Изобретение относится к машиностроению и может использоваться для управления запорной арматурой в различных отраслях промышленности.
Известен электропривод, содержащий электродвигатель, предельные выключатели крутящего момента, предельные выключатели положения, шунтирующие цепи управления, таймеры для разрывания цепей управления [1].
Недостатками указанного электропривода является сложность конструкции и низкая надежность.
Известен выбранный в качестве прототипа автоматизированный электропривод для запорной арматуры, который содержит электродвигатель, силовой коммутатор, запорный элемент, шпиндель, редуктор, блок индикации, таймер [2].
Задачей, выполняемой данным изобретением, является повышение качества непрерывного диагностирования положения запорного элемента и расширение функциональных возможностей электропривода за счет автоматизации его управления.
Это достигается тем, что автоматизированный электропривод для запорной арматуры, содержащий электродвигатель, силовой коммутатор, запорный элемент, шпиндель, редуктор, блок индикации, таймер, снабжен блоком диагностирования положения запорного элемента, выполненным в виде импульсного магнитно-индуктивного датчика, статор которого жестко соединен с корпусом запорной арматуры, а ротор соединен со шпинделем с возможностью вращения относительно статора при перемещении шпинделя, а также снабжен устройством управления, первый выход которого соединен с входом силового коммутатора и с входом таймера, второй выход соединен с входом блока индикации, а первый, второй и третий входы соединены соответственно с выходом блока диагностирования положения запорного элемента, с выходом силового коммутатора и с выходом таймера.
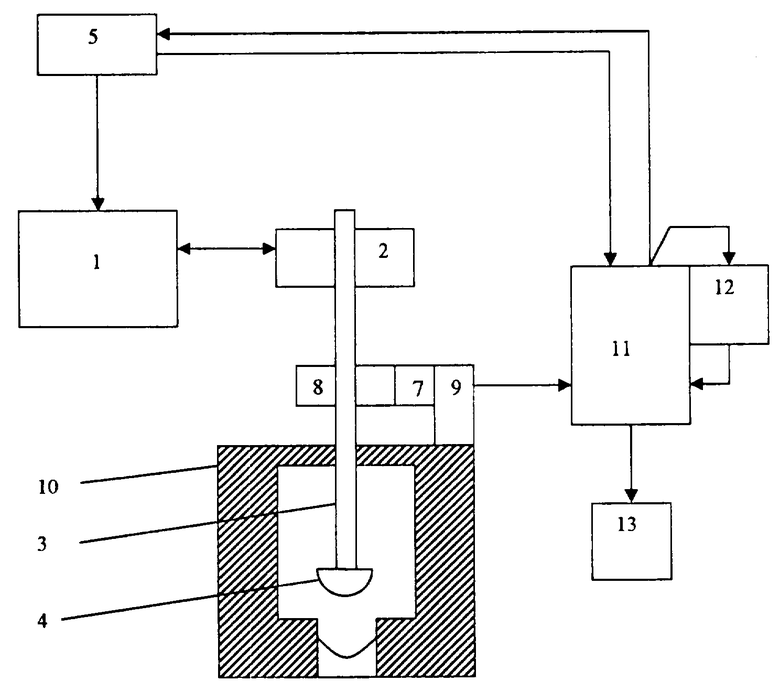
На чертеже изображена блок-схема предложенного автоматизированного электропривода для запорной арматуры.
Электродвигатель 1, например, 3-фазный асинхронный, через редуктор 2, например, червячный, соединен со шпинделем 3, выступающий конец которого соединен с запорным элементом 4. Силовой коммутатор 5 оснащен, например, контакторами, подающими питание на электродвигатель 1, обеспечивая его вращение в прямом или обратном направлении. В случае необходимости силовой коммутатор 5 может быть оснащен средствами определения наличия и чередования фаз питания, замера тока по фазам. Блок 6 диагностирования положения запорного элемента выполнен в виде импульсного магнитно-индуктивного датчика, например, на основе герконов. В этом варианте ротор 7 блока 6 диагностирования положения запорного элемента может быть выполнен, например, в виде диска из немагнитного материала, по внешнему краю которого жестко закреплены постоянные магниты на одинаковом расстоянии друг от друга. Ротор 7 блока 6 диагностирования положения запорного элемента соединяется со шпинделем 3, например, с помощью редуктора 8, передаточный коэффициент которого, а также количество постоянных магнитов выбирают в зависимости от необходимого количества импульсов, их дискретности, т.е. точности настройки. Статором 9 блока 6 диагностирования положения запорного элемента является геркон, корпус которого жестко соединен с корпусом 10 запорной арматуры. При необходимости редуктор 2 может быть оснащен, например, тензометрическим датчиком для контроля крутящего момента, прикладываемого к шпинделю 3.
Устройство 11 управления может быть выполнено, например, на базе микропроцессора, оснащенного средствами выдачи команд электроприводу и средствами обращения к памяти и к программному обеспечению. В качестве таймера 12 может быть использовано известное электронное устройство, формирующее временные метки необходимой дискретности. Блок 13 индикации может быть, например, выполнен на основе жидких кристаллов и светодиодов.
Электронные составные части электропривода характеризуются малым энергопотреблением, что позволяет обеспечить их электропитанием от автономного источника, например, миниатюрного литиевого со сроком использования до 10 лет.
Составные части электропривода могут крепиться на выступающей части шпинделя и могут компоноваться в виде отдельных съемных узлов, например электродвигатель 1 совместно с редуктором 2, устройство 11 управления совместно с таймером 12 и блоком 13 индикации. В случае необходимости шпиндель может быть оснащен ручным приводом.
Предлагаемый электропривод работает следующим образом.
При вводе электропривода в эксплуатацию в память устройства 11 управления записывают данные, характеризующие параметры запорной арматуры:
- программное количество импульсов, которое должен выдать блок 6 диагностирования запорного элемента в положениях “Открыто” (“О”) и “Закрыто” (“З”) и в обратном направлении от “З” до “О”;
- программные временные интервалы по каждому из всех импульсов, которые должен выдать блок 6 диагностирования положения запорного элемента в прямом и обратном направлениях.
Программные временные интервалы ожидания первого импульса как в положении “З”, так в положении “О” определяются с учетом возможного заклинивания запорной арматуры. В программе устройства 11 управления могут быть предусмотрены несколько циклов включения электродвигателя 1 с целью преодоления заклинивания. Программные временные интервалы по каждому из импульсов учитывают безопасное “заедание” запорной арматуры, например, при загустении смазки.
При эксплуатации устройство 11 управления, например, кнопкой выдает команду перевести запорную арматуру из положения “О” в положение “З”, выдает в силовой коммутатор 5 команду на выдачу питания на электродвигатель 1, сигнал на запуск таймера 12. Электродвигатель 1, начиная вращаться, перемещает через редуктор 2 шпиндель 3 в прямом направлении. Блок 6 диагностирования положения запорного элемента выдает импульсы, время прихода которых контролируется устройством 11 управления с помощью таймера 12 и временных интервалов, записанных в памяти.
При нормальной работе электропривода устройство 11 управления получает количество импульсов, соответствующее программному, а по приходу последнего импульса в заданный временной интервал выдаст команду на отключение электродвигателя 1.
В случае нарушения работоспособности и запорной арматуры, например заклинивания, а также при неисправности в элементах электропривода устройство 11 управления не получит в программный временной интервал какой-то очередной импульс из блока 6 диагностирования положения запорного элемента и выдаст команду на снятие напряжения с электродвигателя 1.
Запорный элемент 4 электропривода можно установить в любом промежуточном положении между “О” и “З”. С этой целью с устройства 11 управления выдается команда в виде процента от полного открытия, например, “О-60%”. Блок 6 диагностирования положения запорного элемента выдаст заданное количество импульсов 60%, а устройство 11 управления по приходу последнего из этих импульсов отключит электродвигатель 1.
Устройство 11 управления может документировать нормальные срабатывания электропривода и аварийные остановки запорного элемента, а также отображать на блоке 13 индикации текущую информацию о работе электропривода и информацию, записанную в памяти устройства 11 управления.
Преимущество предложенного автоматизированного электропривода для запорной арматуры в том, что он обеспечивает повышение качества непрерывного диагностирования положения запорного элемента за счет введения блока диагностирования положения запорного элемента, выполненного в виде импульсного магнитно-индуктивного датчика, а также расширение функциональных возможностей электропривода за счет введения блока управления, выполняющего функции автоматизации управления, что является существенными отличиями от прототипа.
Источники информации
1. Япония з. 5-49870 кл. F 16 K 31/05, опубл. 27.07.93.
2. РФ пат. 2005945 кл. F 16 K 31/04, опубл. 15.01.94 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД ДЛЯ ЗАПОРНОЙ АРМАТУРЫ | 2005 |
|
RU2301935C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 2017 |
|
RU2659806C1 |
| Система диагностирования электроприводной арматуры | 2019 |
|
RU2711240C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2005 |
|
RU2290745C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЗАПОРНОЙ АРМАТУРЫ | 2006 |
|
RU2314450C1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2285182C2 |
| ЭЛЕКТРОПРИВОД | 2016 |
|
RU2627489C1 |
| Безредукторный электрический привод запорной арматуры | 2016 |
|
RU2659703C2 |
| СПОСОБ ВОЗДЕЙСТВИЯ НА ЗАСТОЙНУЮ ЗОНУ ИНТЕРВАЛОВ ПЛАСТОВ ГАРИПОВА И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2529072C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2021 |
|
RU2780757C1 |
Изобретение относится к машиностроению и может использоваться для управления запорной арматурой в различных отраслях промышленности. Изобретение позволяет повысить качество непрерывного диагностирования положения запорного элемента и расширить функциональные возможности автоматизированного электропривода за счет автоматизации его управления. Автоматизированный электропривод для запорной арматуры содержит электродвигатель, силовой коммутатор, запорный элемент, шпиндель, редуктор, блок индикации, таймер. Устройство снабжено блоком диагностирования положения запорного элемента, выполненным в виде импульсного магнитно-индуктивного датчика, статор которого жестко соединен с корпусом запорной арматуры. Ротор соединен со шпинделем с возможностью вращения относительно статора при перемещении шпинделя. Первый выход устройства управления соединен с входом силового коммутатора и с входом таймера, а второй выход соединен с входом блока индикации. Первый, второй и третий входы соединены соответственно с выходом блока диагностирования положения запорного элемента, с выходом силового коммутатора и с выходом таймера. 1 ил.
Автоматизированный электропривод для запорной арматуры, содержащий электродвигатель, силовой коммутатор, запорный элемент, шпиндель, редуктор, блок индикации, таймер, отличающийся тем, что снабжен блоком диагностирования положения запорного элемента, выполненным в виде импульсного магнитно-индуктивного датчика, статор которого жестко соединен с корпусом запорной арматуры, а ротор соединен со шпинделем с возможностью вращения относительно статора при перемещении шпинделя, а также снабжен устройством управления, первый выход которого соединен с входом силового коммутатора и с входом таймера, второй выход соединен с входом блока индикации, а первый, второй и третий входы соединены соответственно с выходом блока диагностирования положения запорного элемента, с выходом силового коммутатора и с выходом таймера.
| ЭЛЕКТРОПРИВОД ДЛЯ АВТОМАТИЗИРОВАННОЙ АРМАТУРЫ | 1990 |
|
RU2005945C1 |
| DE 3706621 A1, 03.09.1987 | |||
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 1990 |
|
RU2014538C1 |
| DE 19715239 A1, 22.10.1988 | |||
| US 5318064 A, 07.06.1994. | |||

