Изобретение относится к области железнодорожной автоматики телемеханики и связи и может быть использовано на локомотивах и моторвагонных подвижных составах, а также в системах интервального регулирования движения поездов с использованием радиоканала.
Известно устройство контроля за управлением поезда, в которых уточнение координаты места нахождения поезда, определяемого с помощью колесного датчика пройденного пути, производят посредством обнаружения с помощью бортовых датчиков обнаружения элементов путевой инфраструктуры с заранее известными координатами, записанными в электронной карте маршрута, находящейся в электронной памяти устройства (WO 0166401, B61L 25/02, 13.09.01). Необходимость уточнения координаты обусловлена тем, что из-за юза и боксования, а также износа бандажа колес накапливается погрешность в измерении пройденного пути с помощью колесного датчика.
Недостатком известного устройства является усложнение бортового устройства и алгоритмов обработки для надежного определения соответствия между принимаемыми сигналами и находящимися на пути элементами инфраструктуры. Например, на надежной работе вихретоковых датчиков обнаружения металлических элементов крепления на шпалах отрицательно сказывается высокая скорость движения и повышенные электромагнитные помехи, создаваемые, например, тиристорным регулятором мощности на локомотивах.
Известно устройство контроля за управлением поезда, в котором уточнение координаты места нахождения поезда, нормально определяемой с помощью колесного датчика пройденного пути, производят по сигналам от радиомаяков (бализов), установленных на пути и передающих на проходящие локомотивы координаты своего местоположения (СА 2520605, B61L 25/02, 30.03.06).
Недостатком известного устройства является усложнение путевых устройств и снижение защищенности системы от повреждающих факторов внешней среды, в частности, от вандализма.
Наиболее близким устройством, выбранным в качестве прототипа, является устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу модуль маршрута и модуль радиоканала, которые своими портами соединены соответственно с портом приемника спутниковой навигации, к входу которого подключена антенна спутниковой навигации, и с портом радиомодема, соединенного с радиоантенной, блок вычисления координаты местонахождения локомотива, подключенный к межмодульному интерфейсу. В устройстве для устранения ложных переключений с АЛС-ЕН на АЛСН при кратковременных пропаданиях сигналов от навигационных спутников содержится блок вычисления координаты местонахождения локомотива, подключенный к межмодульному интерфейсу (RU 94943, B61L 25/04, 10.06.10).
В этом устройстве определение текущей координаты местонахождения локомотива и отслеживание его местонахождения по электронной карте маршрута производят с помощью данных от бортового приемника спутниковой навигации и данных от подсистемы измерения пройденного пути по колесным датчикам импульсов с учетом фиксации прохождения границ рельсовых цепей по смене параметров кодового сигнала, поступающего из рельсовых цепей.
При нормальной работе в устройстве используют алгоритм управления движением поезда с непрерывным контролем скорости и систему АЛС-ЕН с функцией прицельной остановки перед определенной координатой пути. Для определения координаты места нахождения локомотива используют данные от приемника спутниковой навигации и электронной карты маршрута, а для точечной коррекции - координаты места нахождения локомотива и изменение параметров кодового сигнала на границах соседних рельсовых цепей. Для измерения пройденного пути и скорости движения используют данные от приемника спутниковой навигации и электронной карты маршрута. В качестве резервного алгоритма при сбоях в подсистемах, ответственных за определение текущей координаты, используется алгоритм со ступенчатым контролем скорости, аналогичный используемому в АЛСН числового кода. При работе по этому алгоритму местонахождение поезда определяется с точностью до рельсовой цепи.
Однако если во время восстановления работы приемника спутниковой навигации после сбоя обнаруживается большое расхождение его данных о текущей координате местонахождения локомотива с расчетными данными блока расчетного определения координаты местонахождения локомотива, невозможно определить, какая подсистема определения текущей координаты имеет необходимую точность. Подсистема на основе колесного датчика может накопить ошибку, например, из-за юза, и/или боксования колес локомотива, а в подсистеме на основе навигационного приемника может произойти сбой из-за воздействия помех. Поэтому момент принятия решения о реальной координате местонахождения локомотива приходится откладывать до определения границы рельсовой цепи по смене параметров кодового сигнала (в АЛС-ЕН смена номера синхрогруппы), а для сохранения требуемого уровня безопасности движения при движении по текущей рельсовой цепи приходится переходить с алгоритма с непрерывным контролем скорости системы АЛС-ЕН на менее безопасный и производительный алгоритм со ступенчатым контролем скорости системы АЛСН. Это снижает безопасность и допустимую скорость движения из-за отсутствия функции прицельного торможения перед границей занятого блок участка, особенно для высокоскоростных поездов.
Технический результат изобретения заключается в повышении безопасности и скорости движения поездов.
Технический результат достигается тем, что в устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу блок вычисления координаты местонахождения локомотива, модуль маршрута, соединенный с приемником спутниковой навигации, и модуль радиоканала, соединенный с радиомодемом, согласно изобретению введен и подключен к межмодульному интерфейсу блок определения относительной координаты местонахождения локомотива внутри очередной рельсовой цепи.
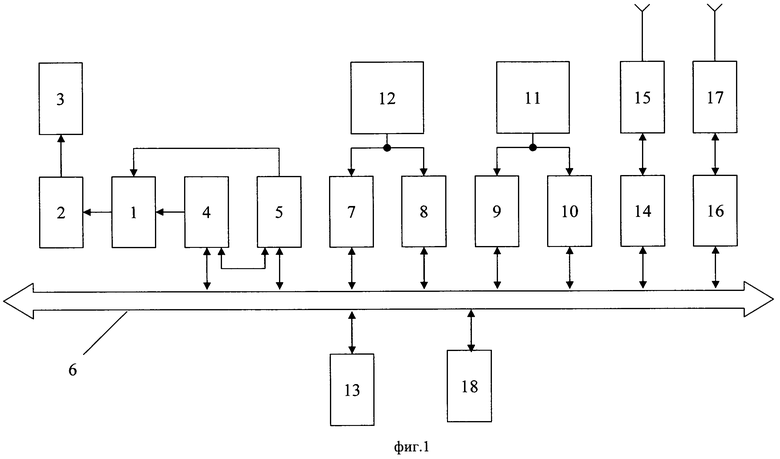
На фиг.1 представлена структурная схема устройства контроля за управлением поезда и бдительностью машиниста.
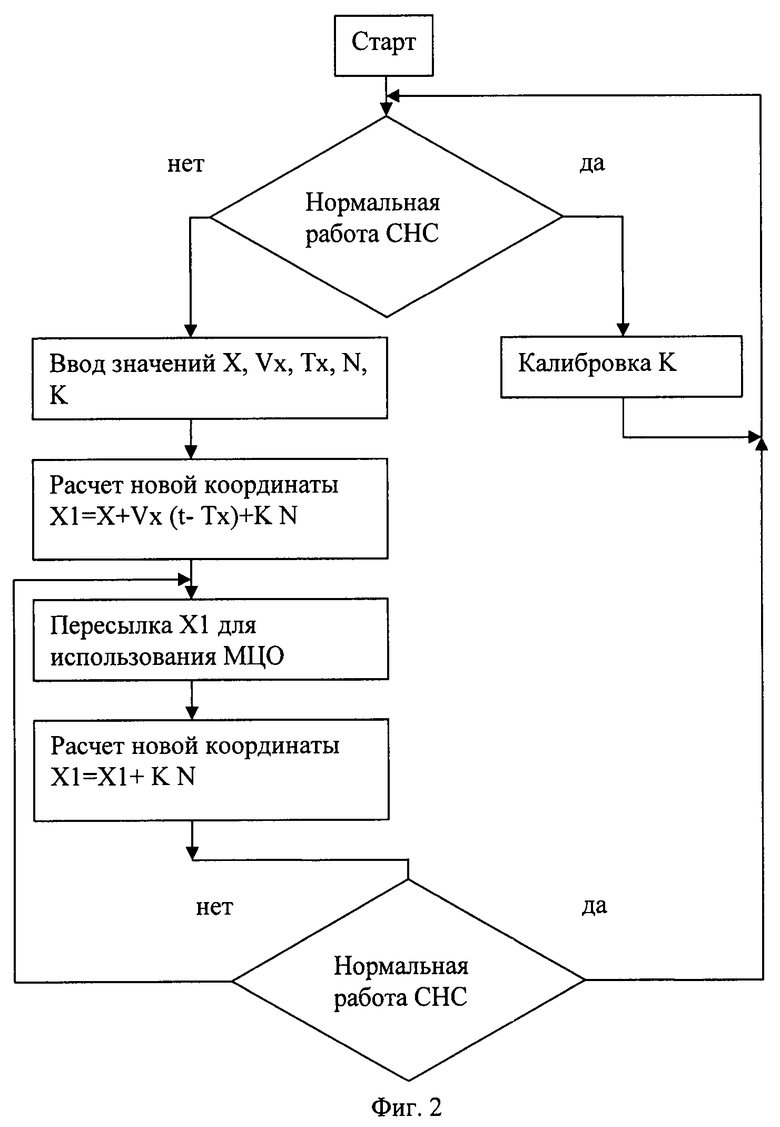
На фиг.2 представлена блок-схема алгоритма для расчетного определения координаты местонахождения локомотива.
Устройство контроля за управлением поезда и бдительностью машиниста содержит блок 1 контроля безопасности, соединенный через усилитель 2 с входом электропневматического клапана 3, входы блока 1 контроля безопасности соединены с выходами модулей 4 и 5 центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу 6, к которому подключены два модуля 7, 8 измерения параметров движения и два модуля 9, 10 непрерывных каналов внешних устройств, входы которых соединены с блоком 11 приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей 7, 8 измерения параметров движения соединены с модулем 12 датчиков пути и скорости, подключенные к межмодульному интерфейсу 6 блок 13 вычисления координаты местонахождения локомотива, модуль 14 маршрута, соединенный с приемником 15 спутниковой навигации, и модуль 16 радиоканала, соединенный с радиомодемом 17, блок 18 определения относительной координаты местонахождения локомотива внутри очередной рельсовой цепи подключен к межмодульному интерфейсу 6.
Устройство контроля за управлением поезда и бдительностью машиниста работает следующим образом.
Перед каждой поездкой локомотива в память модуля 14 маршрута заносится электронная карта маршрута, которая позволяет совместно с данными о текущих координатах местонахождения поезда, поступающими от приемника 15 спутниковой навигации, рассчитать параметры режимов ведения поезда в каждой точке маршрута движения.
Параллельно с расчетами скорости движения и местонахождения поезда по данным от модуля 14 маршрута и приемника 15 спутниковой навигации фактическая скорость поезда и пройденный им путь рассчитывается с помощью модулей 7 и 8 измерения параметров движения на основе данных, поступающих от колесных датчиков модуля 12 датчиков пути и скорости. Блок 13 вычисления координаты местонахождения локомотива работает в соответствии с алгоритмом, блок-схема которого приведена на фиг.2 (указанные на фиг.2 обозначения X, Vx, Тх, N, К использованы при описании работы устройства).
Блок 18 непрерывно определяет относительную координату местонахождения локомотива внутри рельсовой цепи на основе анализа кривой изменения тока в локомотивной катушке по мере движения локомотива от входной границы рельсовой цепи к ее концу. Эта зависимость сопоставляется с расчетом по математической модели, параметры которой определяются блоком 18 после прохождения каждой входной границы рельсовой цепи, которая определяется по смене синхрогрупп кодового сигнала.
В расчетах блока 18 участвуют длина рельсовой цепи, известная по ее номеру из карты маршрута следования поезда, периодические измерения средневыпрямленного значения тока в локомотивных катушках при следовании локомотива от входного к выходному концам рельсовой цепи, расстояние до впереди идущего поезда, определяемое по количеству свободных рельсовых цепей из кодовых сигналов АЛС-ЕН.
Формулы математической модели, которые используются для определения относительной координаты, основаны на теории рельсовых цепей. Примеры базовых формул, из которых могут быть рассчитаны относительные координаты положения поездного шунта на длине рельсовой цепи приведены, например, в журнале Транспорт Урала №1, 2009 (статья Полевой Ю.И. «Локомотивный классификатор свободности неограниченных рельсовых цепей», а также в книге Ю.И. Полевой «Относительные рельсовые цепи» учебное Самара, СамГАПС, 2006.
Общий вид графика изменения средневыпрямленного значения тока в локомотивных катушках при следовании локомотива от входного к выходному концам рельсовой цепи представляет собой экспоненту с начальным значением тока, зависящим от сопротивления балласта, длины рельсовой цепи и напряжения ее источника питания. Подставляя начальные условия в формулы математической модели, блок 18 рассчитывает допуски на текущую координату места нахождения локомотива. Значения допусков обеспечивают оценку доверия к подсистемам определения текущей координаты модулями 4, 5 центральной обработки информации. Если расстояние между поездами становиться меньше допустимого, блок 18 прекращает выдавать информацию в модули 4, 5 центральной обработки информации.
В частности, при существенном расхождении данных от приемника 15 спутниковой навигации и блока 13 вычисления координаты местонахождения локомотива модули 4 и 5 центральной обработки информации определяют правильность работы приемника спутниковой навигации и разрешает переход на определение координаты по приемнику 14 спутниковой навигации, если его данные соответствует допускам, выдаваемым из блока 18. Тем самым предотвращается неоправданный переход от алгоритма с непрерывным контролем скорости системы АЛС-ЕН, на менее безопасный и производительный алгоритм со ступенчатым контролем скорости системы АЛСН.
Модули 4 и 5 центральной обработки информации на основе данных определяют оптимальный скоростной режим, осуществляют контроль бдительности машиниста и в случае несоблюдения скоростного режима или препятствия движению воздействует через блок 1 контроля безопасности и усилитель 2 на электропневматический клапан 3 и производит торможение поезда. При приближении поезда на перегоне к границе занятого блок участка модули 4 и 5 центральной обработки информации осуществляет обязательную остановку поезда и не допускает вступление поезда на занятый блок участок без приема на локомотиве через радиомодем 17 и модуль 16 радиоканала специального сигнала разрешения от диспетчера.
Если происходит сбой из-за пропадания сигналов от навигационных спутников блок 13 вычисления координаты местонахождения локомотива вместо сигнала приемника 15 спутниковой навигации в течение ограниченного по длине отрезка пути с заданной периодичностью вырабатывает информацию о расчетной координате X1 места нахождения локомотива. Для этого он использует подсчет числа N импульсов модуля 12 датчиков пути и скорости, последнее правильное значение Х координаты, полученное от приемника 15 спутниковой навигации и соответствующие этому значению координаты значения текущих времени Тх и скорости Vx движения локомотива. Работа блока 13 вычисления координаты местонахождения локомотива происходит во взаимодействии через межмодульный интерфейс 6 с модулями 4 и 5 центральной обработки информации, модулем 12 датчиков пути и скорости и модулем 14 маршрута.
Это происходит до тех пор, пока не восстановится нормальная работа приемника 15 спутниковой навигации или модули 4 и 5 центральной обработки информации не определят, что погрешность расчетного определения координаты местонахождения локомотива превышает норму, допустимую по условиям безопасности движения. В этом случае осуществляется переход на алгоритм со ступенчатым контролем скорости. Чтобы погрешность накапливалась медленнее, на отрезках пути движения поезда, на которых приемник 15 спутниковой навигации работает нормально, происходит непрерывная подстройка соответствия между пройденным путем, рассчитанным блоком 13 вычисления координаты местонахождения локомотива в режиме калибровки, и путем, рассчитанным по данным от приемника 15 спутниковой навигации модулем 14 маршрута. Соответствие устанавливается путем выбора коэффициента К. Известное количество N импульсов на оборот колеса (в отсутствие юза и боксования) позволяют блоку 13 вычисления координаты местонахождения локомотива рассчитывать координаты местонахождения локомотива с небольшой погрешностью и продолжать вести поезд по электронной карте маршрута, чтобы проезжать участки, где отсутствует прием сигнала от спутников без переключения на резервный алгоритм. После возобновления нормального приема сигнала приемником 14 спутниковой навигации более чем на 5 секунд погрешность расчетов автоматически устраняется и устройство снова готово к работе при очередном пропадании сигнала. Этим практически устраняется влияние обычных пропаданий сигналов от навигационных спутников при движении по холмистой местности или в тоннелях. Надежность контроля за управлением поезда дополнительно повышается в местах, где надежно работает функция уточнения координаты места нахождения поезда по изменению параметров (синхрогрупп, в случае АЛС-ЕН) кодового сигнала, поступающего на границах рельсовых цепей. Если зарегистрированное модулями 4 и 5 центральной обработки информации место смены параметров кодовых сигналов АЛС-ЕН соответствует расчетной координате границы блок участка по электронной карте маршрута, то эта информация используется устройством для дополнительной коррекции ошибки вычисления текущей координаты местонахождения поезда. Это особенно существенно при прохождении поездом тоннелей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления рельсовым транспортным средством и система для его реализации | 2024 |
|
RU2830326C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2009 |
|
RU2423269C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| Устройство контроля за управлением поезда и бдительностью машиниста | 2019 |
|
RU2718621C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2008 |
|
RU2390453C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2763082C1 |
| Способ контроля состояния рельсовой линии и система интервального регулирования движения поездов на перегоне | 2021 |
|
RU2766015C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ С АВТОБЛОКИРОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491198C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2503564C1 |
Изобретение относится к области железнодорожной автоматики, телемеханики и связи. Устройство контроля за управлением поезда и бдительностью машиниста содержит взаимосвязанные между собой блок контроля безопасности, усилитель, электропневматический клапан, модули центральной обработки информации, межмодульный интерфейс, модули измерения параметров движения и модуль непрерывных каналов внешних устройств, блок приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации. Также в устройстве имеется модуль датчиков пути и скорости, блок вычисления координаты местонахождения локомотива, модуль маршрута, приемник спутниковой навигации, модуль радиоканала и радиомодем. Дополнительно в устройство введен и подключен к межмодульному интерфейсу блок определения относительной координаты местонахождения локомотива внутри очередной рельсовой цепи. Решение направлено на повышение безопасности и скорости движения поездов. 2 ил.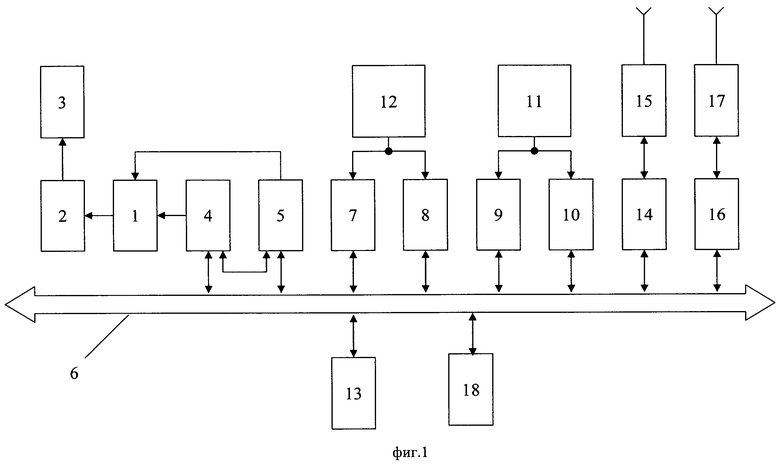
Устройство контроля за управлением поезда и бдительностью машиниста, содержащее блок контроля безопасности, соединенный через усилитель с входом электропневматического клапана, входы блока контроля безопасности соединены с выходами модулей центральной обработки информации, которые первыми портами соединены между собой непосредственно, а вторыми портами подключены к межмодульному интерфейсу, к которому подключены два модуля измерения параметров движения и два модуля непрерывных каналов внешних устройств, входы которых соединены с блоком приемных катушек систем автоматической локомотивной непрерывной сигнализации и автоматической локомотивной единой непрерывной сигнализации, входы модулей измерения параметров движения соединены с модулем датчиков пути и скорости, подключенные к межмодульному интерфейсу блок вычисления координаты местонахождения локомотива, модуль маршрута, соединенный с приемником спутниковой навигации, и модуль радиоканала, соединенный с радиомодемом, отличающееся тем, что в него введен и подключен к межмодульному интерфейсу блок определения относительной координаты местонахождения локомотива внутри очередной рельсовой цепи.
| Дозатор для сиропа | 1951 |
|
SU94943A1 |
| Тони О.В | |||
| и др | |||
| Спутниковые технологии на железных дорогах России // Под | |||
| ред | |||
| В.И | |||
| Якунина | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| и доп | |||
| - М.: ИПЦ «Дизайн | |||
| информация | |||
| Картография» | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Регулятор для ветряного двигателя в ветроэлектрических установках | 1921 |
|
SU136A1 |
| RU 85876 U1, 20.08.2009 | |||
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| СПОСОБ И СИСТЕМА ОБЕСПЕЧЕНИЯ ДВИЖЕНИЯ МОНТАЖНЫХ ПОЕЗДОВ | 2004 |
|
RU2369508C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ И ОПРЕДЕЛЕНИЯ ЕГО ПОЗИЦИИ НА РЕЛЬСОВОМ ПУТИ | 2009 |
|
RU2409492C1 |

