Изобретение относится к железнодорожной автоматике и телемеханике и может быть использовано в системах интервального регулирования движения поездов.
Известно техническое решение, которое используется в системах интервального регулирования движения поездов представляет собой комплексное локомотивное устройство безопасности, содержащее включенные в систему реального времени с модульной архитектурой и соединенные между собой внутренним CAN интерфейсом блок электроники локомотивный, блок индикации локомотивный, блок коммутации и регистрации, блок регистрации, блок индикации скорости, блок индикации локомотивный помощника машиниста, блок согласования интерфейсов, шлюз, при этом блок электроники выполнен с возможностью приема и обработки сигналов от приемных катушек АЛСН и АЛС-ЕН, датчиков пути и скорости, антенны спутниковой навигационной системы, сигнала о положении ключа электропневматического клапана, сигналов от управляющих устройств локомотива, а также контроля и организации режима обмена информацией с другими устройствами с помощью внутреннего CAN интерфейса, организации режима обмена информацией с радиомодемом по цифровому интерфейсу и формирования сигнала управления электропневматическим клапаном, и включает в себя подключенные к внутреннему CAN интерфейсу двухканальный модуль центральной обработки, модуль электронной карты, модуль радиоканала, двухканальный модуль внешнего устройства и двухканальный модуль измерителя параметров движения, причем дополнительные входы/выходы модуля центральной обработки соединены с соответствующими входами/выходами системы безопасности, выход которой соединен с усилителем электропневматического клапана, связанного с электропневматическим клапаном, вход модуля спутниковой навигационной системы соединен с антенной спутниковой навигационной системы, а соответствующий выход соединен с модулем электронной карты, выход которой соединен с модулем радиоканала, входы/выходы которого соединены с радиомодемом, подключенным к дуплексному фильтру, соединенному с радиоантенной, входы блока внешних соединений соединены с датчиками пути и скорости, выходы которого соединены с соответствующими входами модуля коммутации и подключения, выходы которого подключены к входам двухканального модуля измерителя параметров движения, а двухканальный модуль внешнего устройства соединен с приемными катушками АЛСН и АЛС-ЕН, блок индикации локомотивный выполнен с возможностью подготовки и индикации информации, взаимодействия с машинистом посредством рукояток бдительности, ввода и отображения локомотивных и поездных характеристик, а также отображения сигналов светофоров и свободных блок-участков, текущего времени, времени движения по графику, фактической скорости, допустимой скорости, рекомендуемой скорости, целевой скорости, ускорения, режима работы, частоты канала АЛСН или индикатора работы канала АЛС-ЕН, отображения железнодорожных координат, названий впередилежащих объектов следования и расстояния до них, данных с датчиков давления в тормозной магистрали, датчиков давления тормозного цилиндра и датчиков давления уравнительного резервуара, кроме того, технологической информации, необходимой для диагностики системы, индикации режима записи на кассету регистрации, и включает в себя подключенные к внутреннему CAN интерфейсу плату управления дисплеем, соединенную с дисплеем TFT, плату управления модулем светофоров, соединенную с модулем индикации светофоров, модуль ввода, входы которого соединены с рукоятками бдительности и клавиатурой, блок коммутации и регистрации выполнен с возможностью обработки данных от локомотивных устройств, данных с датчика давления в тормозной магистрали, датчика давления тормозного цилиндра и датчика давления уравнительного резервуара, выполнения служебного и принудительного торможения, а также для включения питания устройства, и включает в себя подключенное к внутреннему CAN интерфейсу устройство формирования и регистрации, входы которого соединены с устройствами локомотива с аналоговыми выходами, датчиком давления в тормозной магистрали, датчиком давления тормозного цилиндра и датчиком давления уравнительного резервуара, вход/выход подключен к плате управления, соединенной с платой реле, выходы которой соединены с электропневматическим вентилем, песочницей локомотива, с тормозным и отпускным вентилями приставки крана машиниста, и блоком контроля несанкционированного отключения ключа электропневматического клапана, выход которого подключен к электропневматическому клапану, блок регистрации включает в себя подключенный к внутреннему CAN интерфейсу модуль регистрации, соединенный с кассетой регистрации, блок согласования интерфейсов включает в себя подключенный к внутреннему CAN интерфейсу модуль обработки сигналов, вход/выход которого соединен с модулем развязки, входы которого подключены к телемеханической системе контроля бодрствования машиниста, тревожным кнопкам, а входы/выходы - к системе автоматического управления торможением, шлюз включает в себя устройство управления, соответствующие входы/выходы которого соединены с преобразователем внутреннего CAN интерфейса, подключенного к внутреннему CAN интерфейсу, также с преобразователем внешнего CAN интерфейса, подключенного к внешнему CAN интерфейсу, и с преобразователем интерфейса локомотива, подключенного к интерфейсу локомотива (RU 2420418, B61L 25/00, 10.06.2011).
Недостаток известного технического решения связан с отсутствием в нем отказоустойчивых алгоритмов при кратковременных сбоях в работе спутниковой навигации или автоматической локомотивной сигнализации, а также отсутствием возможности приема двухчастотного сигнала из рельсопроводного канала связи.
В качестве прототипа принят способ интервального регулирования движения поездов с применением координатных отрезков без блок-участков и путевых светофоров, заключающийся в том, что участок железнодорожного пути разбивают на отдельные участки – координатные отрезки, каждый из которых оборудуют одной рельсовой цепью и/или ограждают с двух сторон счетчиками осей; передают на поезда к бортовой аппаратуре сигналы; контролируют бдительность машиниста; при этом при превышении максимально допустимой скорости, если не начато полное служебное торможение, или при отсутствии подтверждения бдительности машиниста бортовой аппаратурой автоматически начинается автостопное торможение, длину каждого координатного отрезка выбирают меньшей длины тормозного пути поезда; для каждого координатного отрезка определяют суммарную длину впередилежащих по направлению движения координатных отрезков до ближайшего занятого координатного отрезка и определяют целевую скорость как наибольшую скорость, при которой в суммарную длину впередилежащих по направлению движения координатных отрезков до ближайшего занятого координатного отрезка укладываются длины всех трех тормозных путей поезда при: служебном, полном служебном и автостопном торможениях; при этом передают к бортовой аппаратуре информацию о численном значении целевой скорости для координатных отрезков, а бортовой аппаратурой принимают и обрабатывают информацию о численном значении целевой скорости для координатного отрезка, на котором располагается голова рассматриваемого поезда; при переходе на следующий по направлению движения координатный отрезок бортовой аппаратурой сохраняют значение целевой скорости для предыдущего координатного отрезка, которую считают максимально допустимой скоростью движения для рассматриваемого координатного отрезка до тех пор, пока целевая скорость для рассматриваемого координатного отрезка меньше или равна целевой скорости для предыдущего координатного отрезка (RU 2789232, B61L 23/18, 31.01.2023).
Известный способ не обеспечивает достаточную пропускную способность из-за отсутствия возможности движения по координатным отрезкам в границах станции, получения информации от напольных и постовых устройств электрической или микропроцессорной централизации станции, очного позиционирования на координатных отрезках, получения информации о расстоянии до актуального препятствия и отсутствия возможности движения поезда по защитным участкам по сигналам АЛС-ЕН.
Технический результат изобретения заключается в повышении пропускной способности.
Технический результат достигается тем, что способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров включает прием кодового сигнала АЛС из рельсовых цепей, вычисление в бортовой аппаратуре локомотива допустимой скорости поезда на основе полученной из кодового сигнала АЛС информации о количестве свободных рельсовых цепей между головой поезда и хвостом состава предыдущего поезда или целевым местом ограничения скорости, причем из этих рельсовых цепей, имеющих уникальные кодовые номера, за хвостом впереди идущего поезда формируют подвижный блок-участок, при этом значение допустимой скорости поезда рассчитывают в зависимости от расстояния до цели, её вида, временных и постоянных ограничений скорости, уклона, величины тормозного коэффициента и категории поезда, а бортовая аппаратура получает информацию о состоянии станционных объектов по рельсопроводному каналу и/или радиоканалу или с помощью шлейфовых датчиков, при этом допускается заезд на некодируемый участок за хвостом впереди идущего поезда при наличии информации из вычислительного центра, о карте маршрута, о координате головы впереди идущего поезда, полученной от спутникового навигатора и переданной в центр, и информации о целостности впереди идущего поезда, причем информацию о точке прицельной остановке получают по радиоканалу из вычислительного центра в качестве разрешения на движение с учетом длины состава.
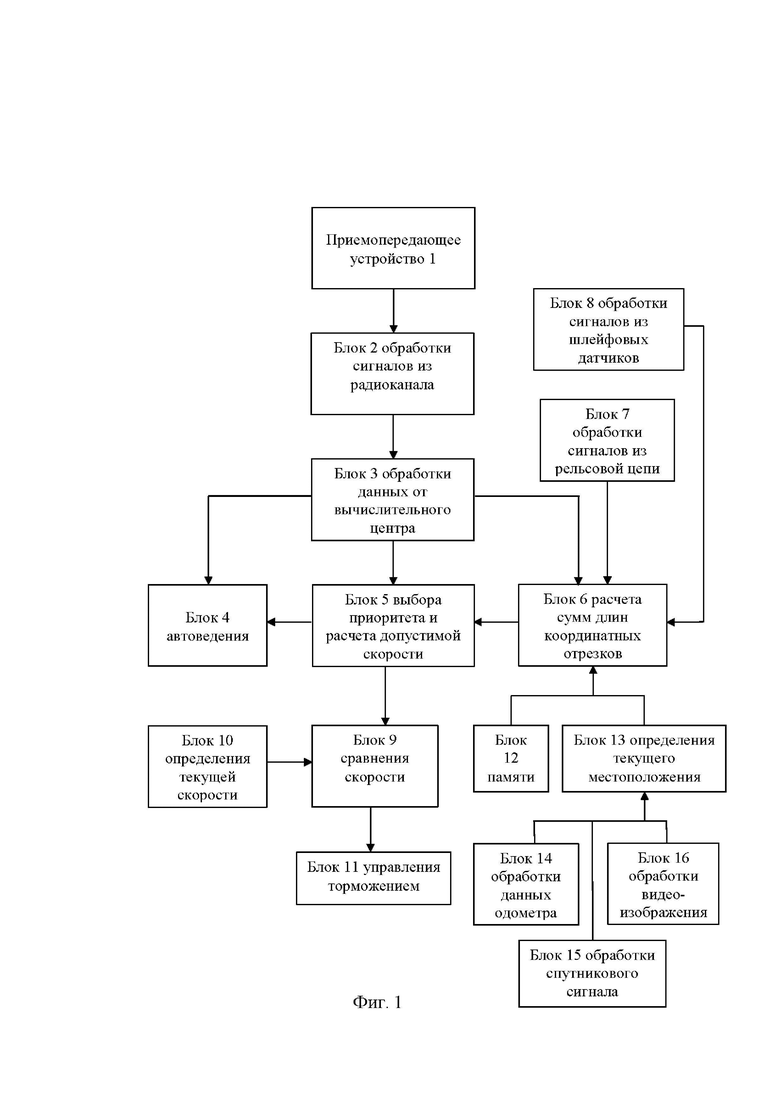
На чертеже (фиг.1) приведена структурная схема бортовой аппаратуры локомотива поезда, используемой для реализации предлагаемого способа.
Бортовая аппаратура локомотива поезда содержит приемопередающее устройство 1, соединенное через блок 2 обработки сигналов из радиоканала с блоком 3 обработки данных от вычислительного центра, выходы которого соединены соответственно с первым входом блока 4 автоведения, первым входом блока 5 выбора приоритета и расчета допустимой скорости и первым входом блока 6 расчета сумм длин координатных отрезков, второй и третий входы которого соединены соответственно с блоком 7 обработки сигналов из рельсовой цепи и с блоком 8 обработки сигналов из шлейфовых датчиков, а его выход подключен ко второму входу блока 5 выбора приоритета и расчета допустимой скорости, первый и второй выходы которого соединены соответственно со вторым входом блока 4 автоведения и первым входом блока 9 сравнения скорости, ко второму входу которого подключен блок 10 определения текущей скорости, а его выход соединен с блоком 11 управления торможением, четвертый вход блока 6 расчета сумм длин координатных отрезков соединен с блоком 12 памяти и блоком 13 определения текущего местоположения, ко входу которого подключены блок 14 обработки данных одометра, блок 15 обработки спутникового сигнала и блок 16 обработки видеоизображения.
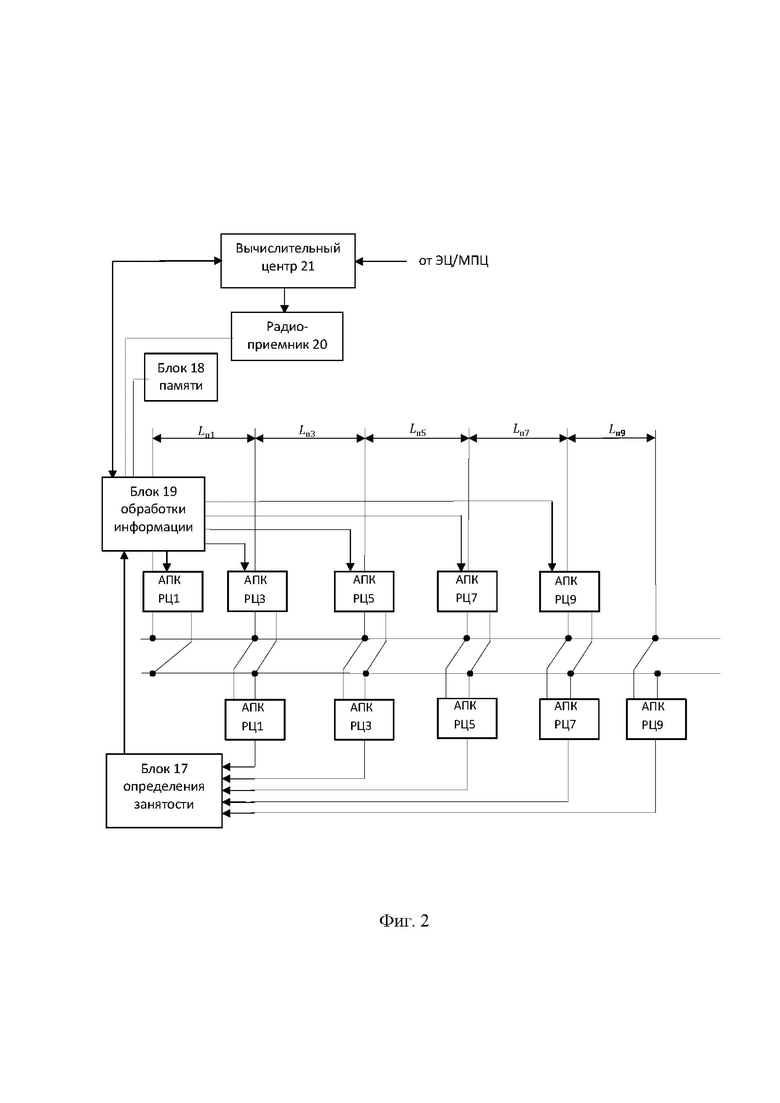
На фиг.2 приведена структурная схема путевой аппаратуры, используемой для реализации предлагаемого способа.
Участок железнодорожного пути разбит на координатные отрезки  каждый из которых меньше длины тормозного пути. Каждый координатный отрезок оборудован рельсовыми цепями, включающие напольную аппаратуру питающего конца и релейного конца (АПК РЦ1 ÷ АПК РЦ9). Релейные концы соединены с блоком 17 определения занятости. Блок 17 определения занятости и блок 18 памяти соединены с блоком 19 обработки информации, который соединен с питающим концом рельсовой цепи. Блок 19 обработки информации подключен к радиоприемнику 20 и вычислительному центру 21, который является вычислительным стационарным устройством, с подключенными к нему устройствами СЦБ и радиоканалом.
каждый из которых меньше длины тормозного пути. Каждый координатный отрезок оборудован рельсовыми цепями, включающие напольную аппаратуру питающего конца и релейного конца (АПК РЦ1 ÷ АПК РЦ9). Релейные концы соединены с блоком 17 определения занятости. Блок 17 определения занятости и блок 18 памяти соединены с блоком 19 обработки информации, который соединен с питающим концом рельсовой цепи. Блок 19 обработки информации подключен к радиоприемнику 20 и вычислительному центру 21, который является вычислительным стационарным устройством, с подключенными к нему устройствами СЦБ и радиоканалом.
Устройство, реализующее способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров, функционирует следующим образом.
Бортовая аппаратура получает из рельсовых цепей или радиоканала информацию о количестве свободных координатных блок-участков/отрезков до впереди идущего поезда или собранном маршруте приема на станцию. Информация может быть получена из бесстыковых рельсовых цепей в том числе посредством двухчастотной локомотивной сигнализации АЛС-ЕН, когда рельсовые цепи, например, верхней половины путей по плану станции имеют частоту сигнального тока 175ГЦ, а нижней половины 275ГЦ. Это расширяет объём уникальных используемых кодовых комбинаций в 2 раза, и соответственно делает возможным кодирование маршрутов необходимой сложности. При этом расширяется возможность для плавного нормирования скорости по нескольким последовательным рельсовым цепям, на которые можно разбить длинный защитный некодируемый участок, находящийся на бесстыковой рельсовой цепи.
Стационарная аппаратура взаимодействует с бортовой аппаратурой посредством радиоканала и рельсопроводного канала. Бортовая аппаратура содержит блок 5 выбора приоритета и расчета допустимой скорости, который получает информацию от блока 3 обработки данных от вычислительного центра. Блок 6 расчета сумм длин координатных отрезков получает информацию от блока 7 обработки сигналов из рельсовой цепи, блока 12 памяти и блока 13 определения текущего местоположения, на который поступает информация от блока 14 обработки данных одометра, блока 15 обработки спутникового сигнала и блока 16 обработки видеоизображения. Блок 3 обработки данных от вычислительного центра получает информацию от блока 2 обработки сигналов из радиоканала, который в свою очередь соединен с радиоприемником приемопередающего устройства 1. Блок 3 обработки данных от вычислительного центра 21 передает информацию в блок 5 выбора приоритета и расчета допустимой скорости и блок 4 автоведения.
Стационарная аппаратура опрашивает релейные концы рельсовых цепей блоком 17 определения занятости, который собирает информацию о занятости рельсовой цепи и передает данную информацию в блок 19 обработки информации, который соединен с блоком 18 памяти и радиоприемником 20. Блок 18 памяти содержит информацию о последовательности рельсовых цепей. Блок 19 обработки информации формирует информацию о количестве занятых координатных отрезков индивидуально каждому поезду и передает данную информацию в рельсовую цепь и/или радиоканал. Блок 19 обработки информации соединен с вычислительным центром 21, который представляет собой аппаратно-программный комплекс, подключенный к электрической централизации (ЭЦ) или микропроцессорной централизации (МПЦ) для получения информации о состоянии напольного оборудования и для формирования разрешения на движение и к радиоканалу для передачи на бортовую аппаратуру. Вычислительный центр 21 выдает разрешение на движение всем поездам, находящимся в зоне обслуживания в зависимости от поездной обстановки, и с учетом оптимального использования доступных энергоресурсов участка пути.
В бортовой аппаратуре расчет допустимой скорости производится по данным, полученным из нескольких источников: из радиоканала и из рельсопроводного канала. Локомотивное оборудование определяет для каждого момента времени суммарную длину свободных координатных отрезков и определяет своё местоположение на координатном отрезке относительно его начала. Информация из рельсопроводного канала поступает в блок 7 обработки сигналов из рельсовой цепи для определения числа свободных участков пути. Данная информация передается в блок 6 расчета сумм длин координатных отрезков, в котором происходит определение препятствий впереди локомотива на основании данных, полученных от блока 12 памяти о длинах координатных участков (блок-участков) и данных, полученных от блока 13 определения текущего местоположения поезда, который определяет свое местоположение основываясь на данных о географической координате, полученных от блока 15 обработки спутникового сигнала, данных о пройденном расстоянии и данных о местоположении, полученных в результате обработки видеоизображения окружающей среды, полученных от блока 16 обработки видеоизображения. Бортовая аппаратура взаимодействует с радиоканалом для получения разрешения на движение. Информация о допустимом безопасном расстоянии поступает от вычислительного центра через радиоканал в блок 2 обработки сигналов из радиоканала и далее в блок 3 обработки данных от вычислительного центра 21, где происходит обработка информации о допустимом для проследования расстоянии и эти данные поступают в блок 6 расчета сумм длин координатных отрезков, который определяет список актуальных препятствий и расстояний до них и передает данную информацию в блок 5 выбора приоритета и расчета допустимой скорости, в котором происходит расчет допустимой скорости для каждого из препятствий и определяется препятствие с наибольшим приоритетом и дающее наименьшее ограничение скорости и передает информацию о допустимой скорости в блок 9 сравнения скорости. Этот блок получает информацию о текущей скорости от блока 10 определения текущей скорости и сравнивает допустимую скорость и текущую. При превышении допустимой скорости происходит передача сигнала в блок 11 управления торможением о необходимости применения торможения.
Одним из источников информации является вычислительный центр, который при подъезде к станции заблаговременно может передавать маршрут приема. Он подключен к электрической централизации и опрашивает положение стрелок в маршруте или подключается к микропроцессорной централизации и получает собранный маршрут. Вычислительный центр передает информацию о собранном маршруте по радиоканалу на бортовую аппаратуру, где информация о маршруте приема поступает в блок 2 обработки сигналов из радиоканала и далее в блок 3 обработки данных от вычислительного центра, который определяет актуальное препятствие и расстояния до него, ограничения скорости и уклоны. Данная информация передается в блок 4 автоведения для выбора необходимых скоростей и режима движения и в блок 6 расчета сумм длин координатных отрезков. Расчетная допустимая скорость через блок 5 выбора приоритета и расчета допустимой скорости передается в блок 9 сравнения скорости, где сравнивается с текущей. В случае превышения текущей над допустимой сигнал с блока 11 управления торможением передается на исполнительное устройство. При эксплуатации данной технологии критически важно соответствие станционной и локомотивной базы данных. Поэтому для защиты от исполнения ложных и неактуальных данных сравнивается также версия базы передаваемых данных в радиоэфир и версия базы локомотивной аппаратуры.
Дополнительно происходит взаимодействие с шлейфовыми датчиками для уточнения маршрута приема и калибровки показаний одометра. Калибровка может быть произведена по контрольным точкам на основании видеоизображения и по смене уровня сигнала в рельсовых цепях.
Дополнительно при фиксации неисправности, приводящей к обесточиванию путевого реле, возможна реализация функции логической реконфигурации рельсовой цепи. В блок обработки поступает информация о наличии ложно-занятой рельсовой цепи. Данная информация по радиоканалу передается на бортовую аппаратуру. Блок 2 обработки сигналов из радиоканала обрабатывает данный сигнал и передает его в блок 3 обработки данных от вычислительного центра и далее в блок 6 расчета сумм длин координатных отрезков, где происходит анализ информации и определение местоположения сбойного участка и скорости с которой допускается проследование. Далее данная информация поступает в блок 5 выбора приоритета и расчета допустимой скорости, где по заложенным алгоритмам определяется наименьшая из допустимых скоростей, принимаемая к отображению и контролю.
Имея данные о своем местоположении, о длинах всех координатных отрезков на пути, уклонах, об эффективности торможения, о временных или постоянных ограничениях бортовая аппаратура рассчитывает максимально допустимую скорость движения и строит кривую автостопного торможения. Максимально допустимая скорость рассчитывается до занятого координатного отрезка пути, учитывая защитный координатный участок перед занятым координатным отрезком. Бортовая аппаратура сравнивает расчетную скорость с фактической скоростью и, при превышении фактической скорости, автоматически включает автостопное торможение.
В блоке 12 памяти (база данных локомотива) хранится информация о всех препятствиях на пути и протяженности данных препятствий (для рельсовых цепей или блок участков, для участков с ограничением скорости и т.д.), при этом бортовой аппаратурой вычисляется допустимая скорость сразу к нескольким ближайшим препятствиям, для каждого препятствия рассчитывается допустимая скорость и выбирается наименышая из рассчитанных скоростей. Дополнительно при наличии информации о целостности впереди идущего состава и информации о его местоположении и длине допускается заезд на защитный участок.
В случае приема информации о желтом показании первого по ходу движения виртуального светофора, рассчитывается допустимая скорость к этому светофору и следующему светофору по ходу движения, в работу принимается наименышая из полученных допустимых скоростей. Информация об актуальном препятствии может быть получена из радиоканала, из рельсопроводного канала, в том числе посредством двухчастотной локомотивной сигнализации АЛС-ЕН либо с помощью шлейфового датчика или аналогичного датчика. При этом информация о точном местоположении головы поезда определяется с помощью спутниковой навигации, одометра или систем видеонаблюдения и аналогичных систем. Калибровка осевого датчика и сброс накопленной ошибки производится по специальным данным в виде смены уровня и значения сигналов рельсовых цепей или по видеоизображению, а также при проследовании шлейфового датчика. Калибровка тормозного коэффициента, как показателя эффективности торможения, может производится при каждом фактически выполненном торможении и учитывает реальное состояние тормозной системы и внешних факторов. Кроме того, по радиоканалу может быть получена информация о прогнозируемом тормозном коэффициенте с учетом изменяемых климатических условий.
Дополнительно при приеме на станцию заблаговременно передается информация о маршруте приема по радиоканалу. При этом информация о маршруте может быть также передана с помощью шлейфового датчика или аналогичного датчика.
Технический результат повышения пропускной способности также достигается за счет реализации отказоустойчивых алгоритмов в случае кратковременных сбоев. Так, в случае появления белого огня на локомотивном светофоре, при следовании по станции, производится расчет расстояния до ближайшего по ходу движения светофора из локомотивной базы данных и снижение допустимой скорости по кривой автостопного торможения до 0 км/ч за 20 м до этого светофора с возможностью проследования светофора после ручного ввода специализированной команды. Если после проследования светофора, к которому ранее строилась кривая торможения, на локомотивном светофоре бортовой аппаратуры сохранится белый огонь, алгоритм снижения скорости на не кодируемом участке пути будет выполняться повторно к следующему светофору из локомотивной базы данных. При этом отменяется действие команды, введенной вручную ранее и к следующему светофору снова будет строиться кривая торможения.
В случае внезапного появления белого огня на локомотивном светофоре на перегоне без путевых светофоров снижение скорости до фиксированного значения производится не скачкообразно, а плавно по щадящим алгоритмам, учитывая текущую скорость состава. Данный механизм необходим для снижения числа неоправданных автостопных торможений. В случае отсутствия информации об актуальном препятствии и информации о длинах координатных отрезков бортовая аппаратура запоминает предыдущее актуальное препятствие и продолжает рассчитывать допустимую скорость к нему. После проследования препятствия движение происходит на основании данных, записанных в постоянную память о средней величине координатного отрезка и под ответственность машиниста. При потере сигнала спутниковой навигации, например, в туннеле определение текущего местоположения производится по данным одометра, аппроксимируя данные. Калибровка данных производится по изменению уровня сигнала из рельсопроводного канала при проследовании путевого генератора рельсовой цепи.
В случае неисправности, приводящей к обесточиванию путевого реле, информация передается в бортовую аппаратуру по радиоканалу. В случае получения такой информации допускается безостановочное проследование участка с ограниченной скоростью, данный способ позволяет избежать остановки поезда и существенного снижения пропускной способности участка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования движения поездов | 2023 |
|
RU2806466C1 |
| Устройство для регулирования движения поездов | 2018 |
|
RU2679795C1 |
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ | 2010 |
|
RU2429153C1 |
| Система для регулирования движения поездов | 2022 |
|
RU2791774C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ БЕЗ БЛОК-УЧАСТКОВ И ПУТЕВЫХ СВЕТОФОРОВ | 2021 |
|
RU2789232C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2768303C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ, ДОПУСКАЮЩИЙ НАХОЖДЕНИЕ ДВУХ ПОЕЗДОВ НА ОДНОМ БЛОК-УЧАСТКЕ, СОСТОЯЩЕМ ИЗ НЕСКОЛЬКИХ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2768305C1 |
| Система поддержания интервала разграничения между последовательно движущимися поездами | 2024 |
|
RU2839168C1 |
| Способ управления поездами при их последовательном отправлении со станции | 2021 |
|
RU2757131C1 |
Изобретение относится к управлению движением на железных дорогах. Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров заключается в том, что принимают кодовый сигнал АЛС из рельсовых цепей, вычисляют в бортовой аппаратуре локомотива допустимую скорость поезда. Причем из рельсовых цепей за хвостом впереди идущего поезда формируют подвижный блок-участок. Значение допустимой скорости поезда рассчитывают в зависимости от расстояния до цели, ее вида, временных и постоянных ограничений скорости, уклона, величины тормозного коэффициента и категории поезда. Бортовая аппаратура получает информацию о состоянии станционных объектов по рельсопроводному каналу и/или радиоканалу или с помощью шлейфовых датчиков. Допускается заезд на некодируемый участок при наличии информации из вычислительного центра о карте маршрута, о координате головы впереди идущего поезда и информации о целостности впереди идущего поезда. Информацию о точке прицельной остановки получают по радиоканалу из вычислительного центра в качестве разрешения на движение с учетом длины состава и защитного участка. Технический результат заключается в повышении пропускной способности. 6 з.п. ф-лы, 2 ил.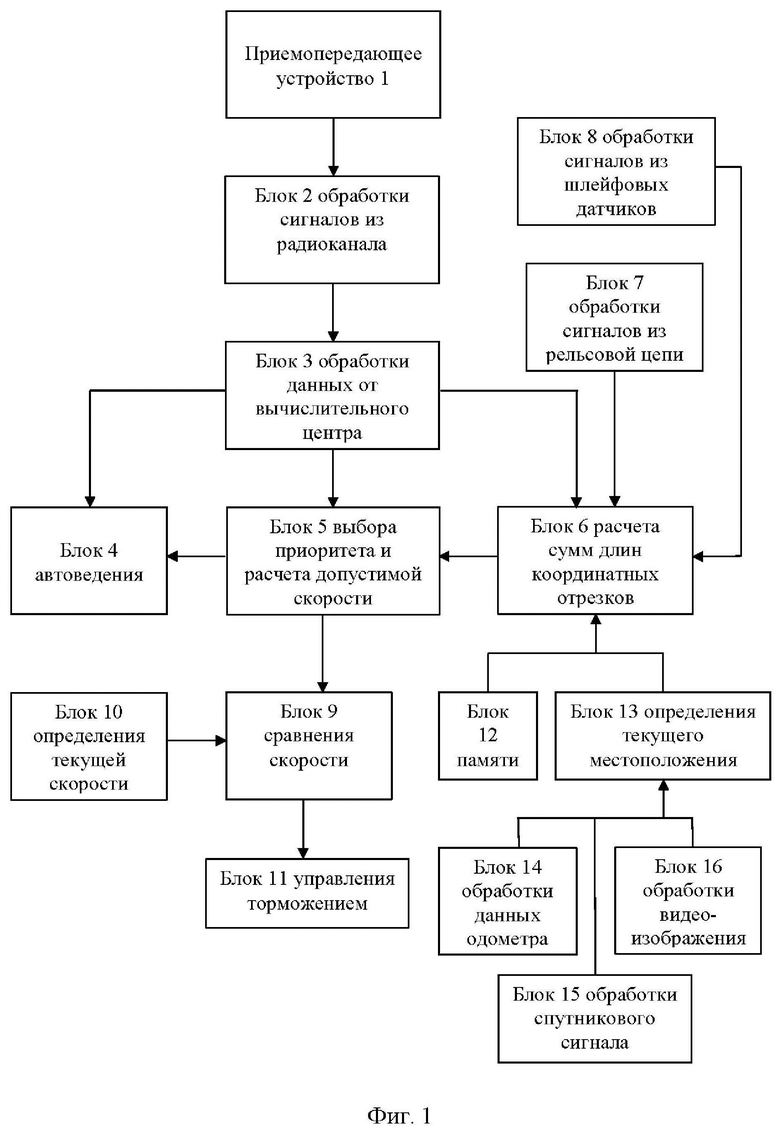
1. Способ интервального регулирования движения поездов с использованием подвижных координатных отрезков на участках без путевых светофоров, включающий прием кодового сигнала АЛС из рельсовых цепей, вычисление в бортовой аппаратуре локомотива допустимой скорости поезда на основе полученной из кодового сигнала АЛС информации о количестве свободных рельсовых цепей между головой поезда и хвостом состава идущего впереди поезда или целевым местом ограничения скорости, причем из этих рельсовых цепей, имеющих уникальные кодовые номера, за хвостом впереди идущего поезда формируют подвижный блок-участок, при этом значение допустимой скорости поезда рассчитывают в зависимости от расстояния до цели, ее вида, временных и постоянных ограничений скорости, уклона, величины тормозного коэффициента и категории поезда, а бортовая аппаратура получает информацию о состоянии станционных объектов по рельсопроводному каналу и/или радиоканалу или с помощью шлейфовых датчиков, при этом допускается заезд на некодируемый участок за хвостом впереди идущего поезда при наличии информации из вычислительного центра о карте маршрута, о координате головы впереди идущего поезда, полученной от спутникового навигатора и переданной в центр, и информации о целостности впереди идущего поезда, причем информацию о точке прицельной остановки получают по радиоканалу из вычислительного центра в качестве разрешения на движение с учетом длины состава и защитного участка.
2. Способ по п.1, отличающийся тем, что информацию о расстоянии до актуальной цели, ее виде и временных ограничениях передают на бортовую аппаратуру по радиоканалу из вычислительного центра.
3. Способ по п.1, отличающийся тем, что вычисление допустимой скорости производится по данным, полученным от одного и более источников информации о свободности путевых участков, а передачу данных о допустимой скорости осуществляют по рельсопроводному или радиоканалу.
4. Способ по п.1, отличающийся тем, что расчет допустимой скорости производится одновременно по нескольким ограничениям и/или препятствиям, информацию о которых принимают из рельсопроводных линий, от шлейфовых датчиков или из радиоканала, и для каждого ограничения рассчитывается допустимая скорость, а к отображению и контролю принимается наименьшая из рассчитанных скоростей движения.
5. Способ по п.1, отличающийся тем, что определение точной координаты поезда осуществляют по информации от спутникового навигатора, по показаниям одометра и от системы видеонаблюдения, при сбое в одном из источников информации до его прекращения используют информацию по показаниям одометра.
6. Способ по п.1, отличающийся тем, что расчет допустимой скорости производят с учетом фактической эффективности тормозов по предыдущему измерению или по прогнозируемому поведению с учетом информации о погодных условиях, поступающей из вычислительного центра.
7. Способ по п.1, отличающийся тем, что информация о поездной обстановке передается по бесстыковым рельсовым цепям с использованием двухчастотной локомотивной сигнализации АЛС-ЕН.
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ БЕЗ БЛОК-УЧАСТКОВ И ПУТЕВЫХ СВЕТОФОРОВ | 2021 |
|
RU2789232C1 |
| RU 138441 U1, 20.03.2014 | |||
| Система интервального регулирования движения поездов | 2021 |
|
RU2776133C1 |
| EP 3225500 A1, 04.10.2017. | |||

