Изобретения относятся к области шагающих движителей, предназначенных для перемещения военной техники и вооружения в условиях бездорожья на грунтовой и заболоченной местности.
1. Известен способ повышения проходимости шагающего движителя тяжелой техники - шагающего экскаватора, заключающийся в поочередной перестановке плоских опорных частей движителя в направлении движения путем поднятия 1/2 площади плоской опорной поверхности движителя над 1/2 площади второй половины плоской опорной поверхности движителя продольного перемещения и спуска ее на новое место преодолеваемого основания, а поворот шагающего движителя на основании производят путем поворота вокруг вертикальной оси поднятой на 1/2 площади движителя вокруг вертикальной оси движителя и спуска на основание в новом направлении [1].
Предлагаемый способ не обеспечивает проходимость слабых грунтовых и торфяных оснований предельно загруженным шагающим движителем с плоской опорной поверхностью. Скорость продвижения шагающего движителя недостаточна для перемещения тяжелого вооружения в условиях боевых действий.
Наиболее близким по технической сущности к предлагаемому является способ повышения проходимости шагающего болотохода, заключающийся в поочередном поднятии, горизонтальном перемещении, при необходимости с поворотом на весу, центральной плоской опорной поверхности движителя, в ее спуске на преодолеваемое слабое основание в заданном направлении, в дальнейшем поднятии, перемещении и спуске отставшей плоской опорной поверхности движителя перед ранее опущенной на основание опорной частью движителя [2].
Недостатком известного способа повышения проходимости шагающих движителей тяжелого вооружения является низкая скорость перемещения по основанию и недостаточная несущая способность преодолеваемых слабых оснований под плоской опорной поверхностью движителя.
Технический результат по предлагаемому способу повышения проходимости движителя военной техники, заключающемуся в поочередном продольном перемещении одной половины опорной поверхности движителя, которую составляют из двух боковых секций понтонов, относительно второй центральной половины опорной поверхности и секции-понтона движителя и наоборот - центральной опорной поверхности относительно двух боковых половин опорной поверхности секций-понтонов, в повороте силовыми цилиндрами шагающего движителя в заданном направлении, достигается тем, что опорную поверхность секций-понтонов шагающего движителя выполняют полусферической в собранном перед относительным продольным перемещением состоянии с радиусом опорной поверхности Rсф=0,5l/sinψ, где l - длина секции-понтона, ψ - угол полуконтакта сферической составленной опорной поверхности секций-понтонов шагающего движителя при ψ=φ, где φ=arcsin[2sinφстр/(1+sin2φстр)]-φстр - угол внутреннего трения преодолеваемого слабого грунтового основания нарушенной структуры, для торфа φ=φТ.стр, φстр - угол внутреннего трения основания ненарушенной структуры, опорную полусферическую поверхность секций-понтонов выполняют с продольными рядами герметичных углублений, в углублениях устанавливают на поперечных осях полые катки, все оси с катками в продольных рядах центральной секции-понтона одновременно тормозят при взаимно противоположном выдвижении боковых секций-понтонов относительно центральной секции-понтона при повороте шагающего движителя, продольное перемещение движителя на слабом основании производят путем поочередного горизонтального поступательного смещения одной половины опорной поверхности секций-понтонов относительно другой при торможении катков опорной поверхности другой половины опорной поверхности секций-понтонов, а полые катки опорной поверхности секций-понтонов снабжают поперечными грунтозацепами.
Полусферическая опорная поверхность секций-понтонов шагающего движителя на 20% увеличивает несущую способность слабого основания с увеличением вдвое его устойчивости под опорной поверхностью за счет равномерного распределения контактных напряжений. Увеличивается скорость перемещения шагающего движителя за счет устранения операций по подъему-спуску секций-понтонов в процессе продольного их перемещения по горизонтальным направляющим, а также за счет ускорения поворота шагающего движителя.
2. Известно устройство шагающего движителя тяжелой техники - шагающего экскаватора, состоящего из корпуса с рамой и центральной опорной плоской платформой и двух плоских боковых лыж, гидропривода с силовыми цилиндрами, механизма шагового перемещения лыж и платформы относительно друг друга, поворотного механизма платформ измерения направления движения движителя [1].
Устройство шагающего движителя тяжелого экскаватора предназначено для его поступательного перемещения и поворота на плотных подготовленных основаниях рудниковых, угольных карьеров. Проходимость обычных грунтовых и слабых оснований под шаговым движителем тяжелого экскаватора не предусматривается.
Наиболее близким по технической сущности к предлагаемому устройству является шагающий болотоход (с краном, грузоподъемностью 3 т) весом 16 т со скоростью перемещения по болоту до 2 км/ч, состоящий из корпуса с грузовой рамой и центральной опорной плоской платформой с приводом от трактора Т-150К и сдвоенных боковых опорных плоских платформ и боковых платформ для изменения направления движения движителя силовыми цилиндрами [2].
Существенным недостатком известных устройств шагового перемещения опорных плоских платформ относительно друг друга является их низкая скорость передвижения, связанная с необходимостью затрат времени на подъем и спуск платформ относительно друг друга при необходимой затрате времени на их поступательное перемещение. Несущая способность осушенных торфяных оснований под плоскими поверхностями максимально нагруженных платформ прямоугольной формы резко падает при потере структурной плотности на растяжение грунта и торфа под краями секций-понтонов движителя болотохода.
Технический результат по предлагаемому устройству движителя военной техники шагающего движителя тяжелого вооружения, состоящему из корпуса с рамой, грузовой платформы на центральной секции-понтоне, боковых опорных секций-понтонов, гидропривода с силовыми цилиндрами относительного продольного перемещения и поворота центральной и боковых секций-понтонов, механизма шагового перемещения боковых и центральной секций-понтонов относительно друг друга, механизма поворота центральной и боковых секций-понтонов в заданном направлении с силовыми цилиндрами для изменения направления движения движителя, достигается тем, что составная опорная поверхность из центральной и боковых секций-понтонов в сборе перед относительным продольным перемещением выполнена полусферической с радиусом Rсф=Dсф/2=0,5l/sinψ, где l - длина секции-понтона в сборе, φ - угол полуконтакта по радиусу Rсф опорной поверхности платформ со слабым грунтовым или торфяным основанием, при этом угол ψ=φ, где угол внутреннего трения грунта основания с нарушенной структурой φ=arcsin[2sinφстр/(1+sin2φстр)]-φстр, для торфа φ=φТ.стр - углы внутреннего трения грунта и торфа ненарушенной структуры, центральная и боковые секции-понтоны связаны между собой продольными направляющими и силовыми цилиндрами их относительного продольного перемещения в горизонтальных направляющих, герметичная опорная полусферическая поверхность центральной и боковых секций-понтонов выполнена с продольными рядами углублений и с установленными в них на осях полыми катками, катки выполнены выступающими ниже опорной полусферической поверхности секций-понтонов с механизмом одновременного торможения в продольных рядах вдоль каждой из трех секций-понтонов, при этом площадь опорной полусферической поверхности центральной секции-понтона выполнена соизмеримой по площади с опорной полуцилиндрической поверхностью обеих боковых секций-понтонов, грузовая рама центральной секции-понтона выполнена по всей ширине движителя и оснащена снизу свободно вращающимися роликами, упирающимися в крыши боковых секций-понтонов, а опорные полые катки секций-понтонов под их днищем выполнены с грунтозацепами.
В предлагаемом устройстве шагового движителя увеличена скорость поступательного перемещения его грузовой платформы и разворота движителя в движении и на месте. Полусферическая поверхность плавающих секций-понтонов грузовой платформы увеличивает несущую способность и устойчивость преодолеваемых слабых грунтовых и торфяных оснований.
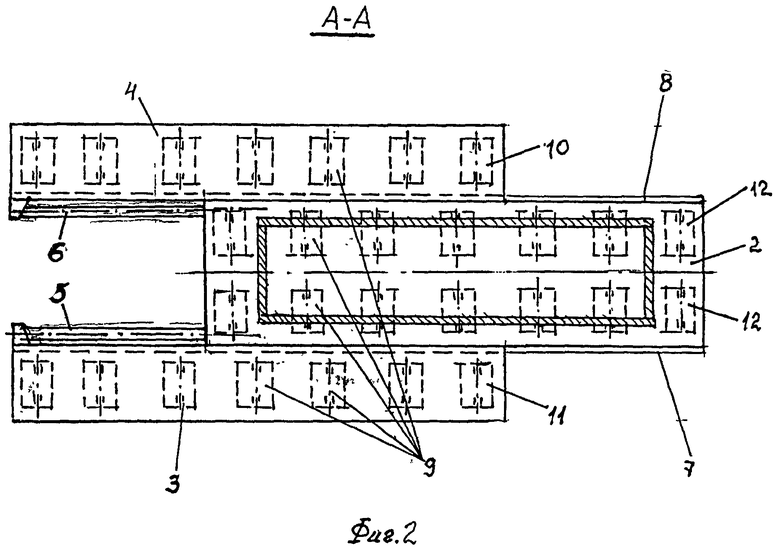
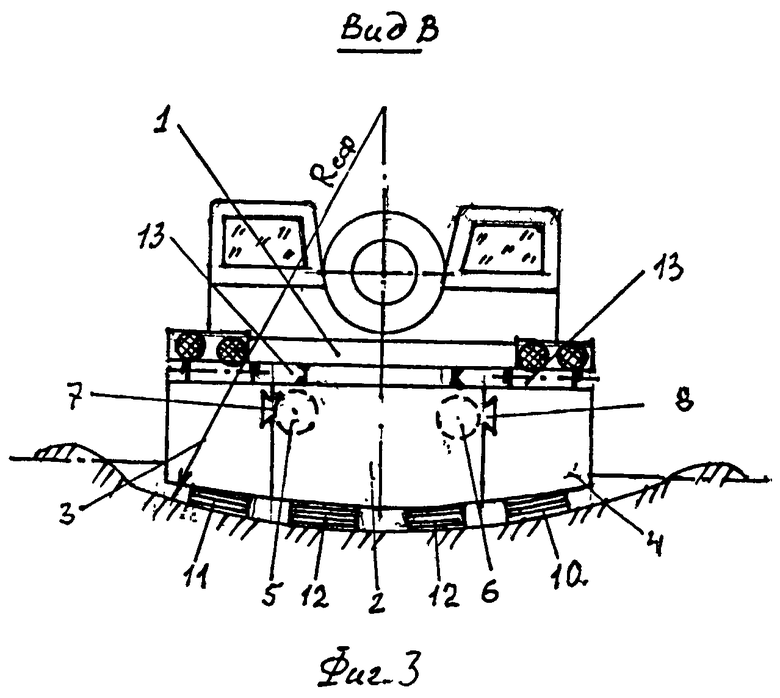
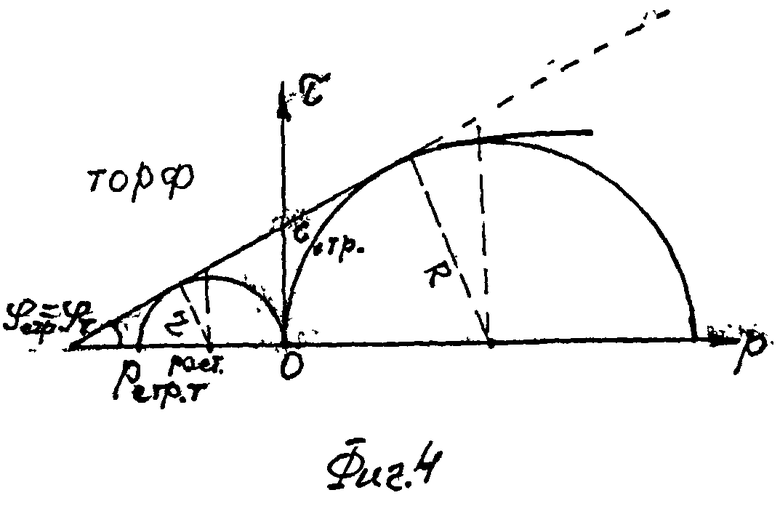
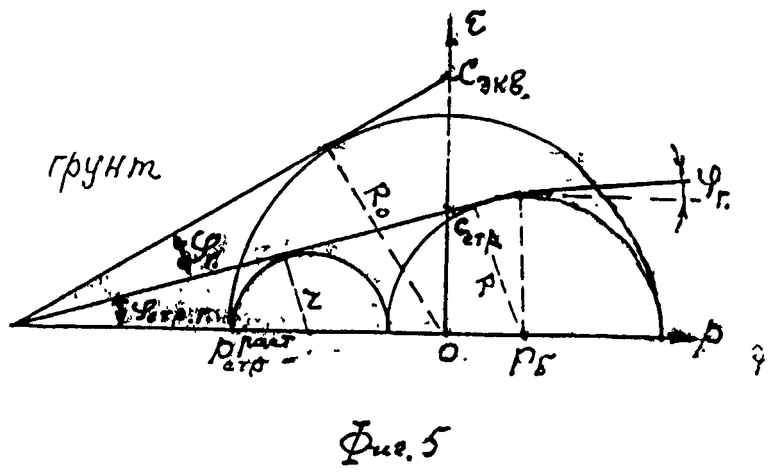
Устройство шагового движителя повышенной проходимости поясняется графическими материалами, где на фиг.1 представлен общий вид шагающего движителя тяжелого ракетного вооружения в процессе продольного перемещения, на фиг.2 - поперечный разрез А-А фиг.1; на фиг.3 - вид В опорной полусферической поверхности шагающего движителя; на фиг.4, 5 - графики предельного состояния торфа и грунта.
Шагающий движитель ракетного вооружения (фиг.1) состоит из корпуса с рамой 1 грузовой платформы на центральной секции-понтоне 2, боковых опорных секций-понтонов 3 и 4 (фиг.2), гидропривода с силовыми цилиндрами 5, 6 относительного продольного перемещения и поворота центральной 2 и боковых 3, 4 секций-понтонов, механизма шагового перемещения боковых 3, 4 и центральной 2 секций-понтонов относительно друг друга в горизонтальном продольном направлении с помощью силовых цилиндров 5, 6 на продольных направляющих 7, 8 (фиг.2, 3), связывающих центральную 2 и боковые 3, 4 секции-понтоны с возможностью относительного продольного перемещения при соответствующем торможении опорных полых катков 9 от вращения в продольных рядах 10, 11 и 12 боковых 3, 4 или центральной 2 секций-понтонов, механизма поворота на основании шагающего движителя в заданном направлении с помощью привода гидросистемы независимого перемещения штоков силовых цилиндров 5, 6 во взаимно противоположных направлениях с соответствующим взаимно противоположным перемещением боковых секций-понтонов 3, 4 с опорными катками 9 в расторможенных и заторможенных рядах 12 полых опорных катков центральной секции-понтона 2 (фиг.3). Катки 9 секций-понтонов 2, 3, 4 выполнены с грунтозацепами и установлены на поперечных осях вращения в выемках на дне герметичных секций-понтонов с возможностью независимого торможения от вращения в отдельных рядах 10, 11 и 12. Опорная поверхность секций-понтонов 2, 3, 4 в сборе выполнена полуцилиндрической с радиусом Rсф=Dсф/2=0,5l/sinψ, где l - длина секции-понтона 2, 3, 4; ψ - угол полуконтакта сферической опорной поверхности секций-понтонов 2, 3, 4 в сборе с преодолеваемым основанием с углом φ внутреннего трения, причем ∠ψ=∠φ. Грузовая рама 1 платформы центральной секции-понтона 2 снизу выполнена по всей ширине движителя с вращающимися снизу роликами 13, упирающимися в крышу боковых секций-понтонов 3, 4.
Шагающий движитель преодолевает слабые грунтовые и торфяные основания путем поступательного перемещения с помощью механизма шагового перемещения штоков обоих силовых цилиндров 5, 6 боковых секций-понтонов 3, 4 на продольных направляющих 7, 8 и роликах 13 при расторможенных на полусферической опорной поверхности опорных катков 9 и торможении рядов 12 опорных катков 9 неподвижной центральной секции-понтона 2. Далее ряды 12 опорных катков 9 растормаживают, а ряды 10, 11 опорных катков 9 тормозят от продольного перемещения, центральную секцию-понтон 2 поступательно перемещают относительно стоящих на месте боковых секций-понтонов 3, 4. При повороте движителя на месте или на ходу ряды 12 опорных катков 9 центральной секции притормаживают путем ограничения вращения или торможения от вращения опорных катков 9, а боковые секции-понтоны 3, 4 выдвигают силовыми цилиндрами 5, 6 во взаимно противоположном направлении с поворотом всего движителя в нужную сторону.
Пример. Шагающий движитель с грузовой платформой выполнен с секциями-понтонами: центральная длиной l=600 см, шириной 200 см, площадью F=120000 см2, и двух боковых секций-понтонов длиной l=500 см и шириной каждая 100 см, площадью F3,4=60000 см2, в сборе составляющие в плане опорную поверхность F=l·в=600·400=240000 см2 с периметром П=2(l+в)=2(600+400)=2000 см, выполненную на торфяном основании (φТ=14°=φстр, c=cстр=0,01 МПа, E=0,6 МПа, µ=0,3) выпуклой полусферической формой, с углом полуконтакта ψ=φT=14°, общей площадью 
Допускаемое давление на торфяную залежь
[p]В=(2/3)pВ=(2/3)(0,04+0,9·Псф/Fсф)=(2/3)(0,04+0,9·2020/406072)=0,0297 МПа.
Тогда вес шагающего движителя с ракетным вооружением может составлять величину
P=[p]В·Fсф=0,297·406072=120,41 т.
Предлагаемые способы повышения проходимости движителей на слабых грунтовых и торфяных основаниях базируются на научных положениях «Физики контактного взаимодействия материальных сред», указывающих на то, что поверхностные слои Земной коры находятся на глубину h=c/γ в предельном состоянии растяжения: торф - фиг.4 и грунт - фиг.5 в ненарушенном структурном состоянии (

Источники информации
1. Политехнический словарь. / Под ред. акад. И.И. Артоболевского. - М.: Изд-во «Советская энциклопедия», 1977. - С.559.
2. Петров А.А., Коровицын Л.Ф. и др. «Шагающий болотный кран». / Информационный листок. - Тверь, Тв. ЦНТИ: рекламный выпуск №91-20-Р, зак. №406.16.10.91. - 4 с.
Группа изобретений относится к способу повышения проходимости движителя военной техники и шагающему движителю. Способ заключается в том, что опорная поверхность секций-понтонов шагающего движителя выполнена полусферической. Опорную полусферическую поверхность секций-понтонов выполняют с продольными рядами герметичных углублений. В углублениях устанавливают на поперечных осях полые катки. Оси с катками в продольных рядах одной из боковых секций-понтонов одновременно тормозят при повороте шагающего движителя в заданном направлении. Продольное перемещение движителя на слабом основании производят путем поочередного горизонтального поступательного смещения одной половины опорной поверхности секций-понтонов относительно другой при торможении катков опорной поверхности другой половины опорной поверхности секций-понтонов. В устройстве полые катки опорной поверхности всех секций-понтонов снабжают поперечными грунтозацепами. Центральная и боковые секции-понтоны связаны между собой продольными направляющими и силовыми цилиндрами их относительного продольного перемещения в направляющих. Катки выполнены выступающими ниже опорной полусферической поверхности секций-понтонов с механизмом одновременного торможения в продольных рядах вдоль каждой из трех секций-понтонов. Повышается проходимость слабых грунтов и торфяных болот под движителями тяжелых ракетных установок шагающего типа. 2 н.п. ф-лы, 5 ил.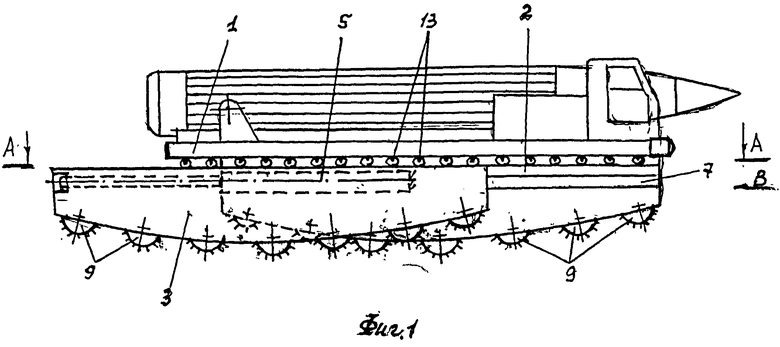
1. Способ повышения проходимости движителя военной техники, заключающийся в том, что поочередно в продольном направлении перемещают одну половину опорной поверхности движителя, которую составляют из двух боковых секций-понтонов, относительно второй центральной половины опорной поверхности секции-понтона движителя и наоборот - центральную опорную поверхность относительно двух боковых половин опорной поверхности секций-понтонов, шагающий движитель поворачивают силовыми цилиндрами для движения в заданном направлении, отличающийся тем, что опорную поверхность секций-понтонов шагающего движителя выполняют полусферической в собранном перед относительным продольным перемещением состоянии с радиусом опорной поверхности
Rсф=l/sinψ,
где l - длина секций-понтонов;
ψ - угол полуконтакта сферической составной опорной поверхности секций-понтонов шагающего движителя при ψ=φ;
где 
φ - угол внутреннего трения преодолеваемого слабого грунтового или торфяного основания нарушенной структуры с удельным сцеплением
 ,
,
φстр - угол внутреннего трения грунтового основания с удельным сцеплением  ненарушенной структуры, для торфа φ=φстр.Т, при допустимом давлении на грунт:
ненарушенной структуры, для торфа φ=φстр.Т, при допустимом давлении на грунт:
 ,
,
на торф:
 ,
,
опорную полусферическую поверхность секций-понтонов выполняют с продольными рядами герметичных углублений, в углублениях устанавливают на поперечных осях полые катки, все оси с катками в продольных рядах одной из боковых секций-понтонов одновременно тормозят при повороте шагающего движителя в заданном направлении, продольное перемещение движителя на слабом основании производят путем поочередного горизонтального поступательного смещения одной половины опорной поверхности секций-понтонов относительно другой при торможении катков опорной поверхности другой половины опорной поверхности секций-понтонов, а полые катки опорной поверхности всех секций-понтонов снабжают поперечными грунтозацепами.
2. Устройство движителя военной техники - шагающего движителя тяжелого вооружения, состоящее из корпуса с рамой грузовой платформы на центральной секции-понтоне, боковых опорных секций-понтонов, гидропривода с силовыми цилиндрами относительного продольного перемещения и поворота центральной и боковых секций-понтонов, механизма шагового перемещения боковых и центральной секций-понтонов относительно друг друга, механизма поворота центральной и боковых секций-понтонов в заданном направлении с силовыми цилиндрами для изменения направления движения движителя, отличающееся тем, что составная опорная поверхность из центральной и боковых секций-понтонов в сборе перед относительным продольным перемещением выполняется полусферической с радиусом
Rсф=Dсф/2=0,5l/sinψ,
где l - длина секции-понтона в сборе,
ψ - угол полуконтакта по радиусу Rсф опорной поверхности платформ со слабым грунтовым или торфяным основанием, при допустимом давлении:
 - на грунт,
- на грунт,
 - на торф,
- на торф,
угол ψ=φ, где угол внутреннего трения грунта основания с нарушенной структурой

и удельным сцеплением
 ,
,
для торфа φ=φстр.T,
где φстр и φстр.Т - углы внутреннего трения грунта и торфа ненарушенной структуры;
центральная и боковые секции-понтоны связаны между собой продольными направляющими и силовыми цилиндрами их относительного продольного перемещения в направляющих, герметичная опорная полусферическая поверхность центральной и боковых секций-понтонов выполнена с продольными рядами углублений и с установленными в них на осях полыми катками, катки выполнены выступающими ниже опорной полусферической поверхности секций-понтонов с механизмом одновременного торможения в продольных рядах вдоль каждой из трех секций-понтонов, при этом площадь опорной полусферической поверхности центральной секции-понтона выполнена соизмеримой по площади с опорной полусферической поверхностью обеих боковых секций-понтонов, грузовая рама центральной секции-понтона выполнена по всей ширине движителя и оснащена снизу свободновращающимися роликами, упирающимися в крыши понтонов боковых секций-понтонов, а опорные ролики секций-понтонов под их днищем выполнены с грунтозацепами.
| Способ непрерывного удаления воздуха из вискозы | 1984 |
|
SU1194916A1 |
| Шагающий движитель транспортных средств | 1989 |
|
SU1678692A1 |
| Механизм подачи сверлильного станка | 1958 |
|
SU123389A1 |
| УСТРОЙСТВО для ФОКУСИРОВКИ УСТАНОВЛЕИНЫХ ВЕРТИКАЛЬНО ПЕРЕДАЮЩИХ КАМЕР | 0 |
|
SU325593A1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОХОДИМОСТИ ГРУНТОВОГО И ТОРФЯНОГО ОСНОВАНИЯ ПОД ГУСЕНИЧНЫМ ДВИЖИТЕЛЕМ И УСТРОЙСТВО ГУСЕНИЧНОГО ДВИЖИТЕЛЯ | 2008 |
|
RU2376189C1 |

