Изобретение относится к электротехнике, а именно к средствам повышения надежности электроснабжения промышленных предприятий и диагностики состояния изоляции обмоток статоров асинхронных электродвигателей.
Известен способ диагностики технического состояния электродвигателя по его электрическим параметрам, заключающийся в том, что в трех фазах электродвигателя производят непрерывное измерение питающего напряжения и фазного тока. По сигналам мгновенных значений тока и напряжения производят непрерывное вычисление мгновенных значений потребляемых мощностей за период, производят построение спектрограмм потребляемых мощностей. Производят расчет величины потерь энергии в двигателе на каждой из частот спектра. Оценку технического состояния двигателя осуществляют путем сравнения полученных спектрограмм потерь с аналогичными спектрограммами, полученными на заведомо исправном двигателе (см. патент RU №2425391, МПК G01R 31/34, опубл. 27.07.2011).
Недостатком данного способа является высокая погрешность при снижении сопротивления изоляции обмоток двигателя относительно корпуса, не приводящее к значительному небалансу токов, по которому оценивают состояние электродвигателя, а также при возможном влиянии сетевых помех на форму питающего электродвигатель напряжения.
Наиболее близким по технической сущности является способ функциональной диагностики, взятый за прототип, заключающийся в том, что производят измерение полных сопротивлений обмоток статора электродвигателя, а также измерение сопротивления изоляции относительно корпуса асинхронного электродвигателя. Значения сопротивлений обмоток электродвигателя определяют косвенно по действующим значениям фазных токов и напряжений. Величину сопротивления изоляции относительно корпуса электродвигателя оценивают по действующему значению тока утечки на корпус (см. патент RU №2351048, МПК Н02Н 7/08, G01R 31/34, опубл. 27.03.2009).
Недостатком данного способа является высокая погрешность оценки состояния изоляции обмоток относительно корпуса электродвигателя в случае нарушения соединения заземляющего корпус проводника, а также ухудшение электробезопасности для обслуживающего персонала из-за возможности появления опасного потенциала на корпусе электродвигателя.
Технический результат - создание эффективного и надежного способа диагностирования технического состояния асинхронных электродвигателей и обеспечение мер по повышению безопасности их эксплуатации.
Технический результат достигается тем, что способ диагностики асинхронных электродвигателей, заключающийся в измерении мгновенных значений токов в обмотках и напряжений на зажимах электродвигателя, преобразовании их в напряжения, пропорциональные току и напряжению, регистрации полученных сигналов, а также в измерении тока утечки на корпус электродвигателя, отличается тем, что дополнительно производят измерение напряжения на корпусе электродвигателя относительно искусственной нулевой точки, полученной с помощью фильтра напряжения нулевой последовательности, подключенного к зажимам электродвигателя, а сопоставление полных сопротивлений обмоток статора электродвигателя, определенных по полученным данным мгновенных значений токов и напряжений в обмотках, между собой и с полученными на заведомо исправном электродвигателе, производят при номинальной частоте вращения ротора электродвигателя, и, если сопротивления обмоток статора асинхронного электродвигателя ниже допустимого, либо напряжение на корпусе выше допустимого, либо ток утечки превысил допустимую величину, то формируют сигнал на отключение электродвигателя и информационное сообщение.
Сущность изобретения в том, что в устройстве для диагностирования электродвигателя производится измерение действующих значений токов и напряжений статора асинхронного электродвигателя при номинальной частоте вращения электродвигателя, тока утечки на корпус и напряжения на корпусе относительно искусственной нулевой точки, образованной фильтром напряжения нулевой последовательности, подключенным к фазам питающей сети. Значения токов и напряжений статора электродвигателя позволяют рассчитать полное сопротивление обмоток статора и осуществить сравнение этих значений как со значениями, записанными на заведомо исправном электродвигателе, так и сравнение между собой.

где Zст1, Zст2, Zст3 - полные сопротивления обмоток статора электродвигателя;
Uст1, Uст2, Uст3 - фазные напряжения питающей сети;
Iст1, Iст2, Iст3 - фазные токи статора асинхронного электродвигателя.
Сравнение сопротивлений между собой позволит выявить изменение технического состояния одной или двух обмоток, что может быть следствием межвитковых замыканий. Сравнение значений сопротивлений со значениями, записанными на исправном электродвигателе, позволит выявить повреждения распределенного характера, такие как увлажнение изоляции или износ, которые характеризуются общим снижением сопротивления. Сравнение тока утечки с обмоток статора на корпус электродвигателя с уставкой позволит на ранней стадии выявлять и отслеживать скорость развития однофазных замыканий на корпус, а одновременный контроль напряжения между корпусом электродвигателя и искусственной нулевой точкой фильтра напряжения нулевой последовательности позволит контролировать целостность соединений проводника заземления корпуса электродвигателя, при нарушении которых ток утечки может отсутствовать или иметь сильно сниженную величину, что приводит к неверным выводам о состоянии изоляции и подвергает обслуживающий персонал опасности поражения электрическим током.
На фиг.1 представлена блочная схема устройства.
Блочная схема содержит электромагнитный контактор 1, первый микроконтроллер 2, аналого-цифровой преобразователь первого микроконтроллера 3, трехфазный преобразователь тока в напряжение 4, трехфазный делитель напряжения 5, фильтр напряжения нулевой последовательности 6, однофазный делитель напряжения 7, усилитель 8, аналого-цифровой преобразователь второго микроконтроллера 9, второй микроконтроллер 10, датчик частоты вращения 11, трехфазный асинхронный электродвигатель 12, трансформаторы тока 13, 14, 15, 16, жидкокристаллический дисплей 17, кнопочную клавиатуру 18.
К фазам трехфазного асинхронного электродвигателя подключают трехфазный делитель напряжения 5, фильтр напряжения нулевой последовательности 6 и трехфазный преобразователь тока в напряжение 4, получающий токи от трех трансформаторов тока 13, 14, 15. Преобразователь 4 и делитель 5 подают преобразованный сигнал аналого-цифровому преобразователю 3, имеющему с преобразователем 4 и делителем 5 общую нулевую точку, аналого-цифровой преобразователь 3 связан с первым микроконтроллером 2, который имеет возможность отключить контактор, разомкнув цепь питания катушки контактора. Фильтр напряжения нулевой последовательности 6 связан с однофазным делителем напряжения 7, который соединен с корпусом асинхронного электродвигателя. От однофазного делителя напряжения 7 преобразованное напряжение поступает на первый вход аналого-цифрового преобразователя 9, тогда как на второй вход поступает измеренный ток утечки Iут, который снимается с трансформатора тока 16 и усиливается в усилителе 8. Аналого-цифровой преобразователь 9 соединен со вторым микроконтроллером 10, на который также поступает сигнал и от датчика частоты вращения 11. Второй микроконтроллер 10 соединен с первым микроконтроллером 2. Первый микроконтроллер 2 соединен с кнопочной клавиатурой 18, жидкокристаллическим дисплеем 17 и катушкой управления электромагнитного контактора 1.
Работает устройство следующим образом.
Перед запуском электродвигателя необходимо ввести в первый микроконтроллер 2 значения номинальной частоты вращения ротора электродвигателя и уставки на отключение электромагнитного контактора 1 с помощью кнопочной клавиатуры 18 и жидкокристаллического дисплея 17.
После запуска асинхронного электродвигателя 12 электромагнитным контактором 1, аналого-цифровой преобразователь 3 получает измеренные и преобразованные сигналы от преобразователя 4 (получающего сигналы от трансформаторов тока 13, 14, 15) и делителя 5, полученные данные аналого-цифровой преобразователь 3 преобразует в цифровой вид и передает первому микроконтроллеру 2, который, при частоте вращения ротора электродвигателя равной номинальной (данные о частоте вращения поступают в первый микроконтроллер 2 от второго микроконтроллера 10), осуществляет вычисление согласно формуле 1 полных сопротивлений обмоток статора асинхронного электродвигателя 12.
Трансформатор тока 16 подает измеренный сигнал, пропорциональный току утечки на корпус электродвигателя 2, в усилитель 8, далее усиленный сигнал поступает на измерительный вход аналого-цифрового преобразователя 9, который, в свою очередь, принимает сигнал и от делителя 7, на вход которого поступают данные о напряжении между корпусом асинхронного электродвигателя и фильтром напряжения нулевой последовательности 6. Полученные сигналы аналого-цифровой преобразователь 9 преобразует из аналогового в цифровой вид и передает второму микроконтроллеру 10, который также получает данные о частоте вращения ротора электродвигателя от датчика 11. Второй микроконтроллер 10 по связи с первым микроконтроллером 2 передает данные о частоте вращения ротора электродвигателя, о величине тока утечки на корпус и напряжении на корпусе электродвигателя относительно фильтра напряжения нулевой последовательности 6.
Далее первый микроконтроллер 2 сравнивает значения полных сопротивлений обмоток асинхронного электродвигателя со значениями, записанными на заведомо исправном электродвигателе при номинальной частоте вращения, и сравнивает сопротивления между собой. В случае равномерного снижения полных сопротивлений обмоток статора асинхронного электродвигателя 12 ниже уставок выдается сигнал на отключение электромагнитного контактора 1, а на дисплей 17 выводится сообщение об общем снижении полных сопротивлений. Если при сравнении полных сопротивлений между собой выявился недопустимый небаланс (превышающий уставку, заданную перед началом работы), то первый микроконтроллер 2 выдает сигнал на отключение электромагнитного контактора 1, а на дисплей 17 выводится сообщение о возникновении межвитковых замыканий в одной из обмоток статора асинхронного электродвигателя 12. На следующем этапе первый микроконтроллер 2 сравнивает значение тока утечки на корпус электродвигателя с уставкой, введенной перед началом работы. В случае превышения током утечки допустимой величины, первый микроконтроллер 2 подает сигнал на отключение электромагнитного контактора 1, а на дисплей 17 выводится сообщение о снижении сопротивления изоляции обмотки статора относительно корпуса. После этого и в случае удовлетворительной величины тока утечки первый микроконтроллер 2 сравнивает с уставкой величину напряжения на корпусе электродвигателя 12 относительно искусственной нулевой точки 6, (которая была ему передана от второго микроконтроллера 10 вместе с данными о токе утечки и частоте вращения). Наличие напряжения, величина которого превысила уставку, может свидетельствовать об ухудшении соединений в цепи защитного проводника, вплоть до обрыва соединения корпуса асинхронного электродвигателя 12 с защитным проводником. В таком случае результаты замера сопротивления тока утечки трансформатором тока 16 не стоит считать правдоподобными, кроме того, потенциал на корпусе может быть опасен для обслуживающего персонала, поэтому первый микроконтроллер 2 формирует сигнал на отключение электромагнитного контактора 1, а на дисплей 17 выводит сообщение о наличии опасного потенциала на корпусе электродвигателя.
Вся цепочка измерений и сравнений проводится с определенной периодичностью во время работы электродвигателя на номинальной частоте вращения. Сравнение с уставкой тока утечки и потенциала на корпусе электродвигателя допустимо проводить и не при номинальной частоте вращения ротора электродвигателя. Микроконтроллер 2 выдает сигналы о состоянии изоляции в виде сообщений на дисплей после каждого замера и сравнения.
Предложенный способ позволяет диагностировать состояние изоляции обмоток статора асинхронного электродвигателя с высокой точностью и достоверностью, а также осуществлять контроль целостности защитного проводника заземления корпуса электродвигателя, что повышает уровень безопасности обслуживающего персонала.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ИЗОЛЯЦИИ ОБМОТОК СТАТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2615021C1 |
| СПОСОБ ФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2351048C1 |
| СПОСОБ ДИАГНОСТИКИ МЕЖВИТКОВЫХ ЗАМЫКАНИЙ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2529596C1 |
| Способ диагностики асинхронного электродвигателя на основе нейросетевого анализа | 2024 |
|
RU2831697C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВРАЩЕНИЯ ПОГРУЖНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2011 |
|
RU2463612C1 |
| СПОСОБ ДИАГНОСТИКИ МЕЖВИТКОВЫХ ЗАМЫКАНИЙ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2537518C2 |
| Устройство для тепловой защиты погружного электродвигателя | 1990 |
|
SU1741219A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗНОГО НАПРЯЖЕНИЯ, ПОВЕРХНОСТНОГО СОПРОТИВЛЕНИЯ И ТОКА УТЕЧКИ ЛИНЕЙНОГО ПОДВЕСНОГО ИЗОЛЯТОРА ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2578726C1 |
| СТАНЦИЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2001 |
|
RU2221325C2 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
Изобретение относится к области диагностики межвитковых замыканий и снижения сопротивления обмотки статора асинхронного электродвигателя относительно корпуса в сетях с глухозаземленной нейтралью. Способ заключается в измерении полных сопротивлений обмоток статора электродвигателя при номинальной частоте вращения ротора электродвигателя, а также в измерении тока утечки на корпус асинхронного электродвигателя совместно с измерением напряжения на корпусе электродвигателя относительно искусственной нулевой точки, образованной подключением фильтра напряжения нулевой последовательности к фазам питающей сети. Измерения сопротивлений производятся косвенным путем при помощи действующих значений токов и напряжений на обмотках статора электродвигателя. Измерение частоты вращения ротора электродвигателя производится с помощью датчика частоты вращения. Технический результат заключается в диагностировании межвитковых повреждений и снижения сопротивления изоляции относительно корпуса электродвигателя на ранней стадии развития, а также осуществления контроля целостности защитного проводника РЕ в системах TN-S, TN-C-S, или совмещенного нулевого защитного и нулевого рабочего проводников PEN в системе TN-C, или РЕ проводника в системе заземления ТТ. 1 ил.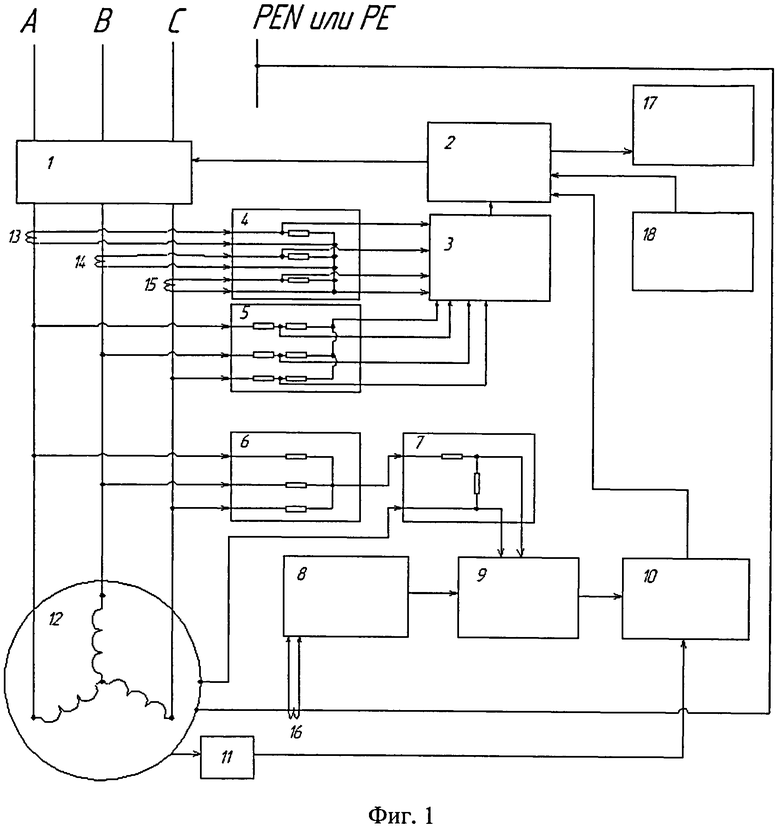
Способ диагностики асинхронных электродвигателей, заключающийся в измерении мгновенных значений токов в обмотках и напряжений на зажимах электродвигателя, преобразовании их в напряжения, пропорциональные току и напряжению, регистрации полученных сигналов, а также в измерении тока утечки на корпус электродвигателя, отличающийся тем, что дополнительно производят измерение напряжения на корпусе электродвигателя относительно искусственной нулевой точки, полученной с помощью фильтра напряжения нулевой последовательности, подключенного к зажимам электродвигателя, а сопоставление полных сопротивлений обмоток статора электродвигателя, определенных по полученным данным мгновенных значений токов и напряжений в обмотках, между собой и с полученными на заведомо исправном электродвигателе, производят при номинальной частоте вращения ротора электродвигателя, и, если сопротивления обмоток статора асинхронного электродвигателя ниже допустимого, либо напряжение на корпусе выше допустимого, либо ток утечки превысил допустимую величину, то формируют сигнал на отключение электродвигателя и информационное сообщение.
| СПОСОБ ФУНКЦИОНАЛЬНОЙ ДИАГНОСТИКИ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2008 |
|
RU2351048C1 |
| US 2010194324 A1 05.08.2010 | |||
| US 6636823 B1 21.10.2003 | |||
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПО ЕГО ЭЛЕКТРИЧЕСКИМ ПАРАМЕТРАМ | 2009 |
|
RU2425391C1 |
| Пика Коноваловых для ударных инструментов | 1959 |
|
SU126844A1 |

