ОБЛАСТЬ ПРИМЕНЕНИЯ
Изобретение имеет отношение к устройству управления двигателем, способу управления двигателем, устройством запуска двигателя и транспортным средством, в частности к управлению с целью предотвращения ошибочного определения угла поворота коленчатого вала в момент запуска двигателя.
УРОВЕНЬ ТЕХНИКИ
Для целей снижения расхода топлива и выбросов отработанных газов в окружающую среду в транспортных средствах, имеющих двигатель внутреннего сгорания или подобные двигатели, некоторые транспортные средства оборудованы так называемым выключателем холостых оборотов или снабжены функцией экономичного режима работы, предназначенными для автоматической остановки двигателя при остановке транспортного средства и нажатии водителем на педаль тормоза, а также для повторного автоматического пуска двигателя в ответ на выполнение водителем операции пуска таким образом, что усилие нажатия на педаль тормоза сводится к нулю.
Кроме того, некоторые стартеры для пуска двигателя могут независимо приводить в действие механизм зацепления для зацепления ведущей (именуемой также «второй») шестерни стартера с ведомой (именуемой также «первой») шестерней двигателя и привод для вращения ведущей шестерни. Также, в момент пуска двигателя, двигатель можно завести с использованием привода после зацепления ведущей шестерни стартера с ведомой шестерней.
Кроме того, некоторые стартеры для пуска двигателя могут независимо приводить в действие механизм зацепления для зацепления ведущей шестерни стартера с ведомой шестерней двигателя и привод для вращения ведущей шестерни.
Патент ЕР2159410А (D1) содержит описание системы управления стартером двигателя, где стартер может независимо управлять ведущей шестерней и приводом для вращения ведущей шестерни с использованием переключения, если необходимо повторно запустить двигатель после его остановки, путем переключения между режимом, в котором ведущая шестерня приводится в действие до привода, и режимом, при котором перед приводом ведущая шестерня приводится в действие в соответствии со скоростью вращения двигателя.
СПИСОК ПРОТИВОПОСТАВЛЕННЫХ МАТЕРИАЛОВ
ПАТЕНТНАЯ ЛИТЕРАТУРА
Документ 1 (D1): патент ЕР2159410А
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
Поскольку время открытия/закрытия клапана и время зажигания регулируются в устройстве управления, контролирующем работу двигателя, по величине угла поворота коленчатого вала (crank angle), двигатель обычно оснащается датчиком угла поворота для определения вращения коленчатого вала.
Как описывалось выше, во время пуска двигателя, когда используется способ, при котором ведущая шестерня стартера находится в зацеплении с ведомой шестерней двигателя, а привод стартера приводится в действие, чтобы вращать коленчатый вал, в сигнале, поступающем от датчика угла поворота, могут появиться шумы, вызванные кратковременной вибрацией, возникающей в момент сцепления ведущей шестерни с ведомой шестерней, в зависимости от положения, в котором остановился коленчатый вал во время остановки двигателя.
При возникновении такого шума, его определяют путем вычисления угла поворота коленчатого вала в устройстве управления, учитывая шум, как если бы коленчатый вал вращался, даже несмотря на то что в действительности он не вращается. Соответственно, угол поворота коленчатого вала, определенный устройством управления, может быть смещен относительно фактического угла поворота коленчатого вала.
В данном случае, при управлении двигателем, осуществляемом контрольным прибором, время регулирования открытия/закрытия клапана, зажигания и т.п. может быть смещено относительно надлежащего момента, что может ухудшить эффективность использования топлива и характеристики выброса отработанных газов в окружающую среду.
Настоящее изобретение создано для решения вышеуказанных проблем, и задача настоящего изобретения состоит в предотвращении ошибочного определения угла поворота коленчатого вала, обусловленного шумом, возникающим в датчике угла поворота в момент запуска двигателя.
РЕШЕНИЕ ПРОБЛЕМЫ
В соответствии с настоящим изобретением устройство управления двигателем служит в качестве устройства управления двигателем, снабженным стартером, содержащим вторую шестерню, которая может быть введена в зацепление с первой шестерней, присоединенной к коленчатому валу;
исполнительный механизм, вызывающий в рабочем состоянии перемещение второй шестерни в положение, в котором вторая шестерня находится в зацеплении с первой шестерней; а также привод, вызывающий вращение второй шестерни. Двигатель снабжен детектором для определения вращения коленчатого вала. Устройство управления обновляет величину угла поворота коленчатого вала, определенного устройством управления на основании сигнала, поступающего от детектора после приведения в действие исполнительного механизма и после приведения в действие привода.
В предпочтительном варианте устройство управления ограничивает обновление величины угла поворота коленчатого вала на основании сигнала, полученного от детектора в промежуток времени от момента приведения в действие исполнительного механизма до момента приведения в действие привода.
В предпочтительном варианте исполнительный механизм и привод независимо контролируются устройством управления.
В предпочтительном варианте устройство управления приводит в действие привод, когда исчезает шум, содержащийся в сигнале детектора, после начала приведения в действие исполнительного механизма.
В предпочтительном варианте устройство управления определяет, что шум исчезает, когда сигнал, поступающий от детектора, не изменяется в течение заранее заданного периода времени после начала приведения в действие исполнительного механизма.
В предпочтительном варианте устройство управления выдает сигнал для приведения в действие исполнительного механизма. В стартере привод приводится в действие в ответ на завершение работы исполнительным механизмом.
В предпочтительном варианте устройство управления управляет двигателем, базируясь на обновленном угле поворота коленчатого вала.
В предпочтительном варианте коленчатый вал снабжен детекторной пластиной, вращающейся вместе с коленчатым валом. Детектор генерирует импульсный сигнал путем обнаружения зубца на периферии детекторной пластины. Устройство управления считывает импульсный сигнал, выработанный детектором для обновления значения угла поворота коленчатого вала.
В соответствии с настоящим изобретением устройство запуска двигателя включает в себя стартер и устройство управления, упомянутые выше.
Способ управления двигателем, в соответствии с настоящим изобретением, представляет собой способ управления двигателем, оснащенным стартером, содержащим вторую шестерню, которая может вводиться в зацепление с первой шестерней, присоединенной к коленчатому валу;
исполнительный механизм, вызывающий в рабочем состоянии перемещение второй шестерни в положение, в котором вторая шестерня зацепляется с первой шестерней; а также привод, вызывающий вращение второй шестерни. Двигатель снабжен детектором для определения вращения коленчатого вала. Способ управления включает в себя этапы: приведение в действие исполнительного механизма; а также обновление значения угла поворота коленчатого вала, базируясь на сигнале, поступающем от детектора после приведения в действие исполнительного механизма и привода.
В соответствии с настоящим изобретением транспортное средство содержит стартер, детектор и устройство управления, для управления стартером. Стартер содержит вторую шестерню, которая может вводиться в зацепление с первой шестерней, присоединенной к коленчатому валу; исполнительный механизм, вызывающий во время работы от привода перемещение второй шестерни в положение, в котором вторая шестерня находится в зацеплении с первой шестерней; а также привод, вызывающий вращение второй шестерни. Детектор определяет вращение коленчатого вала. Устройство управления обновляет величину угла поворота коленчатого вала, определяемого устройством управления на основе сигнала, поступающего от детектора после приведения в действие исполнительного механизма и привода.
ДОСТИГАЕМЫЙ ТЕХНИЧЕСКИЙ РЕЗУЛЬТАТ
В соответствии с настоящим изобретением, предоставляется возможность предотвращения ошибочного определения угла поворота коленчатого вала, обусловленного шумом, вызванным датчиком угла поворота в момент запуска двигателя, которое может привести к снижению эффективности сгорания и к необходимости воздействия на параметры выбросов отработанных газов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг.1 представлена полная блок-схема транспортного средства, оборудованного устройством управления двигателем в соответствии с первым примером осуществления настоящего изобретения.
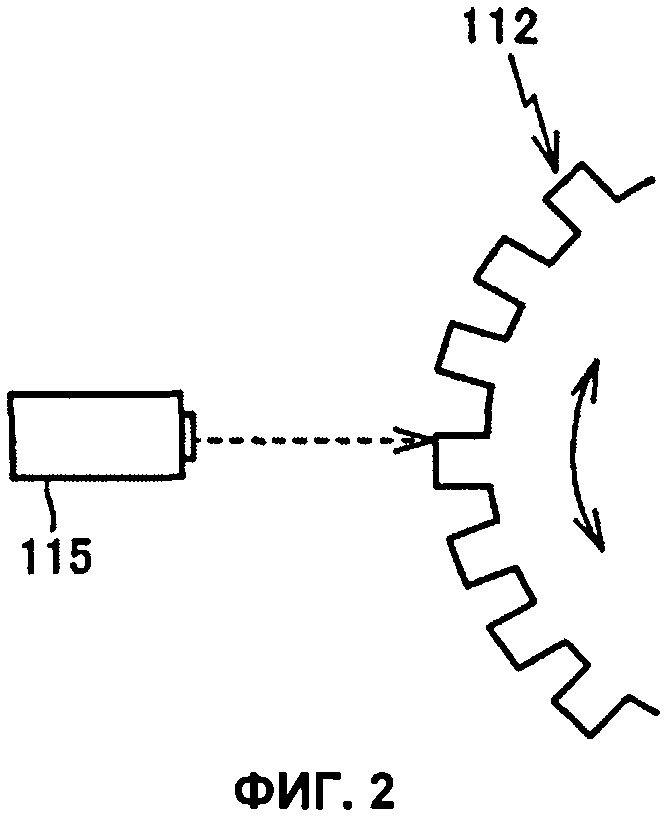
На Фиг.2 представлена схема, иллюстрирующая проблемы определения угла поворота коленчатого вала.
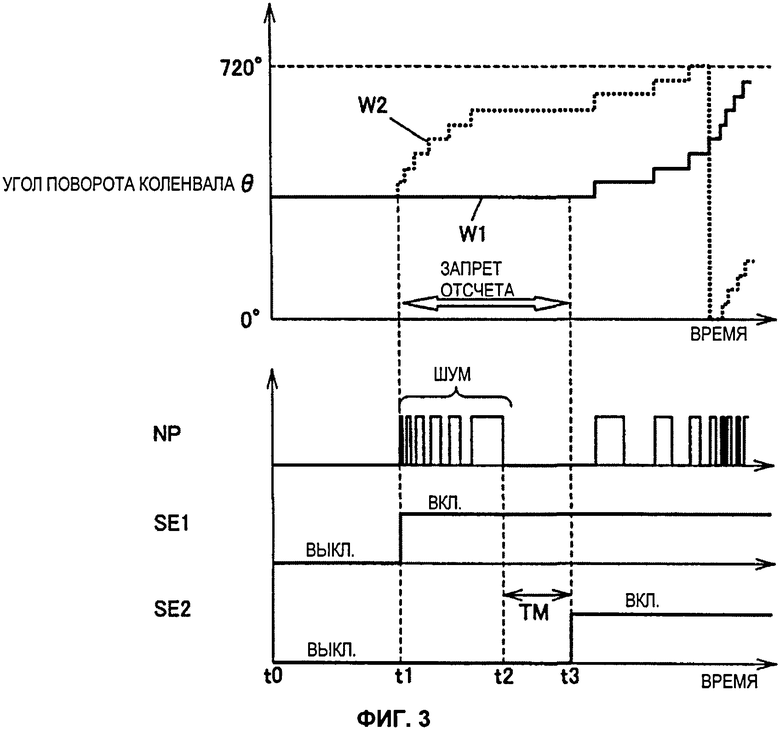
На Фиг.3 представлена временная диаграмма, иллюстрирующая основные принципы управления приводом стартера в соответствии с первым примером осуществления настоящего изобретения.
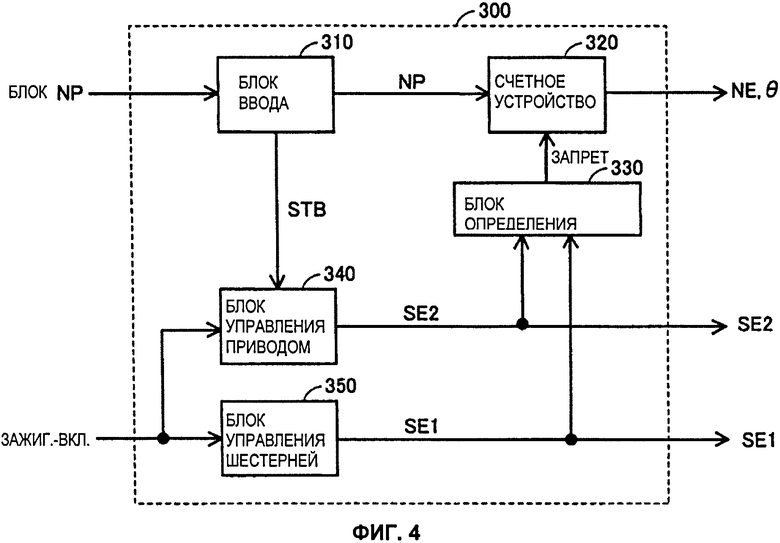
На Фиг.4 показана функциональная блок-схема, иллюстрирующая управление приводом стартера, выполняемого ECU блоком (электронным управляющим блоком) в соответствии с первым примером осуществления настоящего изобретения.
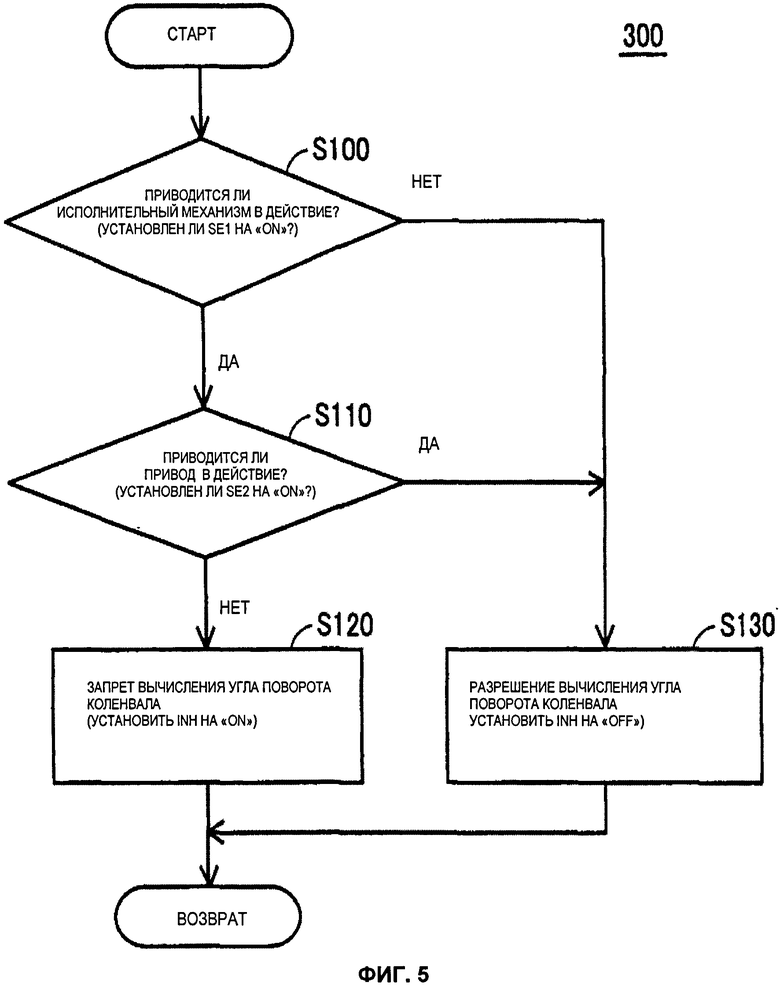
На Фиг.5 показана блок-схема, иллюстрирующая процесс, осуществляемый в ECU блоке для определения возможности расчета угла поворота коленчатого вала в соответствии с первым примером осуществления изобретения.
На Фиг.6 показана блок-схема, иллюстрирующая процесс управления приводом стартера, выполняемый в ECU блоке в соответствии с первым примером осуществления настоящего изобретения.
На Фиг.7 представлена полная блок-схема транспортного средства, оборудованного устройством управления для двигателя в соответствии со вторым примером осуществления настоящего изобретения.
ОПИСАНИЕ ПРИМЕРОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Примеры осуществления настоящего изобретения будут в дальнейшем рассмотрены со ссылкой на сопроводительные чертежи. В приведенном далее описании, аналогичные компоненты обозначены одинаковыми номерами позиций. Их наименование и функции также являются одинаковыми. Соответственно, их подробное описание повторяться не будет.
[Первый пример осуществления изобретения]
На Фиг.1 представлена полная блок-схема транспортного средства 10, оборудованного устройством управления двигателя в соответствии с первым примером осуществления настоящего изобретения. Согласно Фиг.1, транспортное средство 10 включает в себя двигатель 100, аккумуляторную батарею 120, стартер 200, устройство управления (которое далее по тексту будет также упоминаться как ECU блок (электронный управляющий блок)) 300, а также реле RY1 и RY2. Стартер 200 содержит плунжер 210, привод 220, соленоид 230, соединитель 240, выходное звено 250 и ведущую шестерню 260.
Двигатель 100 генерирует движущую силу для приведения в движение транспортного средства 10. Коленчатый вал 111 двигателя 100 соединен с ведущим колесом через силовой агрегат, включающий в себя сцепление, понижающую передачу и т.п.
В двигателе 100 установлен датчик угла поворота 115. Датчик угла поворота 115 обнаруживает кромку зубца, расположенного на периферии пластины датчика 112, вращающейся совместно с коленчатым валом 111. Затем датчик угла поворота 115 вырабатывает импульсный сигнал (NP), соответствующий обнаружению зубца пластины датчика 112, и выдает сигнал в ECU блок 300.
Аккумуляторная батарея 120 - это заряжаемый и разряжающийся компонент накопления электрической энергии. Аккумуляторная батарея 120 скомпонована с возможностью включения в ее состав вторичной батареи, например литиево-ионной батареи, никель-металлогидридной батареи или свинцово-кислотной батареи. Аккумуляторная батарея 120 может быть также сформирована из элемента накопления энергии, например конденсатор с двойным электрическим слоем.
Аккумуляторная батарея 120 соединена со стартером 200 через реле RY1 и RY2, управляемыми ECU блоком 300. Аккумуляторная батарея 120 подает напряжение питания для приведения в действие стартера 200 путем замыкания контактов реле RY1 и RY2. Отрицательная клемма аккумуляторной батарей 120 заземлена.
Аккумуляторная батарея 120 снабжена датчиком напряжения 125. Датчик напряжения 125 определяет выходное напряжение VB аккумуляторной батареи 120 и передает измеренное значение в ECU блок 300.
Напряжение от аккумуляторной батареи 120 подается в ECU блок 300, а также на вспомогательное оборудование, например на инвертор кондиционера или подобное устройство, через преобразователь постоянного тока 127.
Реле RY1 одним концом соединено с положительным электродом аккумуляторной батареи 120, а другим своим концом оно соединено с одним из концов соленоида 230 в стартере 200. Управление реле RY1 осуществляется сигналом управления SE1, поступающим от ECU блока 300 для выбора положений либо подачи напряжения питания от аккумуляторной батареи 120 на соленоид 230, либо отключения такой подачи напряжения питания.
Реле RY2 одним своим концом соединено с положительным электродом аккумуляторной батареи 120, а другой его конец присоединен к приводу 220 в стартере 200. Реле RY2 управляется посредством сигнала управления SE2, поступающего от ECU блока 300, чтобы включать и выключать подачу напряжения питания на привод 220 от аккумуляторной батареи 120.
Контроль подачи напряжения питания на привод 220 и соленоид 230 в стартере 200 может осуществляться независимо при помощи реле RY2 и RY1, соответственно.
Выходное звено 250 присоединено к валу вращения ротора (не показано) в приводе при помощи, например, продольного шлица и т.п. Далее, на конце выходного звена 250, со стороны, противоположной приводу 220, установлена ведущая шестерня 260. При подаче напряжения питания от аккумуляторной батареи 120 путем замыкания контактов реле RY2 для вращения привода 220, выходное звено 250 передает вращательное действие ротора ведущей шестерне 260 для ее вращения.
Как указывалось выше, один конец соленоида 230 соединен с реле RY1, а другой его конец заземлен. При замыкании контактов реле RY1 для возбуждения соленоида 230, соленоид 230 перемещает плунжер 210 в направлении по стрелке. Таким образом, плунжер 210 и соленоид 230 составляют исполнительный механизм 232.
Плунжер 210 соединен с выходным звеном 250 через соединитель 240. Соленоид 230 приводится в возбуждение, чтобы перемещать плунжер 210 в направлении по стрелке. Таким образом, выходное звено 250 перемещается соединителем 240, имеющим фиксированную опору 245, из положения готовности, показанного на Фиг.1, в направлении, противоположном направлению движения плунжера 210, то есть в направлении перемещения ведущей шестерни 260 с удалением от корпуса привода 220. Когда соленоид 230 переходит в невозбужденное состояние, плунжер 210 под воздействием силы, создаваемой пружинным механизмом (не показан), смещается в направлении, противоположном направлению, указанному стрелкой на Фиг.1, и возвращается в положение готовности.
При перемещении выходного звена 250 в направлении по оси путем возбуждения соленоида 230, ведущая шестерня 260 входит в зацепление с ведомой шестерней 110 установленного на наружной окружности маховика или ведущего диска, прикрепленного к коленчатому валу 111 двигателя 100. Вращательным движением ведущей шестерни 260, находящейся в зацеплении с ведомой шестерней 110, производится запуск двигателя 100.
В соответствии с первым примером осуществления настоящего изобретения исполнительный механизм 232, перемещающий ведущую шестерню 260 для ее ввода в зацепление с ведомой шестерней 110, установленной на наружной окружности маховика или ведущего диска двигателя 100, и привод 220, который приводит ведущую шестерню 260 во вращение, управляются независимо.
Несмотря на то что на Фиг.1 это не показано, между выходным звеном 250 и валом ротора привода 220 может быть установлена односторонняя муфта для предотвращения вращения ротора привода 220 под действием вращательного движения ведомой шестерни 110.
Исполнительный механизм 232, показанный на Фиг.1, не ограничивается вышеуказанным механизмом при условии, что вращение ведущей шестерни 260 может быть передано ведомой шестерне 110 и имеется возможность переключения между состояниями наличия зацепления и отсутствия зацепления ведущей шестерни 260 с ведомой шестерней 110. Например, может быть задействован механизм, в котором зацепление ведущей шестерни 260 и ведомой шестерни 110 достигнуто перемещением вала выходного звена 250 в радиальном направлении ведущей шестерни 260.
Несмотря на то что это не показано, ECU блок 300 включает в себя центральный процессор (далее ЦП), запоминающее устройство и буфер ввода-вывода для приема входных данных от каждого датчика и формирования команд управления для каждого устройства. Управление здесь не ограничивается обработкой данных с применением программного обеспечения, а часть указанных данных может быть обработана путем разработки специализированного аппаратного обеспечения (электронной схемы).
ECU блок 300 принимает сигнал от педали акселератора (АСС), представляющий величину воздействия педали газа 140, от датчика (не показан), установленного на педали газа 140. ECU блок 300 принимает сигнал от педали тормоза (BRK), представляющий величину воздействия тормозной педали 150, от датчика (не показан), установленного на тормозной педали 150. ECU блок 300 также принимает сигнал начала работы устройства включения зажигания IG-ON при выполнении водителем операции включения зажигания или подобной этому операции. ECU блок 300 генерирует сигнал запроса пуска или сигнал запроса остановки двигателя 100 на основании такой информации и выдает сигналы управления SE1 и SE2 в соответствии с сигналами, формируемыми для управления работой стартера 200.
Например, когда задано условие остановки останавливаемого транспортного средства и тормозная педаль 150 нажата водителем, вырабатывается сигнал запроса остановки и ECU блок 300 останавливает двигатель 100. Другими словами, когда задано условие остановки, впрыск и сжигание топлива в двигателе 100 прекращаются.
Позже, когда водителем, чтобы достичь ноль, задается начальное условие величины воздействия тормозной педали 150, вырабатывается сигнал запроса запуска и ECU блок 300 управляет приводом 220 для пуска двигателя 100. В альтернативном случае, двигатель 100 может быть запущен в ответ на нажатие на педаль газа 140, на перемещение рычага переключения передач или коробки передач или на работу переключателя для выбора режима работы транспортного средства (например, мощностной режим или экономичный режим и т.п.).
Обычно, величина угла поворота коленчатого вала двигателя 100 в ECU блоке 300 может быть обновлена путем обнаружения кромки зубца в пластине датчика 112, имеющей форму зубчатого колеса, установленного на коленчатом вале 111, например, используя датчик угла поворота 115, такой как датчик расстояния, и подсчитывая импульсные сигналы, генерируемые кромками при помощи ECU блока 300.
В качестве альтернативы (не показано), пластина датчика, имеющая щелевидное отверстие в окружном направлении, может быть использована для обнаружения света, проникающего через щель, вырабатывая тем самым импульсный сигнал, аналогичный описанному выше сигналу.
В такой конфигурации, когда стартер 200 приводится в действие для запуска двигателя 100 с целью введения ведущей шестерни 260 в зацепление или в соприкосновение с ведомой шестерней 110, контакт ведущей шестерни 260 и ведомой шестерни 110 может вызвать кратковременные колебания коленчатого вала 111 в направлении вращения.
В данном случае, как показано на Фиг.2, когда двигатель остановлен в состоянии, при котором датчик угла поворота 115 обнаружил колено вала в непосредственной близости от кромки зубца пластины датчика 112, датчик угла поворота 115 может обнаружить эту же кромку зубца более одного раза из-за указанных кратковременных колебаний коленчатого вала 111. Это может вызвать ошибочное определение в ECU блоке 300 того, что коленчатый вал поворачивается, из-за шума от множества импульсных сигналов, вызванных, когда датчик угла поворота 115 обнаруживает ту же самую кромку зубца более одного раза.
На основании угла поворота коленчатого вала, ECU блок 300 управляет регулированием по времени открытия/закрытия впускного клапана и клапана выпуска, регулированием времени впрыска, регулированием времени зажигания и т.д. в двигателе 100. Соответственно, когда этот угол поворота коленчатого вала определен ошибочно, надлежащее управление двигателем не может быть осуществлено, что может вызвать ухудшение эффективности двигателя и параметров выброса отработавших газов.
Таким образом, в первом примере осуществления настоящего изобретения, управление приводом стартера осуществляется, как это изложено ниже, с целью предотвращения ошибочного определения угла поворота коленчатого вала, которое может произойти во время запуска двигателя.
На Фиг.3 представлена временная диаграмма, иллюстрирующая основные принципы управления приводом стартера в соответствии с первым примером осуществления настоящего изобретения. На Фиг.3 горизонтальная ось показывает время, в то время как вертикальная ось показывает значения каждого угла поворота коленчатого вала θ, импульсный сигнал NP от датчика угла поворота 115 и сигналы управления SE1 и SE2 для управления реле RY1 и RY2, соответственно.
При рассмотрении Фигур 1 и 3, случай, когда шум не имеет места в импульсном сигнале NP, будет первым из рассматриваемых далее в описании.
Во время t1, когда поступает сигнал начала работы IG-ON, вырабатываемый в результате включения зажигания водителем и т.п., включается сигнал управления SE1 для приведения в действие исполнительного механизма 232. Далее, во время t3, после истечения установленного промежутка времени, в течение которого выполняется работа плунжера 210 исполнительного механизма 232, включается сигнал управления SE2 для приведения в действие привода 220. Это приводит к вращению коленчатого вала 111, и затем импульсный сигнал NP поступает от датчика угла поворота 115.
ECU блок 300 отсчитывает данный импульсный сигнал NP, обновляя таким образом величину угла поворота коленчатого вала θ (линия W1 на Фиг.3).
С другой стороны, в случае, когда двигатель остановлен в состоянии, в котором датчик угла поворота 115 обнаружил зону вала в непосредственной близости от кромки зубца пластины датчика 112, а шум возникает в импульсном сигнале NP из-за вибрации, вызванной зацеплением или соприкосновением ведущей шестерни 260 и ведомой шестерни 110 при приведении в действие исполнительного механизма 232, ECU блок 300 отсчитывает импульс, вызванный указанным шумом. Это вызывает обновление величины угла поворота коленчатого вала θ, как отображено пунктирной линией W2 на Фиг.3, несмотря на это, коленчатый вал 111 фактически не вращается, в результате чего определенный угол поворота коленчатого вала θ в ECU блоке 300 должен сместиться относительно фактического положения.
При управлении приводом стартера в соответствии с первым примером осуществления настоящего изобретения отсчет импульсного сигнала NP подвергается запрету в течение промежутка времени от времени начала приведения в действие исполнительного механизма 232 до времени начала приведения в действие привода 220, то есть в промежуток времени от времени t1 до времени t3 на Фиг.3. Следовательно, даже когда шум импульсного сигнала NP, как описано выше, является входным сигналом, величина угла поворота коленчатого вала θ не обновляется, но поддерживается такой, что ошибочное определение угла поворота коленчатого вала θ, обусловленное шумом, может быть предотвращено.
В дополнение к этому, запрет обновления угла поворота коленчатого вала θ в ECU блоке 300, описанный выше, может быть реализован путем приема ввода импульсного сигнала NP и невыполнением процесса обновления величины угла поворота коленчатого вала θ только в промежутке времени от времени t1 до времени t3 на Фиг.3 или, например, путем установки выключателя на входной части терминала, через который импульсный сигнал NP поступает в ECU блок 300, для предотвращения таким образом приема ввода самого импульсного сигнала NP.
Кроме того, обновление угла поворота коленчатого вала может быть заблокировано не полным запретом отсчета импульсного сигнала NP, а изменением степени вариации угла поворота коленчатого вала θ. Точнее говоря, например, в отличие от обычного случая, где определяется, что угол изменяется на величину α° в одном импульсе импульсного сигнала NP, может быть определено в течение промежутка времени от времени t1 до времени t3 на Фиг.3, что угол изменяется на величину α° в десяти импульсах, и таким образом, чувствительность вариации угла к количеству импульсов импульсного сигнала NP может быть снижена.
Кроме того, в первом примере осуществления настоящего изобретения, в котором шум импульсного сигнала NP, как описано выше, обнаруживается в состоянии, когда исполнительный механизм 232 приводится в действие, а привод 220 не приводится в действие, привод 220 защищен от приведения в действие до момента обнаружения того, что коленчатый вал 111 вошел в стабилизированное состояние по истечении установленного промежутка времени ТМ с момента пропадания шума. Таким образом, становится возможным запустить двигатель после точной фиксации угла поворота коленчатого вала.
На Фиг.4 представлена функциональная блок-схема, иллюстрирующая осуществление управления приводом стартера в ECU блоке 300 в соответствии с первым примером осуществления настоящего изобретения. Каждый функциональный блок, показанный на функциональной блок-схеме на Фиг.4, реализован путем обработки в аппаратном или программном обеспечении через ECU блок 300.
Как показано на Фигурах 1 и 4, ECU блок 300 включает в себя блок ввода 310, счетное устройство 320, блок определения 330, блок управления приводом 340 и блок управления шестерней 350.
Блок ввода 310 получает импульсный сигнал NP от датчика угла поворота 115. Блок ввода 310 передает полученный импульсный сигнал NP в счетное устройство 320.
Кроме того, в состоянии, когда двигатель 100 остановлен (например, состояние, когда не выдается команда управления двигателем), блок ввода 310 определяет, изменяется или нет состояние полученного импульсного сигнала в течение заранее установленного периода времени, то есть стабилизируется или нет угол поворота коленчатого вала, в то время как двигатель остановлен. Далее, блок ввода 310 выдает устойчивый сигнал STB, передающий этот результат определения в блок 340 управления приводом. Точнее говоря, например, когда состояние принятого импульсного сигнала не изменяется в течение заранее установленного периода времени, определяется, что угол поворота коленчатого вала стабилизировался, а затем устойчивый сигнал STB устанавливается на «ON». С другой стороны, когда определено, что угол поворота коленчатого вала не стабилизирован, устойчивый сигнал STB устанавливается на «OFF».
Счетное устройство 320 принимает импульсный сигнал NP от блока ввода 310 и запрещающий сигнал INH от блока определения 330. Запрещающий сигнал INH является сигналом, указывающим, разрешено или нет вычисление угла поворота коленчатого вала θ на основании импульсного сигнала NP, как это будет описано позже. Например, когда запрещающий сигнал INH установлен на «ON», величина угла поворота коленчатого вала θ не изменяется, даже если поступает импульсный сигнал NP. С другой стороны, когда запрещающий сигнал INH установлен на «OFF», угол поворота коленчатого вала θ увеличивается или уменьшается в соответствии с импульсным сигналом NP, таким образом происходит обновление величины угла поворота коленчатого вала θ.
Счетное устройство 320 выдает расчетный угол поворота коленчатого вала θ в блок управления и т.п., осуществляя другие функции управления, например управление двигателем в пределах ECU блока 300. Кроме того, скорость вращения двигателя NE рассчитывается путем расчета временного изменения расчетного угла поворота коленчатого вала.
Блок управления шестерней 350 принимает сигнал начала работы IG-ON, генерируемого включением зажигания пользователем. В дополнение к этому, в случае, когда повторный пуск двигателя происходит автоматически, даже без вмешательства пользователя, как и в случае с транспортным средством, имеющим так называемую функцию выключения холостого хода, гибридным автомобилем и т.п., сигнал начала работы IG-ON включает в себя команду автоматического повторного пуска, как было пояснено выше.
Блок управления шестерней 350 устанавливает сигнал управления SE1 реле RY1 на «ON» в ответ на сигнал начала операции IG-ON и выдает сигнал для управления исполнительным механизмом 232. Кроме того, блок управления шестерней 350 также выдает сигнал управления SE1 для блока определения 330.
Блок управления приводом 340 принимает сигнал начала работы IG-ON и устойчивый сигнал STB от блока ввода 310. В основном, по истечении заранее установленного промежутка времени от времени, когда сигнал начала работы IG-ON включен для приведения в действие исполнительного механизма 232, до времени, когда работа плунжера 210 завершена, блок управления приводом 340 устанавливает сигнал управления SE2 на «ON» и выдает сигнал для приведения, таким образом, в действие привода 220.
Однако, когда устойчивый сигнал STB от блока ввода 310 равен «OFF», то есть когда сигнал от датчика угла поворота 115 изменяется, даже несмотря на то что двигатель 100 остановлен, блок управления приводом 340 не выдает сигнал управления SE2 даже по истечении вышеуказанного заранее установленного промежутка времени. Далее, когда шум, вызванный колебаниями угла поворота коленчатого вала, пропадает, а устойчивый сигнал STB, поступающий от блока ввода 310, устанавливается на «ON», блок управления приводом 340 устанавливает сигнал управления SE2 на «ON» и выдает сигнал начала приведения в действие привода 220. Кроме того, блок управления приводом 340 также выдает сигнал управления SE2 в блок определения 330.
Блок определения 330 принимает сигналы управления SE1 и SE2 от блока управления шестерней 350 и блока управления приводом 340 соответственно. В течение промежутка времени от времени начала приведения в действие исполнительного механизма 232 до времени начала приведения в действие привода 220, то есть когда сигнал управления SE1 установлен на «ON» и сигнал управления SE2 установлен на «OFF», блок определения 330 устанавливает запрещающий сигнал INH на «ON» и выдает сигнал в счетное устройство 320. Как изложено выше, в счетном устройстве 320, даже если получен импульсный сигнал NP от блока ввода 310, угол поворота коленчатого вала не рассчитывается, в то время как запрещающий сигнал INH установлен на «ON».
Далее, как показано на Фигурах 5 и 6, будет дано пояснение со ссылкой на вышеописанный детализированный процесс управления приводом, выполняемый в первом примере осуществления изобретения.
На Фиг.5 представлена блок-схема, иллюстрирующая процесс, осуществляемый в ECU блоке 300 для определения, может или не может быть рассчитан угол поворота коленчатого вала в соответствии с первым примером осуществления изобретения. Блок-схемы, показанные на Фигурах 5 и 6, описание которых дано в последующем тексте, реализованы путем выполнения программы, сохраненной заранее в ECU блоке 300 в заранее установленном цикле. Как вариант, данный процесс может быть также реализован для некоторых шагов путем разработки специализированного аппаратного обеспечения (электронная схема).
Как показано на Фигурах 1 и 5, ECU блок 300 определяет на шаге (далее по тексту указан сокращенно как S) 100, приводится в действие или нет исполнительный механизм 232, то есть включен или нет сигнал управления SE1.
Если исполнительный механизм 232 приводится в действие (ДА на шаге S100), процесс переходит к шагу S110, на котором ECU блок 300 определяет, приводится в действие или нет привод 220, то есть установлен ли на «ON» сигнал управления SE2.
Если привод 220 не приводится в действие (НЕТ на шаге S110), ECU блок 300 определяет, что, как и в промежутке времени от времени t1 до времени t3 на Фиг.3, существует возможность возникновения шумового сигнала на выходе датчика угла поворота 115 по причине соприкосновения ведущей шестерни 260 и ведомой шестерни 110. Далее, ECU блок 300 устанавливает запрещающий сигнал INH на «ON», чтобы запретить вычисление угла поворота коленчатого вала θ на шаге S120.
С другой стороны, если исполнительный механизм 232 не приводится в действие (НЕТ на шаге S100) или если привод 220 приводится в действие (ДА на шаге S110), определяется, что ведущая шестерня 260 и ведомая шестерня 110 не соприкасаются друг с другом или ведущая шестерня 260 и ведомая шестерня 110 уже были введены в зацепление друг с другом и двигатель 100 запущен. Соответственно, ECU блок 300 определяет, что ошибочное определение угла поворота коленчатого вала по шумовому сигналу вряд ли возможно, а затем он устанавливает запрещающий сигнал INH на «OFF». Это делает возможным разрешение вычисления угла поворота коленчатого вала.
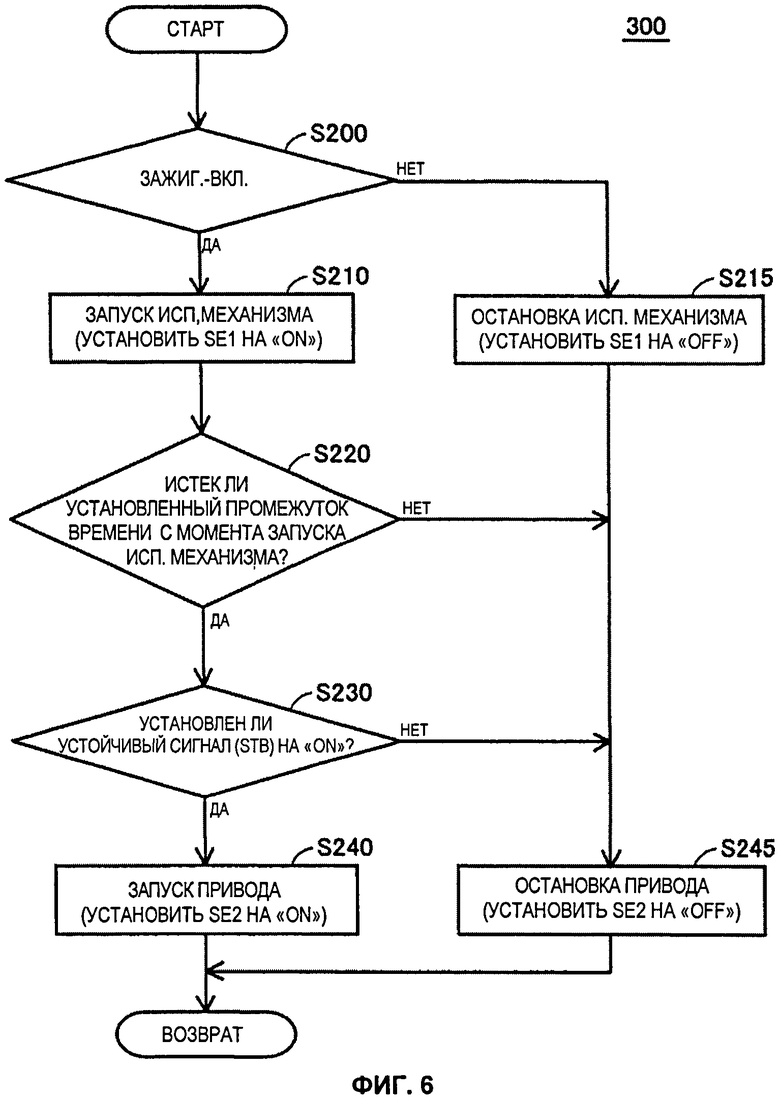
На Фиг.6 представлена блок-схема, иллюстрирующая выполнение процесса приведения в действие стартера в ECU блоке 300 в соответствии с первым примером осуществления настоящего изобретения.
Как показано на Фигурах 1 и 6, ECU блок 300 определяет на шаге S200, получен или не получен сигнал начала операции IG-ON (включение зажигания).
Если сигнал начала операции IG-ON не был получен (НЕТ на шаге S200), определяется, что запуск двигателя 100 не требуется или запуск двигателя 100 уже был осуществлен. Соответственно, ECU блок 300 переходит к процессу на шаге S215, т.е. остановке работы исполнительного механизма 232 (то есть устанавливает сигнал управления SE1 на «OFF»), а затем переходит к процессу на шаге S245, т.е. прекращению работы привода 220 (устанавливает сигнал управления SE2 на «OFF»).
Если сигнал начала операции IG-ON был получен (ДА на шаге S200), происходит переход к процессу на шаге S210, в ходе которого ECU блок 300 приводит в действие исполнительный механизм 232 (то есть устанавливает сигнал управления SE1 на «ON»), чтобы запустить двигатель 100. Далее, ECU блок 300 определяет на шаге S220, истек или нет заранее определенный промежуток времени с момента начала приведения в действие исполнительного механизма 232. Указанный заранее определенный промежуток времени определяется, как указано выше, на основании промежутка времени от момента, когда начинается работа плунжера 210, до момента, когда эта работа заканчивается. Заранее определенный промежуток времени может быть фиксированным периодом времени или, например, может быть установлен изменяемым в соответствии с выходным напряжением аккумуляторной батареи 120 для подачи электропитания с целью приведения в действие исполнительного механизма 232.
Если заранее определенный промежуток времени истек с момента начала приведения в действие исполнительного механизма 232 (ДА на шаге S220), процесс переходит к шагу S230, в ходе которого ECU блок 300 определяет, установлен ли устойчивый сигнал STB на «ON», то есть пропали или нет колебания угла поворота коленчатого вала, а также стабилизирован или нет импульсный сигнал NP, поступающий от датчика угла поворота 115.
Если устойчивый сигнал STB установлен на «ON» (ДА на шаге S230), ECU блок 300 определяет, что коленчатый вал 111 стабилизируется после введения ведущей шестерни 260 в зацепление или в соприкосновение с ведомой шестерней 110. Далее, ECU блок 300 переходит к процессу на шаге S240 и устанавливает сигнал управления SE2 на «ON», приводя тем самым привод 220 в действие.
С другой стороны, если не истек заранее определенный промежуток времени с момента начала приведения в действие исполнительного механизма 232 (НЕТ на шаге S220), предполагается, что плунжер 210 исполнительного механизма 232 находится в среднем положении при выполнении операции. Соответственно, сигнал управления SE2 поддерживается в состоянии «OFF» так, чтобы поддерживать привод 220 в остановленном состоянии.
Кроме того, если устойчивый сигнал STB установлен на «OFF» (НЕТ на шаге S230), ECU блок 300 определяет, что ведущая шестерня 260 соприкасается с ведомой шестерней 110, обусловливая вибрацию коленчатого вала 111. Соответственно, если привод 220 поддерживается таким образом в работающем состоянии, ведущая шестерня 260 и ведомая шестерня 110 не могут быть введены в зацепление друг с другом надлежащим образом, а также может усилиться шум, вызванный соприкосновением ведущей шестерни 260 и ведомой шестерни 110. Поэтому ECU блок 300 переходит к процессу на шаге S245 для удержания привода 220 в остановленном состоянии.
При осуществлении управления в соответствии с процессом, изложенным выше, вычисление угла поворота коленчатого вала запрещается в случае, когда присутствует шумовой сигнал, поступающий от датчика угла поворота, обусловленный вибрацией коленчатого вала. Следовательно, предотвращается ошибочное определение угла поворота коленчатого вала, являющееся результатом наличия шумового сигнала. Кроме этого, поскольку приведение в действие привода запрещено, в то время как возникает вибрация в коленчатом вале, становится возможным предотвратить ускорение износа, увеличение шума и т.п., вызванные приведением в действие привода в состоянии, когда ведущая шестерня и ведомая шестерня находятся в ненадлежащем зацеплении друг с другом.
[Второй пример осуществления настоящего изобретения]
В вышеизложенном описании был приведен случай, когда стартер может управлять исполнительным механизмом и приводом независимо.
Однако управление приводом стартера, описание которого дано в первом примере осуществления настоящего изобретения, также применимо к такому типу стартера, в котором только приведение в действие исполнительного механизма может быть проконтролировано ECU блоком, а приведение в действие привода осуществляется по завершении приведения в действие исполнительного механизма.
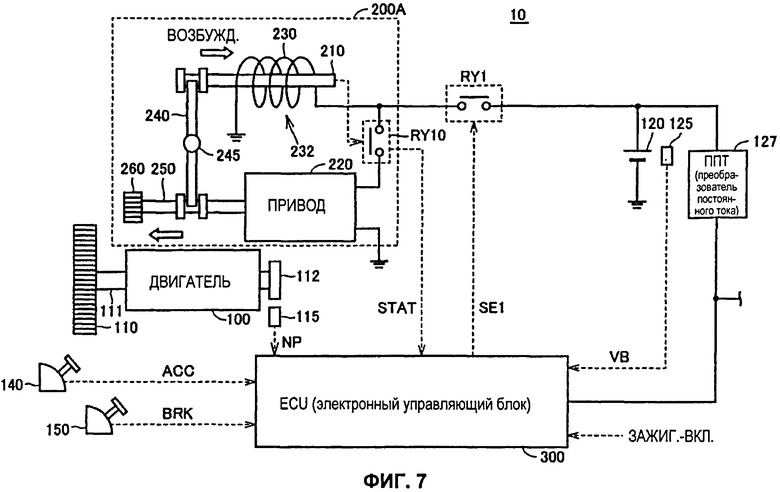
На Фиг.7 представлена полная блок-схема транспортного средства 10, оборудованного устройством управления двигателя в соответствии со вторым примером осуществления настоящего изобретения. На Фиг.7 в отличие от Фиг.1 реле RY2, приводящее в действие привод 220, удалено, а вместо него установлено реле RY10 в составе стартера 200А. Элементы, аналогичные тем, что представлены на Фиг.1, не будут отображены на Фиг.7.
Как показано на Фиг.7, один конец реле RY10 подключен к соединительному узлу между реле RY1 для приведения в действие исполнительного механизма 232 и соленоидом 230, а другой его конец соединен с контактом подачи питания на привод 220.
В ответ на завершение работы плунжера 210 до окончания работы приведенного в действие соленоидом 230 исполнительного механизма 232, реле RY10 механически или электрически замыкает свои контакты. В результате этого, электропитание управления подается на привод 220 для приведения его в действие. При этом реле RY10 выдает для ECU блока 300 сигнал STAT, показывая открытое/закрытое состояние контактов.
В стартере 200А, имеющем вышеприведенную комплектацию, поскольку синхронизация приводного двигателя 220 зависит от работы исполнительного механизма 232, управление работой исполнительного механизма 232 и работой привода 220 не может осуществляться независимо, в отличие от стартера 200 на Фиг.1.
Однако даже в случае, когда стартер 200А имеет вышеуказанную комплектацию, ошибочное определение угла поворота коленчатого вала может иметь место аналогично тому, как описано выше, из-за сигнала шума, поступающего от датчика угла поворота 115, вызванного вибрацией, возникающей при зацеплении или соприкосновении ведущей шестерни 260 с ведомой шестерней 110 в ходе приведения в действие исполнительного механизма 232.
Соответственно, во втором примере осуществления настоящего изобретения, до момента обнаружения по состоянию сигнала STAT, поступающего от реле RY10, что сработало реле RY10, по причине начала приведения в действие исполнительного механизма 232 (то есть после установки сигнала управления SE1 на «ON»), ECU блок 300 поддерживает величину угла поворота коленчатого вала равной величине, полученной перед приведением в действие исполнительного механизма 232, и блокирует вычисление угла поворота коленчатого вала с использованием сигнала, полученного от датчика угла поворота 115. Таким образом, как и в первом примере осуществления изобретения, становится возможным предотвратить ошибочное определение угла поворота коленчатого вала, обусловленное шумовым сигналом, поступающим от датчика угла поворота 115, вызванным вибрацией, возникающей при зацеплении или соприкосновении ведущей шестерни 260 с ведомой шестерней 110.
Следует понимать, что приведенные в данном описании примеры осуществления настоящего изобретения являются иллюстративными и ни в коей мере не ограничивают его. Объем настоящего изобретения определен содержанием пунктов формулы изобретения, а не приведенным выше описанием, и в него могут быть внесены изменения, которые не выходят за пределы сущности и объема изобретения, определенные формулой изобретения.
ПЕРЕЧЕНЬ ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
10 - транспортное средство, 100 - двигатель, 110 - ведомая шестерня, 111 - коленчатый вал, 112 - пластина датчика, 115 - датчик угла поворота, 120 - аккумуляторная батарея, 125 - датчик напряжения, 127 - преобразователь постоянного тока, 140 - педаль газа, 150 - педаль тормоза, 200, 200А - стартер, 210 - плунжер, 220 - привод, 230 - соленоид, 232 - исполнительный механизм, 240 - соединитель, 245 - опора, 250 - выходное звено, 260 - ведущая шестерня, 300 - ECU блок, 310 - блок ввода, 320 - счетное устройство, 330 - блок определения, 340 - блок управления приводом, 350 - блок управления шестерней, RY1, RY2, RY10 - реле.
Группа изобретений относится к управлению двигателем транспортного средства. Устройство управления двигателем ограничивает обновление величины угла поворота коленчатого вала на основе сигнала от детектора вращения коленчатого вала в течение периода времени от времени, когда приводится в рабочее состояние исполнительный механизм перемещения шестерни стартера, до времени, когда приводится в рабочее состояние привод, вращающий шестерню стартера.
Также устройство управления обновляет угол поворота коленчатого вала после завершения зацепления между шестернями коленчатого вала и стартера. Изобретение также относится к
устройству запуска двигателя, содержащему
стартер и
вышеуказанное устройство управления, а также к способу управления в соответствии с вышеуказанным устройством управления и транспортному средству. Предотвращается ошибочное определение угла поворота коленчатого вала, обусловленное возникающим шумом в датчике угла поворота. 6 н. и 6 з.п. ф-лы, 7 ил.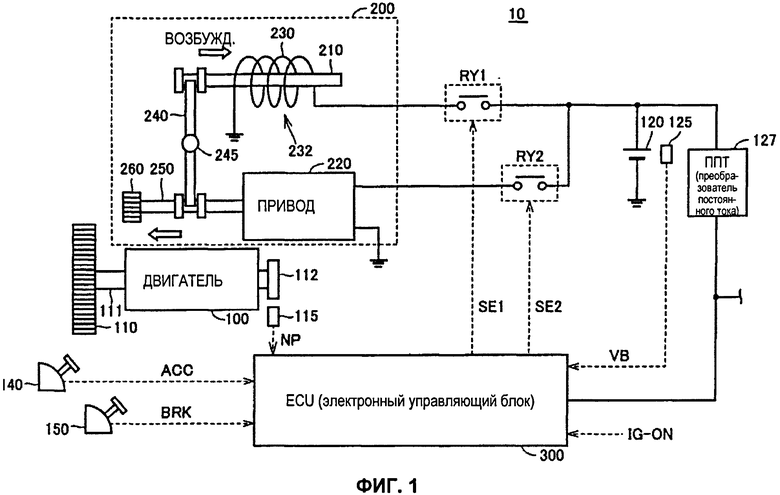
1. Устройство управления двигателем, оборудованным стартером (200, 200А), содержащим вторую шестерню (260), которая может быть введена в зацепление с первой шестерней (110), присоединенной к коленчатому валу (111); исполнительный механизм (232), вызывающий в рабочем состоянии перемещение указанной второй шестерни (260) в положение, в котором указанная вторая шестерня (260) вводится в зацепление с указанной первой шестерней (110); и привод (220), приводящий во вращение указанную вторую шестерню (260),
указанный двигатель (100) оборудован детектором (115) для определения вращения указанного коленчатого вала (111),
указанное устройство управления (300), обновляющее величину угла поворота указанного коленчатого вала (111), определенную указанным устройством управления (300) на основе сигнала, поступающего от указанного детектора (115), после того как приводится в действие исполнительный механизм (232) и приводится в действие привод (220),
указанное устройство управления (300), ограничивающее обновление величины угла поворота, на основе сигнала от указанного детектора (115) в течение периода времени от времени, когда приводится в рабочее состояние указанный исполнительный механизм (232), до времени, когда приводится в рабочее состояние указанный привод (220).
2. Устройство управления для двигателя в соответствии с п.1, в котором указанный исполнительный механизм (232) и указанный привод (220) управляются независимо при помощи указанного управляющего устройства (300).
3. Устройство управления двигателем в соответствии с п.2, в котором указанное устройство управления (300) приводит в действие указанный привод (220), когда после начала приведения в действие указанного исполнительного механизма (232) пропадает шум, содержащийся в сигнале, поступившем от указанного детектора (115).
4. Устройство управления двигателем в соответствии с п.3, в котором указанное устройство управления (300) определяет, что указанный шум ослабевает, когда состояние, при котором сигнал, поступающий от указанного детектора (115), не претерпевает изменений, продолжается в течение заранее определенного периода времени после начала приведения в действие указанного исполнительного механизма (232).
5. Устройство управления для двигателя в соответствии с п.1, в котором
указанное устройство управления (300) выдает сигнал для приведения в действие указанного исполнительного механизма (232), и
в указанном стартере (200) указанный привод (220) приводится в действие в ответ на завершение работы указанным исполнительным механизмом (232).
6. Устройство управления двигателем в соответствии с п.1, в котором указанное устройство управления (300) управляет указанным двигателем (100) на основе обновленной величины угла поворота коленчатого вала.
7. Устройство управления двигателем в соответствии с п.1, в котором
указанный коленчатый вал (111) снабжен детекторной пластиной (112), вращающейся вместе с указанным коленчатым валом (111),
указанный детектор (115) генерирует импульсный сигнал путем обнаружения зубца на периферии указанной детекторной пластины (112), и
указанное устройство управления (300) подсчитывает указанный импульсный сигнал, сформированный указанным детектором (115), чтобы обновить величину угла поворота указанного коленчатого вала (111).
8. Устройство запуска двигателя, содержащее:
указанный стартер (200, 200А); и
устройство управления (300) в соответствии с одним из пп. с 1 по 8.
9. Способ управления двигателем, оборудованным стартером (200, 200А), содержащим вторую шестерню (260), которая может быть введена в зацепление с первой шестерней (110), присоединенной к коленчатому валу (111); исполнительный механизм (232), вызывающий в рабочем состоянии перемещение указанной второй шестерни (260) в положение, в котором указанная вторая шестерня (260) вводится в зацепление с указанной первой шестерней (110); и привод (220), приводящий во вращение указанную вторую шестерню (260),
указанный двигатель (100) оборудован детектором (115) для определения вращения указанного коленчатого вала (111),
содержащий шаги:
приведение в действие указанного исполнительного механизма (232);
обновление величины угла поворота указанного коленчатого вала (111) на основе сигнала от указанного детектора (115) после того, как приводится в действие исполнительный механизм (232) и приводится в действие привод (220);
ограничение обновления величины угла поворота на основе сигнала от указанного детектора (115) в течение периода времени от времени, когда приводится в рабочее состояние указанный исполнительный механизм (232), до времени, когда приводится в рабочее состояние указанный привод (220).
10. Транспортное средство, содержащее:
стартер (200, 200А), содержащий вторую шестерню (260), которая может быть введена в зацепление с первой шестерней (110), присоединенной к коленчатому валу (111), исполнительный механизм (232), вызывающий в рабочем состоянии перемещение указанной второй шестерни (260) в положение, в котором указанная вторая шестерня (260) вводится в зацепление с указанной первой шестерней (110), и привод (220), приводящий во вращение указанную вторую шестерню (260);
детектор (115), который определяет вращение указанного коленчатого вала (111); и
устройство управления (300), которое управляет указанным стартером (200, 200А), где
указанное устройство управления (300) обновляет величину угла поворота указанного коленчатого вала (111), определенную указанным устройством управления (300) на основе сигнала, поступающего от указанного детектора (115), после того как приводится в действие исполнительный механизм (232) и приводится в действие привод (220);
указанное устройство управления (300) ограничивает обновление величины угла поворота на основе сигнала от указанного детектора (115) в течение периода времени от времени, когда приводится в рабочее состояние указанный исполнительный механизм (232), до времени, когда приводится в рабочее состояние указанный привод (220).
11. Устройство управления двигателем, оборудованным стартером (200, 200А), содержащим вторую шестерню (260), которая может быть введена в зацепление с первой шестерней (110), присоединенной к коленчатому валу (111); исполнительный механизм (232), вызывающий в рабочем состоянии перемещение указанной второй шестерни (260) в положение, в котором указанная вторая шестерня (260) вводится в зацепление с указанной первой шестерней (110); и привод (220) приводящий во вращение указанную вторую шестерню (260),
где
указанный двигатель (100) оборудован детектором (115) для определения вращения указанного коленчатого вала (111),
указанное устройство управления (300) получает и обновляет величину угла поворота указанного коленчатого вала (111), определенную детектором (115), и
указанное устройство управления (300) ограничивает обновление величины угла поворота в течение периода времени от времени, когда приводится в рабочее состояние указанный исполнительный механизм (232), до времени, когда приводится в рабочее состояние указанный привод (220).
12. Устройство управления двигателем, оборудованным стартером (200, 200А), содержащим вторую шестерню (260), которая может быть введена в зацепление с первой шестерней (110), присоединенной к коленчатому валу (111); исполнительный механизм (232), вызывающий в рабочем состоянии перемещение указанной второй шестерни (260) в положение, в котором указанная вторая шестерня (260) вводится в зацепление с указанной первой шестерней (110); и привод (220), приводящий во вращение указанную вторую шестерню (260),
где
указанный двигатель (100) оборудован детектором (115) для определения вращения указанного коленчатого вала (111),
указанное устройство управления (300) получает и обновляет величину угла поворота указанного коленчатого вала (111), определенную детектором (115),
указанный привод (220) приводится в рабочее состояние после приведения в рабочее состояние исполнительного механизма (232), и
указанное устройство управления (300) ограничивает обновление величины угла поворота коленчатого вала в течение периода времени от времени, когда приводится в рабочее состояние указанный исполнительный механизм (232), до времени, когда завершено зацепление между указанной первой шестерней (110) и указанной второй шестерней (260), и обновляет угол поворота коленчатого вала после завершения зацепления между указанной первой шестерней (110) и указанной второй шестерней (260).
| JP 2010236533 A, 21.10.2010 | |||
| JP 2004232488 A, 19.08.2004 | |||
| JP 2001295680 A, 26.10.2001 | |||
| JP 2012240654 A, 10.12.2012 |

