Изобретение относится к области сельского хозяйства и может быть использовано в автоматизированных системах управления земледельческими технологиями при использовании информации оптических зондирующих приборов и систем.
Известен способ управления состоянием посевов на основе информации оптических датчиков дистанционного зондирования, размещенных непосредственно на технологических машинах (см. в книге «Точное сельское хозяйство (precision agriculture)», под общей редакцией Д. Шпаара, А.В. Захаренко, В.П. Якушева, стр. 144, 145. Санкт-Петербург-Пушкин, 2009 г.). В указанном способе на основе информации об отражении света в ближней инфракрасной и красной областях спектра, формируемой оптическими датчиками, определяют индекс NDVI (Normalized Difference Vegetation Index), получаемый путем деления разности параметров отражения в ближнем инфракрасном и красном диапазонах на их сумму, по которому регулируют дозы внесения азотных удобрений, для чего сначала определяют содержание хлорофилла в растениях, на основании которого оценивают поглощение азота посевами, и затем рассчитывают дозы внесения азотных удобрений.
Недостатком данного способа является то, что индекс NDVI, как и содержание хлорофилла в растениях, не являются показателями роста и развития растений, по которым можно обеспечить получение заданной величины урожая в конце периода вегетации. Кроме того, в данных способах не используется информация о состоянии почвенной среды, в частности о содержании в ней минеральных удобрений и запасе влаги, влияющем на поглощение посевами питательных элементов из почвы. Неучет этой информации приводит к тому, что в систему «растение - почва» вносятся те удобрения, которые посев может получить из почвы с ближайшими осадками, что в свою очередь вызывает перерасход дорогостоящих удобрений и нарушает требуемый оптимальный ход развития посевов. Кроме того, на цвет посева влияет и содержание других химических элементов, которые приводят к дополнительным ошибкам в определении содержания самого хлорофилла. В данных способах не раскрыта сама операция оптимизации доз внесения удобрений, так как здесь не используются математические модели и алгоритмы оптимизации, что не позволяет прогнозировать ожидаемый результат от проведения технологической операции.
Частично вышеуказанные недостатки устранены в способе, в котором дозы внесения азотных удобрений определяют путем сравнения параметров отражения посевов на основном поле и на тестовых площадках, расположенных вблизи поля, и на которых возделывают такую же, как и на основном поле, сельскохозяйственную культуру и применяют одинаковую технологию. При этом каждая тестовая площадка имеет различные известные по своей величине дозы внесения азотных удобрений, а дозу внесения на основном поле определяют по разности параметров отражения между посевами на основном поле и тестовых площадках (см. «Материалы Всероссийской конференции «Математические модели и информационные технологии в сельскохозяйственной биологии: Итоги и перспективы», 14-15 октбяря 2010 г., Агрофизический НИИ, Санкт-Петербург, с. 72-75).
Недостатком указанного способа является то, что параметры отражения посевов на основном поле и тестовых площадках не являются показателями роста и развития растений, поэтому дозы удобрений, определяемые по разности этих параметров на основном поле и тестовых площадках, не являются оптимальными с точки зрения получения заданной продуктивности посевов. Кроме того, здесь также не учитывается наличие удобрений в почве, доступность которых зависит от влажности почвы, что приводит к перерасходу удобрений и дополнительным потерям урожая за счет полегания посевов.
Прототипом изобретения является способ автоматизированного управления формированием урожая, включающий в себя операции по получению информации о физических свойствах, химическом составе почвы и о погодных условиях на сельскохозяйственном поле, а также информации о фактическом урожае за предыдущий год на каждом фрагменте сельскохозяйственного поля, сопоставляемой с сигналами системы определения пространственных координат во время уборки урожая, использование математических моделей влияния почвенных и климатических факторов на конечный урожай, производство расчетов по параметрам основных технологий перед посевом растений и проведение технологических воздействий в реальном времени в соответствии с этими расчетами для каждого фрагмента сельскохозяйственного поля, при этом перед началом периода вегетации определяют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды путем поиска максимума по параметрам технологических операций критерия оптимальности, учитывающего разность между стоимостью урожая и затратами на его получение, в реальном времени при рабочем проходе сельскохозяйственной машины с орудиями измеряют ее пространственные координаты, периодически фиксируют сигналы от метеостанции о температуре окружающего воздуха, уровне солнечной радиации, интенсивности осадков, по измеренной информации уточняют параметры моделей состояния растений и почвенной среды, для каждого фрагмента поля сравнивают измеренные значения показателей развития растений и параметров почвенной среды с их оптимальными средними значениями, по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий, для каждого фрагмента поля определяют размер общего технологического воздействия, складывающегося из оптимального среднего и локальной поправки, которое по модемной связи передают в форме задания бортовому регулятору орудия машины, осуществляющего технологическое воздействие (RU 2264703 C2, A01B 79/02, 27.11.2005 бюл. №33).
Основным недостатком данного способа является то, что для уточнения параметров математических моделей состояния посевов и почвенной среды кроме телевизионной съемки растений, спектральной фотоэлектронной съемки поверхности почвы необходимы измерения влажности и плотности почвы по всей площади поля не менее одного раза в три дня, что в условиях вегетирующих растений требует больших затрат ручного труда. Кроме того, для повышения точности и надежности управления минеральным питанием посевов необходима математическая модель химического состояния почвенной среды, для уточнения параметров которой требуется информация о реальном содержании доступных форм азота N, калия K и фосфора P в почве, что существенно увеличивает затраты ручного труда для отбора проб.
Изобретение решает задачу повышения величины и надежности процесса формирования урожая при существенном уменьшении объемов ручного труда, затрачиваемого на измерения за счет повышения степени его автоматизации на стадии, предшествующей периоду вегетации растений, и в процессе их роста и развития.
Заявляемый способ автоматизированного управления состоянием посевов, как и прототип, включает в себя операции по получению информации о физических свойствах, химическом составе почвы и о погодных условиях на сельскохозяйственном поле, а также информации о фактическом урожае за предыдущий год на каждом фрагменте сельскохозяйственного поля, сопоставляемой с сигналами системы определения пространственных координат во время уборки урожая, использование математических моделей влияния почвенных и климатических факторов на конечный урожай, производство расчетов по параметрам основных технологий перед посевом растений и проведение технологических воздействий в реальном времени в соответствии с этими расчетами для каждого фрагмента сельскохозяйственного поля, при этом перед началом периода вегетации определяют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды путем поиска максимума по параметрам технологических операций критерия оптимальности, учитывающего разность между стоимостью урожая и затратами на его получение, в реальном времени при рабочем проходе сельскохозяйственной машины с орудиями измеряют ее пространственные координаты, периодически фиксируют сигналы от метеостанции о температуре окружающего воздуха, уровне солнечной радиации, интенсивности осадков, по измеренной информации уточняют параметры моделей растений и почвенной среды, для каждого фрагмента поля сравнивают измеренные значения показателей развития растений и параметров почвенной среды с их оптимальными средними значениями, по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий, для каждого фрагмента поля определяют размер общего технологического воздействия, складывающегося из оптимального среднего и локальной поправки, которое по модемной связи передают в форме задания бортовому регулятору орудия машины, осуществляющего технологическое воздействие.
Заявляемый способ отличается от прототипа тем, что информацию о физических свойствах, химическом составе почвы и растений получают периодическим отбором проб на тестовых площадках, расположенных рядом с основным полем, на которых возделывается одна и та же культура, как и на основном поле, и которые отличаются друг от друга разными фиксированными уровнями поливов и дозами внесения минеральных удобрений и регуляторов роста и развития растений, одновременно с отборами проб на тестовых площадках средствами авиационного дистанционного зондирования формируют мультиспектральные изображения тестовых площадок и основного поля, по полученной спектральной информации и отобранным пробам уточняют математическую модель оптических измерений, отражающую связь состояния посевов и почвенной среды на тестовых площадках с параметрами отражения во всех используемых спектрах, по спектральной информации, полученной по всей площади основного поля, посредством математической модели оптических измерений оценивают состояние посевов и почвенной среды на основном поле для каждого момента времени измерения, по полученным оценкам и сигналам от метеостанции о температуре окружающего воздуха, уровне солнечной радиации и интенсивности осадков уточняют параметры математических моделей состояния посевов и почвенной среды, по которым затем уточняют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды, в реальном времени при рабочих проходах технологических машин одновременно с измерением пространственных координат повторно формируют мультиспектральную картину всей площади основного поля, по которой с заданным шагом оценивают состояние посевов и почвенной среды, полученные оценки на отдельных фрагментах поля сравнивают с их оптимальными средними значениями, полученными при формировании оптимальной программы изменения средних по полю показателей развития растений и параметров почвенной среды, по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий и для каждого фрагмента поля определяют размер общего технологического воздействия, складывающегося из оптимального среднего и локальной поправки в заданной пространственной координате.
Повышение величины и надежности получения урожая при одновременном снижении объемов ручного труда, затрачиваемого на измерения, достигается за счет предварительной идентификации математической модели оптического измерения состояния посевов и почвенной среды на тестовых площадках и использования этой модели для оценивания состояния посевов и идентификации математических моделей состояния посевов и почвенной среды на основном поле, на основе которых формируется оптимальная программа технологических воздействий на основном поле, которая корректируется в реальном времени для всех пространственных координат.
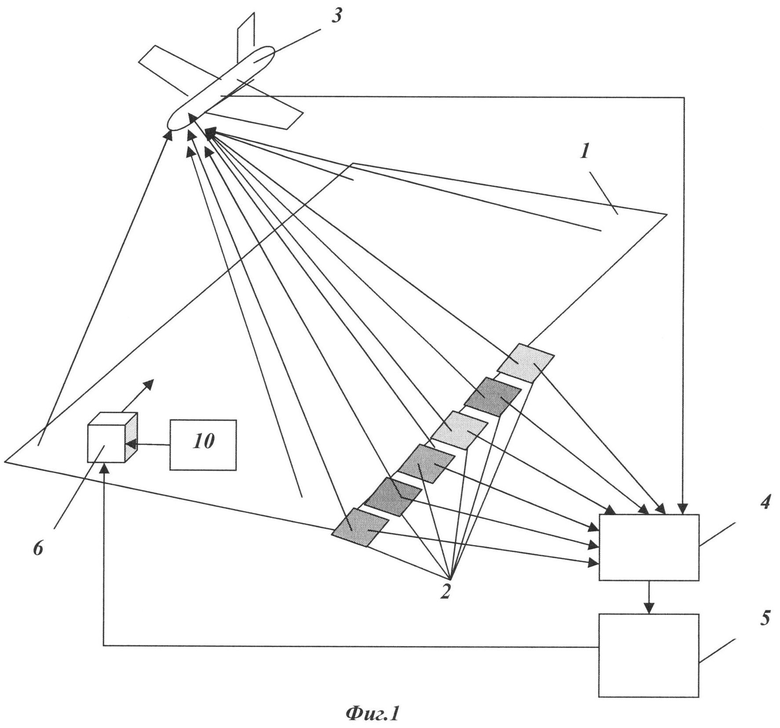
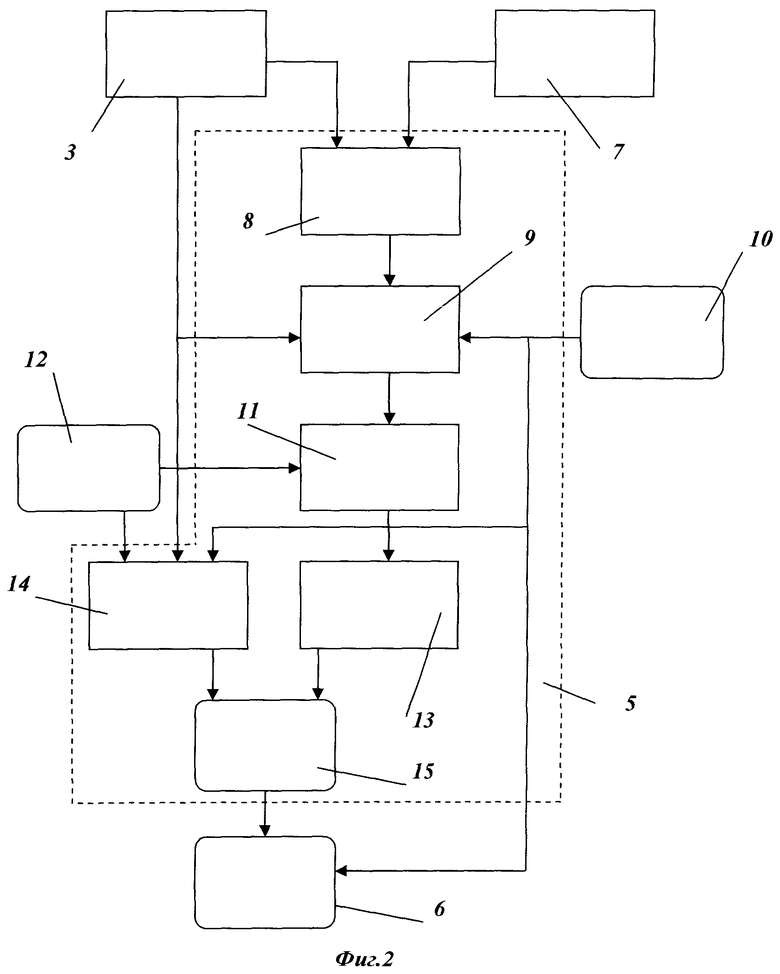
На фиг. 1 представлена общая технологическая схема реализации заявляемого способа, а на фиг. 2 - блок-схема последовательности операций, необходимых для реализации способа.
Рядом с основным полем 1 (фиг. 1) с посевом сельскохозяйственной культуры размещены тестовые площадки 2 с такой же сельскохозяйственной культурой. Площадь каждой тестовой площадки составляет 20-30 м2, а их число 6-10 единиц. На основном поле 1 и на тестовых площадках 2 применяют одну и ту же технологию, включающую одинаковый набор технологических воздействий. При этом независимо от состояния посевов на каждой тестовой площадке реализуют свой набор фиксированных по величине технологических воздействий, таких как поливы, внесение минеральных удобрений и регуляторов роста и развития. Для получения спектральной оптической информации о состоянии посевов и почвенной среды используют беспилотный малый летательный аппарат 3, совершающий пролеты над основным полем 1 и тестовыми площадками 2 с заданной периодичностью. Информацию о состоянии посевов и почвенной среды на тестовых площадках и спектральную информацию с основного поля и тестовых площадок хранят в базе данных 4, соединенной с управляющим устройством 5, к выходу которого подключен исполнительный регулятор технологической машины 6.
Управляющее устройство 5 (фиг. 2) содержит блок идентификации математической модели оптических измерений 8, к которому подключен источник оптической спектральной информации, размещенный на беспилотном малом летательном аппарате 3, и блок ввода информации о состоянии посевов и почвенной среды 7, получаемой при отборе проб с тестовых площадок 2. Выход блока идентификации математической модели оптических измерений 8 соединен с блоком оперативного оценивания состояния посевов и почвенной среды основного поля 9, к которому подключен источник спектральной информации, размещенный на беспилотном малом летательном аппарате 3, и блок определения пространственных координат 10. Выход блока оперативного оценивания 9 соединен с блоком идентификации математических моделей состояния посевов и почвенной среды основного поля 11, к которому также подключена метеостанция 12, содержащая информацию о температуре воздуха, солнечной радиации и об интенсивности осадков. Выход блока идентификации 11 соединен с блоком формирования оптимальных программ технологических воздействий на основном поле 13. Такими технологическими воздействиями являются поливы и внесение минеральных удобрений, регуляторов роста и развития растений. Для коррекции управления в пространстве и времени управляющее устройство 5 содержит блок динамического оценивания состояния посевов и почвенной среды основного поля 14, к которому подключена метеостанция 12, источник оптической спектральной информации, размещенный на беспилотном малом летательном аппарате 3, и блок определения пространственных координат 10. Выход блока динамического оценивания 14 подключен к блоку формирования общего технологического управления 15, выход которого, в свою очередь, соединен с исполнительным регулятором технологической машины 6.
Способ автоматизированного управления состоянием посевов на примере многолетних трав осуществляется следующим образом. После сева культуры на основном поле 1 и тестовых площадках 2, весной, перед началом вегетации на основном поле 1 по всей площади вносят основную заправку минеральных удобрений, а на тестовых площадках 2 вносят разное количество минеральных удобрений из всего диапазона возможных значений доз, чем создают разные условия произрастания растений. Периодически не реже чем через 5 дней посредством малого летательного аппарата 3 получают спектральные оптические изображения тестовых площадок 2, которые связаны с состоянием почвенной среды и различны для отдельных площадок в силу различия уровня технологических воздействий. Одновременно на тестовых площадках 2 отбирают пробы почвы для определения реального состояния. По спектральной информации и отобранным пробам в блоке 8 осуществляют идентификацию математической модели оптического измерения состояния почвенной среды следующего вида:

где YG - вектор спектральных показателей почвенной среды, содержащий не менее 4-х различных спектральных областей; Хп - вектор состояния почвенной среды размерностью [4×1], компонентами которого являются: х1n - влажность корнеобитаемого слоя почвы, кг/кг; х2n - содержание доступного азота, г/кг; х3n - содержание доступного калия, г/кг; х4n - содержание доступного фосфора, г/кг; все состояния объединяются в вектор; Н - матрица параметров, оцениваемых по спектральным данным и анализам отбираемых проб методом наименьших квадратов; Еп - вектор случайных ошибок измерения оптических показателей с нулевым математическим ожиданием и матрицей ковариаций R.
Идентификацию модели оптических измерений состояния почвенной среды (1) производят до появления всходов, когда их проективная площадь составляет не более 25% от общей площади основного поля. С этого момента кроме отбора проб почвы отбирают и пробы растений, а кроме модели (1) в блоке 8 осуществляют идентификацию и модели оптического измерения состояния посевов следующего вида:

где Yx - вектор спектральных показателей посевов, содержащий не менее 3-х различных спектральных областей; p - вектор масштабных параметров, P - матрица параметров связи между состояниями посева и спектральными показателями; Хм - вектор состояния посевов размерностью [3×1], для многолетних трав имеющий следующие компоненты: х1м - общая масса на единице площади, кг/м2; х2м - сухая масса на единице площади, кг/м2; х3м - содержание азота в растениях, мг/кг; Ем - вектор случайных ошибок моделирования. Оценивание параметров модели (2) по отбираемым пробам растений и спектральным характеристикам осуществляют методом наименьших квадратов.
После получения 5-6 оценок параметров моделей (1), (2) для каждого очередной мультиспектральной картины основного поля в блоке 9 осуществляют текущую оценку состояния посевов и почвенной среды основного поля 1. Для этого одновременно используют модели оптических измерений (1), (2), текущие оптические спектральные измерения и пространственные координаты, формируемые блоком 10. При этом оценки состояния почвенной среды на основе модели (1) для текущих спектральных измерений оценки YG и пространственных координат (z, h) строят следующим образом:

где  - оценка вектора состояния для малого участка поля с координатами (z, h), а все другие обозначения соответствуют обозначениям модели (1).
- оценка вектора состояния для малого участка поля с координатами (z, h), а все другие обозначения соответствуют обозначениям модели (1).
Оценки состояния посевов на основе модели (2), по измеренному вектору оптических показателей YX и пространственным координатам (z, h) определяют путем решения градиентным методом следующей оптимизационной задачи:

где 
Текущие оценки состояния посевов 


где 

 - динамическая матрица, параметры которой отражают инерционность процесса изменения состояния посевов;
- динамическая матрица, параметры которой отражают инерционность процесса изменения состояния посевов;  - матрица возмущений, отражающая чувствительность вектора состояния посевов к климатическим факторам;
- матрица возмущений, отражающая чувствительность вектора состояния посевов к климатическим факторам; 
а также математической модели состояния почвенной среды

где  - производная по времени вектора состояния почвенной среды; U - вектор технологического управления размерностью [4×1], компонентами которого являются: u1 - расход воды при поливе, кг/м2; u2 - расход азотных удобрений, г/м2; u3 - расход калийных удобрений, г/м2; u4 - расход фосфорных удобрений, г/м2; Xп(t0,z,h)=Xn0(z,h) - состояние почвенной среды в начале периода вегетации; ζ - [4×1] вектор случайных помех в модели;
- производная по времени вектора состояния почвенной среды; U - вектор технологического управления размерностью [4×1], компонентами которого являются: u1 - расход воды при поливе, кг/м2; u2 - расход азотных удобрений, г/м2; u3 - расход калийных удобрений, г/м2; u4 - расход фосфорных удобрений, г/м2; Xп(t0,z,h)=Xn0(z,h) - состояние почвенной среды в начале периода вегетации; ζ - [4×1] вектор случайных помех в модели;  - динамическая матрица, отражающая инерционность процесса изменения состояния почвенной среды;
- динамическая матрица, отражающая инерционность процесса изменения состояния почвенной среды; 
Оценивание параметров математических моделей (5), (6) осуществляется путем решения следующей оптимизационной задачи:

где g1, g2 - весовые множители критерия адаптации (7), посредством которых устанавливают соотношение ошибок адаптации состояния посевов и состояния почвенной среды; 

Оценки параметров математических моделей (5), (6) 







где с - цена единицы массы урожая, руб., 
При заданной прибыли П*, в блоке 11 минимизируют следующий критерий оптимальности управления, обеспечивающий достижение заданной прибыли с единицы площади поля, что равносильно минимизации отклонения от заданной прибыли

где ΩU - область допустимых с экологической точки зрения управлений.
Минимизацию критерия (9) осуществляют по следующей градиентной последовательности операций

где Δi - шаг оптимизации.
Результатом выполнения последовательности операций (10) является последовательность технологических воздействий U*(t), выполняемых в известные моменты времени, величина которых одинакова по всей площади основного поля.
В реальном времени, при выполнении технологических операций, по информации о текущих оптических спектральных параметрах YG, YХ, получаемой при пролетах малого летательного аппарата 3, текущей информации о метеорологических параметрах F, формируемой метеостанцией 12, и пространственным координатам (z, h), формируемым блоком 10, в блоке динамического оценивания 14 осуществляют оценивание текущего состояния посевов, информация о котором 

где W*(t,h,z) - общее технологическое управление, реализуемое в пространственной координате (z, h) и в момент времени t, K - матрица параметров корректирующего регулятора.
Общее управление W*(t,h,z) в виде задающего сигнала передают на бортовой регулятор технологической машины 6, которая перемещается по основному полю 1 и выполняет технологические операции, которыми могут быть поливы, подкормки минеральными удобрениями или внесение регуляторов роста и развития.
Наличие тестовых площадок с разными фиксированными уровнями технологических воздействий, за счет чего создаются разные условия произрастания посевов, периодический отбор проб почвы и растений с этих площадок в сочетании с оптической спектральной информацией, получаемой со средств малой беспилотной авиации, позволяет оценить с достаточной точностью параметры математических моделей оптических измерений состояния посевов и почвенной среды. В свою очередь использование этих моделей в сочетании с оптической спектральной информацией по основному полю позволяет оценить с достаточной для управления точностью состояние посевов и почвенной среды на основном поле без отбора проб почвы и растений и на основании этих оценок идентифицировать и адаптировать в реальном времени математические модели состояния посевов и почвенной среды. Это позволяет оптимизировать программу технологического управления и корректировать ее по площади поля с учетом пространственной неоднородности состояния посевов и почвенной среды. В целом это позволяет увеличить урожайность культур не менее чем на 50% и надежность (вероятность) его получения до уровня 0,8-0,85 и за счет этого получить экономический эффект не менее 10-15 тыс. руб. для зерновых культур с одного гектара сельскохозяйственных земель.
Изобретение относится к области сельского хозяйства. Способ включает операции по получению информации о физических свойствах, химическом составе почвы и о погодных условиях на сельскохозяйственном поле, а также информации о фактическом урожае за предыдущий год на каждом фрагменте сельскохозяйственного поля, сопоставляемой с сигналами системы определения пространственных координат во время уборки урожая, использование математических моделей влияния почвенных и климатических факторов на конечный урожай, производство расчетов по параметрам основных технологий перед посевом растений и проведение технологических воздействий в реальном времени в соответствии с этими расчетами для каждого фрагмента сельскохозяйственного поля. Перед началом периода вегетации определяют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды путем поиска максимума по параметрам технологических операций критерия оптимальности, учитывающего разность между стоимостью урожая и затратами на его получение. В реальном времени при рабочем проходе сельскохозяйственной машины с орудиями измеряют ее пространственные координаты, периодически фиксируют сигналы от метеостанции о температуре окружающего воздуха, уровне солнечной радиации, интенсивности осадков. По измеренной информации уточняют параметры моделей растений и почвенной среды, для каждого фрагмента поля сравнивают измеренные значения показателей развития растений и параметров почвенной среды с их оптимальными средними значениями, по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий. Для каждого фрагмента поля определяют размер общего технологического воздействия, складывающегося из оптимального среднего и локальной поправки, которое по модемной связи передают в форме задания бортовому регулятору орудия машины, осуществляющего технологическое воздействие. Информацию о физических свойствах, химическом составе почвы и растений получают периодическим отбором проб на тестовых площадках, расположенных рядом с основным полем, на которых возделывается одна и та же культура, как и на основном поле, и которые отличаются друг от друга разными фиксированными уровнями поливов и дозами внесения минеральных удобрений и регуляторов роста и развития растений. Одновременно с отборами проб на тестовых площадках средствами авиационного дистанционного зондирования формируют мультиспектральные изображения тестовых площадок и основного поля, по полученной спектральной информации и отобранным пробам уточняют математическую модель оптических измерений, отражающую связь состояния посевов и почвенной среды на тестовых площадках с параметрами отражения во всех используемых спектрах, по спектральной информации, полученной по всей площади основного поля, посредством математической модели оптических измерений оценивают состояние посевов и почвенной среды на основном поле для каждого момента времени измерения, по полученным оценкам и сигналам от метеостанции о температуре окружающего воздуха, уровне солнечной радиации и интенсивности осадков уточняют параметры математических моделей состояния посевов и почвенной среды, по которым затем уточняют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды, в реальном времени. При рабочих проходах технологических машин одновременно с измерением пространственных координат повторно формируют мультиспектральную картину всей площади основного поля, по которой с заданным шагом оценивают состояние посевов и почвенной среды, полученные оценки на отдельных фрагментах поля сравнивают с их оптимальными средними значениями, полученными при формировании оптимальной программы изменения средних по полю показателей развития растений и параметров почвенной среды. По результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий и для каждого фрагмента поля определяют размер общего технологического воздействия, складывающегося из оптимального среднего и локальной поправки в заданной пространственной координате. Способ позволяет повысить величину и надежность процесса формирования урожая при существенном уменьшении объемов ручного труда. 2 ил.
Способ автоматизированного управления состоянием посевов, включающий в себя операции по получению информации о физических свойствах, химическом составе почвы и о погодных условиях на сельскохозяйственном поле, а также информации о фактическом урожае за предыдущий год на каждом фрагменте сельскохозяйственного поля, сопоставляемой с сигналами системы определения пространственных координат во время уборки урожая, использование математических моделей влияния почвенных и климатических факторов на конечный урожай, производство расчетов по параметрам основных технологий перед посевом растений и проведение технологических воздействий в реальном времени в соответствии с этими расчетами для каждого фрагмента сельскохозяйственного поля, при этом перед началом периода вегетации определяют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды путем поиска максимума по параметрам технологических операций критерия оптимальности, учитывающего разность между стоимостью урожая и затратами на его получение, в реальном времени при рабочем проходе сельскохозяйственной машины с орудиями измеряют ее пространственные координаты, периодически фиксируют сигналы от метеостанции о температуре окружающего воздуха, уровне солнечной радиации, интенсивности осадков, по измеренной информации уточняют параметры моделей растений и почвенной среды, для каждого фрагмента поля сравнивают измеренные значения показателей развития растений и параметров почвенной среды с их оптимальными средними значениями, по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий, для каждого фрагмента поля определяют размер общего технологического воздействия, складывающегося из оптимального среднего и локальной поправки, которое по модемной связи передают в форме задания бортовому регулятору орудия машины, осуществляющего технологическое воздействие, отличающийся тем, что информацию о физических свойствах, химическом составе почвы и растений получают периодическим отбором проб на тестовых площадках, расположенных рядом с основным полем, на которых возделывается одна и та же культура, как и на основном поле, и которые отличаются друг от друга разными фиксированными уровнями поливов и дозами внесения минеральных удобрений и регуляторов роста и развития растений, одновременно с отборами проб на тестовых площадках средствами авиационного дистанционного зондирования формируют мультиспектральные изображения тестовых площадок и основного поля, по полученной спектральной информации и отобранным пробам уточняют математическую модель оптических измерений, отражающую связь состояния посевов и почвенной среды на тестовых площадках с параметрами отражения во всех используемых спектрах, по спектральной информации, полученной по всей площади основного поля, посредством математической модели оптических измерений оценивают состояние посевов и почвенной среды на основном поле для каждого момента времени измерения, по полученным оценкам и сигналам от метеостанции о температуре окружающего воздуха, уровне солнечной радиации и интенсивности осадков уточняют параметры математических моделей состояния посевов и почвенной среды, по которым затем уточняют оптимальную программу изменения средних по полю показателей развития растений и параметров почвенной среды, в реальном времени, при рабочих проходах технологических машин одновременно с измерением пространственных координат повторно формируют мультиспектральную картину всей площади основного поля, по которой с заданным шагом оценивают состояние посевов и почвенной среды, полученные оценки на отдельных фрагментах поля сравнивают с их оптимальными средними значениями, полученными при формировании оптимальной программы изменения средних по полю показателей развития растений и параметров почвенной среды, по результатам сравнения формируют поправки к средним оптимальным значениям параметров технологических воздействий и для каждого фрагмента поля определяют размер общего технологического воздействия, складывающегося из оптимального среднего и локальной поправки в заданной пространственной координате.
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ФОРМИРОВАНИЕМ УРОЖАЯ | 2003 |
|
RU2264703C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ТИПОВ РАСТИТЕЛЬНОСТИ | 2003 |
|
RU2242716C2 |
| КОСТЮК В.И | |||
| Оперативное управление поливами на орошаемых землях //Технология, механизация и автоматизация орошения, 1987, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| FROHLICH H.; WALTER E | |||
| Aufgaben und Tendenzen bei der Anzucht von Jungpglanzen fur die Produktion von Feldgemuse //Gartnerpost, 1988, Т | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

