Область техники, к которой относится изобретение
Настоящее изобретение относится к фазовой коррекции в магнитно-резонансной томографии, в частности, к способам и устройствам фазовой коррекции в системе магнитно-резонансной томографии с использованием нескольких антенных элементов.
Уровень техники
В магнитно-резонансной томографии (МРТ) общей проблемой являются изменения фазы, обусловленные пространственно-временными неоднородностями главного магнитного поля. Артефакты изображения, такие как, например, пульсации и модуляции интенсивности, вызванные этими флуктуациями, могут значительно снизить качество изображений.
Такие неоднородности обусловлены, например, движением пациента, что является повсеместной проблемой в МРТ. Но даже если пациент полностью находится в поле зрения, смещения или флуктуации, независимо от того, имеют ли они физиологическое происхождение, например, дыхание или движение сердца, или техническое происхождение, например, тепловой дрейф (тепловые смещения) сканера, могут оказывать значительное влияние на качество изображения.
Это особенно актуально, например, при градиент-эхо сканировании при большом времени эхо (TE, от англ. echo time), где смещения и флуктуации главного поля, т.е. B0 нерезонансного поля, могут привести к появлению паразитных изображений и других артефактов. Ранее для исправления этих ошибок было предложено множество способов, начиная от использования дополнительных магнитно-резонансных сигналов, например, навигаторов или эхо навигаторов, также использование внешних датчиков, таких как дыхательные пояса или камеры, и заканчивая ретроспективными подходами, включающими в себя итеративную реконструкцию при минимизации стоимостной функции данного изображения.
Раскрытие сущности изобретения
Изобретение обеспечивает систему магнитно-резонансной томографии, способ работы системы магнитно-резонансной томографии и компьютерный программный продукт в независимых пунктах формулы. Варианты осуществления приведены в зависимых пунктах формулы изобретения.
Специалисту в данной области техники очевидно, что аспекты настоящего изобретения могут быть воплощены в виде устройства, способа или компьютерного программного продукта. Соответственно, аспекты настоящего изобретения могут принимать форму полностью аппаратного варианта осуществления, полностью программного варианта осуществления (включая встроенное программное обеспечение, резидентное программное обеспечение, микропрограммы и т.д.) или варианта осуществления, объединяющего аспекты программного и аппаратного обеспечения, которые в общем случае могут упоминаться в настоящем документе как "схема", "модуль" или "система". Кроме того, аспекты настоящего изобретения могут принимать форму компьютерного программного продукта, воплощенного на одном или более машиночитаемых носителях, имеющих записанный на них компьютерно-исполняемый код.
Может быть использована любая комбинация одного или более машиночитаемых носителей. Машиночитаемый носитель может представлять собой машиночитаемый носитель сигналов (машиночитаемую сигнальную среду) или машиночитаемый носитель данных (машиночитаемую среду хранения). “Машиночитаемый носитель данных", в смысле, используемом в настоящем документе, включает в себя любой материальный носитель данных, на котором могут храниться инструкции, исполняемые процессором вычислительного устройства. Машиночитаемый носитель данных может упоминаться, как машиночитаемый долговременный носитель данных. Машиночитаемый носитель данных может также упоминаться, как материальный машиночитаемый носитель. В некоторых вариантах осуществления машиночитаемый носитель данных может также хранить данные, доступ к которым осуществляется процессором вычислительного устройства. Примеры машиночитаемых носителей данных включают в себя, но не ограничиваются ими: дискету, магнитный жесткий диск, твердотельный жесткий диск, флэш-память, USB флэш-накопитель, оперативное запоминающее устройство (ОЗУ), постоянное запоминающее устройство (ПЗУ), оптический диск, магнитооптический диск, и набор регистров процессора. Примерами оптических дисков являются компакт-диски (CD) и цифровые универсальные диски (DVD), например, диски CD-ROM, CD-RW, CD-R, DVD-ROM, DVD-RW или DVD-R. Термин машиночитаемый носитель данных также относится к различным типам носителей данных, к которым компьютерное устройство может получить доступ через сеть или канал связи. Например, данные могут быть получены через модем, Интернет или локальную сеть. Компьютерно-исполняемый код, записанный на машиночитаемом носителе, может передаваться с помощью любого соответствующего носителя, включая в себя, но не ограничиваясь ими, беспроводную линию связи, проводную линию связи, оптоволоконный кабель, радиочастотный канал и т.д. или любую подходящую комбинацию вышеперечисленного.
Машиночитаемый носитель сигналов может включать в себя распространяемый сигнал данных с воплощенным в нем компьютерно-исполняемым кодом, например, на основной полосе частот или в составе несущей волны. Такой распространяемый сигнал может принимать любую из множества форм, включая в себя, но не ограничиваясь ими, электромагнитную, оптическую или любую подходящую их комбинацию. Машиночитаемый носитель сигналов может представлять собой любой машиночитаемый носитель, который не является машиночитаемым носителем данных, и который может передавать, распространять или транспортировать программу для использования системой, аппаратом или устройством исполнения инструкций или совместно с ними.
“Компьютерная память" или "память" является примером машиночитаемого носителя данных. Компьютерной памятью является любая память, которая непосредственно доступна процессору. “Компьютерное хранилище" или "хранилище" является еще одним примером машиночитаемого носителя данных. Компьютерной памятью является любой энергонезависимый машиночитаемый носитель данных. В некоторых вариантах осуществления компьютерное хранилище может представлять собой также компьютерную память, или наоборот.
“Процессор", в смысле, используемом в данном документе, включает в себя электронный компонент, который способен исполнять программу или машино-исполняемую инструкцию, или компьютерно-исполняемый код. Ссылки на вычислительное устройство, содержащее "процессор", следует понимать, как, возможно, содержащее более одного процессора или процессорного ядра. Процессор может представлять собой, например, многоядерный процессор. Процессор может также относиться к набору процессоров в рамках одной компьютерной системы или быть распределенным между несколькими компьютерными системами. Термин "вычислительное устройство" также следует понимать, как относящийся к набору или сети вычислительных устройств, каждое из которых содержит процессор или процессоры. Компьютерно-исполняемый код может исполняться несколькими процессорами, которые могут находиться внутри одного вычислительного устройства или могут быть даже распределены между несколькими вычислительными устройствами.
Компьютерно-исполняемый код может содержать машино-исполняемые инструкции или программу, которые вынуждают процессор выполнять тот или иной аспект настоящего изобретения. Компьютерно-исполняемый код для выполнения операций аспектов настоящего изобретения может быть написан на любой комбинации одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Smalltalk, C++ или подобные языки, и обычные языки процедурного программирования, такие как язык программирования "C" или аналогичные языки программирования, и скомпилирован в машино-исполняемые инструкции. В некоторых случаях компьютерно-исполняемый код может быть в форме языка высокого уровня или в предварительно скомпилированной форме и использоваться совместно с интерпретатором, который генерирует машино-исполняемые инструкции "на лету".
Компьютерно-исполняемый код может выполняться полностью на компьютере пользователя, частично на компьютере пользователя, как самостоятельный программный пакет, частично на компьютере пользователя и частично на удаленном компьютере или полностью на удаленном компьютере или сервере. В последнем сценарии удаленный компьютер может быть подключен к компьютеру пользователя через любой тип сети, в том числе локальную сеть (LAN) или глобальную сеть (WAN), либо подключение может быть выполнено к внешнему компьютеру (например, через Интернет с помощью Интернет-провайдера).
Аспекты настоящего изобретения описаны со ссылкой на иллюстрации поточных диаграмм и/или блок-схемы способов, устройств (систем) и компьютерных программных продуктов в соответствии с некоторыми вариантами осуществления изобретения. Следует понимать, что каждый блок или часть блоков поточных диаграмм, иллюстраций и/или блок-схем могут быть реализованы посредством компьютерных программных инструкций в виде компьютерно-исполняемого кода, когда это применимо. Кроме того, следует понимать, что, когда это не является взаимоисключающим, может быть осуществлено объединение блоков в различных поточных диаграммах, иллюстрациях и/или блок-схемах. Данные компьютерные программные инструкции могут быть предоставлены процессору компьютера общего назначения, компьютера специального назначения или другого программируемого устройства обработки данных для создания машины, такой чтобы инструкции, исполняемые процессором компьютера или другого программируемого устройства обработки данных, создавали средства для реализации функций/действий, указанных в поточной диаграмме и/или блоке или блоках блок-схемы.
Данные компьютерные программные инструкции могут также храниться на машиночитаемом носителе, который может предписывать компьютеру, другому программируемому устройству обработки данных или другим устройствам функционировать определенным образом, так чтобы инструкции, хранящиеся на машиночитаемом носителе, производили изделие, включая инструкции, которые реализуют функцию/действие, указанные в поточной диаграмме и/или блоке или блоках блок-схемы.
Компьютерные программные инструкции могут быть также загружены в компьютер, другое программируемое устройство обработки данных или другие устройства, чтобы привести к выполнению серий операций на компьютере, другом программируемом устройстве или других устройствах, чтобы сформировать компьютерно-реализуемый процесс так, чтобы инструкции, исполняемые на компьютере или другом программируемом устройстве, обеспечивали процессы для реализации функций/действий, указанных в поточной диаграмме и/или блоке или блоках блок-схемы.
“Пользовательский интерфейс", в смысле, используемом в данном документе, представляет собой интерфейс, позволяющий пользователю или оператору взаимодействовать с компьютером или компьютерной системой. “Пользовательский интерфейс" также можно назвать "устройством взаимодействия с человеком". Пользовательский интерфейс может предоставлять информацию или данные оператору и/или получать информацию или данные от оператора. Пользовательский интерфейс может обеспечивать возможность получения компьютером данных ввода от оператора и может обеспечивать вывод данных с компьютера. Другими словами, пользовательский интерфейс может позволять оператору управлять или манипулировать компьютером, а компьютеру может позволять указывать результаты такого управления или манипулирования оператора. Отображение данных или информации на дисплее или в графическом пользовательском интерфейсе является примером предоставления информации оператору. Получение данных через клавиатуру, мышь, трекбол, сенсорную панель, координатно-указательное устройство, графический планшет, джойстик, геймпад, веб-камеру, гарнитуру, педали, проводную перчатку, пульт дистанционного управления и акселерометр - все это примеры компонентов пользовательского интерфейса, которые позволяют получать информацию или данные от оператора.
“Аппаратный интерфейс", в смысле, используемом в данном документе, включает в себя интерфейс, позволяющий процессору компьютерной системы взаимодействовать с внешним вычислительным устройством и/или аппаратом и/или управлять ими. Аппаратный интерфейс может позволить процессору посылать управляющие сигналы или инструкции ко внешнему вычислительному устройству и/или аппарату. Аппаратный интерфейс может также позволить процессору обмениваться данными с внешним вычислительным устройством и/или аппаратом. Примеры аппаратного интерфейса включают в себя, но не ограничиваются ими: универсальную последовательную шину, порт IEEE 1394, параллельный порт, порт IEEE 1284, последовательный порт, порт RS-232, порт IEEE-488, соединение Bluetooth, беспроводное подключение к локальной сети, соединение TCP/IP, соединение Ethernet, интерфейс напряжения управления, MIDI-интерфейс, интерфейс аналогового входа и интерфейс цифрового входа.
“Дисплей" или "устройство отображения", в смысле, используемом в данном документе, включает в себя выходное устройство или пользовательский интерфейс, выполненный с возможностью отображения изображений или данных. Дисплей может выводить визуальные, звуковые и тактильные данные. Примеры дисплеев включают в себя, но не ограничиваются ими: компьютерный монитор, телевизионный экран, сенсорный экран, тактильный электронный дисплей, экран Брайля, электронно-лучевую трубку (ЭЛТ), запоминающую ЭЛТ, бистабильный дисплей, электронную бумагу, векторный дисплей, плоскоэкранный дисплей, вакуумный флуоресцентный дисплей (ВФД), светодиодные дисплеи (LED), электролюминесцентный дисплей (ЭЛД), плазменные панели (ПП), жидкокристаллический дисплей (LCD), дисплеи на органических светодиодах (OLED), проектор и портативный видеошлем.
Под магнитно-резонансными (МР) данными в данном документе понимают регистрируемые измерения радиочастотных сигналов, излучаемых ядерными спинами, с помощью антенны магнитно-резонансного аппарата во время магнитно-резонансного томографического сканирования. Магнитно-резонансные данные MRF представляют собой магнитно-резонансные данные. Магнитно-резонансные данные являются примером данных медицинского изображения. Под изображением магнитно-резонансной томографии (МРТ) или МР-изображением в данном документе понимают реконструированную двух- или трехмерную визуализацию анатомических данных, содержащихся в данных магнитно-резонансной томографии. Данная визуализация может быть выполнена с помощью компьютера.
В одном из аспектов изобретение обеспечивает систему магнитно-резонансной томографии. Система МРТ содержит главный магнит для генерирования главного магнитного поля, т.е. B0 нерезонансного поля, в зоне визуализации, а также градиентную систему магнитного поля для генерирования пространственно зависимого градиентного магнитного поля в зоне визуализации. Система МРТ содержит радиочастотную систему с набором антенных элементов, каждый из которых выполнен с возможностью получения магнитно-резонансных данных из зоны визуализации. Набор антенных элементов может быть представлен, например, в форме магнитно-резонансной томографической катушки, которая содержит несколько антенных элементов, т.е. многоэлементной магнитно-резонансной томографической катушки. Катушка функционирует как приемная катушка для проведения магнитно-резонансной томографии, т.е. антенные элементы могут функционировать как элементы приемной катушки.
В памяти системы МРТ хранятся машино-исполняемые инструкции и команды импульсной последовательности. Команды импульсной последовательности предназначены для управления системой МРТ с целью получения магнитно-резонансных данных из зоны визуализации. Например, команды импульсной последовательности могут быть предназначены для управления системой магнитно-резонансной томографии с целью получения магнитно-резонансных данных в соответствии с протоколом параллельной визуализации. Данные импульсной последовательности могут предоставляться, например, в виде команд, которые могут быть исполнены процессором, или в виде временнóй диаграммы или временнóй информации, которая может быть преобразована программой в команды для управления системой магнитно-резонансной томографии. Кроме того, предусмотрен процессор для управления системой магнитно-резонансной томографии. Исполнение машино-исполняемых инструкций приводит к тому, что процессор управляет системой МРТ, выполняя следующие действия:
Каждый из антенных элементов получает из зоны визуализации магнитно-резонансные данные. Полученные магнитно-резонансные данные используются для реконструкции объединенных данных изображения. Реконструкция включает в себя преобразование полученных магнитно-резонансных данных антенных элементов из k-пространства в пространство изображения, например, с помощью обратного преобразования Фурье. Затем результирующие данные изображения антенных элементов объединяют.
Данные изображения антенных элементов могут быть объединены любым подходящим способом, соответствующим выбранной схеме осуществления выборки, например, суммой квадратов, SENSE (кодирование чувствительности) и т.д.
Реконструированные объединенные данные изображения используются для моделирования магнитно-резонансных данных, полученных каждым антенным элементом. Моделирование включает в себя преобразование реконструированных объединенных данных изображения из пространства изображения в k-пространство для каждого антенного элемента, например, с помощью преобразования Фурье.
Преобразование из пространства изображения в k-пространство может быть выполнено с помощью преобразования Фурье, в то время как преобразование из k-пространства в пространство изображения может быть выполнено с помощью обратного преобразования Фурье.
Для каждого антенного элемента определяют коэффициент фазовой коррекции для полученных магнитно-резонансных данных соответствующего антенного элемента с помощью полученных, а также смоделированных магнитно-резонансных данных. Для этого вычисляют разности фаз между полученными магнитно-резонансными данными или подходящей комбинацией полученных данных, например, среднее значение по динамике, и смоделированными магнитно-резонансными данными соответствующего антенного элемента.
Полученные магнитно-резонансные данные каждого элемента корректируют с помощью коэффициента фазовой коррекции, определенного для соответствующего антенного элемента.
Изобретение обеспечивает систему магнитно-резонансной томографии, которая позволяет делать поправку на смещения и флуктуации в B0 нерезонансном поле во время МРТ-сканирования по комплексным необработанным данным, т.е. полученным МРТ-данным в k-пространстве, без какой-либо дополнительной информации, например, от оптической камеры, дыхательного пояса, МР-навигатора и т.п. Флуктуации главного магнитного поля скорее оцениваются из необработанных МРТ-данных в k-пространстве, т.е. используется подход управляемый потоком данных. Такая управляемая потоком данных оценка флуктуаций поля помогает устранить потребность в дополнительных датчиках, дополнительном сборе МР-данных (навигаторах), а также в решении сложных задач минимизации.
Механизм коррекции заключается в том, что объединение магнитно-резонансных данных из разных каналов, т.е. антенных элементов, в области изображения и отображение этих объединенных данных обратно в k-пространство эффективно смешивает информацию из соседних точек k-пространства, что может привести, например, к усреднению. Полученные в результате усредненные данные, которые также могут называться как смоделированные магнитно-резонансные данные, имеют более низкую фазовую погрешность, поскольку не все соседние точки k-пространства испытывали одинаковую фазовую погрешность во время сбора данных. Таким образом, усреднение может по меньшей мере частично исключить фазовые погрешности, содержащиеся в полученных магнитно-резонансных данных.
Это может позволить скорректировать артефакты изображения, вызванные флуктуациями B0 нерезонансного поля, что может быть особенно актуально при градиент-эхо сканировании при большом времени эхо (TE), например, для T2*-картирования, визуализации, взвешенной по чувствительности, или количественного картирования чувствительности.
Источники  флуктуаций главного магнитного поля могут быть вызваны, например, дрейфом главного магнитного поля главного магнита во время сканирования, вызванным, например, нагревом. Еще одним источником может быть, например, дыхательное движение пациента в зоне визуализации или движение сердца. Движение сердца может быть особенно актуальным, например, при визуализации грудной клетки с динамическим контрастным усилением (DCE), когда сердце находится вблизи области, представляющей интерес. Кроме того, предложенный подход коррекции, управляемой потоком данных, может оказаться полезным для изменений поля вследствие сильного движения пациента вне отображаемого поля зрения.
флуктуаций главного магнитного поля могут быть вызваны, например, дрейфом главного магнитного поля главного магнита во время сканирования, вызванным, например, нагревом. Еще одним источником может быть, например, дыхательное движение пациента в зоне визуализации или движение сердца. Движение сердца может быть особенно актуальным, например, при визуализации грудной клетки с динамическим контрастным усилением (DCE), когда сердце находится вблизи области, представляющей интерес. Кроме того, предложенный подход коррекции, управляемой потоком данных, может оказаться полезным для изменений поля вследствие сильного движения пациента вне отображаемого поля зрения.
Варианты осуществления могут, например, использоваться для уменьшения артефактов при 3D декартовом градиент-эхо сканировании, но могут также применяться при многослойном 2D-сканировании. Другим применением этой методики может быть, например, динамическое сканирование. Коэффициент фазовой коррекции может быть вычислен с использованием отдельных кадров или среднего по времени значения всех динамических кадров. Последнее имеет то преимущество, что может быть улучшено отношение сигнал-шум (SNR, от англ. signal-to-noise ratio).
В соответствии с некоторыми вариантами осуществления, может быть выполнено многократное получение магнитно-резонансных данных одних и тех же линий k-пространства. SNR итогового магнитно-резонансного изображения может быть улучшено путем получения некоторых или всех линий k-пространства множество раз и их усреднения. К полученным магнитно-резонансным данным может быть применена фазовая коррекция, например, перед усреднением по повторениям, чтобы устранить влияние B0-флуктуаций.
Эхо-планарная визуализация (EPI, от англ. echo planar imaging) является методикой, которая обеспечивает очень быструю визуализацию, но k-пространство собирается из множества градиентных эхо, полученных в разное время эхо. Таким образом, нерезонансные эффекты могут накапливаться во время цепочки эхо-сигналов. В данном случае коррекция, обеспечиваемая предлагаемой системой магнитно-резонансной томографии, может быть применена с учетом фактического времени эха каждой линии k-пространства.
Коррекция также может быть применена к динамическому однокадровому сканированию EPI, если за общее опорное значение берется среднее по времени. Это может быть важно, например, для функциональной МРТ, в которой однокадровая EPI является стандартной последовательностью, а надежная интенсивность сигнала Т2* взвешенных изображений является ключевым фактором в количественном определении BOLD эффекта (зависимости от степени насыщения крови кислородом, англ. blood oxygenation level dependent).
В соответствии с некоторыми вариантами осуществления может быть реконструировано магнитно-резонансное изображение одной катушки для каждого антенного элемента, который может быть реализован, например, в виде приемной катушки, с помощью магнитно-резонансных данных, полученных соответствующим антенным элементом. Из изображений одной катушки может быть сформировано объединенное магнитно-резонансное изображение, например, как взвешенная комбинация изображений одной катушки. Каждое из изображений одной катушки может быть взвешено по чувствительности приемной катушки, которая получила магнитно-резонансные данные, используемые для реконструкции соответствующего изображения одной катушки. Для каждой из приемных катушек смоделированные магнитно-резонансные данные могут быть вычислены, например, путем обратного преобразования объединенного магнитно-резонансного изображения, взвешенного по чувствительности соответствующей катушки. Отклонения фазы между полученными данными МРТ и смоделированными данными МРТ можно получить, сравнив, например, соотношение обратно преобразованных магнитно-резонансных данных k-пространства с полученными, т.е. измеренными, магнитно-резонансными данными k-пространства.
Таким образом, отклонения фазы главного магнитного поля вычисляют по измеренным магнитно-резонансным сигналам от отдельных приемных катушек. При этом из объединенного изображения, сформированного как взвешенное наложение нескольких изображений, реконструированных из данных, измеренных приемными катушками, синтезированные, т.е. смоделированные, данные k-пространства для каждой из соответствующих приемных катушек преобразуют обратно. Объединенное изображение может обеспечить хорошую аппроксимацию фактического распределения намагниченности в исследуемом пациенте в зоне визуализации, предполагающую гауссово распределение шума.
Варианты осуществления могут быть выгодно интегрированы в способы параллельной визуализации. В данном случае способ параллельной визуализации охватывает способы визуализации с использованием множества антенных элементов, например, приемных катушек, для магнитно-резонансной томографии. Пространственная информация, полученная из массива данных антенных элементов, осуществляющих параллельную выборку, может быть использована для выполнения некоторой части пространственного кодирования, обычно выполняемого градиентными полями, обычно фазово-кодирующим градиентом. Таким образом, время получения МРТ-изображений может быть ускорено без необходимости более быстрого переключения градиентов или дополнительной РЧ-мощности. Кроме того, параллельная визуализация может быть использована для распутывания магнитно-резонансных сигналов, поступающих из разных пространственных местоположений. Примерами параллельных способов визуализации являются одновременное получение пространственных гармоник (SMASH, от англ. simultaneous acquisition of spatial harmonics) в k-пространстве, обобщенное автокалибровочное частично-параллельное получение (GRAPPA, от англ. generalized autocalibrating partially parallel acquisition) и кодирование чувствительности пространства изображения (SENSE, от англ. sensitivity encoding).
Методика реконструкции SENSE была представлена в журнальной статье авторов: Прюссманн и др., "SENSE: кодирование чувствительности для быстрой МРТ", Магнитный резонанс в медицине (Pruessmann et al., SENSE: sensitivity encoding for fast MRI, Magnetic Resonance in Medicine), 42:952-962 (1999). Терминология для описания реконструкции SENSE хорошо известна и была предметом многих обзорных статей, а также присутствует в стандартных текстах по магнитно-резонансной томографии. Например, в "Справочнике импульсных последовательностей МРТ" Бернстайна и др. (Handbook of MRI Pulse Sequence, Bernstein et al.), опубликованном издательством Elsevier Academic Press в 2004 году, содержится обзор методики реконструкции SENSE на страницах 527-531.
В соответствии с некоторыми вариантами осуществления, реконструкция объединенных данных изображения, моделирование магнитно-резонансных данных, определение коэффициента фазовой коррекции и коррекция полученных магнитно-резонансных данных итеративно повторяются с использованием скорректированных магнитно-резонансных данных с целью последующей коррекции скорректированных магнитно-резонансных данных до тех пор, пока не будет удовлетворен предварительно заданный критерий завершения. Предварительно заданный критерий завершения может быть, например, удовлетворен, когда вычисленная разность фаз становится меньше предварительно заданного порогового значения или когда достигается предварительно заданное максимальное количество шагов итераций.
Варианты осуществления могут иметь положительный эффект, обеспечивая точный и быстрый способ полного картирования пространственных неоднородностей главного магнитного поля в системе магнитно-резонансной томографии, т.е. B0-картирования. Итерирование может исключить отклонения фазы, вызванные другими причинами, и отделяет отклонения фазы, вызванные пространственными отклонениями главного магнитного поля. Таким образом, дрейф B0-нерезонансной частоты может быть выведен из самого необработанного магнитно-резонансного сигнала в процессе итераций, что улучшает самосогласованность набора данных. Небольшого числа шагов итераций, например, 3-10, например, 4, 5, 6 или 7, может быть достаточно для полного удаления артефактов, вызванных  неоднородностями, т.е. эффектами отклонений.
неоднородностями, т.е. эффектами отклонений.
Если измеренный МР-сигнал искажен вкладом, который изменяется во времени, это приводит к несогласованности в данных Фурье-пространства. Проходя полный цикл от полученных магнитно-резонансных данных в k-пространстве до реконструированных объединенных данных изображения в пространстве изображения и обратно к необработанным данным, эти несогласованности приводят к остаточной фазовой погрешности в k-пространстве. Данная погрешность пропорциональна, но потенциально меньше, чем фактическая фазовая погрешность, вызванная флуктуациями B0-нерезонансного поля. Полную, фактическую фазовую погрешность можно получить путем итерирования вычислений. Итерирование в зависимости от деталей используемого способа реконструкции изображения может быть выполнено, например, следующим образом:
1. Учитывая измеренный комплексный магнитно-резонансный сигнал  в k-пространстве для ряда антенных элементов с индексом a, изображения для каждого из антенных элементов могут быть реконструированы с помощью обратного преобразования Фурье для преобразования данных из k-пространства k в пространство изображения r:
в k-пространстве для ряда антенных элементов с индексом a, изображения для каждого из антенных элементов могут быть реконструированы с помощью обратного преобразования Фурье для преобразования данных из k-пространства k в пространство изображения r:
2. Затем изображения отдельных антенных элементов, например, объединяют с использованием чувствительности  соответствующих антенных элементов, т.е. приемных катушек:
соответствующих антенных элементов, т.е. приемных катушек:
Чувствительность отдельных приемных катушек, т.е. антенных элементов, может быть известна, например, из опорных сканирований или из автокалибровки.
Результирующее объединенное изображение I обычно является конечной точкой реконструкции.
3. Здесь, однако, объединенное изображение I используется для моделирования магнитно-резонансных данных, полученных каждым из антенных элементов. Изображение I умножается, например, на чувствительность катушки антенного элемента, для которого моделируются магнитно-резонансные данные, и преобразуется с помощью преобразования Фурье из пространства изображения обратно в k-пространство, получая  , смоделированные данные k -пространства для антенного элемента a:
, смоделированные данные k -пространства для антенного элемента a:

4. Фазовая погрешность  задается фазой комплексного соотношения
задается фазой комплексного соотношения  и
и  . Для улучшения SNR данные могут быть отсортированы в соответствии со временем, в котором было пройдено k-пространство, и отфильтрованы с помощью фильтра низких частот. Коэффициент фазовой коррекции затем применяется к необработанным данным , и начинается следующая итерация. После нескольких итераций процесс сходится, в результате чего получается полная фазовая коррекция.
. Для улучшения SNR данные могут быть отсортированы в соответствии со временем, в котором было пройдено k-пространство, и отфильтрованы с помощью фильтра низких частот. Коэффициент фазовой коррекции затем применяется к необработанным данным , и начинается следующая итерация. После нескольких итераций процесс сходится, в результате чего получается полная фазовая коррекция.
Тот факт, что существует разница в  и
и  можно понять, если учесть, что умножение с чувствительностью катушки в пространстве изображения соответствует свертке с преобразованием Фурье в k-пространстве. При этом смешиваются несоответствия, вызванные изменением B0-нерезонансного поля, что приводит к усреднению несоответствий. Вышеуказанная процедура может быть продолжена (вновь итерирована) до тех пор, пока несоответствие не исчезнет, например, после 3, 4, 5, 6 или 7 итераций.
можно понять, если учесть, что умножение с чувствительностью катушки в пространстве изображения соответствует свертке с преобразованием Фурье в k-пространстве. При этом смешиваются несоответствия, вызванные изменением B0-нерезонансного поля, что приводит к усреднению несоответствий. Вышеуказанная процедура может быть продолжена (вновь итерирована) до тех пор, пока несоответствие не исчезнет, например, после 3, 4, 5, 6 или 7 итераций.
Понимание того, что эффект объединения катушек приводит к разнице в исходных и смоделированных данных k-пространства, позволяет обнаруживать флуктуации поля B0 на основе потока данных.
Шаги 1 и 2 выше описывают многоканальную реконструкцию, например, для полностью дискретизированных декартовых наборов данных. В более общих выражениях, они описывают путь от многоканальных данных k-пространства к единому реконструированному изображению (например, 2D, 3D или 2D+время и т.д.), т.е. описывают алгоритм реконструкции изображения. В зависимости от специфики получения данных, например, недодискретизация k-пространства или полусканирование, фактическая форма реконструкции изображения может отличаться от приведенных в качестве примера формул в п.п. 1 и 2 выше.
Шаг 3 описывает данные моделирования в k-пространстве из изображения, т.е. данные в пространстве изображения. Опять же, математические детали этого шага зависят от специфики получения.
Независимо от деталей реконструкции объединенных данных изображения в пространстве изображения, фазовая коррекция может, например, быть вычислена итерационно следующим образом: Пусть  - полученные магнитно-резонансные данные антенного элемента a в k-пространстве, а
- полученные магнитно-резонансные данные антенного элемента a в k-пространстве, а  - магнитно-резонансные данные в k-пространстве, смоделированные из
- магнитно-резонансные данные в k-пространстве, смоделированные из  , где
, где  - это положение в k-пространстве и a - антенный элемент, т.е. канал, индекс.
- это положение в k-пространстве и a - антенный элемент, т.е. канал, индекс.
Используя и первый коэффициент фазовой коррекции вычисляют как:

Коэффициент фазовой коррекции используют для коррекции полученных магнитно-резонансных данных , приводя к получению скорректированных магнитно-резонансных данных  :
:

Затем моделируют следующие данные  , начиная со скорректированных магнитно-резонансных данных вместо первоначально полученных магнитно-резонансных данных . Данные и затем используют для вычисления следующей фазовой коррекции
, начиная со скорректированных магнитно-резонансных данных вместо первоначально полученных магнитно-резонансных данных . Данные и затем используют для вычисления следующей фазовой коррекции  и так далее до тех пор, пока не будет удовлетворен предварительно заданный критерий завершения. Предварительно заданный критерий завершения может быть, например, удовлетворен, когда фазовая коррекция
и так далее до тех пор, пока не будет удовлетворен предварительно заданный критерий завершения. Предварительно заданный критерий завершения может быть, например, удовлетворен, когда фазовая коррекция  становится меньше, чем предварительно заданное пороговое значение
становится меньше, чем предварительно заданное пороговое значение  или при достижении предварительно заданного максимального количества шагов n итераций.
или при достижении предварительно заданного максимального количества шагов n итераций.
Вышеупомянутая итерация может сойтись через несколько шагов. Общая фазовая коррекция представляет собой сумму всех  , т.е.
, т.е.  , где
, где  - количество шагов, после которых итерация сходится, т.е. фазовая коррекция
- количество шагов, после которых итерация сходится, т.е. фазовая коррекция  меньше предварительно заданного порогового значения
меньше предварительно заданного порогового значения  .
.
Следует отметить, что в качестве альтернативы соотношению  и
и  , которое используется выше, произведение и
, которое используется выше, произведение и  может использоваться для вычисления коэффициента фазовой коррекции. В данном случае является комплексно спряженным .
может использоваться для вычисления коэффициента фазовой коррекции. В данном случае является комплексно спряженным .
В соответствии с некоторыми вариантами осуществления, каждый антенный элемент получает несколько наборов магнитно-резонансных данных из зоны визуализации. Каждый из наборов получают в разное время. Другими словами, каждый антенный элемент может получить первый набор магнитно-резонансных данных в первый момент времени, второй набор магнитно-резонансных данных - во второй момент времени и так далее. Преобразование полученных магнитно-резонансных данных антенных элементов из k-пространства в пространство изображения включает в себя для каждого антенного элемента усреднение по времени полученных магнитно-резонансных данных наборов соответствующих антенных элементов и преобразование результирующих магнитно-резонансных данных из k-пространства в пространство изображения. Или для каждого антенного элемента могут быть преобразованы магнитно-резонансные данные наборов соответствующих антенных элементов, а результирующие магнитно-резонансные данные усредняют по времени.
Варианты осуществления могут иметь положительный эффект, заключающийся в обеспечении возможности компенсации флуктуаций в случае измерений временных рядов, когда множество наборов магнитно-резонансных данных получают в множество моментов времени. Это может быть полезно для МРТ с динамическим контрастным усилением или функциональной МРТ/EPI, где данные измеряются в режиме 2D + время.
В соответствии с некоторыми вариантами осуществления, для каждой точки k-пространства, содержащейся в полученных магнитно-резонансных данных, определяют индивидуальный коэффициент фазовой коррекции, который используют для коррекции магнитно-резонансных данных, полученных для соответствующей точки. Определение индивидуальных коэффициентов фазовой коррекции включает в себя вычисление для каждой из точек в k-пространстве индивидуальной разности фаз между магнитно-резонансными данными, полученными для соответствующей точки, и магнитно-резонансными данными, смоделированными для соответствующей точки.
Варианты осуществления могут иметь положительный эффект, заключающийся в том, что для каждой точки в k-пространстве может быть определен индивидуальный коэффициент фазовой коррекции, позволяющий проводить точную фазовую коррекцию отдельных частот.
В соответствии с некоторыми вариантами осуществления, коэффициент фазовой коррекции представляет собой усредненный коэффициент фазовой коррекции, определенный для поднабора полученных магнитно-резонансных данных и используемый для коррекции полученных магнитно-резонансных данных, содержащихся в указанном поднаборе. Определение усредненного коэффициента фазовой коррекции включает в себя вычисление усредненной разности фаз путем усреднения по разностям фаз, вычисленным между полученными магнитно-резонансными данными, содержащимися в поднаборе и смоделированными магнитно-резонансными данными.
Варианты осуществления могут иметь положительный эффект, заключающийся в том, что в зависимости от выбора поднабора и деталей используемой процедуры усреднения, могут быть реализованы различные способы балансировки пространственного разрешения и SNR коррекции. Например, точки с высоким сигналом могут вносить больший вклад в конечное среднее, чем точки с низким сигналом, что приводит к взвешенному усреднению SNR.
В соответствии с некоторыми вариантами осуществления поднабор включает в себя первую выборку полученных магнитно-резонансных данных, которые расположены на линии вдоль направления считывания в k-пространстве таким образом, чтобы усредненная разность фаз была усреднена по направлению считывания. Направление считывания может располагаться вдоль направления kx, а коэффициент фазовой коррекции может быть вычислен следующим образом:

или
 .
.
В соответствии с некоторыми вариантами осуществления поднабор включает в себя вторую выборку полученных магнитно-резонансных данных разных антенных элементов, полученных для одной и той же точки в k-пространстве так, чтобы усредненная разность фаз была усреднена по антенным элементам. Коэффициент фазовой коррекции может быть вычислен следующим образом:

или

В соответствии с некоторыми вариантами осуществления поднабор включает в себя третью выборку полученных магнитно-резонансных данных, полученных в предварительно заданном временном интервале таким образом, чтобы усредненная разность фаз была усреднена по временному интервалу. Коэффициент фазовой коррекции может быть вычислен следующим образом:

или

Операция усреднения включает в себя все точки  k-пространства, полученные в течение определенного временного интервала вблизи времени получения .
k-пространства, полученные в течение определенного временного интервала вблизи времени получения .
В соответствии с некоторыми вариантами осуществления, весовые коэффициенты присваивают полученным магнитно-резонансным данным, содержащимся в поднаборе, и используют для вычисления усредненной разности фаз. Например, можно использовать твердые весовые значения 0 или 1. Такие твердые весовые значения соответствуют выбору поднабора, как описано выше, в котором все магнитно-резонансные данные, содержащиеся в поднаборе, взвешены одинаково, в то время как все магнитно-резонансные данные не учитываются при усреднении. В качестве альтернативы можно ввести множество различных дискретных весовых коэффициентов. Они могут быть, например, равномерно распределены по интервалу [0;1] или в соответствии с непрерывной функцией, например, в соответствии с гауссовым распределением. Таким образом, различные точки магнитно-резонансных данных могут быть взвешены по-разному в зависимости, например, от их положения в k-пространстве, от времени их получения, от антенного элемента, с помощью которого они были получены, и т.д.
В соответствии с некоторыми вариантами осуществления, преобразование реконструированных объединенных данных изображения из пространства изображения в k-пространство выполняют для каждого измерения пространства изображения.
Варианты осуществления могут иметь положительный эффект заключающийся в том, что описанный выше эффект усреднения фазовых погрешностей реализован для всех измерений k-пространства.
В соответствии с некоторыми вариантами осуществления, преобразование реконструированных объединенных данных изображения из пространства изображения в k-пространство выполняют для каждого измерения пространства изображения, за исключением поднабора измерений пространства изображения, который остается непреобразованным, так что результирующие смоделированные магнитно-резонансные данные находятся в гибридном пространстве, включающем в себя поднабор измерений пространства изображения и одно или более измерений k-пространства. Для определения коэффициента фазовой коррекции и коррекции полученных магнитно-резонансных данных выполняют преобразование полученных магнитно-резонансных данных каждого антенного элемента из k-пространства в пространство изображения для измерений пространства изображения, содержащегося в поднаборе измерений таким образом, чтобы результирующие преобразованные магнитно-резонансные данные находились в гибридном пространстве, причем определение коэффициента фазовой коррекции и коррекцию полученных магнитно-резонансных данных осуществляют в гибридном пространстве с помощью преобразованных магнитно-резонансных данных. Например, поднабор измерений пространства изображения включает в себя одно измерение пространства изображения, т.е. соответствующее измерение, например, совпадающее с направлением считывания. В соответствии с другим примером, поднабор измерений пространства изображения включает в себя несколько измерений пространства изображения.
Варианты осуществления могут иметь положительный эффект заключающийся в том, что вместо вычисления коэффициента фазовой коррекции в чистом k-пространстве, коэффициент фазовой коррекции вычисляют в гибридном пространстве x,  ,
,  в котором обратное преобразование Фурье было выполнено, например, в направлении считывания. Преимущество может заключаться в том, что пространственная информация в направлении х может быть непосредственно использована при вычислении фазовой коррекции. Если есть, например, причина полагать, что флуктуации B0 могут изменяться в пространстве, то направление считывания может быть расположено вдоль направления наиболее сильного отклонения, а вычисление коррекции может проводиться в гибридном пространстве. Пространственное сглаживание вдоль x может быть использовано для улучшения SNR по аналогии с усреднением по
в котором обратное преобразование Фурье было выполнено, например, в направлении считывания. Преимущество может заключаться в том, что пространственная информация в направлении х может быть непосредственно использована при вычислении фазовой коррекции. Если есть, например, причина полагать, что флуктуации B0 могут изменяться в пространстве, то направление считывания может быть расположено вдоль направления наиболее сильного отклонения, а вычисление коррекции может проводиться в гибридном пространстве. Пространственное сглаживание вдоль x может быть использовано для улучшения SNR по аналогии с усреднением по  , как описано выше. Использование гибридного пространства возможно, например, для получения декартовых магнитно-резонансных данных.
, как описано выше. Использование гибридного пространства возможно, например, для получения декартовых магнитно-резонансных данных.
В соответствии с некоторыми вариантами осуществления для сбора магнитно-резонансных данных используют переплетенную схему выборки в k-пространстве, при этом в соответствии с переплетенной схемой выборки магнитно-резонансные данные из соседних точек в k-пространстве, содержащихся в полученных магнитно-резонансных данных, не собирают в прямой последовательности.
Варианты осуществления могут иметь положительный эффект заключающийся в том, что выборка k-пространства может быть оптимизирована для максимизации эффекта "усреднения" свертки с помощью Фурье-преобразования, описанного выше. Таким образом, уменьшение погрешности может стать более эффективным. Магнитно-резонансные данные, полученные близко во времени из соседних точек k-пространства, могут испытывать почти одинаковую фазовую погрешность. Таким образом, во избежание получения магнитно-резонансных данных из близких по времени соседних точек k-пространства, эффект усреднения, описанный выше, за счет объединения магнитно-резонансных данных от различных антенных элементов в области изображения и отображения объединенных данных обратно в k-пространство может быть более эффективным, так как данные, полученные почти в один и тот же момент времени, могут испытывать почти одинаковую фазовую погрешность и тем самым уменьшать эффект усреднения, основанный на разной фазовой погрешности, возникающей в точках k-пространства во время получения данных.
В соответствии с некоторыми вариантами осуществления, расстояние между точками в k-пространстве, для которых магнитно-резонансные данные получают в прямой последовательности, по меньшей мере равно эффективной занимаемой площади антенного элемента в k-пространстве.
Варианты осуществления могут иметь положительный эффект заключающийся в том, что они могут гарантировать эффективное уменьшение погрешности. Эффективная занимаемая площадь антенного элемента в k-пространстве может зависеть от возможности параллельной визуализации используемой матрицы катушек, что, таким образом, может быть учтено.
В другом аспекте изобретение обеспечивает компьютерный программный продукт, содержащий машино-исполняемые инструкции для исполнения процессором, управляющим системой магнитно-резонансной томографии. Система магнитно-резонансной томографии содержит главный магнит для генерирования главного магнитного поля в зоне визуализации, градиентную систему магнитного поля для генерирования пространственно-зависимого градиентного магнитного поля в зоне визуализации и радиочастотную систему, содержащую множество антенных элементов, каждый из которых выполнен с возможностью получения магнитно-резонансных данных из зоны визуализации. Система магнитно-резонансной томографии может также включать в себя память для хранения машино-исполняемых инструкций и команд импульсной последовательности, причем команды импульсной последовательности выполнены с возможностью управления системой магнитно-резонансной томографии с целью получения магнитно-резонансных данных из зоны визуализации.
Исполнение машино-исполняемых инструкций приводит к тому, что процессор управляет системой магнитно-резонансной томографии для получения магнитно-резонансных данных из зоны визуализации каждым из антенных элементов. Система МРТ реконструирует объединенные данные изображений. Реконструкция включает в себя преобразование полученных магнитно-резонансных данных антенных элементов из k-пространства в пространство изображения, например, с помощью обратного преобразования Фурье, и объединение результирующих данных изображения антенных элементов. Магнитно-резонансные данные, полученные каждым антенным элементом, моделируют с использованием реконструированных объединенных данных изображения. Моделирование включает в себя преобразование реконструированных объединенных данных изображения из пространства изображения в k-пространство, например, с помощью преобразования Фурье.
Для каждого антенного элемента система МРТ определяет коэффициент фазовой коррекции для полученных магнитно-резонансных данных соответствующего антенного элемента. Определение включает в себя вычисление разности фаз между полученными магнитно-резонансными данными и смоделированными магнитно-резонансными данными соответствующего антенного элемента. Далее полученные магнитно-резонансные данные каждого соответствующего антенного элемента корректируют с помощью коэффициента фазовой коррекции, определенного для соответствующего антенного элемента.
В другом аспекте изобретение обеспечивает способ работы системы магнитно-резонансной томографии, как описано выше. Способ включает в себя получение каждым из антенных элементов магнитно-резонансных данных из зоны визуализации. Реконструируют объединенные данные изображения. Реконструкция включает в себя преобразование полученных магнитно-резонансных данных антенных элементов из k-пространства в пространство изображения, например, с помощью обратного преобразования Фурье, и объединение результирующих данных изображения антенных элементов.
Магнитно-резонансные данные, полученные каждым антенным элементом, моделируют с использованием реконструированных объединенных данных изображения. Моделирование включает в себя преобразование реконструированных объединенных данных изображения из пространства изображения в k-пространство, например, с помощью преобразования Фурье.
Для каждого антенного элемента системы МРТ определяют коэффициент фазовой коррекции для полученных магнитно-резонансных данных соответствующего антенного элемента. Определение включает в себя вычисление разности фаз между полученными магнитно-резонансными данными и смоделированными магнитно-резонансными данными соответствующего антенного элемента. Наконец, полученные магнитно-резонансные данные каждого антенного элемента корректируют с помощью коэффициента фазовой коррекции, определенного для соответствующего антенного элемента.
Следует понимать, что один или более из вышеуказанных вариантов осуществления изобретения могут быть объединены постольку, поскольку они не являются взаимоисключающими.
Краткое описание чертежей
Ниже будут описаны предпочтительные варианты осуществления изобретения только в качестве примера и со ссылкой на чертежи, на которых:
На фиг. 1 приведен пример системы магнитно-резонансной томографии;
На фиг. 2 приведен пример способа работы системы магнитно-резонансной томографии с фиг. 1;
На фиг. 3 представлен итерационный вариант способа, показанного на фиг. 2;
На фиг. 4 показана фазовая коррекция в связи с B0 флуктуациями, связанными с дыхательным движением; и
На фиг. 5А и 5В показаны артефакты, которые могут быть вызваны B0 флуктуациями.
Элементы с одинаковыми номерами на этих фигурах являются эквивалентными элементами или выполняют ту же функцию. Элементы, которые обсуждались ранее, не обязательно будут обсуждаться на последующих фигурах, если их функция эквивалентна.
Осуществление изобретения
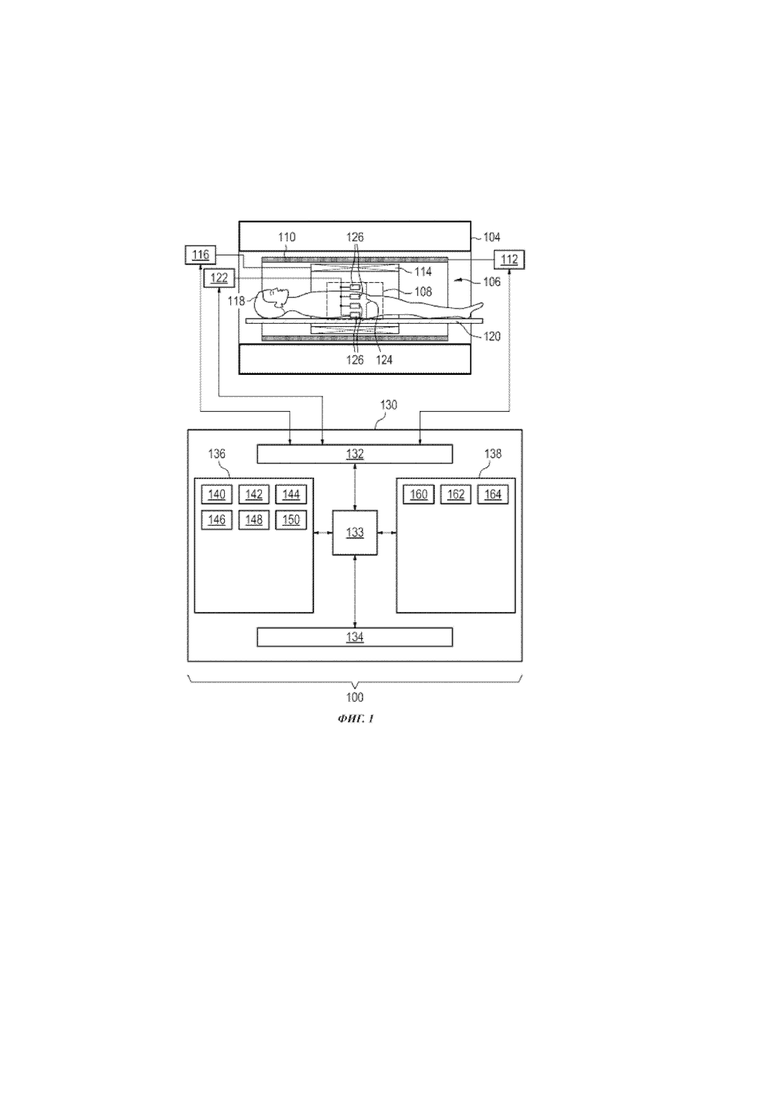
На фиг. 1 приведен пример системы 100 магнитно-резонансной томографии. Система 100 магнитно-резонансной томографии содержит главный магнит 104. Магнит 104 представляет собой сверхпроводящий магнит 104 цилиндрического типа с проходящим сквозь него отверстием 106. Также возможно использование магнитов другого типа, например, также возможно использование разделенного цилиндрического магнита и так называемого открытого магнита. Разделенный цилиндрический магнит аналогичен стандартному цилиндрическому магниту, за исключением того, что криостат разделен на две секции для обеспечения доступа к изоплоскости магнита, такие магниты могут, например, использоваться в сочетании с терапией пучком заряженных частиц. Открытый магнит имеет две магнитные секции, одна над другой с промежутком между ними, достаточно большим, чтобы вместить пациента: расположение двух секций аналогично расположению катушки Гельмгольца. Открытые магниты популярны, потому что пациент в них менее ограничен. Внутри криостата цилиндрического магнита находится совокупность сверхпроводящих катушек. Внутри отверстия 106 цилиндрического магнита 104 находится зона 108 визуализации, в которой магнитное поле достаточно сильное и однородное для проведения магнитно-резонансной томографии.
Внутри отверстия 106 магнита также находится набор градиентных катушек 110 магнитного поля, которые используют для получения магнитно-резонансных данных с целью пространственного кодирования магнитных спинов в зоне 108 визуализации магнита 104. Градиентные катушки 110 магнитного поля подключены к источнику 112 питания градиентных катушек магнитного поля. Предполагается, что градиентные катушки 110 магнитного поля являются типичными градиентными катушками. Как правило, градиентные катушки 110 магнитного поля содержат три отдельных набора катушек для пространственного кодирования в трех ортогональных пространственных направлениях. Источник питания градиентных катушек магнитного поля подает ток на градиентные катушки магнитного поля. Ток, подаваемый на градиентные катушки 110 магнитного поля, управляется как функция времени и может быть линейным или импульсным.
Внутри отверстия 106 магнита 104 находится катушка 114 для тела. Катушка 114 для тела может быть, например, квадратурной катушкой для тела (QBC, от англ. quadrature body coil) или катушкой для всего тела. Катушка 114 для тела показана подключенной к приемопередатчику 116. В некоторых вариантах осуществления катушка 114 для тела может быть катушкой для всего тела и подключена к радиочастотному усилителю катушки для всего тела и/или приемнику, однако это не показано в данном примере. Если и передатчик, и приемник 116 подключены к катушке 114 для всего тела, то может быть предусмотрено средство для переключения между режимами передачи и приема. Например, может быть использована схема с pin-диодом для выбора режима передачи или приема. Опора 120 пациента поддерживает пациента 118 в зоне визуализации.
Приемопередатчик 122 показан подключенным к радиочастотной системе, содержащей магнитно-резонансную томографическую катушку 124. В данном примере магнитно-резонансная томографическая катушка 124 представляет собой поверхностную катушку, содержащую несколько антенных элементов 126. Приемопередатчик 122 выполнен с возможностью отправки и приема отдельных радиочастотных сигналов на отдельные антенные элементы 126. В данном примере приемопередатчик 116 и приемопередатчик 122 показаны как отдельные блоки. Однако в других примерах блоки 116 и 122 могут быть объединены.
Приемопередатчик 116, приемопередатчик 122 и источник 112 питания градиентных катушек магнитного поля показаны подключенными к аппаратному интерфейсу 132 компьютера 130. Компьютер 130 также показан включающим в себя процессор 133, предназначенный для работы с целью исполнения машиночитаемых инструкций. Компьютер 130 также показан включающим в себя пользовательский интерфейс 134, компьютерное хранилище 136 и компьютерную память 138, которые все доступны и подключены к процессору 133.
Компьютерное хранилище 136 показано содержащим одну или более из импульсных последовательностей 140. Импульсные последовательности 140 представляют собой инструкции или данные, которые могут быть преобразованы в инструкции, позволяющие процессору 133 получать магнитно-резонансные данные с помощью системы 100 магнитно-резонансной томографии.
Компьютерное хранилище также показано содержащим магнитно-резонансные данные 142, полученные антенными элементами 126. Компьютерное хранилище также показано содержащим реконструированные объединенные данные 144 изображения. Реконструированные объединенные данные 144 изображения вычислены с помощью полученных магнитно-резонансных данных 142. Это может быть выполнено с помощью нескольких различных методик. Например, это может быть сделано с использованием протокола SENSE.
Компьютерное хранилище 136 также показано содержащим смоделированные магнитно-резонансные данные 146, смоделированные с помощью реконструированных объединенных данных 144 изображения. В зависимости от используемой методики реконструкции данных 144 в пространстве изображения и моделирования данных 146 набор чувствительностей катушек набора антенных элементов 126 также может быть обеспечен компьютерным хранилищем 136.
Компьютерное хранилище может также включать в себя определение набора точек в Фурье пространстве, которые используют в качестве точек для усреднения полученных магнитно-резонансных данных 142 и смоделированных магнитно-резонансных данных 146.
Компьютерное хранилище 136 также показано содержащим скорректированные магнитно-резонансные данные 148, которые вычислены из полученных магнитно-резонансных данных 142 с использованием смоделированных магнитно-резонансных данных 146 для определения коэффициента фазовой коррекции для полученных магнитно-резонансных данных 142. Наконец, компьютерное хранилище 136 показано содержащим диагностическое магнитно-резонансное изображение 150, которое реконструируют с помощью скорректированных магнитно-резонансных данных 148. Диагностическое магнитно-резонансное изображение 150 может быть реконструировано, например, на основе магнитно-резонансной методики параллельной визуализации с использованием скорректированных магнитно-резонансных данных 148. В зависимости от магнитно-резонансной методики параллельной визуализации, используемой для реконструкции диагностического магнитно-резонансного изображения 150, например, может быть использован набор чувствительностей катушек антенных элементов 126.
В некоторых примерах катушка 114 для тела отсутствует. В других примерах катушка 114 для тела используется для получения части магнитно-резонансных данных 142.
Компьютерная память 138 показана выполненной в виде модуля 160 управления. Модуль 160 управления содержит компьютерно-исполняемый код или инструкции, которые позволяют процессору 133 управлять работой и функционированием системы магнитно-резонансной томографии. Например, модуль 160 управления может работать совместно с импульсными последовательностями 140 для получения различных магнитно-резонансных данных. Компьютерная память 138 также показана содержащей модуль 162 преобразования Фурье и реконструкции изображения и модуль 164 фазовой коррекции. Эти два модуля 162, 164 содержат компьютерно-исполняемый код, который позволяет процессору 133 выполнять один или более способов, показанных на фиг. 2-3. Кроме того, в зависимости от используемого способа, модуль 164 фазовой коррекции может также выполнять усреднение магнитно-резонансных данных 142, 146.
На фиг. 2 приведена поточная диаграмма, иллюстрирующая способ работы системы 100 магнитно-резонансной томографии, показанной на фиг. 1. На шаге 200 магнитно-резонансные данные 142 получают из зоны 108 визуализации каждым из антенных элементов 126. Например, модуль 160 управления может работать совместно с импульсными последовательностями 140 для получения магнитно-резонансных данных 142. В зависимости от катушки 114 для тела, магнитно-резонансные данные могут быть также получены катушкой для тела, т.е. катушка для тела может обеспечивать функциональные возможности антенного элемента. На шаге 202 объединенные данные 144 изображения реконструируют из магнитно-резонансных данных 142. Полученные магнитно-резонансные данные 142 антенных элементов 126 преобразуют из k-пространства в пространство изображения с помощью обратного преобразования Фурье. Преобразование может быть выполнено с помощью модуля 162 преобразования. Результирующие данные изображения двух и более антенных элементов 126 в пространстве изображения объединяют для получения объединенных данных 146 изображения. В соответствии с некоторыми вариантами осуществления объединяют результирующие данные изображения всех антенных элементов 126. Например, реконструируют 3D-изображение. В соответствии с еще одним примером, реконструируют одно или более 2D-изображений, например, пакет 2D-изображений. Для реконструкции и/или объединения изображений может быть использован протокол параллельной визуализации, например протокол SENSE. В соответствии с некоторыми вариантами осуществления посредством каждого антенного элемента 126 получают несколько наборов магнитно-резонансных данных 142, причем каждый набор магнитно-резонансных данных 142 получают в разное время. Преобразование может включать в себя усреднение по времени полученных магнитно-резонансных данных 142 каждого антенного элемента 126, например, по наборам магнитно-резонансных данных 142 соответствующего антенного элемента 126, и преобразование результата из k-пространства в пространство изображения, или вначале преобразование в пространство изображения с последующим усреднением по времени.
На шаге 204 магнитно-резонансные данные, полученные каждым антенным элементом, моделируют с использованием реконструированных объединенных данных 144 изображения. Реконструированные объединенные данные 144 изображения преобразуют модулем 162 преобразования из пространства изображения в k-пространство с помощью преобразования Фурье. В соответствии с некоторыми вариантами осуществления все измерения пространства изображения преобразуют в измерения k-пространства, т.е. выполняют полное изменение основания, преобразуя все координаты k-пространства. В соответствии с другими вариантами осуществления преобразуют только поднабор координат k-пространства, в то время как остальные координаты k-пространства остаются непреобразованными. Таким образом, реконструированные объединенные данные 144 изображения преобразуют в гибридное пространство, т.е. пространство, содержащее, например, по меньшей мере одно измерение пространства изображения и одно или более измерений k-пространства. Смоделированные магнитно-резонансные данные 146 могут быть результатом одного из вышеперечисленных преобразований.
На шаге 206 для каждого антенного элемента определяют коэффициент фазовой коррекции с помощью модуля 164 фазовой коррекции. Определение включает в себя вычисление разности фаз между полученными магнитно-резонансными данными 142 и смоделированными магнитно-резонансными данными 146 соответствующего антенного элемента. В соответствии с некоторыми вариантами осуществления разность фаз может быть рассчитана путем вычисления соотношения полученных магнитно-резонансных данных 142 и смоделированных магнитно-резонансных данных 146, например, для каждой точки данных в k-пространстве или гибридном пространстве. В соответствии с другими вариантами осуществления вычисляют произведение полученных магнитно-резонансных данных 142 и комплексно сопряженного значения смоделированных магнитно-резонансных данных 146, например, для каждой точки данных в k-пространстве или гибридном пространстве. В соответствии с другими вариантами осуществления, соотношение или произведение усредняют. Например, полученные магнитно-резонансные данные 142 и смоделированные магнитно-резонансные данные 146 усредняют по направлению считывания, т.е. по kx в случае полного k-пространства или по x в случае гибридного пространства. В соответствии с другими примерами, усредняют по каналам, т.е. магнитно-резонансные данные 146, смоделированные для различных антенных элементов 126, а также магнитно-резонансные данные 142, полученные различными антенными элементами 126, усредняют по антенным элементам. В соответствии с другими вариантами осуществления, усредняют по времени. Усредняют магнитно-резонансные данные 142, 146 точек k-пространства, для которых были получены магнитно-резонансные данные 142 в предварительно заданном временном интервале. В соответствии с некоторыми вариантами осуществления, как полученные магнитно-резонансные данные 142, так и смоделированные магнитно-резонансные данные 146, которые усредняют, могут быть равновзвешенными, или точкам данных могут быть присвоены разные весовые коэффициенты. Например, гауссово распределение весовых коэффициентов может быть присвоено точкам данных при усреднении. Коэффициент фазовой коррекции может быть определен для каждой точки данных, содержащейся в полученных магнитно-резонансных данных 142. Однако усреднение может привести к равным коэффициентам фазовой коррекции для одной или более точек данных, содержащихся в полученных магнитно-резонансных данных 142.
На шаге 208 коэффициент фазовой коррекции, вычисленный на шаге 206, используется модулем 164 фазовой коррекции для коррекции полученных магнитно-резонансных данных 142 каждого антенного элемента. Каждая точка данных, содержащаяся в полученных магнитно-резонансных данных 142, может быть скорректирована с помощью коэффициента фазовой коррекции, вычисленного для соответствующей точки данных, в результате чего получаются скорректированные магнитно-резонансные данные 148.
На фиг. 3 показана поточная диаграмма итеративной реализации способа v 2. После коррекции полученных магнитно-резонансных данных 142, т.е. вычисления скорректированных магнитно-резонансных данных 148, на шаге 210 проверяют, удовлетворяется ли предварительно заданный критерий завершения. Критерий завершения, например, может потребовать, чтобы коэффициент фазовой коррекции, определенный на шаге 206, был меньше предварительно заданного порогового значения или чтобы было достигнуто предварительно заданное максимальное количество шагов итерации. В случае, если коэффициент фазовой коррекции не меньше предварительно заданного порогового значения, таким образом удовлетворяя критерий завершения, способ продолжают на шаге 212. На шаге 212 полученные магнитно-резонансные данные 142 для дальнейшей процедуры заменяют на скорректированные магнитно-резонансные данные 146. Другими словами, шаги с 201 по 208 способа повторяют со скорректированными магнитно-резонансными данными 146 вместо полученных магнитно-резонансных данных 142. После повторения, в результате которого получают новые скорректированные магнитно-резонансные данные, на шаге 210 для новых скорректированных магнитно-резонансных данных проверяют, удовлетворен ли критерий завершения, т.е. является ли коэффициент фазовой коррекции, определяемый при повторении шагов 201-208, меньше, чем предварительно заданное пороговое значение. Таким образом, шаги с 202 по 208 итерационно повторяют до тех пор, пока не будет определен коэффициент коррекции, меньший, чем предварительно заданное пороговое значение. В случае множества коэффициентов фазовой коррекции, когда каждый коэффициент фазовой коррекции вычисляется для одной из точек данных, содержащихся в полученных магнитно-резонансных данных 142, шаги 202 могут повторяться до тех пор, пока каждый из коэффициентов фазовой коррекции не станет меньше порогового значения.
В случае, если на шаге 210 будет определено, что критерий завершения удовлетворен, способ может быть продолжен на шаге 214. На шаге 214 последние вычисленные скорректированные магнитно-резонансные данные используют для реконструкции диагностического магнитно-резонансного изображения 150. Диагностическое магнитно-резонансное изображение 150 может быть реконструировано по последним вычисленным скорректированным магнитно-резонансным данным с использованием протокола параллельной визуализации, например протокола SENSE.
На фиг. 4 показана диаграмма 500, иллюстрирующая взаимосвязь оцененной фазовой коррекции 502 с сигналом дыхательного сильфона 504, т.е. дыхательным движением пациента. Физиологические источники, например, дыхательное движение, могут привносить смещения или флуктуации главного магнитного поля, т.е. B0 нерезонансного поля, что может оказать значительное влияние на качество изображения. Они могут, например, привести к появлению паразитных изображений и других артефактов. Как показано на диаграмме 500, коэффициент 502 фазовой коррекции, определяемый способом с фиг. 2 и 3, в случае главного магнитного поля, содержащего неоднородности, вызванные дыхательными движениями пациента, может соответствовать соответствующему дыхательному движению 504. Поэтому фазовые артефакты, вызванные дыхательными движениями, могут быть эффективно скорректированы с помощью описанного выше способа коррекции на основе потока данных, например, с учетом фиг. 2 и 3.
На фиг. 5A и 5B показано влияние на оценку фазовой коррекции на T2*-взвешенном градиент-эхо изображении мозга. На фиг. 5А показано изображение 600 мозга без коррекции при TE=26,6 мс. На фиг. 5B показано изображение мозга 602 с коррекцией магнитуды при TE=26,6 мс. Другими словами, на фиг. 5А показано диагностическое магнитно-резонансное изображение, которое было реконструировано с использованием нескорректированных магнитно-резонансных данных, полученных антенными элементами. На фиг. 5В показано диагностическое магнитно-резонансное изображение, которое было реконструировано с использованием скорректированных магнитно-резонансных данных, вычисленных по одному или более приведенным выше вариантам осуществления. Артефакты, связанные с B0-флуктуациями, представлены на фиг. 5А в виде пульсаций среднего диапазона и модуляций интенсивности, некоторые из которых отмечены стрелками 604. Эти артефакты могут быть эффективно скорректированы с помощью подхода на основе потока данных для коррекции артефактов, зависящих от фазы, как описано выше. Это видно по скорректированному изображению 602 на фиг. 5В, на котором отсутствуют артефакты 604, указанные на нескорректированном изображении 600.
Хотя изобретение было подробно проиллюстрировано и описано на чертежах и в предшествующем описании, такие иллюстрации и описание следует считать исключительно иллюстративными или представленными в качестве примера, но не ограничительными; изобретение не ограничено раскрытыми вариантами осуществления.
На основе изучения чертежей, раскрытия и приложенной формулы изобретения специалистами в данной области техники могут быть поняты и осуществлены другие варианты раскрытых вариантов осуществления при реализации настоящего изобретения. В формуле изобретения слово "содержащий" не исключает других элементов или шагов, а использование единственного числа не исключает множественности. Один процессор или другое устройство может выполнять функции нескольких элементов, указанных в формуле изобретения. Тот факт, что определенные меры указаны во взаимно различающихся зависимых пунктах формулы, не указывает на то, что комбинация этих мер не может быть использована для получения преимущества. Компьютерная программа может храниться/распространяться на подходящем носителе, например, оптическом носителе или твердотельном носителе, поставляемом вместе с другим оборудованием или в составе другого оборудования, а также может распространяться в других формах, например, через сеть Интернет или другие проводные или беспроводные телекоммуникационные системы. Любые ссылочные обозначения в формуле изобретения не должны толковаться как ограничивающие объем изобретения.Список ссылочных обозначений
100 система магнитно-резонансной томографии
104 главный магнит
106 отверстие магнита
108 зона визуализации
110 градиентные катушки магнитного поля
112 источник питания градиентной катушки магнитного поля
114 катушка для тела
116 приемопередатчик
118 пациент
120 опора пациента
122 приемопередатчик
124 магнитно-резонансная томографическая катушка
126 антенный элемент
130 компьютер
132 аппаратный интерфейс
134 пользовательский интерфейс
136 компьютерное хранилище
138 компьютерная память
140 импульсные последовательности
142 полученные магнитно-резонансные данные
144 реконструированные объединенные данные изображения
146 смоделированные магнитно-резонансные данные
148 скорректированные магнитно-резонансные данные
150 диагностическое магнитно-резонансное изображение
160 модуль управления
162 модуль преобразования Фурье и реконструкции изображения
164 модуль фазовой коррекции
500 диаграмма
502 фазовая коррекция
504 дыхательный сигнал
600 нескорректированное изображение мозга
602 скорректированное изображение мозга
604 артефакт



Изобретение относится к системе (100) МРТ с РЧ системой для получения магнитно-резонансных данных (142). Радиочастотная система содержит набор антенных элементов (126). Система (100) МРТ дополнительно содержит процессор для управления системой (100) МРТ. Получают магнитно-резонансные данные. Реконструируют объединенные данные (144) изображения. Реконструкция включает в себя преобразование полученных магнитно-резонансных данных (142) из k-пространства в пространство изображения и объединение результирующих данных изображения. Для каждого элемента антенны (126) магнитно-резонансные данные (146) моделируют с помощью реконструированных объединенных данных (144) изображения. Моделирование включает в себя преобразование реконструированных объединенных данных (144) изображения из пространства изображения в k-пространство. Определяют коэффициент фазовой коррекции. Определение включает в себя вычисление разности фаз между полученными магнитно-резонансными данными (142) и смоделированными магнитно-резонансными данными (146). Полученные магнитно-резонансные данные (142) корректируют с помощью коэффициента фазовой коррекции. Таким образом, изобретение позволяет скорректировать фазовые погрешности, вызванные, например, движением пациента, таким как дыхание, B0-нерезонансным полем и т.п. 3 н. и 11 з.п. ф-лы, 5 ил.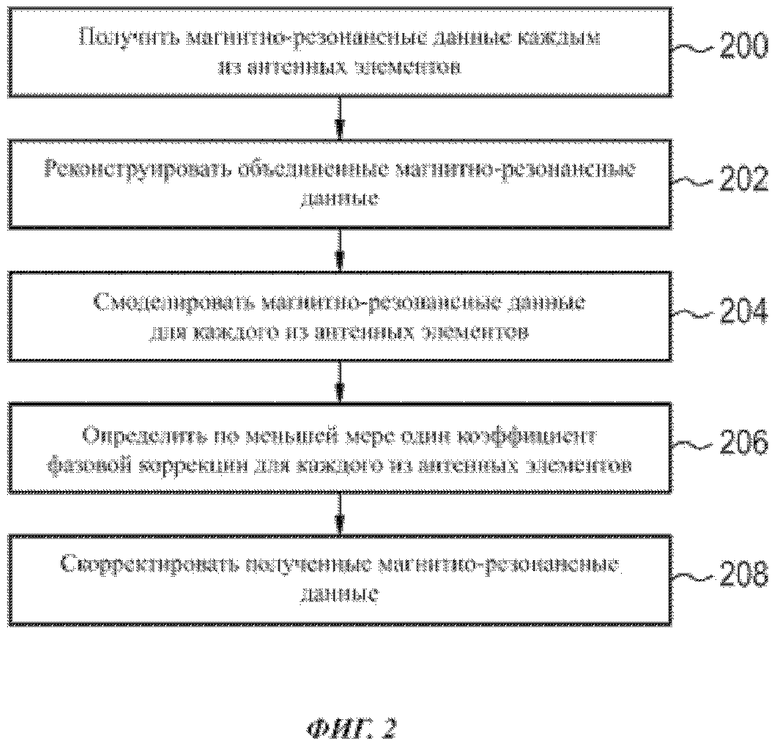
1. Система (100) магнитно-резонансной томографии, содержащая:
- главный магнит (104) для генерирования главного магнитного поля в зоне (108) визуализации,
- градиентную систему магнитного поля для генерирования пространственно-зависимого градиентного магнитного поля в зоне (108) визуализации,
- радиочастотную систему, содержащую набор антенных элементов (126), каждый из которых выполнен с возможностью получения магнитно-резонансных данных (142) из зоны (108) визуализации,
- память (138) для хранения машино-исполняемых инструкций и команд (140) импульсной последовательности, причем команды (140) импульсной последовательности выполнены с возможностью управления системой (100) магнитно-резонансной томографии для получения магнитно-резонансных данных (142) из зоны (108) визуализации,
- процессор для управления системой (100) магнитно-резонансной томографии, причем исполнение машино-исполняемых инструкций приводит к тому, что процессор управляет системой (100) магнитно-резонансной томографии для:
- получения магнитно-резонансных данных (142) из зоны (108) визуализации каждым из антенных элементов (126),
- реконструкции объединенных данных (144) изображения, причем реконструкция включает в себя преобразование полученных магнитно-резонансных данных (142) антенных элементов (126) из k-пространства в пространство изображения и объединение результирующих данных изображения антенных элементов (126) с использованием чувствительностей соответствующих антенных элементов,
- моделирования магнитно-резонансных данных (146), полученных каждым антенным элементом (126), с помощью реконструированных объединенных данных (144) изображения, причем моделирование включает в себя преобразование реконструированных объединенных данных (144) изображения из пространства изображения в k-пространство,
- определения для каждого антенного элемента (126) коэффициента фазовой коррекции для полученных магнитно-резонансных данных (142) соответствующего антенного элемента (126), причем определение включает в себя вычисление разности фаз между полученными магнитно-резонансными данными (142) и смоделированными магнитно-резонансными данными (146) соответствующего антенного элемента (126),
- коррекции полученных магнитно-резонансных данных (142) каждого антенного элемента (126) с помощью коэффициента фазовой коррекции, определенного для соответствующего антенного элемента (126).
2. Система (100) магнитно-резонансной томографии по п. 1, в которой предусмотрено итеративное повторение реконструкции объединенных данных (144) изображения, моделирования магнитно-резонансных данных (146), определения коэффициента фазовой коррекции и коррекции полученных магнитно-резонансных данных (142) с помощью скорректированных магнитно-резонансных данных (148) для последующей коррекции скорректированных магнитно-резонансных данных (148) до тех пор, пока не будет удовлетворен предварительно заданный критерий завершения.
3. Система (100) магнитно-резонансной томографии по любому из предшествующих пунктов, в которой предусмотрено получение каждым антенным элементом (126) нескольких наборов магнитно-резонансных данных (142) из зоны (108) визуализации, причем получение каждого из указанных наборов предусмотрено в разное время, причем преобразование полученных магнитно-резонансных данных (142) антенных элементов из k-пространства в пространство изображения включает в себя:
- для каждого антенного элемента (126) усреднение по времени полученных магнитно-резонансных данных (142) наборов соответствующих антенных элементов (126) и преобразование результирующих магнитно-резонансных данных из k-пространства в пространство изображения или
- для каждого антенного элемента (126) преобразование магнитно-резонансных данных (142) наборов соответствующих антенных элементов (126) из k-пространства в пространство изображения и усреднение результирующих магнитно-резонансных данных по времени.
4. Система (100) магнитно-резонансной томографии по любому из предшествующих пунктов, в которой для каждой точки k-пространства, содержащейся в полученных магнитно-резонансных данных (142), предусмотрено определение индивидуального коэффициента фазовой коррекции и его использование для коррекции магнитно-резонансных данных, полученных для соответствующей точки,
причем определение индивидуальных коэффициентов фазовой коррекции включает в себя вычисление для каждой из точек в k-пространстве индивидуальной разности фаз между магнитно-резонансными данными, полученными для соответствующей точки, и магнитно-резонансными данными (146), смоделированными для соответствующей точки.
5. Система (100) магнитно-резонансной томографии по любому из пп. 1-3, в которой коэффициент фазовой коррекции представляет собой усредненный коэффициент фазовой коррекции, определенный для поднабора полученных магнитно-резонансных данных (142) и предназначенный для коррекции полученных магнитно-резонансных данных, содержащихся в указанном поднаборе, причем определение усредненного коэффициента фазовой коррекции включает в себя вычисление усредненной разности фаз путем усреднения по разностям фаз, вычисленным между полученными магнитно-резонансными данными, содержащимися в указанном поднаборе и смоделированными магнитно-резонансными данными (146).
6. Система (100) магнитно-резонансной томографии по п. 5, в которой поднабор включает в себя первую выборку полученных магнитно-резонансных данных (142), которые расположены на линии вдоль направления считывания в k-пространстве таким образом, чтобы усредненная разность фаз была усреднена по направлению считывания.
7. Система (100) магнитно-резонансной томографии по любому из пп. 5, 6, в которой поднабор включает в себя вторую выборку полученных магнитно-резонансных данных (142) разных антенных элементов (126), полученных для одной и той же точки в k-пространстве так, чтобы усредненная разность фаз была усреднена по антенным элементам (126).
8. Система (100) магнитно-резонансной томографии по любому из пп. 5-7, в которой поднабор включает в себя третью выборку полученных магнитно-резонансных данных (142), полученных в предварительно заданном временном интервале таким образом, чтобы усредненная разность фаз была усреднена по временному интервалу.
9. Система (100) магнитно-резонансной томографии по любому из пп. 5-8, в которой предусмотрено присвоение полученным магнитно-резонансным данным (142), содержащимся в поднаборе, весовых коэффициентов, предназначенных для вычисления усредненной разности фаз.
10. Система (100) магнитно-резонансной томографии по любому из предшествующих пунктов, в которой преобразование реконструированных объединенных данных (144) изображения из пространства изображения в k-пространство предусмотрено для каждого измерения пространства изображения.
11. Система (100) магнитно-резонансной томографии по любому из пп. 1-9, в которой преобразование реконструированных объединенных данных (144) изображения из пространства изображения в k-пространство предусмотрено для каждого измерения пространства изображения, за исключением поднабора измерений пространства изображения, который остается непреобразованным, так чтобы результирующие смоделированные магнитно-резонансные данные (146) находились в гибридном пространстве, включающем в себя поднабор измерений пространства изображения и одно или более измерений k-пространства,
причем для определения коэффициента фазовой коррекции и коррекции полученных магнитно-резонансных данных (142) предусмотрено преобразование полученных магнитно-резонансных данных (142) каждого антенного элемента (126) из k-пространства в пространство изображения для поднабора измерений пространства изображения таким образом, чтобы результирующие преобразованные полученные магнитно-резонансные данные (142) находились в гибридном пространстве, причем определение коэффициента фазовой коррекции и коррекция полученных магнитно-резонансных данных (142) предусмотрены в гибридном пространстве с помощью преобразованных полученных магнитно-резонансных данных (142).
12. Система (100) магнитно-резонансной томографии по любому из предшествующих пунктов, в которой для получения магнитно-резонансных данных предусмотрено использование переплетенной схемы выборки в k-пространстве, при этом в соответствии с переплетенной схемой выборки получение магнитно-резонансных данных из соседних точек в k-пространстве, содержащихся в полученных магнитно-резонансных данных (142), не предусмотрено в прямой последовательности.
13. Машиночитаемый носитель, содержащий машино-исполняемые инструкции, для исполнения процессором, управляющим системой (100) магнитно-резонансной томографии, причем система (100) магнитно-резонансной томографии содержит:
- главный магнит (104) для генерирования главного магнитного поля в зоне (108) визуализации,
- градиентную систему магнитного поля для генерирования пространственно-зависимого градиентного магнитного поля в зоне (108) визуализации,
- радиочастотную систему, содержащую множество антенных элементов (126), каждый из которых выполнен с возможностью получения магнитно-резонансных данных (142) из зоны (108) визуализации,
- память (138) для хранения машино-исполняемых инструкций и команд (140) импульсной последовательности, причем команды (140) импульсной последовательности выполнены с возможностью управления системой (100) магнитно-резонансной томографии для получения магнитно-резонансных данных (142) из зоны (108) визуализации,
причем исполнение машино-исполняемых инструкций приводит к тому, что процессор управляет системой (100) магнитно-резонансной томографии для:
- получения магнитно-резонансных данных (142) из зоны (108) визуализации каждым из антенных элементов (126),
- реконструкции объединенных данных (144) изображения, причем реконструкция включает в себя преобразование полученных магнитно-резонансных данных антенных элементов (126) из k-пространства в пространство изображения и объединение результирующих данных изображения антенных элементов (126) с использованием чувствительностей соответствующих антенных элементов,
- моделирования магнитно-резонансных данных (146), полученных каждым антенным элементом (126), с помощью реконструированных объединенных данных (144) изображения, причем моделирование включает в себя преобразование реконструированных объединенных данных (144) изображения из пространства изображения в k-пространство,
- определения для каждого антенного элемента (126) коэффициента фазовой коррекции для полученных магнитно-резонансных данных (142) соответствующего антенного элемента (126), причем определение включает в себя вычисление разности фаз между полученными магнитно-резонансными данными (142) и смоделированными магнитно-резонансными данными (146) соответствующего антенного элемента (126),
- коррекции полученных магнитно-резонансных данных (142) каждого антенного элемента (126) с помощью коэффициента фазовой коррекции, определенного для соответствующего антенного элемента (126).
14. Способ работы системы (100) магнитно-резонансной томографии, причем система (100) магнитно-резонансной томографии содержит:
- главный магнит (104) для генерирования главного магнитного поля в зоне (108) визуализации,
- градиентную систему магнитного поля для генерирования пространственно-зависимого градиентного магнитного поля в зоне (108) визуализации,
- радиочастотную систему, содержащую множество антенных элементов (126), каждый из которых выполнен с возможностью получения магнитно-резонансных данных (142) из зоны (108) визуализации,
- память (138) для хранения машино-исполняемых инструкций и команд (140) импульсной последовательности, причем команды (140) импульсной последовательности выполнены с возможностью управления системой (100) магнитно-резонансной томографии для получения магнитно-резонансных данных (142) из зоны (108) визуализации, причем способ включает в себя следующие этапы:
- получение магнитно-резонансных данных (142) из зоны (108) визуализации каждым из антенных элементов (126),
- реконструкция объединенных данных (144) изображения, причем реконструкция включает в себя преобразование полученных магнитно-резонансных данных (142) антенных элементов (126) из k-пространства в пространство изображения и объединение результирующих данных изображения антенных элементов (126) с использованием чувствительностей соответствующих антенных элементов,
- моделирование магнитно-резонансных данных, полученных каждым антенным элементом (126), с помощью реконструированных объединенных данных (144) изображения, причем моделирование включает в себя преобразование реконструированных объединенных данных (144) изображения из пространства изображения в k-пространство,
- определение для каждого антенного элемента (126) коэффициента фазовой коррекции для полученных магнитно-резонансных данных (142) соответствующего антенного элемента (126), причем определение включает в себя вычисление разности фаз между полученными магнитно-резонансными данными (142) и смоделированными магнитно-резонансными данными (146) соответствующего антенного элемента (126),
- коррекция полученных магнитно-резонансных данных (142) каждого антенного элемента (126) с помощью коэффициента фазовой коррекции, определенного для соответствующего антенного элемента (126).
| WO 2011106649 A1, 01.09.2011 | |||
| US 2014073904 A1, 13.03.2014 | |||
| WO 2014087270 A2, 12.06.2014 | |||
| US 2015302616 A1, 22.10.2015 | |||
| US 2012002858 A1, 05.01.2012 | |||
| ПОДАВЛЕНИЕ АРТЕФАКТА ПРИ МНОГОКАТУШЕЧНОЙ МАГНИТНО-РЕЗОНАНСНОЙ ВИЗУАЛИЗАЦИИ | 2007 |
|
RU2434238C2 |

