Изобретение относится к области мелиорации сельского хозяйства, в частности к техническим средствам для орошения посевов сельскохозяйственных культур и внесения жидких минеральных удобрений.
Известно устройство автоматизированного управления многоопорной дождевальной машиной фронтального действия точного полива, включающее блок синхронизации движения по курсу с направляющим тросом и блок управления скоростью движения машины, входы которого соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, расходомером и манометром, установленным на трубопроводе, а выходы блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыла, через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом. Микропроцессорный блок управления соединен с входом-выходом интерфейсного устройства (RU 2522526 С1, 2014).
Недостатком известного устройства является отсутствие блока определения заданной нормы полива, учитывающей состояние посева и почвенной среды и их целенаправленные изменения, а также блока формирования устройством единой нормы полива по всей площади поля при наличии пространственной неоднородности состояния посева и почвенной среды. Это приводит к перерасходу воды и заболачиваю почвы в тех местах, где поливная норма превышает оптимальное значение для данного типа почвы и текущих погодных условий. В результате такое устройство не обеспечивает заданный влажностный режим посева сельскохозяйственных культур.
Наиболее близким по технической сущности к заявляемому является устройство для дифференцированного орошения посевов, включающее в себя блок автоматизированного управления многоопорной фронтальной дождевальной машиной точного полива с установленными на тележках с электроприводом трубопроводами правого и левого крыльев машины с оросительными форсунками, мультиспектральный прибор дистанционного зондирования, базирующийся на беспилотном летательном аппарате, а также блок управления движением дождевальной машины и многоканальный блок формирования оптимальных норм полива, содержащий блок оценивания состояния посева и водозапаса почвы, блок оптимизации норм полива, датчик системы глобального позиционирования ГЛОНАСС, блок усреднения данных дистанционного зондирования Земли и блок локальной коррекции норм полива (RU 2650534 С2, 2018 - прототип). Оросительные форсунки дождевальной машины оборудованы управляемыми запорными клапанами, расходомерами воды и локальными регуляторами норм полива. Расходомеры воды подключены к входам локальных регуляторов норм полива, управляющие выходы которых подключены к исполнительным механизмам управляемых запорных клапанов, а сигнальные выходы - к блоку управления движением дождевальной машины. Выходы многоканального блока формирования оптимальных норм полива соединены с входами блока локальной коррекции норм полива, выходы которого соединены с задающими входами локальных регуляторов норм полива.
Автором этого устройства решена задача обеспечения заданного влажностного режима посевов за счет повышения точности определения норм полива, однако не решена задача управления биомассой растений для получения требуемого урожая ввиду отсутствия в устройстве средств контроля содержания азота в почве и определения связанных между собой оптимальных доз внесения азота и норм полива.
Заявляемое изобретение - устройство для дифференцированного управления орошением посевов с одновременным внесением жидких минеральных удобрений - направлено на решение задачи управления биомассой растений с целью получения планируемого урожая сельскохозяйственных культур за счет определения и технической реализации связанных между собой оптимальных доз внесения жидких азотных удобрений и норм полива.
Она решена в устройстве, которое, как и прототип, включает в себя многоопорную фронтальную дождевальную машину с установленными на управляемых тележках трубопроводами правого и левого крыльев машины с оросительными форсунками, мультиспектральный прибор дистанционного зондирования, базирующийся на беспилотном летательном аппарате, а также блок управления движением дождевальной машины и многоканальный блок формирования оптимальных норм полива, содержащий блок оценивания параметров состояния посева и водозапаса почвы, блок формирования средних по площади поля норм полива, блок локальной коррекции оптимальных норм полива, датчик системы глобального позиционирования ГЛОНАСС и блок усреднения данных дистанционного зондирования Земли. Кроме этого, оросительные форсунки оборудованы управляемыми запорными клапанами, локальными регуляторами норм полива и расходомерами воды, которые подключены к входам локальных регуляторов норм полива, управляющие выходы которых подключены к исполнительным механизмам управляемых запорных клапанов, а сигнальные выходы - к блоку управления движением дождевальной машины. При этом выход многоканального блока формирования оптимальных норм полива соединен с входами блока локальной коррекции оптимальных норм полива, выходы которого соединены с задающими входами локальных регуляторов норм полива.
В отличие от прототипа многоопорная фронтальная дождевальная машина дополнительно оборудована емкостью для жидких азотных удобрений и распределительным трубопроводом, а оросительные форсунки - индивидуальными управляемыми дозаторами жидких азотных удобрений, Многоканальный блок формирования оптимальных норм полива дополнительно оборудован блоком определения оптимальных доз жидких азотных удобрений, блок локальной коррекции оптимальных норм полива - блоком локальной коррекции доз жидких азотных удобрений, а локальные регуляторы норм полива -локальными регуляторами доз жидких азотных удобрений. Индивидуальные управляемые дозаторы жидких азотных удобрений, выполненные в виде поршневых пар с электрическими сервоприводами и встроенными датчиками положения, подключены к распределительному трубопроводу и поливным трубопроводам через обратные клапаны, а управляемые входы индивидуальных управляемых дозаторов жидких азотных удобрений соединены с выходами локальных регуляторов доз жидких азотных удобрений, входы которых связаны с датчиками положения электрических сервоприводов. Выход многоканального блока формирования оптимальных норм полива и доз жидких азотных удобрений соединен с входом двухканального блока локальной коррекции оптимальных норм полива и доз жидких азотных удобрений, выходы которого соединены с задающими входами локальных регуляторов норм полива и доз жидких азотных удобрений.
Благодаря тому, что многоопорная фронтальная дождевальная машина дополнительно оборудована емкостью для жидких азотных удобрений и распределительным трубопроводом, а оросительные форсунки - индивидуальными управляемыми дозаторами жидких азотных удобрений, подключенными к распределительному трубопроводу и поливным трубопроводам через обратные клапаны, достигается расширение функциональных возможностей заявляемого устройства за счет одновременного управления содержанием влаги и минерального питания в почве и, как следствие, - возможность эффективного управления биомассой растений.
Кроме этого, дополнение многоканального блока формирования оптимальных норм полива блоком определения оптимальных доз жидких азотных удобрений и соединение его с входами двухканального блока локальной коррекции оптимальных норм полива и доз жидких азотных удобрений, выходы которого соединены с задающими входами локальных регуляторов норм полива и доз жидких азотных удобрений, обеспечивают высокую точность определения и надежность технической реализации оптимального соотношения норм полива и доз внесения жидких азотных удобрений и тем самым - обеспечивают гарантированное получение заданного урожая.
Выполнение индивидуальных управляемых дозаторов жидких азотных удобрений в виде поршневых пар с электрическими сервоприводами и встроенными датчиками положения, управляемые входы которых соединены с выходами локальных регуляторов доз жидких азотных удобрений, входы которых связаны с датчиками положения электрических сервоприводов и выходами двухканального блока локальной коррекции оптимальных норм полива и доз жидких азотных удобрений, позволяет повысить точность определения оптимальных доз внесения жидких азотных удобрений при простоте конструкции устройства.
Предлагаемое устройство иллюстрируется чертежами, представленными на фиг. 1-9, на которых изображены:
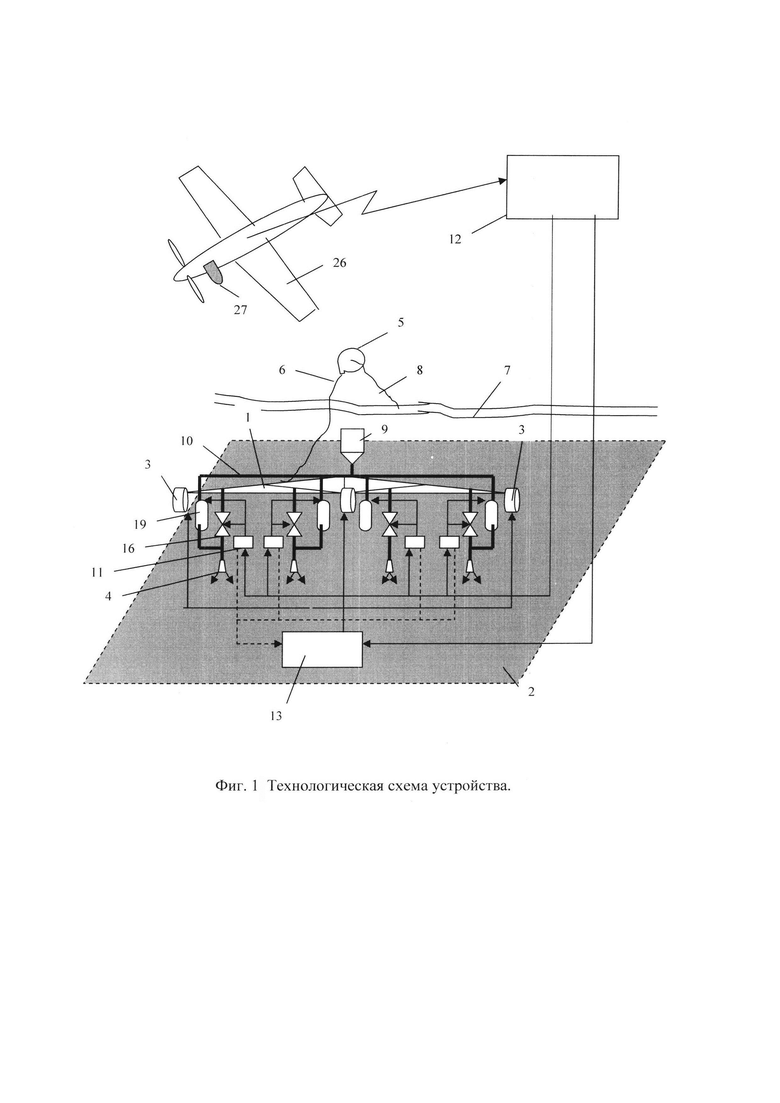
на фиг. 1 - технологическая схема заявляемого устройства;
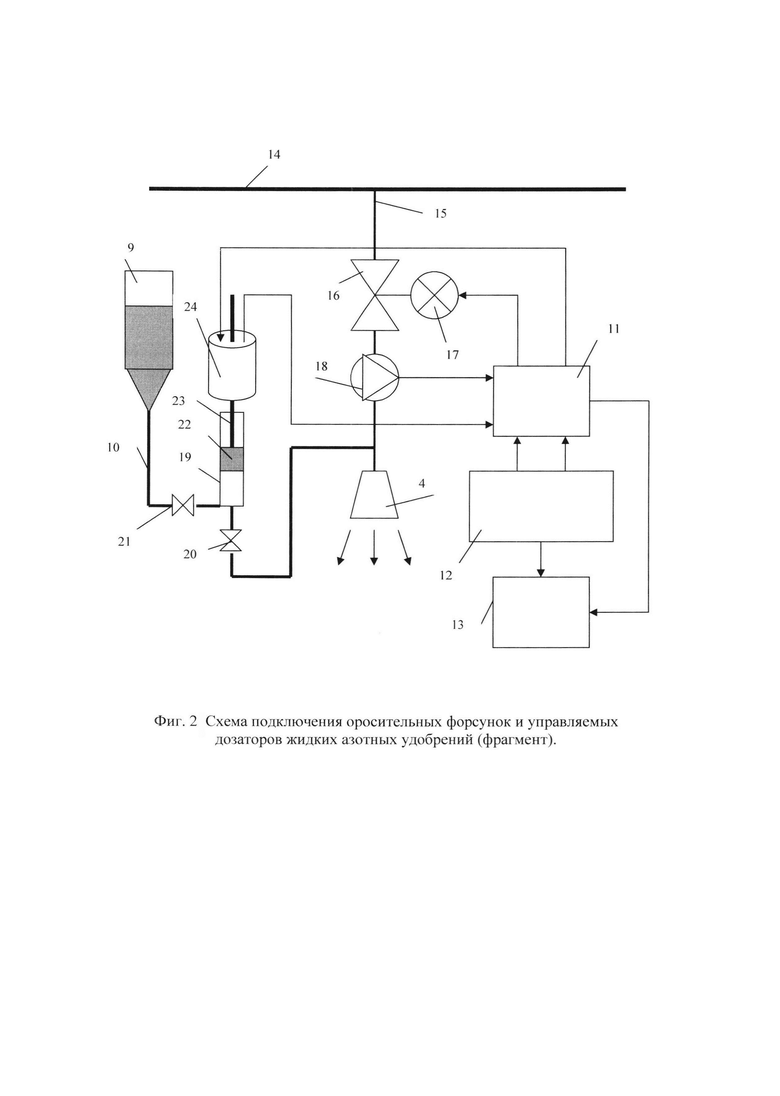
на фиг. 2 - схема подключения оросительных форсунок и управляемых дозаторов жидких азотных удобрений (фрагмент);
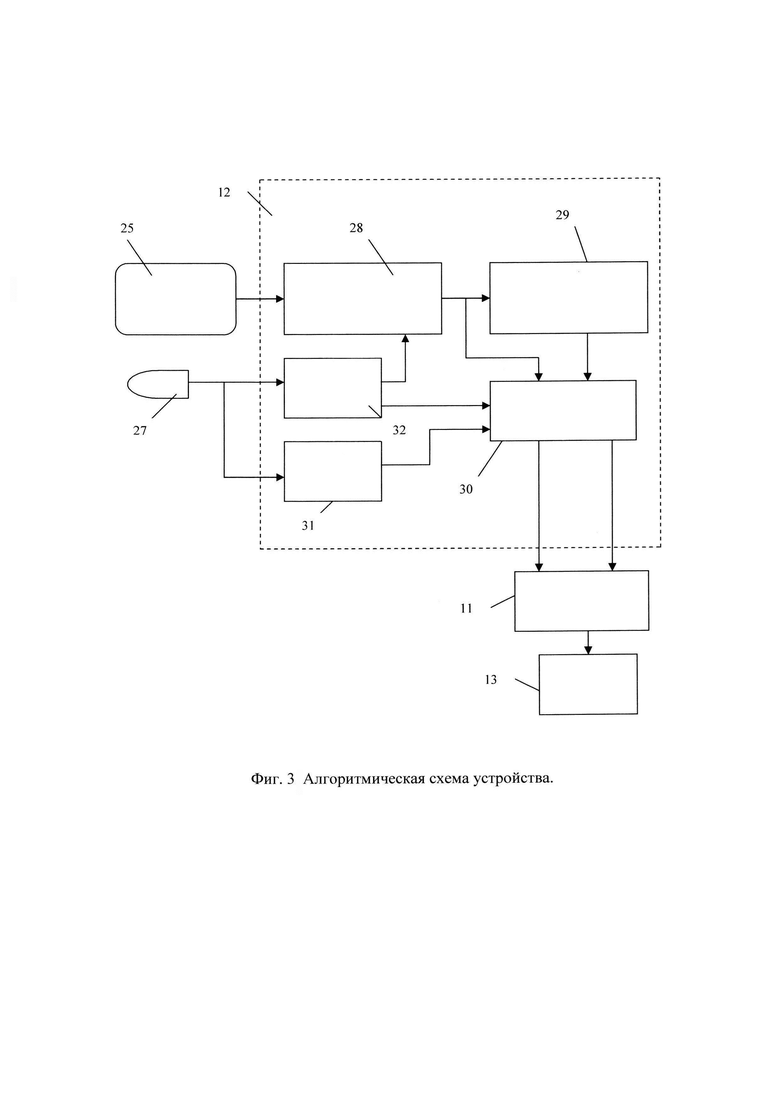
на фиг. 3 - алгоритмическая схема устройства;
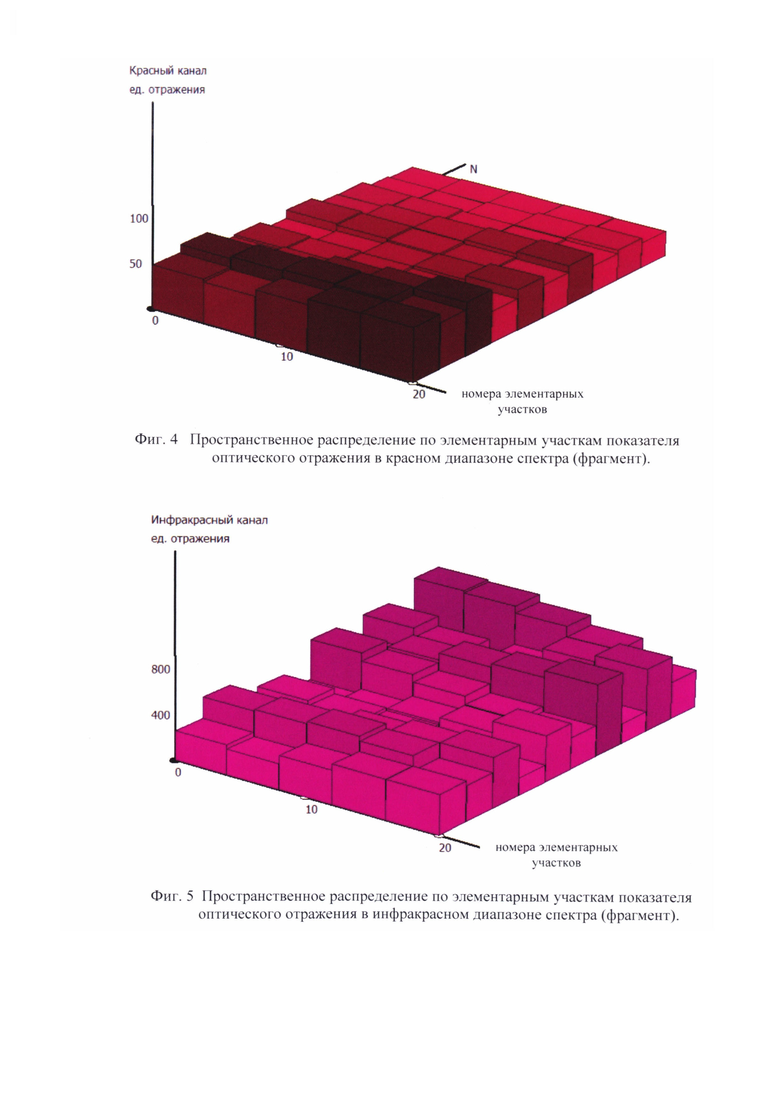
на фиг. 4 - пространственное распределение по элементарным участкам показателя оптического отражения в красном диапазоне спектра (фрагмент);
на фиг. 5 - пространственное распределение по элементарным участкам показателя оптического отражения в инфракрасном диапазоне спектра (фрагмент);
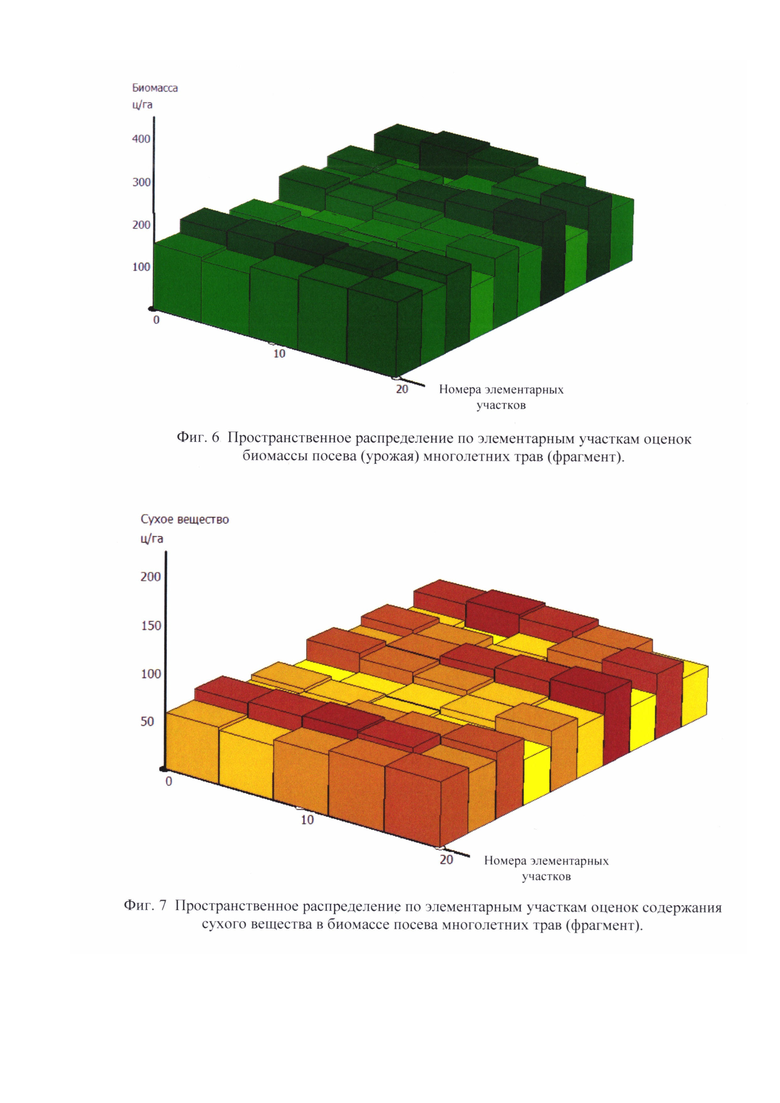
на фиг. 6 - пространственное распределение по элементарным участкам оценок биомассы посева (урожая) многолетних трав (фрагмент);
на фиг. 7 - пространственное распределение по элементарным участкам оценок содержания сухого вещества в биомассе посева многолетних трав (фрагмент);
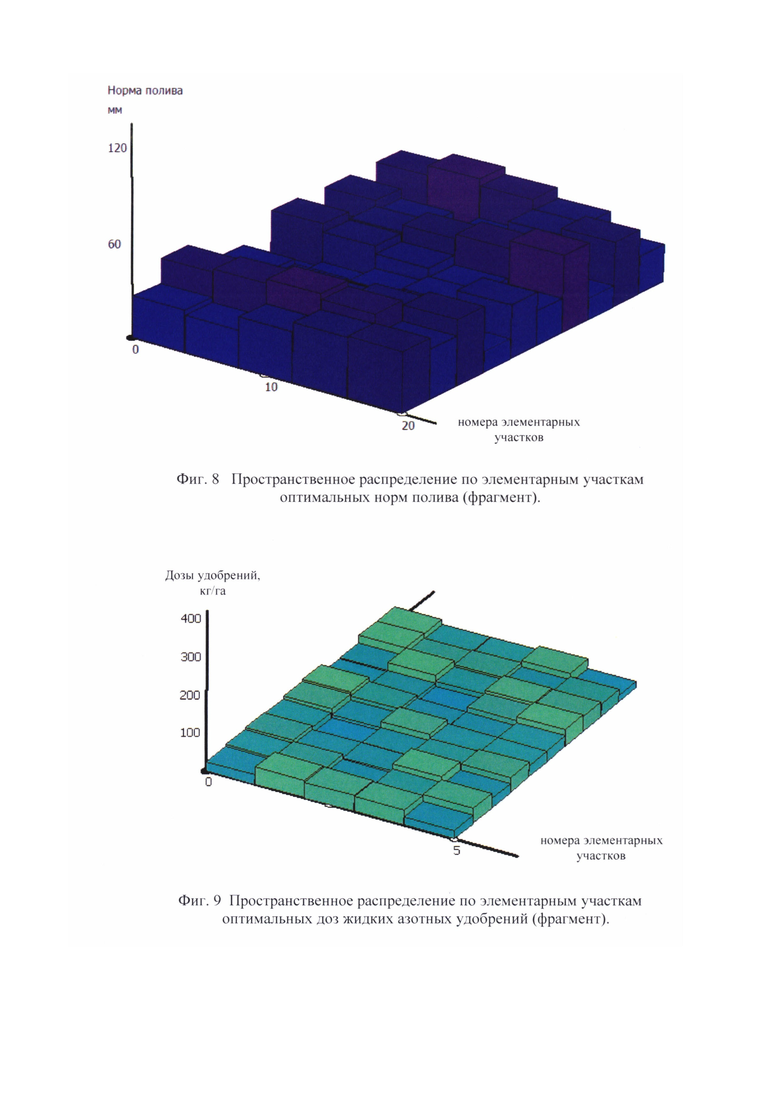
на фиг. 8 - пространственное распределение по элементарным участкам оптимальных норм полива (фрагмент);
на фиг. 9 - пространственное распределение по элементарным участкам оптимальных доз жидких азотных удобрений (фрагмент).
Устройство для дифференцированного управления орошением посевов с одновременным внесением жидких минеральных удобрений содержит многоопорную фронтальную дождевальную машину точного полива 1 (фиг. 1), перемещающуюся по сельскохозяйственному полю 2 посредством управляемых тележек 3 и оборудованную оросительными форсунками 4, расположенными равномерно по длине многоопорной фронтальной дождевальной машины 1, давление и расход воды в которой обеспечивается мобильной насосной станцией 5 через напорный шланг 6. Забор воды мобильной насосной станцией 5 осуществляют из оросительного канала 7 посредством безнапорного шланга 8. Многоопорная фронтальная дождевальная машина 1 оборудована емкостью для жидких азотных удобрений 9 и распределительным трубопроводом 10. Каждая оросительная форсунка 4 оборудована двухканальным локальным регулятором 11 норм полива и доз жидких азотных удобрений, задающие входы которых соединены с многоканальным блоком 12 формирования оптимальных норм полива и доз жидких азотных удобрений. Управление тележками 3 многоопорной фронтальной дождевальной машины 1 осуществляют блоком 13 управления движением дождевальной машины 1, пусковой вход которого соединен с сигнальными выходами двухканальных локальных регуляторов 11 норм полива и доз жидких азотных удобрений.
Оросительные форсунки 4 крепятся к напорному трубопроводу 14 многоопорной фронтальной дождевальной машины 1 посредством поливных трубопроводов 15 (фиг. 2), на которых установлены запорные клапаны 16 с исполнительными механизмами 17, а также - расходомеры воды 18, подключенные к первым входам двухканальных локальных регуляторов 11 норм полива и доз жидких азотных удобрений, управляющие выходы которых соединены с исполнительными механизмами 17 запорных клапанов 16.
Каждая оросительная форсунка 4 оборудована индивидуальным управляемым дозатором 19 жидких азотных удобрений, соединенным с поливным трубопроводом 15 через обратный клапан 20 и с распределительным трубопроводом жидких удобрений 10 - через обратный клапан 21. Индивидуальные управляемые дозаторы 19 жидких азотных удобрений выполнены в виде поршневых пар 22, штоки 23 которых являются якорями электрических сервоприводов 24 с встроенными датчиками положения, подключенными ко вторым входам двухканальных локальных регуляторов 11 норм полива и доз жидких азотных удобрений. Исполнительные механизмы 17 запорных клапанов 16 и управляющие входы электрических сервоприводов 24 индивидуальных управляемых дозаторов 19 жидких азотных удобрений подключены к управляющим выходам двухканальных локальных регуляторов 11 норм полива и доз жидких азотных удобрений, задающие входы которых соединены с выходами многоканального блока 12 формирования оптимальных норм полива и доз жидких азотных удобрений. Блок управления движением дождевальной машины 13 соединен с сигнальными выходами двухканальных локальных регуляторов 11 норм полива и доз жидких азотных удобрений.
Для контроля климатических параметров на сельскохозяйственном поле 2 в устройстве используется метеостанция 25, а для контроля состояния посева - беспилотный летательный аппарат 26, оборудованный мультиспектральным прибором дистанционного зондирования 27, подключаемого через радиомодем (на схеме не показан) к многоканальному блоку 12 формирования оптимальных норм полива и доз жидких азотных удобрений (фиг. 1 и 3).
Многоканальный блок 12 формирования оптимальных норм полива и доз жидких азотных удобрений включает в себя блок 28 оценивания параметров состояния посева и водозапаса почвы, блок 29 формирования средних по площади поля оптимальных норм полива и доз жидких азотных удобрений, двухканальный блок 30 локальной коррекции оптимальных норм полива и доз жидких азотных удобрений, а также датчик 31 системы глобального позиционирования ГЛОНАСС и блок 32 усреднения данных дистанционного зондирования Земли. К входу блока 28 оценивания параметров состояния посевов и водозапаса почвы через радиомодем подключены датчики метеопараметров метеостанции 25, а также - выход блока 32 усреднения данных дистанционного зондирования Земли, к входу которого через радиомодем подключен мультиспектральный прибор 27 дистанционного зондирования. Выход блока 28 оценивания параметров состояния посевов и водозапаса почвы соединен с входом блока 29 формирования средних по площади поля оптимальных норм полива и доз жидких азотных удобрений, выход которого соединен с одним из входов двухканального блока 30 локальной коррекции оптимальных норм полива и доз жидких азотных удобрений. К другим входам последнего подключены: выход блока 32 усреднения данных дистанционного зондирования Земли, выход блока 28 оценивания параметров состояния посева и водозапаса почвы, а также через датчик 31 системы глобального позиционирования ГЛОНАСС - мультиспектральный прибор дистанционного зондирования 27. Выходы двухканального блока 30 локальной коррекции оптимальных норм полива и доз жидких азотных удобрений подключены к входам двухканального локального регулятора 11 норм полива и доз жидких азотных удобрений.
Устройство для дифференцированного управления орошением посевов с одновременным внесением жидких азотных удобрений работает следующим образом. Весь период вегетации предварительно разбивают на интервалы управления (Ti, Ti+1), где i=1, 2…N - номера и общее число интервалов, а площадь поля разбивают на элементарные участки площадью по 2,0-3,0 м2 с пространственными координатами (z, h). В конце каждого интервала задают программу требуемого развития посева в форме вектора  , компонентами которого являются общая биомасса
, компонентами которого являются общая биомасса  , ц/га и масса сухого вещества
, ц/га и масса сухого вещества  , ц/га.
, ц/га.
С начала периода вегетации Т0 до наступления начала очередного интервала управления Ti, мультиспектральным прибором 27 дистанционного зондирования, базируемом на беспилотном летательном аппарате 26, периодически (один раз в каждые трое суток) формируется информация о параметрах отражения посева по всей площади основного поля: в красном диапазоне - y1(t), % (фиг. 4) и в инфракрасном диапазоне у2(t), % (фиг. 5). Одновременно на метеостанции 25 формируют информацию о следующих метеопараметрах: ƒ1(t) - среднесуточная температура воздушной среды, °С; ƒ2(t) - среднесуточный уровень радиации, Вт/(м2⋅час); ƒ3(t) - среднесуточный уровень осадков, мм. Информация с мультиспектрального прибора 27 дистанционного зондирования и метеостанции 25 через радиомодемы поступает на вход блока 28 оценивания параметров состояния посевов. На основании этой информации в блоке 28 оценивают средние по полю параметры биомассы посева и влагозапаса почвы в каждый момент получения информации по следующему алгоритму:
где:  - оценки векторов состояния посева; WT(P,X) - векторно-матричное представление модели оптических измерений; Y(t) - вектор текущих оптических измерений (данных ДЗЗ - дистанционного зондирования Земли, формируемых прибором 27); R - матрица ковариаций априорных ошибок оценивания; М[Х0] - вектор математических ожиданий начальных условий оценивания; Σ - матрица ковариаций ошибок ДЗЗ; т - оператор транспонирования вектора и матрицы.
- оценки векторов состояния посева; WT(P,X) - векторно-матричное представление модели оптических измерений; Y(t) - вектор текущих оптических измерений (данных ДЗЗ - дистанционного зондирования Земли, формируемых прибором 27); R - матрица ковариаций априорных ошибок оценивания; М[Х0] - вектор математических ожиданий начальных условий оценивания; Σ - матрица ковариаций ошибок ДЗЗ; т - оператор транспонирования вектора и матрицы.
Для реализации алгоритма оценивания (1) в устройстве используют следующие математические модели:
- динамическая модель параметров состояния посева и влагозапаса почвы

где: x1, x2 - общая и сухая надземная масса растений, ц/га; x3 - влагозапас почвы, мм; u1 - норма полива, т/га; u2 - доза внесения жидких азотных удобрений, кг/га; ƒ1 - среднесуточная температура воздушной среды, °С; ƒ2 - среднесуточный уровень радиации, Вт/(м2⋅час); ƒ3 - среднесуточный уровень осадков, мм; Ω1, Ω2 - области ограничений на нормы полива и дозы удобрений;
- символьная векторно-матричная форма модели (2), используемая в алгоритме (1)

- модель оптических измерений (данных ДЗЗ)

где: у1, у2 - параметры отражения посева по всей площади основного поля, соответственно, в красном и инфракрасном диапазонах, %;
p11-p27 - параметры модели; ε1(t), ε2(t) - случайные помехи в модели зондирующего измерителя, имеющие нулевые средние значения и дисперсии  ;
;
- векторно-матричное представление модели оптических измерений (4)

где: WT(Р,Х) - оператор модели; Е - матрица ошибок оптических измерений, имеющая ковариацию Σ.
В момент наступления начала очередного периода управления Ti оценки, полученные в блоке 28 -  , поступают на вход блока 29 и служат начальными условиями при формировании оптимальных норм полива и доз жидких минеральных удобрений, для чего используют алгоритм, минимизирующий критерий оптимальности по периодам управления:
, поступают на вход блока 29 и служат начальными условиями при формировании оптимальных норм полива и доз жидких минеральных удобрений, для чего используют алгоритм, минимизирующий критерий оптимальности по периодам управления:

где:  - вектор программы требуемого развития параметров посева по всем интервалам управления;
- вектор программы требуемого развития параметров посева по всем интервалам управления;  - прогнозное значение вектора параметров биомассы посева на конец (i+1) - го интервала управления.
- прогнозное значение вектора параметров биомассы посева на конец (i+1) - го интервала управления.
Этот алгоритм включает в себя следующие шаги:
Шаг 0. Устанавливают календарное время начала Ti и конца Ti+1 межфазового периода формирования урожая. Вводят оценку вектора параметров биомассы посева и влагосодержания почвы  , полученную в приборе 27, принимают циклическую переменную j=0 и задают начальные значения управлений: u1j - норма полива, т/га;
, полученную в приборе 27, принимают циклическую переменную j=0 и задают начальные значения управлений: u1j - норма полива, т/га;
u2j - доза азотной подкормки, кг/га, которые объединяются в вектор U(t)=U0. Принимают средние многолетние значения вектора климатических возмущений для данного времени года F(Ti, Ti+1).
Шаг 1. Решают систему  в прямом времени на интервале t ∈ (Ti, Ti+1), в результате чего получают векторный массив Xj(t).
в прямом времени на интервале t ∈ (Ti, Ti+1), в результате чего получают векторный массив Xj(t).
Шаг 2. Решают систему для сопряженной переменной:

в обратном времени на интервале t ∈ (Ti+1, Ti), в результате чего получают векторный массив Ψj(-t), который разворачивается во времени Ψj(t).
Шаг 3. Находят очередное приближение управлений:

Шаг 4. Принимают циклическую переменную j=j+1, осуществляется переход к шагу 1, вплоть до выполнения условия:
I(Ti, Ti+1)≤δ.
Информация о средних по площади поля оптимальных нормах полива и дозах жидких азотных удобрений с выхода блока 29 формирования средних по площади поля оптимальных норм полива и доз жидких азотных удобрений поступает на первый вход двухканального блока 30 локальной коррекции оптимальных норм полива и доз жидких азотных удобрений. На два других входа блока 30 поступает информация с выхода блока 32 усреднения данных дистанционного зондирования Земли, а через датчик 31 системы глобального позиционирования ГЛОНАСС - информация о данных оптического дистанционного зондирования, формируемых мультиспектральным прибором дистанционного зондирования 27. На основе поступающей информации в двухканальном блоке 30 локальной коррекции оптимальных норм полива и доз жидких азотных удобрений сначала корректируют оценки параметров состояния посева по элементарным участкам поля с пространственными координатами (z, h), представленные на фиг. 6 и 7:

а затем - вектор управлений, представленный на фиг. 8 и 9:

где:  - оценки векторов состояния посева для элементарных участков поля;
- оценки векторов состояния посева для элементарных участков поля;
Y(t, z, h) - вектор данных ДЗЗ по каждому элементарному участку поля;
K1, K2 - матрицы параметров корректора оценок параметров состояния посева и управлений.
С выхода многоканального блока 12 формирования оптимальных норм полива и доз жидких азотных удобрений сигналы поступают на задающие входы двухканальных локальных регуляторов 11 норм полива и доз жидких азотных удобрений.
В реальном времени после формирования многоканальным блоком 12 оптимальных норм полива и доз жидких азотных удобрений по всем элементарным участками U(z,h) многоопорную фронтальную дождевальную машину 1 устанавливают на поле в начальное положение, которому соответствует первая линия элементарных участков поля, попадающих в зону технологического захвата многоопорной фронтальной дождевальной машины 1. Одновременно с ее установкой в начальное положение включают двухканальные локальные регуляторы 11 норм полива и доз жидких азотных удобрений, с включением которых подаются пусковые сигналы на исполнительные механизмы 17 запорных клапанов 16 и электрические сервоприводы 24 индивидуальных управляемых дозаторов 19 жидких азотных удобрений. При этом одновременно открываются запорные клапаны 16 и перемещаются поршневые пары 22 индивидуальных управляемых дозаторов 19 жидких азотных удобрений, формируя дозы жидких азотных удобрений из распределительного трубопровода 10 через обратный клапан 21. За счет давления в напорном трубопроводе 14 вода через поливные трубопроводы 15 поступает на оросительные форсунки 4. Одновременно с этим электрические сервоприводы 24 развивают давление в индивидуальных управляемых дозаторах 19 жидких азотных удобрений, что приводит к закрытию обратных клапанов 21, открытию обратных клапанов 20 и поступлению жидких азотных удобрений в оросительные форсунки 4, через которые смесь воды и удобрений вносится на обслуживаемые элементарные участки поля. Общий расход воды в дождевальной машине 1 и поддержание требуемого напора в напорном трубопроводе 14 обеспечивается мобильной насосной станцией 5 путем забора воды из оросительного канала 7 посредством безнапорного шланга 8 и подачей ее через шланг 6 в напорный трубопровод 14. Расход воды в поливных трубопроводах 15 отдельных оросительных форсунок 4 измеряется расходомерами воды 18, сигналы которых поступают на первые сигнальные входы двухканальных локальных регуляторов 11 норм полива и доз жидких азотных удобрений. При равенстве сигналов расходомеров воды 18 с заданиями по нормам полива, формируемыми многоканальным блоком 12 формирования оптимальных норм полива и доз жидких азотных удобрений, а также - сигналов обратной связи электрических сервоприводов 24 с заданиями по дозам жидких азотных удобрений, формируемыми многоканальным блоком 12, двухканальные локальные регуляторы 11 отключают оросительные форсунки 4 путем закрытия запорных клапанов 16 и отключают электрические сервоприводы 24 индивидуальных управляемых дозаторов 19 жидких азотных удобрений. При закрытии последнего запорного клапана 16, что соответствует максимальной норме полива на отдельном элементарном участке, на блок 13 управления движением дождевальной машины подают пусковой сигнал, включающий управляемые тележки 3, за счет которых осуществляется перемещение многоопорной фронтальной дождевальной машины 1 на следующую линию элементарных участков, попадающих в зону ее технологического захвата. Контроль пространственного положения дождевальной машины 1 осуществляют датчиком 31 системы глобального позиционирования ГЛОНАСС. На каждой последующей линии элементарных участков на площади поля, попадающих в зону технологического захвата дождевальной машины 1, вплоть до последней линии, вся последовательность работы устройства повторяется.
В момент наступления начала очередного периода управления Ti+1 мультиспектральным прибором дистанционного зондирования 27 формируется новая информация о параметрах отражения посева по всей площади основного поля, поступающая на блок 28 оценивания параметров состояния посева и водозапаса почвы. Оценки, полученные в этом блоке, поступают на вход блока 29 формирования средних по площади поля оптимальных норм полива и доз жидких азотных удобрений и служат начальными условиями для формирования оптимальных норм полива и доз жидких азотных удобрений для нового интервала управления, когда повторяется вся последовательность работы устройства.
Одновременное формирование и реализация предлагаемым устройством оптимальных норм полива и доз внесения жидких удобрений в соответствии с оперативно оцениваемыми по данным дистанционного зондирования Земли параметрами состояния биомассы посева обеспечивает по сравнению с прототипом эффективное управление биомассой растений, что приводит к повышению урожайности сельскохозяйственных культур не менее, чем на 45-50% и получению дополнительной прибыли 12-15 тысяч рублей с каждого гектара поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2650534C2 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СОСТОЯНИЕМ ПОСЕВОВ | 2013 |
|
RU2537912C2 |
| СПОСОБ И УСТРОЙСТВО ОДНОВРЕМЕННОГО ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ СЫПУЧИХ АГРОХИМИКАТОВ И СЕВА | 2016 |
|
RU2643258C2 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ И ГЕРБИЦИДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2772889C1 |
| УСТРОЙСТВО И СПОСОБ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ СЫПУЧИХ АГРОХИМИКАТОВ | 2013 |
|
RU2554987C2 |
| Дождевальная машина | 2021 |
|
RU2768040C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ | 2011 |
|
RU2476067C2 |
| Устройство управления многоопорной дождевальной машиной | 1984 |
|
SU1175399A1 |
| Блочно-составная оросительная система для равнинно-склонной зоны | 2023 |
|
RU2801004C1 |
Изобретение относится к области сельского хозяйства и может быть использовано для орошения посевов сельскохозяйственных культур и одновременного внесения жидких минеральных удобрений. Устройство содержит многоопорную фронтальную дождевальную машину (1) с установленными на управляемых тележках (3) трубопроводами правого и левого крыльев машины с оросительными форсунками (4), мультиспектральный прибор дистанционного зондирования (27), базирующийся на беспилотном летательном аппарате (26), а также блок (13) управления движением дождевальной машины и многоканальный блок (12) формирования оптимальных норм полива, содержащий блок оценивания параметров состояния посева и водозапаса почвы, блок формирования средних по площади поля норм полива, блок локальной коррекции оптимальных норм полива, датчик системы глобального позиционирования ГЛОНАСС и блок усреднения данных дистанционного зондирования Земли. Оросительные форсунки оборудованы управляемыми запорными клапанами (16), локальными регуляторами (11) норм полива и расходомерами воды, последние подключены к входам локальных регуляторов норм полива, управляющие выходы которых подключены к исполнительным механизмам управляемых запорных клапанов, а сигнальные выходы - к блоку управления движением дождевальной машины. Выходы многоканального блока формирования оптимальных норм полива соединены с входами блока локальной коррекции оптимальных норм полива, выходы которого соединены с задающими входами локальных регуляторов норм полива. Многоопорная фронтальная дождевальная машина дополнительно оборудована емкостью для жидких азотных удобрений (9) и распределительным трубопроводом (10), а оросительные форсунки - индивидуальными управляемыми дозаторами (19) жидких азотных удобрений. Многоканальный блок формирования оптимальных норм полива дополнительно оборудован блоком определения оптимальных доз жидких азотных удобрений, блок локальной коррекции оптимальных норм полива - блоком локальной коррекции доз жидких азотных удобрений, а локальные регуляторы норм полива - локальными регуляторами доз жидких азотных удобрений. Индивидуальные управляемые дозаторы (19) жидких азотных удобрений, выполненные в виде поршневых пар с электрическими сервоприводами и встроенными датчиками положения, подключены к распределительному трубопроводу и поливным трубопроводам через обратные клапаны, а управляемые входы индивидуальных управляемых дозаторов жидких азотных удобрений соединены с выходами локальных регуляторов доз жидких азотных удобрений, входы которых связаны с датчиками положения электрических сервоприводов. Выход многоканального блока формирования оптимальных норм полива и доз жидких азотных удобрений соединен с входом двухканального блока локальной коррекции оптимальных норм полива и доз жидких азотных удобрений, выходы которого соединены с задающими входами локальных регуляторов норм полива и доз жидких азотных удобрений. Обеспечивается повышение урожайности сельскохозяйственных культур в среднем на 45-50% за счет эффективного управления биомассой растений. 9 ил.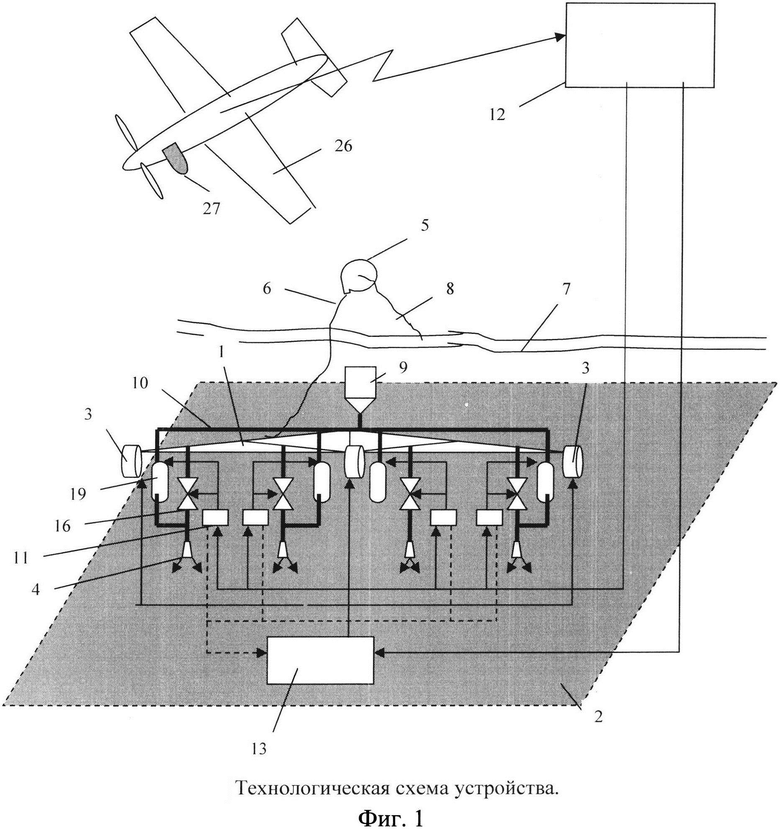
Устройство для дифференцированного управления орошением посевов с одновременным внесением жидких минеральных удобрений, включающее в себя многоопорную фронтальную дождевальную машину с установленными на управляемых тележках трубопроводами правого и левого крыльев машины с оросительными форсунками, мультиспектральный прибор дистанционного зондирования, базирующийся на беспилотном летательном аппарате, а также блок управления движением дождевальной машины и многоканальный блок формирования оптимальных норм полива, содержащий блок оценивания параметров состояния посева и водозапаса почвы, блок формирования средних по площади поля норм полива, блок локальной коррекции оптимальных норм полива, датчик системы глобального позиционирования ГЛОНАСС и блок усреднения данных дистанционного зондирования Земли, кроме этого оросительные форсунки оборудованы управляемыми запорными клапанами, локальными регуляторами норм полива и расходомерами воды, последние подключены к входам локальных регуляторов норм полива, управляющие выходы которых подключены к исполнительным механизмам управляемых запорных клапанов, а сигнальные выходы - к блоку управления движением дождевальной машины, при этом выходы многоканального блока формирования оптимальных норм полива соединены с входами блока локальной коррекции оптимальных норм полива, выходы которого соединены с задающими входами локальных регуляторов норм полива, отличающееся тем, что многоопорная фронтальная дождевальная машина дополнительно оборудована емкостью для жидких азотных удобрений и распределительным трубопроводом, а оросительные форсунки - индивидуальными управляемыми дозаторами жидких азотных удобрений, кроме того, многоканальный блок формирования оптимальных норм полива дополнительно оборудован блоком определения оптимальных доз жидких азотных удобрений, блок локальной коррекции оптимальных норм полива - блоком локальной коррекции доз жидких азотных удобрений, а локальные регуляторы норм полива - локальными регуляторами доз жидких азотных удобрений, при этом индивидуальные управляемые дозаторы жидких азотных удобрений, выполненные в виде поршневых пар с электрическими сервоприводами и встроенными датчиками положения, подключены к распределительному трубопроводу и поливным трубопроводам через обратные клапаны, а управляемые входы индивидуальных управляемых дозаторов жидких азотных удобрений соединены с выходами локальных регуляторов доз жидких азотных удобрений, входы которых связаны с датчиками положения электрических сервоприводов, причем выход многоканального блока формирования оптимальных норм полива и доз жидких азотных удобрений соединен с входом двухканального блока локальной коррекции оптимальных норм полива и доз жидких азотных удобрений, выходы которого соединены с задающими входами локальных регуляторов норм полива и доз жидких азотных удобрений.
| СПОСОБ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2650534C2 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| Автоматическая система импульсного дождевания | 1987 |
|
SU1521398A1 |
| Способ определения термического коэффициента линейного расширения материала | 1986 |
|
SU1413444A1 |

