Предыдущие заявки
Настоящая заявка является продолжением предварительной заявки US 61/127,675, поданной 15 мая 2008 года.
Область техники
Настоящее изобретение относится в целом к системам управления поездом и, в частности, к системе управления поездом, которая сочетает определенные структуры технологии локомотивной сигнализации со структурами, используемыми в основанной на обмене данными технологии управления поездом (СВТС-технологии). Гибридная система управления поездом использует традиционные путевые фиксированные блок-участки с соответствующими управляющими устройствами локомотивной сигнализации, а также интеллектуальное монтируемое на транспортном средстве СВТС-оборудование. Управляющие устройства локомотивной сигнализации генерируют дискретные команды скорости, которые передаются в путевые рельсы различных блок-участков локомотивной сигнализации. В свою очередь, интеллектуальное монтируемое на транспортном средстве СВТС-устройство определяет местоположение соответствующего поезда и генерирует границу разрешенного движения (MAL) на основании команд скорости, принимаемых от путевых устройств локомотивной сигнализации.
Уровень техники
Технология локомотивной сигнализации хорошо известна и развилась из фиксированного блок-участка и путевой сигнализации. Как правило, система локомотивной сигнализации включает путевые элементы, которые генерируют дискретные команды скорости на основании ряда факторов, к числу которых относятся опознавательные данные поезда, гражданские ограничения скорости, характеристики поезда и данные о геометрии путей. Команды скорости подаются в путевые рельсы различных блок-участков локомотивной сигнализации и принимаются поездами, работающими на этих блок-участках, через приемные катушки. Система локомотивной сигнализации также включает монтируемые на транспортном средстве устройства, которые предоставляют информацию о скорости машинистам поезда, и которые обеспечивают, чтобы действительная скорость поезда не превышала скорость, принимаемую от путевого оборудования.
СВТС-технология тоже известна в уровне техники и получила популярность в качестве технологии выбора новых транзитных свойств. СВТС-система основана на непрерывном двустороннем обмене данными между интеллектуальными поездами и путевыми зональными регуляторами. Интеллектуальный поезд определяет собственное местоположение и генерирует и исполняет безопасный скоростной график. Имеется ряд структур, известных в уровне техники, позволяющих поезду определять собственное местоположение независимо от рельсовых цепей. Одна такая структура использует пассивные передатчики, которые расположены на путях между рельсами для предоставления отсчетного местоположения приближающимся к ним поездам. Используя систему измерения скорости, такую как тахометр, бортовой компьютер ответственного назначения непрерывно вычисляет местоположение и скорость поезда между передатчиками.
Работа СВТС основана на принципе движущегося блок-участка, который требует, чтобы поезда в некоторой области непрерывно сообщали их местоположение зональному регулятору. В свою очередь, зональный регулятор передает всем поездам в этой области набор данных, который содержит топографию путей (т.е. уклоны, неровности, повороты, возвышенности и т.д.), гражданские ограничения скорости и местоположения путевого сигнального оборудования. Зональный регулятор, кроме того, отслеживает все поезда в своей области, вычисляет и передает каждому поезду границу разрешенного движения. Разрешенное движение обычно ограничено находящимся впереди поездом; путевым сигналом, отображающим показание к остановке; выходом из строя рельсовой цепи; концом путей и т.п. При приеме границы разрешенного движения бортовой компьютер генерирует скоростной график (скорость/расстояние по кривой), в котором учитываются граница разрешенного движения, гражданские ограничения скорости, топография путей и тормозные характеристики поезда. Бортовой компьютер также обеспечивает, чтобы действительная скорость поезда не превышала безопасный предел скорости.
СВТС имеет ряд преимуществ перед технологией локомотивной сигнализации, к числу которых относятся более короткие интервалы между поездами, исполнение временных ограничений скорости и обеспечение возможности работы на одной и той же линии поездов с разными тяговыми и тормозными характеристиками.
Несмотря на то, что выгоды и преимущества СВТС хорошо известны, трудно осуществить переход от установки локомотивной сигнализации на установку СВТС. Кроме того, при удлинении существующей линии, управляемой локомотивной сигнализацией, транзитные или путевые свойства обычно ограничены одним выбором, а именно, использованием той же самой технологии управления поездом, которая используется в существующей линии. Помимо этого, является желательным стандартизировать человеко-машинный интерфейс, обеспечиваемый системами локомотивной сигнализации и СВТС. Далее, желательно получить некоторый уровень оперативной совместимости между локомотивной сигнализацией и СВТС. Настоящее изобретение предлагает структуру, которая способствует переходу от локомотивной сигнализации к СВТС; позволяет использовать технологию СВТС на удлинении линии, которая управляется локомотивной сигнализацией; предоставляет человеко-машинный интерфейс для систем локомотивной сигнализации, который основан на формате «расстояние, которое необходимо пройти»; и позволяет оборудованным СВТС поездам работать с путевыми устройствами локомотивной сигнализации.
ЗАДАЧА ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к системам управления поездом и, в частности, к гибридной системе управления поездом, которая интегрирует стандартные путевые устройства локомотивной сигнализации с бортовыми СВТС-компьютерами. Соответственно, задачей настоящего изобретения является создание способа для перевода информации об ограничении скорости, генерируемой оборудованием локомотивной сигнализации, в границы разрешенного движения.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств сигнального управления и генерирует границу разрешенного движения, которая соответствует принятой информации о скорости, на основании текущего местоположения поезда.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной, сигнализации и вычисляет область местоположения для находящегося впереди поезда на основании информации об ограничении скорости, принимаемой от путевых устройств, текущего местоположения самого поезда и базы данных ответственного назначения, хранящейся на борту, которая включает топографию пути, гражданские ограничения скорости и местоположение путевого сигнального оборудования.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации и обеспечивает операцию абсолютной остановки в форме границы разрешенного движения.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной, сигнализации и обеспечивает операцию абсолютной остановки в форме границы разрешенного движения в местах, идентифицированных в бортовой базе данных.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации и вычисляет соответствующие границы разрешенного движения для поезда, так что достигается улучшение рабочего интервала, обеспечиваемого путевой системой локомотивной сигнализации.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации, и которое предоставляет человеко-машинный интерфейс, который совместим с СВТС человеко-машинным интерфейсом.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации и вычисляет соответствующие границы разрешенного движения, при этом допустимые безопасные пределы скорости основаны на временных ограничениях скорости, принимаемых от системы автоматического отслеживания поезда.
Еще одной задачей настоящего изобретения является создание путевого устройства управления поездом, которое управляет некоторой областью железной дороги, и которое имеет двусторонний обмен данными с поездами, работающими в этой области, и которое принимает информацию о местоположении от указанных поездов, и которое также принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации, и которое выдает границы разрешенного движения указанным поездам, причем информация об ограничении скорости представляет допустимые скорости в блок-участках локомотивной сигнализации, которые определяются устройствами локомотивной сигнализации на основании местоположения поездов в указанной области.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое работает как на территории локомотивной сигнализации, так и на СВТС-территории, и которое предоставляет единый человеко-машинный интерфейс в форме границы разрешенного движения.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации, и которое вычисляет соответствующие границы разрешенного движения и допустимые пределы скорости на основании конкретных тяговых и тормозных характеристик поезда и гражданских ограничений скорости, хранящихся в бортовой базе данных ответственного назначения.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации, а также границы разрешенного движения от путевых зональных регуляторов, и которое вычисляет соответствующие границы разрешенного движения для поезда на основании некоторого заранее определенного критерия.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации, и которое включает модули для взаимодействия этого устройства управления с системами локомотивной сигнализации.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации, и которое также принимает информацию, относящуюся к состояниям устройств, регулирующих соприкасающиеся маршруты в этой области, и вычисляет соответствующие границы разрешенного движения, которые отражают указанные состояния устройств, регулирующих соприкасающиеся маршруты.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации, принимает информацию о местоположении поезда от бортовой системы определения местоположения поезда, и которое вычисляет соответствующие границы разрешенного движения на основании по меньшей мере одной из справочных таблиц.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств локомотивной сигнализации, и которое переводит информацию об ограничении скорости в местоположение препятствия, которое определяет разрешенное движение для поезда.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает последовательность команд ограничения скорости от путевых устройств, когда поезд движется через путевые блок-участки локомотивной сигнализации, и генерирует безопасные границы разрешенного движения, которые основаны на критериях расчета для путевых блок-участков локомотивной сигнализации, конфигурации путевых блок-участков локомотивной сигнализации, местоположении путевых устройств, регулирующих соприкасающиеся маршруты, и видах неисправностей путевых устройств локомотивной сигнализации.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств и переводит эти ограничения скорости в границы разрешенного движения, с тем чтобы обеспечить систему управления поездом, которая независима от условий расчета для расчета путевого блок-участка локомотивной сигнализации.
Еще одной задачей изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств и переводит эти ограничения скорости в границы разрешенного движения, а затем генерирует бортовой график остановки, который отражает гражданские ограничения скорости, включенные в бортовую базу данных.
Еще одной задачей настоящего изобретения является создание бортового устройства управления поездом, которое принимает информацию об ограничении скорости от путевых устройств и переводит эти ограничения скорости в границы разрешенного движения на основании, отчасти, разности между конкретными ограничениями скорости в двух соседних блок-участках локомотивной сигнализации.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Названные выше и другие задачи изобретения решены согласно предпочтительному варианту реализации изобретения, который предоставляет гибридную систему управления поездом, которая интегрирует стандартные путевые устройства локомотивной сигнализации с бортовыми СВТС-компьютерами. Бортовые СВТС-компьютеры могут также обмениваться данными с системой автоматического отслеживания поезда (ATS), которая управляет путевым оборудованием, регулирующим соприкасающиеся маршруты, а также обеспечивает обслуживающие функции. Система ATS предоставляет информацию, относящуюся к временным ограничениям скорости, границам рабочей зоны и состоянию устройств, регулирующих соприкасающиеся маршруты.
Конфигурация бортового СВТС-устройства подобна стандартным бортовым СВТС-компьютерам ответственного назначения и включает независимую подсистему определения местоположения и скорости; интерфейс к тяговой, тормозной и другим вагонным подсистемам; базу данных ответственного назначения, которая включает данные, относящиеся к топографии путей, гражданским ограничениям скорости и местоположению путевых сигнальных устройств. Кроме того, бортовое СВТС-устройство включает интерфейс к приемной катушке локомотивной сигнализации, которая принимает путевую информацию об ограничении скорости, закодированную в электрические сигналы, которые подаются через путевые рельсы. В предпочтительном варианте реализации подсистема определения местоположения основана на передатчиках, расположенных на путях. Пассивные передатчики используются для предоставления отсчетного местоположения бортовой подсистеме определения местоположения и скорости. Между передатчиками одометрическое устройство непрерывно вычисляет местоположение и скорость поезда. Кроме того, динамические передатчики могут быть использованы в местоположениях сигнала входа в зону ожидания для предоставления маршрутной ответственного назначения информации бортовому оборудованию.
Необходимо отметить, что раскрытие основанной на передатчике системы для обеспечения независимого определения местоположения и скорости приведено для цели описания предпочтительного варианта реализации и не имеет целью ограничить изобретение. Как должно быть понятно специалисту в данной области, любая система определения местоположения и скорости, которая не зависит от путевых рельсовых цепей, может быть использована с настоящим изобретением. Примеры подобных подсистем определения местоположения и скорости включают показанные на фиг.8 индуктивные контуры, устройства радиогеодезической триангуляции, устройства глобального позиционирования (GPS) и т.п.
Способ, описанный в предпочтительном варианте реализации, основан на преобразовании принимаемых кодов скорости локомотивной сигнализации в границы разрешенного движения. Имеется два основных этапа в осуществлении такого преобразования. Во-первых, бортовое СВТС-оборудование определяет блок-участок локомотивной сигнализации, где в данный момент находится передний конец поезда. Это определение делается на основании текущего местоположения поезда (вычисляемого бортовой подсистемой определения местоположения) и информации базы данных ответственного назначения. Второй этап - это определение местоположения границы блок-участка для блок-участка локомотивной сигнализации, где имеется путевое препятствие. Путевое препятствие может представлять собой находящийся впереди поезд, сигнал остановки, вышедший из строя путевой регистрирующий блок-участок, конец путей, временная блокировка путей и т.п. Это определение местоположения границы блок-участка может осуществляться с использованием справочной таблицы/ которая отражает путевые коды скорости локомотивной сигнализации в зависимости от состояний различных путевых регистрирующих блок-участков. В другом варианте реализации указанное определение местонахождения границы блок-участка может осуществляться с помощью алгоритма, который использует принимаемый код скорости локомотивной сигнализации, текущий блок-участок локомотивной сигнализации и параметры расчета локомотивной сигнализации (т.е. характеристики поезда, данные о профиле путей, время реакции, используемые формулы сопротивления движению поезда и т.д.).
При обнаружении блок-участка локомотивной сигнализации, где имеется путевое препятствие, бортовой СВТС-компьютер будет генерировать границу разрешенного движения до местоположения входа в этот блок-участок локомотивной сигнализации. Буферная зона предусматривается перед указанным местоположением входа в блок-участок, с тем чтобы гарантировать минимальное безопасное расстояние до поезда, расположенного у начала блок-участка, где находится путевое препятствие. Эта граница разрешенного движения исполняется бортовым СВТС-оборудованием. Подобно работе СВТС, бортовой регулятор ответственного назначения будет генерировать график остановки (скорость/расстояние по кривой) для управления скоростью поезда и исполнять остановку поезда в конце границы разрешенного движения. Такой график остановки использует гражданские ограничения скорости, имеющиеся в конфигурации путевого сигнала. Бортовой регулятор ответственного назначения также обеспечивает защиту от превышения скорости путем обеспечения того, что действительная скорость поезда не превышает допустимый предел скорости.
Необходимо отметить, что генерация границы разрешенного движения является динамическим процессом, который непосредственно согласован с кодом скорости локомотивной сигнализации, принимаемым от путевых устройств. Внутри блок-участка бортовое СВТС-оборудование будет реагировать на любое изменение в принимаемом коде скорости локомотивной сигнализации. Более ограничительный код скорости повлечет за собой приближение границы разрешенного движения. В другом случае, более разрешительный код скорости повлечет за собой отдаление границы разрешенного движения.
Необходимо также отметить, что, когда поезд входит в новый блок-участок, как правило, граница разрешенного движения остается той же самой. Исключением является случай, когда путевое препятствие, ограничивающее разрешенное движение, движется к другому блок-участку локомотивной сигнализации одновременно с движением поезда к новому блок-участку. Это означает, что при нормальной работе динамические изменения в разрешенном движении будут наиболее вероятно происходить внутри границ различных блок-участков.
Эта гибридная архитектура обеспечивает ряд преимуществ по безопасности и рабочих преимуществ. Во-первых, разрешенное движение обычно проходит за входную границу блок-участка с кодом скорости «остановиться» или «остановиться и продолжить». В частности, граница разрешенного движения может проходить до выходной границы этого блок-участка, приближаясь к блок-участку, где имеется препятствие. Такое отдаление границы разрешенного движения обеспечивает повышение существующей пропускной способности. Во-вторых, эта гибридная архитектура может быть использована для преобразования существующей операции «остановиться и продолжить» в операцию «абсолютная остановка» благодаря сущности границы разрешенного движения. В таких областях применения гибридная архитектура может быть использована для повышения безопасности работы.
Эта концепция может также быть воплощена таким образом, что операции «абсолютная остановка» и «остановиться и продолжить» обеспечиваются в разных географических местоположениях на основании некоторого параметра базы данных. Например, операция «абсолютная остановка» может быть обеспечена в местоположениях сигнала входа в зону ожидания. В то же время, операция «остановиться и продолжить» может быть обеспечена на границе определенных блок-участков, где необходимо приблизиться к находящемуся впереди поезду под защитой рабочих правил. Это осуществляется с помощью некоторого параметра базы данных, который управляет выбором либо операции «абсолютная остановка», либо операции «остановиться и продолжить» в конце границы разрешенного движения. Далее, для систем, где используется подсистема ATS, этот параметр базы данных может вводиться в действие диспетчером ATS на центральном пункте управления. Далее, функция уведомления предусмотрена на борту поезда для обеспечения уведомления машиниста поезда об операции «остановиться и продолжить» в этом месте.
Другие преимущества этой архитектуры включают обеспечение более плавной работы за счет устранения точек смены кода на границах между различными блок-участками, что делает ходовые и тормозные характеристики поезда независимыми от расчета путевого блок-участка локомотивной сигнализации и способствует переходу с режима локомотивной сигнализации на режим СВТС путем задействования режима смешанного парка (т.е. поезда с локомотивной сигнализацией работают на одних путях с поездами СВТС). Еще один тип режима смешанного парка может быть обеспечен, когда, например, необходима работа грузовых поездов на одних путях с пригородными поездами. В таком случае каждый тип поезда будет работать на линии на основании его собственных ходовых и тормозных характеристик и независимо от условий расчета путевого блок-участка локомотивной сигнализации.
Необходимо отметить, что концепция гибридной архитектуры может быть воплощена на удлинении существующей линии локомотивной сигнализации. Удлинение линии будет оборудовано путевыми зональными регуляторами СВТС. Новые поезда, работающие на удлинении, оборудованы гибридным бортовым устройством и способны работать как на главной линии, так и на путях удлинения, используя режим разрешенного движения. Старые поезда, оборудованные бортовым оборудованием локомотивной сигнализации, будут продолжать работать на путях главной линии в режиме смешанного парка, но не смогут работать на новых путях удлинения. Очевидно, если необходима работа старых поездов на путях удлинения, то они должны быть модернизированы гибридным бортовым оборудованием.
Необходимо также отметить, что эта гибридная архитектура может быть использована с системами локомотивной сигнализации, которые используют путевые рельсы для передачи информации о скорости поездам, или с системами локомотивной сигнализации, которые используют индуктивные контуры. Эта архитектура может также быть использована с системами локомотивной сигнализации, которые используют режим расстояния, которое необходимо пройти, внутри блок-участка.
Еще одним преимуществом этой гибридной архитектуры является обеспечение возможности для поездов с разными тяговыми и тормозными характеристиками работать с существующими путевыми установками локомотивной сигнализации. По существу, эта архитектура сделает управление поездом независимым от условий, используемых для расчета путевого блок-участка локомотивной сигнализации.
Эта гибридная архитектура также обеспечивает стандартный СВТС-режим в областях, оборудованных путевыми зональными регуляторами. В таких областях поезд непрерывно передает его местоположение путевому зональному регулятору через подсистему обмена данными. В свою очередь, зональный регулятор отслеживает поезда в некоторой области и выдает разрешение движения поезду на основании местоположения находящегося впереди путевого препятствия. Эта граница разрешенного движения передается поезду через сеть обмена данными. Бортовой компьютер затем генерирует и исполняет график остановки, который соответствует принятой границе разрешенного движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие более подробные и конкретные задачи будут раскрыты в ходе нижеследующего описания, приведенного совместно с прилагаемыми чертежами, среди которых:
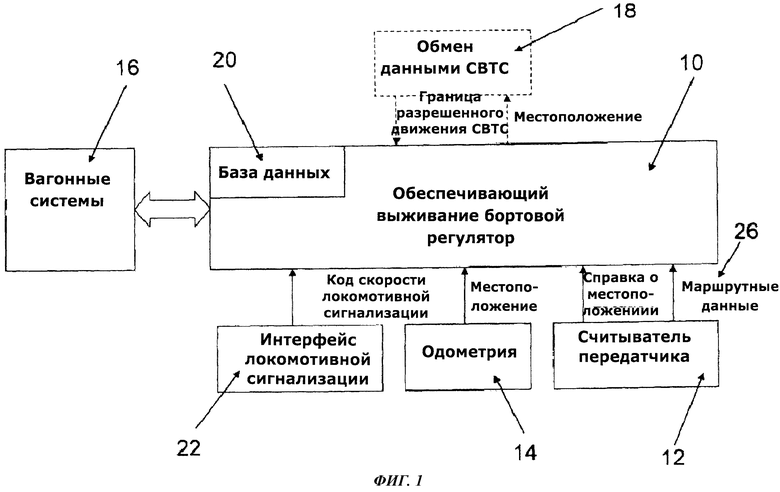
Фиг.1 - это блок-схема гибридного бортового узла «локомотивная сигнализация/СВТС», показывающая интерфейс локомотивного сигнала согласно изобретению.
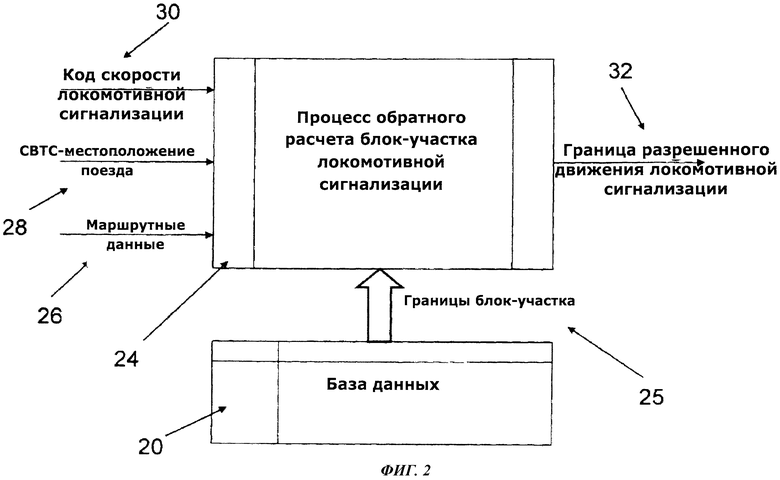
Фиг.2 показывает блок-схему процесса, используемого для преобразования ограничения скорости локомотивной сигнализации в границу разрешенного движения согласно изобретению.
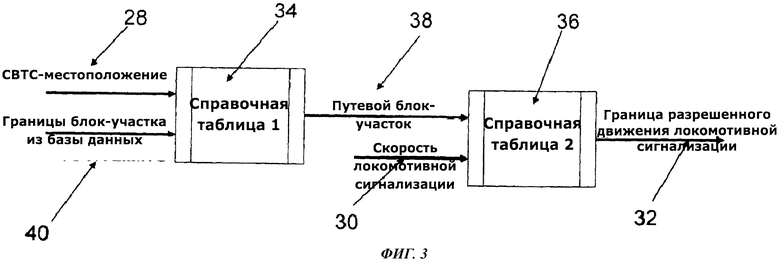
Фиг.3 показывает двухэтапный процесс для преобразования ограничения скорости локомотивной сигнализации в границу разрешенного движения с использованием справочных таблиц.
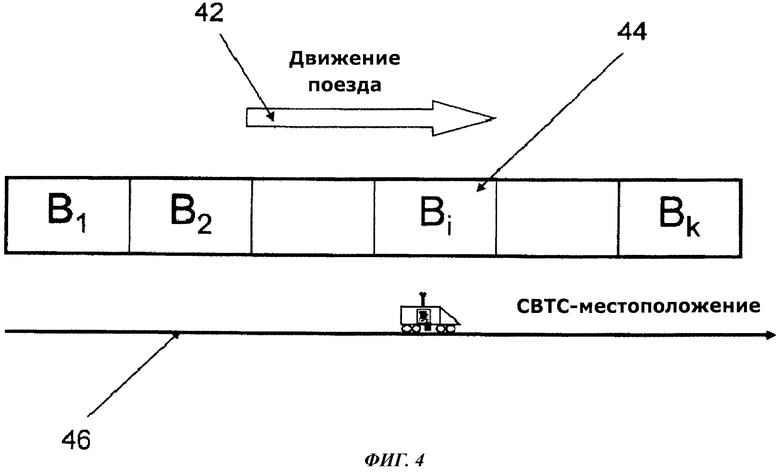
Фиг.4 показывает последовательность блок-участков локомотивной сигнализации и демонстрирует процесс, используемый для проецирования СВТС-местоположения поезда на указанные блок-участки с целью определения, какой блок-участок занят поездом.
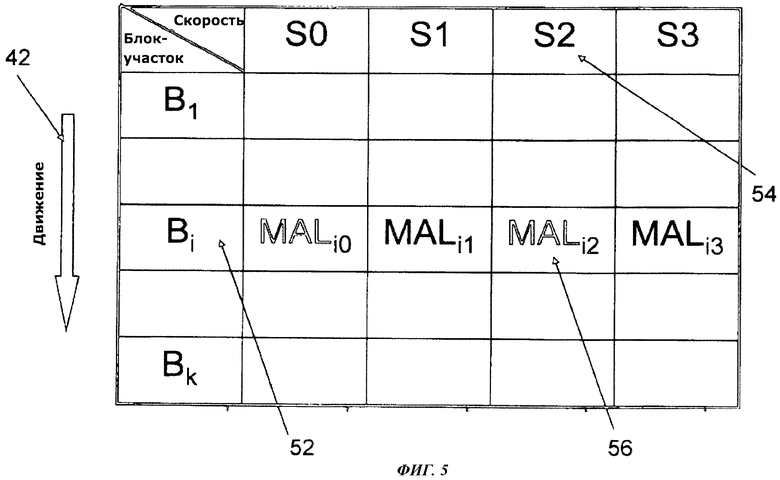
Фиг.5 показывает справочную таблицу для генерации границ разрешенного движения, которые соответствуют принимаемым кодам скорости локомотивной сигнализации, для различных путевых блок-участков.
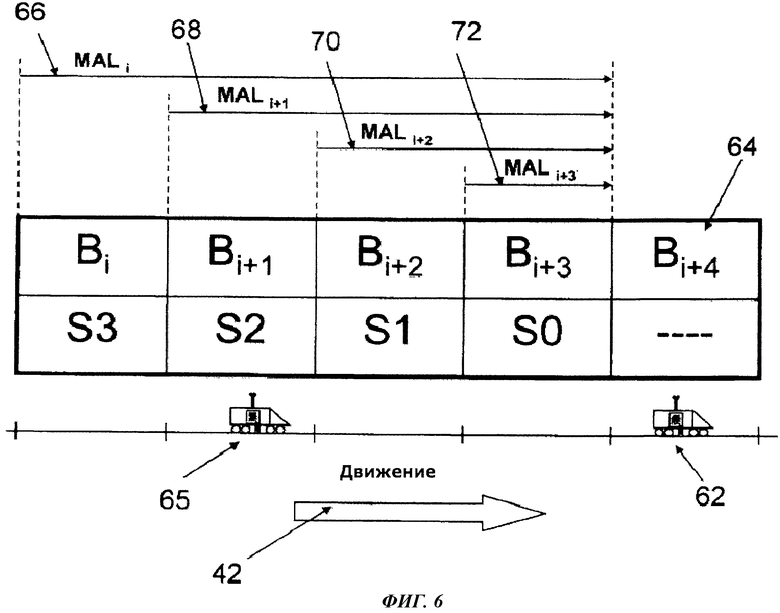
Фиг.6 показывает границы разрешенного движения локомотивной сигнализации для последовательных блок-участков относительно позиции находящегося впереди поезда.
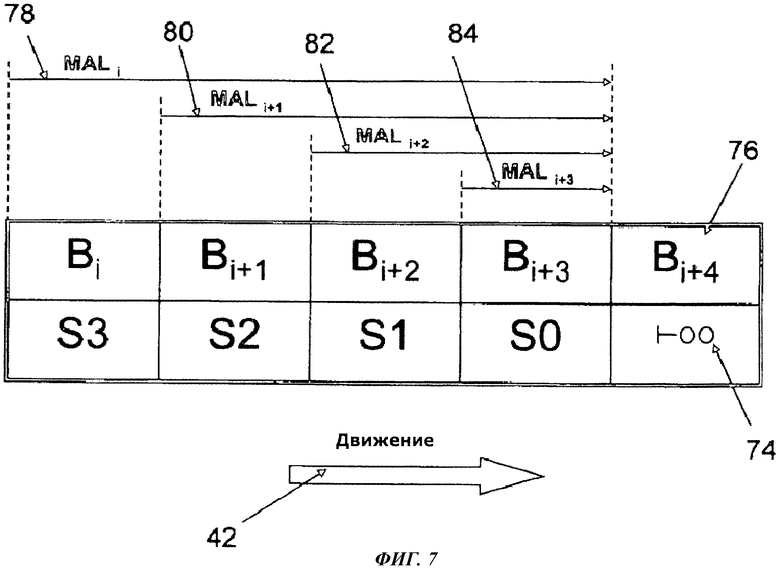
Фиг.7 показывает границы разрешенного движения локомотивной сигнализации для последовательных блок-участков относительно позиции путевого сигнала, который отображает аспект остановки.
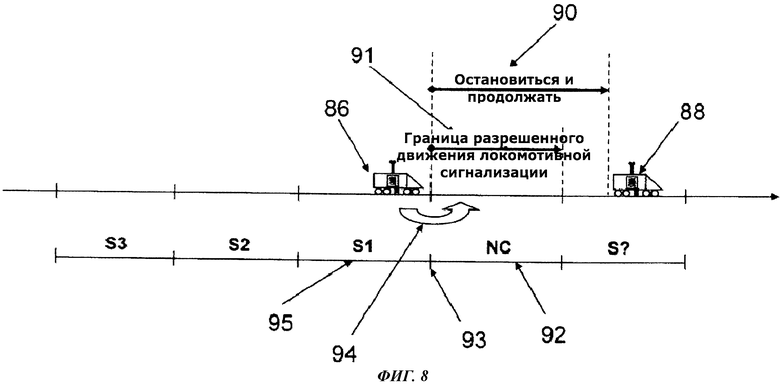
Фиг.8 показывает схему путевого блок-участка локомотивной сигнализации, который использует «отсутствие кода» для операции «остановиться и продолжить».
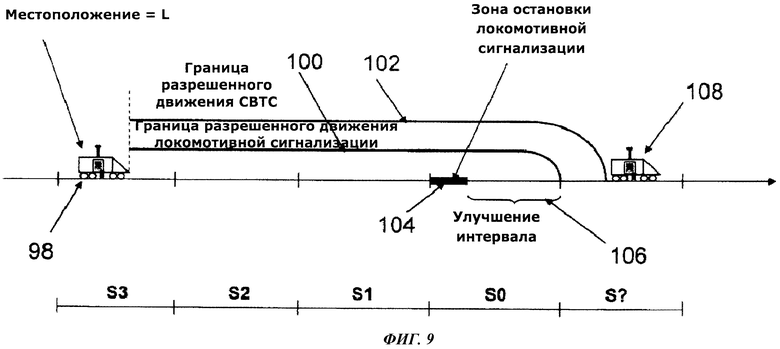
Фиг.9 показывает разрешенное движение локомотивной сигнализации относительно разрешенного движения СВТС для состояния, когда впереди поезд.
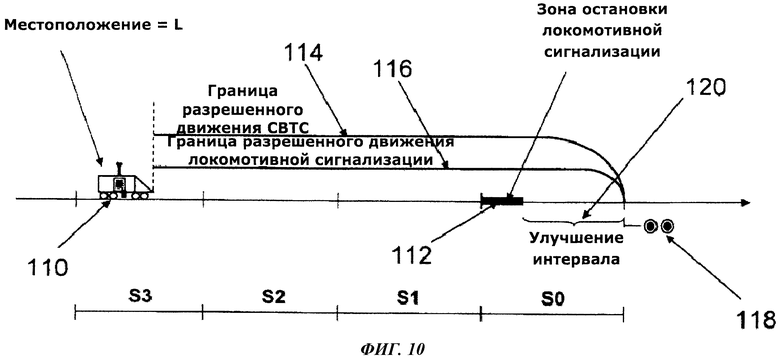
Фиг.10 показывает разрешенное движение локомотивной сигнализации относительно разрешенного движения СВТС для состояния, когда впереди сигнал, отображающий аспект остановки.
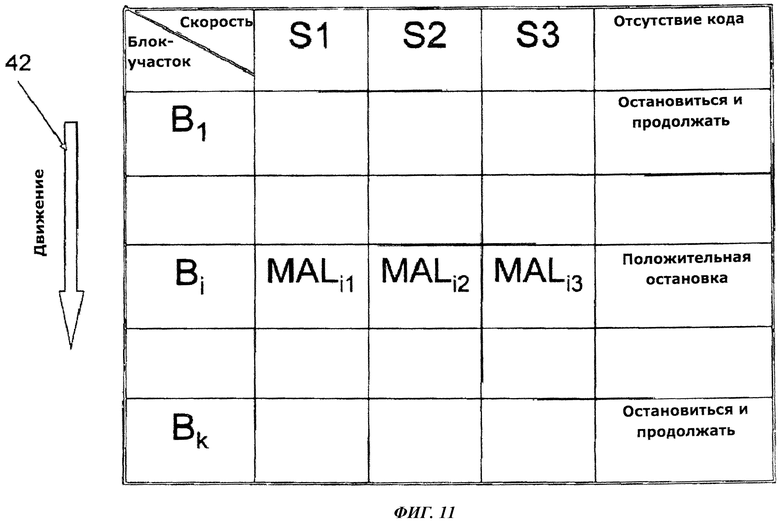
Фиг.11 показывает справочную таблицу для генерации границ разрешенного движения, которые соответствуют принимаемым кодам скорости локомотивной сигнализации, для различных путевых блок-участков, а также тип операции, необходимый на каждом блок-участке, когда имеет место состояние отсутствия кода.
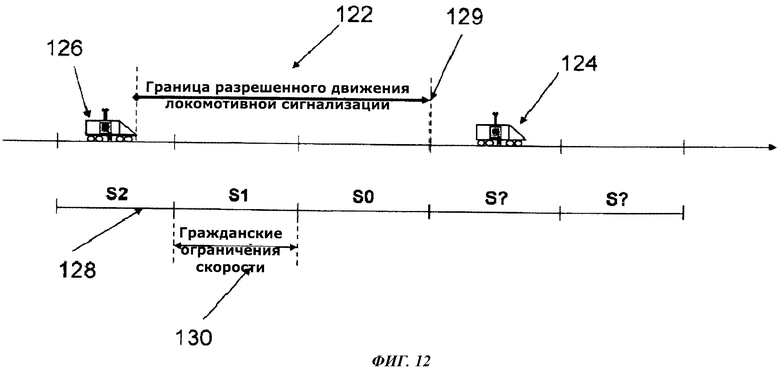
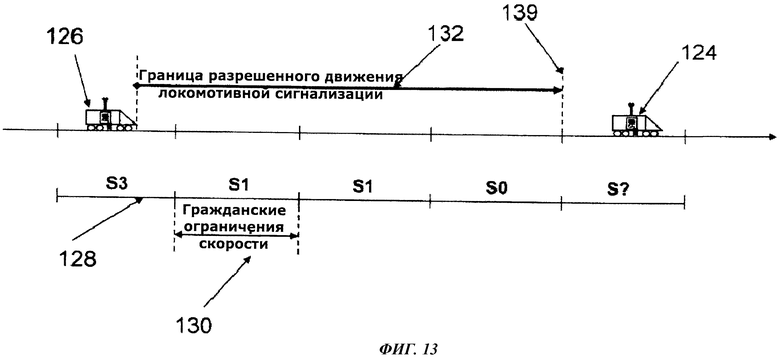
Фиг.12-14 показывают пример работы предпочтительного варианта реализации согласно настоящему изобретению на участке путей, где имеется гражданское ограничение скорости.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО ВАРИАНТА РЕАЛИЗАЦИИ
Предпочтительный вариант реализации настоящего изобретения описывает структуру и/или способ для обеспечения безопасной работы поездов на участках путей с локомотивной сигнализацией. Главная концепция настоящего изобретения - это использование на борту поездов кодов скорости локомотивной сигнализации, принимаемых от путевых устройств локомотивной сигнализации, для генерации соответствующих границ разрешенного движения. По существу, структура, используемая настоящим изобретением, представляет собой гибридную архитектуру, которая сочетает путевые устройства локомотивной сигнализации и бортовой СВТС-регулятор.
Настоящее изобретение сохраняет путевые рельсы в качестве составной части системы управления поездом, в то же время обеспечивая многие из преимуществ работы СВТС. Предпочтительный вариант реализации также использует бортовую базу данных ответственного назначения, которая включает информацию о топографии пути, конфигурацию блок-участка локомотивной сигнализации, местоположение путевых сигнальных устройств, границы станционных платформ и гражданские ограничения скорости. Приемная катушка локомотивной сигнализации вместе с дешифратором локомотивной сигнализации используется для обнаружения и дешифрования кодовой посылки локомотивной сигнализации, присутствующей в путевых рельсах. Помимо этого, используется так называемый процесс обратного расчета локомотивной сигнализации для определения местоположения препятствия, соответствующего принятой посылке локомотивной сигнализации.
Теперь обратимся к чертежам, где иллюстрации представлены в целях описания предпочтительного варианта реализации изобретения и не предназначены для ограничения ими изобретения. Фиг.1 - это блок-схема бортового устройства управления поездом согласно предпочтительному варианту реализации изобретения. Оно включает бортовой регулятор (VOBC) 10 ответственного назначения, который включает базу 20 данных ответственного назначения. Регулятор 10 взаимодействует со считывателем 12 передатчика, одометрическим устройством 14, узлом 18 обмена данными, системами 16 приведения в движение и торможения вагона* и интерфейсным узлом 22 локомотивной сигнализации. Считыватель 12 принимает информацию о местоположении от пассивных передатчиков, установленных на путях, и предоставляет справочную информацию об отсчетном местоположении бортовой подсистеме определения местоположения. Считыватель 12 может также предоставлять маршрутные данные на основании информации, предоставляемой путевыми устройствами, регулирующими соприкасающиеся маршруты/ динамическим передатчиком, расположенным возле указанных устройств, регулирующих соприкасающиеся маршруты. Устройство 14 выполняет функции расчета местоположения и скорости для регулятора 10, так что регулятор 10 может непрерывно определять местоположение и скорость поезда, когда поезд движется по путям. Как и в традиционных системах СВТС, отсчетное местоположение, принимаемое от считывателя 12, используется для устранения любой неточности в вычисляемом местоположении поезда.
Узел 18 является необязательным устройством и используется в вариантах реализации, которые используют путевые зональные регуляторы, В таком случае регулятор 10 принимает СВТС-границы разрешенного движения от путевых зональных регуляторов и передает местоположение поезда указанным зональным регуляторам через узел 18. Узел 22 предоставляет сигнал с кодом скорости локомотивной сигнализации, обнаруживаемый в рельсах, регулятору 10. Этот сигнал находится обычно в форме модуляции несущей частоты. Кодовые посылки обычно соответствуют ограничениям скорости локомотивной сигнализации в путевых блок-участках локомотивной сигнализации. Дешифрование или демодуляция принимаемого сигнала скорости может быть частью функции узла 22 либо может входить в функции обеспечивающего выживание бортового регулятора.
Фиг.2 описывает общий процесс перевода дешифрованной скорости 30 локомотивной сигнализации в границу 32 разрешенного движения локомотивной сигнализации. В сущности, регулировочная логика ответственного назначения, заключенная в регулятор 10, генерирует границу 32, которая соответствует принимаемому ограничению 30 скорости, используя процесс 24 обратного расчета блок-участка локомотивной сигнализации. Данные, необходимые для такого процесса включают СВТС-местоположение 28 поезда, границы 25 блок-участка локомотивной сигнализации, скорость 30 и маршрутные данные 26, если необходимо. Местоположение 28 генерируется бортовой подсистемой определения местоположения на основании информации, принимаемой от считывателя 12 и одометрического узла 14.
Необходимо отметить, что название данных 28 о местоположении поезда как СВТС-местоположение поезда раскрывается для целей описания предпочтительного варианта реализации, который имеет гибридную архитектуру, так что регулятор 10 может работать как на территории локомотивной сигнализации, так и на СВТС-территории. Как должно быть понятно специалисту в данной области, эта концепция может быть использована и для работы исключительно на территории с локомотивной сигнализацией, и в таком случае данные 28 могут быть просто названы бортовым местоположением поезда.
Данные о границе блок-участка локомотивной сигнализации хранятся в бортовой базе данных ответственного назначения как часть набора данных, который включает топографию путей (т.е. информацию о размещении путей, информацию об уклоне, информацию о поворотах, данные о возвышенностях и т.д.), гражданские ограничения скорости, местоположение путевого сигнального оборудования, местоположение станционных платформ и т.д.
Данные 26 включают позицию путевых стрелочных переводов и состояние путевых сигналов. Эти данные 26 обычно не требуются для определения границы разрешенного движения локомотивной сигнализации, а только в путевых установках локомотивной сигнализации, где код скорости локомотивной сигнализации основан частично на гражданском ограничении скорости, присутствующем на маршруте, который соприкасается с другим маршрутом (например, когда поезд проходит по ответвлению некоторого маршрута). Данные 26 могут также быть необходимы для предоставления информации экипажу на дисплее машиниста поезда (TOD).
В зависимости от потребностей применения, данные 26 могут предоставляться путевыми передатчиками, от путевого зонального регулятора или от подсистемы ATS с использованием узла 18. Данные 26 могут также быть извлечены косвенным образом из принимаемого кода 30 скорости локомотивной сигнализации с использованием информации, хранящейся в базе 20.
Процесс 24 может осуществляться одной из структур. Может быть предусмотрен программный алгоритм для идентификации местоположения блок-участка, где имеется препятствие (находящийся впереди поезд, сигнал остановки, конец путей и т.д.). Такой программный алгоритм будет основан на данных о топографии путей и условиях расчета, используемых для расчета путевого блок-участка локомотивной сигнализации, например, на тяговых или ходовых характеристиках поезда, модели аварийного тормоза, времени реакции и т.д. Вторая структура показана на фиг.3 и основана на двухэтапном процессе, который использует справочные таблицы.
На первом этапе 34 справочная таблица 1 используется для идентификации блок-участка 38, где находится передний конец поезда. Для идентификации указанного блок-участка 38 эта справочная таблица использует СВТС-местоположение 28 поезда, которое определено бортовой подсистемой определения местоположения поезда, и информацию о местоположении границы для путевых блок-участков 40, которая предоставляется бортовой базой данных ответственного назначения. Графическое представление этапа 34 показано на фиг.4. Путевой блок-участок Bi 44, где расположен поезд, определяется путем сравнения бортового местоположения 46 поезда с границами различных путевых блок-участков. Этот процесс продолжается, когда поезд движется в назначенном направлении 42 движения.
На втором этапе 36, показанном на фиг.3, справочная таблица 2 используется для определения границы 32. Эта справочная таблица использует информацию о блок-участке 38, определенную на первом этапе, и принимаемый код 30 скорости локомотивной сигнализации для генерации границы (MAL) 32. Фиг.5 показывает пример справочной таблицы, где MALi2 56 представляет границу разрешенного движения локомотивной сигнализации, которая соответствует коду S2 54 скорости локомотивной сигнализации, когда поезд находится в блок-участке Bi 52. По мере того как поезд продолжает движение в направлении 42, новое разрешенное движение будет генерироваться на основании идентификации блок-участка и принимаемого кода скорости.
Необходимо отметить, что, как показано на фиг.6, при наличии поезда 62 в блок-участке Bi+4 64, следующего в направлении 42, границы Bi 66, Bi+1 68, Bi+2 70 и Bi+3 72 разрешенного движения прерываются в одной и той же точке, а именно в начале буферной зоны на границе между блок-участками Bi+3 и Bi+4. Это означает, что, когда следующий поезд 65 переходит в новый блок-участок, граница разрешенного движения для этого поезда наиболее вероятно останется такой же. Исключение имеет место, когда одновременно с поездом 65, переходящим в новый блок-участок, идущий впереди поезд 62 тоже переходит в новый блок-участок. Это также означает, что изменение в границе разрешенного движения для поезда будет наиболее вероятно происходить внутри блок-участка, а не на границе блок-участка. Фиг.7 показывает, что такая же операция, что показана на фиг.6, происходит, когда разрешенное движение 78, 80, 82 и 84 ограничено сигналом 74, отображающим аспект остановки.
Необходимо также отметить, что разрешенное движение укорачивается только в случае неисправности, либо если возникают нештатные условия работы. Например, выход из строя рельсовой цепи или исчезновение кода скорости повлекут за собой укорачивание разрешенного движения. Кроме того, исчезновение или снижение качества некоторого аспекта в путевом сигнале вызовет укорачивание разрешенного движения.
Граница разрешенного движения, генерируемая регулятором 10 или принимаемая от путевого зонального регулятора через подсистему 18 обмена СВТС-данными, исполняется регулятором 10. Подобно работе СВТС, регулятор 10 будет генерировать график остановки (скорость/расстояние по кривой) для управления скоростью поезда и исполнять остановку поезда в конце границы разрешенного движения. Такой график остановки включает гражданские ограничения скорости, присутствующие в конфигурации путевого сигнала и хранящиеся в бортовой базе 20. Регулятор 10 также обеспечивает защиту от превышения скорости путем обеспечения того, что действительная скорость поезда, измеряемая модулем 14, не превышает допустимый предел скорости, определяемый сгенерированным графиком остановки. В случае превышения скорости обеспечивающий выживание бортовой регулятор активирует тормозную подсистему поезда.
В областях перекрытия между территорией локомотивной сигнализации и территорией СВТС возможен прием как разрешенного движения от путевого зонального регулятора, так и кода скорости локомотивной сигнализации от путевых устройств локомотивной сигнализации. В таком случае, и поскольку как генерируемые, так и принимаемые границы разрешенного движения являются ответственного назначения, используется более разрешительная граница разрешенного движения. Как должно быть понятно специалисту в данной области, бортовая логика может быть добавлена для точного определения демаркационной точки между основанной на локомотивной сигнализации работой и основанной на СВТС работой. Такая логика будет зависеть от информации, хранящейся в базе данных ответственного назначения.
Гибридная архитектура, показанная на фиг.1, для предпочтительного варианта реализации может быть воплощена как с системой локомотивной сигнализации, которая использует специальный код «SO» для операции «абсолютная остановка», так и с системой локомотивной сигнализации, которая использует отсутствие «NC» кода для обеспечения операции «остановиться и продолжить». Фиг.8 демонстрирует, как концепция, представленная в настоящем описании, воплощена, когда отсутствие «NC» 92 кода используется как часть штатной работы. В частности, система должна различать NC 92, соответствующее операции «остановиться и продолжить», и отсутствие кода, являющееся результатом исчезновения кода локомотивной сигнализации в блок-участке, т.е. неисправности путевого оборудования либо узла 22.
Как показано на фиг.8, когда поезд 86 пересекает граничную точку 93 между блок-участком, который имеет некоторый действующий код 95 локомотивной сигнализации, и блок-участком с отсутствием 92 кода, необходимо сохранить действующее разрешенное движение до конца блок-участка, который имеет отсутствие 92 кода. Это возможно ввиду того факта, что перед моментом во времени, когда поезд совершает пересечение 94 точки 93, он принимает некоторый действующий код S1 скорости локомотивной сигнализации, который показывает, что блок-участок 92 с отсутствием кода является свободным. Это отличается от состояния, когда действующий код S3, S2 или S1 скорости локомотивной сигнализации исчез внутри границ блок-участка, что повлекло за собой состояние отсутствия кода. В таком случае состояние отсутствия кода повлечет за собой укорачивание разрешенного движения. Поэтому для воплощения этой архитектуры для системы локомотивной сигнализации, которая использует отсутствие кода для операции «остановиться и продолжить», используется бортовая база данных для различения состояния отсутствия кода внутри границ блок-участка и состояния 92 отсутствия кода на границе 93 блок-участка, где состояние отсутствия кода является ожидаемым. В этом случае переход от первого кода скорости к отсутствию кода на границе блок-участка используется в качестве предпосылки для сохранения разрешенного движения до его текущей границы.
Как показано на фиг.9, архитектура, раскрытая в предпочтительном варианте реализации, даст в результате улучшение 106 интервала в системах локомотивной сигнализации, которые обеспечивают операцию абсолютной остановки. Поезд 98, следующий за идущим впереди поездом 108, обычно останавливается в начале блок-участка 104 с кодом SO. Разрешенное движение 100 локомотивной сигнализации позволяет поезду пройти до конца этого блок-участка. Величина этого улучшения 106 зависит от расчета путевого блок-участка локомотивной сигнализации. Необходимо отметить, что улучшение 106 в случае, когда разрешенное движение ограничено поездом 108, меньше, чем улучшение интервала, обеспечиваемое СВТС-разрешенным движением 102. Однако в случае, когда разрешенное движение ограничено путевым сигналом, отображающим аспект 118 остановки, как показано на фиг.10, улучшение 120 интервала является одинаковым для основанной на локомотивной сигнализации работы с ее разрешенным движением 116 и для основанной на СВТС работы с ее разрешенным движением 114.
Необходимо также отметить, что архитектура, показанная на фиг.1, обеспечивает простой и эффективный способ преобразования операции «остановиться и продолжить» в операцию «абсолютная остановка». Как показано на фиг.8, граница 91 разрешенного движения локомотивной сигнализации обеспечит, что поезд 86 останавливается в конце блок-участка с состоянием 92 отсутствия кода, в отличие от операции 90 «остановиться и продолжить», которая позволяет этому поезду приблизиться к идущему впереди поезду 88 под защитой рабочих правил. Эта гибридная архитектура, следовательно, повысит безопасность работы за счет уменьшения опоры на рабочие правила, используемые в операции «остановиться и продолжить», и за счет сведения к минимуму возможности человеческой ошибки.
Кроме того, как показано на фиг.11, справочная таблица, которая предоставляет различные разрешенные движения, соответствующие принимаемым ограничениям скорости локомотивной сигнализации, может быть расширена для включения типа операции, необходимого в каждом блок-участке, когда обнаруживается состояние отсутствия кода. Например, операция абсолютной остановки может быть предусмотрена в конце блок-участка при приближении к сигналу входа в зону ожидания или при приближении к концу путей. Операция остановки и продолжения может сохраняться в других блок-участках, где во время работы необходимо позволить поезду приблизиться к находящемуся впереди поезду. Кроме того, когда подсистема автоматического отслеживания поезда используется и обменивается данными с бортовым компьютером 10 ответственного назначения, операция «остановиться и продолжить» может быть разрешена в базе данных ответственного назначения, но динамически активироваться центральным диспетчером ATS. Далее, функция уведомления может быть воплощена в программном обеспечении ответственного назначения для регулятора 10 для обеспечения того, что машинист поезда уведомляется об операции «остановиться и продолжить» в этом месте.
В некоторых установках локомотивной сигнализации вычисление путевого кода скорости локомотивной сигнализации основано на занятости путей, состоянии аспектов путевого сигнала, а также дополнительных факторах. Эти факторы могут включать гражданские ограничения скорости и динамическую маршрутную информацию, например, о том, что поезд работает на ответвлении маршрута. В таких установках предусмотрены дополнительные бортовые справочные таблицы и/или дополнительная бортовая логика для различия между кодом скорости локомотивной сигнализации, который отражает гражданское ограничение скорости, и кодом скорости локомотивной сигнализации, который отражает позицию находящегося впереди поезда либо наличие путевого сигнала, отображающего аспект остановки.
Фиг.12 и 13 демонстрируют пример гражданского ограничения 130 скорости, которое ограничивает код скорости в соответствующем блок-участке 130 значением S1 независимо от местоположения находящегося впереди поезда 124. Что отличается между этими двумя фигурами - это скорость в блок-участке 128, предшествующем блок-участку 130^ связанному с ограничением 130. На фиг.12 ограничение скорости в блок-участке 128 составляет S3, в то время как на фиг.13 скорость в указанном блок-участке составляет S2. Бортовая логика определяет, что переход от S2 к S1 на границе между этими двумя блок-участками является предпосылкой для сохранения MAL 122 локомотивной сигнализации до конца 129 блок-участка SO, как показано на фиг.12. В другом случае переход от S3 к S1 будет сохранять MAL132 локомотивной сигнализации до конца блок-участка SO, как показано на фиг.13.
Необходимо отметить, что, если поезд 124 движется к новому блок-участку, в то время как следующий поезд 126 по-прежнему находится в блок-участке, связанном с гражданским ограничением скорости, то MAL 122 не будет продвигаться вперед и останется до конца 129 блок-участка S1, как показано на фиг.14. Это условие, однако, не будет отрицательно влиять на работу, поскольку поезд 126 должен соблюдать ограничение 130 независимо от границы разрешенного движения. Как должно быть понятно специалисту в данной области, конфигурация, описанная на фиг.12-14, является лишь одним примером различных конфигураций локомотивной сигнализации с различными гражданскими ограничениями скорости, которые могут присутствовать на некоторой конкретной линии. Соответственно, в случаях применения стандартного расчета сигнала, конкретный расчет бортовой логики будет подгоняться под конкретную конфигурацию путевого блок-участка локомотивной сигнализации.
Схожим образом, дополнительные справочные таблицы и/или дополнительная логика предусмотрены в областях применения, где поезд работает на подходе к ответвлению маршрута и на ответвлении маршрута. В таком случае переход между различными сочетаниями кодов скорости локомотивной сигнализации может показывать позицию путевого стрелочного перевода. В другом варианте реализации позиция этого стрелочного перевода может сообщаться посредством динамического путевого передатчика, который считывается бортовой подсистемой определения местоположения. Кроме того, в вариантах реализации, где используется подсистема ATS, информация, относящаяся к позиции путевых стрелочных переводов, может передаваться поезду для применения в целях, отличных от ответственного назначения, таких как предоставление маршрутной информации на дисплее машиниста поезда.
Как должно быть понятно специалистам в данной области, другие варианты реализации могут быть созданы для воплощения новой концепции, описанной в настоящей заявке. Например, другие подсистемы определения местоположения могут быть использованы для определения местоположения поезда независимо от основной системы распознавания фиксированного блок-участка. Помимо этого, другие алгоритмы могут быть использованы для обеспечения обратного расчета блок-участка локомотивной сигнализации на борту. Кроме того, эта гибридная архитектура может быть интегрирована в путевой зональный регулятор. В таком случае поезда будут передавать их бортовые местоположения этому путевому зональному регулятору. Схожим образом, коды скорости от различных путевых блок-участков тоже передаются этому зональному регулятору. В свою очередь, зональный регулятор определит границу разрешенного движения на основании кода скорости в определенном блок-участке и передаст указанную границу разрешенного движения поезду, находящемуся в этом блок-участке, через СВТС-подсистему обмена данными.
Кроме того, бортовой регулятор 10 может быть воплощен с использованием нескольких модулей ответственного назначения. Эти модули могут представлять собой независимые программные модули, работающие на общей аппаратной платформе, либо каждый из модулей может работать на отдельной аппаратной платформе. В этом еще одном варианте реализации первый модуль ответственного назначения выполняет функцию определения местоположения; второй модуль ответственного назначения выполняет функцию дешифровки кода скорости и преобразования его в границу разрешенного движения; а третий модуль ответственного назначения генерирует и исполняет график остановки на основании генерируемой границы разрешенного движения. Второй модуль может включать алгоритм, который исполняет процесс обратного расчета блок-участка, либо, в еще одном варианте реализации, может использовать справочные таблицы.
Кроме того, другие программы ответственного назначения могут быть использованы для осуществления преобразования принимаемых кодов скорости локомотивной сигнализации в границы разрешенного движения. Очевидно, что эти программы будут отличаться друг от друга в той или иной степени. Однако в область компетенции инженера по СЦБ (устройствам сигнализации, централизации и блокировки) входит предоставление конкретных программ для воплощения алгоритмов ответственного назначения с целью обеспечения функций, описанных в настоящей заявке. Также необходимо понимать, что изложенное выше подробное описание приведено лишь для простоты уяснения и является примером воплощения изобретения, а не ограничивает изобретение конкретными показанными вариантами реализации. Очевидно, что при чтении изложенного выше специалист в данной области представляет те или иные подсистемы, модификации, упрощения, изменения и усовершенствования. Необходимо, следовательно, понимать, что все эти модификации, упрощения, изменения и усовершенствования были опущены ради краткости и читаемости, но входят в объем и сущность приведенной ниже формулы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система передачи ответственной информации о маршрутах приема/отправления и кодах АЛС | 2018 |
|
RU2701274C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2012 |
|
RU2519323C1 |
| Устройство для регулирования движения поездов | 2018 |
|
RU2679795C1 |
| Система для регулирования движения поездов | 2022 |
|
RU2791774C1 |
| Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров | 2024 |
|
RU2828493C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ, ДОПУСКАЮЩИЙ НАХОЖДЕНИЕ ДВУХ ПОЕЗДОВ НА ОДНОМ БЛОК-УЧАСТКЕ, СОСТОЯЩЕМ ИЗ НЕСКОЛЬКИХ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2768305C1 |
| УНИФИЦИРОВАННЫЙ ВЫЧИСЛИТЕЛЬНЫЙ КОМПЛЕКС СИСТЕМЫ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ | 2009 |
|
RU2405702C1 |
| Система интервального регулирования движения поездов | 2017 |
|
RU2653672C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
| Система для интервального регулирования движения поездов на перегоне большой длины | 2017 |
|
RU2645495C1 |
Изобретение относится к системам управления поездом. Бортовая система управления поездом, которая взаимодействует с путевой установкой локомотивной сигнализации, содержит подсистему определения местоположения, средство для приема и декодирования кодов скорости локомотивной сигнализации, средство для преобразования упомянутых кодов скорости локомотивной сигнализации и средство для генерации графика остановки. Система управления поездом, в которой генерирование пределов разрешенного движения является динамическим процессом, при котором более ограничительный код скорости приводит в результате к усечению предела разрешенного движения, а более разрешительный код скорости приводит в результате к расширению предела разрешенного движения. Бортовой контроллер поезда содержит бортовую подсистему определения местоположения, бортовое устройство интерфейса, бортовой процессор со считываемым компьютером носителем информации и сегмент управляющей логики. Достигается отображение границ разрешенного движения. 7 н. и 24 з.п. ф-лы, 14 ил.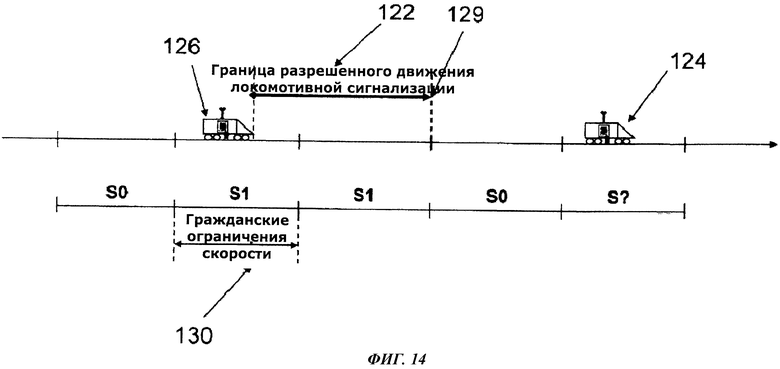
1. Бортовая система управления поездом, которая взаимодействует с путевой установкой локомотивной сигнализации, содержащая:
бортовую подсистему определения местоположения,
бортовое средство для приема и декодирования кодов скорости локомотивной сигнализации,
бортовое средство для преобразования упомянутых кодов скорости локомотивной сигнализации, принятых от установки локомотивной сигнализации, в пределы разрешенного движения и
бортовое средство для генерации графика остановки для обеспечения соблюдения предела разрешенного движения,
при этом преобразование является динамическим процессом, при котором предел разрешенного движения усекается в случае, если принятый код скорости локомотивной сигнализации является более ограничительным, и предел разрешенного движения расширяется в случае, если принятый код скорости локомотивной сигнализации является более разрешительным.
2. Бортовая система управления поездом по п.1, в которой упомянутое средство для преобразования кодов скорости локомотивной сигнализации в пределы разрешенного движения включает в себя справочные таблицы.
3. Бортовая система управления поездом по п.2, в которой упомянутые справочные таблицы определяют идентификационную информацию путевого блок-участка локомотивной сигнализации в пределах упомянутой установки локомотивной сигнализации, где расположен поезд.
4. Бортовая система управления поездом по п.2, в которой упомянутые справочные таблицы определяют предел разрешенного движения, который соответствует идентификационной информации путевого блок-участка локомотивной сигнализации и коду скорости локомотивной сигнализации.
5. Бортовая система управления поездом по п.1, в которой упомянутое средство для преобразования кодов скорости локомотивной сигнализации в пределы разрешенного движения включает в себя алгоритм, который определяет местоположение путевого препятствия, которое соответствует принимаемому коду скорости локомотивной сигнализации.
6. Бортовая система управления поездом по п.1, в которой упомянутая подсистема определения местоположения основана на приемопередатчике.
7. Бортовая система управления поездом, которая взаимодействует с путевой установкой локомотивной сигнализации, содержащая:
бортовой модуль ответственного назначения для определения местоположения поезда,
бортовой модуль ответственного назначения, который декодирует код скорости, принимаемый от путевого устройства, и преобразует его в соответствующий предел разрешенного движения, и
бортовой модуль ответственного назначения, который генерирует и обеспечивает соблюдение графика остановки, основанного на упомянутом пределе разрешенного движения,
при этом преобразование является динамическим процессом, при котором предел разрешенного движения усекается в случае, если принятый код скорости локомотивной сигнализации является более ограничительным, и предел разрешенного движения расширяется в случае, если принятый код скорости локомотивной сигнализации является более разрешительным.
8. Бортовая система управления поездом по п.7, в которой упомянутый модуль ответственного назначения, который преобразует код скорости в соответствующий предел разрешенного движения, использует справочные таблицы.
9. Бортовая система управления поездом по п.7, в которой упомянутый модуль ответственного назначения, который преобразует код скорости в соответствующий предел разрешенного движения, использует алгоритм ответственного назначения, который определяет местоположение путевого препятствия, связанного с упомянутым кодом скорости.
10. Бортовая система управления поездом по п.7, в которой модуль ответственного назначения, который генерирует и обеспечивает соблюдение графика остановки, включает в себя базу данных ответственного назначения.
11. Бортовая система управления поездом по п.10, в которой упомянутая база данных ответственного назначения включает информацию, относящуюся к топографии путей.
12. Бортовая система управления поездом по п.10, в которой упомянутая база данных ответственного назначения включает в себя информацию, относящуюся к гражданским пределам скорости.
13. Система управления поездом, в которой бортовой контроллер ответственного назначения взаимодействует с путевой установкой локомотивной сигнализации, и в которой упомянутый бортовой контроллер определяет местоположение поезда, принимает дискретные коды скорости от путевых устройств локомотивной сигнализации, генерирует пределы разрешенного движения, которые соответствуют кодам скорости, принимаемым от устройств локомотивной сигнализации, и генерирует и обеспечивает соблюдение графиков остановки, основанных на упомянутых пределах разрешенного движения,
при этом генерирование пределов разрешенного движения является динамическим процессом, при котором более ограничительный код скорости приводит в результате к усечению предела разрешенного движения, а более разрешительный код скорости приводит в результате к расширению предела разрешенного движения.
14. Система управления поездом, в которой бортовой контроллер ответственного назначения взаимодействует с путевой установкой локомотивной сигнализации, и в которой упомянутый бортовой контроллер ответственного назначения содержит:
бортовую подсистему определения местоположения,
бортовое устройство интерфейса для приема кодов скорости от установки локомотивной сигнализации,
бортовой процессор ответственного назначения со считываемым компьютером носителем информации, закодированным управляющей логикой, и базой данных ответственного назначения для управления движением поезда,
сегмент управляющей логики, который преобразует принимаемый код скорости локомотивной сигнализации в предел разрешенного движения, и
сегмент управляющей логики, который генерирует и обеспечивает соблюдение графиков остановки, которые основаны на пределах разрешенного движения,
при этом преобразование является динамическим процессом, при котором предел разрешенного движения усекается в случае, если принятый код скорости локомотивной сигнализации является более ограничительным, и предел разрешенного движения расширяется в случае, если принятый код скорости локомотивной сигнализации является более разрешительным.
15. Система управления поездом по п.14, в которой упомянутый сегмент управляющей логики, который преобразует код скорости локомотивной сигнализации в предел разрешенного движения, основан на алгоритме, который определяет местоположение путевого препятствия, связанного с упомянутым кодом скорости локомотивной сигнализации.
16. Система управления поездом по п.15, в которой упомянутый алгоритм основан на логике обратного расчета для путевого блок-участка локомотивной сигнализации, который генерирует коды скорости.
17. Система управления поездом по п.14, в которой упомянутый сегмент управляющей логики, который преобразует код скорости в предел разрешенного движения, использует справочные таблицы.
18. Система управления поездом по п.14, в которой бортовой контроллер ответственного назначения дополнительно содержит модуль обмена данными для обмена данными с путевым зональным контроллером.
19. Система управления поездом по п.18, в которой упомянутый модуль обмена данными передает информацию о местоположении поезда путевому зональному контроллеру.
20. Система управления поездом по п.18, в которой упомянутый модуль обмена данными принимает пределы разрешенного движения от путевого зонального контроллера.
21. Система управления поездом по п.14, в которой бортовой контроллер ответственного назначения дополнительно содержит модуль обмена данными для обмена данными с подсистемой автоматического отслеживания поезда.
22. Система управления поездом по п.14, в которой упомянутый сегмент управляющей логики, который генерирует и обеспечивает соблюдение графиков остановки, включает в себя гражданские пределы скорости.
23. Система управления поездом по п.14, в которой бортовой контроллер ответственного назначения дополнительно содержит сегмент управляющей логики, который обеспечивает по меньшей мере одну из операции абсолютной остановки и операции остановки и продолжения.
24. Система управления поездом по п.23, в которой упомянутый сегмент управляющей логики использует параметр базы данных ответственного назначения, который разрешает по меньшей мере одну из операции абсолютной остановки и операции остановки и продолжения.
25. Система управления поездом по п.24, в которой упомянутый параметр базы данных активируется через подсистему автоматического отслеживания поезда.
26. Способ для бортового контроллера, который взаимодействует с путевой установкой локомотивной сигнализации, содержащий выполняемые на борту этапы:
определения местоположения поезда,
преобразования кодов скорости, принимаемых от путевых устройств локомотивной сигнализации, в пределы разрешенного движения и
генерации и обеспечения соблюдения графиков остановки, основанных на упомянутых пределах разрешенного движения,
при этом преобразование является динамическим процессом, при котором предел разрешенного движения усекается в случае, если принятый код скорости локомотивной сигнализации является более ограничительным, и предел разрешенного движения расширяется в случае, если принятый код скорости локомотивной сигнализации является более разрешительным.
27. Бортовой контроллер поезда, который взаимодействует с путевым оборудованием локомотивной сигнализации, причем бортовой контроллер содержит
бортовую подсистему определения местоположения,
бортовое устройство интерфейса, которое принимает коды скорости от упомянутого путевого оборудования локомотивной сигнализации,
бортовой процессор со считываемым компьютером носителем информации, закодированным управляющей логикой для управления движением поезда,
сегмент управляющей логики, который преобразует коды скорости, принимаемые от путевого оборудования локомотивной сигнализации, в пределы разрешенного движения, и
сегмент управляющей логики, который генерирует и обеспечивает соблюдение графиков остановки, которые основаны на упомянутых пределах разрешенного движения,
при этом преобразование является динамическим процессом, при котором предел разрешенного движения усекается в случае, если принятый код скорости локомотивной сигнализации является более ограничительным, и предел разрешенного движения расширяется в случае, если принятый код скорости локомотивной сигнализации является более разрешительным.
28. Бортовой контроллер поезда по п.27, в котором упомянутый сегмент управляющей логики, который преобразует коды скорости, принимаемые от путевого оборудования локомотивной сигнализации, в пределы разрешенного движения, использует справочные таблицы.
29. Бортовой контроллер поезда по п.27, дополнительно содержащий модуль обмена данными, который осуществляет обмен данными с зональным контроллером.
30. Бортовой контроллер поезда по п.27, дополнительно содержащий модуль обмена данными, который осуществляет обмен данными с подсистемой автоматического отслеживания поезда.
31. Система управления поездом, которая интегрирует бортовое устройство управления поездом на основе обмена данными с путевым оборудованием локомотивной сигнализации, при этом бортовое устройство управления поездом на основе обмена данными содержит
бортовую подсистему определения местоположении на основе приемопередатчика,
бортовое устройство интерфейса, которое принимает коды скорости от упомянутого путевого оборудования локомотивной сигнализации,
бортовое средство для преобразования упомянутых кодов скорости в пределы разрешенного движения и
бортовое средство для генерации и обеспечения соблюдения графиков остановки, которые соответствуют упомянутым пределам разрешенного движения,
при этом преобразование является динамическим процессом, при котором предел разрешенного движения усекается в случае, если принятый код скорости локомотивной сигнализации является более ограничительным, и предел разрешенного движения расширяется в случае, если принятый код скорости локомотивной сигнализации является более разрешительным.
| US 5452870 A, 26.09.1995 | |||
| US 4566067 A, 21.01.1986 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| Прибор для измерения профилей самолетных частей | 1925 |
|
SU2101A1 |

