Изобретение относится к области авиации, в частности к системам управления вертолетом с резервированием и может быть использовано в системе управления летательным аппаратом, преимущественно вертолетом с бустерным управлением.
Известна система управления вертолетом (патент ЕР 2415669, В64С 13/42, публ. 08.02.2012), которая относится, в частности, к системе управления для ввода команд пилота для вертолета с механическим входным сигналом, по меньшей мере, одним электрическим датчиком положения для указанного входного сигнала, по меньшей мере, один источник электропитания и, по меньшей мере, один управляемый электромеханический привод, питаемый по меньшей мере одним источником электропитания и управляется по меньшей мере одним электрическим датчиком положения. Механический входной сигнал подается механически на, по меньшей мере, один управляемый электромеханический привод. В конструкции предусмотрены упоры рычажного механизма, ограничивающие любой двунаправленный ход командного вала.
Известна конструкция гидропривода для системы управления летательным аппаратом (патент RU 1840015, В64С 13/36, публ. 27.06.2006 г.), в которой привод содержит двухкамерный силовой гидроцилиндр, полости которого через систему канализации и распределители соединены с каналами нагнетания и слива рабочей жидкости, шариковые обратные клапаны и фильтры. Шариковые обратные клапаны смонтированы на входе каналов нагнетания. Это позволяет исключить ударную нагрузку на ручке летчика при переходе на работу от одной гидросистемы или пониженное число каналов силового управления, устраняет автоколебания шаровых затворов обратных клапанов в потоке рабочей жидкости.
Известна система управления вертолетом Ми-8, наиболее близкая к заявляемому решению (Техническое описание, книга II, 1970 г., стр. 102-103, рис. 113), в которой управляющее движение пилота передается от органов управления (ручки, педали) посредством тяг и качалок на входную точку гидроусилителей. Все гидроусилители работают по необратимой схеме и одновременно являются рулевыми приводами в автопилоте.
Автопилот работает в режиме дифференциального управления, т.е. при включенном автопилоте осуществляется автоматическая стабилизация вертолета в полете путем воздействия на органы управления через комбинированные гидроусилители, в то же время пилот может управлять вертолетом, не выключая автопилот.
При автоматической стабилизации вертолета исполнительные штоки гидроусилителей могут перемещаться в пределах 20% их полного хода; при этом ручки управления остаются неподвижными, зафиксированными в заданном положении пружинными механизмами загрузки. Рычаги «Шаг-газ» стопорятся фрикционным механизмом.
Гидроусилитель, установленный в системе путевого управления, имеет дополнительно режим автоматической перегонки, позволяющей при автоматической стабилизации перемещать исполнительный шток в полном диапазоне его хода.
Недостатками такой системы управления являются:
- Полная потеря управляемости вертолета при единичном отказе камеры гидроусилителей, т.к. гидроусилители являются однокамерными.
- Потеря автоматической стабилизации вертолета в случае выхода из строя основной гидросистемы, т.к. автопилот работает только при питании гидроусилителей от основной гидросистемы. В случае отказа основной гидросистемы при включенном автопилоте управление гидроусилителями переводится на ручное, а питание их переключается на дублирующую гидросистему.
- Потеря автоматической стабилизации вертолета в случае единичного отказа на участке от автопилота до рулевого привода, т.к. все элементы этого участка представлены в единичном экземпляре, такие как, устройство, вырабатывающее электрический сигнал автопилота, электрическая цепь и рулевая машина автопилота рулевого привода.
Техническая проблема, не решенная в известных устройствах, решение которой обеспечивается заявляемым изобретением, заключается в создании системы управления с резервированием, в том числе обеспечивающей выполнение требования Авиационных правил АП-29 по дублированию энергетической части системы управления.
Технический результат - повышение надежности работы автопилота и системы управления в целом, повышение безопасности полета, улучшение управляемости, снижение нагрузки на пилота.
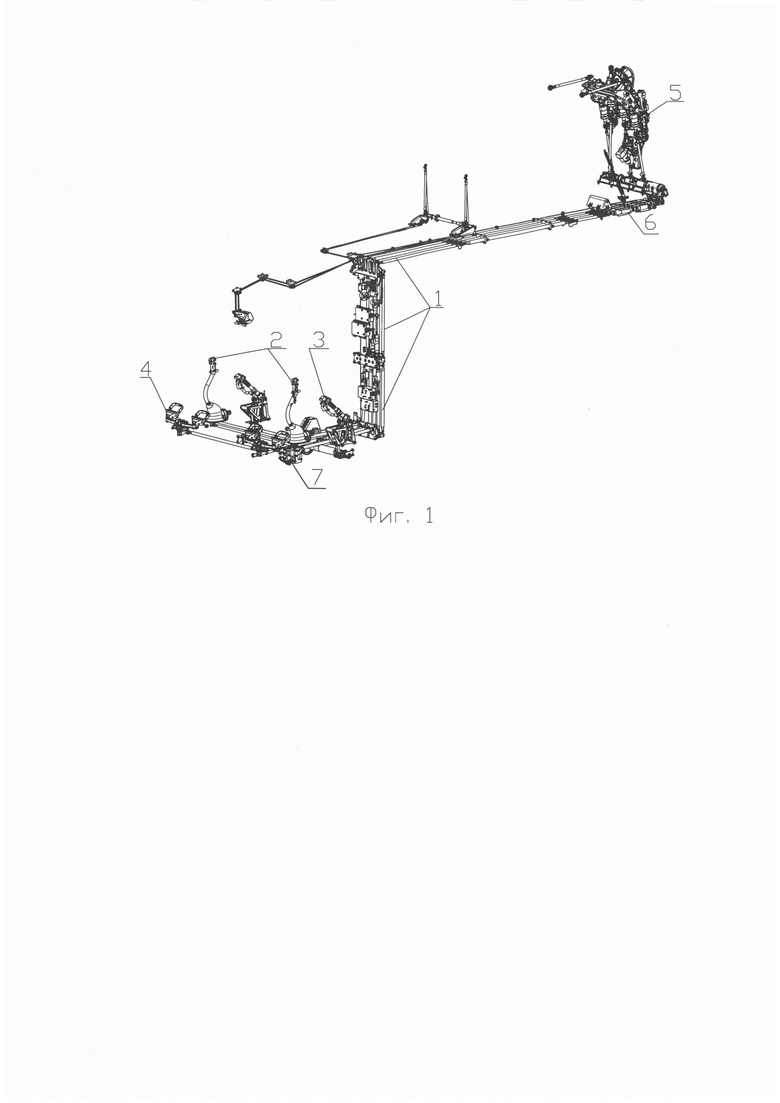
Технический результат достигается за счет того, что в системе управления вертолетом, содержащей органы управления, такие как ручки 2, рычаги 3 управления и связанные с гидродемпфером 7 педали 4, а также проводку 1, соединяющую органы управления с несущим и рулевым винтом, в соответствии с изобретением, - в проводке управления установлены двухкамерные рулевые приводы 5 и рулевые механизмы дублированные 6, причем каждый двухкамерный рулевой привод 5 состоит из гидродвигателя 17, двух блоков управления 18, рычажного механизма 19 и входного звена 20, при этом каждый рулевой механизм дублированный 6 с одной стороны закреплен к тягам управления 8, идущим от ручки 2 и педалей 4 пилота, а с другой стороны через качалки закреплен к входным тягам 9 двухкамерного рулевого привода 5.
Кроме того, в системе управления вертолетом рулевой механизм дублированный 6 состоит из двух механизмов рулевых поступательного типа 10, каждый из которых состоит из контроллера 11 и исполнительного механизма рулевого поступательного типа 12, подключенного к электрическому кабелю 13.
За счет того, что в проводке управления установлены двухкамерные рулевые приводы 5 и рулевые механизмы дублированные 6 достигается повышение надежности работы автопилота и системы управления в целом, повышение безопасности полета, улучшение управляемости, снижение нагрузки на пилота.
Применение двухкамерного рулевого привода 5 повышает безопасность полетов.
Использование гидродемпфера 7, связанного с педалями 4, повышает безопасность полетов и снижает нагрузку на пилота.
Сущность предлагаемого изобретения поясняется чертежами:
фиг. 1 - общий вид системы управления вертолетом;
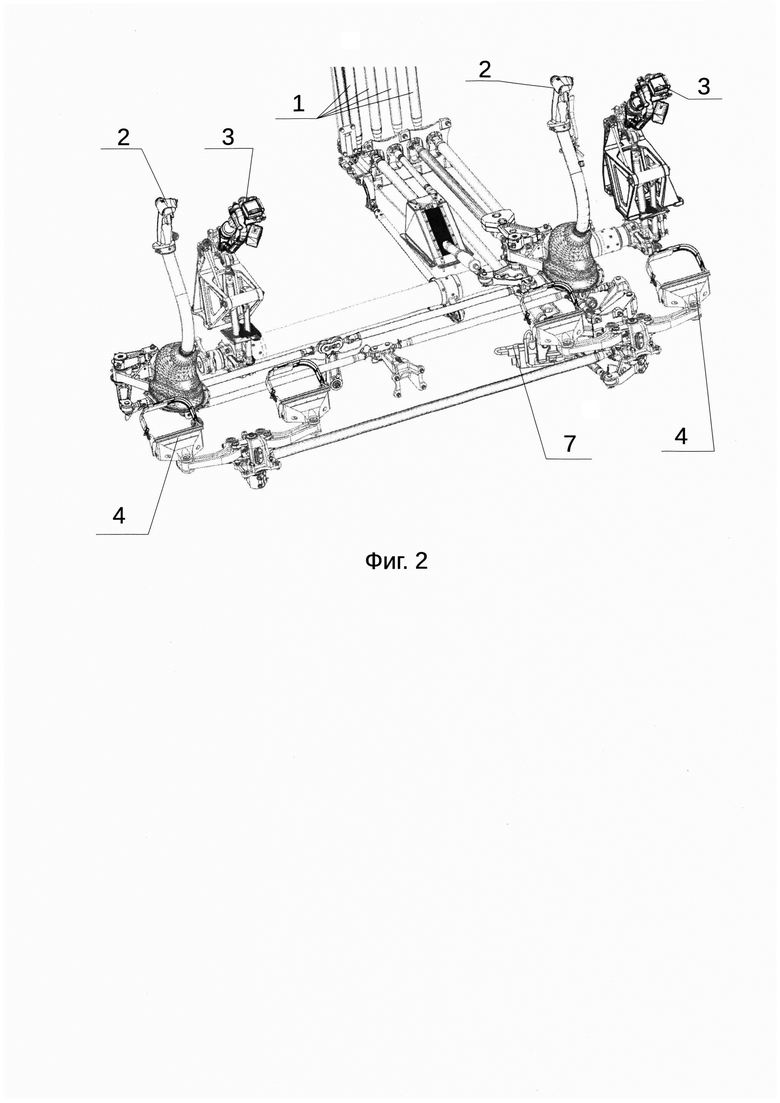
фиг. 2 - вид системы управления в кабине пилотов;
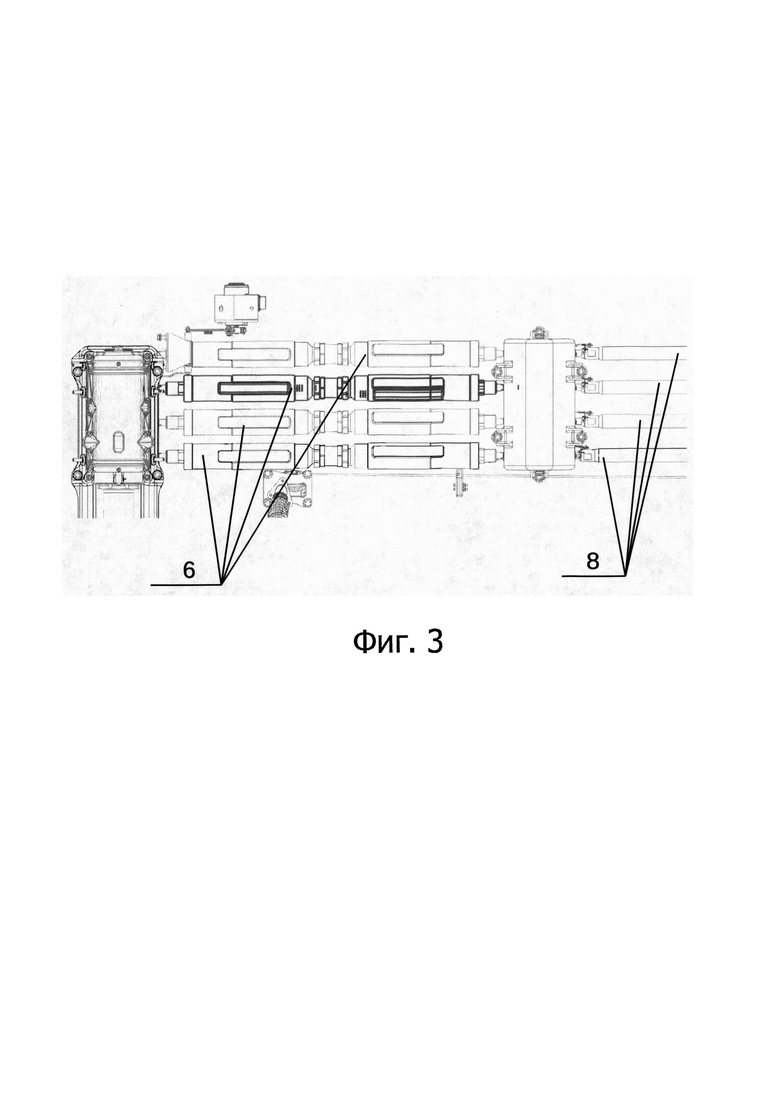
фиг. 3 - вид на рулевые механизмы дублированные в проводке управления;
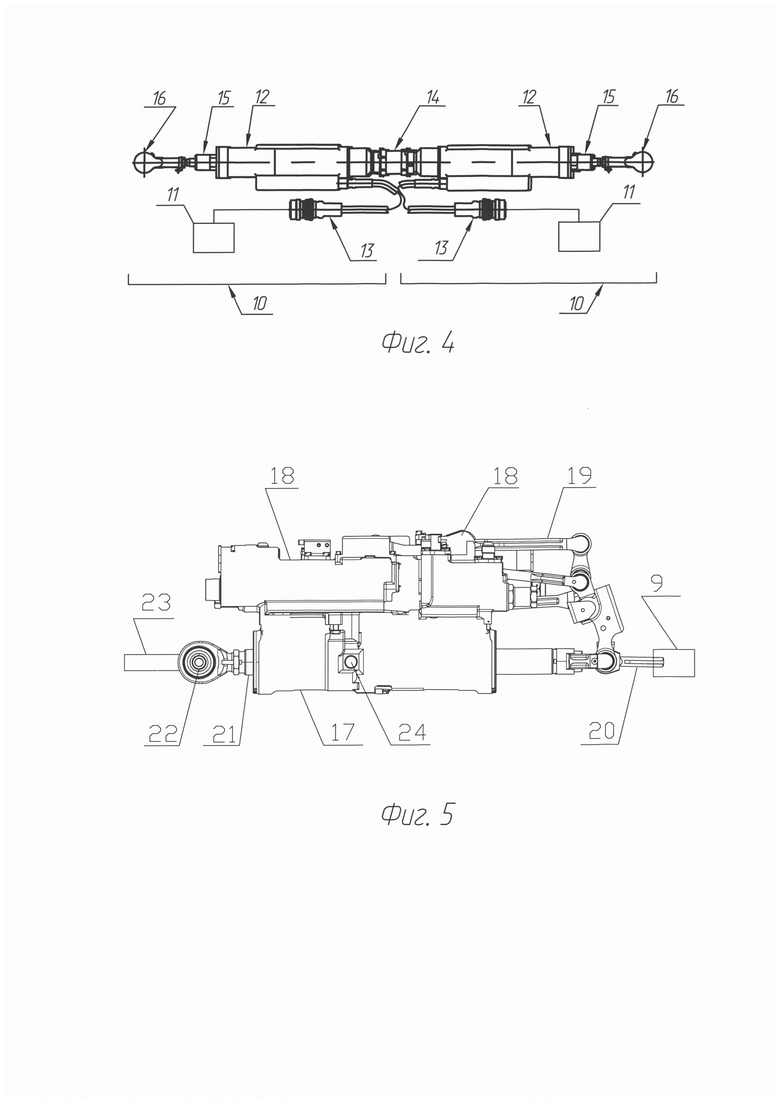
фиг. 4 - рулевой механизм дублированный;
фиг. 5 - двухкамерный рулевой привод;
фиг. 6 - гидродемпфер.
Система управления вертолетом (фиг. 1, фиг. 2) состоит из тяг основной проводки 1, которые соединяют органы управления, такие как ручки 2 продольно-поперечного управления, рычаги 3 управления общим шагом и педали 4 ножного управления, расположенные на рабочем месте пилота, с несущим и рулевым винтами (не показано).
В механической проводке ручного управления перед автоматом перекоса расположены двухкамерные рулевые приводы 5. А перед входными точками рулевых приводов 5 установлены рулевые механизмы дублированные 6, являющиеся компонентами автопилота. Педали 4 связаны с гидродемпфером 7.
Двухкамерные рулевые приводы 5 и рулевые механизмы дублированные 6 предназначены для увеличения надежности работы пилотажного комплекса в системах продольного, поперечного, ножного и управления общим шагом.
Рулевой механизм дублированный 6 (фиг. 3), расположенный в добустерной части системы управления вертолетом, с одной стороны крепится к тягам управления 8, идущим от ручки 2 и педалей 4 пилота, а с другой стороны через качалки крепится к входным тягам 9 двухкамерного рулевого привода 5 (фиг. 5).
Рулевой механизм дублированный 6 (фиг. 4) представляет собой систему из двух механизмов рулевых поступательного типа 10. Каждый из них состоит из контроллера 11 и исполнительного механизма рулевого поступательного типа 12. К каждому из механизмов 12 поступают электрические сигналы по отдельному электрическому кабелю 13, при этом они могут работать как совместно, так и по отдельности между собой.
Исполнительные механизмы рулевого поступательного типа 12 соединены между собой втулкой 14. Рулевой механизм дублированный 6 - это исполнительная часть автопилота. При выключенном автопилоте механизм 6 работает как жесткая тяга.
Рулевой механизм дублированный 6 обеспечивает перемещение выходных штоков 15 пропорционально сигналам автопилота; стопорение выходных штоков 15 при отсутствии сигнала на включение механизма 6; выдачу электрических сигналов о положении выходных штоков 15; ограничение максимального перемещения выходных штоков 15 по внутренним жестким упорам.
При включенном пилотажном комплексе его сигналы по двум независимым электрическим цепям 13 поступают на рулевые механизмы дублированные 6, которые при неподвижной ручке 2 пилота перемещают входную точку рулевого привода 5. Таким образом, обеспечивается дублированное управление от автопилота до рулевого привода 5.
Двухкамерный рулевой привод 5 (фиг. 5) предназначен для перемещения рабочих органов несущей системы вертолета в каналах продольного, поперечного, путевого управления и управления общим шагом в режиме механогидравлического управления.
Рулевой привод 5 (фиг. 5) состоит из гидродвигателя 17, двух блоков управления 18, рычажного механизма 19 и входного звена 20. Гидродвигатель 17 - двухкамерный гидроцилиндр тандемного типа с исполнительным штоком 21 (выходное звено), на котором установлен наконечник 22. К наконечнику 22 штока 21 присоединяется силовая проводка управления 23. С помощью рычажного механизма 19 золотники гидрораспределителей (не показаны) соединены с входным звеном 20 рулевого привода и исполнительным штоком 21 гидродвигателя рулевого привода 5.
К управляющей точке входного звена 20 подключается входная тяга 9 механической проводки ручного управления вертолета.
Для крепления рулевого привода 5 на вертолете предусмотрены две цапфы 24 на гидродвигателе.
Рулевой привод 5 работает следующим образом.
В конструкции рулевого привода предусмотрены главный и резервный золотники гидрораспределителя (не показаны). Главный золотник перемещается на величину, пропорциональную перемещению входного звена 20. При этом на выходе гидрораспределителя появляется расход рабочей жидкости, пропорциональный величине перемещения главного золотника, поступающий в соответствующую камеру гидродвигателя и приводящий в движение выходное звено 21 рулевого привода. Перемещение выходного звена 21 через рычажный механизм 19 передается главному золотнику, возвращая его в нейтральное положение, и движение выходного звена 21 прекращается. В случае заклинивания главного золотника блок управления переходит на работу от резервного золотника. При этом усилие, необходимое для перемещения входного звена, увеличивается.
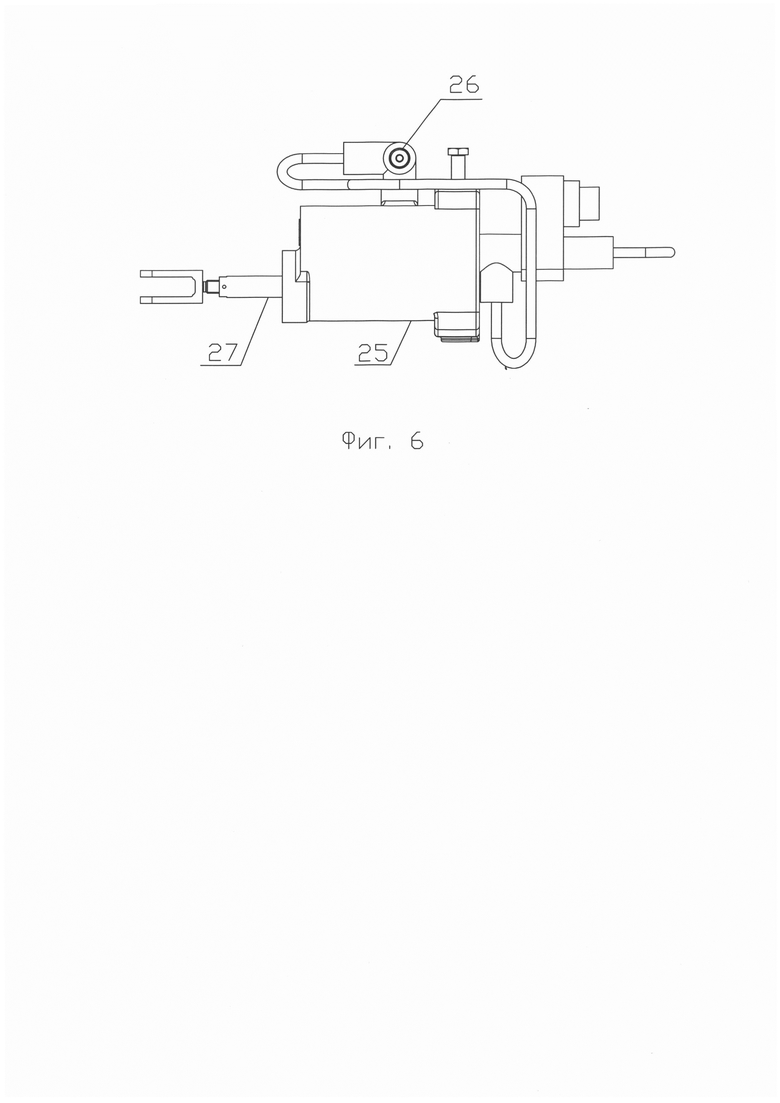
Гидродемпфер 7 (фиг. 6) предназначен для исключения возможности повреждения хвостовой балки и хвостовой трансмиссии в ножном управлении установлен гидродемпфер 7, который ограничивает скорость перекладки педалей 4 и тем самым ограничивает нагрузки на хвостовую балку и хвостовую трансмиссию за счет сопротивления перетеканию жидкости из одной полости агрегата в другую.
Гидродемпфер 7 состоит из корпуса 25, штуцера подачи 26 и штока 27.
Работа гидродемпфера 7 осуществляется в одном из двух режимов: режиме «демпфирования» и режиме «кольцевания».
В режиме «демпфирования» гидродемпфер 7 работает при подаче в зарядный штуцер 26 жидкости под давлением 55…65 кгс/см2. При этом давлении жидкость перетекает из одной полости в другую через дроссельный распределитель, в результате чего происходит демпфирование, т.е. к штоку 27 будет приложена сила, противоборствующая внешнему усилию и его уравновешивающая.
В режиме «кольцевания» гидродемпфер 7 работает при прекращении подачи жидкости в зарядный штуцер 26 под давлением 55...65 кгс/см2. При этом шток 27 перемещается за счет перетекания жидкости из одной полости в другую через проходное сечение большой площади в клапане кольцевания, в связи с чем демпфер практически не сопротивляется перемещениям органов управления вертолетом.
Система управления вертолетом работает следующим образом.
Управление вертолетом относительно трех осей осуществляется изменением величины и направления силы тяги несущего винта и изменением величины силы тяги хвостового винта.
Продольное и поперечное управление производит пилот путем отклонения ручки 2 продольно-поперечного управления, что приводит к изменению наклона тарелки автомата перекоса и вызывает циклическое изменение угла установки лопастей в различных азимутальных положениях, при этом меняется направление равнодействующей силы тяги несущего винта.
Ножное управление пилот осуществляет педалями 4 посредством изменения общего шага рулевого винта, а, следовательно, и его тяги.
Изменение тяги несущего винта производится при помощи рычага 3 управления общим шагом путем одновременного изменения общего шага несущего винта и режима работы двигателей.
В режиме ручного управления при перемещении пилотом органов управления, таких как ручки 2, рычага 3 или педалей 4 посредством проводки 1 передается на входную точку рулевого привода 5, при этом рулевые механизмы дублированные 6 работают как жесткие тяги. При перемещении входной точки рулевого привода 5 соответственно перемещается выходная точка рулевого привода 5, таким образом, происходит управление пилотом вертолета в ручном режиме в каналах продольного и поперечного шага, общего шага и ножного управления.
В режиме работы автопилота, когда пилот не перемещает органы управления, автопилот посылает управляющий сигнал на рулевые механизмы дублированные 6, при этом входная точка рулевого механизма 6 остается неподвижной, а выходная точка рулевого механизма 6 перемещается на ход, соответствующий сигналу. Таким образом, происходит автоматическая стабилизация вертолета автопилотом.
Так как рулевые механизмы 6 являются дублированными, т.е. состоят из двух независимых друг от друга механизмов рулевых поступательного типа 10, то при выходе из строя одного из механизмов 10, второй продолжает работать в штатном режиме. Таким образом, автоматическая стабилизация вертолета сохраняется.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЁТОМ | 2023 |
|
RU2819837C1 |
| УСТАНОВКА РУЛЕВОГО ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2016 |
|
RU2636195C2 |
| УСТАНОВКА ДУБЛИРОВАННЫХ РУЛЕВЫХ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ НА ГИДРАВЛИЧЕСКИЙ ПРИВОД | 2021 |
|
RU2773301C1 |
| СИСТЕМА ПУТЕВОГО УПРАВЛЕНИЯ ВЕРТОЛЕТА С РУЛЕВЫМ ВИНТОМ | 1983 |
|
SU1208721A1 |
| КОМБИНИРОВАННЫЙ АГРЕГАТ УПРАВЛЕНИЯ | 2012 |
|
RU2532634C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЖИЗНЕННО ВАЖНЫМИ РУЛЕВЫМИ ПОВЕРХНОСТЯМИ САМОЛЕТА | 2014 |
|
RU2572011C1 |
| Система путевого управления вертолета с рулевым винтом | 1975 |
|
SU533008A1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| Блок комбинированных рулевых приводов системы управления летательного аппарата | 1981 |
|
SU1839883A1 |
| СИСТЕМА ГИДРАВЛИЧЕСКАЯ ВЕРТОЛЕТА | 2019 |
|
RU2723526C1 |
Изобретение относится к области авиации, в частности к системам управления вертолетом. Система управления вертолетом содержит органы управления, такие как ручки (2), рычаги (3) управления и связанные с гидродемпфером (7) педали (4), а также проводку (1), соединяющую органы управления с несущим и рулевым винтами. В проводке ручного управления расположены двухкамерные рулевые приводы (5) и рулевые механизмы дублированные (6). Каждый двухкамерный рулевой привод (5) состоит из гидродвигателя (17), двух блоков управления (18), рычажного механизма (19) и входного звена (20). Кроме того, каждый рулевой механизм дублированный (6) с одной стороны закреплен к тягам управления (8), идущим от ручки (2) и педалей (4) пилота, а с другой стороны через качалки закреплен к входным тягам (9) двухкамерного рулевого привода (5). Рулевой механизм дублированный (6) состоит из двух механизмов рулевых поступательного типа (10), каждый из которых состоит из контроллера (11) и исполнительного механизма рулевого поступательного типа (12), подключенного к электрическому кабелю (13). Достигается повышение безопасности полета, улучшение управляемости, снижение нагрузки на пилота. 1 з.п. ф-лы, 6 ил.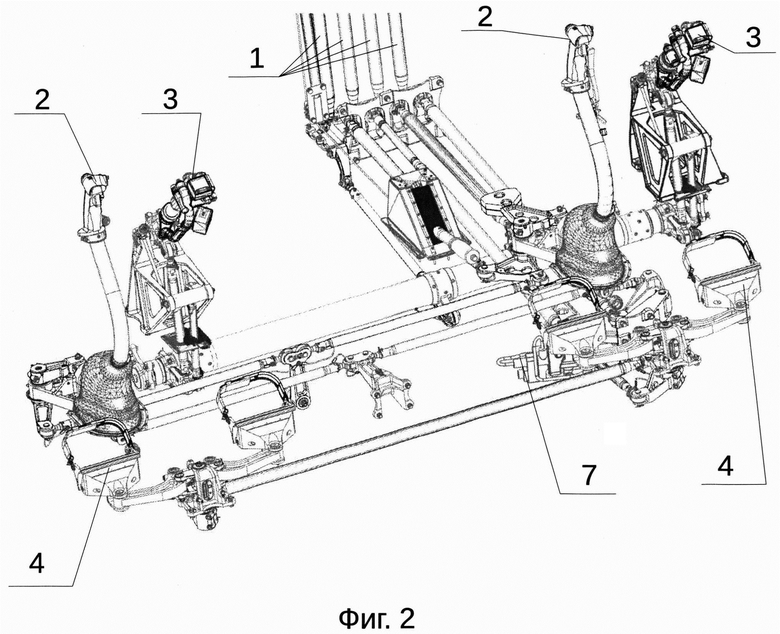
1. Система управления вертолетом, содержащая органы управления, такие как ручки (2), рычаги (3) управления и связанные с гидродемпфером (7) педали (4), а также проводку (1), соединяющую органы управления с несущим и рулевым винтами, отличающаяся тем, что в проводке управления установлены двухкамерные рулевые приводы (5) и рулевые механизмы дублированные (6), причем каждый двухкамерный рулевой привод (5) состоит из гидродвигателя (17), двух блоков управления (18), рычажного механизма (19) и входного звена (20), при этом каждый рулевой механизм дублированный (6) с одной стороны закреплен к тягам управления (8), идущим от ручки (2) и педалей (4) пилота, а с другой стороны через качалки закреплен к входным тягам (9) двухкамерного рулевого привода (5).
2. Система управления вертолетом по п. 1, отличающаяся тем, что рулевой механизм дублированный (6) состоит из двух механизмов рулевых поступательного типа (10), каждый из которых состоит из контроллера (11) и исполнительного механизма рулевого поступательного типа (12), подключенного к электрическому кабелю (13).
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| ФАРМАЦЕВТИЧЕСКАЯ КОМПОЗИЦИЯ ДЛЯ НАРУЖНОГО ПРИМЕНЕНИЯ | 2006 |
|
RU2415669C2 |
| СЛЕДЯЩИЙ ГИДРОПРИВОД ДЛЯ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1984 |
|
SU1840015A1 |
| US 4243358 A1, 06.01.1981 | |||
| Блок комбинированных гидроприводов | 2018 |
|
RU2685115C1 |

