Изобретение относится к авиационной технике и может быть использовано авиационной промышленностью в строительстве летательных аппаратов нового варианта конструкции - аэропланов с воздушным винтом махающего типа, обладающего новыми качествами взлета, полета и посадки на малой взлетной полосе.
Наиболее близким известным техническим решением к изобретению являются малогабаритные летательные аппараты с воздушным винтом, расположенным в носовой части фюзеляжа, содержащие фюзеляж с кабиной, опорные колеса, крылья, жестко скрепленные с фюзеляжем, элероны на крыльях, служащие рулями разворота, киль и стабилизатор с рулями подъема и поворота, закрепленные в хвостовой части фюзеляжа / Прототипы: Самолеты, майские жуки и Патент США №2021627-1935/. Недостатком ныне известных летательных аппаратов-аэропланов является то, что требуется большая полоса пробега при взлете и посадке при больших затратах силовой энергии.
Целью настоящего изобретения является создание летательного аппарата с воздушным винтом нового варианта конструкции, способного осуществлять взлет, полет и посадку с малым пробегом и малыми затратами силовой энергии, как майский жук, стрекозы, птицы.
Эта цель достигается за счет усовершенствования формы конструкции воздушного винта и места его расположения на фюзеляже, как у майских жуков и стрекоз крылья.
Летательный аппарат - аэроплан с воздушным винтом, расположенным в носовой части фюзеляжа, содержащий фюзеляж с кабиной, опорные колеса, крылья, жестко скрепленные с фюзеляжем, элероны на крыльях, служащие рулями разворота, киль и стабилизатор с рулями поворота и подъема, расположенные в хвостовой части фюзеляжа, отличающий тем, что на летательном аппарате применен воздушный винт с махающими лопастями, расположенный по бокам фюзеляжа под крыльями, приводимый кривошипно-шатунным механизмом с двумя кривошипными валами, содержащий основной кривошипный вал и вспомогательный кривошипный вал синхронизации с кривошипами на концах, установленными под углом 30° относительно оси кривошипного вала, который может быть меньше, равным или больше до 180°, выходящими кривошипами наружу по бокам фюзеляжа под крыльями, лопасти винта, закрепленные подвижно широкими концами на кривошипах основного кривошипного вала, рычаги поворота лопастей, шарнирно прикрепленных одними концами к широким концам лопастей винта, шатуны, шарнирно связанные одними концами с рычагами поворота лопастей, а другими концами - с кривошипами вспомогательного кривошипного вала синхронизации, и привод взаимосвязи кривошипных валов, при этом кривошипные валы в фюзеляже расположены параллельно между собой и поперечной оси фюзеляжа с передаточным числом вращения /Н=1:1/ один к одному в одном направлении, при этом кривошипы основного и вспомогательного кривошипных валов расположены между собой не параллельно, а развернуты кривошипными осями на угол 30° в стороны, который может быть меньше, равным или больше до 180°, в целях получения плавного, стабильного, дифференцированного, синхронного, вращательно-колебательного движения лопастей воздушного винта с различными углами атаки при движении кривошипов валов по конусообразной кольцевой траектории, кроме этого на примененном воздушном винте с махающими лопастями кривошипно-шатунного механизма с двумя вращающими кривошипными валами, предусмотрена постановка кривошипно-шатунного механизма с одним основным подвижным кривошипным валом, а второй вспомогательный кривошипный вал синхронизации делается неподвижным, жестко скрепленным с фюзеляжем с выступающими концами наружу с боков фюзеляжа, а поэтому в качестве альтернативы вместо второго неподвижного кривошипного вала синхронизации ставятся стойки по бокам фюзеляжа, жестко прикрепленные к фюзеляжу одними концами, а вторыми концами стойки шарнирно кинематически связаны через шатуны с рычагами поворота лопастей воздушного винта установленными жестко на широких концах лопастей винта снизу перпендикулярно к плоскости винта.
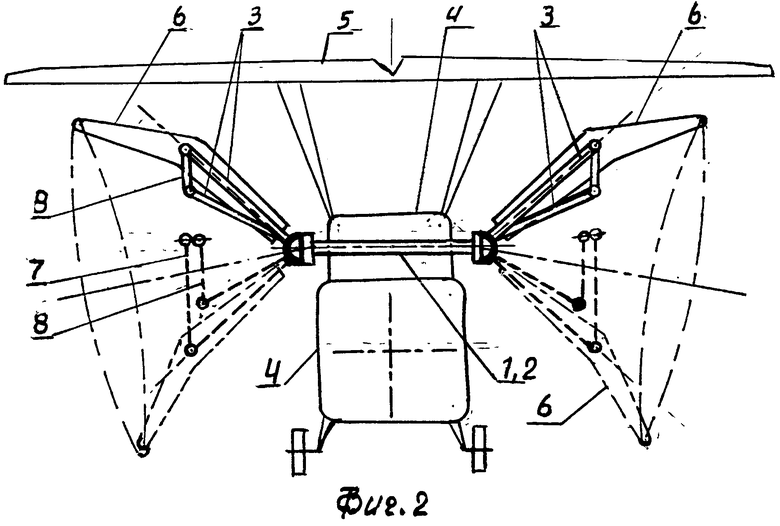
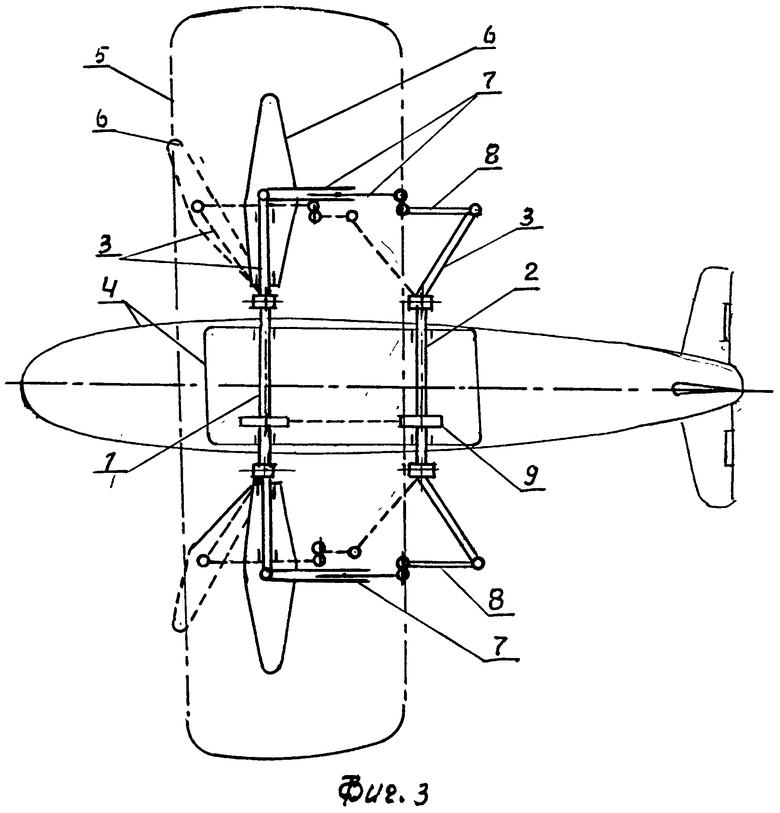
На фигурах рисунков №1, №2, №3 показано на 3-х проекциях конструкция летательного аппарата с воздушным винтом махающего типа, расположенным под крыльями, с подвижными рычагами поворота лопастей винта при вращении.
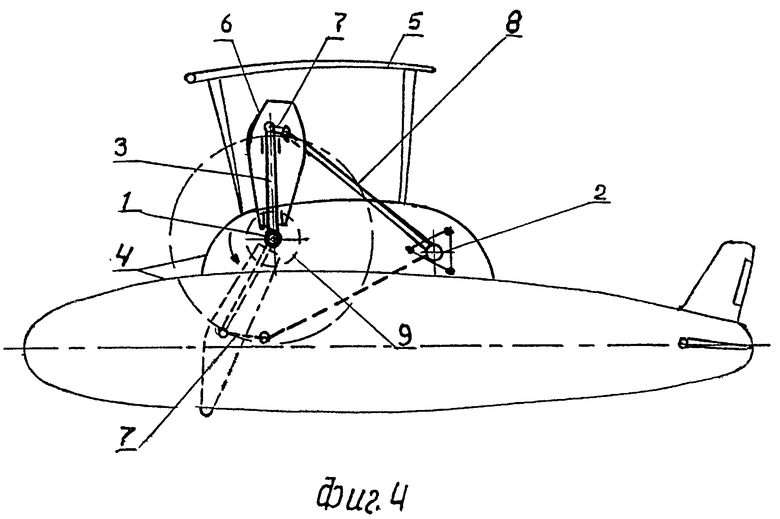
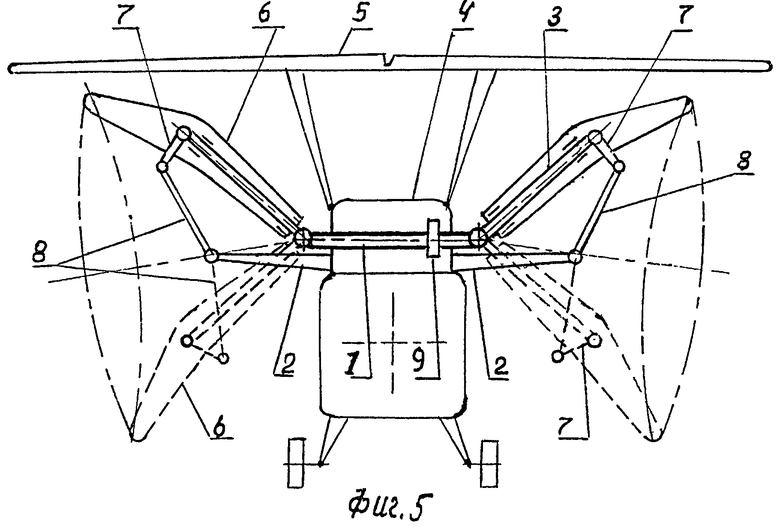
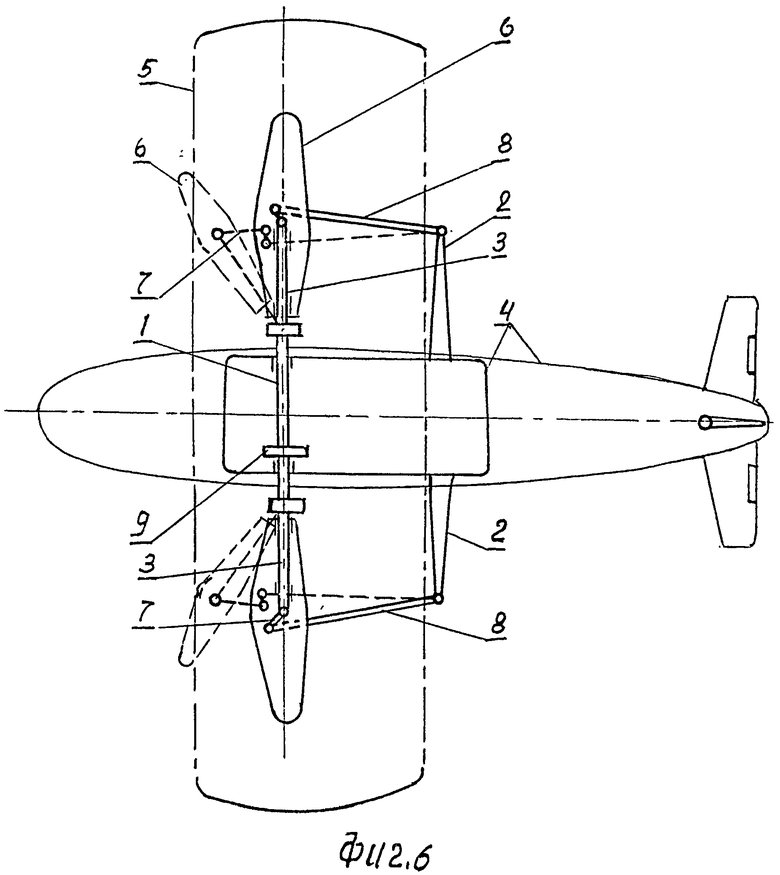
На фигурах рисунков №4, №5, №6 показано в 3-х проекциях конструкция летательного аппарата с жестким креплением снизу рычагов поворота лопастей воздушного винта
УСТРОЙСТВО: Основой новизны конструкции для летательного аппарата-аэроплана является применение на летательном аппарате воздушного винта махающего типа с махающим лопастями 6, расположенными с боков фюзеляжа 4 под крыльями 5, приводимого в движение крившипно-шатунным механизмом с двумя кривошипными валами 1 и 2; этого основного рабочего кривошипного вала 1 и вспомогательного кривошипного вала 2 синхронизации, которые оба с кривошипами 3, расположенными по концам валов 1 и 2, выполненными под углом 30°, который может быть меньше, равным или больше до 180°, относительно оси кривошипных валов 1 и 2 выходящими наружу с боков фюзеляжа 4 под крыльями 5. В фюзеляже 4 валы 1 и 2 расположены между собой параллельно и относительно поперечной оси фюзеляжа с передаточным числом вращения привода 9 /Н=1:1/ один к одному в одном направлении, при этом на кривошипах 3 основного кривошипного вала 1 широкими концами крепятся шарнирно лопасти 6 воздушного винта с закрепленными на них подвижно рычагами 7 поворота, а вспомогательный кривошипный вал 2 синхронизации концами кривошипов 3 шарнирно через шатуны 8 крепится с рычагами 7 поворота лопастей 6, при этом вспомогательный кривошипный вал 2 синхронизации кривошипом 3 ставится не параллельно осью относительно оси кривошипа 3 кривошипного вала 1, а под углом 30° развернут, и может быть меньше, равный или больше до 180° в целях получения нужного угла атаки и плавного стабильно-дифференцированного, синхронного вращательно-колебательного движения лопастей 6 воздушного винта при движении кривошипов 3 валов 1 и 2 по конусообразной кольцевой траектории. Кроме этого, как это показано на фиг. №4, №5 и №6, в тех же целях получения плавного стабильно-колебательного движения лопастей воздушного винта 6 по конусообразной кольцевой траектории кривошипами предусмотрено применение стоек 2 вместо вспомогательного вспомогательного кривошипного вала 2 синхронизации, расположенным по бокам фюзеляжа 4, кинематически связанных через шатуны 8 с рычагами 7 поворота лопастей воздушного винта 6.установленных жестко на широких концах лопастей 6 винта снизу перпендикулярно плоскости.
РАБОТА. Новый вариант конструкции воздушного винта с махающими лопастями, расположенными по бокам фюзеляжа под крыльями, служит для создания наиболее плотного воздушного потока под фюзеляжем и крыльями, притом регулируемого вниз, назад, влево, вправо, придавая хорошую парусность летательному аппарату при малых затратах физической энергии, в результате чего летательный аппарат может легко парировать над землей на малых скоростях полета, а также и осуществлять плавную посадку или взлет с малым пробегом.
И все это может осуществляться за счет того, что угол нагнетания воздушного потока под фюзеляжем и крыльями может меняться, вот для этой цели лопасти воздушного винта делаются не прямые, а согнутыми на угол от 0° до 180° вниз и подвижными на кривошипах осей основного кривошипного вала 1. При нахождении лопастей внизу под крыльями в нижнем положении под фюзеляжем создается самый плотный воздушный поток, а при нахождении лопастей в верхнем положении создается самая наибольшая парусность фюзеляжу, обеспечивающая легкое парирование летательного аппарата. Таким образом работа воздушного винта аналогична работе рыбака веслами на реке. Такое движение лопастей воздушного винта с махающими лопастями копирует на 100% движение и положение крыльев в полете парнокрылых тяжелых насекомых с панцирными крыльями несущими и пленочными крыльями-движетелями, толкающими воздушный поток, поэтому для примера взяты тяжелые навозные майские жуки весом до 4-5 граммов. Сделана модель опытного образца “Жукоплана” одной стороны, на которой проводились испытания, а поэтому считаю, что любителям Махолетизма мое изобретение понравится.
Источники информации
1. Журналы: “Моделист-Конструктор”.
2. Живая природа: Майские жуки: Стрекозы, Птицы и Патент США №2021627 - 1935 г.
Изобретение относится к авиационной технике. Летательный аппарат - аэроплан с воздушным винтом, расположенным в носовой части фюзеляжа, содержит фюзеляж с кабиной, опорные колеса, крылья с элеронами, киль и стабилизатор. Воздушный винт с махающими лопастями расположен по бокам фюзеляжа под крыльями с возможностью привода кривошипно-шатунным механизмом с основным и вспомогательным кривошипными валами. Лопасти винта закреплены подвижно широкими концами на кривошипах основного кривошипного вала. Кривошипные валы в фюзеляже расположены параллельно между собой и поперечной оси фюзеляжа. Предусмотрена постановка кривошипно-шатунного механизма с одним основным подвижным кривошипным валом и вторым вспомогательным кривошипным валом синхронизации, сделанным неподвижным, жестко скрепленным с фюзеляжем. Изобретение направлено на получение плавного, стабильного, дифференцированного, синхронного, вращательно-колебательного движения лопастей воздушного винта с различными углами атаки при движении кривошипов валов по конусообразной кольцевой траектории. 6 ил.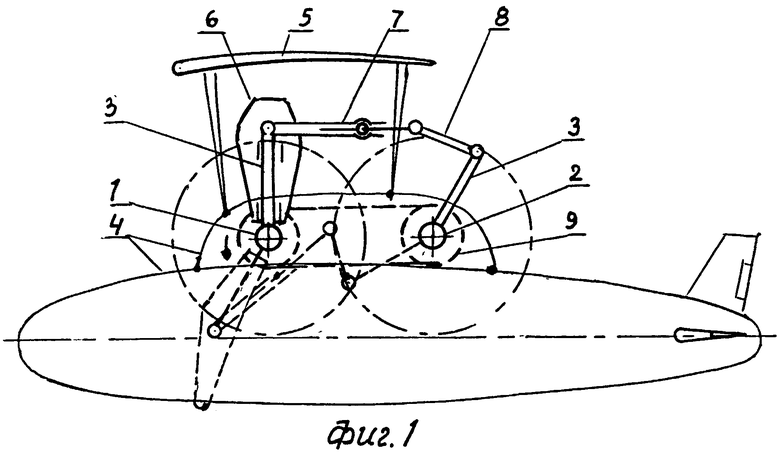
Летательный аппарат - аэроплан с воздушным винтом, расположенным в носовой части фюзеляжа, содержащий фюзеляж с кабиной, опорные колеса, крылья, жестко скрепленные, элероны на крыльях, служащие рулями разворота, киль и стабилизатор с рулями поворота и подъема, расположенные в хвостовой части фюзеляжа, отличающийся тем, что на летательном аппарате применен воздушный винт с махающими лопостями, расположенный по бокам фюзеляжа под крыльями, приводимый кривошипно-шатунным механизмом с двумя кривошипными валами, содержащий основной кривошипный вал и вспомогательный кривошипный вал синхронизации с кривошипами на концах, установленными под углом 30° относительно оси кривошипного вала, который может быть меньше, равным или больше до 180°, выходящими кривошипами наружу по бокам фюзеляжа под крыльями, лопости винта, закрепленные подвижно широкими концами на кривошипах основного кривошипного вала, рычаги поворота лопастей, шарнирно прикрепленных одними концами к широким концам лопастей винта, шатуны, шарнирно связанные одними концами с рычагами поворота лопастей, а другими концами - с кривошипами вспомогательного кривошипного вала синхронизации и привод взаимосвязи кривошипных, валов, при этом кривошипные валы в фюзеляже расположены параллельно между собой и поперечной оси фюзеляжа с передаточным числом вращения 1:1 один к одному в одном направлении, при этом кривошипы основного и вспомогательного кривошипных валов расположены между собой не параллельно, а развернуты кривошипными осями на угол 30° в стороны, который может быть меньше, равным или больше до 180°, в целях получения плавного, стабильного, дифференцированного, синхронного, вращательно-колебательного движения лопастей воздушного винта с различными углами атаки при движении кривошипов валов по конусообразной кольцевой траектории, кроме этого на примененном с махающими лопастями кривошипно-шатунный механизм с двумя вращающими кривошипными валами, предусмотрена постановка кривошипно-шатунного механизма с одним основным подвижным кривошипным валом, а второй вспомогательный кривошипный вал синхронизации делается неподвижным, жестко скрепленным с фюзеляжем с выступающими концами наружу с боков фюзеляжа, а поэтому в качестве альтернативы вместо второго неподвижного кривошипного вала синхронизации ставятся стойки по бокам фюзеляжа, жестко прикрепленные к фюзеляжу одними концами, а вторыми концами стойки шарнирно-кинематически связаны через шатуны с рычагами поворота лопастей воздушного винта, установленными жестко на широких концах лопастей винта снизу перпендикулярно к плоскости винта.
| РЕГУЛЯТОР ТЕМПЕРАТУРЫ ПРЯМОГО ДЕЙСТВИЯ | 1991 |
|
RU2021627C1 |
| СПОСОБ ПЕРЕРАБОТКИ ОРГАНИЧЕСКИХ ОТХОДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2408649C2 |
| МАХОЛЕТ | 1995 |
|
RU2081033C1 |

