Рычажное соединение Пересекающиеся Рычаги Стрекоза (РСПРС) для рычажных качелей, или игрушки Стрекоза, или привода для крыльев или весел, или множителя одновременно выполняемых операций в простейшем случае представляет из себя одноподвижную вращательную кинематическую пару с геометрическим замыканием (т.к. с помощью всего двух звеньев оно передает всю суть работы четырех крыльев стрекозы (фиг.6-7, 42-44, 22)) содержит два звена в виде пересекающихся на оси рычагов и может быть использовано в сельском хозяйстве, в промышленности, в том числе в машиностроении (в авиации и кораблестроении) для создания устройств максимально эффективно воздействующих на среду, рычажных качелей, игрушки Cтрекозы, как множитель одновременно выполняемых операций для оптимизации механизированных устройств везде, где используются обычные и составные рычаги.
Предшествующий уровень техники.
Хоть закон рычага и был описан Архимедом в III в. до н. э., а сам рычаг использовался человеком еще задолго до рождения ученого, но про пересечение 2х рычагов на одной оси до сих пор нигде не упоминалось.
Техническая задача.
Задача состоит в том, чтобы после пересечения 2 рычага так и остались 2-мя рычагами, т.е. сохранили способность к независимым друг от друга поворотам вокруг оси.
Решение задачи.
Решить противоречие, когда рычаги сохраняют способность к независимым поворотам после пересечения, помогает форма рычагов в виде обхода (фиг.1), или вырезы в обходах, расположенных между рычагами (фиг.33-37), благодаря которым в районе пересечения исключаются контакты рычагов друг с другом и с осью, препятствующие их независимым поворотам вокруг оси. Под обходами подразумеваются детали, соединяющие диагональные пары одноплечих рычагов, в результате чего получаются пересекающиеся двуплечие рычаги (ясно, что одноплечие рычаги пересекаться на оси не могут). Соединить два одноплечих рычага, обойдя точку пересечения с другим рычагом – это основная задача обхода, которая решается тем, что обходы выходят из плоскости в пространство и скрещиваются. Т.о. пересечение рычагов происходит через скрещивающиеся обходы.
Хорошо объясняет назначение обходов следующий пример: если 2 дороги пересекаются в 1 плоскости, то одновременное движение по ним невозможно, но если пересечение происходит через мост или тоннель, то появляется возможность одновременного движения. Обход в данном случае и является тем мостом, решающим противоречие, той деталью, которая в районе пересечения разводит рычаги в пространстве, благодаря которой концы одного рычага движутся в параллельных плоскостях совместно с концами другого рычага (в одной плоскости движутся 2 конца разных рычагов).
Раскрытие изобретения.
РСПРС состоит из 2-х пересекающихся на оси (или валу: если один из рычагов жестко скреплен с осью, то она превращается в вал, который может передавать крутящий момент этого рычага или этому рычагу) рычагов (коромысел, т.к. после пересечения рычаги не могут делать полный оборот вокруг оси, то они являются коромыслами). Удобно объяснить на конкретном примере: если на одну ось одну за другой надеть 2 дверные петли, то получим 4 одноплечих рычага на оси, попарно расположенные друг против друга (фиг.1), если теперь соединить диагональные пары рычагов обходами в виде дуг (или другой формы), получим РСПРС с одной точкой скрещивания (фиг.2), если на ось надеть еще 1 петлю и так же соединить диагональные пары, то получим РСПРС с 2-мя точками скрещивания, и у 2х пересекающихся рычагов будет уже 6 концов или плеч, и т.д., n точек пересечения – 2n+2 конца (каждый рычаг имеет n+1 плечо).
Краткое описание чертежей.
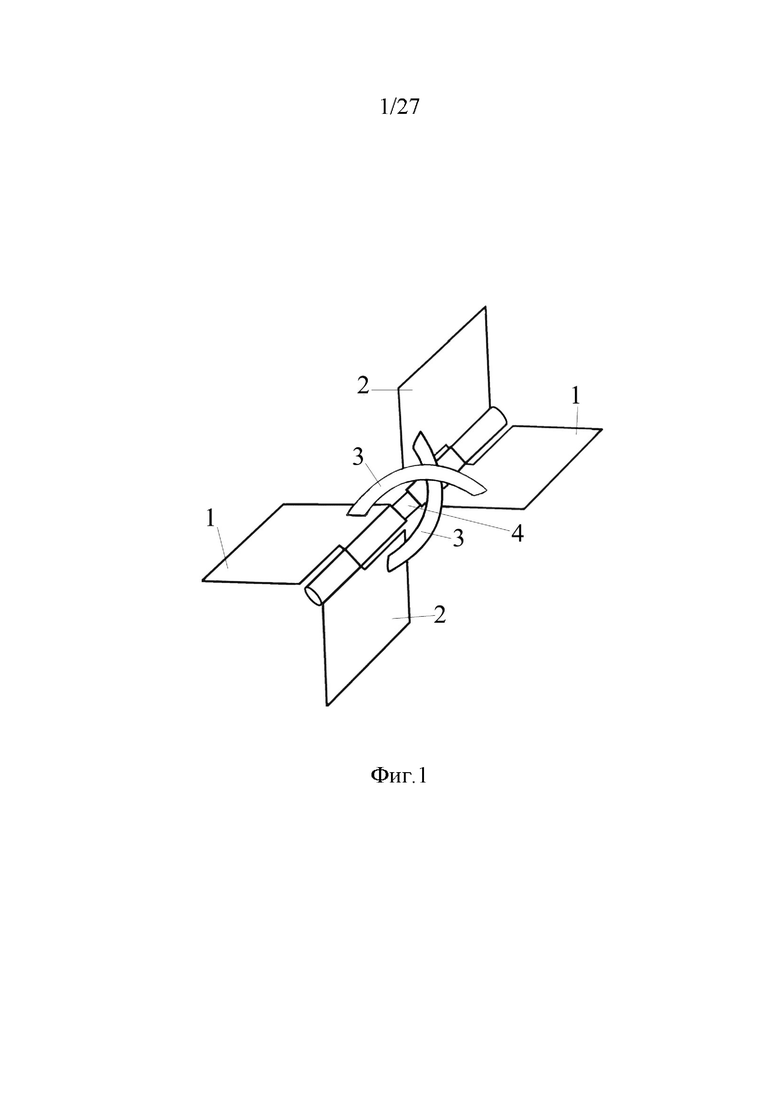
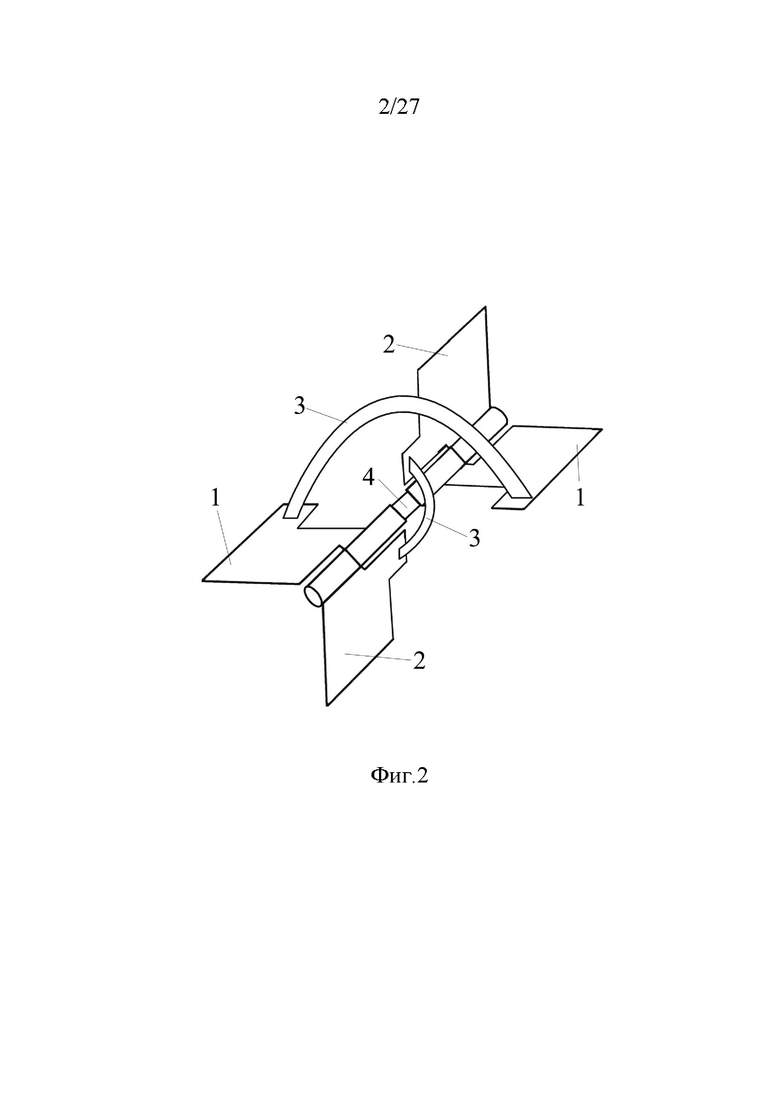
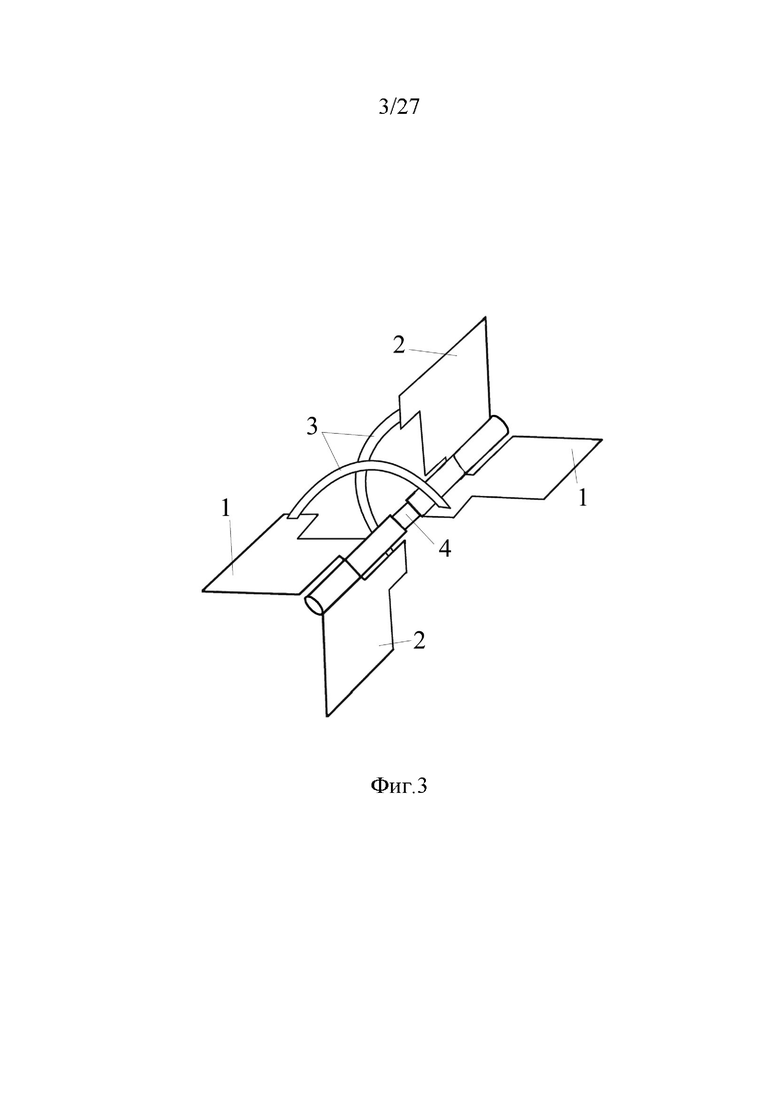
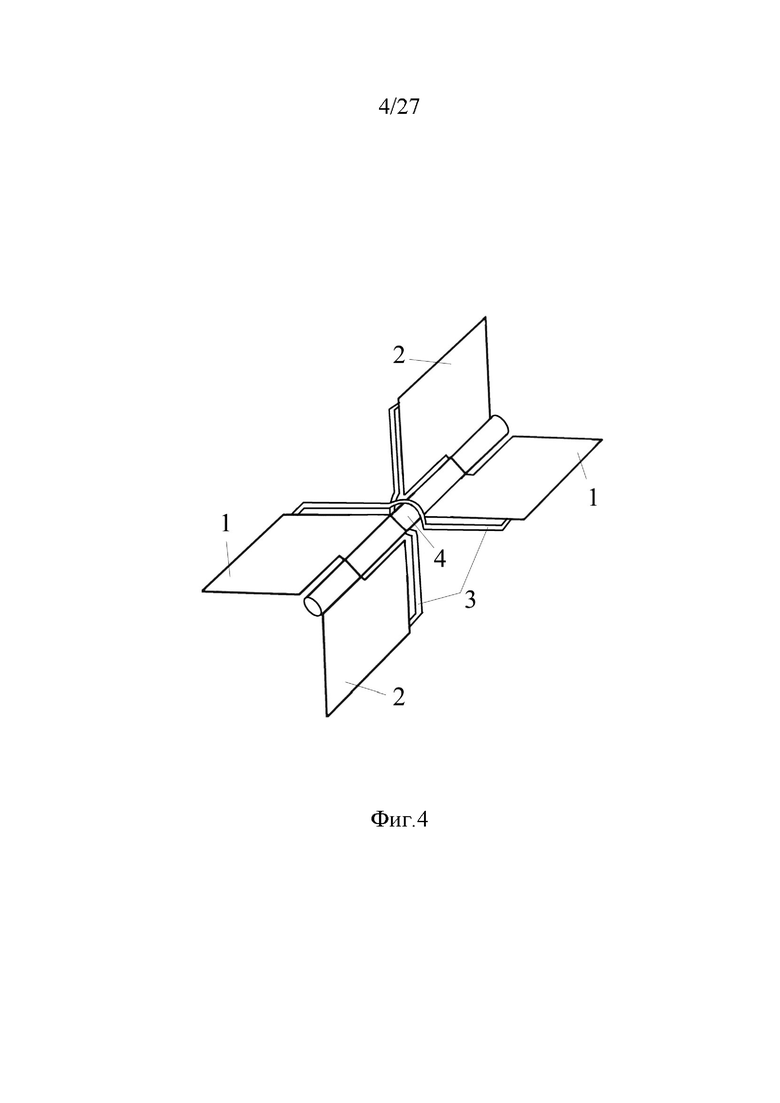
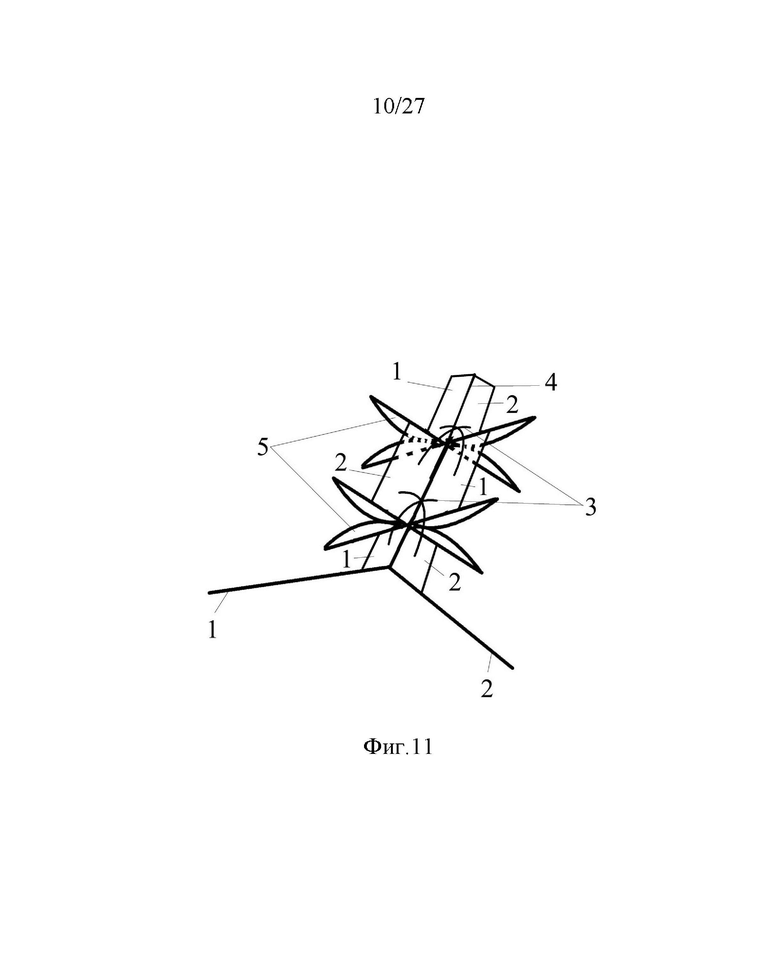
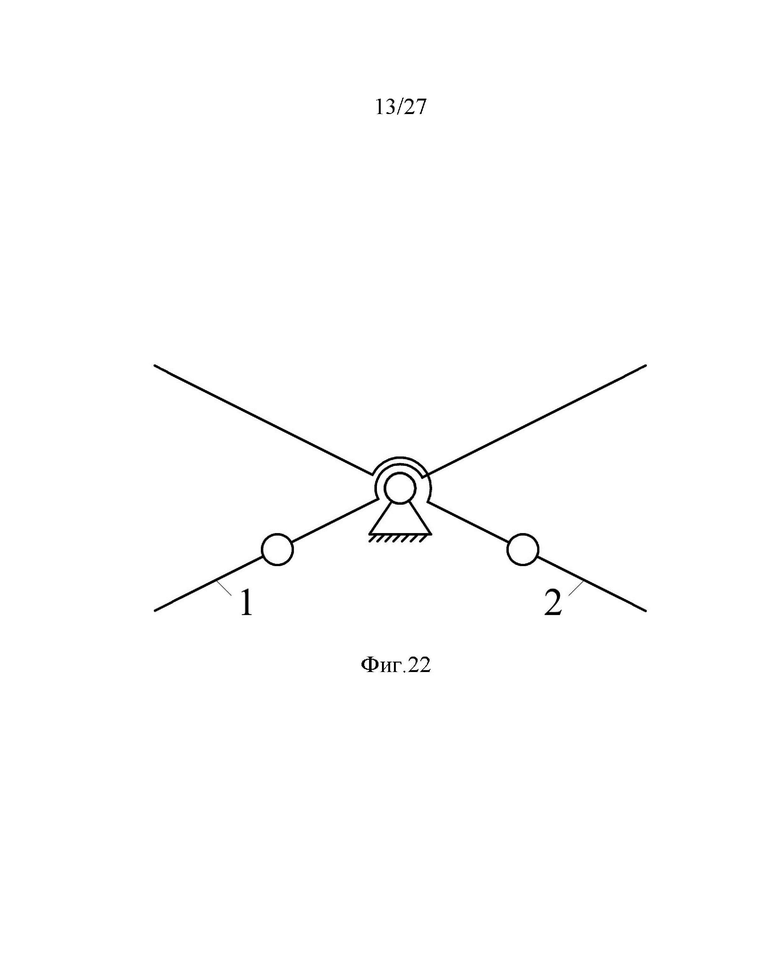
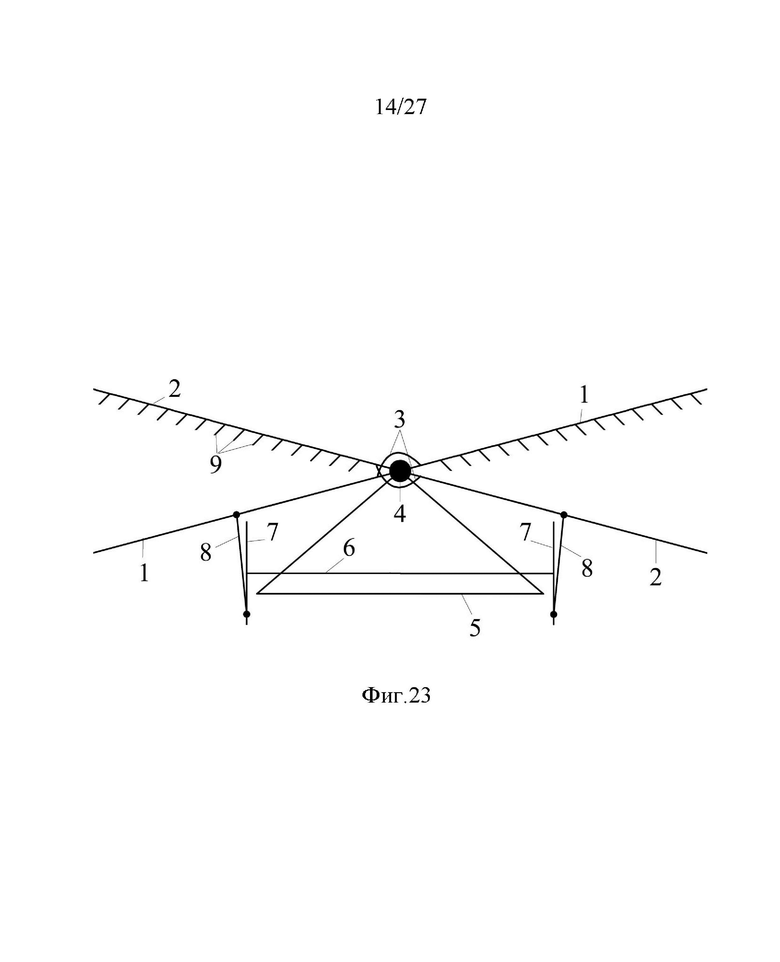
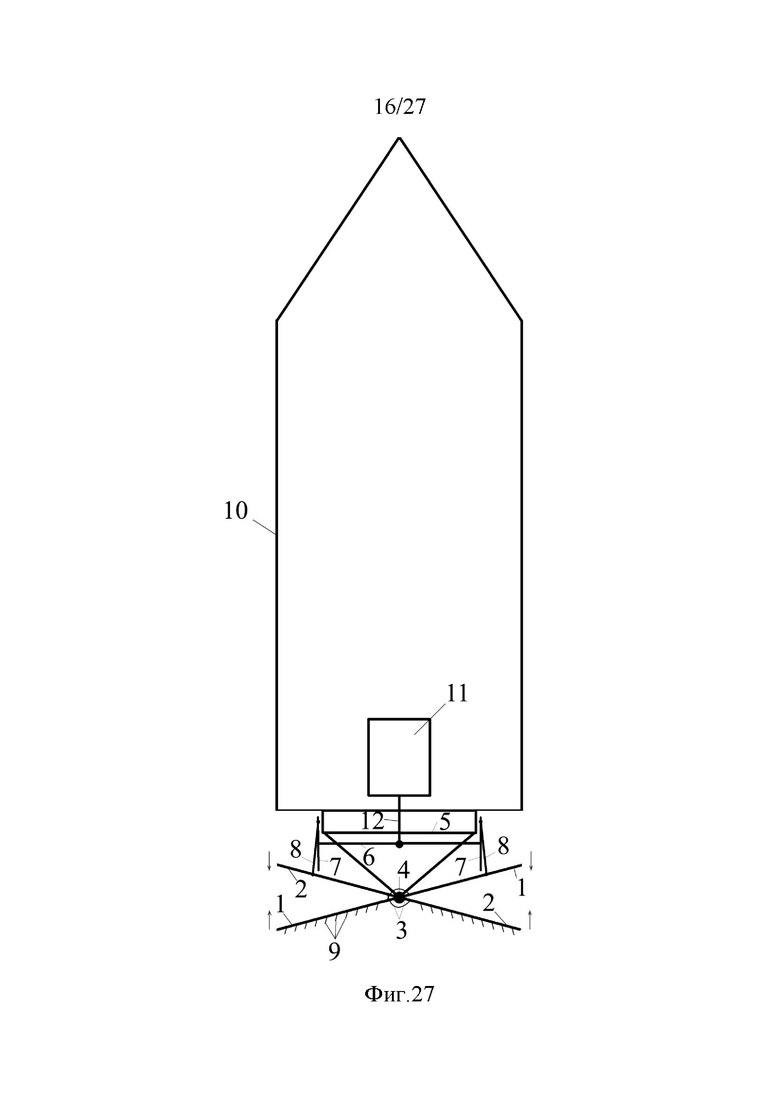
На фиг.1, 2, 3, 4, 5, 6, 7, 8, 9, 11, 23, 27 следующие обозначения: 1- первый рычаг, 2- второй рычаг, 3 – обходы, 4 – ось.
На фиг.1 обходы – 3 обходят ось – 4 с одной стороны (в этом случае один из обходов должен обойти и ось, и другой обход).
На фиг.2 у рычагов вырезы, обходы также обходят ось с одной стороны.
На фиг.3 у рычагов вырезы, обходы обходят ось с разных сторон.
На фиг.4 представлены Z образные обходы, которые обходят ось с разных сторон.
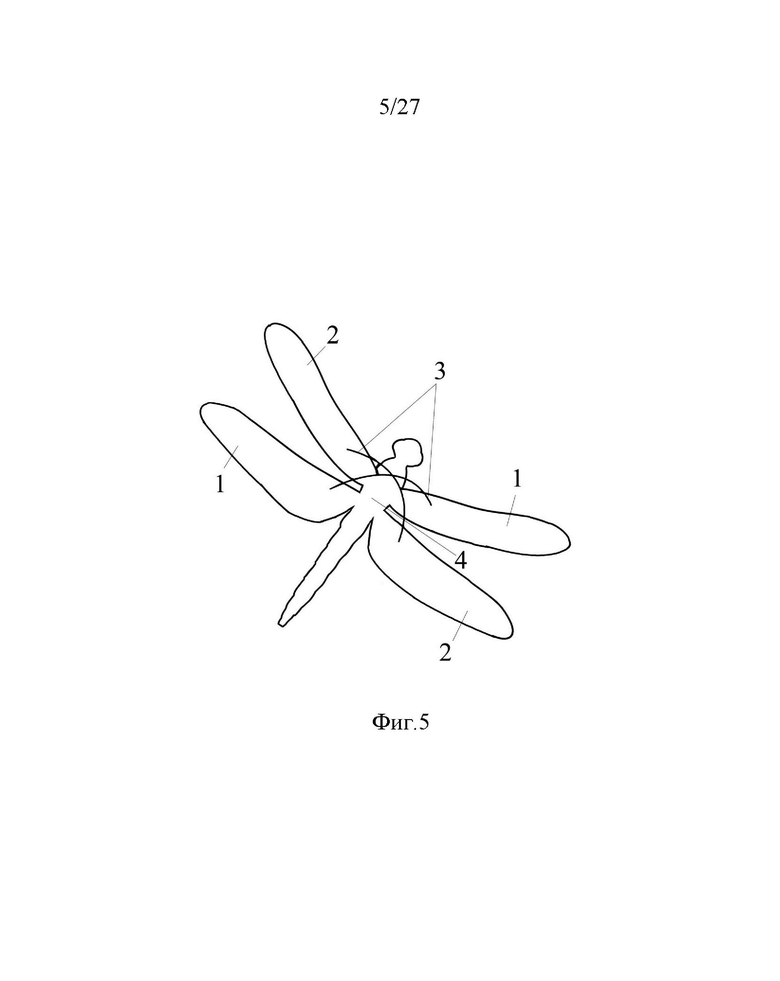
На фиг.5 нарисована стрекоза.
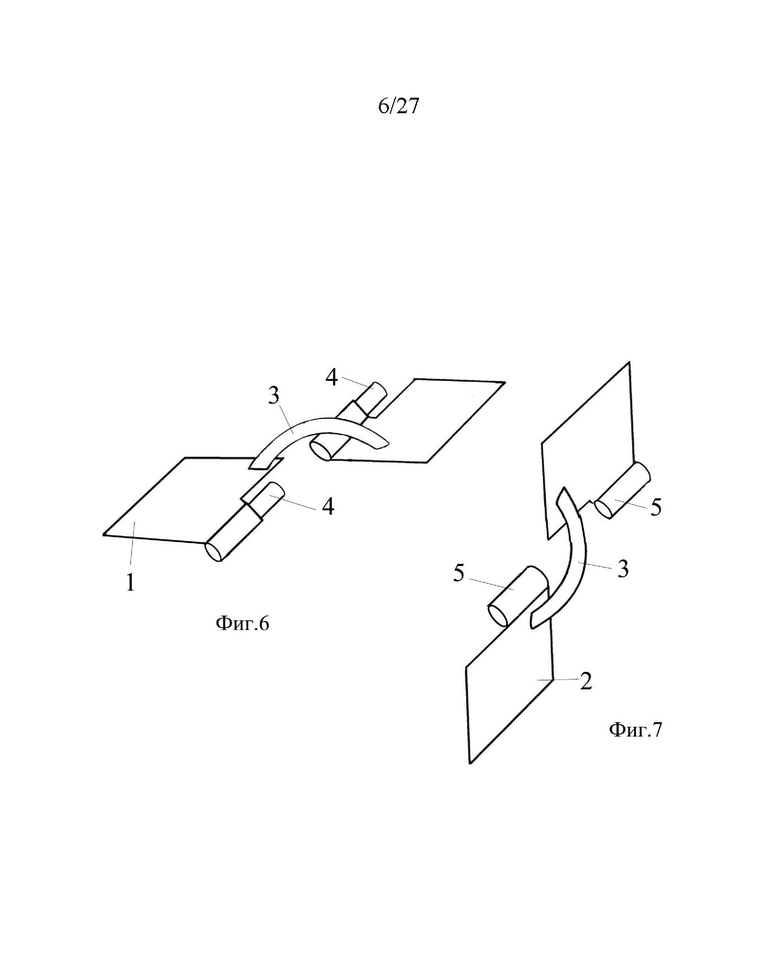
На фиг.6,7 ось 4 состоит из 2х фрагментов, жестко связанных с рычагом 1, 5 – это обхваты (куда вставляются фрагменты оси 4), благодаря им рычаг 2 удерживается на фрагментах оси 4.
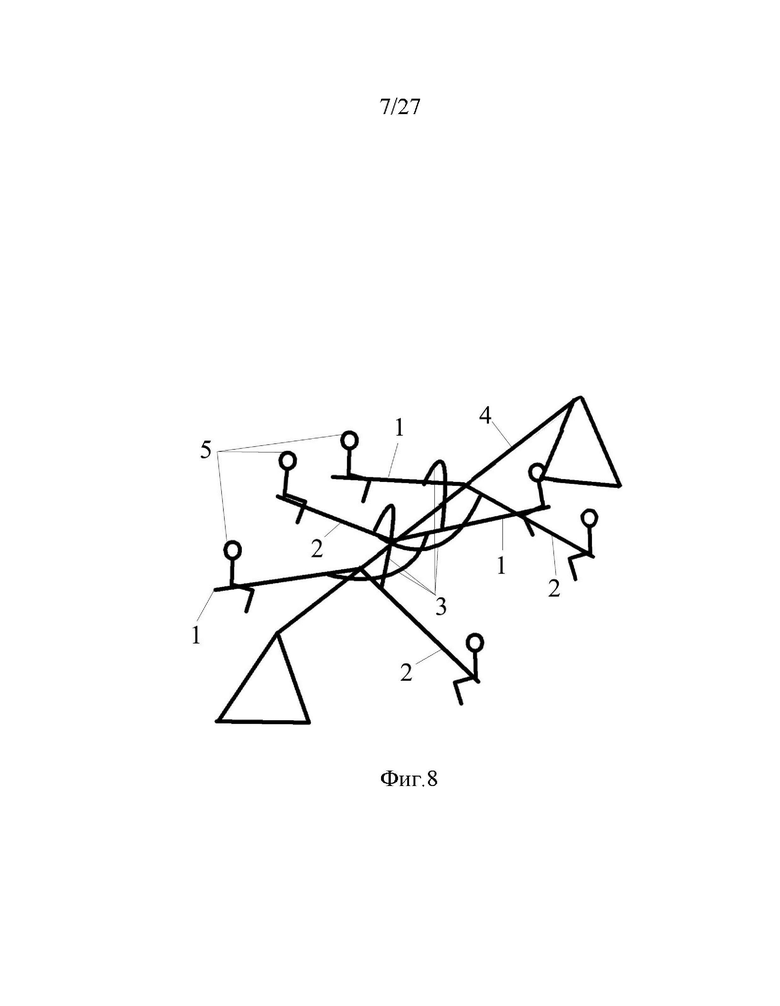
На фиг.8 рычажные качели, здесь 2 точки скрещивания и 6 качающихся (5 – это качающиеся).
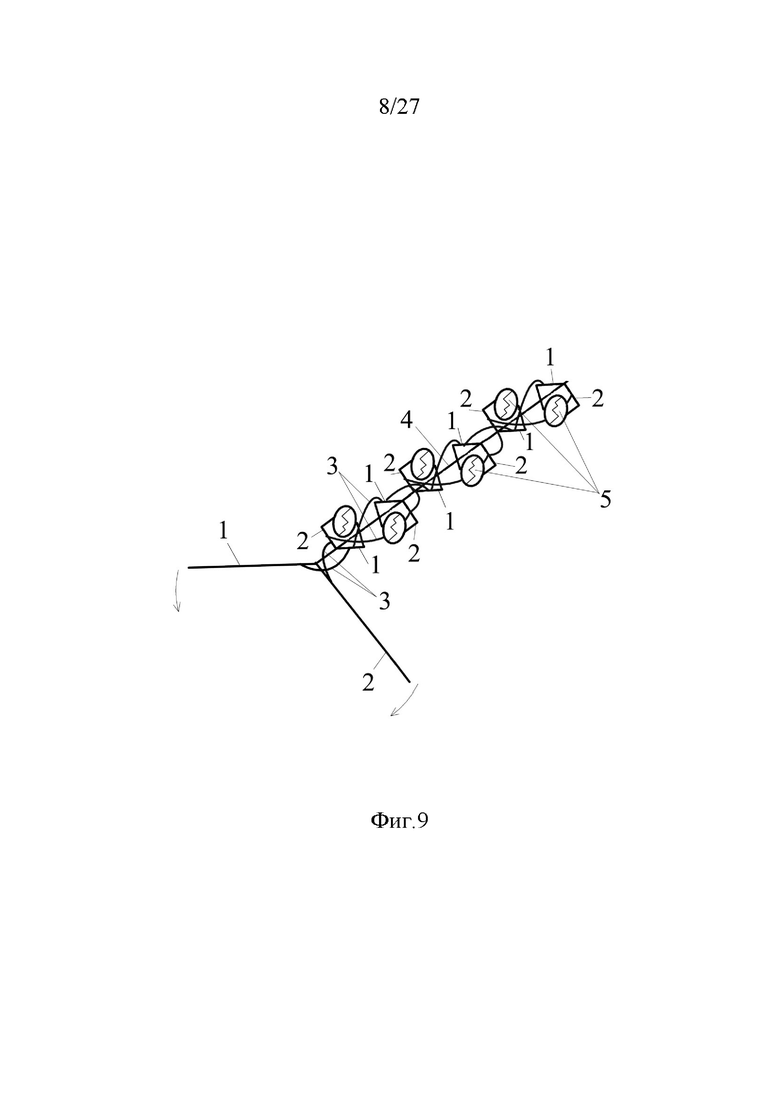
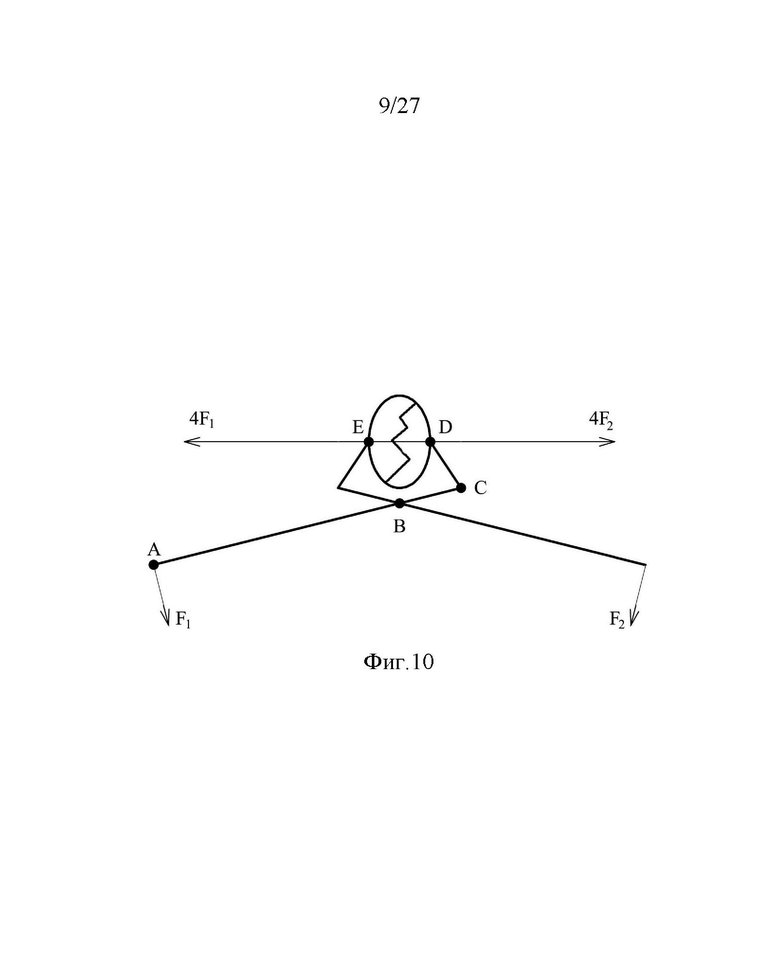
На фиг.9 устройство для одновременного раскалывания 6 орехов, к длинным концам рычагов 1 и 2 прикладывается сила, направленная вниз, которая раскалывает 6 орехов короткими концами, здесь 6 точек пересечения и у двух рычагов 14 концов (5 – это орехи).
На фиг.10 показаны силы, действующие на орех устройством из фиг.9, здесь АВ/ВС=4.
На фиг.11 устройство с 4-я одновременно режущими ножницами, если заточить оба края у ножниц, то станет возможно резать без холостого хода: и при отклонении длинных концов рычагов вниз, и при поднятии вверх от положения равновесия, здесь 2 точки скрещивания и 6 концов (5 – это ножницы).
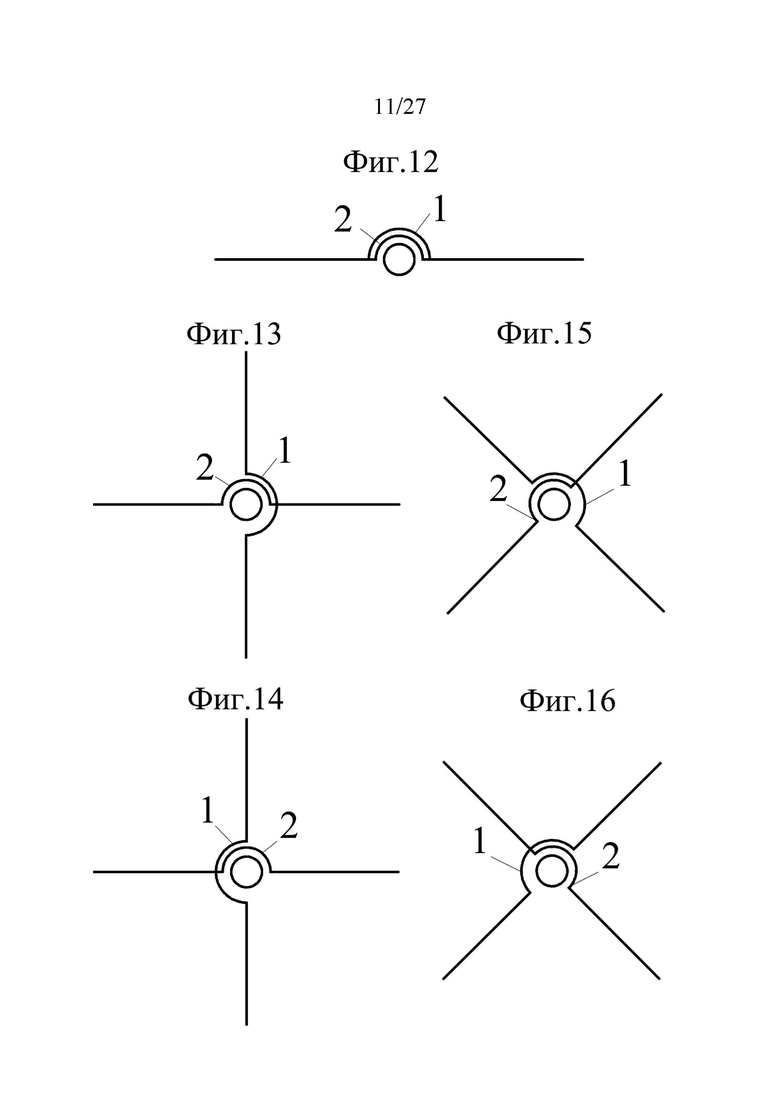
На фиг.12-16 показаны примеры углов поворотов РСПРС.
На фиг.12 рычаги 1 и 2 расположены в одной плоскости, назовем это положением равновесия и все углы указаны относительно этой плоскости. (Но это не обязательно, чтобы соединении 2х одноплечих рычагов происходило под 180°, если это необходимо, они могут соединяться под любым углом (получатся кривые рычаги (коромысла)), но тогда у них не будет возможности расположиться в 1 плоскости.)
На фиг.13 рычаг 1 поворачивается на 90° по часовой стрелке.
На фиг.14 рычаг 1 поворачивается на 90° против часовой стрелки.
На фиг.15 рычаг 1 поворачивается на 45° по часовой стрелке, а рычаг 2 поворачивается на 45° против часовой стрелки, ближние концы рычагов 1 и 2, расположенные в одной плоскости, опустились вниз, а дольние концы, расположенные в параллельной плоскости, поднялись вверх на тот же угол.
На фиг.16 рычаг 1 поворачивается на 45° против часовой стрелки, а рычаг 2 поворачивается на 45° по часовой стрелке, фиг.15,16 - это и есть принцип работы крыльев стрекозы, работающих в противофазе: при поднятии одной пары концов рычагов, другая пара опускается и наоборот (другими словами – встречные повороты пересекающихся рычагов).
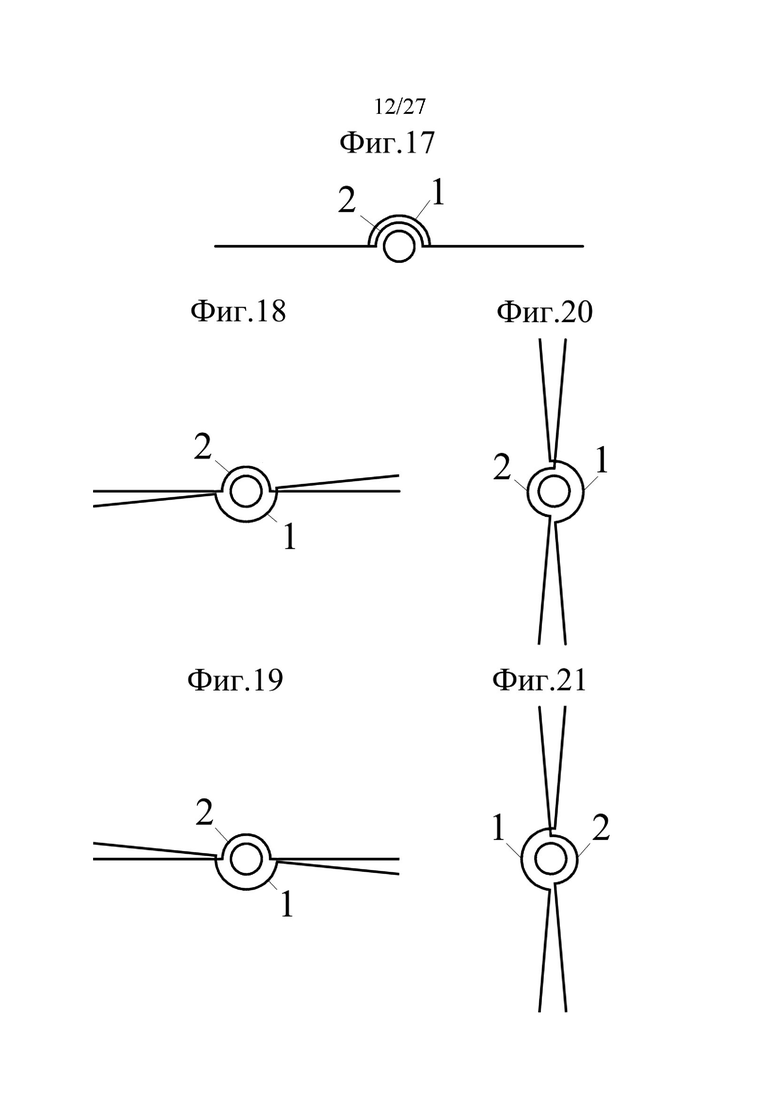
На фиг.17-21 примеры углов поворотов в случае решения проблемы встречи обходов с рычагами.
На фиг.17 - положение равновесия.
На фиг.18 - рычаг 1 поворачивается на 175° по часовой стрелке.
На фиг.19 рычаг 1 поворачивается на 175° против часовой стрелки.
На фиг.20 рычаг 1 поворачивается на 85° по часовой стрелке, а рычаг 2 поворачивается на 85° против часовой стрелки (встречные повороты).
На фиг.21 рычаг 1 поворачивается на 85° против часовой стрелки, а рычаг 2 поворачивается на 85° по часовой стрелке (встречные повороты).
На фиг.22 структурная схема двухзвенного шарнирного механизма, образованного пересекающимися рычагами 1 и 2.
На фиг.23 пример привода для крыльев или весел - устройства эффективного воздействия на среду, являющегося 5 звенным шарнирным или сдвоенно кривошипно-коромысловым механизмом (звенья: 2 коромысла, 2 шатуна, 1 сдвоенный кривошип, стойка – 0 звено): к оси – 4 крепится рама – 5, на которой установлен вал – 6, на концах которого жестко закреплены кривошипы – 7 шарнирно соединенные через шатуны – 8 с рычагами (коромыслами) 1 и 2, все 4 конца рычагов 1 и 2 соединяются с крыльями-веслами-жалюзями с клапанами – 9 (фиг.40). Привод от двигателя подводится к валу 6.
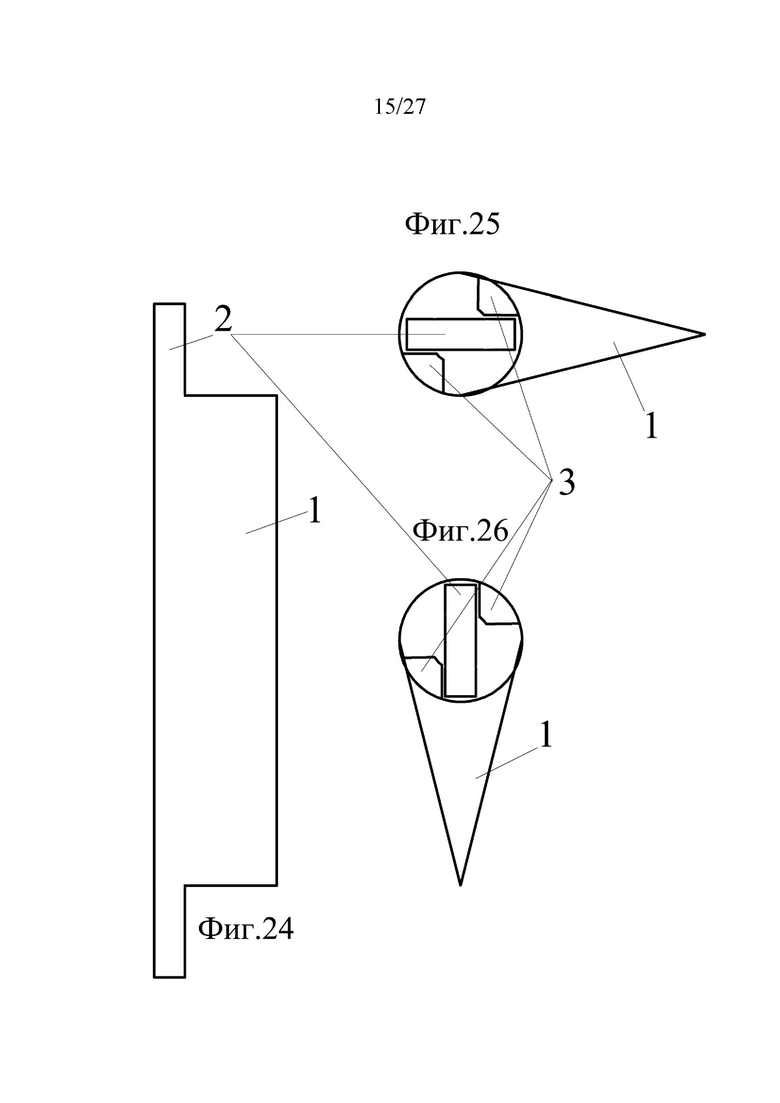
На фиг.24-26 клапан – 1 на оси – 2 с концами прямоугольной формы и ограничителями – 3, ограничивающими угол поворота клапанов, который должен обеспечивать гарантированное закрывание (при раскрытии клапанов на углы >90°, они гарантированно не закроются, а значит угол должен быть < 90°).
На фиг.27 корабль – 10 на котором в качестве движителя установлено устройство из фиг.23, работающее от двигателя – 11 через привод – 12 подведенного к валу – 6, ближние от корабля концы рычагов 1 и 2 движутся от корабля, толкая его вперед, т.к. клапаны 9 закрыты, дальние от корабля концы рычагов 1 и 2 движутся к кораблю, пропуская воду сквозь себя, т.к. клапаны 9 открыты, дойдя до крайних положений, рычаги остановятся, а затем начнут поворачиваться в обратном направлении, давление воды закроет открытые клапаны и откроет закрытые, и концы рычагов поменяются ролями.
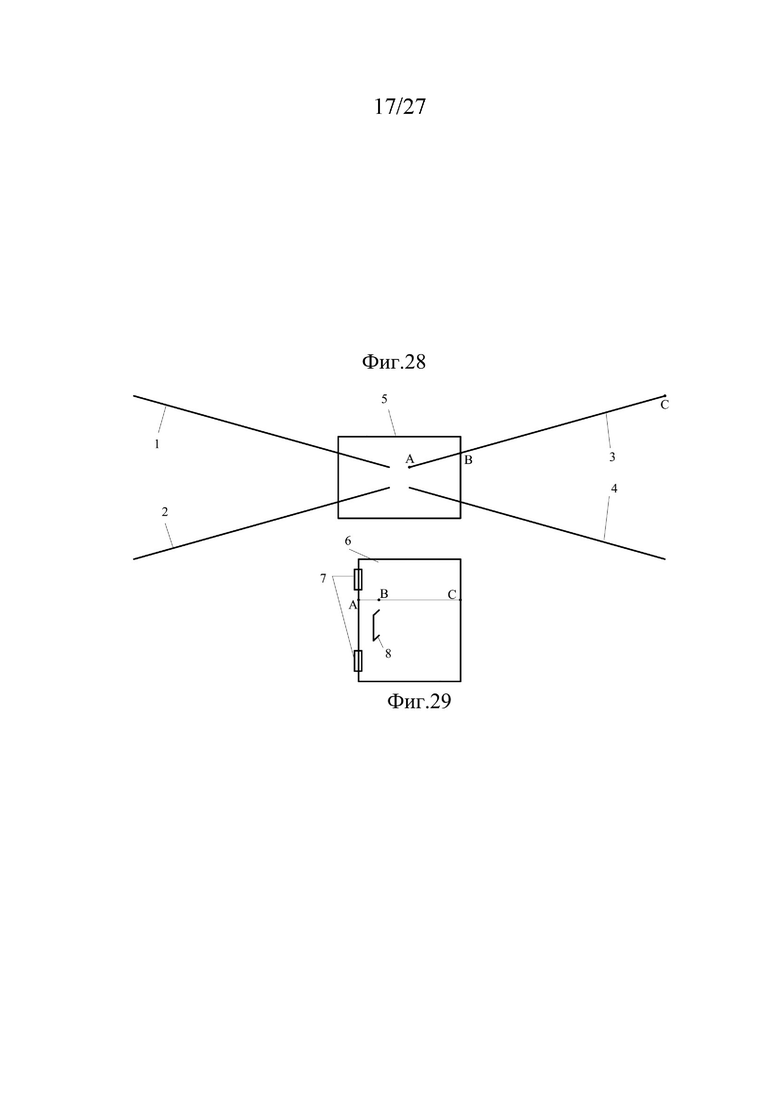
На фиг.28-29 образно показана проблема попытки махать крыльями из фюзеляжа, 1,2,3,4 – крылья, 5 – фюзеляж, АВ – плечо силы приложения, ВС – плечо силы сопротивления, 6 – дверь, 7 – дверные петли, 8 – дверная ручка, ВС/АВ=4 и для двери, и для крыла.
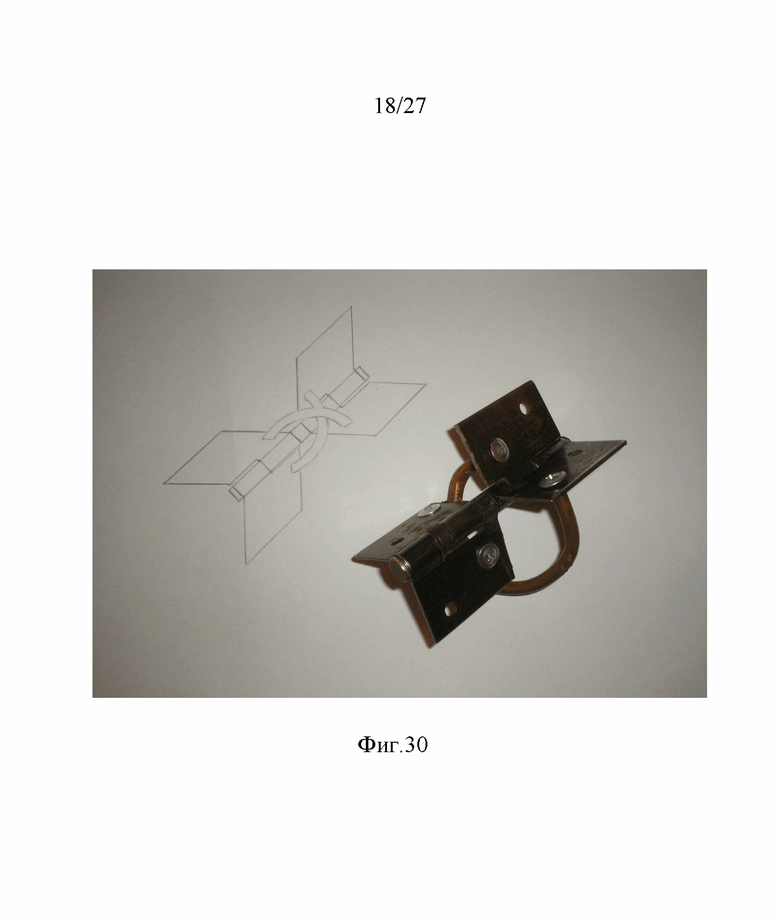
На фиг.30,31 фото рычажного соединения Пересекающиеся Рычаги Стрекоза (РСПРС), сделанного из дверной петли.
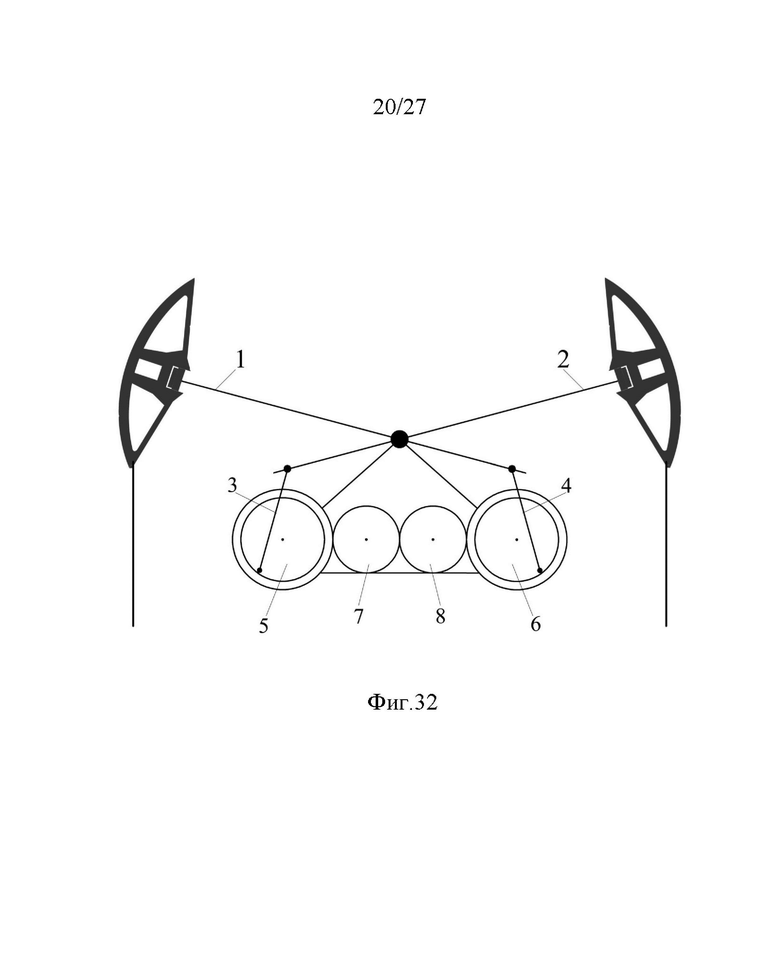
На фиг.32 еще пример использования РСПРС как множителя одновременно выполняемых операций в качестве нефтяных качалок. В кривошипно-коромысловом механизме с зубчатой передачей пересекающиеся рычаги (коромысла) 1 и 2 являются качалками, с других концов соединенные через шатуны 3,4 с кривошипами 5,6, являющимися зубчатыми колесами и сцепленными друг с другом через зубчатые колеса 7,8, применяемые здесь для увеличения плеча приложения кривошипа к рычагу (коромыслу). Привод от двигателя подводится к любому из зубчатых колес. Т.к. концов у пересекающихся рычагов может быть сколько угодно, то и работающих от одного двигателя качалок может быть сколько угодно.
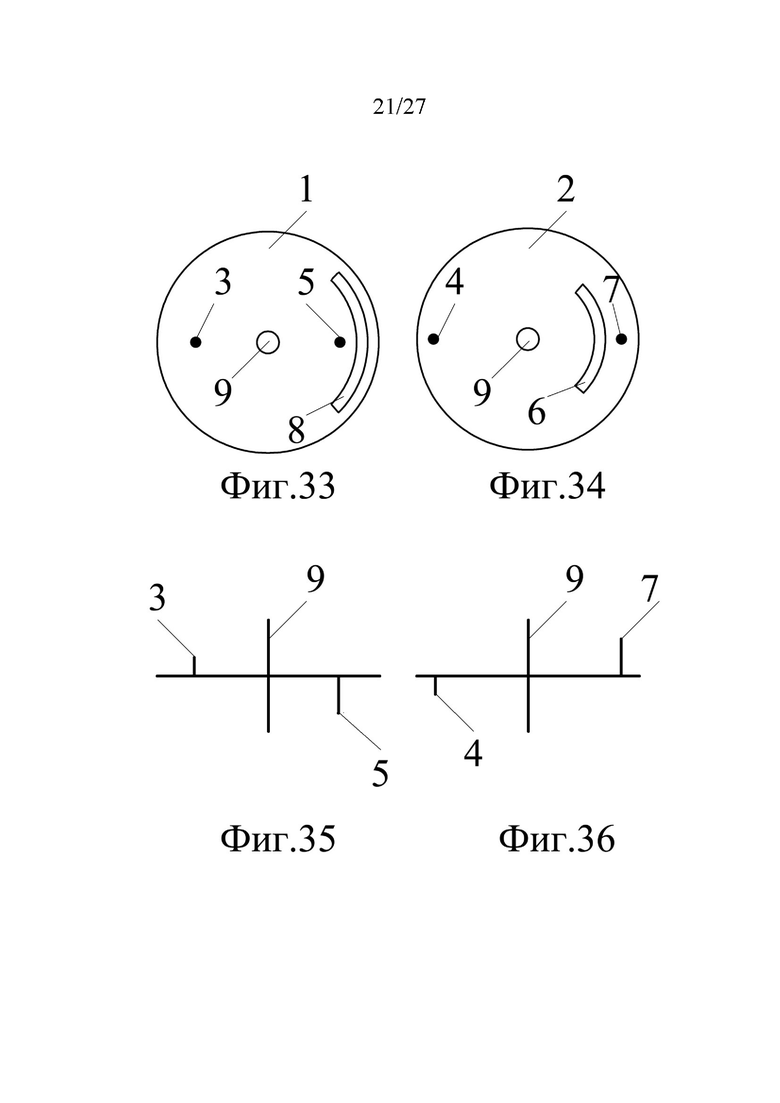
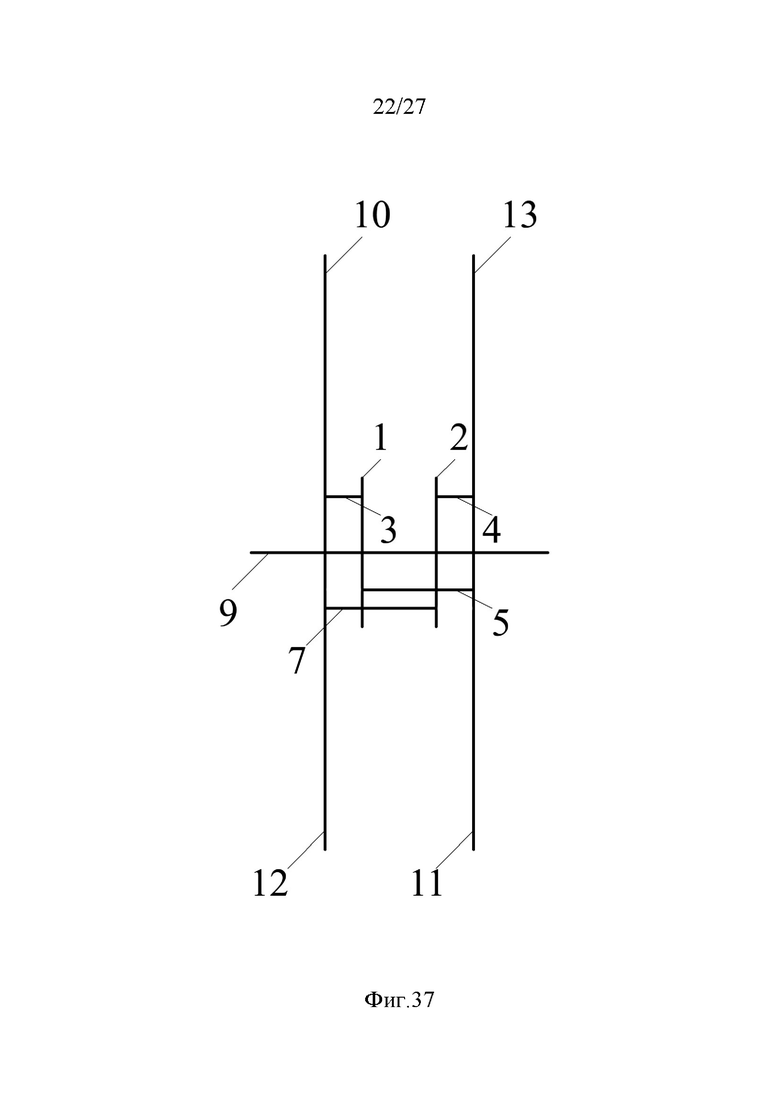
На фиг.33-37 показан способ пересечения через вырезы в обходах, расположенных между рычагами. Диагональные пары рычагов соединяются следующим образом: с колесом 1 рычаг 10 соединяется креплением 3, а рычаг 11 креплением 5, причем крепление 5 проходит через вырез 6 в колесе 2; с колесом 2 рычаг 13 соединяется креплением 4, а рычаг 12 креплением 7, причем крепление 7 проходит через вырез 8 в колесе 1. Таким образом в результате получатся 2 двуплечих рычага (коромысла) 10-11 и 12-13, пересеченные на одной оси 9.
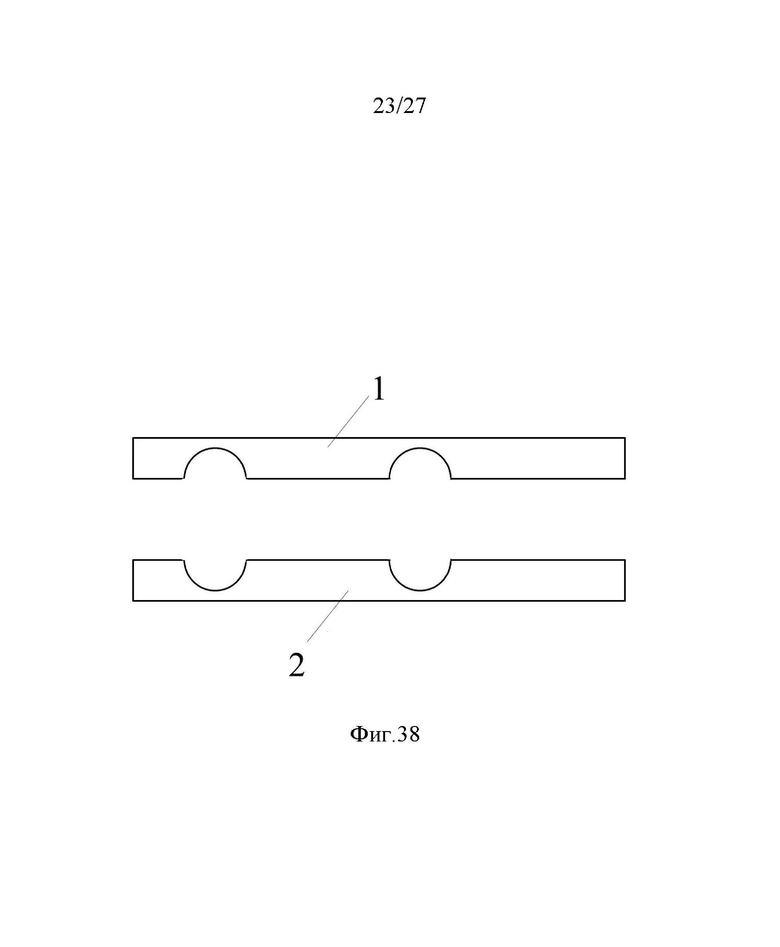
На фиг.38 показана часть рамки, состоящей из двух частей, в вырезы части 2 укладываются клапаны (сделанные, например, из углепластика), сверху накрывается и прикручивается часть 1, на оси клапанов надеваются и прикручиваются к этим частям шайбы с ограничителями, ограничивающие поворот клапанов (см. фиг. 24-26). Эта рамка может крепиться на П образном конце рычага из фиг.39-40.
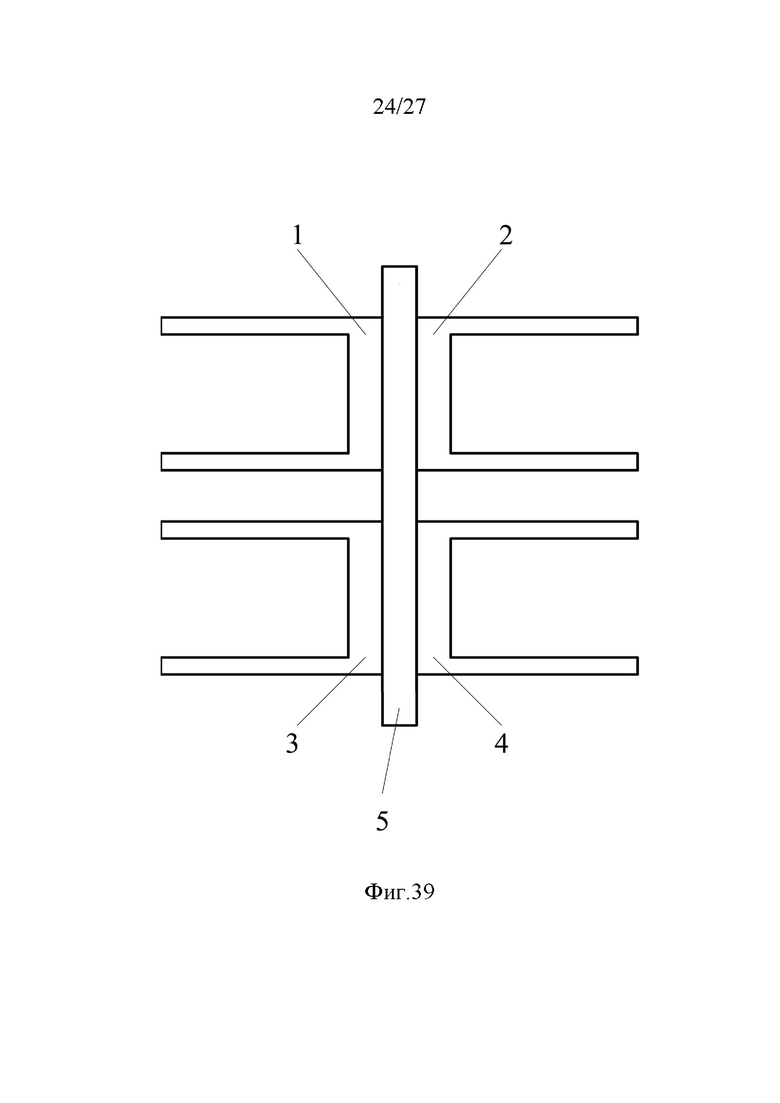
На фиг.39 две пары или 4 одноплечих рычага 1,2,3,4 с П образной формой концов симметрично расположены на оси 5 (друг против друга они располагаются по аналогии с дверными петлями: поочередно удерживаясь за ось (не прорисовано)).
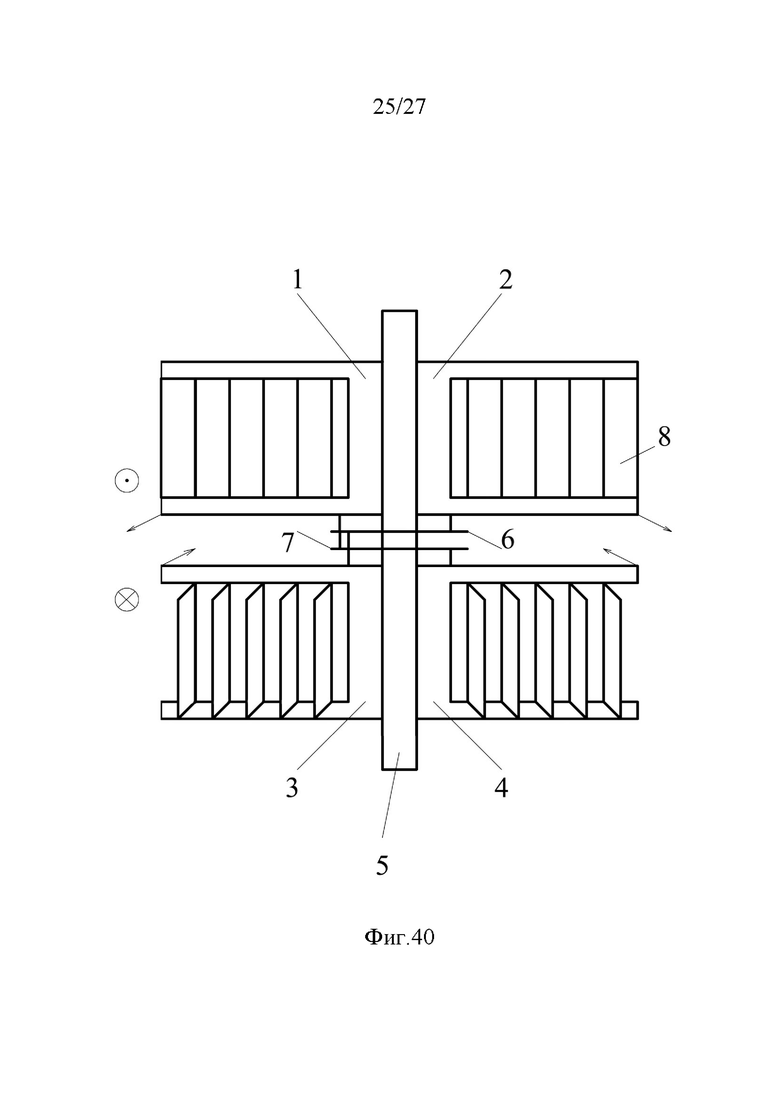
На фиг.40 Вид тягового устройства подобного из фиг.23 сверху (отличается исполнением обходов: на фиг.23 – дугообразные, здесь – пересечение организовано через вырезы в обходах, см. фиг.33-37). 4 одноплечих рычага 1,2,3,4 с П-образной формой концов, симметрично расположенные на оси 5 (как на фиг.39), с помощью обходов 6,7 (см. фиг.33-37) преобразованы в 2 пересекающихся рычага 1-4 и 2-3 на всех концах которых установлены клапаны 8 (см. фиг.24-26, 38). Нижние концы 3,4 с открытыми клапанами отдаляются и пропускают среду сквозь себя, верхние конца 1,2 приближаются с закрытыми клапанами и воздействуют на среду, дойдя до крайних положений, рычаги останавливаются и начинают движение в обратном направлении, давление среды закроет клапаны у нижних концов 3,4, они, приближаясь, будут воздействовать на среду, и откроет клапаны у верхних концов 1,2, они, удаляясь, будут пропускать среду сквозь себя. Т.о. если это устройство закреплено, то оно создает поток, направленный навстречу смотрящему, если устройство установлено на корабль, то оно будет толкать корабль от смотрящего на фиг.
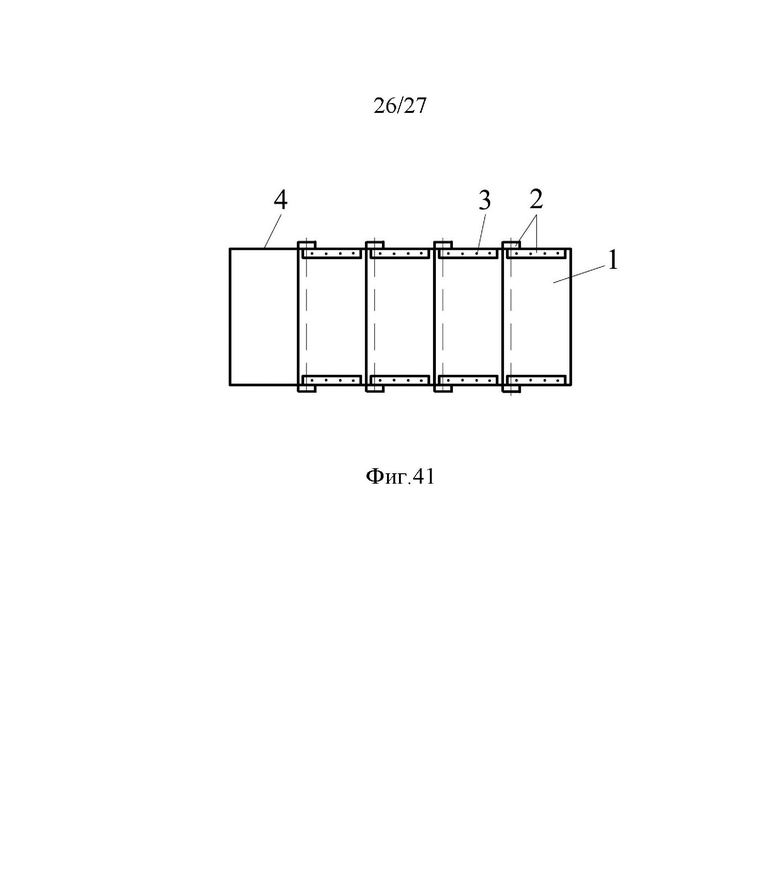
На фиг.41 Клапаны 1, соединенные по торцам с осями 2 винтами 3 и установленных в корпусе П-образного рычага 4 на подшипниках (не нарисовано).
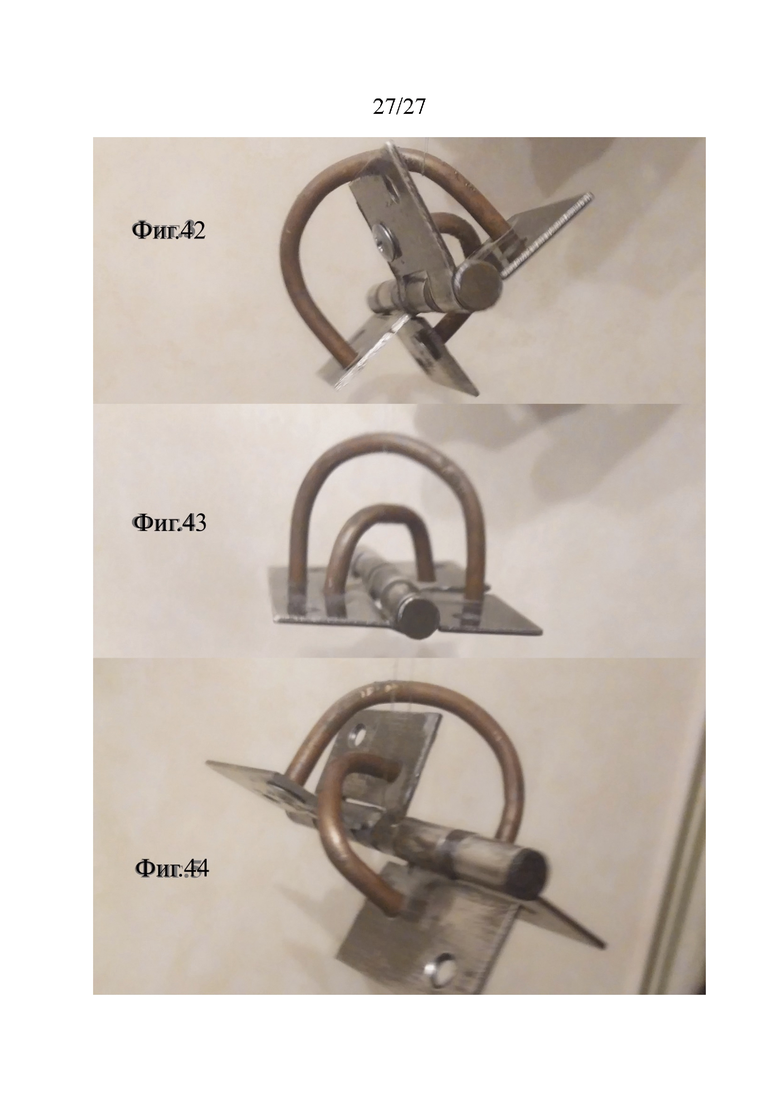
На фиг.42-44 фото РСПРС, сделанного из дверной петли, на фиг.1 ближние концы пересекающихся рычагов подняты, дальние опущены, на фиг.2 все 4 конца расположены в одной плоскости, на фиг.3 ближние концы опущены, дальние подняты (поэтому оно и называется Стрекоза).
Варианты осуществления.
Пересекаться рычаги (скрещиваться обходы) могут самыми разными способами: обходя ось с одной стороны (тогда один из обходов обходит и ось, и другой обход), с разных сторон (один обход обходит ось с одной стороны, а другой – с другой), с обеих сторон по одному или вместе (в этом случае один или оба рычага усиливаются двойными обходами), ось может иметь разрывы ≥ 1 (состоять из фрагментов ≥ 2), тогда один из рычагов может не обходить ось, а проходить в разрыв (между фрагментами). Так же рычаги могут быть не связаны с осью, а может кто-то из них и быть с ней связан (тогда ось превращается в вал).
Если взять 2 петли (у каждой - своя ось) и соединить их таким же образом, получится аналогичная работоспособная конструкция с разрывом в оси, ось может прерываться в районе пересечения, в районе обхвата рычагом оси, в любых других местах и состоять из фрагментов. При наличии разрыва один из рычагов может пройти район пересечения между частями оси, а другой может обойти его с одной или с обеих сторон. n точек скрещивания – 2n+2 конца. Ясно, что для наращивания точек скрещивания наличие разрывов не обязательно.
Возможны различные варианты связи оси с рычагами, либо один рычаг жестко связано с целой осью (ось превращается в вал), либо 2 оси и каждый рычаг жестко связан со своей осью, либо один рычаг жестко связано с осями>2, либо 2 рычага жестко связаны с различными осями (фиг.6-7), либо реализуется комбинация из закрепленных к какому-либо рычагу (одна ось может быть жестко связан лишь с одним рычагом), и свободных осей (например, 2 оси, тогда если одна ось жестко связана с первым рычагом, то у второго рычага напротив этой оси закреплен обхват, в который и вставляется эта ось, другая ось может быть жестко связана со вторым рычагом, тогда у первого рычага напротив этой оси закреплен обхват, т.о. у каждого рычага закреплены по одной оси и по одному обхвату (см. фиг6-7), или если у обоих рычагов только обхваты, то в них возможно вставить не одну ось, а несколько, но тогда возрастает нагрузка на обхваты (если оси стыкуются внутри обхвата) или на обходы (если оси стыкуются в районе пересечения или между обхватами)).
В простейшем случае (фиг.1) угол поворота одного рычага относительно неподвижного другого рычага лежит в районе 180° (при совместном движении по принципу крыльев стрекозы (встречные повороты) углы поворота каждого от упора до упора лежат в районе 90°), далее один рычаг упирается в обход другого (именно поэтому пересекающиеся рычаги являются коромыслами). В зависимости от форм обходов и рычагов, соотношения размеров обходов и рычагов, и расстоянию между рычагами, этот диапазон может варьироваться довольно широко как в одну, так и в другую стороны.
С помощью следующих способов исключения встречи обходов с рычагами возможно значительно увеличить углы поворотов. При наличии разрывов в оси, один из рычагов может проходить район пересечения между частями оси. В этом случае если обход одного рычага будет достаточного размера и конец другого рычага, не упираясь, сможет проходить под ними, то его поворот относительно неподвижного другого рычага может приближаться к 360° (при совместном движении по принципу крыльев стрекозы, т.е. при встречных поворотах, углы поворота каждого могут приближаться к 180°). Описать полный круг в 360одного рычага относительно другого не дают поперечные размеры рычагов.
Этого же результата можно достичь и без разрыва в оси с рычагами с вырезами, в которые и будут проходить обходы. Например, у рычага с меньшим обходом вырез над обходом, у рычага с большим обходом вырез под обходом (фиг.2). Так же возможна комбинация вырезов и обходов на одном рычаге: один конец обхода расположен ближе к оси, и вырез расположен над ним, другой конец обхода расположен дальше от оси, и вырез расположен между ним и осью (фиг.3). Форма, место и размер вырезов могут быть произвольными, и их определяет цель – пропустить обходы для поворотов рычагов до нужного угла.
Этого же результата можно достичь и без вырезов в рычагах, с обходами, которые до оси идут между рычагами, например, Z образной формы, возможность крепить обход на любом удалении от оси (тем самым увеличивая плечо и уменьшая нагрузку в месте крепления обхода), не уменьшая угол поворота рычагов, является еще одним достоинством обходов между рычагами.
Вырезы в обходах, расположенных между рычагами, являются еще одним способом пересечения, который заключается в следующем (фиг.33-37): если на одну ось 9 одно за другим надеть два колеса 1 и 2 (форма колеса взята для конкретности и может быть абсолютно произвольной: овал, сектор, квадрат и т.д.), затем с каждой стороны от колес надеть по два одноплечих рычага 10, 12 с одной стороны, и 11, 13 с другой (дверная петля – как пример пары одноплечих рычагов (коромысел), которые на практике могут иметь абсолютно произвольную форму), диагональные пары рычагов соединяются следующим образом: с колесом 1 рычаг 10 соединяется креплением 3, а рычаг 11 креплением 5, причем крепление 5 проходит через вырез 6 в колесе 2; с колесом 2 рычаг 13 соединяется креплением 4, а рычаг 12 креплением 7, причем крепление 7 проходит через вырез 8 в колесе 1. Возможно обойтись и 1 вырезом, если одно колесо (форма обхода м.б. произвольной) будет меньше другого и не будет мешать движению крепления другого колеса на рабочих углах. Таким образом в результате получатся 2 двуплечих рычага 10-11 и 12-13, пересеченные на одной оси 9, это РСПРС с одной точкой скрещивания, если на ось надеть еще два колеса и два одноплечих рычага, и так же соединить диагональные пары, то получим РСПРС с 2-мя точками скрещивания, и у 2-х рычагов будет уже 6 концов, и т.д. Амплитудные углы поворотов рычагов здесь определяются размерами вырезов. Под обходом подразумевается деталь, соединяющая диагональную пару одноплечих рычагов, после чего она превращаются в двуплечий рычаг (коромысло), т.е. в данном случае это колесо 1 с креплениями 3 и 5, и колесо 2 с креплениями 4 и 7.
Если этого будет требовать задача, то варианты можно скомбинировать.
Заявленная конструкция состоит из 3х элементов: 1 оси и 2-х рычагов, или из 2-х элементов – 2-х рычагов (если ось связана с одним из рычагов), каждый из этих элементов может быть, как цельным, так и составным, например, ось может быть целой или состоять из отдельных фрагментов, каждый двуплечий рычаг (коромысло) может скручиваться, свариваться, склеиваться и т.д. из отдельных частей, либо изготавливаться (например отливаться) цельным, форма этих рычагов может быть произвольной: стержень, пластина, рамка и т.д.. Форма обходов может быть самой разнообразной: треугольной, квадратной, трапециевидной, многоугольной, дугообразной, дискообразной и т.д. Сечение обходов может быть произвольным: для увеличения прочности – швеллерным, для облегчения – пустотелым, и т.д. Материал изготовления так же может быть самый различный: дерево, металлы, сплавы, стекло, пластик, углепластик, стеклопластик и т.д.
Лучший вариант осуществления.
Отвечать на этот вопрос, то же что и выбирать лучший рычаг на Земле. Для каждой конкретной задачи - свой лучший вариант, например, для передачи больших усилий поможет вариант с двойными обходами в форме швеллера. Но вариант с вырезами в обходах, расположенных между рычагами считаю лучшим.
Положительные эффекты и примеры.
После пересечения, концы каждого двуплечего рычага движутся в параллельных плоскостях, а обход вообще движется в пространстве.
Пересекающиеся на 1 оси рычаги могут все тоже, что и простые рычаги на оси, но чуть больше, они одновременно могут делать в 2, 3..., 1000… больше, чем не пересекающиеся.
Рычажные качели из 1 рычага могут качать 2х человек, качели из 2х пересекающихся рычагов могут качать 4, 6, 8… сколько угодно человек (фиг.8).
Скрещенные рычаги используются для создания ножниц, плоскогубцев и т.д. (составные рычаги). 2 пересекающихся рычага тоже могут резать (заточив соседние концы) (фиг.11), сжимать (тиски), прессовать, раскалывать (фиг.9,10), качать нефть, газ, воду (фиг.32), печатать, формовать и т.д., но более 1 операции одновременно. Из-за того, что у 2х пересекающихся рычагов может быть сколько угодно концов, их можно назвать множителем одновременно выполняемых операций и использовать для создания устройств и механизмов, выполняющих несколько операций одновременно.
Само РСПРС своим видом напоминает стрекозу, т.к. оно с помощью всего 2 рычагов реализует принцип работы 4х крыльев стрекозы: встречные повороты 2-х пар крыльев, работающих в противофазе, при поднятии одной пары, другая опускается (фиг.15-16). Если РСПРС замаскировать под стрекозу, где рычаги – это крылья, то получится интересная игрушка, в которой пошевелив одной парой крыльев, другая будет двигаться сама в противофазе (фиг.5).
РСПРС может быть использована для создания устройств максимально эффективно воздействующих на среду. На фиг.23 кривошипно-коромысловый механизм как один из способов преобразования вращательного движения двигателя, подведенного к валу – 6 в колебания рычагов 1 и 2 для махания крыльями или гребли веслами. Здесь РСПРС используется в составе привода для крыльев или весел.
В данном случае сдвоенный кривошип (два кривошипа 7, закрепленные на концах вала 6) связывает два противолежащих конца рычагов 1 и 2, и через шатуны – 8 заставляет их одновременно либо опускаться вниз, либо подниматься вверх, другие два конца движутся так же, но в противофазе первой паре. Все 4 П-образных конца рычагов (коромысел) 1 и 2 (фиг.39-40) соединяются с клапанами (фиг.24-26, 38, 41), после чего они превращаются в крылья или весла жалюзи, которые работают как обратные клапаны: благодаря смещению оси поворота относительно оси симметрии появляется момент, вращающий клапаны 9 (фиг.23) или 8 (фиг.40), ограничители и прямоугольные концы осей клапанов ограничивают их угол поворота (фиг.24-26), при рабочем полупериоде давление среды закрывает клапаны, благодаря чему жалюзи, представляющие из себя сплошные плоскости, воздействуют на среду, а при холостом полупериоде давление среды открывает лопатки, и жалюзи пропускают среду сквозь себя. За период получается 2 рабочих маха: по одному каждой парой крыльев (весел) за каждый полупериод. Махать ими можно не только в воздухе, но в любой среде, а значит таким образом можно не только летать, но и плавать (фиг.27), перекачивать, и т.д., т.е. воздействовать на газообразные и жидкие среды с самыми различными целями: создания направленной тяги, и тогда устройство выступает в качестве движителя, либо направленного потока этой среды для перекачивания, нагнетания, нагревания, охлаждения, отопления, кондиционирования и т.д. Длинной вала – 6 можно регулировать плечо приложения силы, и если длинна вала будет равна длине конца рычага – 1, то махать крыльями будет максимально легко. Максимальная эффективность является следствием того, что только форма плоскости обладает максимальной разностью сопротивлений потоку среды при перпендикулярном и параллельном ориентировании, а у 2-х рычагов из РСПРС этих плоскостей может быть от 4-х до сколько угодно.
Если в устройстве из фиг.23 концы рычагов вместо жалюзи будут соединены с калибровочными сетками или коробами, и уменьшить диаметр кривошипов для уменьшения амплитуды колебания рычагов, то оно превратится в виброустановку и может быть использовано для калибрования семян или щебня.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовая часть грузоподъемного средства | 1981 |
|
SU992395A1 |
| ШАРНИРНЫЙ ВИБРОУДАРНЫЙ МЕХАНИЗМ | 2022 |
|
RU2783900C1 |
| Привод отделительных цилиндров гребнечесальной машины | 1988 |
|
SU1564213A1 |
| РЫЧАЖНЫЙ ШАРНИР (ВАРИАНТЫ) | 2006 |
|
RU2323374C2 |
| Тормоз ведущего колеса веломобиля | 1990 |
|
SU1749107A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТЯЖЕЛЕЕ ВОЗДУХА | 1998 |
|
RU2142388C1 |
| Машина для обмывки вагонных колесных пар | 1982 |
|
SU1043054A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2005 |
|
RU2297974C1 |
| Поворотное устройство | 1983 |
|
SU1110606A1 |
| РЫЧАЖНО-СЕГМЕНТНАЯ ЛЕБЕДКА | 2003 |
|
RU2269484C2 |

Изобретение относится к области рычажных механизмов и способов передачи сил и движения. Способ пересечения рычагов по крайней мере на одной оси или валу в рычажном соединении заключается в попарной связи по крайней мере двух диагональных пар деталей в виде одноплечих рычагов с помощью скрещивающихся криволинейных стержней, обходящих ось или вал с одной, или с разных, или с обеих сторон. Один из стержней может проходить между осями или валами, или с помощью вырезов в двух деталях в виде секторов или колес. При этом эти соединения не препятствуют независимым поворотам получившихся рычагов. Рычажное соединение состоит из пары пересекающихся по крайней мере на одной оси или валу рычагов, имеющих каждый по крайней мере не менее пары плеч. Обеспечивается возможность независимого поворота рычагов. 2 н.п. ф-лы, 44 ил.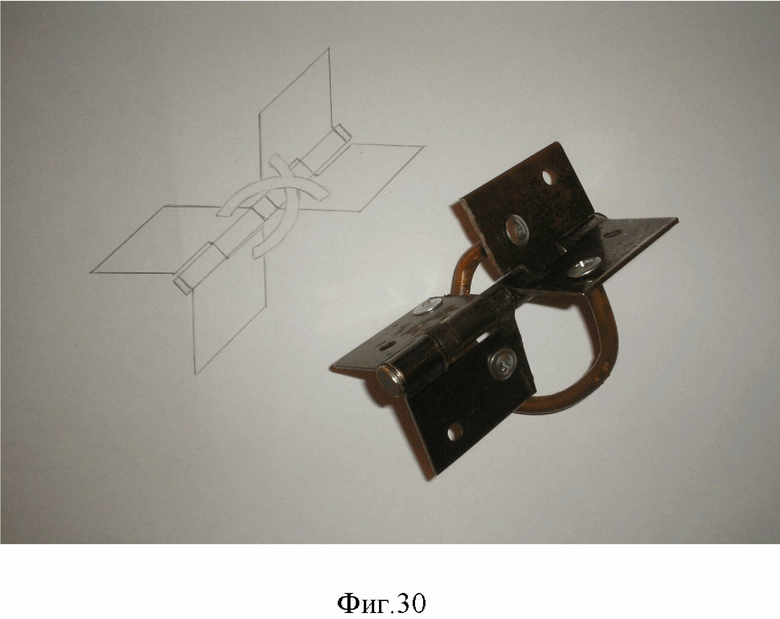
1. Способ пересечения рычагов по крайней мере на одной оси или валу в рычажном соединении Пересекающиеся Рычаги, заключающийся в попарной связи по крайней мере не менее двух диагональных пар деталей в виде одноплечих рычагов с помощью скрещивающихся криволинейных стержней, обходящих ось или вал с одной, или с разных, или с обеих сторон, или один из стержней проходит между осями или валами, или с помощью вырезов в двух деталях в виде секторов или колес, круглых или некруглых, или только в одной детали, если размеры деталей разные, расположенных на оси или валу между пересекающимися рычагами, так что эти соединения не препятствуют независимым поворотам получившихся пересекающихся рычагов.
2. Рычажное соединение Пересекающиеся Рычаги, состоящее из пары пересекающихся по крайней мере на одной оси или валу рычагов, имеющих, каждый, по крайней мере не менее пары плеч и отличающихся от скрещенных на оси рычагов тем, что при переходе через ось или вал меняют свое взаимное расположение.
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2007 |
|
RU2342312C1 |
| ГРУЗОПОДЪЕМНЫЙ СТОЛ | 2008 |
|
RU2361807C1 |
| МАШУЩИЙ ДВИЖИТЕЛЬ | 1993 |
|
RU2089461C1 |
| ДВУХБАРАБАННАЯ ЛЕБЕДКА С ДИСТАНЦИОННЫЛ1 ПЕРЕКЛЮЧЕНИЕМ БАРАБАНОВ | 0 |
|
SU304221A1 |
| ВСЕСОЮЗНАЯ ffVt>&!>&>&!r!~lSH I ilAIcHTtiO"! kASSfV ;S-^v>&ini | 0 |
|
SU374500A1 |
| КАЧЕЛИ | 2015 |
|
RU2600079C1 |

