Изобретение относится к области сельскохозяйственного машиностроения, в частности к почвообрабатывающим орудиям - пропашным культиваторам.
Известна секция пропашного культиватора, содержащая параллелограммный механизм, шарнирно соединенный с рамой и рабочими органами (Сельскохозяйственная техника (каталог). М.: ЦНИИТЭИ, 1975, Культиватор-растениепитатель навесной КРН-5,6, стр.222-223).
Основными недостатками данной секции являются большое тяговое сопротивление, передаваемое на раму при выглублении контактирующего с камнем рабочего органа из почвы, невозможность копирования поперечного рельефа поля и плохая очистка стоек рабочих органов от сорняков.
Наиболее близким к предлагаемому изобретению техническим решением является механизм подвески рабочего органа, выполненный в виде параллелограмма, у которого верхняя горизонтальная сторона жестко закреплена на раме, а к нижней горизонтальной стороне крепится рабочий орган (прототип - RU 51815 U1, опубликовано 10.03.2006, 3 стр.).
Основными недостатками данного механизма подвески рабочего органа являются невозможность копирования поперечного рельефа поля, что может привести к повреждению культурных растений при подкормке, и плохая очистка стойки рабочего органа от сорняков.
Задачей настоящего изобретения является повышение качества обработки почвы путем обеспечения возможности копирования поперечного рельефа обрабатываемого поля и снижения забиваемости центрального рабочего органа.
Поставленная задача достигается за счет того, что в механизме подвески рабочих органов, выполненном в виде параллелограмма, у которого верхняя горизонтальная сторона (кронштейн) жестко закреплена на раме, а к нижней горизонтальной стороне (грядилю) крепится рабочий орган, передняя часть грядиля опирается на два колеса, симметрично смещенных в поперечном направлении относительно продольной оси механизма подвески, и посредством подшипника размещена в держателе, который шарнирно связан с передней наклонной тягой подвески, а две задние тяги выполнены в виде подпружиненных штанг с головками, также симметрично смещенных в поперечном направлении относительно продольной оси механизма подвески и шарнирно связанных с поперечными консолями, закрепленными на грядиле, при этом к задней части кронштейна шарнирно присоединены упоры, образующие группы Ассура третьего вида с задними наклонными тягами подвески. Кроме того, на оси колес может быть закреплен дисковый нож, центр которого лежит на продольной оси m-m механизма подвески рабочих органов, плоскость расположена под углом γ=5…7° к вертикальной плоскости, проходящей через продольную ось m-m механизма подвески рабочих органов, а диаметр на 15…20 мм больше диаметра колес.
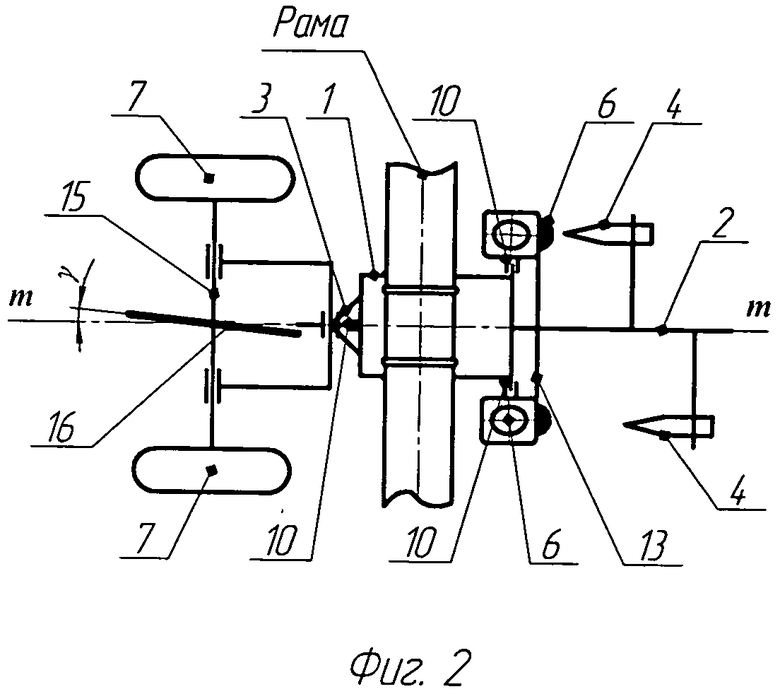
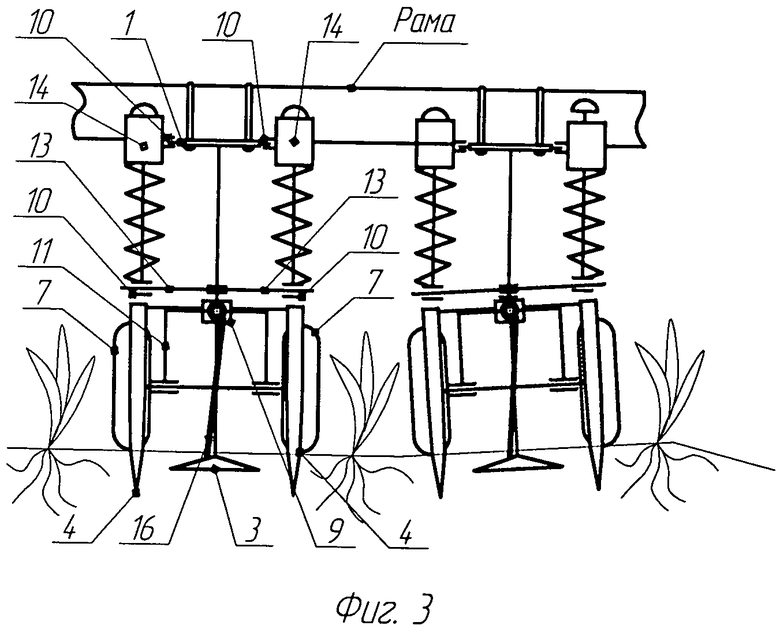
Предлагаемое техническое решение поясняется чертежами. На фиг.1 изображена схема механизма подвески рабочих органов - вид сбоку; на фиг.2 - схема механизма подвески рабочих органов (вид сверху), на фиг.3 - схема работы узлов механизма подвески при копировании рабочими органами поперечного рельефа поля.
Механизм подвески рабочих органов, выполнен в виде шарнирного параллелограмма (фиг.1), образованного верхней горизонтальной стороной - кронштейном 1, который жестко закреплен на раме культиватора, нижней горизонтальной стороной (грядилем) 2, к которому крепятся рабочие органы 3 и 4, передней наклонной тягой 5 и двумя задними наклонными тягами 6. При этом передняя часть грядиля 2 опирается на два колеса 7, симметрично смещенных в поперечном направлении относительно продольной оси m-m (фиг.2) механизма подвески рабочих органов, и посредством подшипников 8 (фиг.1) размещена в держателе 9, который шарниром 10 связан с передней наклонной тягой 5. Причем стойки 11 колес 7 связаны с грядилем 2 механизмом 12 регулировки глубины хода. Задние наклонные тяги 6 выполнены в виде подпружиненных штанг с головками, также симметрично смещенных в поперечном направлении относительно продольной оси m-m (фиг.2) механизма подвески рабочих органов и шарнирно связанных с поперечными консолями 13, закрепленными на грядиле 2, при этом к задней части кронштейна 1 посредством шарниров 10 присоединены упоры 14 (фиг.3), образующие с задними наклонными тягами 6 группы Ассура третьего вида. Кроме того, на оси 15 (фиг.2) колес 7 может быть закреплен дисковый нож 16, центр которого лежит на продольной оси m-m механизма подвески рабочих органов, плоскость расположена под углом γ=5…7° к вертикальной плоскости, проходящей через продольную ось m-m механизма подвески рабочих органов, а диаметр на 15…20 мм больше диаметра колес.
Предлагаемый механизм подвески рабочих органов работает следующим образом.
При движении культиватора по полю колеса 7 перекатываются по его поверхности, копируя рельеф и обеспечивая заданную глубину хода рабочих органов 3 и 4, которая устанавливается механизмом 12 регулировки глубины хода. При перемещении колес 7 вверх относительно рамы культиватора усилия передаются на параллелограммный механизм, при этом передняя наклонная тяга 5 и задние наклонные тяги 6 отклоняются на некоторый угол назад, а грядиль 2 перемещается вверх и назад параллельно первоначальному положению. За счет этого лезвия или долота рабочих органов 3 и 4, закрепленных на грядиле 2, также перемещаются вверх и назад параллельно своему первоначальному положению, что исключает их вращение в продольно-вертикальной плоскости и обеспечивает копирование рельефа без изменения угла вхождения рабочих органов 3 и 4 в почву, обуславливая ее качественную обработку. При перемещении колес 7 вниз, относительно рамы, рабочие органы 3 и 4 вместе с грядилем 2 перемещаются вниз и вперед, под воздействием собственного веса и вертикального давления почвы, также сохраняя параллельность своему первоначальному положению. Одновременно с этим колеса 7 обеспечивают копирование неровностей почвы в поперечном направлении, при этом они проворачивают грядиль 2 с рабочими органами 3 и 4 относительно держателя 8, сжимая одну из пружин задних наклонных тяг 6, между консолью 13 и упором 14. После прохождения неровного участка поля сжатая пружина задней наклонной тяги 6 возвращается в исходное положение, перемещая также грядиль 2 с рабочими органами 3 и 4. Такая конструкция механизма подвески рабочих органов пропашного культиватора позволяет обеспечивать копирование рельефа не только в продольном, но и в поперечном направлении относительно движения агрегата, при этом снижается повреждаемость корней культурных растений рабочими органами 4 и повышается равномерность глубины заделки удобрений. Кроме того, за счет более мягкой пружинной подвески уменьшается сопротивление движению рабочих органов в почве, возрастает вероятность самоочистки стоек рабочих органов от растительного сора.
Причем предлагаемая схема механизма подвески рабочих органов позволяет конструктивно просто установить перед центральным рабочим органом 3 дисковый нож 16. Во время движения агрегата по полю дисковый нож 16 вращается за счет сцепления с почвой, при этом угол его установки γ=5…7° достаточно велик, чтобы обеспечить резание растений на полосе, ширина которой больше ширины стойки рабочего органа, и достаточно мал, чтобы предотвратить сгруживание почвы перед дисковым ножом 16 и ее фонтанирование при высоких рабочих скоростях. Заданный диаметр дискового ножа 16 позволяет перерезать стебли сорных растений даже с учетом их вдавливания в верхний слой почвы, при этом кромка самого дискового ножа 16 погружается в почву на величину не более 1,0 см (без учета проседания колес 7), что снижает удельное сопротивление движению ножа в почве и также предотвращает ее фонтанирование при высоких рабочих скоростях. Одновременно с относительным вращательным движением дисковый нож 16 совершает циклические колебания, за счет чего облегчается разрезание почвы и стеблей растений, снижается вероятность налипания на него почвы. Перерезанные стебли после подрезания корней не удерживаются на стойке рабочего органа 3, что значительно снижает его забиваемость, кроме того, колебания задней части дискового ножа 16 позволяют удалять со стойки рабочего органа 3 оставшуюся часть растительного сора.
| название | год | авторы | номер документа |
|---|---|---|---|
| КУЛЬТИВАТОР | 1992 |
|
RU2015627C1 |
| Пропашной культиватор | 1989 |
|
SU1690562A1 |
| КУЛЬТИВАТОР ДЛЯ УХОДА ЗА РАСТЕНИЯМИ КАРТОФЕЛЯ | 2011 |
|
RU2473196C2 |
| Устройство для регулирования глубины хода рабочих органов сельскохозяйственных машин | 1990 |
|
SU1727590A1 |
| СЕКЦИЯ СЕЯЛКИ-КУЛЬТИВАТОРА | 2020 |
|
RU2762876C1 |
| УНИВЕРСАЛЬНЫЙ ПРИЦЕПНОЙ КУЛЬТИВАТОР | 2009 |
|
RU2410856C1 |
| СЕКЦИЯ КУЛЬТИВАТОРА | 2016 |
|
RU2631388C1 |
| КУЛЬТИВАТОР | 1998 |
|
RU2141182C1 |
| РАБОЧИЙ ОРГАН ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ | 1998 |
|
RU2153788C2 |
| СЕКЦИЯ ПРОПАШНОГО КУЛЬТИВАТОРА | 2007 |
|
RU2340136C1 |
Механизм подвески выполнен в виде параллелограмма, верхняя горизонтальная сторона (кронштейн) которого жестко закреплена на раме. К нижней горизонтальной стороне (грядилю) параллелограмма крепится рабочий орган. Передняя часть грядиля опирается на два колеса, симметрично смещенных в поперечном направлении относительно продольной оси механизма подвески, и посредством подшипника размещена в держателе. Держатель шарнирно связан с передней наклонной тягой подвески. Две задние тяги выполнены в виде подпружиненных штанг с головками, симметрично смещенных в поперечном направлении относительно продольной оси механизма подвески, и шарнирно связаны с поперечными консолями. Консоли закреплены на грядиле. К задней части кронштейна шарнирно присоединены упоры, образующие с задними наклонными тягами подвески группы Ассура третьего класса. Такое конструктивное выполнение позволит повысить качество обработки почвы путем обеспечения возможности копирования поперечного рельефа обрабатываемого поля и снизить забиваемость центрального рабочего органа. 1 з.п. ф-лы, 3 ил.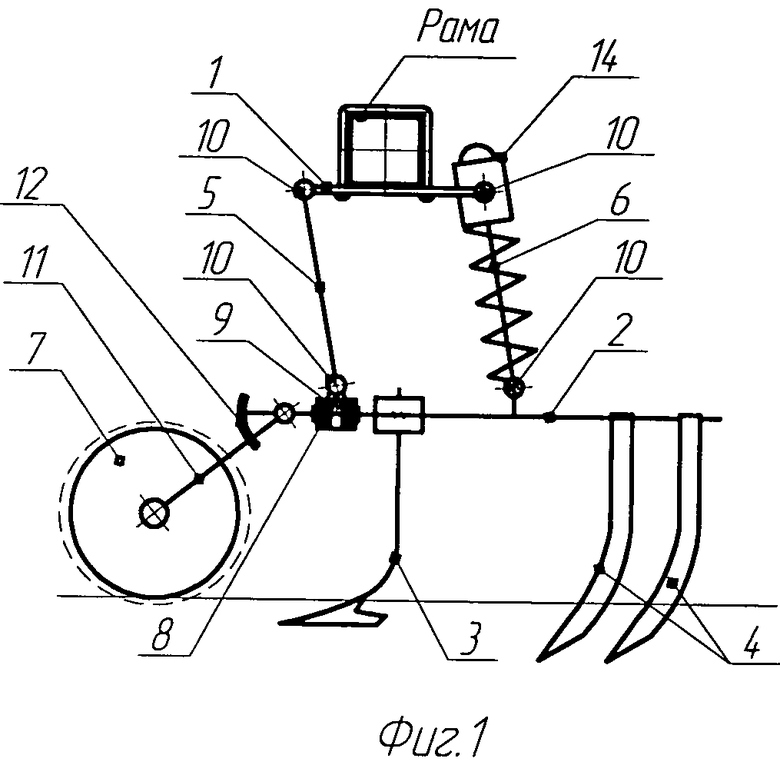
1. Механизм подвески рабочих органов, выполненный в виде параллелограмма, у которого верхняя горизонтальная сторона (кронштейн) жестко закреплена на раме, а к нижней горизонтальной стороне (грядилю) крепится рабочий орган, отличающийся тем, что передняя часть грядиля опирается на два колеса, симметрично смещенных в поперечном направлении относительно продольной оси механизма подвески, и посредством подшипника размещена в держателе, который шарнирно связан с передней наклонной тягой подвески, а две задние тяги выполнены в виде подпружиненных штанг с головками, также симметрично смещенных в поперечном направлении относительно продольной оси механизма подвески и шарнирно связанных с поперечными консолями, закрепленными на грядиле, при этом к задней части кронштейна шарнирно присоединены упоры, образующие с задними наклонными тягами подвески группы Ассура третьего класса.
2. Механизм подвески рабочих органов по п.1, отличающийся тем, что на оси колес закреплен дисковый нож, центр которого лежит на продольной оси механизма подвески рабочих органов, плоскость расположена под углом γ=5…7° к вертикальной плоскости, проходящей через продольную ось механизма подвески рабочих органов, а диаметр на 15…20 мм больше диаметра колес.
| Приспособление для установки и автоматического перемещения печатной ленты к машине для клеймения деталей заготовки обуви | 1955 |
|
SU104415A1 |
| Способ получения чугуна, железа и стали | 1936 |
|
SU51815A1 |
| Узел вертикальной податливости крепи шахтного ствола | 1984 |
|
SU1249161A1 |
| Механический способ извлечения сахара из сырья | 1948 |
|
SU72111A1 |
| Корнеподрезчик | 1989 |
|
SU1605977A1 |

