Область техники, к которой относится изобретение
Настоящее изобретение в основном относится к приводу клапана. Более конкретно, оно относится к приводу клапана, предназначенному для приведения в действие клапана, такого как, например, топливный клапан, в частности, который соединяют с электронным управляющим блоком и/или с другим приводом клапана.
Уровень техники
Приводы клапана находят широкое применение и больше всего используются в обычных системах дозаправки, расположенных на борту воздушных судов.
В основном все приводы клапана имеют процессорное управление настройкой, мониторингом и управлением клапаном. Ключевые факторы управления включают в себя положение привода, т.е. положение клапана, и момент силы привода (прежде всего для поворотных выходных приводов) и осевая сила тяги (прежде всего для линейных выходных приводов). В поворотном выходном приводе, например, положение клапана обычно определяют путем подсчета оборотов или части оборота поворотного выходного вала с помощью углового кодера. В таком приводе нагрузку на выходном валу привода обычно определяют с помощью механического средства, такого как тензометр или датчик давления. Нагрузка также может быть определена по моменту силы, связанного с током в двигателе.
Приводы клапана, как правило, имеют возможность бесперебойной работы, если, например, имеет место сбой в электропитании. С этой целью большинство приводов дополнительно содержат механизм возврата нажимной пружины, чтобы перевести привод в положение бесперебойной работы.
Тем не менее, этот тип приводов клапана имеет недостаток, заключающийся в том, что в случае избыточного давления возможен гидравлический удар.
Более того, в системах дозаправки воздушных судов эти приводы клапана допускают только общее регулирование, как описано в документе US 2008/0173762. В этом документе описывается система дозаправки воздушных судов, позволяющая увеличить скорость дозаправки, в которой в трубопровод дозаправки воздушного судна устанавливают ограничители топливного потока, ограничивающие скорость потока топлива из трубопровода дозаправки в топливные баки. Также известны топливные клапаны, позволяющие отсоединять каждый топливный бак от трубопровода дозаправки.
Общее регулирование осуществляют посредством регулятора давления топлива на борту воздушного судна, так чтобы определить максимальное давление в трубопроводе дозаправки. Этот тип общего регулирования не подходит, когда имеется потребность дозаправить отдельный топливный бак. Бортовой топливный контур воздушного судна, таким образом, не всегда может быть оптимизирован в соответствии с конкретными нуждами.
Поэтому, существует потребность в приводах клапана, предотвращающих гидравлический удар при возникновении избыточного давления и, в частности, допускающих новый способ дозаправки соответствующих топливных баков воздушного судна.
Сущность изобретения
В вариантах осуществления настоящего изобретения предложен привод клапана, включающий в себя:
- корпус,
- двигатель, присоединенный к клапану, при этом вращение двигателя изменяет положение клапана от первого положения, в котором поток жидкости может возникнуть, по меньшей мере, вдоль одного пути, и второго положения, в котором поток жидкости либо блокируют, либо поток может возникнуть, по меньшей мере, вдоль одного второго пути, упомянутый двигатель обычно запитан электроэнергией от основного источника электропитания,
- по меньшей мере, один датчик, предназначенный для определения положение клапана и/или скорость клапана,
- переключатель, управляющий доставкой электроэнергии двигателю,
- схему электроснабжения, подключенную к переключателю; и отличающийся тем, что он дополнительно включает в себя контроллер, подключенный, по меньшей мере, к одному датчику и схеме электроснабжения, упомянутый контроллер в реальном времени собирает данные, относящиеся к положению и/или скорости клапана, и данные, относящиеся к режиму энергоснабжения, вычисляет коррекцию положения и/или скорости пропорционально рассогласованию между собранными данными, относящимися к положению и/или скорости клапана, и собранными данными, относящимися к режиму энергоснабжения, и отправляет новые настройки электроснабжения в схему электроснабжения, причем схема электроснабжения усиливает сигнал контроллера.
Клапан представляет собой шаровой клапан, содержащий блок редуктора, соединяющий двигатель с клапаном. Упомянутый двигатель представляет собой бесщеточный двигатель.
Соответственно, настройки электроснабжения, переданные контроллером в схему электроснабжения, являются функцией, по меньшей мере, одного параметра.
В соответствии с отдельным вариантом настройки электроснабжения, переданные контроллером в схему электроснабжения, являются функцией времени.
Более того, настройки электроснабжения, переданные контроллером в схему электроснабжения, предпочтительно сохраняют в энергонезависимой памяти.
Соответственно, настройки электроснабжения являются функцией времени согласно следующему равенству:
настройки электроснабжения = at3-bt2+ct,
где a, b и с - константы, a t- время, выраженное в секундах.
Более того, привод клапана дополнительно содержит средство определения отказа двигателя.
В соответствии с отдельным вариантом контроллер дополнительно содержит средство, предназначенное для соединения упомянутого контроллера с электронным управляющим блоком (ECU), приспособленным к соединению с множеством приводов клапана.
В соответствии с другим вариантом контроллер дополнительно содержит средство, предназначенное для соединения упомянутого контроллера, по меньшей мере, с одним другим приводом клапана.
Более того, двигатель содержит датчик Холла для определения положения и/или вращения упомянутого двигателя.
Упомянутый блок редуктора, соединяющий двигатель с клапаном, включает в себя червячную передачу.
Как вариант, блок редуктора дополнительно включает в себя ручку, которой придана такая форма, чтобы ее можно было повернуть вручную либо путем захвата, либо с использованием инструмента, и блок редуктора дополнительно включает в себя муфту в сборе, соединяющую ручку со штоком клапана и с редуктором.
В соответствии с другим вариантом контроллер включает в себя средство для вычисления корректировки положения и/или скорости пропорционально рассогласованию между собранными данными, относящимися к положению и/или скорости клапана, и собранными данными, относящимися к режиму энергоснабжения.
Предпочтительно, чтобы привод клапана дополнительно содержал средство, приспособленное для обнаружения сбоев в приводе клапана, таких как сбой контроллера, ошибочное положения клапана или, например, перегрузка по току.
Более того, при обнаружении сбоя в приводе клапана открытие и/или закрытие заслонки клапана осуществляют с постоянной скоростью.
Другие признаки и преимущества изобретения станут очевидны специалистам в области техники из последующего описания, данного в виде неограничивающего примера со ссылкой на прилагаемые чертежи.
Краткое описание чертежей
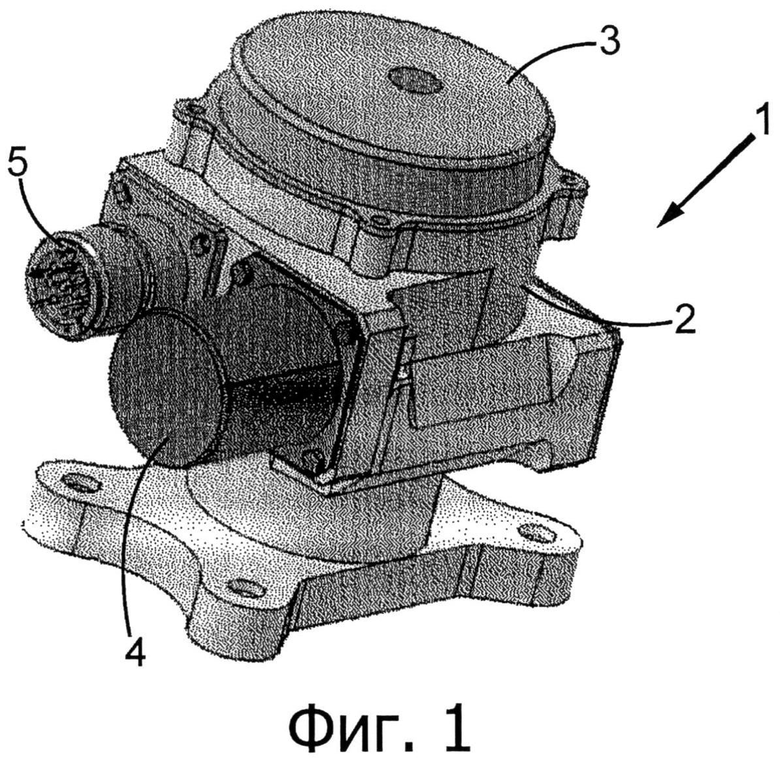
На фиг.1 показан вид в перспективе привода клапана в соответствии с настоящим изобретением.
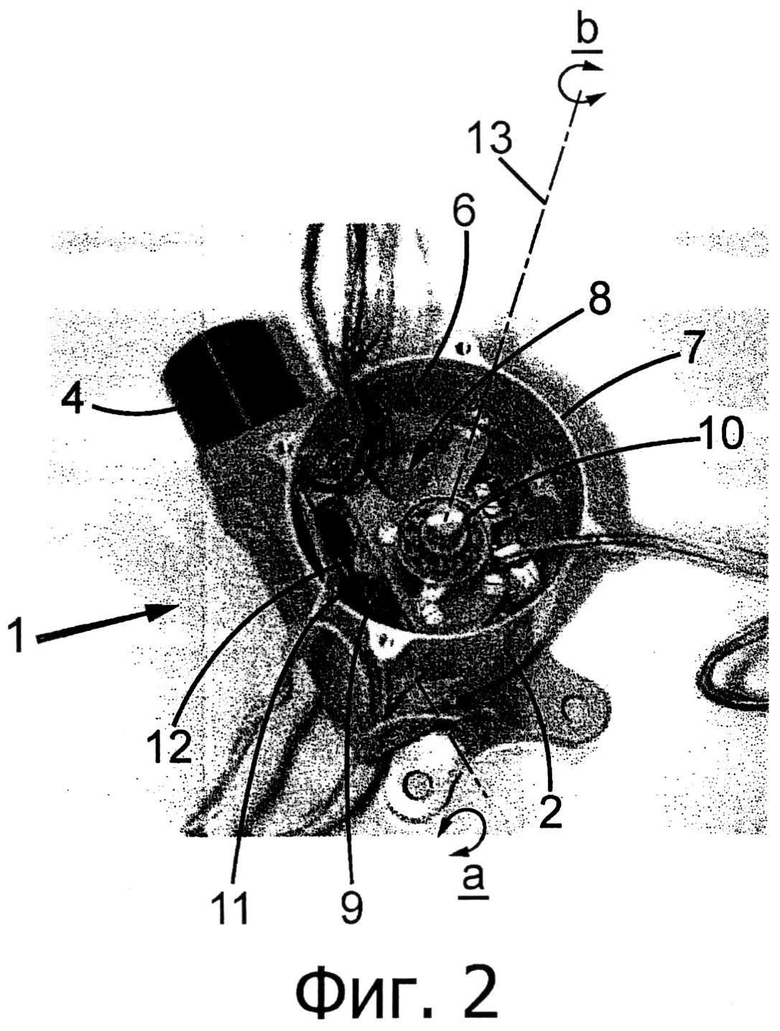
На фиг.2 показан вид в перспективе изнутри привода клапана в соответствии с изобретением.
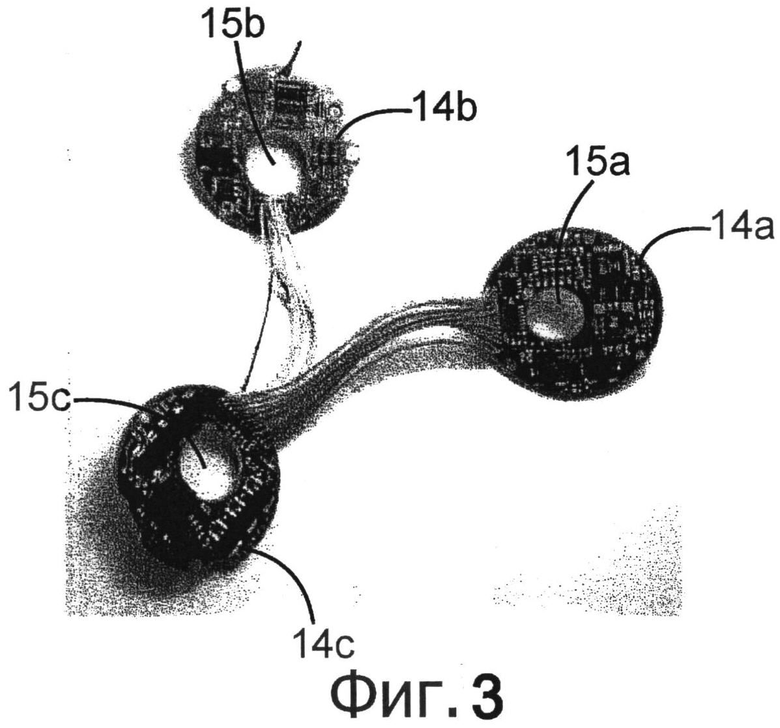
На фиг.3 показаны различные части схемы привода клапана в соответствии с изобретением.
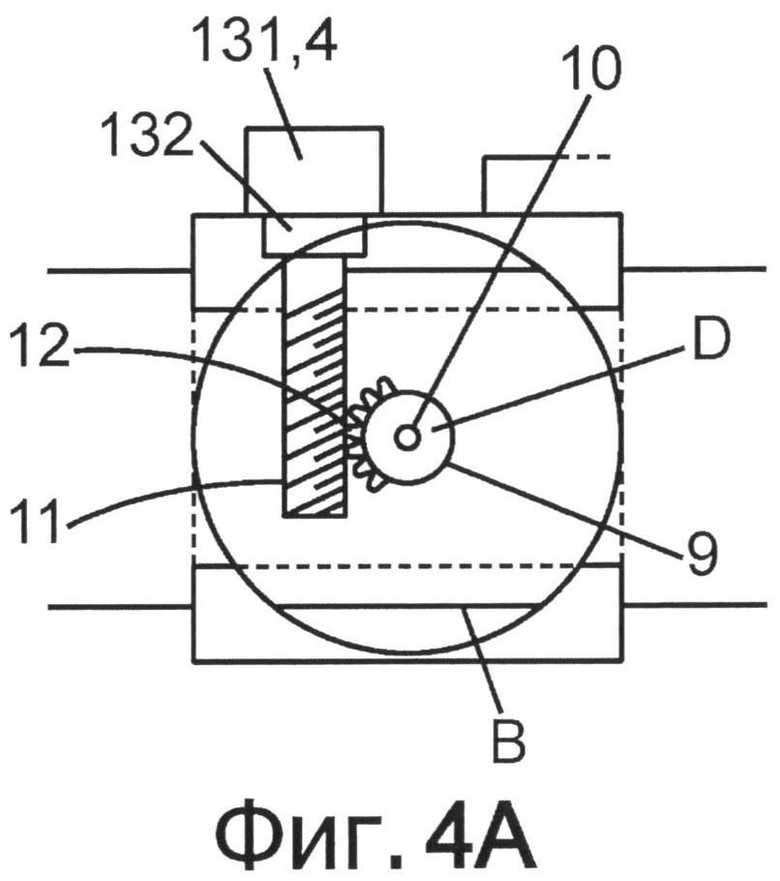
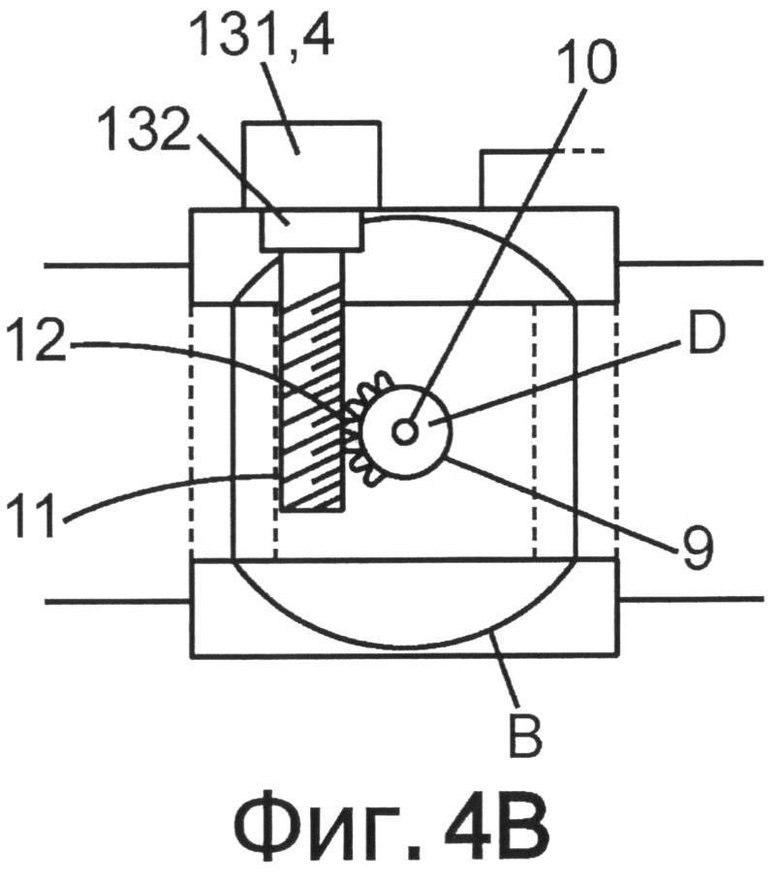
На фиг.4А и 4В показаны соответствующие схематичные виды шарового клапана, управляемого приводом клапана в соответствии с изобретением, в закрытом и открытом положении соответственно.
На фиг.5 показана блок-схема процесса, осуществляемого приводом клапана в соответствии с изобретением.
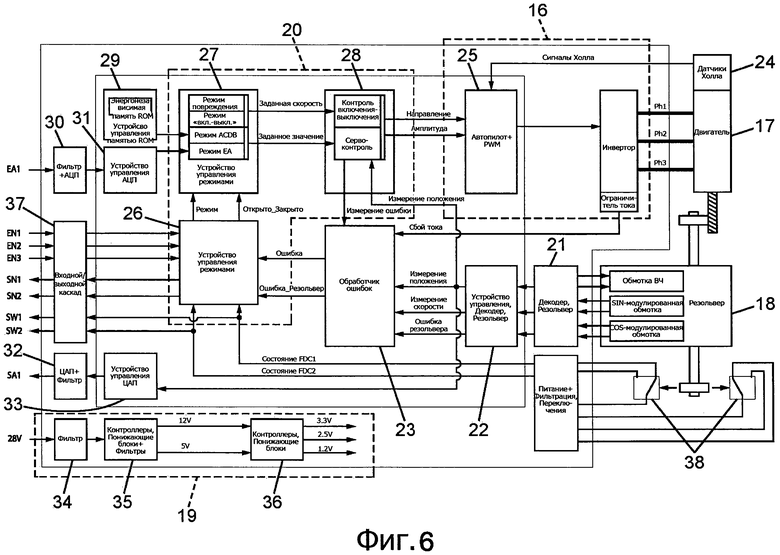
На фиг.6 показана схема электроники привода клапана.
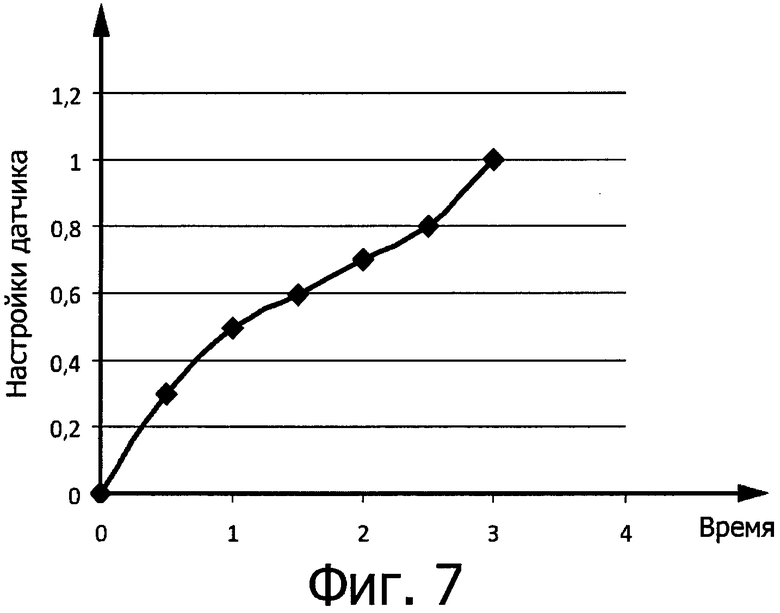
На фиг.7 приведен график настроек электроснабжения, переданных контроллером в схему электроснабжения, как функции времени.
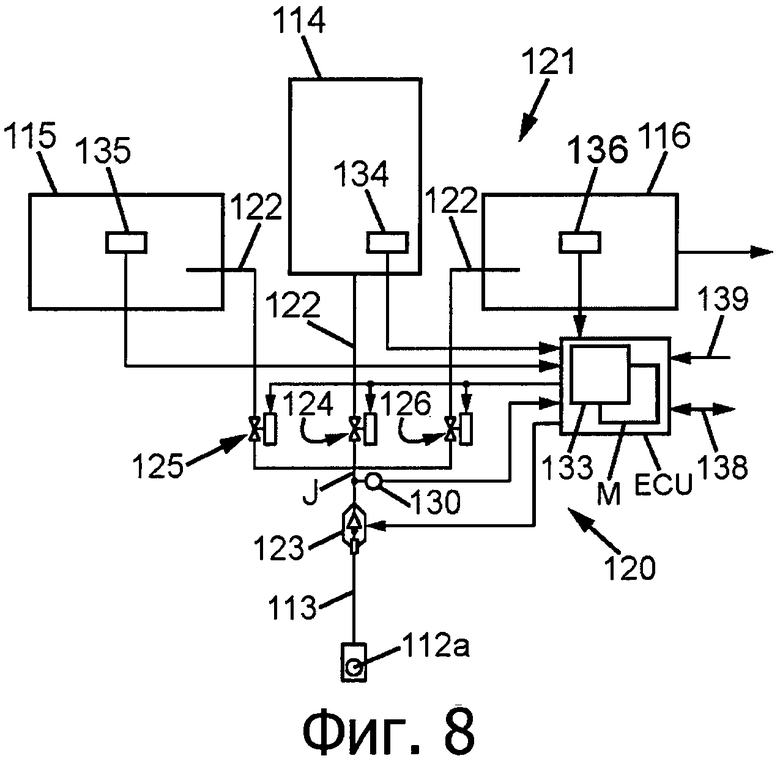
На фиг.8 схематически показано оборудование дозаправки воздушного судна, включающее в себя приводы клапана в соответствии с изобретением.
Подробное описание варианта осуществления
На различных чертежах одинаковые ссылочные позиции используются для обозначения одних и тех же элементов.
На фиг.1 показан вид в перспективе привода 1 клапана в соответствии с настоящим изобретением. Как показано на фиг.1, привод 1 клапана включает в себя цилиндрический корпус 2, закрытый крышкой 3, и содержащий электрический двигатель 4, такой как бесщеточный двигатель, и заглушку 5. Двигатель 4 присоединен к клапану (не показан) таким образом, что вращение двигателя изменяет положение клапана от первого положения, в котором поток жидкости может протекать, по меньшей мере, вдоль одного пути, и второго положения, в котором поток жидкости либо блокируют, либо он может протекать, по меньшей мере, вдоль одного второго пути, упомянутый двигатель обычно запитан электроэнергией от основного источника электропитания (не показан).
Клапан предпочтительно представляет собой шаровой клапан. Упомянутый шаровой клапан представляет собой клапан со сферическим диском - часть клапана, которая управляет проходящим через него потоком. В сфере имеется отверстие, или канал, проходящий через середину, так что, когда канал находится на одной линии с обоими концами клапана, поток может протекать. Когда клапан закрыт, отверстие расположено перпендикулярно концам клапана, а поток заблокирован. Клапан может представлять собой клапан с полным каналом, более известный полнопроходной шаровой клапан, имеющий увеличенный размер шара, так что отверстие в шаре имеет тот же размер, что и трубопровод, что приводит к уменьшению потерь на трение, по сравнению с клапаном с уменьшенным каналом, более известным неполнопроходным сферическим клапаном, в котором поток через клапан на один номинальный диаметр меньше, чем номинальный диаметр клапана, что приводит к тому, что поперечное сечение потока становится меньше, чем сечение трубы, V-образный шаровой клапан, имеющий либо v-образный шар, либо v-образное седло, или цапфовый шаровой клапан, у которого имеется механическое средство закрепления шара сверху и снизу. Более того, он может быть многоканальным шаровым клапаном, таким как трехлинейные шаровые клапаны, имеющие L- или Т-образное отверстие, проходящее через середину, четырехлинейные шаровые клапаны и т.д.
Несмотря на то, что шаровые клапаны широко известны, благодаря их долговечности, необходимо отметить, что шаровой клапан может быть заменен на клапан любого известного типа, такой как запорный клапан, сферический регулирующий клапан, шиберная заслонка, игольчатый клапан, поршневой клапан, пережимной клапан, пробковый клапан, золотниковый клапан и т.д., не выходя за объем изобретения.
На фиг.2 показан корпус 2 с камерой 6 и краем 7, на который опирается крышка 3. Редуктор 8 расположен в камере 6 и включает в себя червячное колесо 9, которое соединено с валом 10 для приведения клапана в действие. Редуктор 8 включает в себя червяк 11, соединенный с двигателем 4 и зубчатый венец 12 червячного колеса 9.
Как вариант, он дополнительно включает в себя блок редуктора, соединяющий двигатель с червяком, ручку, которой придана такая форма, чтобы ее можно было повернуть вручную либо путем захвата, либо с использованием инструмента, и муфту в сборе, соединяющую ручку со штоком клапана и с редуктором (не показано).
Когда червяк 11 поворачивают с помощью двигателя 4 по стрелке «а» на фиг.2, вокруг продольной оси червяка 11, поворачивается червячное колесо 9 вокруг оси 13 вращения по стрелке «b». Дополнительная ось 13 вращения расположена перпендикулярно оси червяка 9 и совпадает с продольной осью вала 10, приводящего в действие клапан.
Как показано на фиг.2 и 3 привод 1 клапана содержит, по меньшей мере, один датчик, предназначенный для определения положения клапана и/или скорости клапана (не показан), переключатель, управляющий подачей электроэнергии двигателю, контроллер и схему электроснабжения, подключенную к переключателю. Упомянутый датчик может представлять собой любой известный специалистам в области техники датчик, такой как оптический датчик, магнитный датчик, датчик Холла и т.д. Переключатель, управляющий доставкой электроэнергии двигателю, контроллер и схема электроснабжения расположены на трех дискообразных платах 14а, 14b, 14 с, соединенных друг с другом, все дискообразные платы имеют центральные отверстия 15а, 15b, 15с, образующие канал для вала 10, и установлены в камере 6.
Как показано на фиг.4А и 4В, корпус В клапана может представлять собой шар, поворачиваемый устройством позиционирования (не показано), приводимым в действие двигателем 4 или серводвигателем 131 или аналогичным сервомеханизмом. Датчик 132 положения выдает сигнал, указывающий на положение корпуса В клапана. Если использован серводвигатель 131 поворотного типа, то датчик 132 положения может определять угловое положение корпуса В клапана или другого элемента, присоединенного к корпусу В клапана. Отверстие клапана может быть по выбору установлено в заданное открытое положение между полностью открытым положением, как показано на фиг.4А, и закрытым положением, как показано на фиг.4 В. Привод позволяет в реальном времени устанавливать отверстие соответствующего клапана. Угловое положение поворотного механизма D точно задает коэффициент открытия корпуса В клапана.
Как показано на фиг.5, на которой схематически показан процесс, осуществляемый приводом клапана в соответствии с изобретением, контроллер, присоединенный, по меньшей мере, к одному датчику и к схеме электроснабжения, в реальном времени собирает данные, относящиеся к положению и/или скорости клапана, и данные, относящиеся к режиму энергоснабжения, вычисляет корректировку положение и/или скорости пропорционально рассогласованию между собранными данными, относящимися к положению и/или скорости клапана, и собранными данными, относящимися к режиму энергоснабжения, и отправляет новые настройки электроснабжения в схему электроснабжения, причем схема электроснабжения усиливает сигнал контроллера.
Как показано на фиг.6, электронная схема включает в себя переключатель 16, управляющий доставкой электроэнергии двигателю 17, резольвер 18, предназначенный для определения положение клапана и/или скорость клапана, схему 19 электроснабжения, соединенную с переключателем 16, и контроллер 20, соединенный с резольвером 18 и схемой 19 электроснабжения, упомянутый контроллер 20 в реальном времени собирает данные, относящиеся к положению и/или скорости клапана, и данные, относящиеся к режиму энергоснабжения, вычисляет корректировку положения и/или скорости пропорционально рассогласованию между собранными данными, относящимися к положению и/или скорости клапана, и собранными данными, относящимися к режиму энергоснабжения, и отправляет новые настройки электроснабжения в схему электроснабжения, причем схема 19 электроснабжения усиливает сигнал контроллера.
Необходимо отметить, что резольвер 18 может быть заменен на датчик любого известного специалистам в области техники типа, чтобы определять положение клапана и/или скорость клапана, не отклоняясь от объема изобретения.
В варианте осуществления, показанном на фиг.6, схема дополнительно включает в себя декодер 21, соединенный с одной стороны с круговым датчиком 18 положения и с другой стороны с устройством 22 управления декодером. Упомянутое устройство управления декодером соединено с контроллером 20 и с обработчиком 23 ошибок.
Как вариант, двигатель 17 содержит датчик 24 Холла для определения положения и/или вращения упомянутого двигателя.
Упомянутый датчик 24 Холла соединен с блоком 25 регулятора мощности и автопилота переключателя 16.
Более того, контроллер 20 включает в себя устройство 26 управления состоянием, присоединенное к устройству 27 управления режимами, которое присоединено к блоку 28 управления. Блок 28 управления соединен с блоком 25 регулятора мощности и автопилота переключателя 16. Схема включает в себя энергонезависимую память 29 ROM, подключенную к устройству 27 управления режимами, первый аналого-цифровой преобразователь 30, именуемый как АЦП 30, соединенный с первым устройством 31 управления АЦП, которое соединено с устройством 27 управления режимами контроллера 20, второй аналого-цифровой преобразователь (АЦП) 32, соединенный со вторым устройством 33 управления АЦП, которое соединено с устройством 22 управления декодером резольвера 18. Каждый из аналого-цифровых преобразователей 30 и 32 включает в себя, по меньшей мере, один фильтр.
Схема 19 электроснабжения включает в себя фильтр 34, защищающий схему от перегрузок, молний и электромагнитных помех (EMI), первый блок 35 с понижающей, управляющей и фильтрующей функциями и второй блок 36 с понижающей и управляющей функциями.
Схема включает в себя входной/выходной каскад 37, содержащий множество входных логических вентилей и выходных логических вентилей.
Устройство 27 управления режимами содержит, по меньшей мере, три режима, первый режим, называемый "режим повреждения", в котором клапан приводят в действие с постоянной высокой скоростью, независимо от сбоя в датчике положения, второй режим, называемый "режим включен-выключен", в котором двигатель, приводящий в действие клапан, работает с постоянной скоростью, равной примерно четверти от полной скорости, и в котором переключатели 38 используют, чтобы остановить вращение, третий режим, называемый "режим противодействия гидравлическому удару", в котором двигатель приводят в действие в соответствии с управляющим правилом таким образом, что гидравлический удар смягчается или устраняется. Все эти режимы определены входными логическими вентилями EN1 и EN2 входного/выходного каскада 37, а запрос на открытие/закрытие определяется состоянием входного логического вентиля EN3.
Как вариант, устройство 27 управления режимами содержит четвертый режим, называемый "АЕ режимом", в котором упомянутое устройство 27 управления режимами принимает пакет данных от устройства 31 управления АЦП, чтобы определить настройки, соответствующие положению вала главной передачи двигателя. Аналоговый сигнал, поступающий из порта ЕА1, декодируют и преобразуют в 12-битовый пакет данных посредством аналого-цифрового преобразователя (АЦП) 30, затем устройство 31 управления АЦП отправляет упомянутый пакет данных устройству 27 управления режимами.
Блок 25 регулятора мощности и автопилота определяет команды энергомоста транзистора из информации, отправленной датчиком 24 Холла двигателя 17, широтно-импульсную модуляцию (PWM), направление вращения двигателя 17 и режим.
Резольвер 18, управляемый электронным компонентом, таким как, например, AD2S1200, представляет собой датчик положения. Напряжение на резольвере 18 порождается декодером 21, который представляет собой электронный компонент AD2S1200. Вспомогательные сигналы, вырабатываемые резольвером 18, декодируют декодером 21, который преобразует упомянутые вспомогательные сигналы в два числовых 12-битовых пакета данных, первый пакет данных, соответствующий положению, и второй пакет данных, соответствующий скорости. Упомянутый декодер 21 отправляет пакет данных устройству 22 управления декодером, которое, с одной стороны, отправляет устройству 33 управления вторым АЦП и блоку 28 управления пакет данных, соответствующий положению, и, с другой стороны, отправляет обработчику 23 ошибок пакет данных, соответствующий скорости. Упомянутый обработчик 23 ошибок периодически проверяет, что двигатель 18 вращается, т.е., что скорость двигателя 18 не равна нулю в процессе выполнения команды на открытие и/или закрытие.
Более того, обработчик 23 ошибок отслеживает и обнаруживает различные виды сбоев, такие как сбой переключателя, т.е. когда одновременно отправлена информация переключателя об открытии и закрытии, блокировка вала главной передачи двигателя, соответствующая тому, что скорость двигателя равна нулю, сбой резольвера, причем упомянутый сбой обнаруживается декодером 21, сбой согласования положения или обнаружение перегрузки по току.
При обнаружении сбоя информацию о сбое отправляют устройству 27 управления режимами посредством устройства 26 управления состоянием. Затем на блок 28 управления отправляют установку, соответствующую "режиму повреждения".
При обнаружении сбоя, и когда устройство 27 управления режимами получает пакет данных от устройства 31 управления АЦП, блок 28 управления сравнивает эти настройки с копией положения. Затем блок 28 управления усиливает их и определяет направление вращения и амплитуду рассогласования. Упомянутое направление вращения и амплитуду рассогласования отправляют на блок 25 автопилота.
При обнаружении сбоя и, когда устройство 27 управления режимами не получает пакет данных от устройства 31 управления АЦП, устройство 27 управления режимами отправляет блоку 28 управления настройки, соответствующие "режиму противодействия гидравлическому удару". Эти настройки, соответствующие "режиму противодействия гидравлическому удару", сохраняют в энергонезависимой памяти ROM 29, при этом они являются функцией времени в соответствии со следующим уравнением:
настройки электроснабжения = at3-bt2+ct,
где a, b и с - константы, a t- время, выраженное в секундах.
На фиг.7 отображен пример этой функции времени. В этом конкретном примере уравнение имеет следующий вид:
настройки электроснабжения = 0,067t3-0,247t2+0,776t.
Необходимо отметить, что настройки электроснабжения, отправленные контроллером 20 на схему 16 энергоснабжения, являются функцией, по меньшей мере, одного параметра, времени; тем не менее, упомянутые настройки электроснабжения могут быть функцией множества параметров, не отклоняясь от объема изобретения.
Преимущественно, контроллер 20, блок 25 регулятора мощности и автопилота, обработчик 23 ошибок, устройство 22 управления декодером, устройства 31 и 33 управления АЦП и энергонезависимая память ROM 29 содержатся в программируемой логической схеме (PLD), такой как, например, программируемая пользователем вентильная матрица (FPGA), предназначенной для того, чтобы вычислять корректировку положения и/или скорости пропорционально рассогласованию между собранными данными, относящимися к положению и/или скорости клапана, и собранными данными, относящимися к режиму энергоснабжения, и т.д.
Очевидно, что программируемая логическая схема (PLD), в особенности вычисляющая корректировку положения и/или скорости пропорционально рассогласованию между собранными данными, относящимися к положению и/или скорости клапана, и собранными данными, относящимися к режиму энергоснабжения, не отклоняясь от объема изобретения, может быть заменена любым эквивалентным средством, таким как, например, программное обеспечение.
Более того, контроллер 20 преимущественно содержит средство для соединения упомянутого контроллера 20 с электронным управляющим блоком (ECU), приспособленным к соединению с множеством приводов клапана, и/или для соединения упомянутого контроллера 20, по меньшей мере, с одним другим приводом клапана.
Такая архитектура допускает широкий диапазон приложений. Далее в этом документе изложен неограничивающий пример приложения в системе дозаправки воздушного судна.
На фиг.8 приведена схематичная диаграмма системы 100 дозаправки воздушного судна, обычно используемая для дозаправки коммерческих самолетов, таких как А320. Система 100 дозаправки воздушного судна снабжена соленоидными клапанами 111, соединенными по схеме звезда с дозаправочной муфтой 112, которая задает подвод 112а подачи топлива для трубопровода 113 подачи топлива. В этом примере емкость центрального топливного бака 114 равна 8250 литров, а каждый крыльевой топливный бак 115, 116 имеет емкость 6925 литров (внутренние топливные баки). Также может быть установлен дополнительный топливный бак, например, дополнительный центральный топливный бак ACT (не показан).
В вариантах осуществления изобретения предложено оборудование 120 для динамичной дозаправки баковой системы 121 воздушного судна, чтобы минимизировать время дозаправки. Такое оборудование 120 может должным образом использоваться для самолетов, имеющих множество топливных баков, например, три топливных бака 114,115,116.
Оборудование 120 содержит трубопровод 113 подачи топлива, три трубопровода подачи топлива в баки и три топливных бака 114, 115, 116. Трубопровод дозаправки, здесь и далее называемый трубопроводом 122, имеет соответствующие трубки, соединенные с каждым из топливных баков 114, 115, 116. Соединение по схеме звезда сформировано посредством соединения J трубопровода 122. Здесь, один клапан, например, соленоидный клапан 123 расположен между подводом 112а подачи топлива и соединением J, так чтобы функционировать в качестве главного клапана относительно множества управляемых клапанов 124,125,126. Клапан 124 соединен с топливным баком 114, клапан 125 соединен с топливным баком 115, а клапан 126 соединен с топливным баком 116. Соответственно, каждый из этих клапанов 124, 125, 126 позволяет отсоединить каждый топливный бак от трубопровода 113 подачи топлива, так что топливо может быть направлено куда требуется.
Для передачи физического параметра, показывающего характеристики потока в трубопроводе 122, предусмотрен один или несколько датчиков 130. Здесь, датчик 130 представляет собой датчик давления, расположенный между соединением J и соленоидным клапаном 123 или любым аналогичным главным клапаном, непосредственно соединенным с трубопроводом 113 подачи топлива. Датчик давления или аналогичный датчик 130 соединен с электронным управляющим блоком ECU. Этот датчик 130 в сочетании с соответствующим приводом клапана в сборе, также соединенным с электронным управляющим блоком ECU, позволяет осуществлять регулирование соответствующей скорости потока при дозаправке. Датчик 130 также может быть заменен одним или несколькими измерителями скорости течения, расположенными надлежащим образом в трубопроводе 122, при этом каждый выдает сигналы, показывающие скорость потока.
Данные о давлении измеряют датчиком 130 в трубопроводе 122, а данные об открытии первых клапанов 124, 125, 126 получают приемным модулем М электронного управляющего блока. Этот модуль М выполнен так, чтобы оценивать соответствующие параметры потока первого клапана, используя данные о давлении и данные о положении.
Все клапаны 124, 125, 126 могут быть оснащены приводами и устройствами позиционирования, чтобы задать клапан-регулятор потока, осуществляющий управление потоком топлива. Ссылаясь на фиг.4А и 4В, на которых схематически показан неограничивающий пример архитектуры клапана-регулятора потока, корпус В клапана может представлять собой шар, вращаемый обычным устройством позиционирования (не показано), приводимым в действие серводвигателем 131 или аналогичным сервомеханизмом. Здесь, датчик 132 положения выдает сигнал, указывающий на положение корпуса В клапана. Если моторный элемент серводвигателя 131 поворотного типа, то датчик 132 положения может определять угловое положение корпуса В клапана или другого элемента, присоединенного к корпусу В клапана. Отверстие клапанов 124, 125, 126 может быть по выбору установлено в заданное открытое положение между полностью открытым положением, как показано на фиг.4А, и закрытым положением, как показано на фиг.4 В. В результате, может быть установлена скорость потока между двумя клапанными каналами шарового клапана. Привод позволяет в реальном времени регулировать открытие соответствующего первого клапана. Угловое положение поворотного механизма D может точно задавать коэффициент открытия корпуса В клапана.
В то время как здесь представлен проходной шаровой клапан, отличающийся быстрым срабатыванием и долговечностью, понятно, что первые клапаны 124, 125, 126 не обязательно являются шаровыми клапанами или аналогичными клапанами на четверть оборота. В общем случае каждый клапан 124, 125, 126 содержит корпус клапана с множеством регулируемых положений между полностью открытым положением и закрытым положением, чтобы предоставить возможность регулирования потока или давления топлива или аналогичной жидкости, которую необходимо хранить в соответствующих топливных баках 114, 115, 116.
Управление положением соответствующих корпусов клапанов может также принимать в расчет данные о параметре потока и данные об уровне топлива. Здесь, данные об уровне топлива могут быть получены путем измерения уровня топлива в каждом топливном баке 114, 115, 116, который необходимо дозаправить. Одна, а предпочтительно множество установок 134, 135, 136 для измерения могут быть связаны с каждым топливным баком 114, 115, 116, чтобы предоставить электронному управляющему блоку ECU сигнал, показывающий измеренный уровень топлива. В процессе дозаправки электронный управляющий блок обрабатывает сигналы датчика 130 и установок 134, 135, 136 для измерения, чтобы динамически регулировать открытие соответствующих первых клапанов 124, 125, 126. Сигналы датчика 130 или любых аналогичных датчиков, таким образом, преобразуют в данные о параметрах потока через первый клапан, в то время как сигналы установок 134, 135, 136 для измерения преобразуют в данные об уровне топлива. Эти данные или любые аналогичные данные, полученные электронным управляющим блоком ECU, используют, чтобы определить индивидуальные потребности соответствующих топливных баков 124, 125, 126.
Изобретение относится к приводу клапана. Привод клапана включает в себя корпус, двигатель, электрически связанный с основным источником электропитания и соединенный с клапаном, с возможностью изменения положения клапана от первого положения, в котором поток жидкости может протекать, по меньшей мере, вдоль одного пути, до второго положения, в котором поток жидкости либо блокируется, либо может протекать, по меньшей мере, вдоль одного второго пути. По меньшей мере, один датчик выполнен с возможностью определения или положения клапана или скорости клапана. Переключатель управляет подачей электроэнергии двигателю. Схема электроснабжения соединена с переключателем и включает в себя контроллер, соединенный, по меньшей мере, с одним датчиком и схемой электроснабжения. Контроллер предназначен для сбора в реальном времени данных, относящихся к положению или к скорости клапана, и данных, относящихся к режиму энергоснабжения, для вычисления корректировки положения или скорости пропорционально рассогласованию между собранными данными, относящимися соответственно к положению или к скорости клапана, и собранными данными, относящимися к режиму энергоснабжения. Также контроллер предназначен для передачи новых настроек электроснабжения в схему электроснабжения, которая усиливает сигнал контроллера. Изобретение направлено на устранение гидравлического удара. 17 з.п. ф-лы, 9 ил.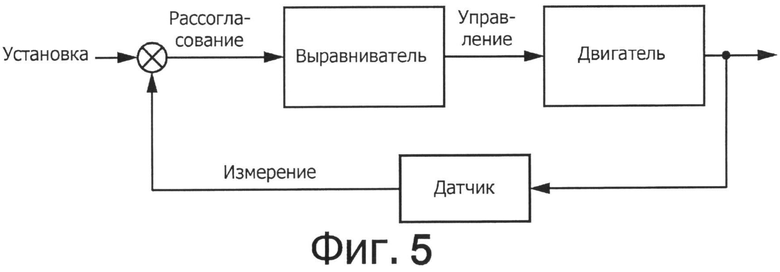
1. Привод (1) клапана, включающий в себя:
- корпус (2),
- двигатель (4), электрически связанный с основным источником электропитания и соединенный с клапаном, с возможностью изменения положения клапана от первого положения, в котором поток жидкости может протекать, по меньшей мере, вдоль одного пути, до второго положения, в котором поток жидкости либо блокируется, либо может протекать, по меньшей мере, вдоль одного второго пути,
- по меньшей мере, один датчик (24, 132), выполненный с возможностью определения или положения клапана или скорости клапана,
- переключатель (16), управляющий подачей электроэнергии двигателю (4),
- схему (19) электроснабжения, соединенную с переключателем (16) и включающую в себя контроллер (20), соединенный, по меньшей мере, с одним датчиком (24, 132) и схемой (19) электроснабжения, и предназначенный для сбора в реальном времени данных, относящихся к положению или к скорости клапана, и данных, относящихся к режиму энергоснабжения, для вычисления корректировки положения или скорости пропорционально рассогласованию между собранными данными, относящимися соответственно к положению или к скорости клапана, и собранными данными, относящимися к режиму энергоснабжения, и для передачи новых настроек электроснабжения в схему (19) электроснабжения, которая усиливает сигнал контроллера.
2. Привод клапана по п.1, отличающийся тем, что клапан представляет собой шаровой клапан.
3. Привод клапана по п.1 или 2, отличающийся тем, что дополнительно содержит редуктор, соединяющий двигатель (4) с клапаном.
4. Привод клапана по любому из пп.1-2, отличающийся тем, что двигатель (4) представляет собой бесщеточный двигатель.
5. Привод клапана по любому из пп.1-2, отличающийся тем, что настройки электроснабжения, переданные контроллером (20) в схему (19) электроснабжения, являются функцией, по меньшей мере, одного параметра.
6. Привод клапана по п.5, отличающийся тем, что настройки электроснабжения, переданные контроллером (20) в схему (19) электроснабжения, являются функцией времени.
7. Привод клапана по любому из пп.1-2, отличающийся тем, что настройки электроснабжения, переданные контроллером (20) в схему (19) электроснабжения, сохраняют в энергонезависимой памяти (29).
8. Привод клапана по п.6, отличающийся тем, что настройки электроснабжения являются функцией времени согласно следующему уравнению:
настройки электроснабжения = at3-bt2+ct,
где a, b и с - константы, a t - время, выраженное в секундах.
9. Привод клапана по любому из пп.1-2, отличающийся тем, что содержит средство определения отказа двигателя.
10. Привод клапана по любому из пп.1-2, отличающийся тем, что контроллер (20) содержит средство, предназначенное для соединения упомянутого контроллера (20) с электронным управляющим блоком (ECU), предназначенным для соединения с несколькими приводами (1) клапана.
11. Привод клапана по любому из пп.1-2, отличающийся тем, что контроллер (20) содержит средство, предназначенное для соединения контроллера (20), по меньшей мере, с одним другим приводом (1) клапана.
12. Привод клапана по любому из пп.1-2, отличающийся тем, что двигатель (4) содержит датчик (24) Холла для определения положения и/или вращения упомянутого двигателя (4).
13. Привод клапана по любому из пп.1-2, отличающийся тем, что блок редуктора, соединяющий двигатель (4) с клапаном, включает в себя червячную передачу (11, 12).
14. Привод клапана по п.13, отличающийся тем, что блок редуктора включает в себя ручку, имеющую форму, обеспечивающую ее поворот вручную либо путем захвата, либо с использованием инструмента.
15. Привод клапана по п.14, отличающийся тем, что блок редуктора включает в себя муфту в сборе, соединяющую ручку со штоком клапана и с редуктором.
16. Привод клапана по любому из пп.1-2, отличающийся тем, что контроллер (20) включает в себя средство для вычисления корректировки положения и/или скорости пропорционально рассогласованию между собранными данными, относящимися к положению и/или скорости клапана, и собранными данными, относящимися к режиму энергоснабжения.
17. Привод клапана по любому из пп.1-2, который дополнительно содержит средство, приспособленное для обнаружения сбоев в приводе (1) клапана, таких как сбой контроллера (20), ошибочное положения клапана или, например, перегрузка по току.
18. Привод клапана по п.17, в котором при обнаружении сбоя в приводе (1) клапана открытие и/или закрытие заслонки клапана осуществляют с постоянной скоростью.
| WO 9960291 A1 (TACO INC [US]), 25.11.1999 | |||
| US2007034264 A1 (STONEL CORP [US]), 15.02.2007 | |||
| US6460567 B1 (HANSEN TECHNOLOGIES CORPPORATI [US]), 08.10.2002 | |||
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ДЛЯ ЗАПОРНОЙ АРМАТУРЫ | 2002 |
|
RU2235934C2 |

