ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к технологиям магнитного резонанса, технологиям магнитно-резонансного формирования изображений, технологиям магнитно-резонансной спектроскопии, технологиям медицинского магнитно-резонансного формирования изображений и спектроскопии и смежным областям техники.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Качество магнитно-резонансного (МР) изображения зависит от однородности передаваемого поля B1. По данной причине, радиочастотные катушки, применяемые для возбуждения магнитного поля, выполняют с возможностью формирования, по существу, однородного передаваемого поля B1 по области сканирования (FOV). Однородность можно создать посредством использования множества или решетки радиочастотных передающих катушек, которые стратегически устанавливают относительно FOV (области сканирования), для совместного формирования ими, по существу, однородного передаваемого поля B1 по FOV (области сканирования). Однако данная конструкция имеет недостатки. Кроме того, передаваемое поле B1, рассчитанное на однородность в незаполненном состоянии, может искажаться магнитной восприимчивостью объекта исследования. Данное явление известно как эффект загрузки объекта исследования, и данный эффект становится особенно заметным с усилением статического магнитного поля B0, например, при статическом магнитном поле, приблизительно, 3 Тесла или выше. Эффектом загрузки объекта исследования нельзя пренебрегать даже при менее сильном статическом магнитном поле.
Для повышения степени однородности передаваемого поля B1 либо в незаполненном, либо в заполненном состояниях можно применить шиммирование B1. Дополнительно или в качестве альтернативы, неоднородность передаваемого поля B1 можно компенсировать математически во время обработки для реконструкции МР изображений после получения данных. Пространственное отображение передаваемого поля B1 является входной информацией как для шиммирования B1, так и для математической компенсации после получения данных. С учетом эффекта загрузки объекта, отображение передаваемого поля B1 получают, предпочтительно, с конкретным объектом исследования, проходящим процедуру формирования изображения, загруженным в МР сканер и находящемся в положении формирования изображения. В альтернативном варианте, отображение передаваемого поля B1 можно получать с иллюзией, соответственно подобной объекту исследования, загружаемой в МР сканер.
В существующих МР последовательностях отображения передаваемого поля B1 измерения выполняют для каждого отдельного канала передачи или передающей катушки по двум или трем измерениям. Поэтому для N-катушечной решетки, где N означает число катушек, выполняется N последовательностей отображения передаваемых полей. К сожалению, упомянутые МР последовательности отображения передаваемого поля B1 являются относительно медленными и нежелательным образом увеличивают время сеанса формирования изображения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В соответствии с некоторыми наглядными вариантами осуществления, показанными и описанными для примера в настоящей заявке, способ содержит: этап выполнения некоторого числа последовательностей отображения поля B1, с использованием набора радиочастотных передающих катушек, для получения набора данных отображения поля B1, при этом упомянутое число меньше, чем число радиочастотных передающих катушек в наборе радиочастотных передающих катушек; и этап определения чувствительностей катушек для набора радиочастотных передающих катушек, на основании полученного набора данных отображения поля B1.
В соответствии с некоторыми наглядными вариантами осуществления, показанными и описанными для примера в настоящей заявке, носитель данных хранит команды, исполняемые цифровым процессором для выполнения способа, описанного в непосредственно предшествующем параграфе. В соответствии с некоторыми наглядными вариантами осуществления, показанными и описанными для примера в настоящей заявке, цифровой процессор сконфигурирован с возможностью выполнения способа, описанного в непосредственно предшествующем параграфе. В соответствии с некоторыми наглядными вариантами осуществления, показанными и описанными для примера в настоящей заявке, магнитно-резонансная система содержит: магнитно-резонансный сканер; набор радиочастотных передающих катушек и цифровой процессор, сконфигурированный с возможностью выполнения способа, описанного в непосредственно предшествующем параграфе, при этом этап выполнения некоторого числа последовательностей отображения поля B1 содержит побуждение магнитно-резонансного сканера выполнять упомянутые последовательности отображения поля B1, с использованием упомянутого набора радиочастотных передающих катушек.
Одно из преимуществ заключается в обеспечении более эффективного шиммирования B1.
Другое преимущество заключается в обеспечении более эффективного отображения передаваемого поля B1.
Дополнительные преимущества станут очевидными для специалистов в данной области техники после прочтения и изучения нижеследующего подробного описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРНТЕЖЕЙ
Чертежи предназначены только для иллюстрации предпочтительных вариантов осуществления и не подлежат истолкованию в смысле ограничения настоящего изобретения. Соответствующие цифровые позиции, при использовании на различных фигурах, представляют соответствующие элементы на этих фигурах.
Фиг.1 - схематичное изображение магнитно-резонансной системы, содержащей или действующей в сочетании с набором радиочастотных передающих катушек и модулем шиммирования B1.
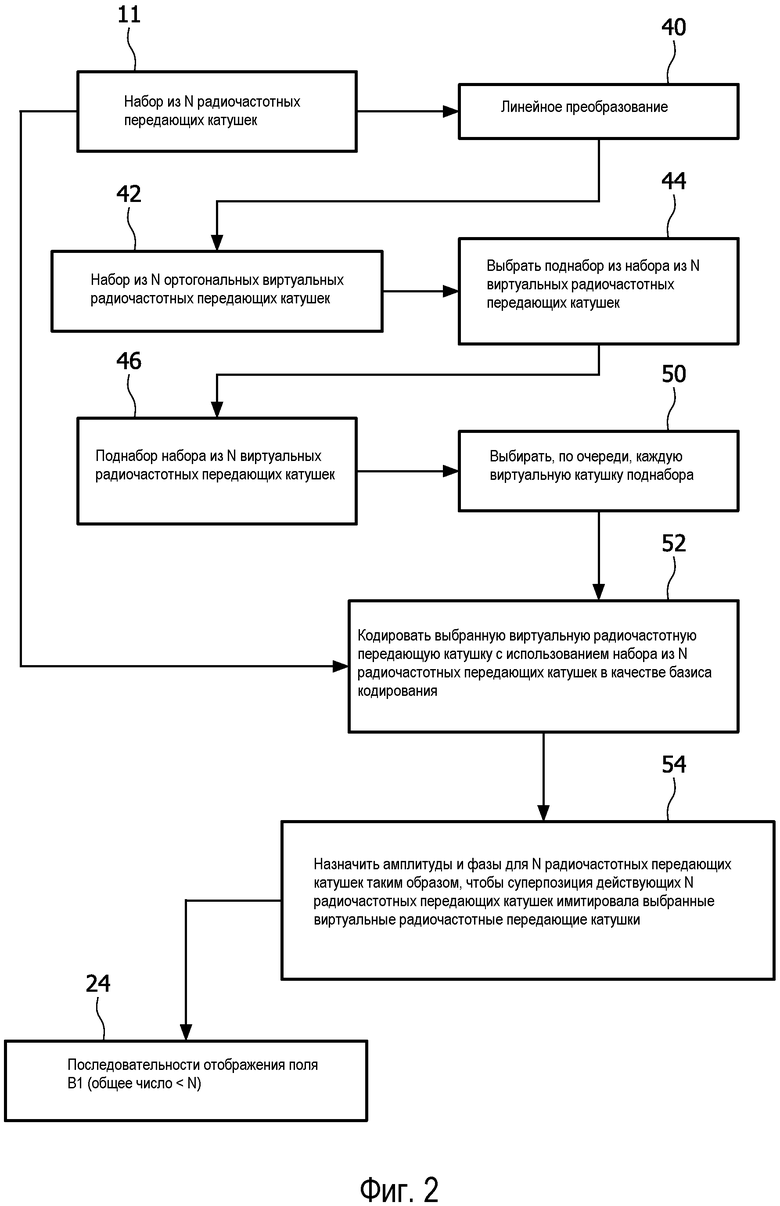
Фиг.2 - блок-схемы последовательностей операций процедуры, соответствующим образом выполняемой процессором модуля шиммирования B1, представленным на Фиг.1, который сконфигурирован с возможностью определения сокращенного числа последовательностей отображения B1.
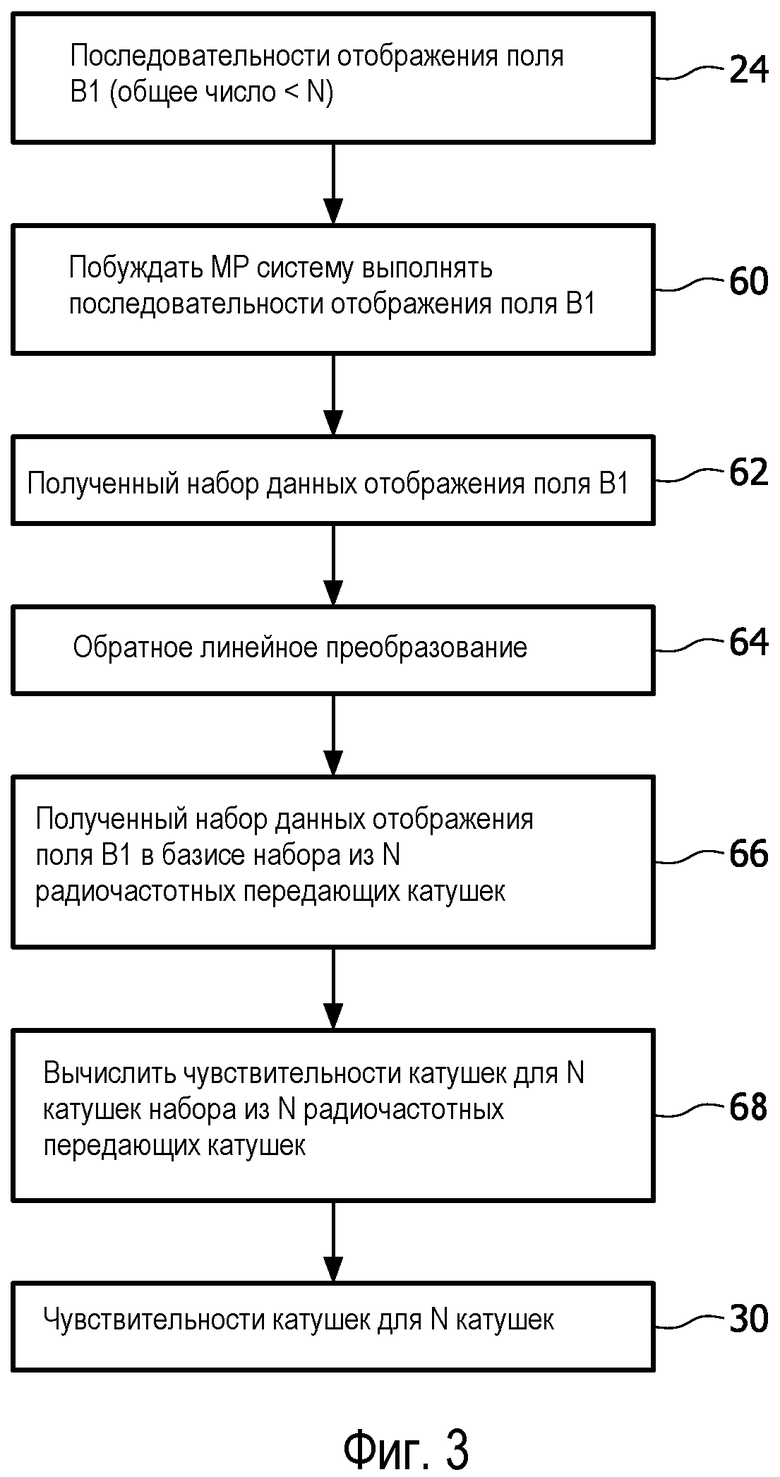
Фиг.3 - блок-схемы последовательностей операций процедуры, соответствующим образом выполняемой процессором или процессорами модуля шиммирования B1, представленным(и) на Фиг.1, который(ые) сконфигурирован(ы) с возможностью побуждать МР систему выполнять последовательности отображения B1 для получения набора данных отображения поля B1 и для определения чувствительностей катушек для набора из N радиочастотных передающих катушек, на основании полученного набора данных отображения поля B1.
Фиг.4-7 - некоторые иллюстративные отображения чувствительности катушек.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Как показано на фиг.1, система формирования изображений содержит магнитно-резонансный (МР) сканер 10, например, изображенный магнитно-резонансный сканер Achieva™ (поставляемый компанией Koninklijke Philips Electronics N.V., Eindhoven, Нидерланды), или магнитно-резонансный сканер Intera или Panorama (также поставляемые компанией Koninklijke Philips Electronics N.V.), или другой коммерчески доступный магнитно-резонансный сканер, или некоммерческий магнитно-резонансный сканер и т.д. В типичном варианте осуществления, магнитно-резонансный сканер содержит внутренние компоненты (не показанные), например, сверхпроводящий или резистивный основной магнит, формирующий статическое магнитное поле (B0), и набор катушечных обмоток для формирования градиентов магнитного поля для наложения выбранных градиентов магнитного поля на статическое магнитное поле.
Кроме того, МР сканер содержит или действует в сочетании с набором радиочастотных передающих катушек 11, число которых равно N. Например, набор радиочастотных передающих катушек 11 может быть решеткой из восьми передающих катушек (при этом, N=8) или может быть решеткой из шестнадцати передающих катушек (при этом, N=16), решеткой из двадцати передающих катушек (при этом, N=20) и т.д. Набор радиочастотных передающих катушек 11 может быть реализован в виде интегрированного блока решетки катушек, в котором общий корпус или опора содержит или служит опорой для N радиочастотных передающих катушек, или N радиочастотных передающих катушек могут быть отдельно реализованы в виде отдельных блоков катушек, могут содержать некоторую комбинацию отдельных и организованных в группы корпусов или опор и т.п. В некоторых вариантах осуществления, набор радиочастотных передающих катушек 11 может быть реализован в виде элементов катушек из блока катушек для головы, блока катушек для тела или другого блока локальных катушек, содержащего множество элементов катушек. МР сканер 10 дополнительно содержит или действует в сочетании с одной или большим числом радиочастотных приемных катушек, которые могут быть реализованы в виде набора радиочастотных передающих катушек 11 (при этом, катушки набора радиочастотных передающих катушек 11 сконфигурированы в виде передающих/приемных или T/R катушек) или могут быть реализованы в виде одной или большего числа отдельных приемных катушек (не показанных на фиг.1).
Магнитно-резонансный сканер 10 и набор радиочастотных передающих катушек 11 работают с управлением от модуля 12 управления магнитным резонансом, чтобы исполнять магнитно-резонансную последовательность, которая задает возбуждение магнитного резонанса, и принимать магнитно-резонансные сигналы, формируемые при возбуждении магнитного резонанса. В представленном прикладном примере МР формирования изображений, в набор радиочастотных передающих катушек 11 подают ток для возбуждения магнитного резонанса, который пространственно кодируется градиентами магнитного поля, селективно прилагаемыми катушками формирования градиентов магнитного поля МР сканера 10, а возбужденные и пространственно кодированные магнитно-резонансные сигналы считываются с использованием приемной(ых) катушки или катушек. По желанию, возбуждение магнитного резонанса пространственно ограничивают слоем или другой областью возбуждения при помощи градиента магнитного поля, прилагаемого катушками формирования градиентов магнитного поля МР сканера 10 во время фазы возбуждения магнитного резонанса.
В представленном прикладном примере, модуль 14 реконструкции реконструирует полученные магнитно-резонансные сигналы для формирования магнитно-резонансных изображений, которые записываются в память 16 магнитно-резонансных изображений. В других вариантах применения, используют соответствующую обработку после получения данных, вместо или в сочетании с обработкой для реконструкции изображений. Например, в варианте применения для МР спектроскопии, МР сигнал из выбранного места можно изобразить в виде функции от частоты, или МР сигнал можно фильтровать по частоте и так далее. В некоторых вариантах осуществления, компоненты 12, 14, 16 являются универсальными коммерческими изделиями для магнитно-резонансного формирования изображений, поставляемыми изготовителем магнитно-резонансного сканера 10 и/или, по меньшей мере, одной третьей стороной-поставщиком. В альтернативном варианте, по меньшей мере, один или все компоненты 12, 14, 16 могут быть компонентами, выполненными по специальному заказу или измененными соответственно требованиям заказчика.
Как также видно из фиг.1, модуль 20 шиммирования B1 функционально взаимодействует с МР системой, например, с модулем 12 управления МР, чтобы задавать МР системе режим выполнения шиммирования B1 для повышения пространственной однородности передаваемого поля B1, формируемого набором радиочастотных передающих катушек 11. С данной целью, процессор 22 сконфигурирован с возможностью определения сокращенного числа последовательностей отображения B1 для выполнения отображения поля B1. Выражение «сокращенное число» означает, что число подлежащих выполнению последовательностей отображения B1 меньше чем число N радиочастотных передающих катушек в наборе радиочастотных передающих катушек 11. Процессор 22 выдает последовательности 24 отображения поля B1, число которых меньше, чем N. Процессор 26 сконфигурирован с возможностью задавать МР системе 10, 11, 12 выполнение последовательностей 24 отображения поля B1, чтобы формировать набор данных отображения поля B1. Процессор 28 сконфигурирован с возможностью определения чувствительностей 30 катушек для набора из N радиочастотных передающих катушек 11 на основании полученного набора данных отображения поля B1.
На фиг.1 показан модуль 20 шиммирования, содержащий процессоры 22, 26, 28, изображенные по отдельности, но, в некоторых вариантах осуществления, процессоры 22, 26, 28 могут быть исполнены в виде единственного процессора, который, по желанию, является тем же самым процессором, который реализует модуль 12 управления МР. Например, в соответствующем варианте, представленный компьютер C содержит цифровой процессор (не показанный), который запрограммирован программным обеспечением, хранящимся на носителе данных (например, жестком диске или другом магнитном диске, оптическом диске, во флэш-памяти или другой электростатической памяти, оперативной памяти, постоянной памяти и т.д.), чтобы реализовать различные компоненты 12, 22, 26, 28 и, по желанию, также модуль 14 реконструкции. Показанный на фигуре компьютер C содержит также дисплей D и, по меньшей мере, одно устройство пользовательского ввода, например, показанную на фигуре клавиатуру K. Например, дисплей D можно использовать для отображения реконструированных изображений, вызываемых из памяти 16 изображений, тогда как, по меньшей мере, одно устройство K пользовательского ввода может служить для предоставления радиологу или другому пользователю возможности ввода команд для управления МР системой 10, 11, 12, модулем 14 реконструкции и модулем 20 шиммирования B1.
Сформированные чувствительности 30 катушек соответствующим образом применяются для выполнения шиммирования B1 набора радиочастотных передающих катушек 11 во время фазы передачи магнитно-резонансных последовательностей, выполняемого МР системой 10, 11, 12, чтобы повысить пространственную однородность передаваемого поля B1, формируемого набором радиочастотных передающих катушек 11, по меньшей мере, в пределах области сканирования (FOV).
Эффективность модуля 20 шиммирования повышается посредством существенного сокращения числа последовательностей 24 отображения поля B1, по сравнению с числом N передающих катушек набора радиочастотных передающих катушек 11. В некоторых вариантах осуществления, например, число последовательностей 24 отображения поля B1 составляет половину от N, тогда как, в других вариантах осуществления, число последовательностей 24 отображения поля B1 меньше, чем половина от N. Процессор 22 сконфигурирован с возможностью выбора последовательностей 24 отображения поля B1 таким образом, что сокращенное число последовательностей 24 отображения поля B1 все же позволяет обеспечивать большую часть от информации отображения поля B1, которая обеспечивается обычным набором последовательностей отображения поля B1, в котором для каждой передающей катушки выполняется по одной последовательности отображения поля B1 (всего исполняется N последовательностей).
Пример процедуры, соответствующим образом выполняемой процессором 22, описан со ссылкой на фиг.1 и, дополнительно, на фиг.2. По набору радиочастотных передающих катушек 11 выполняется линейное преобразование 40 для формирования набора ортогональных виртуальных радиочастотных передающих катушек 42. Линейное преобразование 40 выбирается соответствующим образом для отделения высокочастотных составляющих передаваемого поля B1 от низкочастотных составляющих передаваемого поля B1. Например, в некоторых вариантах осуществления, линейное преобразование 40 является, соответственно, преобразованием собственных мод, для которого более высокие собственные моды, обычно, реализуют более высокочастотные составляющие передаваемого поля B1, тогда как низкие собственные моды, обычно, реализуют низкочастотные составляющие передаваемого поля B1. В процессе операции 44 выбора выбирается поднабор 46 из набора ортогональных виртуальных радиочастотных передающих катушек 42. Поднабор 46 соответственно выбирается так, чтобы, по существу, сохранять низкочастотные составляющие передаваемого поля B1, с исключением, при этом, из выбранного поднабора 46 виртуальных радиочастотных передающих катушек, которые формируют передаваемое поле B1 с преимущественно высоким пространственно-частотным содержимым. Например, в вариантах осуществления, в которых линейное преобразование 40 является преобразованием собственных мод, операция 44 выбора выбирает, соответственно, множество виртуальных радиочастотных передающих катушек из набора ортогональных виртуальных радиочастотных передающих катушек 42, которые имеют наименьшие порядки собственных мод.
Например, можно рассмотреть случай, в котором набор радиочастотных катушек 11 содержит N=8 катушек, и преобразование собственных мод применяется так, что набор ортогональных виртуальных радиочастотных передающих катушек 42 содержит виртуальные радиочастотные катушки, соответствующие собственным модам 0-7. Если требуется, чтобы число последовательностей отображения передаваемого поля B1 составляло половину от числа катушек (то есть, составляло четыре последовательности отображения поля B1 в настоящем примерном случае), то операция 44 выбора соответственно выбирает поднабор 46, состоящий из четырех виртуальных радиочастотных катушек, соответствующих наименьшим порядкам 0-3 собственных мод.
Без ограничения любой конкретной теорией работы, предполагается, что шиммирование B1 должно оптимально реализоваться в форме операции пространственного сглаживания. Предполагается, что шиммирование B1 должно эффективно выполняться в виде коррекции плавных или крупномасштабных пространственных вариаций передаваемого поля B1, соответствующих низким пространственным частотам. С другой стороны, предполагается, что шиммирование B1 должно быть менее эффективным в виде коррекции резких или мелкомасштабных пространственных вариаций передаваемого поля B1, соответствующих высоким пространственным частотам. Соответственно, посредством сохранения в выбранном поднаборе 46 таких виртуальных радиочастотных передающих катушек, которые формируют передаваемое поле B1 с преимущественно низкими пространственно-частотными составляющими, с исключением, при этом, из выбранного поднабора 46 таких виртуальных радиочастотных передающих катушек, которые формируют передаваемое поле B1 с преимущественно высоким пространственно-частотным содержимым, можно рассчитывать получить поднабор 46, обеспечивающий пространственно низкочастотную информацию, которую можно легко скорректировать посредством шиммирования B1, с исключением, при этом, пространственно более высокочастотной информации, эффективная коррекция которой посредством шиммирования B1 является менее вероятной.
Поднабор 46 из набора ортогональных виртуальных радиочастотных передающих катушек 42 идентифицирует наиболее подходящую информацию, касающуюся отображения поля B1, которая, в предпочтительном варианте, получается посредством последовательностей 24 отображения передаваемого поля B1. Однако поднабор 46 является представлением в базисе линейного преобразования 40. С другой стороны, последовательности 24 отображения передаваемого поля B1 реализуются с использованием набора N радиочастотных передающих катушек 11. Соответственно, каждая виртуальная радиочастотная передающая катушка поднабора 46 выбирается, в свою очередь, в процессе операции 50 выбора, и для выбранной виртуальной катушки выполняется операция 52 кодирования. Операция 52 кодирования кодирует выбранную виртуальную радиочастотную передающую катушку с использованием набора из N радиочастотных передающих катушек в качестве базиса кодирования. Операция 52 кодирования дает амплитуды и фазы 54 для N радиочастотных передающих катушек 11 исходя из условия, чтобы суперпозиция N радиочастотных передающих катушек 11, работающих с выбранными амплитудами и фазами, имитировала бы выбранную виртуальную радиочастотную передающую катушку. Эта процедура 50, 52, 54 повторяется для каждой виртуальной катушки из поднабора 46 для формирования последовательностей 24 отображения передаваемого поля B1. В сумме, набор ортогональных виртуальных радиочастотных передающих катушек 42 задает последовательности 24 отображения передаваемого поля B1 посредством операций 50, 52, 54 кодирования.
Пример процедуры, соответствующим образом выполняемой процессорами 26, 28, описан со ссылкой на фиг.1 и, дополнительно, на фиг.3. Процессор 26 выполняет операцию 60, состоящую в побуждении МР системы 10, 11, 12 выполнять последовательности 24 отображения передаваемого поля B1, которые определяются процессором 22. Операция 60 получения данных формирует полученный набор 62 данных отображения поля B1, составляющие которого отображают суперпозицию передаваемых полей B1, соответствующих поднабору 46 виртуальных радиочастотных передающих катушек. Чтобы обеспечить отображение поля B1 для радиочастотных передающих катушек физического набора радиочастотных передающих катушек 11, полученный набор 62 данных отображения поля B1 преобразуется, например, посредством показанного обратного линейного преобразования 64, которое является обратным линейному преобразованию 40 (см. фиг.2), для формирования соответствующего набора 66 данных отображения поля B1 в базисе набора из N радиочастотных передающих катушек 11. Набор 66 данных отображения поля B1 соответствует набору данных отображения поля B1, например, в том, что, обычно, получается с использованием N последовательностей отображения поля B1, выполняемых последовательно, с использованием N физических катушек. Соответственно, в ходе вычислительной операций 68 вычисляются чувствительности 30 катушек для N катушек набора из N радиочастотных передающих катушек 11, в базисе набора 66 данных отображения поля B1. В некоторых вариантах осуществления, вычислительная операция 68 производится ab initio (с начала) для вычисления чувствительностей 30 катушек для N катушек набора из N радиочастотных передающих катушек 11. В других вариантах осуществления используется также априорная информация о чувствительностях 30 катушек. Например, априорная информация о чувствительностях 30 катушек может быть представлена в форме сохраненного набора чувствительностей катушек для набора радиочастотных передающих катушек 11, и вычислительная операция 68 корректирует сохраненный набор чувствительностей катушек на основании полученного набора 66 данных отображения поля B1, представленного в базисе набора из N радиочастотных передающих катушек 11.
Описание приведено для наглядного примера предлагаемого отображения передаваемого поля B1. Распределение чувствительности (отображение B1) каждой отдельной катушки набора радиочастотных передающих катушек 11 преобразуется в систему характеристических катушек, с использованием преобразования собственных мод, которое отображает физические катушки 11, описываемые матрицей S, в соответствующую виртуальную систему собственных мод, в которой виртуальные катушки соответствуют собственным модам. Строки матрицы S формируют векторы, которые содержат пространственные чувствительности отдельных передающих катушек. Чувствительности S катушек можно представить в виде сингулярной декомпозиции их значений (SVD) как S=U×Σ×VH, где матрица Σ содержит сингулярные значения, которые соответствуют собственным значениям решетки катушек. Матрица U или, точнее, преобразование Эрмита от U (UH), выполняет функцию матрицы проекции, отображающей физические катушки, представленные матрицей S, в виртуальные катушки, соответствующие собственным модам E, выражаемым уравнением E=UH×S.
Вместо измерения отображений полей B1 отдельных катушек, можно также измерить их соответствующую суперпозицию, которая формирует собственные моды. Собственные моды можно классифицировать в соответствии с их вкладом в свойства системы катушек в целом, по сингулярным значениям, заданным в матрице Σ. Упомянутая классификация дает возможность исключения катушек с собственными модами, наименее важными в количественном отношении, без потери информационного содержимого, важного для отображения поля B1. Вместо этого измеряются только несколько собственных мод, которые дают наибольший вклад в отображение поля B1.
Исключение собственных мод, которые дают небольшой вклад в информацию, касающуюся отображения B1, можно реализовать математически посредством применения оператора R сокращения к системе в соответствии с выражением E'=R×UH×S, где E' означает сокращенную систему характеристических катушек. Оператор R аналогичен единичной матрице, но содержит нули в позициях собственных мод, подлежащих исключению при измерениях отображения поля B1. Следует понимать, что ограничение числа собственных мод, подлежащих измерению, является общим подходом и может применяться независимо от последовательности отображения поля B1, которая применяется для получения данных измерений. Отображение поля B1 может выполняться либо в двух, либо в трех измерениях. На основании предварительной априорной информации, относящейся к чувствительностям катушек набора радиочастотных передающих катушек 11, можно оценить линейные преобразования для получения собственных мод, которые дают наибольшую информацию для отображения поля B1, и, следовательно, решетку катушек можно рассматривать как катушку, состоящую из меньшего числа виртуальных элементов катушек.
По желанию, измерение выбранных собственных мод не выполняется напрямую. Данный подход предполагает, что последовательности отображения поля B1 могут содержать некоторую неточность. Например, отображение поля B1 может иметь большой динамический диапазон, содержащий пространственные области низких чувствительностей. Более высокочастотные собственные моды содержат меньше энергии сигнала и характеризуются большим числом упомянутых зон низкой чувствительности, что осложняет их измерение с достаточной точностью. Соответственно, в некоторых вариантах осуществления собственные моды кодируются суперпозицией мод, с использованием, например, принципа «все, кроме одной», по которому используются все физические катушки 11, кроме одной, чтобы повысить точность процедуры отображения поля B1. Если принять, что матрица A описывает суперпозицию отдельных собственных мод для формирования модифицированных мод Z катушек в соответствии с принципом «все, кроме одной», который применяется в ходе разных этапов отображения поля B1, то можно записать следующее выражение: Z=A×E'=A×R×UH×S. Произведение (A×R×UH) дает амплитуды и фазы для отдельных передающих элементов катушек из набора радиочастотных передающих катушек 11 для последовательностей отображения B1. Информация S относительно чувствительности катушек в крайнем правом выражении соответственно выводится из априорной информации относительно решетки передающих катушек 11.
После измерения соответствующее преобразование, выведенное из выражения Z=A×E'=A×R×UH×S, позволяет получить соответствующие представления чувствительностей 30 катушек для физического набора радиочастотных передающих катушек 11, которые, после этого, соответствующим образом применяются для шиммирования B1, или для определения параметров параллельно передаваемых радиочастотных импульсов. Удобно также решается задача разработки радиочастотных импульсов на основе поднабора собственных мод. Путем выполнения действий в пространстве собственных мод, суммарное время вычислений можно сократить по сравнению с вычислениями, выполняемыми в базисе физических катушек 11.
Знания, полученные из предыдущих калибровок чувствительностей катушек, выполненных в двух или трех измерениях, можно также использовать с помощью подходящей процедуры обучения. Например, в матрице S' может храниться матрица трехмерной чувствительности поля B1 для каждой физической катушки из набора катушек 11. Данная матрица служит усредненной моделью чувствительностей катушек, которую корректируют для получения амплитуд и фаз отдельных катушек на основании нового измерения отображения поля B1. Так как каждое новое измерение отображения поля B1 выполняется в двух или трех измерениях, сохраненная модель S' соответственно корректируется посредством включения вновь полученной информации, например, с использованием подходящей процедуры взвешенного усреднения. Данная процедура, по желанию, учитывает надежность существующей модели S' в разных местах пространства. Модель S' можно хранить в разных форматах, например, в системе физических координат (то есть, в базисе набора радиочастотных передающих катушек 11) или в базисе системы характеристических катушек. Последний способ хранения допускает разные степени точности сохраненных данных, в зависимости от числа собственных значений, которыми пренебрегают. Предполагается, что пользователь должен выбрать упомянутую степень точности. Хранение чувствительностей S' и корректировка сохраненных чувствительностей с каждой итерацией отображения поля B1 особенно полезны в случае неподвижно установленных передающих решеток, например, катушки для тела, в которой относительное пространственное расположение катушек в наборе радиочастотных катушек 11 предварительно задается общим корпусом или общей опорой.
Кроме того, в предпочтительном варианте исходя из соотношения Z=A×E'=A×R×UH×S можно оценить удельный коэффициент поглощения (SAR) для последовательностей отображения B1 посредством включения в информацию сохраненной информации, относящейся к чувствительностям катушек, заданной в сохраненной S'.
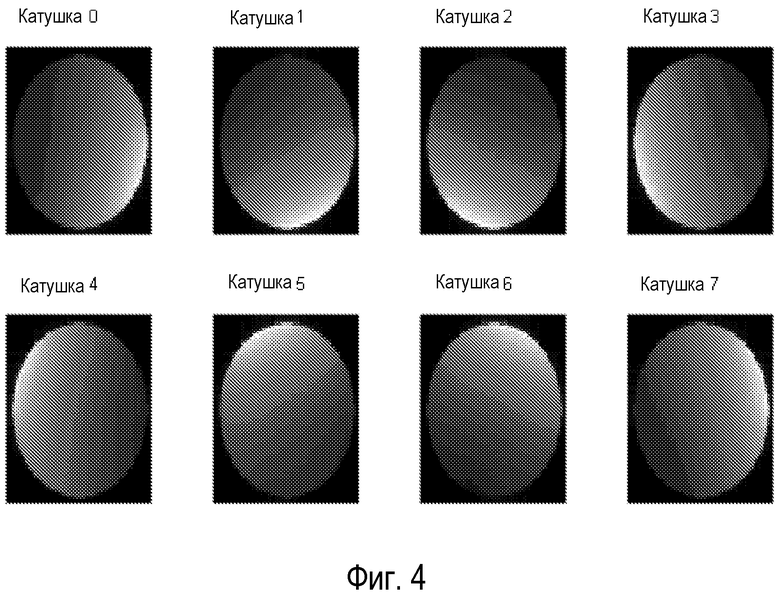
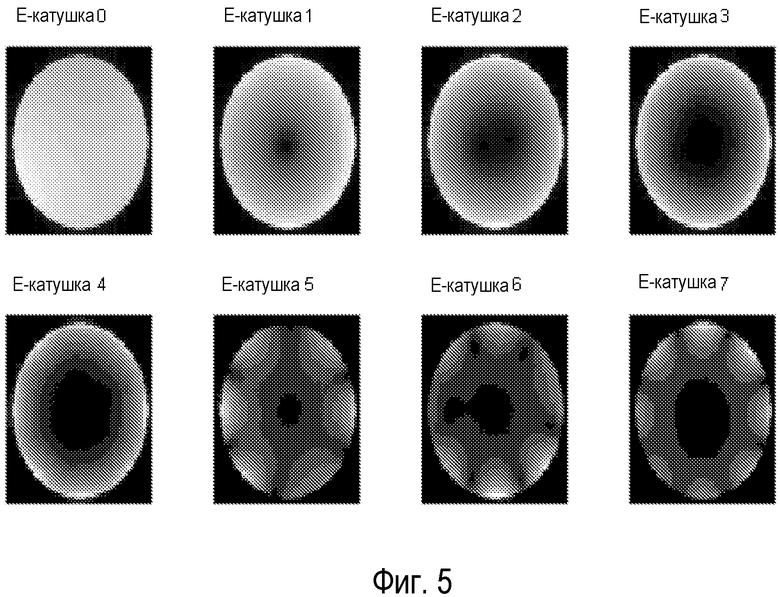
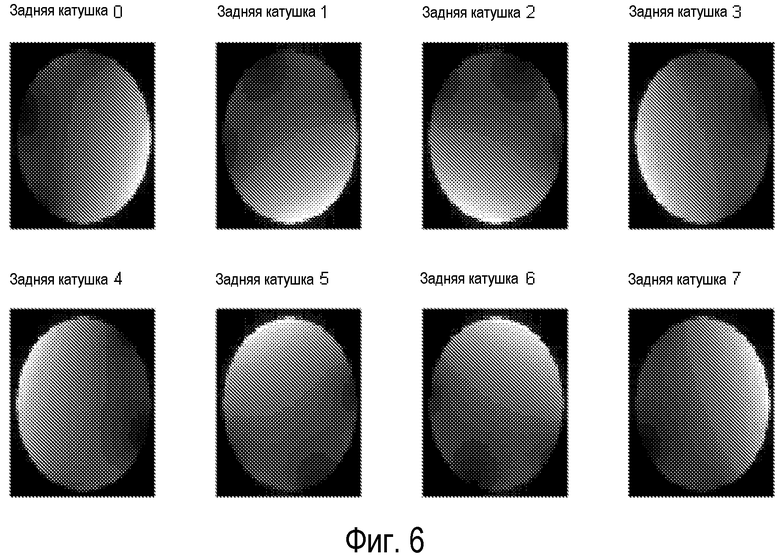
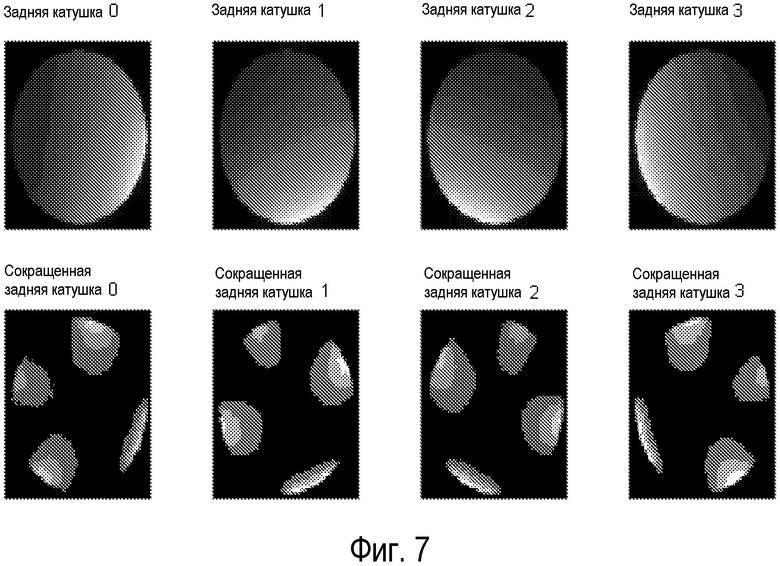
На фиг.4-7 представлены некоторые отображения поля B1 при вышеописанном отображении поля B1. Предполагаемым применением в данном случае является МР изображение тела, получаемое посредством двумерного сканирования при наклонной ориентации. Чтобы компенсировать изменение B1 при упомянутом формировании изображения, в предпочтительном варианте выполняют шиммирование B1. В данном случае предполагается, что передающая система является восьмиканальной (то есть в приведенном примере, N=8). На основании информации о геометрии слоя (FOV (область сканирования), ориентация слоя), 3-мерные подготовленные чувствительности катушек переформатируются из представления S', с использованием методов интерполяции и экстраполяции. Реформатированные чувствительности отдельных катушек анализируются с использованием соотношения E=UH×S. В данном примере, для отображения поля B1 применяются четыре собственных моды, что вдвое сокращает время отображения поля B1 для восьмикатушечной системы. Выбранная схема измерения основана на принципе «все, кроме одной». Соответствующая матрица A кодирования считается, для простоты, действительной. Все элементы матрицы A равны единице, но диагональные элементы установлены равными нулю для реализации схемы измерения «все, кроме одной». (Данный случай является всего лишь примерным, и предполагается возможность применения других матриц кодирования. Например, в других вариантах осуществления учитываются соответствующие собственные значения для разных собственных мод, чтобы выбирать оптимальные матрицы A кодирования для повышения точности процедуры отображения для всех подлежащих измерению мод). После выбора схемы кодирования рассчитываются уровни возбуждения в каналах для быстрого отображения поля B1, и выполняются измерения с требуемым пространственным разрешением. На основании четырех измеренных собственных мод рассчитываются чувствительности катушек и, следовательно, коэффициенты шиммирования B1. На фиг.4 представлены чувствительности катушек (отображения поля B1) для восьмикатушечной системы. На фиг.5 представлены собственные моды порядков 0-7. На фиг.6 представлены чувствительности катушек (отображения поля B1) для восьмикатушечной системы, вычисленные вышеописанным способом, по данным измерений только четырех собственных мод наименьшего порядка, кодированных с использованием системы кодирования по принципу «все, кроме одной». Сравнение фиг.4 и 6 показывает, что исключение четырех собственных мод наивысшего порядка относительно слабо влияет на полученные чувствительности катушек. И, наконец, верхний ряд на фиг.7 воспроизводит верхний ряд на фиг.6, однако, нижний ряд на фиг.7 демонстрирует различие между (i) чувствительностями катушек, полученными посредством исключения собственных мод более высокого порядка, и (ii) фактическими чувствительностями катушек, представленными на фиг.4. И вновь, наблюдается очень небольшое различие, за исключением областей вблизи внешних краев FOV (области сканирования).
Настоящее изобретение описано со ссылкой на предпочтительные варианты осуществления. Другими специалистами, после прочтения и изучения вышеприведенного подробного описания, могут быть предложены модификации и внесены изменения. Предполагается, что настоящее изобретение следует интерпретировать как содержащее все упомянутые модификации и изменения в той степени, насколько они находятся в пределах объема прилагаемой формулы изобретения или ее эквивалентов. Ни одну из позиций, приведенных в скобках в формуле изобретения, нельзя истолковывать в смысле ограничения изобретения. Выражение «содержащий» не исключает присутствия элементов или этапов, отличающихся от элементов или этапов, перечисленных в формуле изобретения. Единственное число, использованное при определении элемента, не исключает присутствия множества таких элементов. Предложенный способ можно реализовать с помощью аппаратных средств, содержащих несколько разных элементов, и с помощью соответственно запрограммированного компьютера. В пунктах формулы изобретения, заявляющих систему, с перечислением нескольких средств, несколько упомянутых средств могут быть реализованы с использованием одного и того же элемента машиночитаемого программного обеспечения или аппаратных средств. Тот факт, что некоторые характеристики упомянуты в различающихся между собой зависимых пунктах формулы изобретения не означает невозможности эффективного использования комбинации упомянутых характеристик.
| название | год | авторы | номер документа |
|---|---|---|---|
| УМЕНЬШЕНИЕ SAR В ПАРАЛЛЕЛЬНОЙ ПЕРЕДАЧЕ ПОСРЕДСТВОМ ЗАВИСИМОГО ОТ КАОННОГО ПРОСТРАНСТВА ВЫБОРА RF-ИМПУЛЬСОВ | 2010 |
|
RU2522179C2 |
| ЭМУЛЯЦИЯ ВИРТУАЛЬНЫХ КАТУШЕК В МРТ С ПАРАЛЛЕЛЬНОЙ ПЕРЕДАЧЕЙ | 2011 |
|
RU2582474C2 |
| ФОРМИРОВАНИЕ МАГНИТНО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ МНОГОТОЧЕЧНОГО СПОСОБА ДИКСОНА | 2011 |
|
RU2592039C2 |
| ДАКТИЛОСКОПИЯ МАГНИТНО-РЕЗОНАНСНОЙ СИСТЕМЫ | 2016 |
|
RU2683602C2 |
| ВЫБОР КАТУШЕК ДЛЯ ПАРАЛЛЕЛЬНОЙ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2009 |
|
RU2504795C2 |
| ПАССИВНОЕ ШИММИРОВАНИЕ ПОЛЯ В1 | 2011 |
|
RU2577172C2 |
| МАРШРУТИЗАТОР И МАТРИЦА КАТУШЕК ДЛЯ МРТ СО СВЕРХВЫСОКОЙ НАПРЯЖЕННОСТЬЮ ПОЛЯ | 2011 |
|
RU2562978C2 |
| МАГНИТНО-РЕЗОНАНСНАЯ (MR) ВИЗУАЛИЗАЦИЯ С В1-ОТОБРАЖЕНИЕМ | 2013 |
|
RU2611082C2 |
| УПРАВЛЯЕМАЯ ПОТОКОМ ДАННЫХ КОРРЕКЦИЯ ФАЗОЗАВИСИМЫХ АРТЕФАКТОВ В СИСТЕМЕ МАГНИТНО-РЕЗОНАНСНОЙ ТОМОГРАФИИ | 2018 |
|
RU2764643C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ МАГНИТНО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2626184C2 |
Изобретение относится к измерительной технике, представляет собой способ магнитно-резонансного формирования изображений и систему для его осуществления. При реализации способа с использованием набора радиочастотных передающих катушек выполняют некоторое число, меньше числа катушек в наборе, последовательностей отображения поля B1, получают набор данных отображения поля B1 и определяют чувствительности катушек в базисе полученного набора данных отображения поля B1, причем определенные чувствительности катушек используют для выполнения шиммирования B1. В некоторых вариантах осуществления выполняемые последовательности отображения поля B1 задаются посредством выполнения линейного преобразования по набору радиочастотных передающих катушек для формирования набора ортогональных виртуальных радиочастотных передающих катушек и выбора поднабора из набора ортогональных виртуальных радиочастотных передающих катушек, который задает выполняемые последовательности отображения поля B1. Техническим результатом является повышение степени однородности передаваемого поля B1 либо в незаполненном, либо в заполненном состоянии. 4 н. и 10 з.п. ф-лы, 7 ил.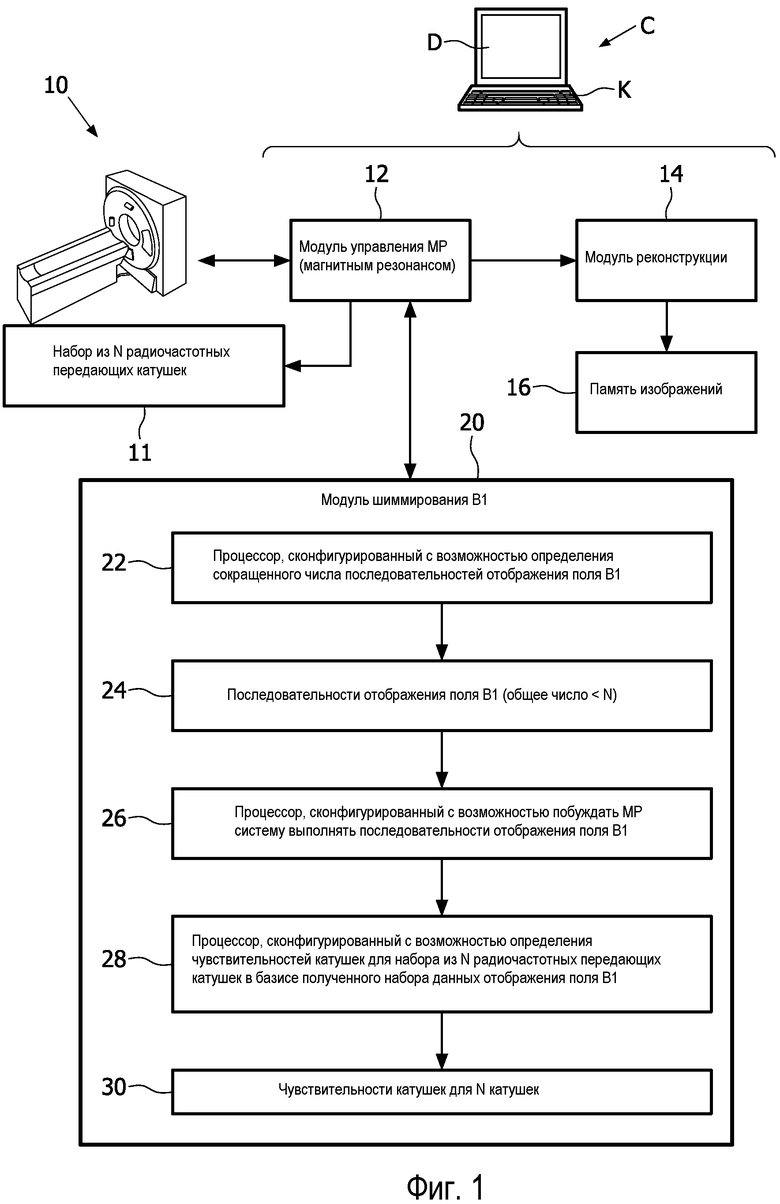
1. Способ магнитно-резонансного формирования изображений, содержащий этапы, на которых:
выполняют некоторое число последовательностей (24) отображения поля B1 с использованием набора радиочастотных передающих катушек (11) для получения набора данных отображения поля B1, при этом упомянутое число меньше, чем число радиочастотных передающих катушек в наборе радиочастотных передающих катушек; и
определяют чувствительности (30) катушек для набора радиочастотных передающих катушек в базисе полученного набора данных отображения поля B1, причем определенные чувствительности катушек используют для выполнения шиммирования B1.
2 Способ по п.1, в котором выполняемые последовательности (24) отображения поля B1 задаются посредством (i) выполнения линейного преобразования (40) по набору радиочастотных передающих катушек (11) для формирования набора ортогональных виртуальных радиочастотных передающих катушек (42) и (ii) выбора (44) поднабора (46) из набора ортогональных виртуальных радиочастотных передающих катушек, которые задают выполняемые последовательности отображения поля B1.
3. Способ по п.2, в котором линейное преобразование (40) является преобразованием собственных мод.
4. Способ по п.3, в котором операция (ii) (44) выбора содержит этап, на котором выбирают множество виртуальных радиочастотных передающих катушек, имеющих наименьшие порядки собственных мод из набора ортогональных виртуальных радиочастотных передающих катушек (42).
5. Способ по п.2, в котором выполняемые последовательности (24) отображения поля B1 дополнительно задаются посредством (iii) кодирования (50, 52) катушки из выбранного поднабора (46) с использованием набора радиочастотных передающих катушек (11) в качестве базиса кодирования для определения соответствующих значений (54) амплитуд и фаз для радиочастотных передающих катушек из набора радиочастотных передающих катушек (11).
6. Способ по п.2, в котором операция (ii) (44) выбора содержит исключение из выбранного поднабора (46) таких виртуальных радиочастотных передающих катушек, которые формируют передаваемое поле B1 с преимущественно высоким пространственно-частотным содержимым.
7. Способ по п.2, в котором этап определения чувствительностей (30) катушек содержит применение обратного преобразования (64), соответствующего линейному преобразованию (40), к полученному набору (62) данных отображения поля B1 для формирования полученного набора (66) данных отображения поля B1 в базисе набора радиочастотных передающих катушек (11).
8. Способ по п.1, в котором выполняемое число последовательностей (24) отображения поля B1 меньше или равно одной второй от числа радиочастотных передающих катушек в наборе радиочастотных передающих катушек (11).
9. Способ по п.1, в котором каждую последовательность отображения поля B1 выполняют с использованием всех, кроме одной, из радиочастотных передающих катушек в наборе радиочастотных передающих катушек (11).
10. Способ по п.9, в котором каждая выполняемая последовательность отображения поля B1 исключает одну другую катушку из радиочастотных передающих катушек в наборе радиочастотных передающих катушек (11).
11. Способ по п.1, в котором определение чувствительностей (30) катушек для набора радиочастотных передающих катушек (11) в базисе полученного набора данных отображения поля B1 содержит этап, на котором корректируют сохраненный набор чувствительностей катушек для набора радиочастотных передающих катушек в базисе полученного набора данных отображения поля B1.
12. Носитель данных, содержащий команды, исполняемые цифровым процессором для выполнения способа по п.1.
13. Цифровой процессор, сконфигурированный с возможностью выполнения способа по п.1.
14. Магнитно-резонансная система, содержащая:
магнитно-резонансный сканер (10);
набор радиочастотных передающих катушек (11) и
цифровой процессор, сконфигурированный с возможностью выполнения способа по п.1, при этом этап выполнения некоторого числа последовательностей (24) отображения поля B1 содержит побуждение магнитно-резонансного сканера выполнять упомянутые последовательности отображения поля B1 с использованием упомянутого набора радиочастотных передающих катушек.
| M | |||
| Buehrer et al | |||
| "Array Compression for MRI with Large Coil Arrays" | |||
| Magnetic Resonance in Medicine, vol | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
| ПИШУЩАЯ МАШИНА ДЛЯ ПОЛУЧЕНИЯ РАВНОГЛУБОКИХ ОТТИСКОВ ЛИТЕР | 1923 |
|
SU1131A1 |
| US 20070255128 A1, 01.11.2007 | |||
| US 20070170917 A1, 26.07.2007 | |||
| US 6294972 B1, 25.09.2001 | |||

