Область техники, к которой относится изобретение
Настоящее изобретение относится к гибридному транспортному средству, и в частности, к методике информирования водителя о состоянии приведения в действие источников мощности приведения в движение, состоянии рекуперации и т.п.
Уровень техники
Получили широкое практическое применение гибридные транспортные средства, объединяющие в качестве источников мощности приведения в движение транспортного средства двигатель, приводимый в действие от энергии от сгорания топлива, и электродвигатель, приводимый в действие от электроэнергии, и оборудованные автоматической трансмиссией (включающей в себя устройство деления мощности) между источниками мощности приведения в движение и ведущими колесами. В таком гибридном транспортном средстве движение на основе выборочного использования двигателя и электродвигателя, к примеру, в соответствии с режимом движения позволяет понижать расход или выброс топлива при сохранении заданных рабочих характеристик движения. В частности, в транспортном средстве предоставляется множество режимов движения, отличающихся по состоянию приведения в действие двигателя и электродвигателя, например режим движения с включенным двигателем, в котором транспортное средство движется с использованием исключительно двигателя в качестве источника мощности приведения в движение, режим движения с включенным электродвигателем, в котором транспортное средство движется с использованием исключительно электродвигателя в качестве источника мощности приведения в движение (в дальнейшем режим движения с включенным электродвигателем также может упоминаться как EV-режим), режим движения с включенным электродвигателем и двигателем, в котором транспортное средство движется с использованием как двигателя, так и электродвигателя в качестве источников мощности приведения в движение. Они могут автоматически переключаться в соответствии с заранее определенными условиями переключения режима, такими как карта источников мощности приведения в движение, использующая состояния движения, такие как скорость транспортного средства (или скорость вращения источников мощности приведения в движение) и интенсивность при работе педали акселератора, в качестве параметров.
Тем не менее, в таком гибридном транспортном средстве показания только скорости транспортного средства и частоты вращения двигателя, как в традиционном транспортном средстве с приводом от двигателя, использующем исключительно двигатель в качестве источника мощности приведения в движение, предоставляют неполную информацию для получения сведений об активированном состоянии источников мощности приведения в движение или состоянии движения. Например, показание частоты вращения двигателя в ходе режима движения с включенным электродвигателем (которая обычно равна 0) не является полезным. Таким образом, потребности водителя в информации не всегда могут полностью удовлетворяться.
Руководство Harrier Hybrid New Car Model Guide (выпущенное 22 марта 2005 года компанией TOYOTA JIDOSHA KABUSHIKI KAISHA) раскрывает комбинированный измеритель гибридного транспортного средства. Комбинированный измеритель включает в себя круговой прибор измерения мощности, который аналогичен измерителю частоты вращения двигателя (тахометру), который указывает совокупное значение выходной мощности двигателя и выходной мощности электродвигателя. Диапазон показаний измерителя мощности составляет -40~200 кВт, при этом положение (диапазон) указателя измерителя ниже 0 означает возврат энергии.
Тем не менее, прибор измерения мощности, раскрытый в руководстве, показывает просто выходную мощность и состояние рекуперации в качестве гибридной системы. Следовательно, водитель не может узнать, например, как сильно педаль акселератора может быть нажата, когда транспортное средство движется в EV-режиме с остановленным двигателем, прежде чем двигатель начнет функционировать от нее (поскольку невозможно удовлетворять запрос ускорения посредством движения исключительно посредством электродвигателя) (начало функционирования двигателя после активации системы также может упоминаться как "запуск"), и как сильно тормозная педаль может быть нажата, когда транспортное средство движется (в любом режиме), прежде чем произойдет выход из рекуперативного торможения, где энергия может быть восстановлена (поскольку невозможно удовлетворять запрос замедления исключительно посредством рекуперативного торможения или поскольку невозможно накапливать генерируемую мощность в аккумуляторе), и начинает функционировать тормоз механического типа (в дальнейшем также называемый механическим тормозом). Как результат, может иметь место случай, когда двигатель приводится в действие, и эффективность использования топлива ухудшается, или случай, когда механический тормоз приводится в действие и энергия не восстанавливается, посредством чего эффективность использования топлива ухудшается.
Сущность изобретения
Настоящее изобретение выполнено для того, чтобы разрешить вышеописанные проблемы, и его цель состоит в том, чтобы предоставить индикаторное устройство для гибридного транспортного средства, которое реализует простое недопущение активации двигателя или механического тормоза вследствие действия водителя, которое, как следствие, ухудшило бы эффективность использования топлива.
Индикаторное устройство для гибридного транспортного средства согласно настоящему изобретению - это индикаторное устройство для гибридного транспортного средства, использующего, в качестве источников движения транспортного средства, двигатель и вращающуюся электрическую машину, возбуждаемую посредством электроэнергии, подаваемой из механизма накопления энергии. Индикаторное устройство включает в себя: блок вычислений, чтобы вычислять индекс, с которым транспортному средству разрешено двигаться посредством вращающейся электрической машины без активации двигателя; и блок индикации, чтобы указывать индекс, с тем чтобы сообщать водителю об индексе.
Согласно настоящему изобретению гибридному транспортному средству разрешено двигаться, по меньшей мере, с помощью одного из двигателя и вращающейся электрической машины (электродвигателя-генератора или электродвигателя), возбуждаемой посредством электроэнергии, подаваемой из механизма накопления энергии. Поскольку потребляется топливо, когда двигатель активирован, предпочтительно с точки зрения повышения эффективности использования топлива не давать возможность двигателю активироваться. Например, если водитель нажимает на педаль акселератора в ходе движения гибридного транспортного средства с помощью электродвигателя с остановленным двигателем, запрашиваемая мощность становится большой (например, 10 кВт), и запрос ускорения не может быть удовлетворен за счет движения исключительно с помощью электродвигателя. Таким образом, двигатель активируется. Чтобы сообщать водителю о ситуации, индекс, с которым транспортному средству разрешено двигаться с помощью электродвигателя без активации двигателя, вычисляется, и он сообщается водителю. Смотря на сообщаемый индекс, водитель может легко узнавать меру индекса (мощность), с которой транспортному средству разрешено двигаться исключительно с помощью электродвигателя. Таким образом, водитель, который не хочет приводить двигатель в действие, смотрит на индекс и управляет педалью акселератора так, чтобы не приводить двигатель в действие (т.е. не увеличивать чрезмерно запрашиваемую мощность). Это позволяет не допускать активации двигателя. Как результат, становится возможным предоставлять индикаторное устройство для гибридного транспортного средства, которое реализует простое недопущение активации двигателя вследствие действия водителя, которое, как следствие, ухудшило бы эффективность использования топлива.
Предпочтительно блок вычислений вычисляет индекс на основе того, запрашивает ли водитель режим движения, в котором транспортному средству разрешено двигаться без активации двигателя.
Согласно настоящему изобретению в новейших гибридных транспортных средствах водитель может запрашивать режим движения, в котором транспортному средству разрешено двигаться без активации двигателя, с учетом шумов, беспокоящих окрестности при движении через жилые районы рано утром или поздно вечером. Когда такой режим запрошен, индекс, с которым транспортному средству разрешено двигаться посредством вращающейся электрической машины без активации двигателя, может быть вычислен как большее значение, с тем чтобы дополнительно удовлетворять запрос водителя. Таким образом, становится возможным предоставлять индикаторное устройство для гибридного транспортного средства, которое реализует простое недопущение ухудшения эффективности использования топлива, при этом учитывая запрос водителя.
Индикаторное устройство для гибридного транспортного средства согласно другому аспекту настоящего изобретения - это индикаторное устройство для гибридного транспортного средства, использующее в качестве источников движения для транспортного средства двигатель и вращающуюся электрическую машину, возбуждаемую посредством электроэнергии, подаваемой из механизма накопления энергии, причем вращающаяся электрическая машина возбуждается посредством двигателя или ведущих колес, тем самым генерируя электроэнергию, которая, в свою очередь, накапливается в механизме накопления энергии. Индикаторное устройство включает в себя: блок вычислений, чтобы вычислять индекс, с которым транспортному средству разрешено замедляться без приведения в действие механизма механического торможения, предусмотренного в транспортном средстве; и блок индикации, чтобы указывать индекс, с тем, чтобы сообщать водителю об индексе.
Согласно настоящему изобретению гибридному транспортному средству разрешено двигаться, по меньшей мере, с помощью одного из двигателя и вращающейся электрической машины (электродвигателя-генератора, приводимого в действие как электродвигатель), возбуждаемой посредством электроэнергии, подаваемой из механизма накопления энергии, и вращающаяся электрическая машина (электродвигатель-генератор, приводимый в действие как генератор) возбуждается с помощью двигателя или ведущих колес, тем самым генерируя электроэнергию, которая, в свою очередь, накапливается в механизме накопления энергии. Поскольку топливо потребляется, когда генератор приводится в действие с помощью двигателя, чтобы генерировать электроэнергию, с точки зрения повышения эффективности использования топлива, предпочтительно приводить генератор в действие не с помощью двигателя, а с помощью ведущих колес в ходе торможения, чтобы тем самым генерировать электроэнергию. Например, если мощность, которая может быть принята механизмом накопления энергии, является маленькой, или если запрос замедления является большим, когда водитель нажимает на педаль акселератора в ходе движения гибридного транспортного средства, механизм механического торможения (механический тормоз) приводится в действие. Механический тормоз просто преобразует кинетическую энергию транспортного средства в тепловую энергию, и поэтому энергия теряется. Чтобы сообщать водителю о ситуации, индекс, с которым транспортному средству разрешено замедляться без приведения в действие механического тормоза, предусмотренного в транспортном средстве, вычисляется, и он сообщается водителю. Смотря на сообщенный индекс, водитель может легко узнавать меру индекса (мощность), с которой разрешено рекуперативное торможение. Таким образом, водитель, который не хочет приводить двигатель в действие, смотрит на индекс и управляет тормозной педалью так, чтобы не приводить механический тормоз в действие. Это позволяет не допускать приведения в действие механического тормоза. Как результат, становится возможным предоставлять индикаторное устройство для гибридного транспортного средства, которое реализует простое недопущение приведения в действие механического тормоза от действий водителя, которое, как следствие, ухудшило бы эффективность использования топлива.
Предпочтительно механизм накопления энергии - это аккумуляторная батарея, и блок вычислений вычисляет индекс на основе состояния аккумуляторной батареи.
Согласно настоящему изобретению входные/выходные рабочие характеристики электрической мощности аккумуляторной батареи изменяются в зависимости от состояния (SOC (состояния зарядки), температуры и т.п.) аккумуляторной батареи. Когда выходные рабочие характеристики являются плохими, невозможно получать большую энергию для движения исключительно с помощью электродвигателя. Когда входные рабочие характеристики являются плохими, даже когда большая энергия восстанавливается посредством рекуперативного торможения, энергия не может быть принята на большую величину. Следовательно, вычисляя индекс на основе состояния аккумуляторной батареи так, как описано выше, становится возможным сообщать водителю об индексе, который может фактически вводиться или выводиться из аккумуляторной батареи.
Предпочтительно блок вычислений вычисляет индекс на основе температуры аккумуляторной батареи.
Согласно настоящему изобретению входные/выходные рабочие характеристики по электрической мощности аккумуляторной батареи изменяются в зависимости от температуры аккумуляторной батареи. Когда температура низкая, в отличие от случая, где температура является высокой, выходные рабочие характеристики являются плохими, и невозможно получать большую энергию для движения исключительно с помощью электродвигателя, и входные рабочие характеристики являются плохими, и энергия посредством рекуперативного торможения не может быть принята на большую величину. Следовательно, вычисляя индекс на основе температуры аккумуляторной батареи так, как описано выше, становится возможным сообщать водителю об индексе, который может фактически вводиться или выводиться из аккумуляторной батареи.
Предпочтительно блок индикации указывает индекс на приборной панели перед сиденьем водителя.
Согласно настоящему изобретению, поскольку индекс указывается на приборной панели перед сиденьем водителя, водитель может легко узнавать индекс.
Краткое описание чертежей
Фиг.1 - это блок-схема управления всего гибридного транспортного средства, включающего в себя индикаторное устройство согласно настоящему варианту осуществления.
Фиг.2 показывает устройство деления мощности.
Фиг.3-5 являются блок-схемами последовательности операций способа, каждая из которых показывает управляющую структуру программы, выполняемой посредством гибридного ECU на фиг.1.
Фиг.6 показывает многомерную характеристику для вычисления коэффициента поправки на температуру, сохраненную в гибридном ECU на фиг.1.
Фиг.7 показывает пример показания прибора измерения мощности.
Фиг.8 показывает пример показания согласно первому варианту.
Фиг.9 - это блок-схема последовательности операций способа, показывающая управляющую структуру программы, выполняемой посредством гибридного ECU во втором варианте.
Оптимальный режим осуществления изобретения
Далее подробно описываются примерные варианты осуществления настоящего изобретения со ссылками на чертежи. В последующем описании идентичные части обозначаются посредством идентичных номеров ссылки. Их обозначения и функции также являются идентичными. Следовательно, их подробные описания не повторяются.
Ссылаясь на фиг.1, далее описывается блок-схема управления гибридного транспортного средства, включающего в себя индикаторное устройство согласно варианту осуществления настоящего изобретения. Следует отметить, что настоящее изобретение не ограничено гибридным транспортным средством, показанным на фиг.1, поскольку двигатель внутреннего сгорания (в дальнейшем описываемый как двигатель), такой как, например, бензиновый двигатель, выступает в качестве источника приведения (источника движения) для предоставления возможности транспортному средству двигаться и также выступает в качестве источника возбуждения генератора. Дополнительно такое транспортное средство должно быть только транспортным средством, в котором двигатель и электродвигатель-генератор - это источники приведения в движение, и транспортное средство должно допускать движение посредством мощности приведения в движение с помощью электродвигателя-генератора (независимо от того, остановлен или нет двигатель). Транспортное средство может быть гибридным транспортным средством другой формы, т.е. может быть оборудовано аккумулятором для движения, имея EV-режим и допуская осуществление управления рекуперативным торможением (это может быть то, что называют параллельным типом или параллельно-последовательным типом). Аккумулятор - это ионно-литиевый аккумулятор, никель-металлогидридный аккумулятор и т.п. Его тип не ограничен конкретным образом. Конденсатор может заменять аккумулятор. Следует отметить, что температурная характеристика, описанная ниже, отличается в зависимости от типа аккумулятора. Когда используется конденсатор, применяется не SOC, описанный ниже, а другой индекс (заряженная энергия и т.п.).
Гибридное транспортное средство включает в себя двигатель 120 и электродвигатель-генератор (MG) 140. Далее, для простоты пояснения, хотя электродвигатели-генераторы 140 выражаются как электродвигатель-генератор 140A (или MG(2) 140A) и электродвигатель-генератор 140B (или MG(1) 140B), электродвигатель-генератор 140A может выступать в качестве генератора, а электродвигатель-генератор 140B может выступать в качестве электродвигателя, в зависимости от состояния движения гибридного транспортного средства. Когда электродвигатель-генератор выступает в качестве генератора, выполняется рекуперативное торможение. Когда электродвигатель-генератор выступает в качестве генератора, кинетическая энергия транспортного средства преобразуется в электроэнергию, и транспортное средство замедляется.
Гибридное транспортное средство также оборудовано следующими устройствами: механизм 180 редуктора, который передает мощность приведения в движение, генерируемую посредством двигателя 120 и электродвигателя-генератора 140, на ведущие колеса 160 и передает вращение ведущих колес 160 на двигатель 120 и электродвигатель-генератор 140; устройство 200 деления мощности (к примеру, механизм планетарной передачи, который описан ниже), которое распределяет мощность приведения в движение, генерируемую посредством двигателя 120, между двумя путями, т.е. ведущими колесами 160 и электродвигателем-генератором 140B (MG(1) 140B); тяговый аккумулятор 220, который накапливает электроэнергию для возбуждения электродвигателей-генераторов 140; инвертор 240, который управляет током при преобразовании постоянного тока тягового аккумулятора 220 и переменного тока электродвигателя-генератора 140A (MG(2) 140A) и электродвигателя-генератора 140B (MG(1) 140B); модуль 260 управления аккумулятором (далее называемый ECU (электронный модуль управления) аккумулятора), который управляет и контролирует состояние заряда и разряда (к примеру, SOC) тягового аккумулятора 220; ECU 280 двигателя, который управляет состояниями работы двигателя 120; MG_ECU 300, который управляет электродвигателем-генератором 140, ECU 260 аккумулятора, инвертором 240 и т.п. согласно состоянию гибридного транспортного средства; HV_ECU 320, который управляет всей гибридной системой посредством взаимного управления и контроля ECU 260 аккумулятора, ECU 280 двигателя, MG_ECU 300 и т.п. так, чтобы гибридное транспортное средство могло управляться наиболее эффективно; и т.п.
В HV_ECU 320 сигнал запроса EV-режима вводится от EV-переключателя 1200, который является переключателем для предоставления возможности водителю выбирать EV-режим, в котором транспортному средству предоставляется возможность двигаться без приведения в действие двигателя 120.
В ECU 1000 измерителя HV_ECU 320 выводит допустимое значение WOUT мощности движения в EV-режиме для указания мощности на измерителе 1100 мощности, с которой транспортному средству разрешено двигаться в EV-режиме. В ECU 1000 измерителя HV_ECU 320 также выводит допустимое значение WIN мощности рекуперации для указания мощности на измерителе 1100 мощности, допустимой (заряженной) для тягового аккумулятора 220 при рекуперативном торможении. В ECU 1000 измерителя HV_ECU 320 также выводит сигнал инструкции включения лампы, который служит для подсветки на измерителе 1100 мощности лампы, которая показывает то, что мощность рекуперации превысила допустимое значение WIN мощности рекуперации, при этом приведен в действие механический тормоз на основе давления главного тормозного цилиндра. Следовательно, сигнал, указывающий давление главного тормозного цилиндра, вводится в HV_ECU 300 через ECU тормоза.
Такая обработка выполняется посредством программы, выполняемой посредством HV_ECU 320. Следует отметить, что вместо выполнения этой обработки посредством HV_ECU 320 ECU 1000 измерителя может выполнять обработку, которая должна быть выведена на блоке 1100 индикации. Таким образом, то, какой ECU выполняет эту обработку, изобретением не ограничивается. Далее приводится описание при условии, что допустимое значение WOUT мощности движения в EV-режиме и допустимое значение мощности WIN рекуперации, вычисленные посредством HV_ECU 320, указываются на измерителе 1100 мощности через ECU 1000 измерителя.
В настоящем варианте осуществления повышающий преобразователь 242 предоставляется между тяговым аккумулятором 220 и инвертором 240. Поскольку номинальное напряжение тягового аккумулятора 220 ниже, чем номинальное напряжение электродвигателя-генератора 140A (MG(2) 140A) и электродвигателя-генератора 140B (MG(1) 140B), когда электроэнергия подается из тягового аккумулятора 220 в электродвигатель-генератор 140A (MG(2) 140A) и электродвигатель-генератор 140B (MG(1) 140B), повышающий преобразователь 242 повышает уровень электроэнергии.
На фиг.1 каждый ECU структурирован отдельно, но два или более ECU также могут быть сформированы как один интегрированный ECU (примером такого случая может быть MG_ECU 300 и HV_ECU 320, интегрированные как один ECU, как показано посредством пунктирной линии на фиг.1).
Механизм планетарной передачи используется в устройстве 200 деления мощности для того, чтобы разделять мощность приведения в движение от двигателя 120 между ведущими колесами 160 и электродвигателем-генератором 140B (MG(1) 140B). Устройство 200 деления мощности также может выступать в качестве бесступенчатой трансмиссии за счет управления скоростью электродвигателя-генератора 140B (MG(1) 140B). Мощность вращения двигателя 120 подается на водило (C). Оттуда она передается в электродвигатель-генератор 140B (MG(1) 140B) посредством солнечной шестерни (S) и передается в электродвигатель-генератор 140A (MG(2) 140A) и на выходной вал (на стороне с ведущими колесами 160) посредством коронной шестерни (R). Когда вращающийся двигатель 120 должен быть остановлен, он по-прежнему вращается, так кинетическая энергия этого вращения преобразуется в электроэнергию посредством электродвигателя-генератора 140B (MG(1) 140B), тем самым понижая скорость двигателя 120.
В гибридном транспортном средстве, оборудованном гибридной системой, показанной на фиг.1, когда заранее определенное условие для состояния транспортного средства удовлетворено, HV_ECU 320 управляет двигателем 120 через электродвигатель-генератор 140A (MG(2) 140A) и ECU 280 двигателя так, чтобы гибридное транспортное средство двигалось исключительно с помощью электродвигателя-генератора 140A (MG(2) 140A) электродвигателя-генератора 140. Заранее определенное условие - это, например, такое условие, что SOC тягового аккумулятора 220 не меньше заранее определенного значения. Таким образом, когда транспортное средство начинает движение или когда транспортное средство движется на низких скоростях и эффективность двигателя 120 плохая, гибридное транспортное средство может двигаться исключительно с помощью электродвигателя-генератора 140A (MG(2) 140A). Как результат, SOC тягового аккумулятора 220 может быть понижено (затем, когда транспортное средство припаркуется, тяговый аккумулятор 220 может быть заряжен).
В ходе обычного движения мощность приведения в движение из двигателя 120 распределяется между двумя путями посредством устройства 200 деления мощности, например, один из них служит для непосредственного приведения ведущих колес 160, а другой служит для приведения электродвигателя-генератора 140B (MG(1) 140B), чтобы генерировать электроэнергию. Электроэнергия, генерируемая в это время, используется для того, чтобы приводить электродвигатель-генератор 140A (MG(2) 140A), чтобы тем самым помогать в приведении ведущих колес 160. При езде на высоких скоростях тяговый аккумулятор 220 подает электроэнергию в электродвигатель-генератор 140A (MG(2) 140A), чтобы дополнительно увеличивать выходную мощность электродвигателя-генератора 140A (MG(2) 140A), тем самым предоставляя дополнительную движущую силу на ведущие колеса 160. В ходе замедления, с другой стороны, электродвигатель-генератор 140A (MG(2) 140A), который работает после ведущих колес 160, выступает в качестве генератора и восстанавливает электроэнергию. Восстанавливаемая электроэнергия накапливается в тяговом аккумуляторе 220. Когда SOC тягового аккумулятора 220 падает и необходима зарядка, выходная мощность двигателя 120 увеличивается с тем, чтобы увеличивать величину электроэнергии, генерируемой посредством электродвигателя-генератора 140B (MG(1) 140B), тем самым увеличивая SOC ходового аккумулятора 220.
Обычно целевое SOC тягового аккумулятора 220 задается приблизительно в 60% так, чтобы энергия могла регенерироваться независимо от времени регенерации. Верхний и нижний пределы SOC, соответственно, заданы равными 80% и 30%, чтобы не допустить повреждения тягового аккумулятора 220. HV_ECU 320 управляет генерированием, рекуперацией и выходной мощностью электродвигателя посредством электродвигателя-генератора 140 через MG_ECU 300 так, чтобы SOC не превышал верхний или нижний предел. Следует отметить, что значения, показанные в данном документе, являются просто примерами и не ограничены таким конкретным образом.
Ссылаясь на фиг.2, дополнительно описывается устройство 200 деления мощности. Устройство 200 деления мощности сформировано посредством планетарной передачи, включающей в себя солнечную шестерню (S) 202 (в дальнейшем называемую просто солнечная шестерня 202), водило (C) 206 (в дальнейшем называемое просто водило 206) и коронную шестерню (R) 208 (в дальнейшем называемую просто коронная шестерня 208).
Ведущая шестерня 204 зацепляется с солнечной шестерней 202 и коронной шестерней 208. Водило 206 поддерживает ведущую шестерню 204 так, чтобы она могла вращаться на его оси. Солнечная шестерня 202 соединена с валом вращения MG(1) 140B. Водило 206 соединено с коленчатым валом двигателя 120. Коронная шестерня 208 соединена с валом вращения MG(2) 140A и механизмом 180 редуктора.
Поскольку двигатель 120, MG(1) 140B и MG(2) 140A соединены через устройство 200 деления мощности, сформированное посредством планетарной передачи, скорости двигателя 120, MG(1), 140B и MG(2) 140A находятся в зависимости и соединены прямой линией в номограмме, например.
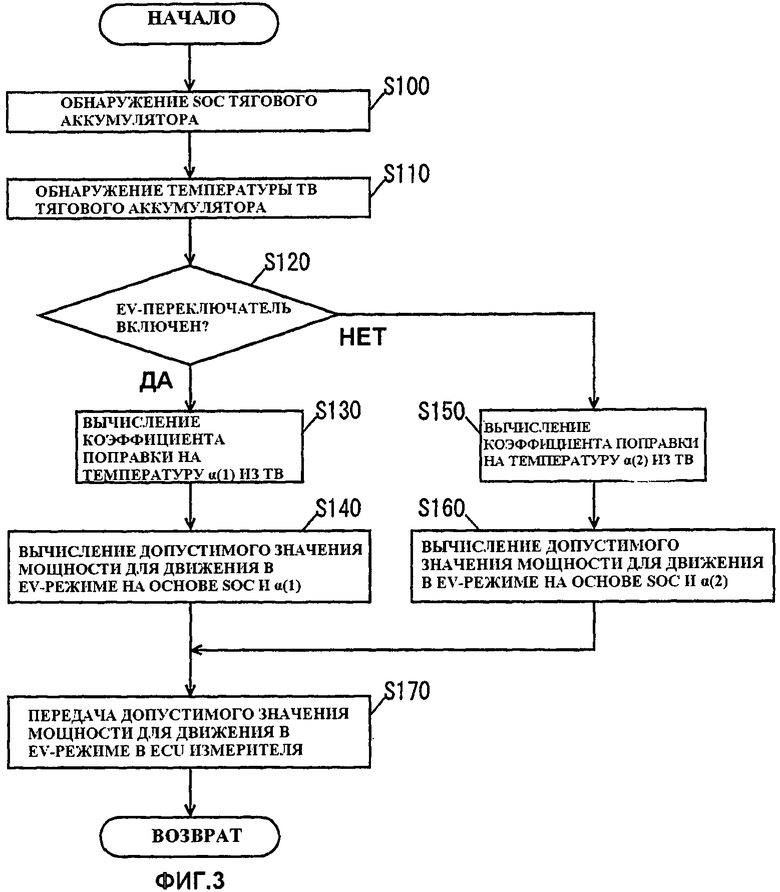
Ссылаясь на фиг.3, описывается структура управления программы, выполняемой посредством HV_ECU 320, управляющего индикаторным устройством согласно настоящему варианту осуществления. Следует отметить, что программа (подпрограмма), показанная посредством блок-схемы последовательности операций способа, выполняется многократно через заранее определенное время цикла (например, 80 мс). Программа служит для вычисления допустимого значения WOUT мощности движения в EV-режиме. Коэффициенты поправки на температуру в описании блок-схемы последовательности операций способа описываются вместе после того, как описаны блок-схемы последовательности операций способа по фиг.3-5.
На этапе (в дальнейшем этап выражается как S) 100 HV_ECU 320 обнаруживает SOC тягового аккумулятора 220 на основе сигнала, введенного из ECU 260 аккумулятора. На S110 HV_ECU 320 обнаруживает температуру TB тягового аккумулятора 220 на основе сигнала, введенного из ECU 260 аккумулятора.
На S120 HV_ECU 320 выполняет определение относительно того, включен или нет EV-переключатель 1200. Когда EV-переключатель 1200 включен (ДА на S120) обработка переходит к S130. Иначе (НЕТ на S120), обработка переходит к S150.
На S130 HV_ECU 320 вычисляет коэффициент поправки на температуру α(1) (для включенного EV-переключателя 1200) на основе температуры TB тягового аккумулятора 220. НА S140 HV_ECU 320 вычисляет допустимое значение WOUT мощности движения в EV-режиме на основе SOC тягового аккумулятора 220 и коэффициент поправки на температуру α(1). Здесь обработка преобразования выполняется для того, чтобы унифицировать единицы SOC и допустимого значения WOUT мощности движения в EV-режиме. После этого обработка переходит к S170.
На S150 HV_ECU 320 вычисляет коэффициент поправки на температуру α(2) (для отключенного EV-переключателя 1200) на основе температуры TB тягового аккумулятора 220. На S160 HV_ECU 320 вычисляет допустимое значение WOUT мощности движения в EV-режиме на основе SOC тягового аккумулятора 220 и коэффициента α(2) поправки на температуру. Обработка преобразования выполняется аналогично тому, как описано выше. После этого обработка переходит к S170.
На S170 HV_ECU 320 передает допустимое значение WOUT мощности движения в EV-режиме в ECU 1000 измерителя.
Затем, ссылаясь на фиг.4, описывается структура управления программы для вычисления допустимого значения WIN мощности рекуперации, выполняемой посредством HV_ECU 320, управляющего индикаторным устройством согласно настоящему варианту осуществления. Следует отметить, что программа (подпрограмма), показанная посредством блок-схемы последовательности операций способа, также выполняется многократно через заранее определенное время цикла (например, 80 мс). В блок-схеме последовательности операций способа по фиг.4 одинаковые номера этапов назначены одинаковым процессам, показанным на фиг.3. Их обработка является такой же. Следовательно, их подробное описание не приводится повторно.
На S200 HV_ECU 320 вычисляет коэффициент поправки на температуру β на основе температуры TB тягового аккумулятора 220. На S210 HV_ECU 320 вычисляет допустимое значение WIN мощности рекуперации на основе SOC тягового аккумулятора 220 и коэффициента поправки на температуру β. Здесь обработка преобразования выполнена, чтобы унифицировать единицы SOC и допустимого значения WIN мощности рекуперации.
На S220 HV_ECU 320 передает допустимое значение WIN мощности рекуперации в ECU 1000 измерителя.
Затем, ссылаясь на фиг.5, описывается структура управления программы для включения лампы срабатывания механического тормоза, выполняемой посредством HV_ECU 320, управляющего индикаторным устройством согласно настоящему варианту осуществления. Следует отметить, что программа (подпрограмма), показанная посредством блок-схемы последовательности операций способа, также выполняется многократно через заранее определенное время цикла (например, 80 мс).
На S300 HV_ECU 320 выполняет определение относительно того, выполняется ли торможение. Здесь HV_ECU 320 выполняет определение на основе сигнала, вводимого из непоказанного тормозного переключателя. Когда водитель нажимает на ножной тормоз (ДА на S300), обработка переходит к S310. Иначе (НЕТ на S300) обработка завершается.
На S310 HV_ECU 320 обнаруживает давление главного тормозного цилиндра на основе сигнала, вводимого через ECU тормоза.
На S320 HV_ECU 320 выполняет определение относительно того, приведен ли механический тормоз в действие. Здесь HV_ECU 320 определяет то, что механический тормоз приведен в действие, если давление главного тормозного цилиндра не меньше заранее определенного порогового значения. Когда механический тормоз приведен в действие (ДА на S320), обработка переходит к S330. Иначе (НЕТ на S320) обработка завершается.
На S330 HV_ECU 320 передает сигнал инструкции включения подсветки для лампы срабатывания механического тормоза в ECU 1000 измерителя.
Ссылаясь на фиг.6, описываются поправочный коэффициент α(1), поправочный коэффициент α(2) и поправочный коэффициент β, которые являются коэффициентами поправки на температуру, используемыми на этапах S130, S150 в блок-схеме последовательности операций способа по фиг.3 и S200 по фиг.4 и 5.
На карте (многомерной зависимости) по фиг.6 горизонтальная ось указывает температуру TB тягового аккумулятора 220, тогда как верхняя часть вертикальной оси указывает поправочный коэффициент α для предоставления поправки на температуру допустимому значению WOUT мощности движения в EV-режиме, а нижняя часть вертикальной оси указывает поправочный коэффициент β для предоставления поправки на температуру допустимому значению WIN мощности рекуперации.
В вертикальной оси абсолютное значение коэффициента возрастает, чем дальше от центра, в обоих верхнем и нижнем направлениях. Таким образом, когда температура TB тягового аккумулятора 220 возрастает, поправка на температуру предоставляется так, чтобы допустимое значение мощности для движения в EV-режиме и допустимое значение WIN мощности рекуперации возрастали.
Кроме того, относительно допустимого значения мощности для движения в EV-режиме поправочный коэффициент α(1) применяется, когда EV-переключатель 1200 включен, тогда как поправочный коэффициент α(2) применяется, когда EV-переключатель 1200 выключен. Абсолютное значение поправочного коэффициента α(1) больше абсолютного значения поправочного коэффициента α(2), с тем чтобы большее допустимое значение WOUT мощности движения в EV-режиме могло быть получено при вычислении, чтобы удовлетворять запрос от водителя, который хочет управлять транспортным средством в EV-режиме.
Ссылаясь на фиг.7, показывающую измеритель 1100 мощности, описывается работа HV_ECU 320, управляющего индикаторным устройством согласно настоящему варианту осуществления, на основе вышеописанной конфигурации и блок-схем последовательности операций способа. Измеритель 1100 мощности, показанный на фиг.7, предусмотрен на приборной панели перед местом водителя.
(1) При движении с помощью электродвигателя при включенном EV-переключателе
Предполагается, что водитель нажал EV-переключатель 1200 и разрешает транспортному средству двигаться с использованием исключительно электродвигателя-генератора 140 в качестве источника движения без приведения в действие двигателя 120.
SOC тягового аккумулятора 220 обнаруживается (S100), и температура TB тягового аккумулятора 220 обнаруживается (S110). Поскольку EV-переключатель 1200 включен (ДА на S120), коэффициент поправки на температуру α(1) с включенным EV-переключателем вычисляется с помощью многомерной характеристики, показанной на фиг.6, и на основе температуры TB тягового аккумулятора 220 (S130).
На основе SOC тягового аккумулятора 220 и коэффициента поправки на температуру α(1) допустимое значение WOUT мощности движения в EV-режиме, показывающее мощность, с которой транспортному средству разрешено двигаться в EV-режиме, вычисляется (S140). Допустимое значение WOUT мощности движения в EV-режиме передается в ECU 1000 измерителя (S170).
ECU 1000 измерителя указывает принимаемое допустимое значение WOUT мощности движения в EV-режиме в секторе 1110 EV-индикации измерителя 1100 мощности, показанного на фиг.7. Здесь допустимое значение WOUT мощности движения в EV-режиме указывается так, чтобы длина (показана посредством A) дуги сектора 1110 EV-индикации возрастала по мере того, как допустимое значение WOUT мощности движения в EV-режиме возрастает, и длина дуги сектора 1110 EV-индикации уменьшалась по мере того, как допустимое значение WOUT мощности движения в EV-режиме уменьшается. Здесь индикация измерителя 1100 мощности, показанного на фиг.7, указывает диапазон CHARGE, когда тяговый аккумулятор 220 заряжен. Он указывает диапазон ECO при движении в энергосберегающем режиме (включая EV-режим). Он указывает диапазон POWER, когда двигатель 120 приведен в действие.
Как описано выше, с помощью сектора 1110 EV-индикации измерителя 1100 мощности, водитель может легко узнавать долю мощности, с которой транспортному средству разрешено двигаться в EV-режиме. Следовательно, водитель, который не хочет начинать приведение в действие (запуск) двигателя 120 в случае, когда EV-переключатель нажат, управляет педалью акселератора так, чтобы указатель не показывал выше сектора 1110 EV-индикации измерителя 1100 мощности. Как результат, может быть повышена эффективность использования топлива.
(2) В ходе движения с помощью электродвигателя при выключенном EV-переключателе
Предполагается, что водитель не нажал EV-переключатель 1200 и разрешает транспортному средству двигаться с использованием исключительно электродвигателя-генератора 140 в качестве источника движения без приведения в действие двигателя 120.
Аналогично вышеописанному (1) SOC тягового аккумулятора 220 обнаруживается (S100), и температура TB тягового аккумулятора 220 обнаруживается (S110). Поскольку EV-переключатель 1200 не включен (НЕТ на S120), коэффициент поправки на температуру α(2) с включенным EV-переключателем вычисляется с помощью многомерной характеристики, показанной на фиг.6, и на основе температуры TB тягового аккумулятора 220 (S150).
На основе SOC тягового аккумулятора 220 и коэффициента поправки на температуру α(2) допустимое значение WOUT мощности движения в EV-режиме, показывающее мощность, с которой движение в EV-режиме допускается, вычисляется (S160). Допустимое значение WOUT мощности движения в EV-режиме передается в ECU 1000 измерителя (S170).
ECU 1000 измерителя указывает принимаемое допустимое значение WOUT мощности движения в EV-режиме в секторе 1110 EV-индикации измерителя 1100 мощности, показанного на фиг.7. Здесь, поскольку допустимое значение WOUT мощности движения в EV-режиме меньше, чем в случае (1), длина дуги сектора 1110 индикации EV-режима меньше.
Как описано выше, с помощью сектора 1110 EV-индикации измерителя 1100 мощности, водитель может легко узнавать долю мощности, с которой транспортному средству разрешено двигаться в EV-режиме. Следовательно, водитель, который не хочет начинать приведение в действие (запуск) двигателя 120 в случае, когда EV-переключатель не нажат, управляет педалью акселератора так, чтобы указатель не показывал выше сектора 1110 EV-индикации измерителя 1100 мощности. Как результат, может быть повышена эффективность использования топлива.
(3) Показание REGEN в ходе замедления
Когда гибридное транспортное средство также движется при или без приведения в действие двигателя 120, SOC тягового аккумулятора 220 обнаруживается (S100), температура TB тягового аккумулятора 220 обнаруживается (S110), и коэффициент поправки на температуру β вычисляется с помощью многомерной характеристики, показанной на фиг.6, и на основе температуры TB тягового аккумулятора 220 (S200).
На основе SOC тягового аккумулятора 220 и коэффициента поправки на температуру β допустимое значение WIN мощности рекуперации, показывающее мощность, с которой тяговый аккумулятор 220 должен заряжаться (допустимую), вычисляется (S210). Допустимое значение WOUT мощности рекуперации передается в ECU 1000 измерителя (S220).
ECU 1000 измерителя указывает принимаемое допустимое значение WOUT мощности рекуперации в секторе 1120 индикации REGEN измерителя 1100 мощности, показанного на фиг.7. Здесь допустимое значение WOUT мощности рекуперации указывается так, чтобы длина (показана посредством B) дуги сектора 1120 индикации REGEN возрастала по мере того, как допустимое значение WOUT мощности рекуперации возрастает, и длина на дуге сектора 1120 индикации REGEN уменьшалась по мере того, как допустимое значение WOUT мощности рекуперации уменьшается.
Как описано выше, с помощью сектора 1120 индикации REGEN измерителя 1100 мощности водитель может легко узнавать долю мощности, с которой разрешено рекуперативное торможение. Следовательно, водитель, которому нужна рекуперация кинетической энергии в ходе замедления так, чтобы достигалось восстановление как электроэнергии, управляет тормозной педалью так, чтобы указатель не показывал выше сектора 1120 индикации REGEN измерителя 1100 мощности. Как результат, энергия может эффективно восстанавливаться.
(4) Показание лампы срабатывания механического тормоза в ходе замедления
Когда водитель нажимает на тормозную педаль, когда гибридное транспортное средство движется (ДА на S300), давление главного тормозного цилиндра обнаруживается (S310). Здесь, когда допустимое значение WIN мощности рекуперации тягового аккумулятора 220 становится равным 0 (или меньше порогового значения), энергия от рекуперативного торможения не может быть накоплена в тяговом аккумуляторе 120, и поэтому механический тормоз приводится в действие.
Когда определяется то, что механический тормоз приведен в действие, на основе давления главного тормозного цилиндра (ДА на S320), сигнал инструкции включения лампы для лампы срабатывания механического тормоза передается в ECU 1000 измерителя.
ECU 1000 измерителя включает лампу 1122 срабатывания механического тормоза измерителя 1100 мощности, показанного на фиг.7, на основе принимаемого сигнала инструкции включения лампы.
Как описано выше, с помощью лампы 1122 срабатывания механического тормоза измерителя 1100 мощности водитель может легко узнавать, что мощность от рекуперативного торможения превысила мощность, которую может принять тяговый аккумулятор 220, и посредством этого механический тормоз приведен в действие. Следовательно, когда лампа 1122 срабатывания механического тормоза измерителя 1100 мощности включается, водитель, который не хочет преобразовывать кинетическую энергию в тепловую энергию посредством механического тормоза в ходе замедления, управляет тормозной педалью так, чтобы отпустить тормозную педаль (в безопасный диапазон). Как результат, можно не допускать потери кинетической энергии.
В вышеописанном способе водитель может легко не допускать приведения в действие двигателя или механического тормоза, что, как следствие, ухудшило бы эффективность использования топлива.
Первый вариант
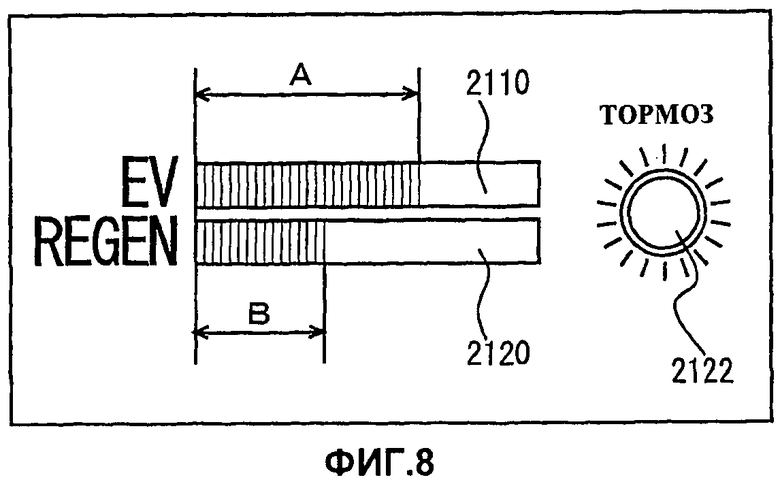
Когда измеритель 1100 мощности не предусмотрен, может использоваться индикаторное устройство, показанное на фиг.8. Индикаторное устройство предусмотрено на приборной панели перед сиденьем водителя.
Как показано на фиг.8, индикаторное устройство включает в себя сектор 2110 EV-индикации, соответствующий сектору 1110 EV-индикации на фиг.7, сектор 2120 индикации REGEN, соответствующий сектору 1120 индикации REGEN на фиг.7, сектор 2110 EV-индикации, соответствующий сектору 1110 EV-индикации на фиг.7, и лампу 2122 срабатывания механического тормоза, соответствующую лампе 1122 срабатывания механического тормоза. Сектор 2110 EV-индикации и сектор 2120 индикации REGEN оба имеют форму столбчатой диаграммы.
Сектор 2110 EV-индикации указывает длину, соответствующую допустимому значению WOUT мощности движения в EV-режиме (показанную посредством A; на фиг.8 соответствует A, показанному на фиг.7). Сектор 2120 индикации REGEN указывает длину, соответствующую допустимому значению WIN мощности рекуперации (показанную посредством B; B на фиг.8 соответствует B, показанному на фиг.7). Следует отметить, что лампа 2122 срабатывания механического тормоза имеет такую же форму, что и лампа 1122 срабатывания механического тормоза.
При этом первом варианте водитель также может легко не допускать приведения в действие двигателя или механического тормоза, что, как следствие, ухудшило бы эффективность использования топлива.
Следует отметить, что может использоваться любой способ показания, отличный от измерителя мощности на фиг.7 и индикаторного устройства на фиг.8.
Второй вариант
В настоящем варианте механическая лампа 1122 приведения в действие и лампа 2122 срабатывания механического тормоза включаются не в ответ на фактическое приведение в действие механического тормоза, а включаются на основе прогноза приведения в действие механического тормоза. Соответственно, в настоящем варианте лампа 1122 срабатывания механического тормоза или лампа 2122 срабатывания механического тормоза выступают в качестве лампы прогноза приведения в действие механического тормоза.
Ссылаясь на фиг.9, описывается структура управления программы для включения лампы срабатывания механического тормоза, выполняемой посредством HV_ECU 320, управляющего индикаторным устройством согласно настоящему варианту. Следует отметить, что программа (подпрограмма), показанная посредством блок-схемы последовательности операций способа, также выполняется многократно через заранее определенное время цикла (например, 80 мс). В блок-схеме последовательности операций способа по фиг.9 одинаковые номера этапов назначены одинаковым процессам, показанным на фиг.3 или фиг.4. Их обработка является такой же. Следовательно, их подробное описание не приводится повторно.
На S400 HV_ECU 320 выполняет определение относительно того, выполняется ли торможение. Здесь HV_ECU 320 выполняет определение на основе сигнала, вводимого из непоказанного тормозного переключателя. Когда водитель нажимает на ножной тормоз (ДА на S400), обработка переходит к S410. Иначе (НЕТ на S400) обработка завершается.
На S410 HV_ECU 320 обнаруживает интенсивность торможения (величину нажатия) B. Здесь HV_ECU 320 обнаруживает интенсивность В торможения на основе сигнала, вводимого из непоказанного датчика обнаружения интенсивности торможения.
На S420 HV_ECU 320 обнаруживает скорость V транспортного средства. Здесь HV_ECU 320 обнаруживает скорость V транспортного средства на основе сигнала, вводимого из непоказанного датчика скорости транспортного средства.
На S430 HV_ECU 320 вычисляет прогнозное значение мощности рекуперации на основе интенсивности B торможения (т.е. запроса замедления) и скорости V транспортного средства. Здесь HV_ECU 320 вычисляет, например, темп замедления из интенсивности торможения, чтобы тем самым вычислять (включая преобразование единиц) значение мощности, генерируемой посредством электродвигателя-генератора 140, при условии, что текущая скорость транспортного средства замедляется в соответствии с темпом замедления. Следует отметить, что способ вычисления прогнозного значения мощности рекуперации не ограничивается этим способом.
На S440 HV_ECU 320 выполняет определение относительно того, больше или нет прогнозное значение мощности рекуперации, чем допустимое значение WIN мощности рекуперации. Здесь предполагается, что единицы прогнозного значения мощности рекуперации и что единицы допустимого значения WIN мощности рекуперации унифицированы. Когда определено то, что прогнозное значение мощности рекуперации больше допустимого значения WIN мощности рекуперации (ДА на S440), обработка переходит к S450. Иначе (НЕТ на S440) обработка завершается.
На S450 HV_ECU 320 передает сигнал инструкции переноса для лампы срабатывания механического тормоза в ECU 1000 измерителя.
Описывается сигнал лампы срабатывания механического тормоза в ходе замедления посредством HV_ECU 320, управляющего индикаторным устройством согласно настоящему варианту, на основе вышеописанной конфигурации и блок-схемы последовательности операций способа.
Когда водитель нажимает на тормозную педаль, когда гибридное транспортное средство движется (ДА на S400), интенсивность B торможения обнаруживается (S410); скорость V транспортного средства обнаруживается (S420); и прогнозное значение мощности рекуперации вычисляется на основе интенсивности B торможения и скорости V транспортного средства (S430).
Когда прогнозное значение мощности рекуперации больше допустимого значения WOUT мощности рекуперации (ДА на S440), это означает, что энергия рекуперации, генерируемая посредством замедления от торможения, только частично может быть накоплена в тяговом аккумуляторе 220. Таким образом, прогнозируется то, что должен быть приведен в действие механический тормоз. Соответственно, сигнал инструкции включения для лампы срабатывания механического тормоза передается в ECU 1000 измерителя.
ECU 1000 измерителя включает лампу 1122 срабатывания механического тормоза измерителя 1100 мощности, показанного на фиг.7, на основе принимаемого сигнала инструкции включения. Здесь лампа 1122 срабатывания механического тормоза дополнительно может мигать, если механический тормоз фактически начинает приводиться в действие. Включение и мигание лампы 1122 срабатывания механического тормоза может осуществляться в обратном порядке. Переключение включения и мигания лампы 1122 срабатывания механического тормоза является преимущественным, поскольку водитель может более точно управлять тормозной педалью.
Как описано выше, с помощью лампы 1122 срабатывания механического тормоза измерителя 1100 мощности водитель может легко узнавать, что мощность от рекуперативного торможения превышает мощность, которую может принять тяговый аккумулятор 220, и механический тормоз приводится в действие.
Следовательно, водитель, который хочет восстанавливать кинетическую энергию в ходе замедления, управляет тормозной педалью так, чтобы отпустит тормозную педаль (в безопасный диапазон), когда лампа 1122 срабатывания механического тормоза измерителя 1100 мощности включается. Как результат, можно не допускать потери кинетической энергии.
В вышеописанном способе водитель может легко не допускать приведения в действие двигателя или механического тормоза, что, как следствие, ухудшило бы эффективность использования топлива.
Следует отметить, что лампа 1122 срабатывания механического тормоза может включаться не на основе обработки на S410-S440 по фиг.9, а на основе допустимого значения WIN мощности рекуперации, вычисленного на S210 по фиг.4 (например, она может включаться, когда допустимое значение WIN мощности рекуперации становится меньше порогового значения).
Другой вариант
В вышеописанных вариантах осуществления допустимое значение WOUT мощности движения в EV-режиме и допустимое значение WIN мощности рекуперации корректируются с помощью коэффициентов поправки на температуру, показанных на фиг.6. С другой стороны, допустимое значение WOUT мощности движения в EV-режиме и допустимое значение WIN мощности рекуперации могут быть вычислены непосредственно из температуры TB тягового аккумулятора 220 без использования поправочных коэффициентов.
Кроме того, допустимое значение WOUT мощности движения в EV-режиме и допустимое значение WIN мощности рекуперации могут корректироваться в соответствии с состоянием приведения в действие вспомогательного оборудования (например, кондиционера), установленного в транспортном средстве.
Следует понимать, что варианты осуществления, раскрытые в данном документе, являются иллюстративными, а не ограничивающими в каком-либо смысле. Область применения настоящего изобретения задается посредством формулы изобретения, а не вышеприведенного описания и имеет намерение включать в себя любые модификации в рамках сущности и объема, эквивалентных формуле изобретения.







Изобретение относится к устройствам для информирования водителя гибридного транспортного средства о состоянии приведения в действие источников мощности. Индикаторное устройство по первому варианту содержит блок вычислений и блок индикации. Блок вычислений определяет индекс, с которым транспортному средству разрешено замедляться без приведения в действие механизма механического торможения. Блок индикации указывает индекс. В индикаторном устройстве по второму варианту содержится средство вычисления и средство индикации. Технический результат заключается в улучшении эффективности использования топлива. 2 н. и 6 з.п. ф-лы, 9 ил.
1. Индикаторное устройство для гибридного транспортного средства, использующее в качестве источников движения для транспортного средства двигатель и вращающуюся электрическую машину, возбуждаемую посредством электроэнергии, подаваемой из механизма накопления энергии, причем упомянутая вращающаяся электрическая машина возбуждается посредством упомянутого двигателя или ведущих колес, тем самым генерируя электроэнергию, которая, в свою очередь, накапливается в упомянутом механизме накопления энергии, содержащее блок вычислений, чтобы вычислять индекс, с которым транспортному средству разрешено замедляться без приведения в действие механизма механического торможения, предусмотренного в транспортном средстве, и блок индикации, чтобы указывать упомянутый индекс с тем, чтобы сообщать водителю об упомянутом индексе.
2. Индикаторное устройство для гибридного транспортного средства по п.1, в котором упомянутый механизм накопления энергии представляет собой аккумуляторную батарею и упомянутый блок вычислений вычисляет упомянутый индекс на основе состояния упомянутой аккумуляторной батареи.
3. Индикаторное устройство для гибридного транспортного средства по п.1, в котором упомянутый блок вычислений вычисляет упомянутый индекс на основе температуры упомянутой аккумуляторной батареи.
4. Индикаторное устройство для гибридного транспортного средства по п.1, в котором упомянутый блок индикации указывает упомянутый индекс на приборной панели перед сиденьем водителя.
5. Индикаторное устройство для гибридного транспортного средства, использующее в качестве источников движения для транспортного средства двигатель и вращающуюся электрическую машину, возбуждаемую посредством электроэнергии, подаваемой из механизма накопления энергии, причем упомянутая вращающаяся электрическая машина возбуждается посредством упомянутого двигателя или ведущих колес, тем самым генерируя электроэнергию, которая, в свою очередь, накапливается в упомянутом механизме накопления энергии, содержащее средство вычисления для вычисления индекса, с которым транспортному средству разрешено замедляться без приведения в действие механизма механического торможения, предусмотренного в транспортном средстве, и средство индикации для указания упомянутого индекса с тем чтобы сообщать водителю об упомянутом индексе.
6. Индикаторное устройство для гибридного транспортного средства по п.5, в котором упомянутый механизм накопления энергии представляет собой аккумуляторную батарею, а упомянутое средство вычисления включает в себя средство для вычисления упомянутого индекса на основе состояния упомянутой аккумуляторной батареи.
7. Индикаторное устройство для гибридного транспортного средства по п.5, в котором упомянутое средство вычисления включает в себя средство для вычисления упомянутого индекса на основе температуры упомянутой аккумуляторной батареи.
8. Индикаторное устройство для гибридного транспортного средства по п.5, в котором упомянутое средство индикации включает в себя средство для указания упомянутого индекса на приборной панели перед сиденьем водителя.
| DE 19533829 C1, 19.09.1996 | |||
| JP 2006233760 A, 07.09.2006 | |||
| JP 9168202 A, 24.06.1997 | |||
| СПОСОБ РАБОТЫ КОМБИНИРОВАННОГО ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 1998 |
|
RU2223183C2 |

