибки регулирования САУ, выполняющей функцию автоматического регулятора, она корректируется в изодромном звене - 104. На основе скорректированной ошибки Δk формируются указанные выше управляющие сигналы: Δk1 для регулятора расхода Δk2 для переливного клапана и Δk3 для редукционного клапана.
Для регулятора расхода - 71, функционирующего только в ведущем режиме работы гидромашины, управляющий сигнал Δk1 определяется произведением величины ошибки регулирования Δk на выходе изодромного звена, суммы двух дискретных параметров (SΔω+Sp), равной 1 или 0, дискретного параметра SΔj и коэффициента Kδω равного ±1. Дискретный параметр SΔω, определяемый в релейном звене -105, при положительных значениях разности частоты вращения наружного и внутреннего задних колес равен нулю, а при нулевой и отрицательной разности равен единице. Дискретный параметр Sp, полученный в релейном звене -106 преобразованием указанного выше аналогового параметра Δр=p1-р2 (перепада давления между входом и выходом гидромашины) равен нулю при Δр≤0 в случае перехода от ведущего режима к ведомому и в случае обратного перехода от ведомого режима к ведущему при Δр≤-Δpmin, где величина Δpmin равна суммарным гидравлическим потерям δр0 при циркуляции рабочей жидкости в магистралях 86, 89 и переливном клапане - 72. А при остальных значениях перепада давления Δр параметр Sp=1. Таким образом сумма (SΔω+Sp) в ведомом режиме работы гидромашины равна нулю, управляющий сигнал Δk1 равен нулю и регулятор расхода не функционирует. А в ведущих режимах работы гидромашины, как при положительной, так и при отрицательной указанной выше разности частоты вращения колес эта сумма равна единице. Величина Kδв определяется в звене -107 из разности (1 - 2 * SΔω) и при положительной разности частоты вращения наружного и внутреннего задних колес Kδω=+1, а при отрицательной - Kδn=-1. Таким образом при переходе из ведомого режима работы гидромашины в ведущий режим гидромотора с изменением направления вращения соответственно изменяется знак управляющего сигнала Δk1.
Аналоговый управляющий сигнал Δk2 для переливного клапана - 72 при работе гидромашины в ведомом режиме, определяется в звене -108 (фиг. 8) суммой двух составляющих. Первая составляющая этого сигнала представляет собой произведение управляющего сигнала Δk и разностей единицы с дискретными параметрами (1 - Sp), (1 - SΔω). Разность (1 - Sp) при снижении перепада давления Δр до нуля равна единице и фиксирует выход гидромашины из ведущего режима и переход в ведомый.режим работы. Разность (1 - SΔω) равна единице только при положительной разности частоты вращения наружного и внутреннего задних колес, а при выравнивании их частоты вращения равна нулю. В этом случае происходит возврат, как уже было указано выше, к ведущему режиму работы гидромашины с изменением направления ее вращения золотником - 84 реверса (фиг. 5). Вторая составляющая - величина рω2, определяемая в звене -109, равна нулю при SΔj=1, а при SΔj=0 равна регулируемому давлению переливного клапана при функционировании САУ в режиме следящей системы управления, обеспечивающей изменение давления на выходе гидромашины и соответствующего блокирующего момента МКДМ пропорционально изменению квадрата разности частоты вращения задних колес.
В сумматоре - 110 (фиг.8) формируется управляющий сигнал Δk3 для электроуправляемого редукционного клапана - 69 и гидроподжимного механизма -26 блокирующей муфты - 25 (фиг. 5) переднего МКД. Первая составлющая - Δk*SΔω при положительных значениях разности частоты вращения наружного и внутреннего задних колес равна нулю. Как уже было сказано, при снижении в процессе ведомого режима работы гидромашины этой разности до нуля SΔω=1. Таким образом эта составляющая управляющего сигнала начинает действовать одновременно с выше рассмотренным управляющим сигналом Δk1 при возврате ведущего режима работы гидромашины с измененным направлением вращения. Вторая составляющая - произведение pω1 и Sθ0, где рω1 - регулируемая величина давления в гидроподжимном механизме переднего МКД, пропорциональная квадрату разности частоты вращения передних колес, определяемая в звене - 111 (фиг. 8). Эта составляющая действует только при прямолинейном движении и при входе и выходе АТС из поворота, когда |0|≤θ0 и Sθ0=1.
Управляющие сигналы Δk1, Δk2 и Δk3 из вычислительного блока поступают в ЭБУ -97 (фиг. 6) режимами работы дифференциалов трансмиссии. В этом блоке (фиг. 9) эти сигналы после усиления с разными коэффициентами K1, K2, K3 в качестве выходных сигналов uг1, uг2 и uг3 передаются на входы ЭБУ - 112 регулятора расхода - 71, ЭБУ -113 переливного клапана - 72 и ЭБУ-114 редукционного клапана - 69 (фиг. 5).
В ЭБУ - 97 (фиг. 6) в качестве дискретных сигналов из вычислительного блока передаются рассмотренные выше дискретные параметры SΔj, SΔω, Sp, а также цифровые команды u10 и u20 ручных кнопок панели управления - 99 Kpy1 и Kpy2 включения переднего привода и управляемой блокировки дифференциалов, сигналы Sz1 и Sz2 датчиков включения заднего хода и торможения и сигналы S1z и S2z от заднего КВ1 и переднего КВ2 (фиг. 4) микровыключателей механизма переключения раздаточной коробки для формирования команд автоматического и ручного управления золотниками.
При выключенных кнопках Kpy1 и Kpy2 передний привод отключен u10=0 и МКДМ разблокирован u20=0. При включении переднего привода кнопкой Kpy1 и выключенной кнопке Kру2 разблокированы также МОД и передний МКД. Функционирование САУ либо в качестве автоматического регулятора при SΔj=1, либо в качестве следяшей системы управления частичной блокировкой МКД и МКДМ при SΔj=0 начинается после включения кнопки Kpy2 и включением золотников - 85 и 76 (фиг. 5). Соленоиды этих золотников С11 и C12 включаются одной цифровой командой u1=1. Она определяется логической суммой цифровой командой u2 включения золотника - 83 управления режимом работы гидромашины и логического произведением сигнала u20 ручной кнопки управления и отрицания (отсутствия) сигналов Sz1 и Sz2 от датчиков включения заднего хода и торможения АТС. Если цифровая команда u2=0, то при торможении АТС происходит разблокировка дифференциалов, а если u2=1, то такая разблокировка дифференциалов исключается.
Переключение режима работы гидромашины МКДМ осуществляется автоматически золотником - 83. При выключенном соленоиде С2 золотника гидромашина работает в ведомом режиме гидронасоса, а при включенном соленоида С2 - в ведущем режиме гидромотора. Включается соленоид цифровой командой u2=1. Изменение режима работы гидромашины происходит одновременно со сменой управляющего сигнала, в ведущем режиме гидромашины - это Δk1, а в ведом режиме - Δk2. Цифровая команда u2 определяется логической суммой двух слагаемых: логического произведения сигнала u20 ручной кнопки управления, дискретных сигналов SΔj и Sp и логического произведения сигнала u20, дискретного сигнала SΔω и отрицания дискретного сигнала Sp. При равенстве обоих слагаемых нулю соленоид С2 выключен и гидромашина работает в ведомом режиме. При равенстве любого из двух слагаемых единице соленоид включен и гидромашина работает в ведущем режима гидромотора. Равенство обоих слагаемых единице логически невозможно. При равенстве первого слагаемого единице включен ведущий режим гидромашины с положительной разностью крутящих моментов наружного и внутреннего колеса (при "недостаточной" поворачиваемости). При равенстве второго слагаемого единице тот же ведущий режим включается с измененным направлением вращения гидромашины и с отрицательной разностью указанных моментов (при "избыточной" поворачиваемости).
При изменении направления поворота АТС (в данном случае в соответствии с фиг. 7 с правого на левое) изменяется и направление вращения гидромашины. В вычислительном блоке (фиг. 8) указанный выше дискретный параметр Kθ, принимающий значения +1/-1, преобразуется в релейном звене - 115 в дискретный параметр Sθ, равный нулю, например, при повороте управляемых колес вправо и равный единице при повороте влево. Этот параметр передается в ЭБУ режимами работы дифференциалов (фиг. 9), где с его участием формируется цифровая команда u0 для включения соленоида С0 золотника - 84 реверса (фиг. 5). Кроме того изменение направления вращения гидромашины, как было указано выше, происходит и при снижении разности частоты вращения наружного и внутреннего задних колес до нуля и переключения золотником - 83 ведомого режима гидромашины в ведущий режим. Цифровая команда u0 определяется логическим произведением двух сомножителей. Первый сомножитель - логическая сумма дискретного сигнала Sθ и логического произведения дискретных сигналов SΔω и SΔj. Второй сомножитель - отрицание логического произведения этих трех дискретных сигналов. Такая логическая формула цифровой команды u0 обеспечивает включение соленоида С0 либо только при изменении направления поворота, либо только при нулевой разности частоты вращения задних колес. Но исключается его включение в случае одновременного действия этих двух факторов.
Управление механизмом переключением раздаточной коробки осуществляется золотниками - 79 и 80 (фиг. 5). При выключенных ручных кнопках Кpy1 и Kpy2 (фиг. 11) и отсутствия сигналов их включения u10=0, u20=0 и u1=0 соленоиды С3 и C4 (фиг. 9) золотников выключены, рабочее давление py1 подводится золотником - 79 в передние рабочие полости - 45 и 46 механизма переключения (фиг. 5), а задние рабочие полости 47 и 48 соединены золотниками - 79 и 80 со сливной магистралью - 78. Вилка - 40 (фиг. 4). переключения находится в заднем положении, в котором привод передних колес отключен. Контактный ролик - 63 микровыключателя КВ1 находится в исходном положении и контакты микровыключателя замкнуты, а у микровыключателя КВ2 под воздействием переднего выступа - 58 на контактный ролик - 63 контакты разомкнуты.
Для включения полного привода с блокированным МОД включаются обе укзанные кнопки управления, а для включения полного привода с разблокированным МОД включается только кнопка Kpy1. В обоих случаях включается соленоид С3 и золотник - 79 подводит рабочее давление py1 в задние рабочие полости - 47 и 48, а передние рабочие полости -45 и 46 золотник - 80 соединяет со сливной магистралью - 78. Вилка - 40 перемещается в переднем направление под действием пары задних плунжеров 50 и 54 (фиг. 5).
Если включены обе кнопки, то перемещение вилки - 40 завершается при центральном положении контактной планки - 57 вилки - 40 (фиг. 4). В этом положении, соответствующем нейтральной позиции вилки - 40 и зубчатой муфты - 39 переключения, контакты микровыключателей КВ1 и КВ2 замкнуты и сигналы S1z и S2z (фиг. 9) равны единице. Это замыкание контактов происходит с некоторым опережением до завершения перемещения вилки - 40 в нейтральное положение. При замыкании контактов обоих микровыключателей включается соленоид С4 золотника - 80. И как было указано выше, за счет подвода рабочего давления одновременно в переднюю - 46 и заднюю - 48 рабочие полости вилка -40 фиксируется передним - 53 и задним - 54 плунжерами с упорными буртиками - 55 в нейтральном положении зубчатой муфты - 39, в котором МОД блокирован (фиг. 5).
Если включена только кнопка Кру1 включения соленоида С4 и золотника - 80 не происходит, передние рабочие полости - 45 и 46 не разъединяются со сливной магистралью -78. После упора буртиком - 55 и остановки заднего плунжера - 54 в нейтральном положении вилки - 40 ее перемещение в крайнее переднее рабочее положение, в котором МОД разблокирован, завершает задний плунжер - 50. При этом под воздействием заднего выступа - 59 контактный ролик - 63 размыкает контакты микровыключателя КВ1.
Для включения блокировки МОД при его разблокированном состоянии (в крайнем переднем положении вилки - 40) включается кнопка Кpy2. В этом случае цифровая команда u1 (фиг. 9) включения соленоидов С11 и С12 золотников - 76 и 85 управляемой блокировки дифференциалов равна единице, а ее отрицание (-u1)=0, контакты КВ1 разомкнуты (S1z=0), соленоид С3 выключается и золотник - 79 подводит рабочее давление py1 в передние рабочие полости - 45 и 46 и вилка - 40 перемещается передними плунжерами - 49 и 53 в заднем направлении. После замыкания контактов микровыключателя КВ1 на подходе вилки - 40 к нейтральному положению при замкнутых контактов обоих микровыключателей включается соленоид С4 (фиг. 9) золотника - 80. В результате подвода рабочего давления в переднюю - 46 и заднюю - 48 рабочие полости плунжеры - 53 и 54 фиксируют вилку - 40 в нейтральном положении (фиг. 5).
Полный привод, как было указано выше, может включаться автоматически при равенстве дискретного сигнала SΔω единице, поэтому при формировании цифровых команд включения золотников - 77 и 80 в качестве управляющего суммарного сигнала u10A (фиг. 9) включения полного привода используется логическая сумма дискретного сигнала SΔω, с сигналом u10 его ручного включения кнопкой Кру1 (фиг. 11).
Цифровая команда включения соленоида С3 золотника - 79 определяется логической суммой двух составляющих. Первая составляющая является логическим произведением суммарного сигнала u10A и сигнала S1z микровыключателя КВ1. Вторая составляющая является логическим произведением сигнала u10 включения кнопки Kpy1, сигнала S2z микровыключателя КВ2 и отрицания (т.е. отсутствия) цифровой команды u1 включения соленоидов С11 и С12 золотников - 85 и 77. Цифровая команда включения соленоида С4 золотника - 80 определяется логическим произведением сигналов S1z, S2z, u10A и сигнала u20 включения кнопки Кpy2.
Цифровые сигналы, подтверждающие включение заданных режимов работы трансмиссии, формируются в ЭБУ сигнальными световыми индикаторами (фиг. 10). При этом учитываются не только положение указанных ручных кнопок панели управления, но и сигналы микровыключателей КВ2 и КВ1 (фиг. 4), контролирующих соответствие положения вилки - 40 переключения раздаточной коробки заданному режиму работы трансмиссии. Эти цифровые сигналы передаются на панель управления (фиг. 11) для включения соответствующих реле и световых индикаторов зеленого цвета.
Сигнал u100 информирует об отключенном приводе переднего моста и о разблокированном заднем МКДМ. Этот сигнал формируется в виде логического произведения отрицания сигнала u10A включения полного привода, отрицания сигнала u20 включения управляемой блокировки МКДМ кнопкой Кру2 на панели управления и отрицания сигнала S2z концевого микровыключателя КВ2 (фиг. 4) в механизме переключения раздаточный коробки. При u100=1 на панели управления (фиг. 11) включается реле РЭ10 и зеленый световой индикатор Л10.
Сигнал u101 (фиг. 10) информирует об отключенном приводе переднего моста и о функционирующей САУ заднего МКДМ. Он формируется в виде логического произведения сигнала u20 включения управляемой блокировки МКДМ и отрицаний сигналов u10A включения полного привода и сигнала S2z концевого микровыключателя КВ2. При u101=1 включается реле РЭП и зеленый световой индикатор Л11 на панели управления (фиг. 11).
Сигнал u200 (фиг. 10) информирует о включенном полном приводе с блокированным МОД и функционирующей САУ задним МКДМ и передним МКД. Этот сигнал формируется в виде логического произведения сигнала u20, сигнала u10A и сигналов S1z, S1z от замкнутых контактов микровыключателей КВ1 и КВ2 (фиг. 4). При u200=1 включается реле РЭ20 и зеленый световой индикатор Л20 на панели управления (фиг. 11).
Сигнал u201 (фиг. 10) информирует о включенном полном приводе с разблокированным МОД и о выключенной управляемой блокировки заднего МКДМ и переднего МКД. Этот сигнал формируется в виде логического произведения сигналов u10A, отрицания сигнала u20 включения управляемой блокировки и отрицания сигнала S1z от замкнутых контактов микровыключателя КВ1. При u201=1 на панели управления (фиг. 11) включается реле РЭ21 и зеленый световой индикатор Л21.
Для обеспечения безопасности скоростного непрямолинейного движения АТС при компенсации чрезмерной как "избыточной", так и "недостаточной" поворачиваемости АТС, когда величина формируемых регулируемыми дифференциалами стабилизирующих моментов недостаточна, необходимо своевременное информирование водителя о превышении в данных условиях скорости движения.
Учитывая большую опасность бокового заноса задней оси при "избыточной" поворачиваемости, характерной для АТС с задним приводом, для предупреждения водителя о риске потери управляемости на круговом участке автодороги при продолжении движения АТС с отключенным передним приводом при заданной скорости в ЭБУ сигнальными световыми индикаторами (фиг. 10) определяется цифровой сигнал u30. Этот сигнал является логическим произведением указанных выше дискретных параметров SΔω, SΔj (фиг. 8) и становится равным единице одновременно с автоматическим включением переднего привода при SΔω=1. При u30=1 на панели управления включается реле РЭ30 и желтый световой индикатор Л3.
Разнонаправленное и симметричное относительно среднего значения изменение частоты вращения задних колес за счет регулирования частоты вращения гидромашины, работающей в режиме гидромотора, трансформируется в перераспределение скоростных потерь задних ведущих колес. При этом соответствующая разность коэффициентов скоростных потерь этих колес равна их относительной разности разности частоты вращения. Соответственно перераспределяются и крутящие моменты этих колес. За счет этой стабилизирующей разности крутящих моментов компенсируется либо "избыточная", либо "недостаточная" поворачиваемсть и АТС. При компенсации "избыточной" поворачиваемости более нагруженным является внутреннее колесо, при компенсации "недостаточной" - наружное колесо. На дорогах с твердым покрытием увеличение крутящего момента более нагруженного колеса в предалах допустимой по сцеплению тяговой нагрузки пропорционально увеличению коэффициента скоростных потерь вследствие тангенциальной эластичности шин. А стабилизирующая разность крутящих моментов пропорциональна относительной разности ξ частоты вращения колес. При движении на круговых участках автодороги относительная кривизна ρ0 постоянна. Чем меньше радиус закругления автодороги и больше кривизна траектории, тем больше и необходимая стабилизирующая разница крутящих моментов колес. И таким образом, соотношение ρ0/ξ при круговом движении является практически постоянной величиной. Однако при предельном по сцеплению крутящем моменте, вызывающем скольжение колеса, пропорциональная связь относительной разности ξ частоты вращения колес и стабилизирующей разности крутящих моментов нарушается. Это соотношение начинает либо увеличиваться при "избыточной" поворачиваемости, либо уменьшаться при "недостаточной". В вычислительном блоке (фиг. 8) определяется аналоговый параметр ε, равный производной этого соотношения по времени. При установившемся круговом движении он равен нулю, а при скольжении колеса и нарушении установившегося кругового движения абсолютная величина его возрастает. При "недостаточной" поворачиваемости ε<0, а при "избыточной" - ε>0. В релейном звене - 116 (фиг.8) этот аналоговый параметр преобразуется в дискретный параметр Sε. При изменении величины ε в пределах ±δε этот параметр равен нулю, а вне предела - единице, что является сигналом о завышенной для данных условий скорости движения АТС.
Кроме того для формирования сигнала необходимого снижении скорости движения в вычислительном блоке дополнительно определяются дискретные параметры Sψ1 и Sψ2, фиксирующие превышения Δψ1 и Δψ2 текущими значениями углов ψ10 и ψ2 бокового увода передней и задней оси колес допустимой величины ψmax. Текущее значение угла ψ10 определяется из выражения ψ10=|0|±(β1 - 45°), где знак "+"соответствует смещенному вперед полюсу поворота l0>L в соответствии со схемой кругового движения АТС на фиг. 7, когда β1 больше 45°, а знак "-" соответствует круговому движению с меньшими радиусами круговой траектории при l0<L, когда β1 меньше 45°. Поэтому в вычислительном блоке использовано выражение: ψ10=|0|+Kβ * (β1-45°), где коэффициент Kβ=+1 при Δβ=(β1-45°)>0 и Kβ=-1 при Δβ=(β1-45°)<0. Дискретная величина коэффициента Kβ определяется посредством релейного звена - 117 (фиг. 8). Текущее значение угла бокового увода задней оси ψ2=β2-45°. В релейных звеньях 118 и 119 аналоговые величины Δψ1=ψ10-ψmax и Δψ2=ψ2-ψmax преобразуются в дискретные параметры Sψ1 и Sψ2.
Цифровой сигнал u40, фиксирующий превышение скорости непрямолинейного движения АТС для различных условий, формируется в ЭБУ (фиг. 10), как логическая сумма дискретного параметра Sε, сигнала реле давления - 94 Spy, фиксирующего предельную величину давления в гидроподжимном механизме - 25 блокирующей муфты - 26 (фиг. 5) переднего МКД, и дискретных параметров Sψ1, Sψ2. При u40=1 на панели управления (фиг. 11) включается реле РЭ40 и красный световой индикатор Л4.
На основе получаемых от реле давления -92 и 93 (фиг. 5) сигналов о снижении заданных уровней давления зарядки гидроаккумулятора Spa и подпора Sp0 в сливной магистрали - 73 в ЭБУ (фиг. 10) формируется цифровой сигнал u50 в виде логической суммы Spa и Sp0. При u50=1 включается реле РЭ50 и красный световой индикатор JI5, который информирует о повреждении или неисправности гидравлической системы, либо о необходимости регулировки автомата зарядки - 67 гидроаккумулятора или подпорного клапана - 74.
Работа трансмиссии АТС в режимах включенной управляемой блокировки дифференциалов трансмиссии при выключенном и включенном переднем приводе, прямолинейном и непрямолинейном движении АТС происходит следующим образом.
После запуска двигателя, в процессе прогрева которого происходит подзарядка гидроаккумулятора гидравлической системы, и включения кнопки Kpy0 на панели управления при выключенной Kpy2 (фиг. 11) дифференциалы трансмиссии разблокированы, а система управления приведена в рабочее состояние. В нормальных дорожных условиях привод переднего моста может быть отключен. В этом случае кнопка Kpy1 выключена. На панели управления включен зеленый световой индикатор Л10, информирующий об отключенном переднем приводе и выключенной САУ дифференциалов. Включение САУ осуществляется кнопкой Kpy2. На панели управления включается зеленый световой индикатор Л11 (вместо Л10). При трогании с места, разгоне, прямолинейном движении и отсутствии центростремительного ускорения j2 дискретные параметры SΔj=0 и Sθ0=1 (фиг. 8). Ошибка регулирования Δk=0 и управляющий сигнал Δk1 в контуре управления частотой вращения гидромашиной - 24 равен нулю и регулятор расхода - 71 прикрыт. Управляющий сигнал Δk2 переливного клапана - 72 в этом случае обеспечивает практически пропорциональную зависимость блокирующего момента МКДМ от квадрата разности частоты вращения задних колес. МКДМ работает в режиме самоблокирующегося дифференциала, "чувствительного к скорости". Передний МКД при прямолинейном движении в случае включенного переднего привода работает в аналогичном режиме, но при превышении угла поворота передних колес |0| заданной предельной величины θ0, равной, например 0.2°…0.25°, дискретный параметр Sθ0 и вторая составляющая управляющего сигнала Δk3 * Sθ0 редукционного клапана -69 (фиг. 5) равны нулю и передний МКД разблокирован.
В соответствии с нормативными требованиями к автодорогам СНИП 2.05.02-85 в диапазоне скоростей движения от 80 до 40 км/час при соответствующих наименьших радиусах закруглений дорог от 300 м до 60 м максимальное центростремительное ускорение составит от 0.185 g до 2.06 g. При загородном движении на грунтовых дорогах скорость естественным образом ограничивается неровностями дорожного полотна до указанного выше диапазона 80…40 км/час. А с учетом более малых радиусов закруглений центростремительное ускорение может увеличится по меньшей мере раза в полтора. При движении по автотрассам класса "1а" максимальная разрешенная скорость 110…130 км/час. При нормативной величине наименьшего радиуса закругления 800 м центростремительное ускорение составит в этом случае 1.17 g…1.63 g. Таким образом при загородном движении по автодорогам различного класса, в том числе и по грунтовым дорогам при непрямолинейном движении заданная нижняя пороговая величина центростремительного ускорения jmin=0.15 g для функционирования САУ дифференциалами АТС будет в большей части превышена.
При входе и в процессе поворота АТС из-за перераспределения весовой нагрузки на наружные колеса возникает момент сопротивления повороту АТС, увеличивающий боковой увод передних колес и уменьшающий боковой увод задних. Однако при ведомых передних колесах тяговая нагрузка задних ведущих колес снижает коэффициент сопротивления их боковому уводу в сравнении с передними ведомыми колесами. При некотором превышении статической весовой нагрузки задней оси колес относительно передней и при определенных скоростях движения последний фактор может оказаться существеннее первого, и боковой увод задних колес может превысить боковой увод передних колес. В этом случае возникает "избыточная" поворачиваемость АТС, которая компенсируется стабилизирующим моментом сопротивления повороту АТС. В начальной стадии до выравнивания частоты вращения внутреннего и наружного колеса компенсация обеспечивается работой гидромашины в ведомом режиме гидронасоса, давление на выходе которого регулируется переливным клапаном - 72. И если САУ за счет снижения разности частоты вращения задних колес до нуля не обеспечит необходимую величину указанного давления и уменьшение регулируемого параметра kп (критерия поворачиваемости) до заданного уровня (0.8…0.85), для увеличения момента сопротивления повороту АТС при нулевой разности частоты вращения задних колес гидромашина автоматически переключается в ведущий режим гидромотора с изменением направления своего вращения, при котором момент за счет отрицательной разности частоты вращения наружного и внутреннего задних колес существенно возрастает. Одновременно в раздаточной коробке автоматически включается передний привод с регулируемой частичной блокировкой переднего МКД и блокируется МОД. Это включение переднего привода позволяет за счет регулируемого блокирующего момента переднего МКД снизить боковую нагрузку задних колес и предотвратить их боковое скольжение. Для предупреждения водителя о риске возможного превышения для данных условий скорости движения АТС на панели управления (фиг. 11) включается желтый световой индикатор Л3. По мере увеличения регулируемого давления в гидроподжимном механизме, при параллельном автоматическом управлении редукционного клапана - 69 и регулятора расхода - 71 стабилизирующий момент сопротивления повороту АТС может возрасти более, чем в полтора раза. Если в процессе увеличения давления в гидроподжимном механизме - 26 (фиг. 5) до заданного предельного уровня снижение дискретного параметра Sε до нуля не достигается, на панели управления включается красный световой индикатор Л4 превышения скорости движения.
Увеличенный боковой увод передних колес в сравнении задними является причиной "недостаточной" поворачиваемости АТС и компенсируется стабилизирующим поворачивающим моментом за счет увеличения разности частоты вращения наружного и внутреннего задних колес гидромашиной МКДМ, работающей в режиме гидромотора, в который рабочая жидкость поступает от гидроаккумулятора - 64 (фиг. 5) через регулятор потока -71. В этом случае золотники - 79 и 80 управления механизмом переключения раздаточной коробки выключены и передний привод отключен, включение которого в нормальных дорожных условиях не только не актуально, но и может вызвать некоторое увеличение бокового увода передних колес в ведущем режиме. В отличие от предыдущего в данном случае более нагруженным является наружное заднее колесо с более высокой весовой нагрузкой, чем внутреннее, и поэтому при одной и той же абсолютной величине разности частоты вращения задних колес при компенсации "недостаточной" поворачиваемости стабилизирующая разность крутящих моментов колес выше, чем при компенсации "избыточной" поворачиваемости. И если увеличение крутящего момента наружного заднего колеса до предельной по сцеплению величины не обеспечивает необходимого увеличения регулируемого параметра kп (до заданного уровня), указанный выше дискретный параметр Sε равен единице (фиг. 8). Как и в предыдущем случае, на панели управления (фиг. 11) включается красный световой индикатор Л4, фиксирующий превышение скорости движения.
При заданном уровене регулируемого параметра kп поворачиваемость АТС близка к "нейтральной", при которой kп, равен единице. Это обеспечивает с одной стороны хорошую управляемость АТС, а с другой не допускает бокового "сноса" ни передних, ни задних колес на сухом твердом дорожном покрытии при увеличении центростремительного ускорения до 0.4 g…0.42 g. В этом случае АТС может двигаться со скоростью 130 км/час при снижении радиуса закругления автодороги до 320 м.
В условиях городского движения превышение нижнего порогового значения jmin=0.15 g центростремительного ускорения маловероятно. В этом случае SΔj=0 и САУ функционирует, как следящая система, поддерживая пропорциональную зависимость регулируемого переливным клапаном давления на выходе гидромашины МКДМ, работающей в ведомом режиме гидронасоса, квадрату разности текущих значений частоты вращения задних колес. В сухую погоду передний привод и частичная блокировка МКДМ не актуальны, и разблокировка МКДМ осуществляется выключением кнопки Kpy2. Цифровая команда u1=0 выключения управлемой блокировки МКДМ, исполняющаяся при SΔj=0 и условии равенства нулю любой из трех составляющих: отрицания сигналов от датчиков заднего хода или торможения и сигнала от кнопки Kpy2, обеспечивает разблокировку работающих дифференциалов, заднего МКДМ при отключенном переднем приводе и всех трех -при полном приводе. При включении передачи заднего хода или торможении, когда отрицание сигналов от датчиков Sz1 или Sz2 равны нулю, это включение разблокировки происходит автоматически. При отключенном переднем приводе и выключении кнопки Kpy2 на панели управления (фиг. 11) включается зеленый световой индикатор Л10.
При аварийной буксировке АТС и неработающем двигателе все управляющие соленоиды золотников обесточены, золтники выключены. При этом входная и выходная полости гидромашины соединены золотником - 83 между собой, а гидроподжимной механизм - 25 блокирующей муфты переднего МКД соединен золотником - 76 со сливной магистралью (фиг. 5). Передний МКД и МКДМ - разблокированы. При наличии в гидроаккумуляторе - 64 давления не ниже 25% от номинальной величины, превышающего давление py1 настройки редукционного клапана - 70, и при выключенных кнопках - Kpy1 и Kpy2 на панели управления золотник - 83 соединяет выход редукционного клапана - 70 с передними рабочими полостями - 41 и 42 и передний плунжер - 45 перемещает вилку - 49 в заднее положение, отключая передний привод.
Таким образом, предлагаемая механическая трансмиссия полноприводного АТС, содержащая раздаточную коробку с гидроуправляемым механизмом принудительного или автоматического включения переднего привода и блокировки межосевого дифференциала, конический межколесный диференциалом с блокирующей фрикционной муфтой и с регулируемым за счет автоматически управляемого изменения давления в гидроподжимном механизме блокирующим моментом в отключаемом переднем ведущем мосту, межколесный дифференциальный механизм с регулируемой в режиме блокировки разностью частоты вращения ведущих колес и блокирующего момента посредством объемной реверсируемой гидромашины обратимого действия с регулирующими дроссельным регулятором расхода на ее входе и переливным клапаном на ее выходе в неотключаемом заднем ведущем мосту, а также САУ, в зависимости от наличия и величины центростремительного ускорения работающую в двух режимах, обеспечивает:
- при ограниченной заданной пороговой величиной центростремительного ускорения в неблагоприятных дорожных условиях устойчивое без ухудшения маневренности из-за потери сцепления колес непрямолинейное движение за счет пропорциональной связи блокирующего момента заднего межколесного дифференциального механизма АТС с квадратом разности текущих значений разности частоты вращения задних колес, а также устойчивое при пониженном сцеплении колес прямолинейное движение АТС за счет автоматического подключения аналогичной регулируемой частичной блокировки переднего межколесного дифференциала;
- при превышении заданной пороговой величины центростремительного ускорения в нормальных дорожных условиях оптимизацию характеристики поворачиваемости АТС, обеспечивающей безопасность скоростного движения и исключающей проявление "избыточной" поворачиваемости АТС и бокового заноса задней оси колес за счет реверсирования гидромашины и регулируемой стабилизирующей отрицательной разности частоты вращения наружного и внутреннего задних колес и регулируемого блокирующего момента переднего межколесного дифференциала при автоматически включаемом переднем приводе, а также сохранение скорости движения при переходе от прямолинейного движения к круговому на закруглениях автодороги благодаря компенсации "недостаточной" поворачиваемости АТС за счет регулируемой стабилизирующей положительной разности частоты вращения наружного и внутреннего задних колес при отключенном переднем приводе.
Практическая реализация предлагаемых дифференциальных механизмов и САУ возможна на основе серийно выпускаемых гидромашин героторного или героллерного типа и гидравлического оборудования с электроуправлением.
Источники информации.
1. Милешкин К. //www.zr.ru/content/articles/335779-electronika_v polnom_privode_nap-razhhennije_4_4/ Электроника в полном приводе: напряжение 4 × 4.
2. Тимофеев Е. http://autoexpert-consulting.com/stati/avtokomponenty/3813-honda.-vse-Самохин С.chetyre-kolesa.html Honda. Все четыре колеса. 07.05.12
3. Колонтай. А //www.drive.ru/technic/4efb330200fl 1713001e32e4.html Как работает ESP. 01.06.2007
4. Попов Е.П. Автоматическое регулирование. Основные понятия, стр. 24 Госиздат физ.-мат.литературы, Москва, 1959 г.
5. Габай Е.В., Механическая трансмиссия с системой автоматического управления Габай О.Е. расределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов. RU Патент №2706681 от 10.04.2019
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулируемый межколесный дифференциальный механизм (МКДМ) для легковых автомобилей (4к2) | 2023 |
|
RU2819467C1 |
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| Трансмиссия механическая с гидравлическими дифференциальными связями ведущих колес и многорежимной системой электронного управления их блокировкой для автотранспортного средства повышенной проходимости | 2018 |
|
RU2692737C1 |
| ТРАНСМИССИЯ С ГИДРАВЛИЧЕСКИМИ МЕЖОСЕВОЙ И МЕЖКОЛЕСНЫМИ ДИФФЕРЕНЦИАЛЬНЫМИ СВЯЗЯМИ С АВТОМАТИЧЕСКИ УПРАВЛЯЕМЫМИ РЕЖИМАМИ БЛОКИРОВКИ ДЛЯ АВТОТРАНСПОРТНОГО СРЕДСТВА ПОВЫШЕННОЙ ПРОХОДИМОСТИ | 2013 |
|
RU2551052C2 |
| Транспортное средство | 1983 |
|
SU1154117A1 |
| ОБЪЕМНАЯ ГИДРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2004 |
|
RU2269707C1 |
| Устройство распределения мощности в трансмиссии | 2022 |
|
RU2785241C1 |
| МЕХАНИЗМ КОТОВСКОВА БЛОКИРОВКИ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2221949C1 |
| Стенд для испытания транспортных машин | 1982 |
|
SU1041901A1 |
| Устройство управления гидропередачами технологических тележек транспортного средства | 1980 |
|
SU912557A1 |
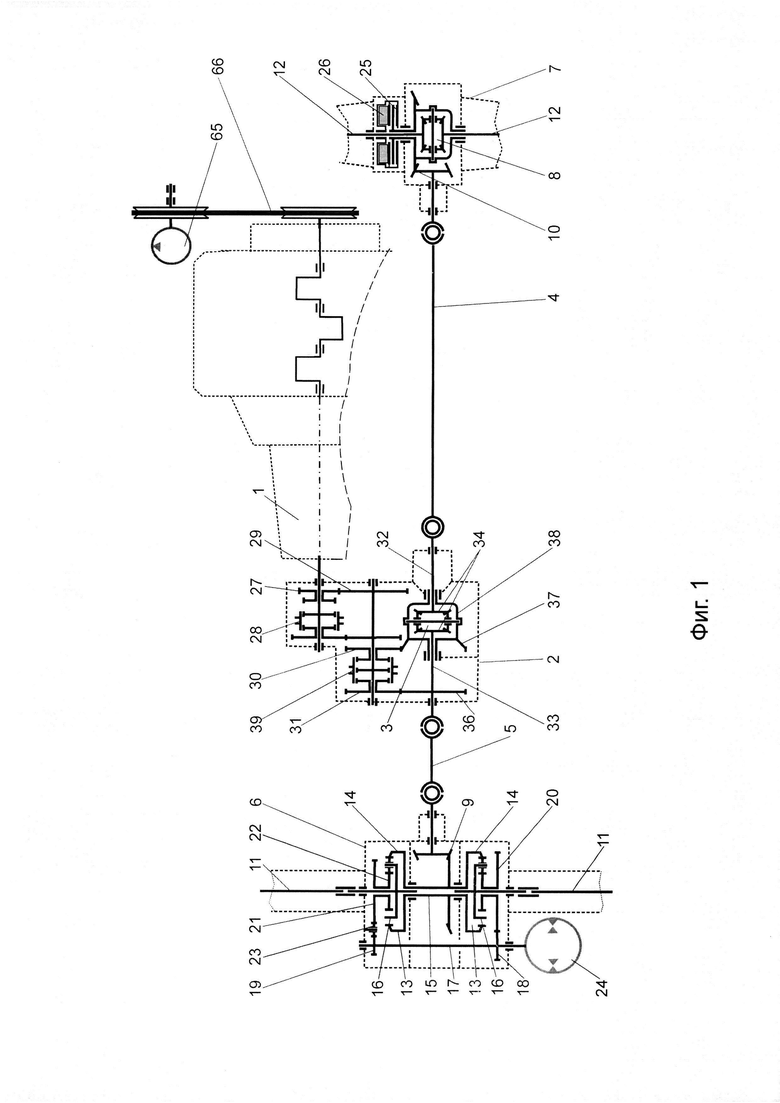

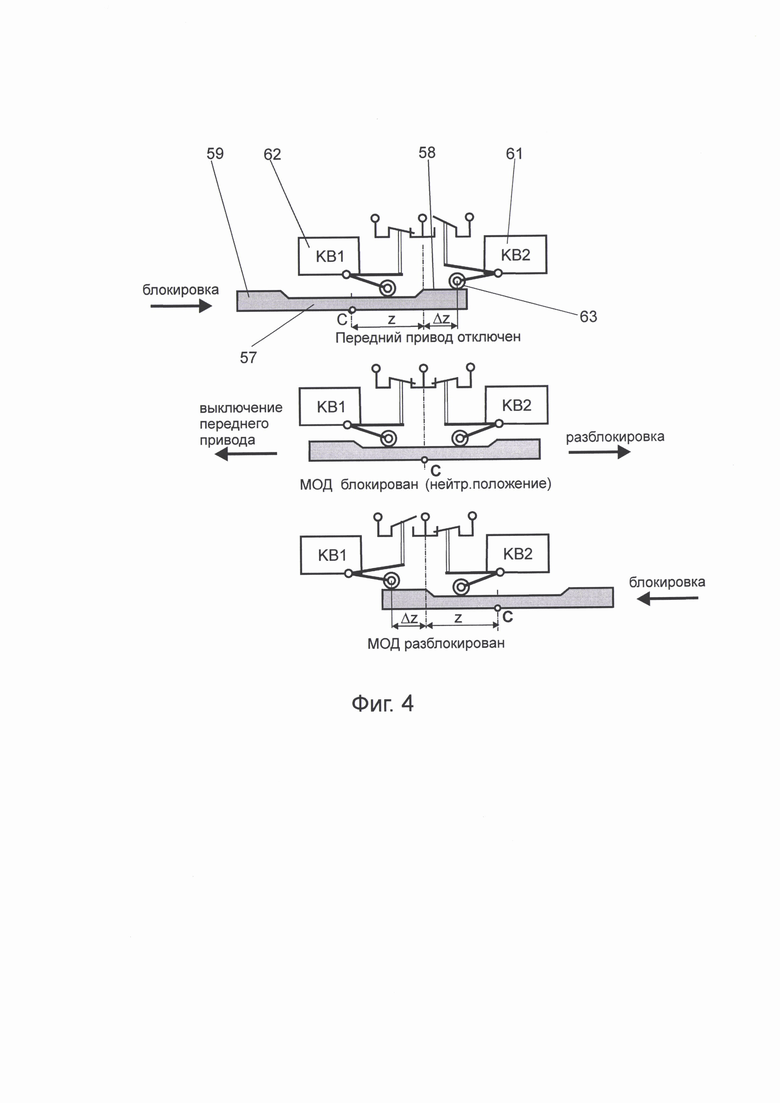
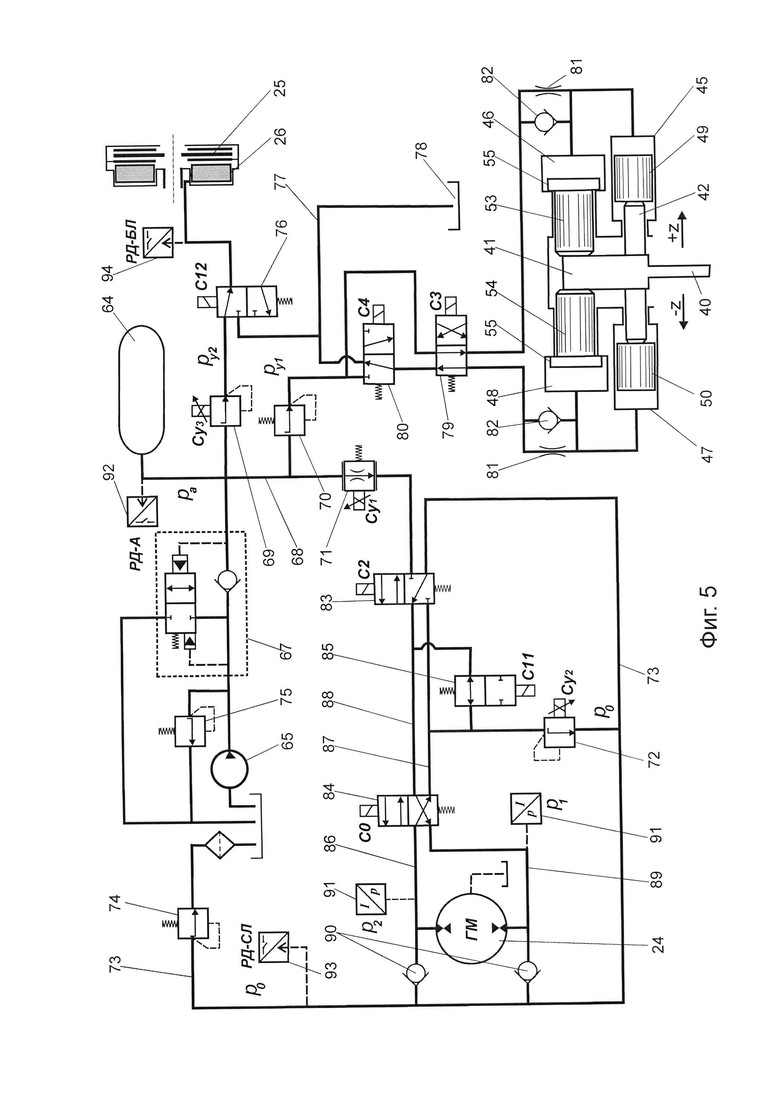
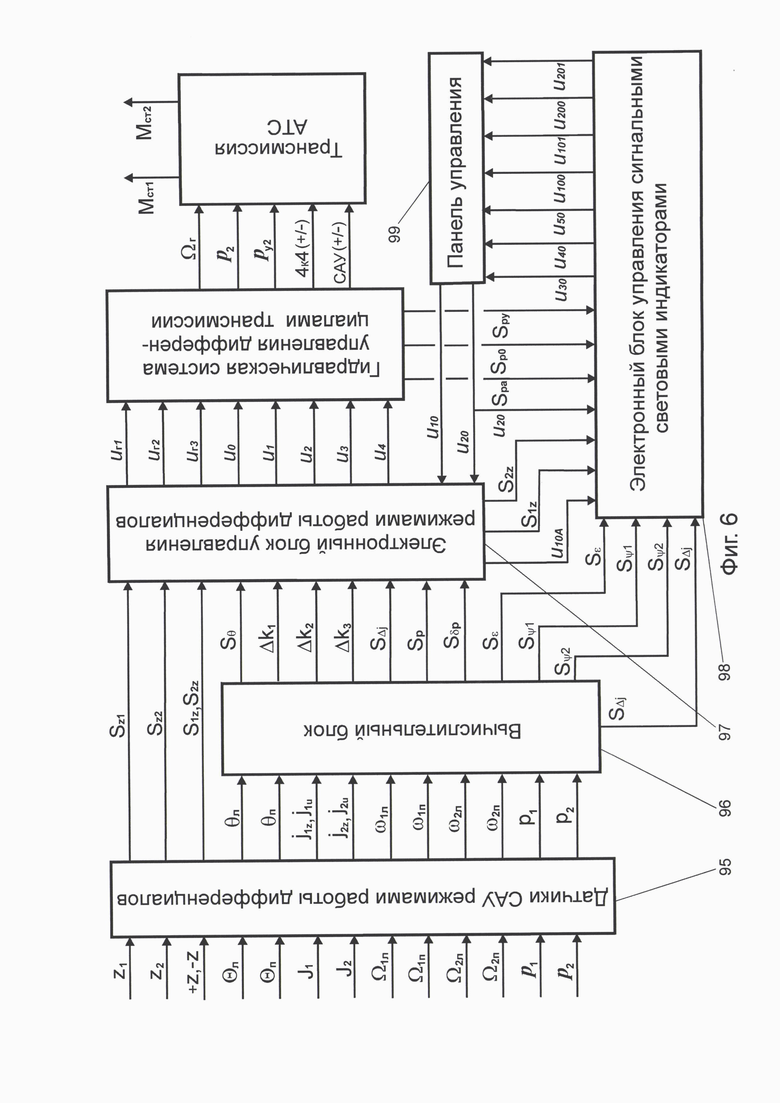
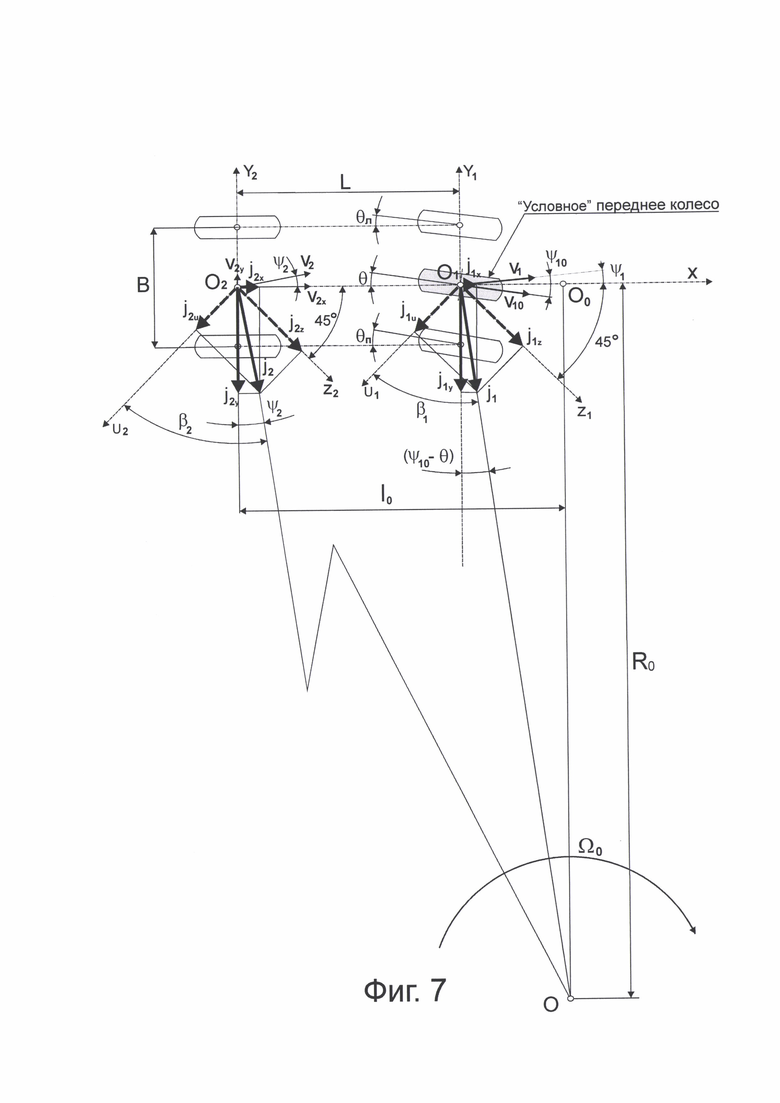
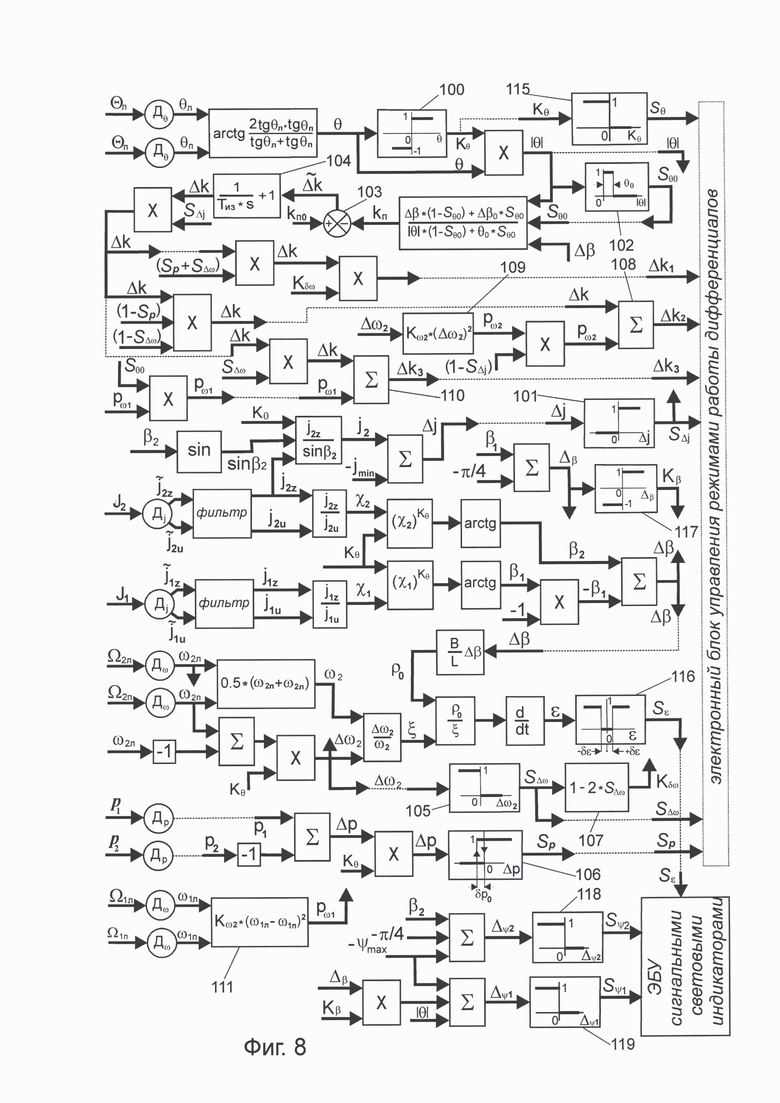

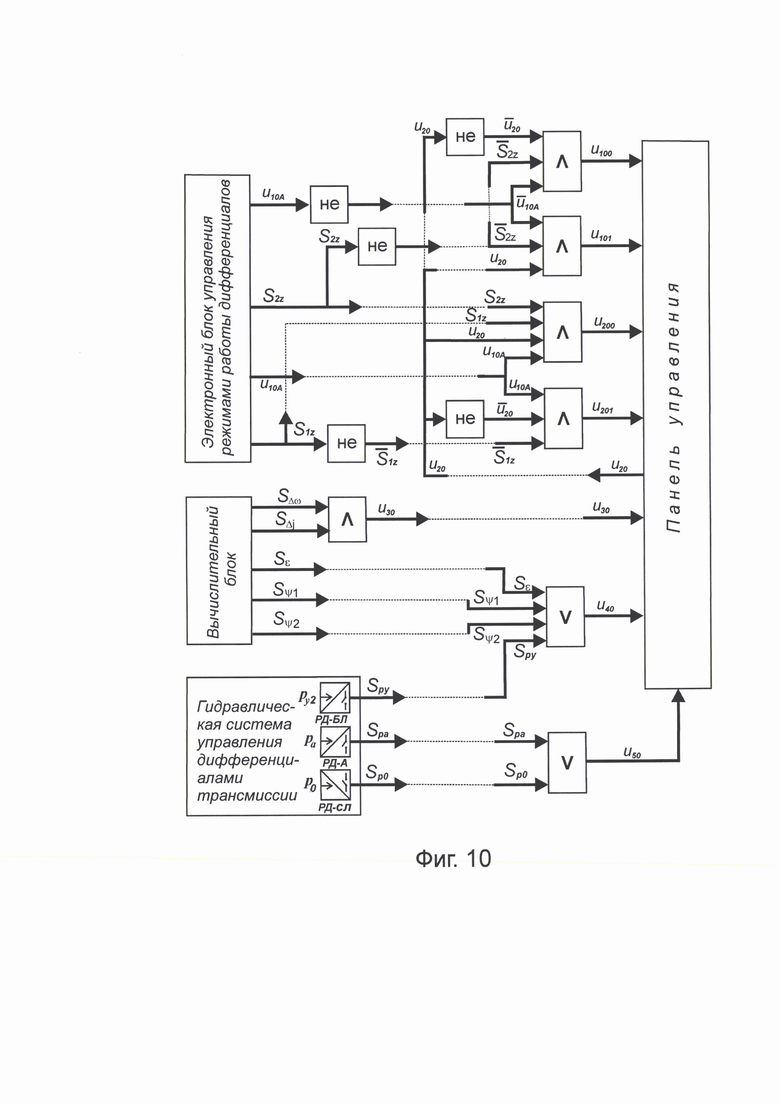
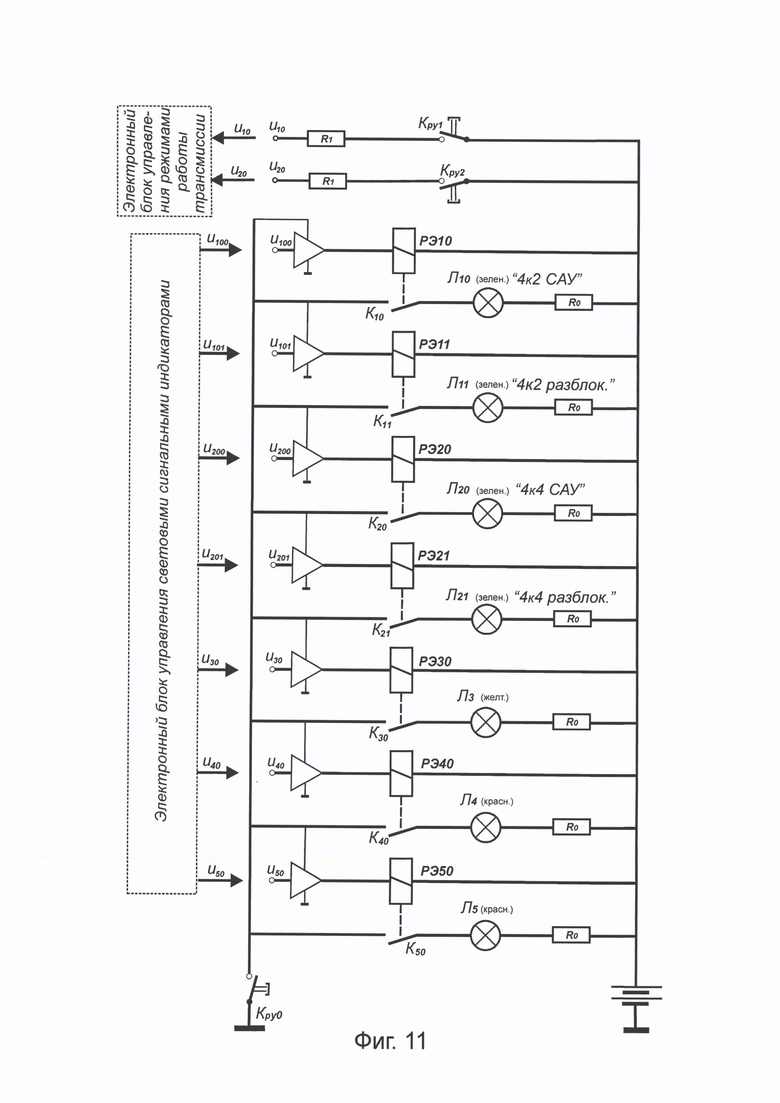
Изобретение относится к механической трансмиссии с гидроуправляемым механизмом включения переднего привода и блокировки межосевого дифференциала. Механическая трансмиссия с передним межколесным дифференциалом (МКД) снабжена фрикционной муфтой с регулируемым гидроподжимным механизмом и задним межколесным дифференциальным механизмом (МКДМ) с регулируемыми автоматически управляемыми дроссельным регулятором на выходе и переливным клапаном на выходе гидромашины. Механическая трансмиссия содержит также САУ, обеспечивающую: при нулевой или малой ниже заданного порогового значения величине центростремительного ускорения устойчивое движение АТС за счет регулируемого блокирующего момента заднего МКДМ непрямолинейное движение и за счет дополнительного включения регулируемой блокировки переднего МКД - прямолинейное движение; при большей величине центростремительного ускорения за счет поддержания заданной оптимальной величины критерия поворачиваемости АТС бесступенчатым регулированием либо положительной, либо отрицательной разности частоты вращения задних колес, а также регулируемых блокирующих моментов заднего МКДМ и переднего МКД при автоматическом включении переднего привода и блокировки МОД. Достигается повышение управляемости транспортного средства. 5 з.п. ф-лы, 11 ил.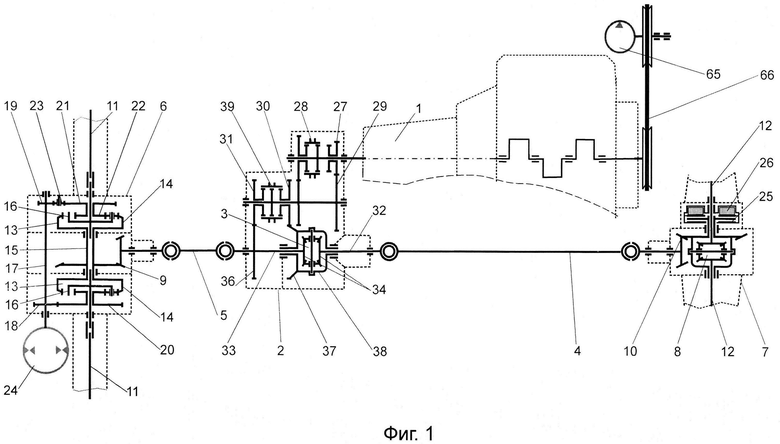
1. Механическая трансмиссия АТС (4х4) с межколесными регулируемыми дифференциалами и системой автоматического управления режимами их работы при непрямолинейном движении, содержащая раздаточную коробку с блокируемым межосевым дифференциалом и отключаемым приводом одного из ведущих мостов, снабженного коническим блокируемым межколесным дифференциалом с регулируемой блокировкой и постоянным приводом второго ведущего моста, содержащего межколесный дифференциальный механизм с двумя однорядными планетарными механизмами и валом дифференциальной связи, кинематически связанного с их солнечными шестернями парой понижающих шестеренных передач с однополюсным и двухполюсным за счет паразитной шестерни зацеплением и одинаковым передаточным отношением, обеспечивающими за счет разнонаправленного вращения солнечных шестерен либо дифференциальную связь колес при свободном вращении, либо регулируемую разность частоты их вращения за счет привода от объемной реверсируемой и обратимой гидромашины, работающей при непрямолинейном движении либо в ведущем режиме гидромотора, либо в ведомом режиме гидронасоса, подключенной к гидравлической системе с питанием от гидроаккумулятора посредством двухпозиционных электроуправляемых золотников, дроссельного регулятора расхода и клапанов с пропорциональным электроуправлением, осуществляющих разблокировку, переключение режимов работы и реверс гидромашины, а также регулирование ее частоты вращения, являющихся исполнительными механизмами системы автоматического управления (САУ) режимами работы дифференциалов, содержащей датчики угла поворота управляемых колес, частоты вращения колес, два двухкомпонентных акселерометра, расположенных над центральными точками передней и задней осей колес, датчики и реле давления в гидравлической системе, а также датчики включения передачи заднего хода и перемещения тормозной педали, вычислительный блок для определения параметров траектории движения АТС, электронные блоки управления для формирования аналоговых и дискретных сигналов управления исполнительными механизмами САУ, а также панель управления с кнопками и сигнальными световыми индикаторами, отличающаяся тем, что с целью улучшения управляемости, маневренности, безопасности непрямолинейного движения АТС (4х4) блокируемый межколесный конический дифференциал (МКД) установлен в переднем отключаемом ведущем мосту и снабжен блокирующей фрикционной муфтой с гидроподжимным механизмом, который через последовательно соединенные электроуправляемые редукционный клапан и двухпозиционный трехходовой золотник подключен к гидравлической системе, а регулируемый межколесный дифференциальный механизм (МКДМ) установлен в заднем ведущем неотключаемом мосту, при этом раздаточная коробка снабжена трехпозиционной зубчатой муфтой с синхронизаторами, обеспечивающей включение полного привода с разблокированным и блокированным межосевым дифференциалом (МОД) и отключение переднего ведущего моста, расположенной на промежуточном вале между двух с зубчатыми венцами и одинаковым числом зубьев ведущих шестерен зубчатых пар, одна из ведомых шестерен которых жестко связана с корпусом МОД, а другая установлена на заднем ведомом валу раздаточной коробки, с гидроуправляемым механизмом переключения, осуществляемого двумя парами нижней и верхней соосно расположенных переключающих плунжеров, взаимодействующих со штоком и ступицей вилки переключения, рабочие полости которых подключены к гидравлической системе через редукционный клапан и последовательно соединенные трех- и четырехходовой двухпозиционные электроуправляемые золотники либо ручной кнопкой панели управления, либо автоматически для включения полного привода с блокированным МОД, осуществляемое САУ, которая наряду с дискретным управлением золотниками гидравлической системы обеспечивает аналоговое управление указанными выше редукционным клапаном переднего МКД и переливным клапаном МКДМ в режиме следящей системы, соответственно, величиной давления ру2 в гидроподжимном механизме блокирующей муфты МКД и давления р2 на выходе гидромашины МКДМ, работающей в ведомом режиме гидронасоса, поддерживающей пропорциональную связь величины регулируемого ими давления с квадратом разности текущих значений частоты вращения соответствующих внутренних и наружных колес при малом центростремительном ускорении центральной точки задней оси колес ниже заданной пороговой величины, например 0.15g, либо при равенстве или превышении ее - аналоговое управление дроссельным регулятором расхода и указанными клапанами в режиме автоматического регулятора, поддерживающего на заданном уровне, например kn0=0.8…0.85, величину безразмерного критерия kп поворачиваемости АТС, равного соотношению разности Δβ курсовых углов центральных точек задней и передней осей колес и угла поворота передних колес, за счет регулирования расхода рабочей жидкости на входе гидромашины, работающей в режиме гидромотора как при положительной разности частоты вращения наружного и внутреннего задних колес в случае положительной или равной нулю величины перепада Δp давления между входом и выходом гидромашины, так и при ее реверсе и отрицательной величине перепада Δp и отрицательной разности частоты вращения указанных колес, а также за счет регулирования давления p2 на выходе гидромашины, работающей в режиме гидронасоса в случае отрицательной величины перепада Δр давления при малой положительной и нулевой разности частоты вращения указанных колес, а при отрицательной разности частоты вращения указанных колес еще и за счет регулирования давления рy2 в гидроподжимном механизме блокирующей муфты МКД автоматически подключаемого при нулевой разности частоты вращения наружного и внутреннего задних колес переднего ведущего моста.
2. Механическая трансмиссия по п. 1, отличающаяся тем, что указанная в п. 1 разность Δβ курсовых углов центральных точек задней и передней осей колес определяется в вычислительном блоке разностью соотношений соответствующих продольных и поперечных компонент центростремительного ускорения, например при повороте вправо, и обратной величины этих соотношений при повороте влево, измеряемых задним и передним акселерометрами, установленными с поворотом своих осей чувствительности, например вправо, относительно продольной оси АТС на фиксированные углы 45° и 135°, а определение текущей величины регулируемого параметра kп и ошибки регулирования  вследствие равенства или близости к нулю угла поворота передних колес и величины Δβ при входе и выходе из поворота и при прямолинейном движении АТС осуществляется в вычислительном блоке только при превышении абсолютной величиной угла поворота колес заданной величины θ0, например 0.20°…0.25°, при этом на основе ошибки регулирования Δk после корректировки ее в изодромном звене, а также определяемых в вычислительном блоке дискретных параметров, при равенстве единице фиксирующих достижение и превышение упомянутой в п. 1 заданной пороговой величины центростремительного ускорения центральной точки задней оси колес - SΔj, увеличение от нуля положительной величины перепада давления Δр гидромашины, работающей в ведущем режиме гидромотора при положительной разности частоты вращения наружного и внутреннего задних колес, - Sp, нулевую величину и отрицательную разность частоты вращения указанных колес - Sθω, уменьшение до заданной величины ±θ0 угла поворота передних колес - Sθ0, коэффициента Кδω=±1, знак которого идентичен знаку разности частоты вращения указанных колес, а также величин регулируемого давления на выходе гидромашины рω2 и в гидроподжимном механизме МКД pω1, пропорциональных квадрату разности частоты вращения соответствующих наружных и внутренних колес, формируются управляющие сигналы для дроссельного регулятора расхода Δk1=SΔj*(SΔω+Sp)*Kδω*Δk, переливного клапана Δk2=(1-SΔω)*(1-Sp)*Δk+(1-SΔj)*pω2 и редукционного клапана управления давлением в гидроподжимном механизме блокирующей муфты МКД Δk3=SΔω*Δθ0*pω1, передаваемые в ЭБУ режимами работы дифференциалов.
вследствие равенства или близости к нулю угла поворота передних колес и величины Δβ при входе и выходе из поворота и при прямолинейном движении АТС осуществляется в вычислительном блоке только при превышении абсолютной величиной угла поворота колес заданной величины θ0, например 0.20°…0.25°, при этом на основе ошибки регулирования Δk после корректировки ее в изодромном звене, а также определяемых в вычислительном блоке дискретных параметров, при равенстве единице фиксирующих достижение и превышение упомянутой в п. 1 заданной пороговой величины центростремительного ускорения центральной точки задней оси колес - SΔj, увеличение от нуля положительной величины перепада давления Δр гидромашины, работающей в ведущем режиме гидромотора при положительной разности частоты вращения наружного и внутреннего задних колес, - Sp, нулевую величину и отрицательную разность частоты вращения указанных колес - Sθω, уменьшение до заданной величины ±θ0 угла поворота передних колес - Sθ0, коэффициента Кδω=±1, знак которого идентичен знаку разности частоты вращения указанных колес, а также величин регулируемого давления на выходе гидромашины рω2 и в гидроподжимном механизме МКД pω1, пропорциональных квадрату разности частоты вращения соответствующих наружных и внутренних колес, формируются управляющие сигналы для дроссельного регулятора расхода Δk1=SΔj*(SΔω+Sp)*Kδω*Δk, переливного клапана Δk2=(1-SΔω)*(1-Sp)*Δk+(1-SΔj)*pω2 и редукционного клапана управления давлением в гидроподжимном механизме блокирующей муфты МКД Δk3=SΔω*Δθ0*pω1, передаваемые в ЭБУ режимами работы дифференциалов.
3. Механическая трансмиссия по п. 1, отличающаяся тем, что указанные в п. 1 рабочие полости для плунжеров гидроуправляемого механизма переключения выполнены в передней и задней частях его корпуса, прифланцованного к корпусу раздаточной коробки, и попарно соединены с выходами указанного в п. 1 двухпозиционного четырехходового золотника, обеспечивающего включение крайних рабочих положений вилки переключения, при этом нижняя пара плунжеров, расположенных соосно со штоком вилки переключения, взаимодействуя с передним и задним торцами штока, установленного в направляющих опорах корпуса, обеспечивает полное до упора торцов ступицы вилки во внутренние боковые поверхности направляющих опор перемещение вилки между передним положением включения полного привода при разблокированном МОД и задним положением отключения переднего привода и фиксацию штока с вилкой в этих положениях усилием соответствующего плунжера за счет поддержания в его рабочей полости заданного редукционным клапаном давления ру1, а верхняя пара плунжеров взаимодействует с передним и задним торцами ступицы вилки и их наружные торцевые части снабжены упорными буртиками, ограничивающими и снижающими их рабочее перемещение в сравнении с перемещением нижних плунжеров в два раза, при котором вилка переключения из крайних положений перемещается только до нейтрального положения, в котором включается полный привод с блокированным МОД, и фиксируется в этом положении противоположно направленными усилиями этой пары плунжеров за счет одновременного подвода в их рабочие полости давления py1 от редукционного клапана при включении указанного в п. 1 двухпозиционного трехходового золотника, соединяющего редукционный клапан и сливной выход указанного выше четырехходового золотника.
4. Механическая трансмиссия по п. 3, отличающаяся тем, что на боковой поверхности ступицы вилки переключения закреплена контактная планка с симметрично расположенными относительно торцевых поверхностей ступицы вилки переключения контактными выступами высотой, равной необходимому перемещению контактного ролика конечного микровыключателя, и рабочей длиной, равной, например, половине необходимого перемещения вилки из нейтрального в крайнее положение, а на внутренней поверхности крышки механизма переключения закреплены два концевых микровыключателя на расстоянии между контактными роликами, равном перемещению вилки из крайнего в нейтральное положение, расположенных симметрично относительно крайних положений торцов ступицы вилки, передний из которых ориентирован на перемещение вилки переключения в заднем направлении, а задний на перемещение вилки переключения в переднем направлении.
5. Механическая трансмиссия по п. 1 или 2, отличающаяся тем, что для автоматического дискретного управления двухпозиционными золотниками гидравлической системы, обеспечивающими изменение режима работы дифференциалов, сигналы u10, u20 включения полного привода и управляемой блокировки дифференциалов ручными кнопками панели управления, сигналы S1z, S2z от контактов заднего и переднего концевых микровыключателей механизма переключения раздаточной коробки, сигналы Sz1 и Sz2 датчиков включения заднего хода и торможения АТС, а также определяемые в вычислительном блоке дискретный параметр Sθ, при равенстве единице фиксирующий изменение направления поворота передних колес, например с правого на левое, и указанные в п. 2 дискретные параметры SΔj, Sp, SΔω передаются в ЭБУ режимами работы дифференциалов, где формируются цифровые команды включения: золотника реверса при условии равенства единице либо только параметра Sθ, либо только параметров SΔω и SΔj в соответствии с логической формулой u0=(Sθ ^ SΔω ^ SΔj) ^ (-(Sθ v (SΔω) ^ SΔj)); золотника управления режимом работы гидромашины при условии равенства единице сигнала u20 ручной кнопки панели управления и либо параметров Sp и SΔj, либо параметра SΔω при Sp=0 в соответствии с логической формулой u2=(Sp ^ SΔj ^ u20) v ((-Sp) ^ SΔω ^ u20); золотников управляемой блокировки МКДМ и МКД при условии равенства единице либо цифровой команды u2, либо сигнала u20, отрицания сигналов Sz1 и Sz2 в соответствии с логической формулой u1=u2 v (u20 ^ (-Sz1) ^ (-Sz2)); золотника включения крайних положений муфты переключения при условии равенства единице или сигнала S1z и, либо сигнала u10 от ручной кнопки панели управления, либо параметра SΔω, или сигналов u10, S2z и отрицания цифровой команды u1 в соответствии с логической формулой u3=(S1z ^ (u10 v SΔω)) v ((-u1) ^ u10 ^ ^Sz2); золотника включения блокировки МОД при условии равенства единице либо сигнала u0 от ручной кнопки панели управления или параметра SΔω, а также сигналов u1, S1z и S2z в соответствии с логической формулой u4=(u10 v SΔω) ^ u1 ^ S1z ^ Sz2.
6. Механическая трансмиссия по п. 1 или 2, отличающаяся тем, что в вычислительном блоке определяется аналоговый параметр ε - производная по времени соотношения относительной кривизны траектории движения центральной точки задней оси колес и относительной величины разности частоты вращения наружного и внутреннего задних колес по отношению к средней частоте их вращения, превышение абсолютной величины которого заданного предела δε фиксируется дискретным параметром Sε=1, который передается в ЭБУ сигнальными световыми индикаторами вместе с сигналом реле давления о достижении предельной его величины в гидроподжимном устройстве блокирующей муфты переднего МКД для формирования цифровой команды включения на панели управления красного светового индикатора превышения безопасной для данных условий скорости движения АТС, а сигналы замыкания контактов заднего и переднего концевых микровыключателей и сигналы от ручных кнопок панели управления - для формирования сигналов включения на панели зеленых световых индикаторов, информирующих о включении каждого из четырех возможных режимов дифференциалов трансмиссии, заднего привода при разблокированном МКДМ, заднего привода при функционирующей САУ МКДМ, полного привода с блокированным МОД и функционирующей САУ МКДМ и переднего МКД и полного привода с разблокированными дифференциалами.
| Механическая трансмиссия с системой автоматического управления распределением крутящих моментов между колесами автотранспортного средства (4к4) с отключаемым приводом одного из ведущих мостов | 2019 |
|
RU2706681C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ПРИВОДОМ НА ЧЕТЫРЕ КОЛЕСА | 2019 |
|
RU2710444C1 |
| Трансмиссия двухосного полноприводного транспортного средства | 2017 |
|
RU2652359C1 |
| Трансмиссия транспортного средства | 1990 |
|
SU1712206A1 |

