Изобретение относится к авиационной технике, представляет собой пилотируемый человеком летательный аппарат с машущим крылом. Цель изобретения - освоение нового эффективного вида аэродинамического полета. Поскольку в природе существует только машущий полет, то попытки полететь человек предпринимал, пытаясь копировать полет птиц, насекомых. Но машущий полет сложен прежде всего тем, что крыло должно создавать и подъемную силу, и тягу одновременно. Но задача была упрощена изобретением самолета с неподвижным крылом, которое создавало только подъемную силу (тягу получали за счет дополнительного движителя - пропеллера или струи газов из сопла реактивного двигателя). Но для получения подъемной силы от неподвижного крыла требовалось его обтекание воздушным потоком с потребной скоростью. Для достижения этой скорости необходимы были длинные взлетно-посадочные полосы, большие аэродромы. У махолета же крыло, махая на месте, может создавать потребные аэродинамические силы для достижения вертикального взлета-посадки (как у вертолета). Таким образом, в будущем махолеты обещают сочетать преимущества как вертолетов (безаэродромность), так и самолетов (высокоэффективный крейсерский полет с большим аэродинамическим качеством и скоростью). Кроме того, машущекрылые ЛА обладают только им присущей малошумностью (из-за низкой инфразвуковой частоты махания крыла), что позволит им базироваться в черте города. Впервые проф. МАИ Киселев В.А. осуществил и продемонстрировал машущий полет в 1981 г. (см. газеты "Комсомольская правда", "Труд", "МК" и др. за 6 ноября 1981 г.). С тех пор были созданы и испытаны радиоуправляемые модели махолетов, выполнены проекты больших пилотируемых машущекрылых ЛА, которые подтвердили правильность принимаемых конструктивно-проектировочных решений. Испытывались машущекрылые ЛА как с одним крылом - двумя консолями ("Журавль"), так и с двумя крыльями, расположенными одно за другим по схеме тандем - четыре консоли ("Стрекоза"). Последняя схема характеризуется тем, что крылья работают в противофазе, то есть, например, когда опускаются передняя правая и задняя левая консоли, то поднимаются передняя левая и задняя правая консоли и наоборот. Эта кинематическая схема обеспечивает неизменное продольное положение центра давления несущей системы в течение всего периода маха. Кроме того, выравнивается по периоду величина подъемной силы несущей системы, спрямляется траектория полета (устраняется ее синусоидальность), выравнивается по периоду и значение потребной мощности (сглаживаются пики мощности), следовательно, снижается потребная мощность двигателя. Для первого пилотируемого махолета приняты наиболее простые, легко осуществимые решения. По этим соображениям из рассматриваемых гидро- и механического приводов машущего крыла выбран последний, хотя он и уступает гидравлическому по гибкости управления ЛА.
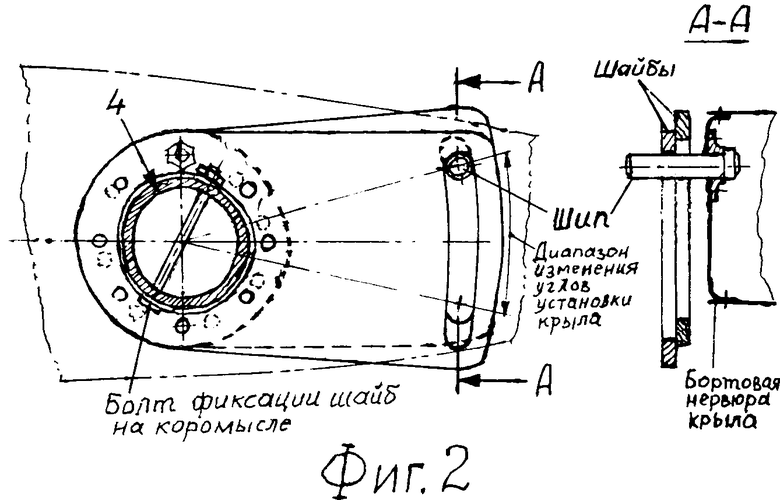
На фиг.1 показан общий вид ЛА в трех проекциях. В процессе махания консоли крыла 1 совершают два вида движения: машущее вокруг продольной оси Х аппарата, которое ограничивается и регулируется длиной шатунов 2 и кривошипа 3, и вокруг проходящей вдоль консоли поперечной оси Z. Можно предложить несколько устройств, регулирующих повороты крыла вокруг оси Z, изменяющих его установочные углы, например, с помощью шипа, установленного на бортовой нервюре и перемещающегося в вырезе шайб, закрепленных на коромысле 4 крыла, сообщающем консолям машущее движение, - фиг.2. С помощью взаимного перемещения (поворота) шайб устанавливается потребный диапазон углов установки крыла. Коромысло 4 крепится шарнирно к балкам фюзеляжа 5 и совершает машущее движение под действием шатуна и кривошипа. Фюзеляж представляет собой стержневую систему (ферму, усиленную местными балками), объединяет все части ЛА. К фюзеляжу крепятся крылья с трансмиссией и редуктором, двигатель 6 с моторамой, топливной системой, командные рычаги и проводка системы управления, кресло пилота, горизонтальное, вертикальное и переднее оперение, главное и переднее шасси, хвостовой костыль. В данном аппарате кривошипно-шатунный механизм, его вал, редуктор смещены вправо, что освобождает место для пилота с командными рычагами управления, облегчает компоновку ЛА. Но смещение вала кривошипно-шатунного механизма вбок от плоскости симметрии аппарата приводит к некоторой несимметрии движения правых и левых консолей крыла, что может вызвать поперечные (боковые) колебания аппарата, привести к затруднениям его пилотирования. Для проверки этого возможного недостатка была построена радиоуправляемая модель-аналог, которая дала ответ на указанные опасения и подтвердила, что по известным причинам опасные колебания не проявляются. В крайних точках изменения направления скорости махания крыла изменяют направления и ускорения, возникают инерционные силы. Чтобы использовать их с пользой для снижения потребной мощности привода, применяются аккумуляторы инерционных сил 7. Конструктивно они могут представлять собой пружины, резиновые жгуты, пневмоцилиндры с поршнями.
Чтобы обеспечить крылу необходимую амплитуду маха, крылья располагаются по высокопланной схеме, причем для уменьшения высоты ног шасси угол маха вниз сделан меньше угла взмаха вверх. Это потребовало придать коромыслам положительную V-образность. Высокорасположенное машущее крыло приводит к поднятию вверх и вектора тяги, что вызывает появление значительного пикирующего момента. Для снижения отрицательной уравновешивающей силы на хвостовом горизонтальном оперении - ГО (8) используется дополнительное переднее горизонтальное оперение - ПГО (9), создающее положительную силу из условия продольной балансировки аппарата. Желательно, чтобы переднее горизонтальное оперение имело малое удлинение для снижения Су, что уменьшает его дестабилизирующее влияние, увеличивает критические углы атаки. Горизонтальное оперение ГО снабжено элевонами 10, работающими как рули высоты или как элероны для продольного или поперечного управления. Элевоны имеют весовые балансиры, обеспечивающие их полную весовую балансировку. Вертикальное оперение - ВО (11) состоит из киля и руля поворота - РП (12).
Система управления смешанного типа: жесткие дюралевые трубы и гибкие тросы. Командные рычаги типовые: ручка для управления по тангажу и крену, педали для путевого управления и торможения. Шасси состоит из главных опор с колесами 13, передних колесных опор 14 и хвостового костыля 15. Топливный бак 16 максимально приближен к центру тяжести аппарата.
Крылья и оперение имеют лонжеронную конструктивно-силовую схему. В конструкции используются дюралюминий (Д16Т), высокопрочный титан (ВТ-20,-22), угле- и стеклопластики и др. Обшивка - синтетические пленки.
Из последних наиболее совершенных пилотируемых махолетов известен ЛА с машущим крылом, построенный американско-канадской группой, возглавляемой профессором Торонтского университета Джеймсом Делориером («Популярная механика», декабрь 2006, Дорога к мечте, с.90 - 95 - прототип). Махолет Делориера (прототип) имеет крыло с двумя консолями, следовательно, теряет описанные преимущества схемы «стрекоза» с четырьмя консолями. У прототипа консоль крыла не может поворачиваться вокруг оси коромысла, легко обеспечивая нужную регулировку угла установки, как у предлагаемого ЛА. У прототипа эта проблема решается сложным подбором крутильной жесткости консоли, обеспечивающей потребные значения установочных углов. Кроме того, такое крыло отличается однорежимностью, что ограничивает, снижает возможный диапазон полетных режимов. Прототип имеет нерациональные привод и установку консолей крыла. Центры маха крыла разнесены относительно плоскости симметрии аппарата ХOУ. У заявляемого нами ЛА центры маха крыльев лежат в плоскости симметрии. В результате при одинаковых размахах и амплитудах смахиваемая (сметаемая) крылом плоскость у заявляемого аппарата намного больше, чем у прототипа, что дает дополнительные преимущества заявляемому ЛА по сравнением с прототипом в потенциальном увеличении создаваемых аэродинамических сил. Прототип не имеет аккумуляторов инерционных сил машущего крыла, что приводит к возрастанию нагрузок на двигатель и к потере соответствующей его мощности. В итоге автору Д.Делориеру не удалось построить летающий пилотируемый махолет.
После проведения первого этапа испытаний предлагаемого аппарата планируется защитить пилота легкой несиловой пластиковой кабиной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1990 |
|
RU2014247C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМ КРЫЛОМ | 2010 |
|
RU2452660C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| МАХОЛЕТ | 2008 |
|
RU2369526C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МАХОЛЕТ | 2011 |
|
RU2467923C1 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| УСТРОЙСТВО МАШУЩИХ КРЫЛЬЕВ С ЦИКЛИЧЕСКОЙ КРУТКОЙ И УПРАВЛЕНИЕМ ПО КРЕНУ | 2005 |
|
RU2298509C2 |
Изобретение относится к области авиации, в частности к конструкции летательных аппаратов с машущими крыльями. Пилотируемый летательный аппарат содержит фюзеляж, оперение, шасси, два крыла (четыре консоли), машущих в противофазе, силовую установку. Консоли крыльев установлены на поперечных балках-коромыслах и могут поворачиваться вокруг них, достигая оптимальной установки, и также имеют аккумуляторы инерционных сил крыльев. Коромысла, на которых установлены крылья, имеют положительную V-образность, что при сохранении суммарной величины угла маха уменьшает угол маха вниз и позволяет уменьшить высоту стоек шасси. Летательный аппарат содержит дополнительное переднее горизонтальное оперение для снижения отрицательной уравновешивающей силы на хвостовом горизонтальном оперении от высокорасположенного крыла, создающего пикирующий момент. Кривошипно-шатунный механизм привода крыльев смещен вбок от плоскости симметрии ХОУ. Достигается сглаживание пиков потребляемой мощности и снижается потребная мощность двигателя. 3 з.п. ф-лы, 2 ил.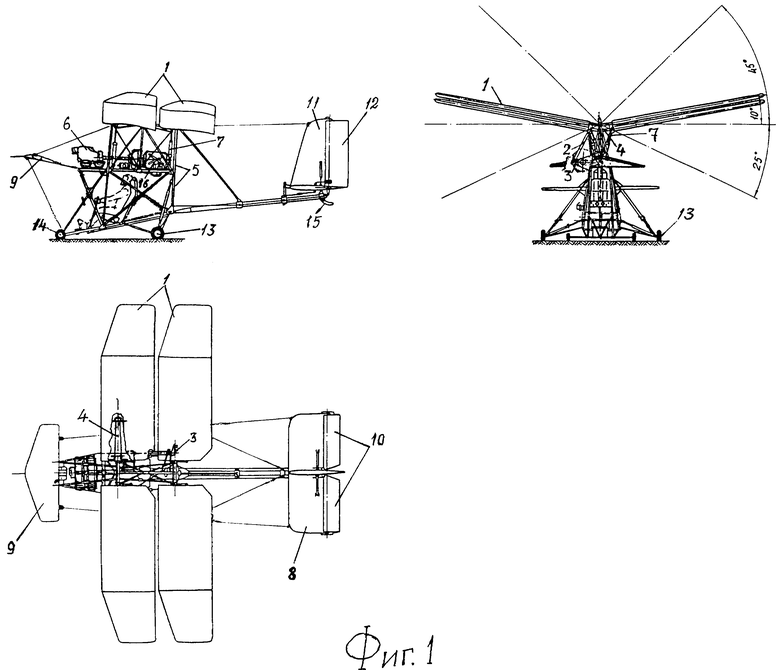
1. Пилотируемый летательный аппарат, содержащий фюзеляж, оперение, шасси, два крыла (четыре консоли), машущих в противофазе, силовую установку, отличающийся тем, что консоли крыльев установлены на поперечных балках - коромыслах и могут поворачиваться вокруг них, достигая потребной оптимальной установки, и также имеют аккумуляторы инерционных сил крыла.
2. Аппарат по п.1, отличающийся тем, что коромысла, на которых установлены крылья, имеют положительную V-образность, что при сохранении суммарной величины угла маха уменьшает угол маха вниз и позволяет уменьшить высоту ног шасси.
3. Аппарат по п.1, отличающийся тем, что используется дополнительное переднее горизонтальное оперение для снижения отрицательной уравновешивающей силы на хвостовом горизонтальном оперении от высокорасположенного крыла, создающего пикирующий момент.
4. Аппарат по п.1, отличающийся тем, что для размещения места пилота кривошипно-шатунный механизм привода крыла смещен вбок от плоскости симметрии ХОY, что, как показали эксперименты, не приводит к недопустимым колебаниям по крену.
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ИСПОЛЬЗОВАНИЕМ МАШУЩИХ КРЫЛЬЕВ ("СТРЕКОЗА") | 2008 |
|
RU2375253C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 1997 |
|
RU2128132C1 |
| CN 101734375 A, 16.06.2010 | |||
| КАРУСЕЛЬНАЯ МАШИНА ДЛЯ ЛИТЬЯ В ПОСТОЯННЫЕ ФОРМЫ | 1937 |
|
SU52483A1 |

