Изобретение относится к области электротехники и предназначено для использования в системах электропривода с асинхронными двигателями с короткозамкнутым ротором для механизмов с циклическими режимами и динамическими нагрузками крано-манипуляторных установок (далее по тексту КМУ) мобильных транспортных средств, как военной техники, так и гражданской техники, перемещающих ответственные грузы. Изобретение также может быть использовано в системах управления электроприводами общепромышленного и специального применения.
Двигатель асинхронный тяговый (RU 184734), как исполнительный электродвигатель в заявляемой системе ЧРАП КМУ (далее по тексту равнозначные понятия СУ или Система ЧРАП в зависимости от контекста), управляется контроллером силовым посредством прикладного программного обеспечения «Апрель-КС1» (Свидетельство о госрегистрации программы для ЭВМ №2016617322) или его модифицированными версиями.
Заявляемая СУ ЧРАП КМУ может эксплуатироваться в условиях вибро- и термодинамических перегрузок, а также при воздействии различных физических, климатических факторов и выдержала испытания на соответствие специальным требованиям ГОСТ РВ применительно к надежности работы в вышеуказанных условиях.
На практике известны электроприводы грузоподъемных механизмов с асинхронными двигателями с фазным ротором, с двигателями постоянного тока. Наряду с вышеуказанными также применяются электроприводы грузоподъемных механизмов с асинхронными двигателями с короткозамкнутым ротором.
Известна система электропривода механизма подъема груза с наименованием «Крановый электропривод механизма подъема груза» (Изобретение RU 2345945, дата приоритета 15.10.2007, дата публикации 10.02.2009, МПК В66С 13/22, Н02Р 3/24), содержащая «...асинхронный электродвигатель с фазным ротором, который соединен с импульсно-ключевым регулятором, электродвигатель гидротолкателя, соединенный с контактором подключения гидротолкателя к электросети, соединенные с электросетью первый контактор направления электротока на подъем груза и второй контактор направления электротока на спуск груза, которые соединены с линейным контактором, подключенным к асинхронному электродвигателю, временно или постоянно включенный в цепь электропривода трансформатор, который электрически соединен с кольцами ротора электродвигателя гидротолкателя через контактор подключения гидротолкателя к трансформатору, который электрически линией связи соединен с асинхронным электродвигателем таким образом, что соединения указанной линии связи расположены между импульсно-ключевым регулятором и асинхронным электродвигателем, причем электродвигатель гидротолкателя соединен с зажимами статора асинхронного электродвигателя посредством контактора подключения электродвигателя гидротолкателя к сети, а посредством контактора подключения электродвигателя гидротолкателя к кольцам ротора асинхронного электродвигателя электродвигатель гидротолкателя соединен с зажимами ротора асинхронного электродвигателя.». Недостатком решения в данной системе электропривода является использование асинхронного двигателя с фазным ротором, который включает щеточно-контактный узел, что в силу «сухого» трения примыкающих к ротору деталей узла при существенных токовых нагрузках существенно снижает надежность всего самого механизма и электропривода в целом. Регулирование частоты вращения ротора определяется комплектом пускотормозных резисторов (переключение ступеней сопротивлений), подключаемых к цепи ротора, при таком варианте ограничивается плавность регулирования и происходит интенсивный износ механического оборудования [стр. 232, 1] - Браславский И.Я., Ишматов З.Ш., В.Н. Поляков. Энергосберегающий асинхронный электропривод: Учеб. пособие для студ. высш. учеб. заведений. - Под ред. И.Я. Браславского. - М.: Издательский центр «Академия», 2004. - 256 с.
Известен электропривод переменного тока на основе трехфазного инвертора и асинхронного двигателя с короткозамкнутым ротором (Изобретение RU 2396696, дата приоритета 29.07.2008, дата публикации 10.02.2010, МПК Н02Р 27/04, Н02Р 27/06). В электроприводе переменного тока введен адаптивный регулятор коррекции тока намагничивания, который формирует вектор тока намагничивания путем формирования мгновенных значений, амплитуда и частота которых зависит от задания на ток намагничивания. Путем изменения частоты достигается формирование оптимального, с точки зрения минимизации потребления, тока статора, угла между векторами тока статора и тока намагничивания, равного 45°. Недостатком этого технического решения является использование в электроприводе датчика скорости, что усложняет систему управления электропривода в целом, снижает в определенной степени надежность и также сужает область промышленного применения (при воздействии на электрооборудование комплекса физико-химических и климатических факторов широкого диапазона, например, в условиях ограниченного, термонагруженного пространства с вибро-, тепловыделяющим оборудованием).
Известен электропривод манипулятора (Изобретение RU 2443543, дата приоритета 09.11.2010, дата публикации 27.02.2012, МПК B25J 9/16), содержащий усилитель и электродвигатель, сумматоры, блоки умножения, датчики скорости, редуктор - с шестерней для приведения в движение рейки, закрепленной неподвижно на горизонтальном звене манипулятора, движок первого датчика положения, релейный блок, датчик скорости, задатчики сигнала, датчик массы, датчик положения, квадратор, синусный функциональный преобразователь, косинусный функциональный преобразователь, датчик ускорения и дифференциаторы. Недостатком данного электропривода манипулятора является сложная структура системы электропривода и использование датчика скорости.
Наиболее близким техническим решением к заявляемому изобретению (прототипом) является энергосберегающая система управления асинхронным электроприводом (Изобретение RU 2498496, дата приоритета 19.06.2012, дата публикации 10.11.2013, МПК Н02Р 21/08, Н02Р 23/08, Н02Р 27/08), состоящая из блока ввода заданной частоты вращения асинхронного двигателя, регулятора напряжения, блока драйверов, который своими выходными выводами соединен с входными управляющими выводами автономного инвертора напряжения, который соединен с обмотками асинхронного двигателя, снабжен вычислителем проекций вектора тока статора, вычислителем активного тока статора, умножителями, согласующим усилителем, фильтром, интегратором, вычислителями синуса и косинуса угла поворота вектора напряжения, блоком переключений режимов работы электропривода, блоком широтно-импульсной модуляции и датчиками тока, при этом выходные сигнальные выводы датчиков тока соединены с выходными выводами вычислителя проекций вектора тока статора, который выходными выводами соединен с первым и третьим входным выводом вычислителя активного тока статора, а второй и четвертый входной вывод вычислителя активного тока статора соединен с выходными выводами умножителей, при этом выходной вывод вычислителя активного тока статора соединен со вторым входным выводом умножителем, второй входной вывод которого соединен с выходным выводам блока ввода заданной частоты, а выходной вывод умножителя соединен с входным выводом согласующего усилителя, который своим выходным выводом соединен с входным выводом фильтра, при этом выходной вывод фильтра соединен со вторым входным выводом блока переключения режимов работы электропривода, первые входные выводы умножителей и соединены с выходными выводами вычислителей синуса и косинуса угла поворота вектора напряжения, соответственно, входные выводы которых соединены с выходным выводом интегратора, вторые входные выводы умножителей и соединены с выходным выводом фильтра, интегратор входным выводом соединен с выходным выводом блока ввода заданной частоты, а первый входной вывод блока переключений режимов работы электропривода соединен с выходным выводом регулятора напряжения, входной вывод которого соединен с выходным выводом блока ввода заданной частоты, при этом блок широтно-импульсной модуляции первым и вторым входным выводом соединен с выходным выводом блока переключений режимов работы электропривода и блоком ввода заданной частоты, а выходные выводы блока широтно-импульсной модуляции соединены с входными выводами блока драйверов. Недостатками прототипа являются:
- сложная структура, большое количество зависимых параметров, что влечет сложность в настройке и к снижению надежности;
- использование общепромышленного асинхронного электродвигателя в приводе грузоподъемной установки, при том, что в таких механизмах предпочтительным является применение двигателя асинхронного тягового типа (т.к. тяговые электродвигатели имеют преимущество по моменту и перегрузочной способности, т.е. по надежности в эксплуатации);
- повышенные электрические потери ввиду питания асинхронного электродвигателя от преобразователя частоты (т.е. от выпрямителя, звена постоянного тока и автономного инвертора напряжения) на всем диапазоне регулирования скорости.
Приведенные недостатки способствуют снижению работоспособности, т.е. надежности и повышенным электрическим потерям в системе асинхронного электропривода.
Технической проблемой, не решаемой прототипом, и, одновременно, отличительным признаком заявляемого изобретения, является создание системы частотно-регулируемого асинхронного электропривода с повышенными характеристиками надежности с одновременным снижением электрических потерь.
Технической задачей, решаемой заявляемым изобретением, является повышение надежности, работоспособности и обеспечение энергосберегающего управления ЧРАП по управлению работой крано-манипуляторных установок мобильных транспортных средств, как военной техники, так и гражданской техники при работе с ответственными грузами высокой степени опасности, при эксплуатации электрооборудования системы ЧРАП в условиях вибро- и термо-динамически нагруженных процессов, а также широкого диапазона воздействия различных физических, климатических факторов на электрооборудование и соответствия его (электрооборудования) при этом требованиям ГОСТ РВ.
Техническим результатом, достигаемым заявляемым изобретением, является повышение надежности, выражающееся в снижении количества отказов элементов системы ЧРАП крано-манипуляторной установки, а также в снижении электрических потерь.
С учетом специфики применения, как в составе гражданской техники, так и в составе военной техники, в системе управления ЧРАП предъявляются и были реализованы повышенные требования (согласно комплексам государственных военных стандартов «Климат-6» и «Мороз-7»).
В качестве электродвигателя в описываемой системе используется двигатель асинхронный тяговый ДАТ с параметрами питающего напряжения, соответствующими UsN/UN=127/220 В с частотой ƒN=400 Гц. Также для энергосберегающего управления ЧРАП реализована возможность переключения питания в номинальном режиме работы двигателя асинхронного тягового на питание напрямую, непосредственно к питающей электросети.
Дополнительным преимуществом СУ ЧРАП является то, что в устройстве контроллера силового отсутствует «традиционная» система принудительного охлаждения чувствительных к перегреву электронных компонентов, а используется корпус-радиатор из алюминиевого сплава с расчетно-подобранной теплопроводностью металла корпуса, имеющий в объемном сечении геометрический профиль, обеспечивающий оптимальное распределение/отвод возникающих тепловых потоков в замкнутом пространстве корпуса контроллера силового (включая случаи размещения корпуса-радиатора в термонагруженных отсеках мобильной техники).
Следует уточнить, что в прототипе (Изобретение RU 2498496) система работает с асинхронным электродвигателем с короткозамкнутым ротором 4A250S4Y3 с номинальной частотой напряжения питания, равной ƒN=50 Гц. Заявляемая же система ЧРАП работает с двигателем асинхронным тяговым, имеющим требуемые параметры питающего напряжения, т.е. с номинальным фазным/линейным напряжением питания, равным UsN/UN = 127/220 Вис частотой ƒN=400 Гц, что обусловливает расширение специфики надежного применения (вплоть до применения т.ч. в объектах военной техники).
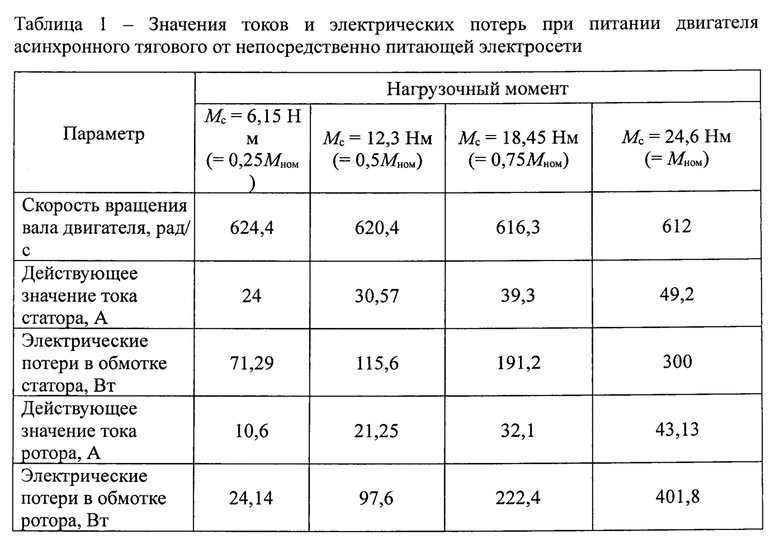
Для понимания и пояснения энергосберегающего управления в системе ЧРАП необходимо все-таки отметить некоторые возникающие неблагоприятные особенности: так при питании двигателя асинхронного тягового от источника импульсного широтно-модулированного напряжения происходит естественное увеличение потерь мощности, связанное с наличием высших гармоник в прикладываемом к обмоткам статора напряжении, с фактором падения напряжения на силовых полупроводниковых ключах преобразователя частоты (ПЧ) и со снижением напряжения на электродвигателе, обусловленного использованием широтно-импульсной модуляции (ШИМ). При этом наибольший эффект от снижения потерь в ЧРАП в номинальном режиме работы возможен при питании двигателя асинхронного тягового (ДАТ) от источника синусоидального напряжения (от питающей электросети). Для минимизации указанных неблагоприятных особенностей в заявляемой системе ЧРАП в целях надежности была реализована модернизированная схема подключения ДАТ с ПЧ к питающей электросети с использованием «байпаса», т.е. предусмотрена возможность переключения питания ДАТ с источника импульсного широтно-модулированного напряжения на источник синусоидального напряжения (непосредственно к питающей электросети). Для пояснения в таблицах 1 и 2 приведены результаты математического моделирования по значениям токов и электрических потерь при питании двигателя асинхронного тягового от непосредственно питающей электросети и от ПЧ со скалярной системой управления.
Перечень изображений, раскрывающих сущность заявляемого изобретения:
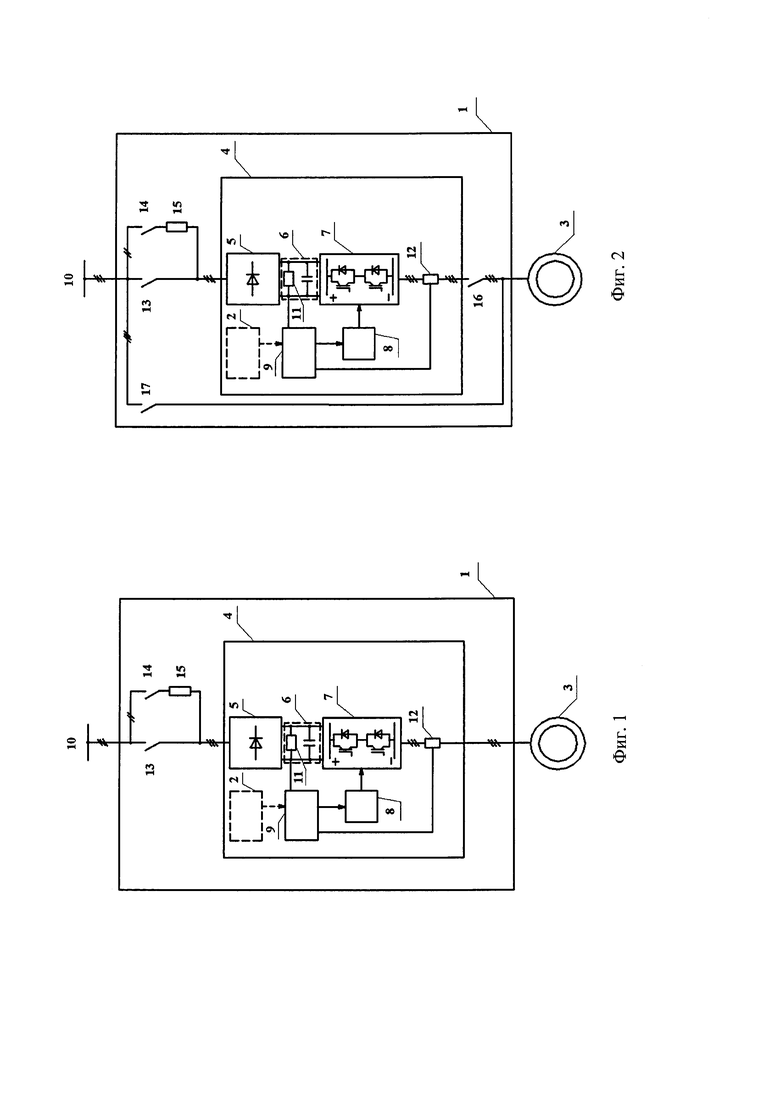
Фиг. 1 - Заявляемая система частотно-регулируемого асинхронного электропривода (Система ЧРАП) КМУ без возможности переключения в номинальном режиме работы двигателя асинхронного тягового через контроллер силовой на питание напрямую к непосредственно питающей электросети;
Фиг. 2 - Заявляемая система частотно-регулируемого асинхронного электропривода (Система ЧРАП) КМУ с возможностью переключения в номинальном режиме работы двигателя асинхронного тягового через контроллер силовой на питание напрямую (непосредственно к питающей электросети с применением дублирующей (обходной) схемы питания).
Механизм практической реализации заявляемого изобретения выполняется следующим образом:
1. Система частотно-регулируемого асинхронного электропривода (система ЧРАП) крано-манипуляторной установки (КМУ), содержащая контроллер силовой (1), прикладное программное обеспечение «Апрель-КС1» (2) и двигатель асинхронный тяговый - ДАТ (3). Данный контроллер включает в себя двухзвенный преобразователь частоты - ПЧ (4). В свою очередь, указанный ПЧ состоит из трехфазного мостового выпрямителя (5), промежуточного звена постоянного тока (6), автономного инвертора напряжения - АИН (7), платы драйверов (8) и платы управления (9).
Указанная система ЧРАП имеет следующие дополнительные особенности. Трехфазный мостовой выпрямитель (5) реализован на неуправляемых силовых выпрямительных вентилях. Плата драйверов (8), необходимая для работы с транзисторами АИН, обеспечивает заданную частоту переключения данных транзисторов. Плата управления (9), совместимая с прикладным программным обеспечением «Апрель-КС1» (2), необходима для управления транзисторами АИН, а также для контроля и защиты ПЧ.
Система ЧРАП КМУ характеризуется тем, что в контроллере силовом для энергосберегающего управления и повышения работоспособности/надежности системы управления ЧРАП реализована возможность переключения питания в номинальном режиме работы ДАТ через контроллер силовой на питание напрямую (непосредственно к питающей электросети с применением дублирующей (обходной) схемы питания, так называемого «байпаса»). «Традиционная» же схема подключения, представленная на фиг. 1, не предусматривает возможности подключения ДАТ (3) напрямую к питающей электросети (10).
На схеме также условно изображены плата датчика напряжения (11) для измерения напряжения в звене постоянного тока, плата датчиков тока (12) для измерения токов на выходе АИН и контакторы -(13) и (14) без соответствующих управляющих обмоток. После подачи питания на ПЧ (4) контроллер силовой - КС (1) подает команду замыкания на контактор (14), чтобы произвести предзаряд батареи конденсаторов посредством токоограничивающего резистора (15). После этого контактор (14) размыкается, а контактор (13) замыкается, тем самым, подключая ПЧ (4) к питающей электросети (10).
Один из возможных вариантов принципиальной схемы подключения ПЧ (4) с ДАТ (3) к питающей электросети (10) с возможностью переключения источника напряжения, питающего электродвигатель (ДАТ), представлен на фиг. 2. В сравнении с «традиционной» данная схема подключения ПЧ (4) с ДАТ (3) к питающей электросети (10) дополняется двумя трехфазными контакторами (16) и (17), которые производят переключение источника напряжения, питающего электродвигатель (ДАТ), с импульсного широтно-модулированного напряжения на синусоидальное согласно и в зависимости от состояния управляющего сигнала.
В итоге обходная (дублирующая) схема питания, называемая «байпасом»:
а) обеспечивает при ее работе энергосбережение посредством снижения действующих значений токов и электрических потерь в обмотках статора и ротора (см. обосновывающие данные таблиц 1 и 2);
б) позволяет наряду с обеспечением энергосбережения в системе ЧРАП повысить ее надежность, так как работоспособность указанного привода при выходе из строя ПЧ обеспечивается применением дублирующе-обходной схемы питания.
2. Система ЧРАП характеризуется тем, что в контроллере силовом используется скалярная СУ с заложенным прикладным программным обеспечением (Свидетельство о госрегистрации программы на ЭВМ №2016617322) или его модифицированными версиями для управления электродвигателем ДАТ. В системе ЧРАП со скалярной системой управления основными управляемыми переменными состояния электропривода являются модуль вектора напряжений на зажимах обмотки статора -  и угловая частота -
и угловая частота -  вращения этого вектора относительно статора. Практически реализован закон пропорционального управления U/ƒ, в соответствии с которым амплитуда напряжения пропорциональна частоте с некоторым увеличением в области малых частот (для компенсации падения напряжения на активном сопротивлении статора). Для формирования напряжений на зажимах статора электродвигателя используется принцип широтно-импульсной модуляции выходного напряжения выпрямителя, реализуемый автономным инвертором напряжения. Таким образом, это повышает надежность системы ЧРАП, т.к. применяется быстродействующая отсечка по току статора, обеспечивающая эффективное токоограничение в режимах пуска, торможения и изменения нагрузки на валу ДАТ, включая стопорение;
вращения этого вектора относительно статора. Практически реализован закон пропорционального управления U/ƒ, в соответствии с которым амплитуда напряжения пропорциональна частоте с некоторым увеличением в области малых частот (для компенсации падения напряжения на активном сопротивлении статора). Для формирования напряжений на зажимах статора электродвигателя используется принцип широтно-импульсной модуляции выходного напряжения выпрямителя, реализуемый автономным инвертором напряжения. Таким образом, это повышает надежность системы ЧРАП, т.к. применяется быстродействующая отсечка по току статора, обеспечивающая эффективное токоограничение в режимах пуска, торможения и изменения нагрузки на валу ДАТ, включая стопорение;
3. Система ЧРАП характеризуется тем, что в качестве электродвигателя используется двигатель асинхронный тяговый с параметрами «специализированного» питающего напряжения с номинальным фазным/линейным напряжением питания, равным UsN/UN = 127/220 В с частотой ƒN=400 Гц, обусловленного спецификой применения (в том числе для военной/гражданской техники), к которой предъявляются заведомо повышенные требования к надежности;
4. Система ЧРАП характеризуется тем, что в контроллере силовом, в силу требований к компактности, вместо «традиционных» систем принудительного охлаждения чувствительных к перегреву электронных компонентов используется корпус-радиатор из алюминиевого сплава с расчетно-подобранной теплопроводностью металла корпуса, что обеспечивает надежность системы ЧРАП при ее работе в тяжелых вибро-, термонагруженных условиях;
5. Система ЧРАП характеризуется тем, что в контроллере силовом применяется, в силу требований к компактности, корпус-радиатор из алюминиевого сплава, имеющий в сечении геометрический профиль, обеспечивающий оптимальное распределение/отвод возникающих тепловых потоков в замкнутом пространстве корпуса контроллера силового с возможностью, таким образом, по совокупности вышеуказанных пунктов обеспечить надежную работу контроллера силового по управлению ДАТ в системе ЧРАП мобильной техники военного и гражданского назначения (включая КМУ для точного перемещения грузов высокой степени опасности) в качестве устройства, управляющего работой двигателя асинхронного тягового в условиях термо- и динамических перегрузок и широкого диапазона воздействия различных физико-химических, климатических факторов на электрооборудование и соответствия его (электрооборудования) при этом специальным требованиям ГОСТ РВ.
В динамике работы системы ЧРАП алгоритм переключения источника, питающего ДАТ с импульсного широтно-модулированного напряжения на синусоидальное и обратно при реализации режимов разгона и торможения электродвигателя, следующий:
В начальном состоянии в звене постоянного тока (6) преобразователя частоты (4) - нулевое напряжение. После подачи питания на ПЧ контроллер силовой (КС) подает команду замыкания на контактор (14), чтобы произвести предзаряд батареи конденсаторов посредством токоограничивающего резистора (15). После этого (т.е. предзаряда батареи конденсаторов) контактор (14) размыкается, а контактор (13) замыкается, тем самым подключая ПЧ (4) к питающей электросети (10). В таком состоянии производится разгон ДАТ (3) до номинальной частоты с заданным темпом. По достижению ДАТ (3) номинальной частоты производится размыкание контактора (16) и замыкание контактора (17). После этого ДАТ (3) работает при питании от источника синусоидального напряжения (питающей электросети).
Перед режимом электрического торможения размыкается контактор (17) и замыкается контактор (16). Далее производится торможение ДАТ (3) с заданным темпом. По достижении нулевой частоты контроллер силовой (1) переходит в режим ожидания пуска.
Итоги результатов математического моделирования, итоги серии проведенных экспериментов по подключению опытных образцов ДАТ к питающей электросети по предлагаемой схеме подключения позволили уже в ходе стендовых испытаний опытных образцов снизить в ДАТ: электрические потери на 15%, магнитные потери - на 49%, а суммарные потери (с учетом электрических, магнитных, добавочных и механических потерь) в двигателе асинхронном тяговом снижаются на 12% при работе данного электродвигателя в номинальном режиме при питании от ПЧ.
Заявляемая система ЧРАП крано-манипуляторной установки, реализованная как программно-аппаратный комплекс (в составе контроллер силовой модели КС-220 и программное обеспечение «Апрель-КС 1», двигатель асинхронный тяговый ДАТ), прошла испытания на выполнение требований ГОСТ РВ. Система ЧРАП может применяться в составе спецтехники, отвечает требованиям комплексов государственных военных стандартов «Климат-6» и «Мороз-7», что в целом подтверждает осуществимость достижения технического результата, новизну, надежность, общую и специальную промышленную применимость заявляемой системы ЧРАП.

| название | год | авторы | номер документа |
|---|---|---|---|
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Система автоматизированного регулирования частоты вращения вентилятора электровоза переменного тока | 2023 |
|
RU2819035C1 |
| СПОСОБ РЕЗЕРВИРОВАНИЯ ПРЕОБРАЗОВАТЕЛЕЙ ЧАСТОТЫ В СИСТЕМЕ ЭЛЕКТРОПРИВОДОВ ЦИРКУЛЯЦИОННЫХ НАСОСОВ ЭНЕРГООБЪЕКТА | 2012 |
|
RU2496209C1 |
| АСИНХРОННЫЙ ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА | 2004 |
|
RU2299512C2 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА И ОПУСКАНИЯ ГРУЗА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298520C2 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| ПРЕОБРАЗОВАТЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2385237C1 |
| ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ДВИГАТЕЛЕМ МЕХАНИЗМА ПОДЪЕМА-ОПУСКАНИЯ ГРУЗА | 2017 |
|
RU2663879C1 |
| ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОВОРОТА ГРУЗОПОДЪЕМНОГО КРАНА | 2005 |
|
RU2298519C2 |
Изобретение относится к области электротехники и предназначено для использования в системах управления электропривода с асинхронными двигателями с короткозамкнутым ротором для механизмов с циклическими режимами и динамическими нагрузками крано-манипуляторных установок мобильных транспортных средств как военной техники, так и гражданской техники, перемещающих ответственные грузы. Изобретение также может быть использовано в системах управления электроприводами общепромышленного и специального применения. Технический результат - повышение надежности, выражающееся в снижении количества отказов элементов системы частотно-регулируемого асинхронного электропривода крано-манипуляторной установки, а также в снижении электрических потерь. Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки содержит двигатель асинхронный тяговый и электрически соединенный с ним контроллер силовой. При этом в контроллере силовом реализована возможность переключения питания в номинальном режиме работы двигателя асинхронного тягового с импульсного широтно-модулированного напряжения на синусоидальное, посредством размыкания контактора, соединяющего двигатель асинхронный тяговый и двухзвенный преобразователь частоты, и замыкания контактора, соединяющего двигатель асинхронный тяговый и питающую электросеть. Изобретение обеспечивает плавное и точное перемещение грузов высокой степени опасности. 4 з.п. ф-лы. 2 ил., 2 табл.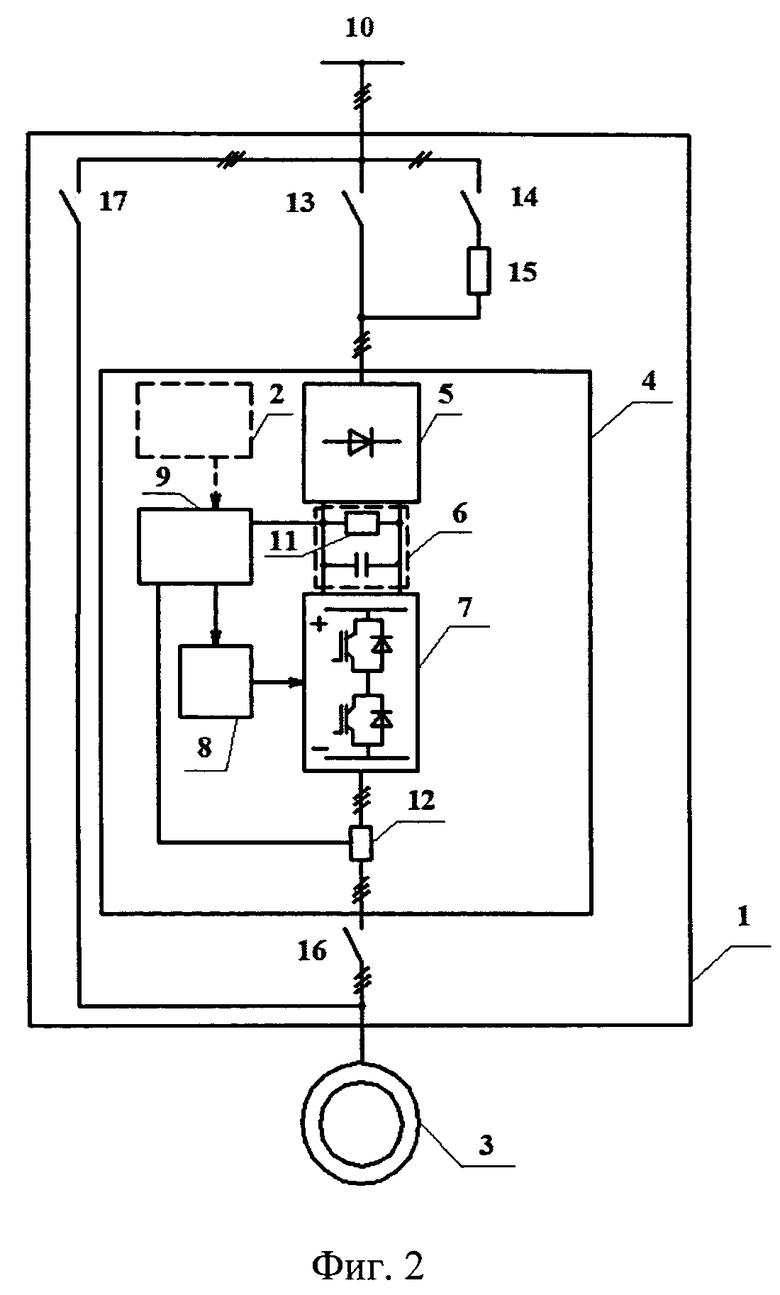
1. Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки, содержащая двигатель асинхронный тяговый и электрически соединенный с ним контроллер силовой, подключаемая к питающей электросети, при этом контроллер силовой включает двухзвенный преобразователь частоты на основе трехфазного мостового выпрямителя, промежуточное звено постоянного тока, автономный инвертор напряжения, плату драйверов, плату управления, реализующую прикладное программное обеспечение, отличающаяся тем, что содержит два контактора, при этом в контроллере силовом реализована возможность переключения питания в номинальном режиме работы двигателя асинхронного тягового с импульсного широтно-модулированного напряжения на синусоидальное, посредством размыкания контактора, соединяющего двигатель асинхронный тяговый и двухзвенный преобразователь частоты, и замыкания контактора, соединяющего двигатель асинхронный тяговый и питающую электросеть.
2. Система по п. 1, отличающаяся тем, что в контроллере силовом используется скалярная система управления с заложенным прикладным программным обеспечением для управления двигателем асинхронным тяговым.
3. Система по п. 1, отличающаяся тем, что в качестве двигателя асинхронного тягового используется двигатель асинхронный тяговый с параметрами питающего напряжения с номинальным фазным напряжением 127 В, номинальным линейным напряжением 220 В и частотой питания 400 Гц оборудования.
4. Система по п. 1, отличающаяся тем, что в контроллере силовом используется корпус-радиатор из алюминиевого сплава с расчетно-подобранной теплопроводностью металла корпуса.
5. Система по п. 1, отличающаяся тем, что для контроллера силового применяется корпус-радиатор из алюминиевого сплава расчетно подобранной теплопроводностью, имеющий профиль, геометрия которого в сечении обеспечивает оптимальное распределение и отвод возникающих тепловых потоков в замкнутом пространстве корпуса контроллера силового.
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Устройство для управления частотно-регулируемым электроприводом | 1978 |
|
SU741399A1 |
| CN 110581675 A, 17.12.2019 | |||
| Газоразрядный счетчик ядерных излучений | 1962 |
|
SU152038A1 |
| КРАНОВЫЙ ЭЛЕКТРОПРИВОД МЕХАНИЗМА ПОДЪЕМА ГРУЗА | 2007 |
|
RU2345945C1 |
| Устройство для частотного управления тяговым асинхронным электродвигателем | 1980 |
|
SU877768A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ К ТЯГАЧУ ДЛЯ РЫТЬЯ ТРАНШЕЙ | 0 |
|
SU184734A1 |

