Изобретение относится к ракетной технике и может быть использовано при отработке старта ракет, преимущественно с двигателями на жидком топливе. Старт может осуществляться как из наземных пусковых установок, так и установок, находящихся в подводном положении.
Известны экспериментальные ракеты, служащие для отработки старта (патенты США №№3075301, 3075302, 3120709).
В этих экспериментальных ракетах для предупреждения падения макета на пусковую установку применяется разбалансировка, которая начинается либо после выхода макета из шахты пусковой установки, либо после выхода макета из воды.
Известная экспериментальная ракета (см. Э. Бургесс "Баллистические ракеты дальнего действия", перев. с англ., М. Воениздат, 1963, с.61-62) имеет весогабаритный макет ракеты, двигательную установку стартовой ступени с ограниченным запасом топлива, органы управления и систему управления. В течение пяти секунд активного полета эта ракета совершила полет по запрограммированной траектории до высоты 600 м и упала в море на расстоянии 800 м от места старта.
Приведенная экспериментальная ракета с системой управления для отработки старта была выбрана в качестве прототипа.
Известно, что испытания на участке старта проводятся с целью отработки выбранного способа старта ракеты и проверки правильности принятых технических решений по конструкции ракеты и пусковой установки с точки зрения динамики старта, в частности, по характеристикам энергетических средств старта, его запуску, обеспечения безударного выхода ракеты из пусковой установки, формированию команд на запуск и отключение двигателя первой ступени, обеспечению увода экспериментальной ракеты (макета) от стартовой позиции с последующим приземлением (приводнением) в заданной зоне.
Из сказанного видно, что использование экспериментальных ракет со штатной системой управления для отработки старта, как с технической, так и особенно с экономической точки зрения является нецелесообразным.
Во-первых, число задач, решаемых системой управления на участке старта, является незначительным и они относительно несложные по сравнению с полным объемом задач, возлагаемых на систему управления на последующих участках полета и, во-вторых, ее использование значительно увеличивает стоимость этого этапа испытаний.
Задачей настоящего изобретения является разработка бортового командного устройства, устанавливаемого на экспериментальной ракете (макете), которое без использования системы управления позволяет формировать команды на задействование всех систем, необходимых для обеспечения старта макета, и тем самым решать поставленные технические задачи на этом участке движения.
Указанная задача решается тем, что для отработки катапультирующего способа старта на известный весогабаритный макет ракеты, имеющего, как на ракете, катапультирующее устройство (например, пороховой аккумулятор давления), двигатель первой ступени и рулевые машины органов управления двигателя, устанавливается вместо системы управления бортовое командное устройство, содержащее источник питания, электрически связанного с энергетическими средствами старта и рулевыми машинами.
В предлагаемом устройстве источник питания электрически связан с катапультирующим устройством, двигателем первой ступени и рулевыми машинами через установленные переключатели с нормально разомкнутыми контактами, на выходной электрической цепи источника питания использован переключатель, взаимодействующий с датчиком выхода макета, размещенного в районе верхнего торца пускового контейнера, в электрической цепи связи с двигателем установлен блок временной задержки его запуска относительно момента срабатывания датчика выхода, для подачи на рулевые машины электрического сигнала нужной полярности введены две параллельные цепи, в одной из которых подключен инвертор сигнала, а на штоках рулевых машин монтированы срезные штифты (фиксаторы), первоначально удерживающие рулевые органы в нулевом положении, и механические ограничители их перемещения при дальнейшем движении макета.
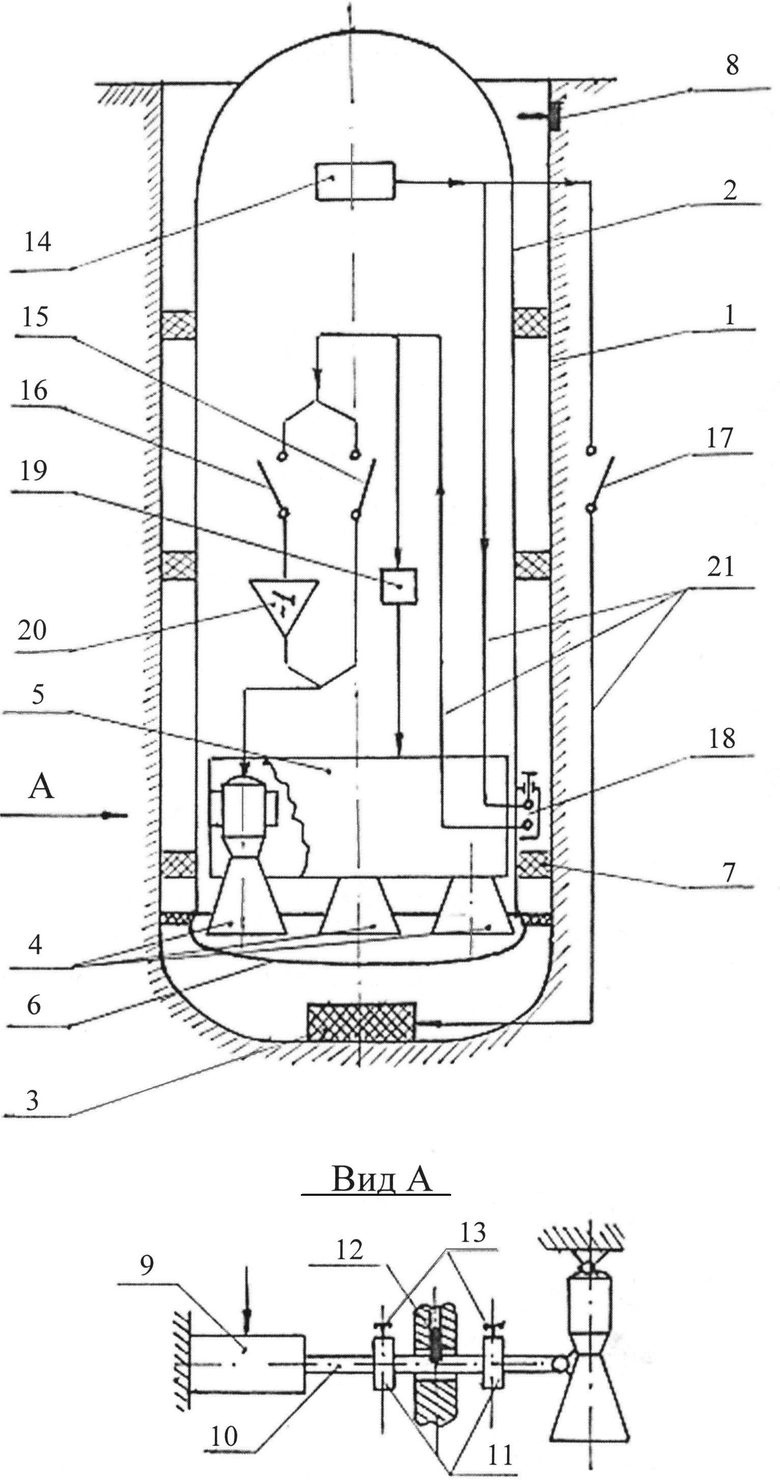
На чертеже схематически изображено бортовое командное устройство и его функциональные связи с энергетическими средствами старта, где:
1 - пусковой контейнер;
2 - макет ракеты;
3 - катапультирующее устройство;
4 - органы управления;
5 - двигатель первой ступени;
6 - поддон с обтюрирующим поясом;
7 - опорно-ведущие пояса макета;
8 - датчик выхода;
9 - рулевая машина;
10 - шток рулевой машины;
11 - механические ограничители;
12 - срезной штифт;
13 - зажимные винты;
14 - электрический источник питания;
15, 16, 17, 18 - переключатели с нормально разомкнутыми контактами;
19 - блок временной задержки запуска двигателя;
20 - инвертор;
21 - электрическая связь.
Наличие поддона накладывает жесткие ограничения на возможность отклонения органов управления с точки зрения обеспечения безударного его отделения от макета. Поэтому в конструкциях поддона с плотной компоновкой органы управления до его отделения фиксируются в нулевом положении.
Предложенное устройство работает следующим образом.
До пуска макета 2 определяют по величине заданной (отведенной) зоне падения и известному направлению увода величину и знак отклонения органов управления 4 двигателя 5, а также время работы двигателя, которые используются для практической реализации увода макета в заданную зону падения.
Затем фиксируют органы управления в нулевом положении путем установки на штоках 10 рулевых машин 9 срезных штифтов 12 и одновременно неподвижно крепят с помощью зажимных винтов 13 механические упоры 11, ограничивающие отклонения органов управления полученными величинами углов.
Баки макета заправляют необходимым количеством топлива в соответствии с выбранным временем работы двигателя.
В зависимости от знака отклонения органов управления замыкаются контакты переключателей 15 или 16.
В блоке временной задержки запуска двигателя 19 устанавливается величина этой задержки относительно момента срабатывания датчика выхода 8, которая определяется из условия обеспечения отделения поддона до появления расхода двигателя и исключения последующего воздействия струй двигателя на пусковую установку в процессе его выхода на режим полной тяги.
Далее производится пуск макета. Для этого замыкаются контакты переключателя 17 и электрический сигнал от источника питания 14 поступает на катапультирующее устройство (например, пороховой аккумулятор давления) 3, запуская его, осуществляют выход макета из контейнера 1 с заданным диапазоном скоростей.
Датчик выхода 8 имеет выступающую подвижную (подпружиненную) часть, которая при столкновении с опорно-ведущими поясами макета 7 уходит в нишу контейнера 1, а после их прохождения датчик занимает исходное положение. В случае соприкосновения датчика с переключателем 18 замыкаются его контакты (срабатывание датчика выхода) и электрический командный ток от источника питания поступает на вход устройства временной задержки запуска двигателя 19 и на рулевые машины 9 по цепям с замкнутыми переключателями 15 или 16.
До появления продуктов сгорания двигателя от макета отделяется поддон 6.
С момента выхода рулевых машин на рабочий режим под действием управляющего электрического сигнала происходит расфиксация органов управления путем разрушения срезных штифтов 12 ходом штоков 10 рулевых машин 9, затем органы управления отклоняются до установленных механических упоров 11 с последующим их удержанием на упорах за счет усилий, развиваемых рулевыми машинами.
С помощью отклоненных до механических упоров органов управления макет разворачивается в сторону увода. В известный момент времени прекращают работу двигателя и после движения на участке спуска макет достигнет заданной зоны падения.
Использование предложенного устройства позволяет без использования системы управления обеспечить отработку способа старта и надежный увод макета от стартовой позиции.
Так, например, для баллистической ракеты с двигателем первой ступени, имеющим несколько подвижных камер с осями качания в плоскостях стабилизации ракеты, с помощью отклонения двух камер в плоскости тангажа до механических упоров, установленных на угол 1,3 град и при времени работы двигателя 7 сек обеспечивается приземление макета ракеты в заданном районе, на расстоянии 1210 м от точки старта. При этом используется временная задержка запуска двигателя, равная 0,3 сек от момента срабатывания датчика выхода макета из пускового контейнера.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТРАБОТКИ СТАРТА РАКЕТЫ | 2013 |
|
RU2536298C2 |
| СПОСОБ ОТРАБОТКИ СТАРТА РАКЕТЫ | 2013 |
|
RU2534153C2 |
| СПОСОБ СТАРТА РАКЕТЫ С САМОЛЕТА ДЛЯ ВЫВЕДЕНИЯ ПОЛЕЗНОГО ГРУЗА НА ОРБИТУ | 2008 |
|
RU2394201C2 |
| МНОГОЦЕЛЕВАЯ УПРАВЛЯЕМАЯ РАКЕТА В ПУСКОВОМ КОНТЕЙНЕРЕ | 2004 |
|
RU2277693C1 |
| СПОСОБ УПРАВЛЕНИЯ ПО ЛУЧУ ВРАЩАЮЩЕЙСЯ ПО КРЕНУ РАКЕТОЙ И УПРАВЛЯЕМАЯ ПО ЛУЧУ ВРАЩАЮЩАЯСЯ ПО КРЕНУ РАКЕТА | 2011 |
|
RU2460966C1 |
| КРЫЛАТАЯ РАКЕТА В ТРАНСПОРТНО-ПУСКОВОМ КОНТЕЙНЕРЕ | 2001 |
|
RU2215981C2 |
| СПОСОБ СТАРТА УПРАВЛЯЕМОЙ РАКЕТЫ ИЗ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2240489C1 |
| СПОСОБ ВЫПОЛНЕНИЯ СТАРТА РАКЕТЫ С САМОЛЕТА | 1992 |
|
RU2068169C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ РАКЕТНЫМ КОМПЛЕКСОМ | 1996 |
|
RU2108540C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
Изобретение относится к военной технике и может быть использовано для отработки старта ракеты из контейнера. Бортовое командное устройство содержит источник питания, электрически связанный с катапультирующим устройством, двигателем первой ступени, рулевыми машинами через переключатели с нормально разомкнутыми контактами, переключатель, взаимодействующий с датчиком выхода макета, блок временной задержки запуска двигателя относительно момента срабатывания датчика выхода, две параллельные цепи с инвертором для подачи на рулевые машины электрического сигнала нужной полярности. Изобретение позволяет исключить использование системы управления для обеспечения старта и увода макеты от стартовой позиции. 2 ил.
Бортовое командное устройство для отработки способа старта ракеты из пускового контейнера, с помощью пусков весогабаритного макета ракеты, имеющего, как на ракете, катапультирующее устройство (например, пороховой аккумулятор давления), двигатель первой ступени и рулевые машины органов управления, содержащие источник питания, электрически связанный с энергетическими средствами старта и рулевыми машинами, отличающееся тем, что в нем источник питания электрически связан с катапультирующим устройством, двигателем первой ступени и рулевыми машинами через установленные переключатели с нормально разомкнутыми контактами, на выходной электрической цепи источника питания использован переключатель, взаимодействующий с датчиком выхода макета, размещенным в районе верхнего торца пускового контейнера, в электрической цепи связи с двигателем установлен блок временной задержки его запуска относительно момента срабатывания датчика выхода, при подачи на рулевые машины электрического сигнала нужной полярности введены две параллельные цепи, в одной из которых подключен инвертор сигнала, а на штоках рулевых машин монтированы срезные штифты, первоначально удерживающие органы управления в нулевом положении, и механические ограничители их перемещения при дальнейшем движении макета.
| Способ преобразования одноканальной фонограммы в стереофоническую | 1958 |
|
SU124661A2 |
| Амортизатор | 1959 |
|
SU124247A2 |
| US 20080035786 А1, 14.02.2008 | |||
| US 20120097801 A1, 26.04.2012 | |||

