ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к способу выбора набора катушечных элементов из множества физических катушечных элементов, содержащихся в комплекте катушек для выполнения магнитно-резонансного сканирования, компьютерному программному продукту и системе магнитно-резонансной визуализации.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Параллельная визуализация с использованием комплектов катушек с большим числом независимых катушечных элементов обеспечивает повышенную эффективность визуализации и повышенное отношение сигнала к шуму (SNR). В настоящее время имеет место фундаментальная тенденция к значительному увеличению числа катушечных элементов, используемых для приема. Совсем недавно предложены 32-элементные катушки для повышения SNR (отношения сигнала к шуму) и обеспечения более высоких коэффициентов приведения (Niendorf T., Hardy C.J., Giaquinto R.O., Gross P., Cline H.E., Zhu Y., Kenwood G., Cohen S., Grant A.K., Joshi S., Rofsky N.M., Sodickson D.K. (2006) Toward single breath-hold whole-heart coverage coronary MRA using highly accelerated parallel imaging with a 32-channel MR system. Magn Reson Med 56: 167-176).
Предлагались и были реализованы еще более сложные комплекты катушек, состоящие из отдельных элементов числом до 128. Однако такое число комплектов катушек использовалось в системах, поддерживающих только 32 приемных канала. Использование большого числа катушечных элементов комплекта может приводить к проблемам с запоминающими устройствами и к увеличению времени реконструкции. Для преодоления упомянутых проблем можно применять методы предварительной обработки данных.
Упомянутые методы можно реализовать посредством линейного комбинирования исходных данных катушек перед приемом, с использованием соответствующего аппаратного объединителя, сжатия данных выборки данных перед реконструкцией или посредством отбраковки конкретных данных от катушечных элементов с малым информационным наполнением сигнала (либо до, либо после приема).
В документе US 7279893 предлагается технология реконструкции изображений, на которой определяют линейные комбинации информации приемных каналов, которая дает наибольший вклад в SNR изображения для уменьшения затрат вычислительных ресурсов, налагаемых на реконструирующую машину системы MRI (магнитно-резонансной визуализации), и на которой количественно определяют потери на SNR для сокращенного набора приемных каналов для реконструкции изображения.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание усовершенствованного способа выбора набора катушечных элементов из множества физических катушечных элементов, содержащихся в комплекте катушек, для выполнения магнитно-резонансного сканирования для формирования изображения, усовершенствованного компьютерного программного продукта и усовершенствованной системы магнитно-резонансной визуализации.
Настоящее изобретение предлагает способ выбора набора катушечных элементов из множества физических катушечных элементов, содержащихся в комплекте катушек, для выполнения магнитно-резонансного сканирования для формирования изображения, оптимизированного для интересуемой области, при этом способ содержит этапы, на которых определяют матрицу чувствительности катушек множества физических катушечных элементов для интересуемой области и определяют матрицу проекций, причем матрица проекций проецирует матрицу чувствительности множества физических катушечных элементов на набор виртуальных катушечных элементов. Затем из матрицы проекций определяют вклад каждого физического катушечного элемента из множества физических катушечных элементов в набор виртуальных катушечных элементов. Затем, на основании вклада, физические катушечные элементы с наиболее значимым вкладом выбирают в качестве набора катушечных элементов.
Способ в соответствии с изобретением обладает преимуществом в том, что, в принципе, рассматриваются все возможные поднаборы комбинаций катушечных элементов для выбора наиболее подходящего набора катушечных элементов для выполнения магнитно-резонансного сканирования интересуемой области для формирования изображения. Полный поиск по всем возможным поднаборам не требуется, так как выполняется способ реконструкции типа SENSE (с кодированием чувствительности), с осуществлением выборки k-пространства в прямоугольных координатах, и способ матрицы проекций выдает рекомендацию по оптимальному набору катушек для использования, что не требует поиска наиболее подходящего набора катушечных элементов по каждому катушечному элементу.
Способ в соответствии с изобретением обеспечивает автоматический выбор катушек, т.е. выбор только важных катушек для осуществления выборки сигнала, что снижает нагрузку на память и реконструкцию. Алгоритм, положенный в основу способа, обеспечивает автоматический выбор соответствующих катушек, без какого-либо взаимодействия с пользователем, что облегчает оптимальный выбор для визуализации типа SENSE. Алгоритм важен для оптимизации последовательности выполняемых действий и применим уже в фазе планирования сканирования при автоматическом выборе наилучшего катушечного элемента. Кроме того, алгоритм можно использовать во время интерактивного сканирования в реальном времени для учета изменений условий сканирования и поддержания максимальной эффективности системы путем оптимального выбора катушек в реальном времени.
В соответствии с одним вариантом осуществления изобретения определяют матрицу проекций посредством факторизации матрицы чувствительности катушек. В предпочтительном варианте факторизация выполняется методом сингулярного разложения (SVD). SVD дает преимущество в том, что матрицу можно быстро факторизовать именно таким способом, при котором один из коэффициентов соответствует матрице, из которой можно математически получить матрицу проекций, при небольшом объеме вычислений.
В соответствии с одним вариантом осуществления изобретения вклад физического катушечного элемента определяют вычислением суммы всех величин элементов матрицы проекций, получающих вклад от физического катушечного элемента. Данный подход дает преимущество в том, что, вместо рассмотрения воздействия отдельного физического катушечного элемента на принимаемый сигнал, рассматривается суммарный эффект, который получается в результате совместного воздействия всех физических катушечных элементов. Комбинаторное воздействие всех физических катушечных элементов, вносящих вклад в локальный сигнал, соответствует реальному случаю, когда сбор данных выполняют с использованием многокатушечных методов.
В соответствии с одним вариантом осуществления изобретения вклад физического катушечного элемента является усредненным вкладом физического катушечного элемента во все воксели в интересуемой области.
В соответствии с дополнительным вариантом осуществления изобретения способ дополнительно содержит этап, на котором определяют матрицу корреляции шума множества физических катушечных элементов, при этом матрицу проекций определяют на основе матрицы чувствительности катушек и матрицы корреляции шума.
Альтернативно, в дополнительном варианте осуществления изобретения способ дополнительно содержит этап, на котором определяют дополнительные вклады каждого физического катушечного элемента из множества физических катушечных элементов в набор виртуальных катушечных элементов, с использованием матрицы корреляции шума, при этом выбор физических катушечных элементов с наиболее значимым вкладом в качестве набора катушечных элементов дополнительно содержит умножение на весовой коэффициент вклада каждого физического катушечного элемента в соответствии с дополнительными вкладами, полученными на основе матрицы корреляции шума.
Дополнительное включение матрицы корреляции шума в процедуру определения набора катушек, который следует выбрать, дает преимущество в том, что учитываются связи между катушечными элементами. Такой подход дополнительно повышает точность способа в соответствии с изобретением и, тем самым, более точно отражает физические условия в реальной системе MRI.
В соответствии с одним вариантом осуществления изобретения дополнительные вклады, получаемые из матрицы корреляции шума, вычисляют с помощью дополнительной матрицы проекций, при этом дополнительную матрицу проекций определяют факторизацией матрицы корреляции шума. При этом получают такое же преимущество, которое уже описано выше в отношении матрицы чувствительности катушек, а именно, быстрый выбор катушек с низкими затратами вычислительных ресурсов и высокую точность.
В соответствии с дополнительным вариантом осуществления изобретения матрица чувствительности катушек является матрицей чувствительности приемных катушек или матрицей чувствительности передающих катушек. Другими словами, способ в соответствии с настоящим изобретением применим с целью передачи, а также приема. В обоих случаях наиболее подходящий набор катушек из множества передающих или приемных катушек можно использовать для возбуждения и/или перефокусировки намагниченности или для сбора данных из интересуемой области. Таким образом, идею использования параллельной визуализации для сокращения продолжительности сбора данных посредством одновременного использования нескольких приемных катушек можно адаптировать для параллельной передачи пространственно селективных многомерных РЧ (радиочастотных) импульсов с использованием только соответствующих передающих катушек в ходе данного эксперимента. Тем самым можно реализовать оптимальную передачу при ограниченном наборе передатчиков и/или РЧ усилителей или можно снизить размерность задачи планирования РЧ импульса посредством пропуска вычисления РЧ импульса для передающих элементов, которые не вносят существенного вклада в окончательный результат. Последний можно получить за более короткое время вычислений благодаря снижению степени сложности задачи.
В соответствии с другим аспектом изобретение относится к компьютерному программному продукту, содержащему машиноисполняемые команды для выполнения способа в соответствии с изобретением.
В соответствии с другим аспектом изобретение относится к системе магнитно-резонансной визуализации, содержащей комплект катушек, предназначенных для выполнения магнитно-резонансного сканирования интересуемой области, причем комплект катушек содержит множество физических катушечных элементов, при этом система содержит средство для определения матрицы чувствительности катушек множества физических катушечных элементов для интересуемой области, средство для определения матрицы проекций, причем матрица проекций проецирует матрицу чувствительности множества физических катушечных элементов на набор виртуальных катушечных элементов, средство для определения, на основе матрицы проекций, вклада каждого физического катушечного элемента из множества физических катушечных элементов в набор виртуальных катушечных элементов и средство для выбора, на основании вклада, физических катушечных элементов с наиболее значимым вкладом в качестве набора катушечных элементов, применимого для выполнения магнитно-резонансного сканирования интересуемой области.
В соответствии с одним вариантом осуществления изобретения магнитно-резонансное сканирование дополнительно содержит средство для факторизации матрицы чувствительности катушек, например, методом сингулярного разложения. Дополнительно, в предпочтительном варианте осуществления изобретения система магнитно-резонансной визуализации дополнительно содержит средство для определения матрицы корреляции шума множества физических катушечных элементов, при этом средство для определения матрицы проекций выполнено с возможностью определения матрицы проекций из матрицы чувствительности катушек и матрицы корреляции шума.
В соответствии с одним вариантом осуществления изобретения система магнитно-резонансной визуализации дополнительно содержит средство для определения дополнительных вкладов для каждого физического катушечного элемента из множества физических катушечных элементов в набор виртуальных катушечных элементов, с использованием матрицы корреляции шума.
В соответствии с другим аспектом изобретение относится к способу выбора набора катушечных элементов из множества физических катушечных элементов, содержащихся в комплекте катушек, для выполнения магнитно-резонансного сканирования интересуемой области, при этом каждый физический катушечный элемент набора катушечных элементов обладает чувствительностью катушки, причем способ содержит этап, на котором определяют первое оцениваемое информационное наполнение для изображения, получаемого в результате магнитно-резонансного сканирования интересуемой области, причем определение данного изображения выполняют комбинированием чувствительностей катушек первого набора физических катушечных элементов. Способ дополнительно содержит этап, на котором определяют второе оцениваемое информационное наполнение для изображения, получаемого в результате магнитно-резонансного сканирования интересуемой области, причем определение выполняют комбинированием чувствительностей катушек второго набора физических катушечных элементов, причем во втором наборе физических катушечных элементов пропускают, по меньшей мере, одну катушку, по сравнению с первым набором физических катушечных элементов. Дополнительно, вычисляют потерю информации в результате пропуска, по меньшей мере, одной катушки путем сравнения первого и второго информационных наполнений. И, наконец, повторяют предыдущие этапы и определяют набор катушечных элементов, который дает минимальную потерю информации.
Под «информационным наполнением» можно понимать число битов, необходимых для представления соответствующей информации изображения. Точнее, в настоящем случае «информационным наполнением» МР (магнитно-резонансного) изображения считается сумма информационных наполнений (или «полное количество информации») каждого пикселя. В контексте настоящей заявки «полное количество информации» является мерой количества информации, которую можно получить о ткани в данной локализации объекта, посредством наблюдения его зашумленной реконструкции. Упомянутое полное количество информации можно выразить в виде
I(X; Y)=H(X)-H(X│Y),
где: I означает полное количество информации; H означает энтропию, X означает истинное состояние ткани (в контексте настоящего изобретения: сигнал, свободный от шума); и Y означает реконструированный сигнал с шумами. По существу, H(X) означает энтропию сигнала, и H(X│Y) означает энтропию шума.
В соответствии с другим аспектом изобретение относится к компьютерному программному продукту, содержащему машиноисполняемые команды для выполнения способа выбора набора катушечных элементов на основании вышеописанного анализа информационного наполнения.
В соответствии с еще одним аспектом изобретение относится к системе магнитно-резонансной визуализации, при этом система содержит комплект катушек, предназначенных для выполнения магнитно-резонансного сканирования интересуемой области, при этом комплект катушек содержит множество физических катушечных элементов, причем система содержит средство для определения первого оцениваемого информационного наполнения для изображения, получаемого в результате магнитно-резонансного сканирования интересуемой области, причем определение выполняют комбинированием чувствительностей катушек первого набора физических катушечных элементов. Система дополнительно содержит средство для определения второго оцениваемого информационного наполнения для изображения, получаемого в результате магнитно-резонансного сканирования интересуемой области, причем определение выполняют комбинированием чувствительностей катушек второго набора физических катушечных элементов, причем во втором наборе физических катушечных элементов пропущена, по меньшей мере, одна катушка, по сравнению с первым набором физических катушечных элементов. Кроме того, система дополнительно содержит средство для вычисления потери информации в результате пропуска, по меньшей мере, одной катушки путем сравнения первого и второго информационных наполнений и средство для повторения упомянутых этапов и определения набора катушечных элементов, дающего минимальную потерю информации.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения со ссылками на сопроводительные чертежи, на которых:
фиг.1 изображает схематически систему MRI в соответствии с изобретением;
фиг.2 - блок-схему последовательности операций способа выбора набора катушечных элементов из множества физических катушечных элементов, содержащихся в комплекте катушек, для выполнения магнитно-резонансного сканирования интересуемой области;
фиг.3 - дополнительную блок-схему последовательности операций способа выбора набора катушечных элементов из множества физических катушечных элементов;
фиг.4 - сравнение алгоритмов выбора катушек на основе SVD (сингулярного разложения) и SNR (отношения сигнал/шум).
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ ИЗОБРЕТЕНИЯ
На фиг.1 представлено схематическое изображение системы MRI в соответствии с изобретением. На фиг.1 показаны только основные компоненты предпочтительной системы MRI, которые заключают в себе настоящее изобретение. Устройство магнитно-резонансной визуализации содержит систему 100 обработки данных, при этом система 100 обработки данных обычно содержит компьютерный экран 102 и устройство 104 ввода. Данное устройство ввода может быть, например, клавиатурой или мышью.
Система MRI, показанная на фиг.1, дополнительно содержит память 106 и интерфейс 108. Интерфейс 108 предназначен для связи и обмена данными с характерными аппаратными компонентами MRI.
Характерными аппаратными компонентами MRI являются, например, магнит 122, который формирует основное магнитное поле для выполнения магнитно-резонансного сканирования объекта 120, например, человека. Дополнительно, градиентные катушки 124 работают под управлением системы 100 обработки данных, при этом градиентные катушки необходимы и применяются для выполнения сбора 3-мерных данных. Градиентные катушки 124 являются, предпочтительно, градиентными катушками, обладающими эффектом самоэкранирования, для создания градиентов по трем осям x, y и z.
Объект или человек 120 расположен на столе 118 с возможностью перемещения относительно набора РЧ катушек 130. Набор РЧ катушек 130 соединен с блоком 126 управления, который выполнен с возможностью выбора поднабора катушек 130 из множества катушек, показанных на фиг.1, и их назначения ограниченному числу РЧ каналов. Например, система MRI, показанная на фиг.1, может содержать набор только из четырех каналов приема МР сигналов, расположенных в приемном/передающем блоке 132, при этом в наличии имеется, в совокупности, восемь приемных катушек 130. Таким образом, требуется производить выбор катушечных элементов, что называется снижением размерности, при котором выбирается оптимальный поднабор физических катушек для реконструкции изображения.
Выбор выполняется системой 100 обработки данных, которая дополнительно содержит процессор, который выполнен с возможностью исполнения машиноисполняемых команд компьютерного программного продукта 112. В настоящем изобретении система 100 обработки данных содержит компьютерный программный продукт 112, который, при посредстве модуля 114 сбора данных, выполнен с возможностью управления аппаратными блоками 122, 124, 126 и 132. Перемещение стола 118 также может осуществляться под управлением модуля 114 сбора данных. Кроме того, компьютерный программный продукт 112 содержит модуль 116 выбора катушек. На основании информации, получаемой, например, во время процедуры предварительного сканирования из набора катушек 130, модуль 116 выбора катушек выполняет выбор физических катушек, которые следует использовать для выполнения сбора данных интересуемой области 128.
Как можно наглядно видеть в примере, приведенном на фиг.1, благодаря относительному расположению интересуемой области 128 и набора катушек 130, для сбора данных достаточно будет выбрать поднабор только таких катушек 130, которые расположены в непосредственной близости от интересуемой области 128. Данный предварительный выбор уже можно выполнять без анализа каких-либо принятых сигналов от катушек 130 простым сравнением четко известных пространственных позиций катушек 130 относительно фактического расположения стола 118. Если, например, требуется выполнить исследование головы человека, то система 100 обработки данных всегда знает, что, в примере, приведенном на фиг.1, потребуется только крайний правый набор катушек для выполнения соответствующего МР сканирования. Посредством предварительного выбора набора катушек возможно уменьшение затрат вычислительных ресурсов на вычисление соответствующего набора катушек для выполнения МР сканирования интересуемой области, так как для вычислительной процедуры не обязательно учитывать все катушки.
Аналогичную процедуру можно выполнять также для выбора ограниченного числа каналов для передачи. По аналогии, система 100 обработки данных и соответствующее программное обеспечение выбирает соответствующие передающие катушки, которые возбуждаются передающим блоком 132, который содержит в схеме соответствующие РЧ усилители.
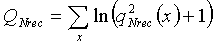
Как показано на фиг.2, для выбора набора катушечных элементов для выполнения МР сканирования интересуемой области выполняют этапы, показанные на фиг.2. На этапе 200 выполняют предварительное сканирование, за которым следует этап 202, на котором формируют матрицу чувствительности катушек множества физических катушечных элементов по данным предварительного сканирования. Посредством выполнения сингулярного разложения на этапе 204 определяют матрицу проекций, при этом матрица проекций проецирует матрицу чувствительности множества физических катушечных элементов на набор виртуальных катушечных элементов. За данным этапом следует этап 206, на котором, на основе матрицы проекций, определяют вклад каждого физического катушечного элемента из множества физических катушечных элементов в набор виртуальных катушечных элементов. На этапе 208 по вкладу выбирают физические катушечные элементы с наиболее значимым вкладом в качестве набора катушечных элементов, который используют на этапе 210 для выполнения основного магнитно-резонансного сканирования.
Для получения более точных результатов можно учитывать матрицу корреляции шума, которую также можно получить путем выполнения предварительного сканирования на этапе 200. В одном альтернативном варианте осуществления на этапе 212 формируют матрицу корреляции шума после выполнения этапа 200 предварительного сканирования. Затем, матрицу корреляции шума, сформированную на этапе 212, используют на этапе 204 для выполнения сингулярного разложения матрицы чувствительности катушек и матрицы корреляции шума, чтобы определить матрицу проекций.
Далее приведено более подробное теоретическое обоснование выбора катушек на основе сингулярного разложения:
Реконструкция типа SENSE по данным в декартовых координатах с равномерной недостаточной выборкой заключается в решении линейной системы L уравнений с R переменными, где L означает число катушечных элементов, и R означает коэффициент приведения. R неизвестных можно однозначно определить, если они измерены на основе R ортогональных катушек. Решение данной системы уравнений можно представить как проецирование задачи из L-мерного в R-мерное пространство и последующего ее решения в пространстве с меньшей размерностью.
Далее рассматривается задача реконструкции типа SENSE, с выборкой декартова k-пространства с коэффициентом приведения R в произвольном направлении [3], при использовании L-элементного комплекта катушек. Задача реконструкции в каждом пикселе выражается в виде:
a=Sb+n.
Вектор a состоит из комплексных интенсивностей пикселей в приведенном поле зрения (FOV) для каждой катушки, S является матрицей чувствительности L×R, b означает вектор, содержащий исходные пиксели изображения, которые перекрываются в побочных изображениях, и n является вектором шума. Реконструкция заключается в решении линейной системы уравнений (1) для каждого побочного пикселя в приведенном FOV. Данная система переопределена, поэтому для нахождения решения следует использовать метод оценки. В предположении гауссовой статистики для шума, наилучшая линейная оценка без смещения для вектора b имеет вид:
b=(SHψ-1S)-1SHψ-1a,
где: Ψ означает ковариационную матрицу L×L шумов приемников, которая помогает оптимизировать SNR во время реконструкции. Ковариационную матрицу шумов можно заменить единичной матрицей, что приводит к оценке по методу наименьших квадратов для b. В данном случае развертка, все-таки, обеспечивается, хотя и за счет снижения SNR, которое будет тем более значительным, чем менее равнозначны приемники по нагрузкам, коэффициентам усиления и взаимной связи.
В альтернативном варианте можно использовать методы факторизации матрицы для решения линейной задачи методом наименьших квадратов численно устойчивым способом. Наиболее распространенным методом факторизации матрицы, применяемым для решения переопределенной системы линейных уравнений, является сингулярное разложение (SVD).
С использованием SVD матрицу S чувствительности можно факторизовать в виде S=U∑VH, и решением методом SVD уравнения (1) задается выражением:
b=V∑+UHa,
где ∑+ означает транспонирование ∑ с каждым значением выше, чем предварительно заданный порог, с заменой на ее обратную матрицу.
Уравнение (3) можно записать в форме:
UHa=UHSb=∑VHb,
учитывающей только строки UH, ∑ и V, соответствующие сингулярным значениям, большим, чем порог. Матрица UH проецирует как данные, так и матрицу чувствительности в пространство меньшей размерности, соответствующее рангу матрицы S. Далее данную проекцию матрицы чувствительности катушек обозначают S', соответствующую проекцию вектора данных обозначают a0 и матрицу проекций, которая преобразует S в S', обозначают P, где P=UH.
a'=UHa=Pa
S'=UHS=PS.
Строки новой матрицы S' чувствительности катушек можно считать чувствительностями набора виртуальных катушек, при этом векторы чувствительностей получают в виде суперпозиции чувствительностей реальных физических катушек. Катушки можно классифицировать по их относительному вкладу в виртуальные катушки. Вектор i-той строки матрицы S' можно переписать в виде линейной комбинации строк матрицы S
где весовые коэффициенты P(i, k)=pik(k=1,..., nc) являются элементами i-той строки матрицы P. Величина pik отражает вклад k-той физической катушки в i-тую виртуальную катушку. При этом элементы комплекта катушек можно классифицировать в зависимости от весовой функции:
Весовую функцию можно вычислять для каждого реконструируемого пикселя в изображении полного FOV (поля зрения) или для данной интересуемой области, и оптимальный набор катушек выбирают в зависимости от суммарного весового коэффициента для данной области.
При этом одноэтапный выбор катушек выполняют с использованием сингулярного разложения матрицы чувствительности.
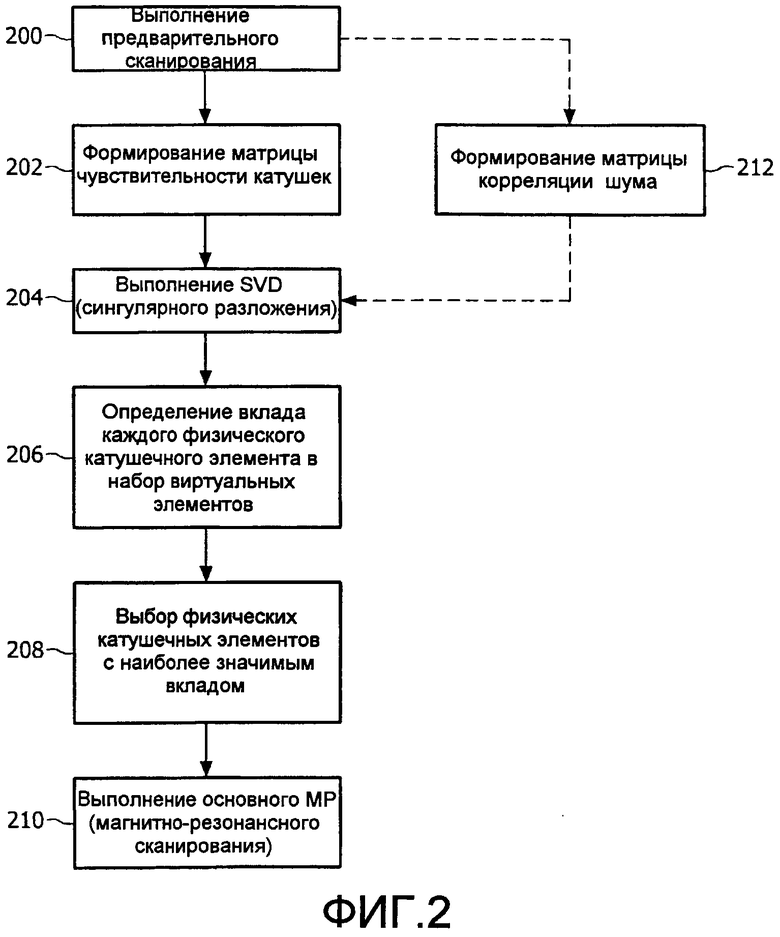
На фиг.3 приведена дополнительная блок-схема операций дополнительного способа выбора набора катушечных элементов из множества физических катушечных элементов, содержащихся в комплекте катушек, для выполнения магнитно-резонансного сканирования. Данный способ начинается с этапа 300, на котором выполняют предварительное сканирование для получения данных для формирования матрицы чувствительности к шуму на этапе 302. По матрице чувствительности к шуму на этапе 304 можно вычислить «информационное наполнение» для N катушек. За данным этапом следует этап 306, на котором информационное наполнение вычисляют для N-1 катушек. Разность между вычисленным информационным наполнением для N катушек и вычисленным информационным наполнением для N-1 катушек является потерей информации, которая имеет место при отбраковывании одной катушки. Данную потерю информации вычисляют на этапе 308. Этапы 304-308 повторяют, пока на этапе 310 не принимается решение, что потеря информации вычислена для всех возможных комбинаций катушек и пропущенных катушек. В случае, если на этапе 310 были рассмотрены все катушки, на этапе 312 отбраковывается катушка с минимальной потерей информации.
На этапе 314 проверяют, приводит ли отбраковывание катушки к числу физических катушек, которое соответствует предварительно заданному числу M катушек, которые желательно использовать для выполнения окончательного МР сканирования. Если на этапе 314 остается еще слишком много катушек, т.е. N-1>M, то на этапе 318 вычисляют N=N-1, с последующим повторением этапов 304-314. Каждый из циклов уменьшает число катушечных элементов на 1, пока на этапе 314 число элементов не сокращается до M. Затем, на этапе 316 выполняют МР сканирование с этим числом физических катушечных элементов, при этом другие катушечные элементы отбраковывают благодаря минимальной потере информации, связанной с отбрасыванием этих катушечных элементов.
Далее приведено более подробное описание способа выбора катушечных элементов:
Допустим, имеется Nacq каналов сбора данных (катушечных элементов), которые требуется сократить до Nrec элементов вследствие ограничений характеристик реконструкции и/или памяти. Такое сокращение с Nacq до Nrec элементов можно организовать посредством выполнения высокоскоростного канального комбинирования (предварительного комбинирования) профилей во временной области или посредством пропуска каналов.
Для определения оптимального сокращения числа каналов сначала следует оценить расчетное SNR для каждого канала, которое далее обозначено как pi(x). В данном случае x является вектором в 3-мерном объеме сканирования. Упомянутое pi можно оценить на основе подготовительного сканирования для анализа катушек. Данное сканирование выполняют по такой же геометрической схеме, как фактическое сканирование, с крупными вокселями (около 20 мм) и временем сканирования около 1 секунды. Упомянутое сканирование для анализа катушек можно использовать, чтобы получить грубую оценку пространственного распределения SNR. Такие неточные распределения SNR для каждой катушки i (pci(x)) нормируют в соответствии с выражением:
Суммирование по x является суммированием по всем вокселям в ходе сканирования для анализа катушек. «Усредненное SNR» различается для каждого протокола сканирования, FSNR(scan). Усредненное SNR можно определять для каждого сканирования, или можно считать достаточным постоянное значение 50. Тогда, ожидаемое SNR pi(x) для каждого катушечного элемента i равно

После комбинирования всех каналов оценка SNR полученного изображения выражается в виде
Для определения каналов, которые следует выбирать для предварительного комбинирования и пропуска, в качестве критерия можно выбрать максимум SNRNrec. Однако целесообразнее максимально увеличивать «информационное наполнение». В настоящем изобретении используется критерий «информационного наполнения», в соответствии с которым максимально увеличивают QNrec.
Сокращение числа элементов до Nrec можно выполнять множеством методов. Оптимальным способом было бы вычисление QNrec для каждого возможного метода с целью сокращения числа каналов до Nrec. Но такой способ требует слишком большой вычислительной мощности.
Решение данной проблемы получают сокращением числа каналов посредством пропускания канала i. Тогда качество снижается на

Затем комбинируют каналы или пропускают канал так, что это приводит к минимальной потере информации. Как несложно понять, данный процесс можно повторять до тех пор, пока число элементов не сокращается до Nrec.
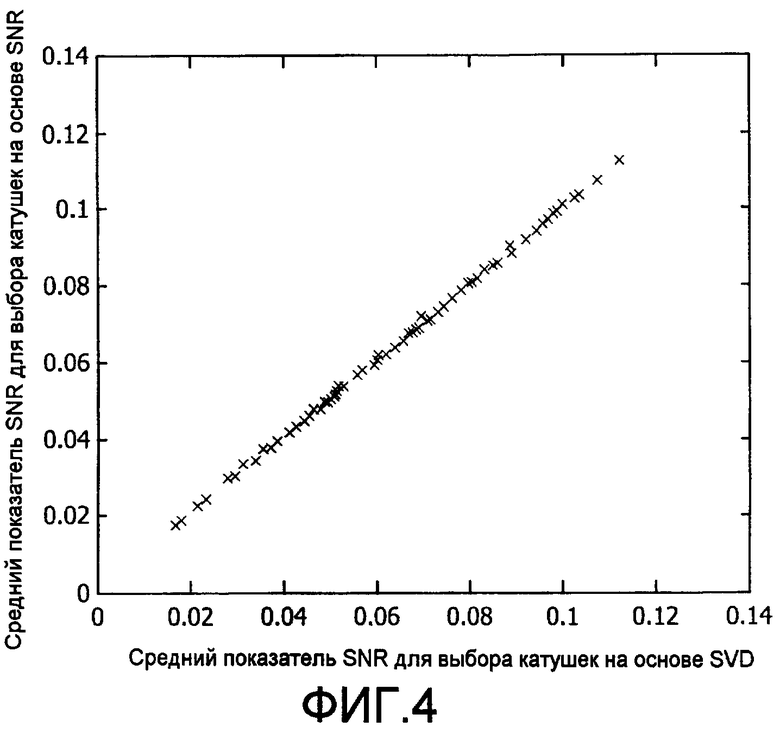
На фиг.4 показано сравнение алгоритмов выбора катушек на основе SVD и SNR. Алгоритм выбора катушек на основе SNR представляет собой алгоритм, который учитывает отношения сигнала к шуму, получаемые при комбинировании катушек по отдельным катушкам. Данный алгоритм невыгоден из-за медленной работы, так как требует отдельного анализа всех видов комбинаций катушечных элементов.
На фиг.4 изображена диаграмма рассеяния среднего показателя SNR для пикселей, которые применялись при выборе катушек. Средний показатель SNR характеризуется очень высокой степенью корреляции между двумя алгоритмами для 100 смоделированных наборов данных. Для моделирования использовали 100 разных наборов компьютерносозданных карт отображений чувствительностей катушек, при этом каждый набор состоял из 32 катушечных элементов. Элементы комплекта катушек моделировались как круглые катушки с 40-мм радиусом. Положения катушечных элементов выбирали случайным образом в зоне, ограниченной двумя коаксиальными цилиндрами, а их ориентацию выбирали по касательной к цилиндрам. С помощью данного метода моделировали простые намотанные по кругу катушки.
Карты отображения чувствительности вычислялись с использованием закона Био-Савара для матрицы с 384×384 пикселей и FOV 384×384 мм2, расположенной в плоскости, ортогональной оси цилиндра. Радиусы цилиндров выбирали равными r=271,5 и R=300 мм, чтобы все катушки находились снаружи FOV. В направлении z положения катушек изменяются в диапазоне от -200 до +200 мм от рассматриваемого FOV.
Результаты моделирования показывают, что способ выбора катушек на основе SVD дает результаты, сравнимые с выбором на основе SNR при намного меньшей сложности вычислений. Кроме того, оценка набора по одной катушке требует большего объема вычислений при выборе катушек на основе SNR, чем при выборе на основе SVD, что приводит к еще большему показателю требуемого времени вычислений. Время вычислений для матрицы 384×384 оценивали в процессоре Xion, с CPU (центральным процессором) 2,4 ГГц и памятью 4 Гбайта. Время выбора катушек на основе SVD составляло t=0,02 с, и время выбора катушек на основе SNR составляло t=16,3 с, что является слишком большим временем в данной клинической практике. Приведенные результаты с очевидностью демонстрируют, что способ выбора катушек на основе SVD в соответствии с настоящим изобретением применим даже при клинических МР исследованиях в реальном времени.
Перечень цифровых позиций
100 система обработки данных
102 экран
104 устройство ввода
106 память
108 интерфейс
110 процессор
112 компьютерный программный продукт
114 модуль сбора данных
116 модуль выбора катушек
118 подвижный стол
120 пациент
122 основная катушка
124 корректирующие катушки
126 модуль выбора
128 интересуемая область
130 катушки
132 приемный/передающий блок
| название | год | авторы | номер документа |
|---|---|---|---|
| УСКОРЕННОЕ ОТОБРАЖЕНИЕ ПОЛЯ B | 2010 |
|
RU2534724C2 |
| ЭМУЛЯЦИЯ ВИРТУАЛЬНЫХ КАТУШЕК В МРТ С ПАРАЛЛЕЛЬНОЙ ПЕРЕДАЧЕЙ | 2011 |
|
RU2582474C2 |
| СИСТЕМА МНОГОКАДРОВОЙ МАГНИТНО-РЕЗОНАНСНОЙ (МР) ТОМОГРАФИИ И СПОСОБ ЕЕ ФУНКЦИОНИРОВАНИЯ | 2015 |
|
RU2697994C2 |
| КАРТИРОВАНИЕ ФУНКЦИИ ГРАДИЕНТНОГО ИМПУЛЬСНОГО ОТКЛИКА | 2017 |
|
RU2736557C2 |
| МНОГОЭЛЕМЕНТНАЯ ПЕРЕДАЮЩАЯ РАДИОЧАСТОТНАЯ ЦЕПЬ С ЛОКАЛЬНЫМ УСТРОЙСТВОМ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ И СОГЛАСОВАНИЯ | 2010 |
|
RU2544867C2 |
| УМЕНЬШЕНИЕ SAR В ПАРАЛЛЕЛЬНОЙ ПЕРЕДАЧЕ ПОСРЕДСТВОМ ЗАВИСИМОГО ОТ КАОННОГО ПРОСТРАНСТВА ВЫБОРА RF-ИМПУЛЬСОВ | 2010 |
|
RU2522179C2 |
| УДАЛЕНИЕ АРТЕФАКТОВ ИЗОБРАЖЕНИЙ ПРИ SENSE-ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2730431C2 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ РЕКОНСТРУКЦИИ МАГНИТНО-РЕЗОНАНСНОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2626184C2 |
| УДАЛЕНИЕ ФОНА ПРИ ПОЛУЧЕНИИ ИЗОБРАЖЕНИЙ С ИСПОЛЬЗОВАНИЕМ МАГНИТНЫХ ЧАСТИЦ | 2012 |
|
RU2622481C2 |
| Отслеживающая система и маркерное устройство, подлежащее отслеживанию отслеживающей системой | 2019 |
|
RU2806663C2 |
Изобретение относится к способу выбора набора катушечных элементов из множества физических катушечных элементов, содержащихся в комплекте катушек, для выполнения магнитно-резонансного сканирования интересуемой области для визуализации. Техническим результатом заявленного изобретения выступает усовершенствование способа выбора набора катушечных элементов из множества катушечных элементов и повышение отношения сигнала к шуму (SNR). Технический результат достигается благодаря тому, что настоящее изобретение раскрывает способ выбора набора катушек, при этом набор катушечных элементов содержит катушечные элементы, имеющие наибольший вклад, и только они используются для проведения дальнейшей выборки. Выбор осуществляется на основе матрицы проекций, проецирующей матрицу чувствительности катушек на матрицу чувствительности набора виртуальных катушечных элементов, при этом матрица проекций вычисляется на основе сингулярного разложения, а также содержит вклад каждого катушечного элемента из множества катушечных элементов в набор виртуальных катушечных элементов. 3 н. и 6 з.п. ф-лы, 4 ил.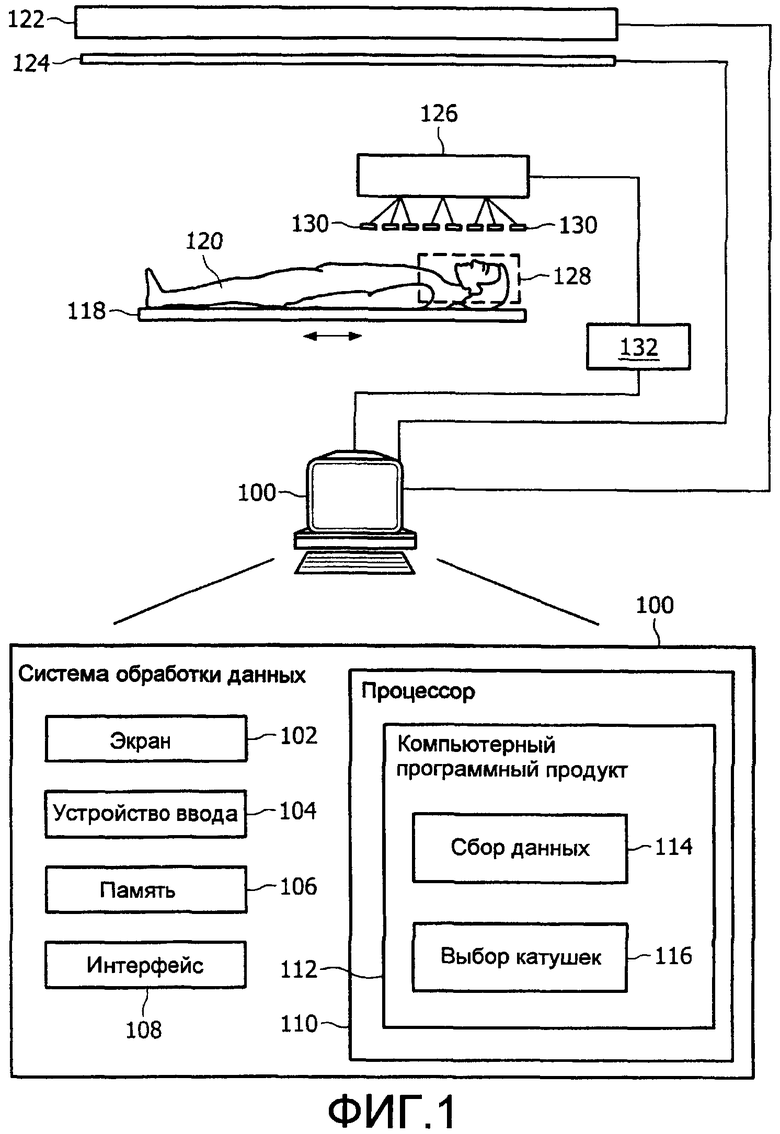
1. Способ выбора набора катушечных элементов из множества физических катушечных элементов (130), содержащихся в комплекте катушек, для выполнения магнитно-резонансного сканирования интересуемой области (128) для визуализации, при этом способ содержит этапы, на которых: определяют матрицу чувствительности катушек множества физических катушечных элементов (130) для интересуемой области (128), с использованием данных предварительного сканирования, полученных при предварительном сканировании интересуемой области, определяют матрицу проекций посредством факторизации матрицы чувствительности катушки, причем факторизацию выполняют методом сингулярного разложения, причем матрица проекций проецирует матрицу чувствительности множества физических катушечных элементов на матрицу чувствительности набора виртуальных катушечных элементов, причем векторы чувствительности матрицы чувствительности набора виртуальных катушечных элементов получены в виде суперпозиции чувствительностей физических, катушек матрицы чувствительности катушек, определяют из матрицы проекций вклад каждого физического катушечного элемента из множества физических катушечных элементов в набор виртуальных катушечных элементов, выбирают на основании вклада набор физических катушечных элементов с наиболее значимым вкладом в качестве набора катушечных элементов.
2. Способ по п.1, в котором вклад физического катушечного элемента (130) определяют суммированием всех величин элементов матрицы проекций, получающих вклад от физического катушечного элемента.
3. Способ по п.1, в котором вклад физического катушечного элемента (130) является усредненным вкладом физического катушечного элемента во все воксели в интересуемой области.
4. Способ по п.1, дополнительно содержащий этап, на котором определяют матрицу корреляции шума множества физических катушечных элементов, при этом матрицу проекций определяют на основе матрицы чувствительности катушек и матрицы корреляции шума.
5. Способ по п.1, дополнительно содержащий этап, на котором определяют дополнительные вклады каждого физического катушечного элемента из множества физических катушечных элементов в набор виртуальных катушечных элементов с использованием матрицы корреляции шума, при этом выбор физических катушечных элементов с наиболее значимым вкладом в качестве набора катушечных элементов дополнительно содержит этап, на котором умножают на весовой коэффициент вклад каждого физического катушечного элемента в соответствии с дополнительными вкладами, полученными на основе матрицы корреляции шума.
6. Способ по п.5, в котором дополнительные вклады вычисляют с помощью дополнительной матрицы проекций, при этом дополнительную матрицу проекций определяют факторизацией матрицы корреляции шума.
7. Способ по п.1, в котором матрица чувствительности катушек является матрицей чувствительности приемных катушек или матрицей чувствительности передающих катушек.
8. Процессор, выполненный с возможностью исполнения машиноисполняемых команд компьютерного программного продукта для выполнения этапов способа по любому из предыдущих пп.1-7.
9. Система магнитно-резонансной визуализации, содержащая комплект катушек (130), предназначенных для выполнения магнитно-резонансного сканирования интересуемой области (128) для визуализации, при этом комплект катушек содержит множество физических катушечных элементов (130),
средство (116) для определения матрицы чувствительности катушек множества физических катушечных элементов для интересуемой области с использованием данных предварительного сканирования, полученных при предварительном сканировании интересуемой области, средство (116) для определения матрицы проекций, посредством факторизации матрицы чувствительности катушек, причем факторизацию выполняют методом сингулярного разложения, причем матрица проекций проецирует матрицу чувствительности множества физических катушечных элементов на матрицу чувствительности набора виртуальных катушечных элементов, и для получения векторов чувствительности матрицы чувствительности набора виртуальных катушечных элементов в виде суперпозиции чувствительностей физических катушек матрицы чувствительности катушек,
средство (116) для определения на основе матрицы проекций вклада каждого физического катушечного элемента из множества физических катушечных элементов в набор виртуальных катушечных элементов, средство (116; 126) для выбора на основании вклада набора физических катушечных элементов с наиболее значимым вкладом в качестве набора катушечных элементов, применимого для выполнения магнитно-резонансного сканирования интересуемой области для визуализации.
| WO 2006122013 A2, 16.11.2006 | |||
| US 0006927574 B2, 09.08.2005 | |||
| US 20070013375 A1, 18.01.2007 | |||
| US 7279893 В1, 19.10.2007. |

