Изобретение относится к области мелиорации сельского хозяйства, в частности к способам и техническим средствам для орошения посевов сельскохозяйственных культур.
Известен способ управления орошением посевов сельскохозяйственных культур, заключающийся в определении расчетной поливной нормы на основании информации о физических параметрах почвы, таких как γ - объемная масса почвы в расчетном слое, т/м3; hпр - расчетная глубина промачивания почвы, м; βнв - влажность почвы при наименьшей влагоемкости (НВ), % от сухой массы; βо - предполивная (допустимая) влажность почвы, % от сухой массы, и использовании расчетного соотношения
mпр=10γ⋅hпр⋅(βнв-βо),
где mпр - расчетная поливная норма, т/га; hпр - эмпирический расчетный слой, величина которого зависит от вида орошаемой культуры, состояния агрофона (фазы развития культуры и глубины распространения корневой системы), а также способа полива.
Расчетная поливная норма mпр является заданием для поливных машин и имеет одно и тоже значение по всей площади поля.
При этом для принятия решения о проведении полива с расчетной поливной нормой mпр измеряют такие метеопараметры, как интенсивность осадков, температуру воздуха, относительную влажность воздуха, скорость ветра на высоте 2 м, по этим параметрам определяют испаряемость влаги и суточное водопотребление в корнеобитаемом слое, по которым принимают решение о проведении полива (Ресурсосберегающие энергоэффективные экологически безопасные технологии и технические средства орошения: справ. - М.: ФГБНУ «Росинформагротех», 2015. - 264 с., стр. 42, 58).
Недостатками данного способа является то, что расчетная поливная норма определяется эмпирическим путем, на основании приближенных физических параметров, что приводит к большим ошибкам. Кроме того, пространственная неоднородность состояния посевов и почвы приводит к дополнительным локальным ошибкам в определении нормы полива. Серьезным недостатком такого способа является то, что принятие решения о проведении полива осуществляется только по метеорологическим параметрам, без учета состояния самого посева. Этот недостаток нарушает принцип оптимальности водного режима сельскохозяйственного поля, на котором все технологические операции, включая поливы, направлены на требуемое изменение состояния посева сельскохозяйственной культуры.
Наиболее близким по технической сущности к заявляемому изобретению в части способа является способ, включающий в себя измерение влажности почвы и метеорологических данных за период, предшествующий очередному поливу, учет гидрологических параметров почвы, математическую модель запасов почвенной влаги и модель прогнозирования межполивных периодов. При этом модель запасов почвенной влаги имеет следующий вид:
Wi=Wi-1+P-ETcrop(1-kg),
где Wi - оценка запасов почвенной влаги на момент проведения полива, Wi-1 - оценка запасов почвенной влаги на начало периода времени между поливами, т/га; P - атмосферные осадки за период времени между поливами, т/га; kg - коэффициент капиллярного подпитывания, ETcrop - водопотребление культуры за период между поливами, т/га;
а модель прогнозов интервалов времени между поливами имеет следующий вид:
 ,
,
где  - прогнозируемый интервал времени между поливами, сут; j - индексы поливов,
- прогнозируемый интервал времени между поливами, сут; j - индексы поливов,  - среднесуточное потребление влаги растениями, т/га; m - поливная норма, т/га; Wa - активные запасы почвенной влаги, которые могут использоваться растениями, т/га.
- среднесуточное потребление влаги растениями, т/га; m - поливная норма, т/га; Wa - активные запасы почвенной влаги, которые могут использоваться растениями, т/га.
При этом решение о проведении очередного полива в данном способе принимается по сопоставлению оценок почвенной влаги Wi с влагозапасом, соответствующим наименьшей влагоемкости почвы Wнв, а норма полива определяется по разности между ними m=Wнв-Wi. Указанная норма полива и моменты времени его проведения являются общими для всей площади поля (Бородычев В.В., Лытов М.Н. Алгоритм решения задачи управления водным режимом при орошении сельскохозяйственных культур. 2015, Мелиорация и водное хозяйство, №1. С. 8-11, прототип способа).
Недостатками данного способа является то, что в нем не обоснована оценка водопотребления культуры, как общего ETcrop за период между поливами, так и среднесуточного , что приводит к ошибкам в моделировании водозапаса почвы и в прогнозировании интервалов времени между поливами. Кроме того, в данном способе не учитывается состояние посева и динамика его развития, а также пространственная неоднородность состояния посева и почвенной среды. В совокупности эти недостатки приводят к потерям урожая, перерасходу воды и заболачиванию почвы.
Известно устройство для орошения посевов (дождевальная машина), включающее самоходные тележки с гидроприводом, дождевальные аппараты, стационарную опору с неподвижной трубой и поворотным коленом, регулирующий клапан. Дождевальные аппараты снабжены регуляторами расходных характеристик. Регулирующий клапан установлен на поворотном колене и снабжен штоком. Шток взаимодействует с направляющей канавкой программного устройства. Программное устройство закреплено на неподвижной трубе в виде диска. В теле диска размещена направляющая канавка, отражающая обратный профиль поля по фронту движения машины. Регуляторы расходных характеристик выполнены в виде гидроуправляемых клапанов (патент РФ №2432737 МПК A01G 25/09, от 10.11.2011). Такое исполнение устройства позволяет корректировать поливную норму с учетом рельефа поля.
Недостатками данного устройства является то, что в нем отсутствует блок определения нормы полива с учетом состояния почвы и посевов, а коррекция нормы полива по рельефу поля не учитывает пространственную неоднородность состояния посева и почвенной среды.
Наиболее близким по технической сущности к заявляемому устройству является устройство, включающее в себя блок автоматизированного управления многоопорной дождевальной машиной фронтального действия точного полива с установленными на тележках с электроприводом трубопроводами правого и левого крыльев машины, блоком синхронизации движения по курсу с направляющим тросом и блоком управления скоростью движения машины. Входы микропроцессорного блока управления соединены с таймером, системой стабилизации курса, системой синхронизации тележек в линию, датчиками пути, задатчиком нормы полива, задатчиком длины участка полива, расходомером и манометром, установленным на трубопроводе, а выходы микропроцессорного блока управления соединены с электрогидрозадвижкой, частотным преобразователем, контактором, приборами синхронизации тележек в линию и приборами стабилизации курса левого и правого крыльев, через вакуум-насос с входом насоса, выход которого через электрогидрозадвижку и расходомер соединен с трубопроводом. Микропроцессорный блок управления соединен с входом-выходом Интерфейсного устройства. Сигнал с выхода частотного преобразователя подается на электропривод левого и правого крыльев машины, а выход контактора соединен через электродвигатель с входом насоса. Сигнал, полученный с измерителей влажности, установленных на орошаемом участке поля, поступает на систему управления поливом через GLONASS-спутник, сигнал с системы управления поливом через GLONASS-спутник передается на вход-выход GLONASS-приемника, выход которого через блок анализа сигналов соединен с микропроцессорным блоком управления, выход которого соединен с GLONASS-приемником (патент РФ №2522526 МПК A01G 26/16, A01G 25/09, G01N 25/56 от 20.07.2014, прототип устройства).
Недостатками данного устройства являются: отсутствие блока определения заданной нормы полива, учитывающей состояние посева и почвенной среды и их целенаправленные изменения, наличие единой нормы полива по всей площади поля, при наличии пространственной неоднородности состояния посева и почвенной среды. Эти недостатки приводят к тому, что данное устройство не обеспечивает заданный влажностный режим посева, а также приводит к перерасходу воды и заболачиваю почвы, в тех местах, где поливная норма превышает оптимальное значение для данного типа почвы и текущих погодных условий.
Заявляемый способ дифференцированного управления орошением посевов решает задачу обеспечения заданного влажностного режима посевов сельскохозяйственных культур и повышение точности определения норм полива с учетом пространственной неоднородности посева и параметров почвенной среды.
Заявляемый способ дифференцированного управления орошением посевов, как и прототип, включает в себя измерение влажности почвы и метеорологических показателей за период, предшествующий очередному поливу, математические модели запасов почвенной влаги и определение поливных норм на основе математических моделей.
Заявляемый способ отличается от прототипа тем, что математическую модель динамики запаса почвенной влаги расширяют за счет включения в нее величины общей биомассы и сырой массы растений и дополняют моделью связи параметров биомассы растений с их оптическими показателями отражения, при этом параметры этих моделей оценивают предварительно, по данным дистанционного зондирования посевов и пробам, отбираемым с 10-12 тестовых площадок площадью 15-20 м2, расположенных рядом с основным полем. Кроме того, разбивают весь интервал вегетации культуры на равные промежутки времени между поливами, площадь поля разбивают на элементарные участки площадью 5-10 м2. При этом предварительно, в начале каждого заданного интервала времени между поливами посредством данных авиационного дистанционного зондирования и используемых математических моделей оценивают параметры биомассы и влагозапаса в почве на всех элементарных участках поля. По полученным оценкам для 20-25 элементарных участков посредством математической модели динамики биомассы и влагозапаса в почве определяют оптимальную среднюю норму полива и нормы поливов для отдельных элементарных участков, обеспечивающих достижение заданной относительной влажности биомассы посева в конце заданного интервала времени, для выбранных 20-25 элементарных участков. Определяют в начале интервала времени между поливами отклонения параметров биомассы и влагозапаса почвы от средних значений, по этим отклонениям посредством корректирующего регулятора норм полива вырабатывают поправки к средней норме полива и откорректированные нормы полива принимают в качестве заданий локальным регуляторам норм полива устройства для орошения, посредством которых включают и отключают оросительные форсунки с одновременным перемещением устройства для орошения на каждую очередную линию элементарных участков, попадающих в зону технологического захвата дождевальной машины, где операции способа для реального времени повторяются, а по истечении текущего интервала времени между поливами повторяют все операции способа для очередного полива.
При этом математическая модель динамики влагозапаса почвы и параметров биомассы в среднем по полю имеет следующий вид:

где X - вектор параметров состояния модели, компонентами которого являются: x1, x2, x3 - соответственно общая и сырая надземная масса растений, влагозапас почвы, кг/м2; F - вектор метеоусловий, компонентами которого являются: ƒ1 - среднесуточная температура воздушной среды, °С; ƒ2 - среднесуточный уровень радиации, Вт/(м2⋅час); ƒ3 - среднесуточный уровень осадков, мм (кг/м2); u(t) - интенсивность полива, кг/(м2⋅сут); Ξ(t) - вектор случайных помех в модели с компонентами: ζ1(t), ζ2(t) ζ3(t), имеющими нулевое среднее и дисперсии d1, d2, d3;  - динамическая матрица модели,
- динамическая матрица модели,
 - матрица-столбец передачи управления в модели,
- матрица-столбец передачи управления в модели,  - матрица передачи внешних возмущений в модели, a11-a33; b1-b3; c11-c33 - оцениваемые параметры модели, имеющие размерность сут-1; нули в матрицах обозначают отсутствие связи между переменными;
- матрица передачи внешних возмущений в модели, a11-a33; b1-b3; c11-c33 - оцениваемые параметры модели, имеющие размерность сут-1; нули в матрицах обозначают отсутствие связи между переменными;
модель оптических показателей отражения имеет следующий вид:

где Y - вектор оптических показателей отражения с компонентами:
y1м - оптический показатель, полученный по первому каналу измерения (в видеодиапазоне); y2м - оптический показатель, полученный по второму каналу измерения (в инфракрасном диапазоне); W(P, X) - вектор-функция модели, имеющая следующий вид:
 ,
,
p11-p27 - параметры оптической системы измерений, оцениваемые по экспериментальным данным; ε1(t), ε2(t) - случайные помехи в модели зондирующего измерителя, имеющие нулевое среднее и дисперсии  ,
,  ;
;
алгоритм оценивания состояния посева и влагозапаса почвы по данным дистанционного зондирования на основании моделей (1), (2) имеет следующий вид:

где - оценка вектора состояния посевов и водозапаса почвы,
- оценка вектора состояния посевов и водозапаса почвы,  - матрица дисперсий помех в модели состояния посевов и водозапаса почвы,
- матрица дисперсий помех в модели состояния посевов и водозапаса почвы,  - матрица ошибок измерения, Р - матрица ошибок оценивания
- матрица ошибок измерения, Р - матрица ошибок оценивания
 - матрица частных производных вектор-функции модели измерений по вектору состояния модели состояния посевов и водозапаса почвы.
- матрица частных производных вектор-функции модели измерений по вектору состояния модели состояния посевов и водозапаса почвы.
модель корректирующего регулятора норм полива имеет следующий вид:

где Δu(t, h, z) - корректирующие поправки норм полива для элементарного участка с пространственными координатами (h, z),  - оценка среднего значения по площади поля вектора состояния модели,
- оценка среднего значения по площади поля вектора состояния модели,  - оценка вектора состояния модели для элементарного участка с координатами (h, z), K - матрица параметров корректирующего регулятора;
- оценка вектора состояния модели для элементарного участка с координатами (h, z), K - матрица параметров корректирующего регулятора;
критерий оптимизации норм полива имеет следующий вид:

где  - заданное значение относительной влажности биомассы посева, Tj - моменты времени проведения j-го полива.
- заданное значение относительной влажности биомассы посева, Tj - моменты времени проведения j-го полива.
Заявляемое устройство дифференцированного управления орошением посевов решает задачу обеспечения заданного влажностного режима посевов сельскохозяйственных культур и повышения точности воспроизводства оптимальных норм полива с учетом пространственной неоднородности посева и параметров почвенной среды.
Заявляемое устройство, как и прототип, включает в себя блок автоматизированного управления многоопорной дождевальной машиной фронтального действия точного полива с установленными на тележках с электроприводом трубопроводами правого и левого крыльев машины с оросительными форсунками, входы блока автоматизированного управления соединены с задатчиком нормы полива, а выходы блока управления соединены с электрогидрозадвижкой, при этом измеритель влажности, установленный на орошаемом участке поля, подключен к системе управления поливом через приемник системы ГЛОНАСС, выход которого через блок анализа сигналов соединен с микропроцессорным блоком управления.
Заявляемое устройство отличается от прототипа тем, что в него введен мультиспектральный прибор дистанционного зондирования, базирующийся на беспилотном летательном аппарате, а также многоканальный блок формирования оптимальных норм полива и блок управления движением дождевальной машины. Кроме того, оросительные форсунки дождевальной машины оборудованы управляемыми запорными клапанами, расходомерами и локальными регуляторами норм полива. При этом расходомеры воды подключены к входам локальных регуляторов норм полива, управляющие выходы которых подключены к исполнительным механизмам управляемых запорных клапанов, а сигнальные выходы - к блоку управления движением дождевальной машины. Причем блок формирования оптимальных норм полива содержит базу данных оптических показателей отражения посева, блок идентификации математических моделей, блок оценивания состояния посева и водозапаса почвы, блок оптимизации норм полива, блок локальной коррекции норм полива, блок формирования заданий локальным регуляторам норм полива, приемник системы глобального позиционирования ГЛОНАСС, блок хранения данных о реальном состоянии посева и почвенной среды. К входу базы данных оптических показателей отражения посева подключен мультиспектральный прибор дистанционного зондирования и приемник системы глобального позиционирования ГЛОНАСС. Выход базы данных оптических показателей отражения посева соединен с входом блока идентификации математических моделей, входом блока оценивания состояния посева и водозапаса почвы, входом блока локальной коррекции норм полива и входом блока управления движением дождевальной машины. К входу блока идентификации математических моделей также подключен блок хранения данных о фактическом состоянии посева и почвенной среды. Выход блока идентификации математических моделей соединен с входами блока оценивания состояния биомассы и водозапаса почвы и блока оптимизации норм полива. Выход блока оценивания состояния посева и водозапаса почвы соединен с входами блока оптимизации норм полива, блока локальной коррекции норм полива и блока формирования заданий локальных регуляторов норм полива. Выход блока оптимизации норм полива соединен с входами блока локальной коррекции норм полива и блока формирования заданий локальным регуляторам норм полива. Выход блока локальной коррекции норм полива соединен с входом блока формирования заданий локальным регуляторам норм полива, выходы которого соединены с задающими входами локальных регуляторов норм полива.
При этом для реализации заявляемого способа математическая модель состояния посева и водозапаса почвы имеет следующий вид:

где Xт=[x1 х2 х3] - вектор состояния модели, с компонентами: х1 - общая надземная масса растений, кг/м2; х2 - сырая надземная масса растений, кг/м2; х3 - влагозапас почвы, кг/м2; Fт=[ƒ1 ƒ2 ƒ3] - вектор внешних климатических возмущений, с компонентами: ƒ1 - среднесуточная температура воздушной среды, °С; ƒ2 - среднесуточный уровень радиации, Вт/(м2⋅час); ƒ3 - среднесуточный уровень осадков, мм (кг/м2); u(t) - норма полива, кг/м2; Ξт(t)=[ζ1(t), ζ2(t), ζ3(t)] - случайные помехи в модели, имеющие нулевое среднее и дисперсии d1, d2, d3;  - динамическая матрица модели,
- динамическая матрица модели,  - матрица управления модели,
- матрица управления модели,  - матрица возмущений модели, a11-a33; b1-b3; c11-c33 - оцениваемые параметры модели, имеющие размерность сут-1; нули в матрицах обозначают отсутствие связи между переменными.
- матрица возмущений модели, a11-a33; b1-b3; c11-c33 - оцениваемые параметры модели, имеющие размерность сут-1; нули в матрицах обозначают отсутствие связи между переменными.
математическая модель оптического измерения состояния посевов посредстовм дистанционного зондирования имеет следующий вид:

где - вектор-функция модели,  - вектор параметров отражения посева с компонентами: y1 - оптический показатель отражения в инфракрасном диапазоне, y2 - оптический показатель отражения в красном диапазоне;
- вектор параметров отражения посева с компонентами: y1 - оптический показатель отражения в инфракрасном диапазоне, y2 - оптический показатель отражения в красном диапазоне; - вектор случайных ошибок измерения, имеющие нулевое среднее и дисперсии
- вектор случайных ошибок измерения, имеющие нулевое среднее и дисперсии  ,
,  .
.
Алгоритм оценивания состояния посева и водозапаса почвы по данным дистанционного зондирования на основании моделей (1), (2) имеет следующий вид:
где  - оценка вектора состояния посевов и водозапаса почвы,
- оценка вектора состояния посевов и водозапаса почвы,  - матрица дисперсий помех в модели состояния посевов и водозапаса почвы,
- матрица дисперсий помех в модели состояния посевов и водозапаса почвы,  - матрица ошибок измерения, Р - матрица ошибок оценивания.
- матрица ошибок измерения, Р - матрица ошибок оценивания.
 - матрица частных производных вектор-функции модели измерений по вектору состояния модели состояния посевов и водозапаса почвы.
- матрица частных производных вектор-функции модели измерений по вектору состояния модели состояния посевов и водозапаса почвы.
Локальную коррекцию норм полива по площади поля производят по модели корректирующего регулятора следующего вида

где Δuj(Tj, z, h) - поправка на норму полива для любого элементарного участка поля с координатами (z, h),  - средняя по площади поля оценка начальных условий состояния посева и водозапаса почвы в начале j-го интервала полива,
- средняя по площади поля оценка начальных условий состояния посева и водозапаса почвы в начале j-го интервала полива,  - оценка начальных условий состояния посева и водозапаса почвы для любого элементарного участка поля с координатами (z, h), К - матрица параметров модели.
- оценка начальных условий состояния посева и водозапаса почвы для любого элементарного участка поля с координатами (z, h), К - матрица параметров модели.
Критерий оптимизации норм полива имеет следующий вид:
где - заданное значение относительной влажности биомассы посева, Tj - моменты времени проведения j-го полива.
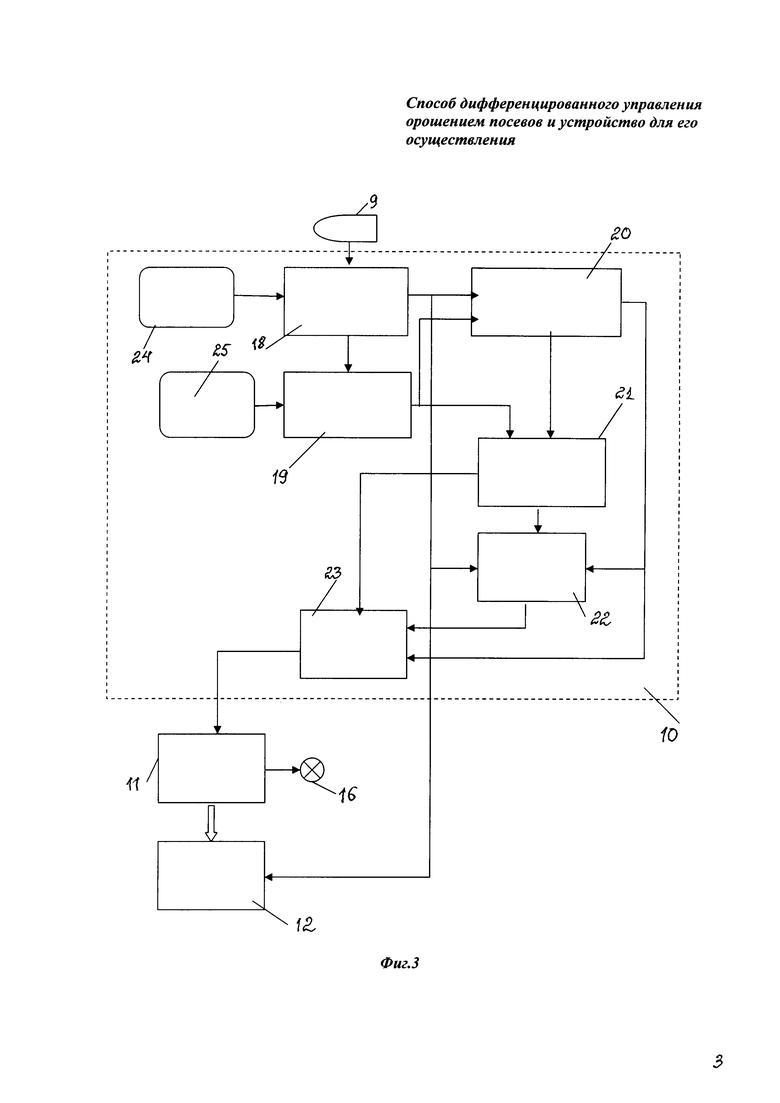
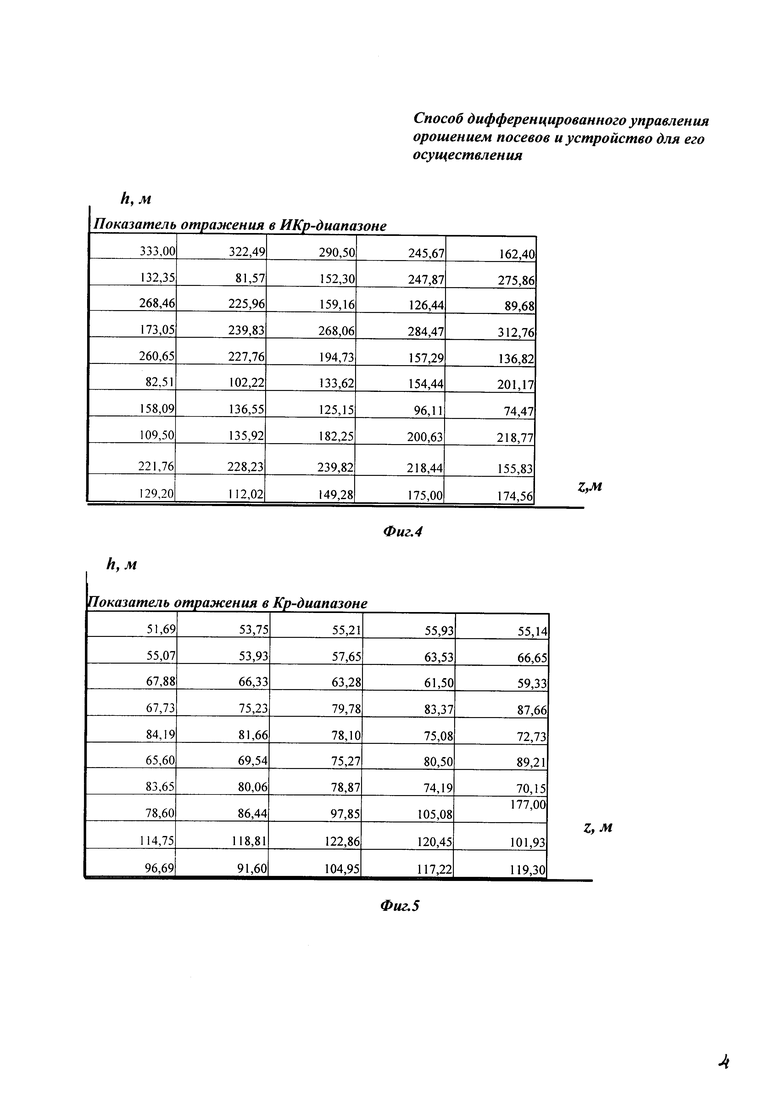
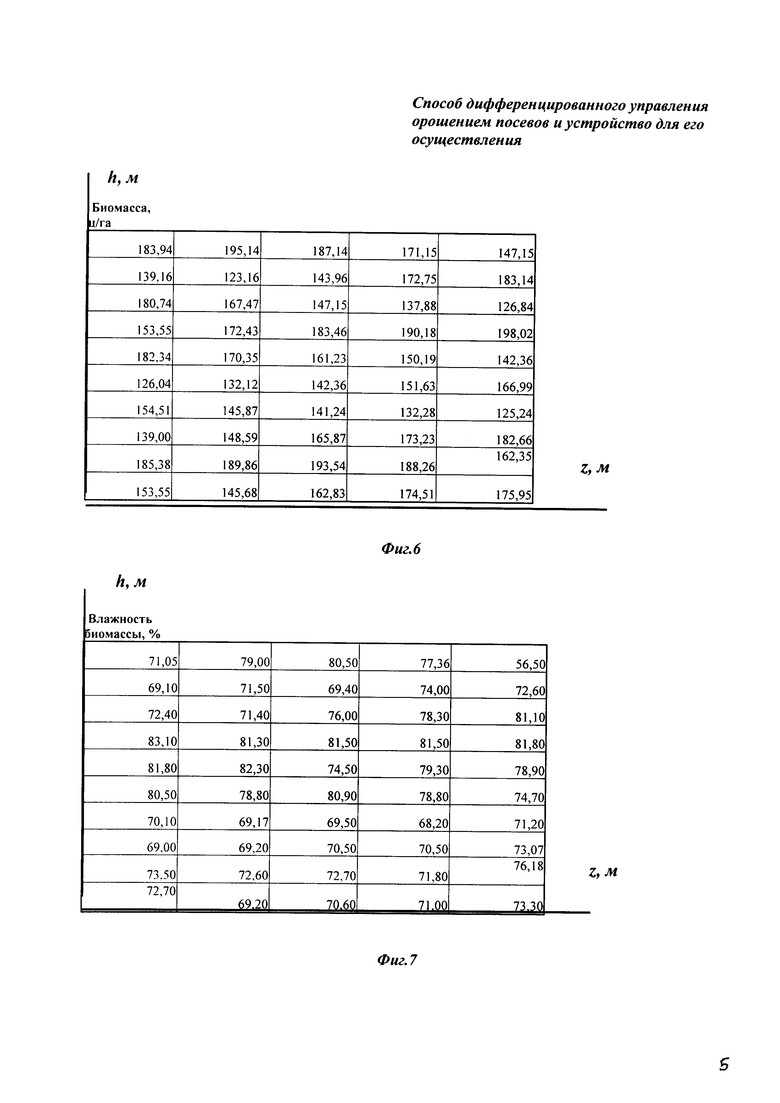
На фиг. 1 представлена технологическая схема заявляемого устройства управления орошением, на фиг. 2 - схема подключения оросительных форсунок, на фиг. 3 - алгоритмическая схема реализации заявляемого способа управления орошением, на фиг. 4 - фрагмент распределения по площади поля показателя отражения в инфракрасном диапазоне посева многолетних трав для примера реализации способа, на фиг. 5 - фрагмент распределения по площади поля показателя отражения в красном диапазоне посева многолетних трав для примера реализации способа, на фиг. 6 - фрагмент распределения оценок биомассы посева многолетних трав для примера реализации способа, на фиг. 7 - фрагмент распределения по площади поля оценок относительной влажности биомассы многолетних трав для примера реализации способа, на фиг. 8 - фрагмент распределения по площади поля оптимальных норм полива.
Устройство содержит фронтальную дождевальную машину 1, перемещающуюся по полю посредством управляемых тележек 2 и оборудованную оросительными форсунками 3, расположенными равномерно по длине машины 1 (фиг. 1). Давление и расход воды в дождевальной машине обеспечивается мобильной насосной станцией 4 через напорный шланг 5. Забор воды мобильной насосной станцией осуществляется из оросительного канала 6 посредством безнапорного шланга 7. Для оценивания состояния посева и влагозапаса в почве используется беспилотный летательный аппарат 8 с размещенным на нем мультиспектральным прибором дистанционного зондирования 9. Устройство содержит многоканальный блок формирования оптимальных норм полива 10, связанный с прибором дистанционного зондирования 9 радиомодемной связью. Каждая оросительная форсунка оборудована локальным регулятором норм полива 11, задающие входы которых соединены с блоком формирования оптимальных норм полива 10. Управление тележками 2 дождевальной машины осуществляется блоком управления движением 12, сигнальный вход которого соединен с выходом блока формирования оптимальных норм полива 10, а пусковой вход - с сигнальными выходами локальных регуляторов норм полива 11.
Оросительные форсунки 3 крепятся к напорному трубопроводу 13 дождевальной машины 1 посредством трубопровода 14, на котором установлены запорные клапаны 15 с исполнительными механизмами 16, а также расходомеры воды 17. Расходомеры подключены к входам локальных регуляторов норм полива 11, управляющие выходы которых соединены с исполнительными механизмами 16 запорных клапанов 15 (фиг. 2).
Блок формирования оптимальных норм полива 10 содержит базу данных оптических показателей отражения посева 18, блок идентификации математических моделей 19, блок оценивания состояния посева и водозапаса почвы 20, блок оптимизации норм полива 21, блок локальной коррекции норм полива 22 и блок формирования заданий локальным регуляторам 23, приемник системы глобального позиционирования ГЛОНАСС 24 и блок хранения данных о реальном состоянии посева и почвенной среды 25 (фиг. 3). К входу базы данных оптических показателей отражения посева 18 подключен мультиспектральный прибор дистанционного зондирования 9, приемник системы глобального позиционирования ГЛОНАСС 24. Выход базы данных оптических показателей отражения посева 18 соединен с входом блока идентификации математических моделей 19, входом блока оценивания состояния посева и водозапаса почвы 20, входом блока локальной коррекции норм полива 22 и входом блока управления движением 12 дождевальной машины 1. К входу блока идентификаций математических моделей 19 также подключен блок хранения данных о фактическом состоянии посева и почвенной среды 25. Выход блока идентификации математических моделей соединен с входами блока Оценивания состояния биомассы и водозапаса почвы 20 и блока оптимизации норм полива 21. Выход блока оценивания состояния посева и водозапаса почвы 20 соединен с входами блока оптимизации норм полива 21, блока локальной коррекции норм полива 22 и блока формирования заданий локальных регуляторов норм полива 11. Выход блока оптимизации норм полива 21 соединен с входами блока локальной коррекции норм полива 22 и блока формирования заданий локальным регуляторам норм полива 23. Выход блока локальной коррекции норм полива 22 соединен с входом блока формирования заданий локальным регуляторам норм полива 23, выходы которого соединены с задающими входами локальных регуляторов норм полива 11.
Заявляемый способ осуществляется следующим образом.
Шаг 1. Предварительно, до момента проведения первого полива j=1, по данным дистанционного зондирования, формируемым мультиспектральным прибором 9 и накапливаемым в базе данных 18 и данным о реальном состоянии посевов и почвенной среды, получаемым по пробам, отбираемым с 10-12 тестовых площадок площадью 1,5-2,0 м2 и хранящимся в блоке 25, в блоке идентификации математических моделей 19 оценивают параметры моделей (1), (2). Весь интервал вегетации культуры разбивают на интервалы между отдельными поливами. Задают требуемую относительную влажность биомассы посева  и допустимую величину критерия оптимальности (5) - I*.
и допустимую величину критерия оптимальности (5) - I*.
Шаг 2. На интервале времени, предшествующем первому поливу j=1, (Т0, Т1), посредством летательного аппарата 8 и мультиспектрального прибора дистанционного зондирования 9 формируют оперативные снимки посева сельскохозяйственной культуры. На фиг. 4, 5 представлен пример таких снимков в таблично-цифровой форме для двух спектральных диапазонов: инфракрасного и красного, полученных для посева многолетних трав. Здесь единицей измерения является масштабированный показатель спектрального отражения в заданных диапазонах.
Шаг 3. На основе полученных спектральных снимков посредством алгоритма (3) в блоке 20 формируют начальные условия состояния посевов и водозапаса почвы на всех элементарных участках поля, координаты которых обозначаются переменными (z, h). На фиг. 6 показан пример построения оценок общей биомассы посева многолетних трав, а на фиг. 7 - оценки относительной влажности биомассы. Выделяют оценки на 20-25 элементарных участках, которые усредняют. Средние значения  и локальные значения
и локальные значения  оценок состояния посева и водозапаса почвы по этим участкам поступают в блок оптимизации норм полива 21. В блоке 21 принимают начальные значения среднего по этим элементарным участкам значения нормы полива u0 и локальные начальные значения норм полива u0(z, h), которые вместе с прогнозными значения внешних климатических возмущений F вводят в модели состояния посева и водозапаса почвы для каждого выбранного элементарного участка с координатами (z, h)
оценок состояния посева и водозапаса почвы по этим участкам поступают в блок оптимизации норм полива 21. В блоке 21 принимают начальные значения среднего по этим элементарным участкам значения нормы полива u0 и локальные начальные значения норм полива u0(z, h), которые вместе с прогнозными значения внешних климатических возмущений F вводят в модели состояния посева и водозапаса почвы для каждого выбранного элементарного участка с координатами (z, h)

которые решают на интервале времени, в начале которого осуществляется первый полив (T0, T1).
По полученным решениям в конце интервала времени (T1) вычисляют критерий оптимальности (5) для среднего значения начальных условий - Ij=1 и для каждого локального значения начальных условий - Ij=1(z, h), которые сравнивают с допустимой величиной I*. Если вычисленные текущие значения критериев Ij=1 или Ij=1(z, h) меньше допустимого значения, то текущее значение нормы полива u0 или u0(z, h) принимается в качестве оптимального uj* или uj*(z, h) и процедуру оптимизации для этого варианта останавливают. В противном случае переходят к следующему шагу оптимизации.
Шаг 4. Решают модели для сопряженной переменной в обратном времени (-t), для чего концы интервала времени меняют местами (Т1, Т0)
 , t∈(T1,T0),
, t∈(T1,T0),
решение разворачивают в прямом времени и фиксируют в начале интервала времени Λ(T0, z, h).
Шаг 5. Уточняют среднюю по площади поля и локальные нормы полива по следующей итерационной процедуре

u(T1, z, h)i+1=u(T1, z, h)i-Δi(Λт(T1, z, h)b).
Осуществляют переход к шагу 3 по каждому варианту, вплоть до достижения сходимости. Полученные значения средних по выбранным 20-25 элементарным участкам поля оптимальных норм полива uj* поступают в блок локальной коррекции норм полива 22 и в блок формирования заданий локальным регуляторам 23. Полученные локальные значения оптимальных нор полива uj*(z, h) поступают в блок локальной коррекции норм полива 22.
Шаг 6. В блоке локальной коррекции норм полива 22 определяют отклонения локальных оценок начальных условий состояния посева и водозапаса почвы от среднего значения для выбранных 20-25 элементарных участков

и отклонения локальных от средних значений оптимальных норм полива
 ,
,
и по полученным данным уточняют параметры модели корректирующего регулятора норм полива (4).
Шаг 7. В реальном времени, по данным дистанционного зондирования, формируемых мультиспектральным прибором 9, накапливаемых в базе данных 18 в начале j-го интервала полива посредством алгоритма (3) в блоке 20 формируют оценки состояния посевов и водозапаса почвы на элементарных участках, попадающих в зону технологического захвата дождевальной машины 1, которые поступают в блок формирования заданий локальным регуляторам 23. В блоке 23 формируются локальные поправки норм полива  ,
,
которые складываются со средними значениями оптимальных норм полива
 ,
,
и полученные значения норм полива являются заданиями локальным регуляторам 11. На фиг. 8 представлено распределение оптимальных норм полива по площади поля для примера реализации способа для посева многолетних трав.
Шаг 8. После отработки локальных регуляторов 11, которые включают и отключают локальные оросительные форсунки 3, производят перемещение дождевальной машины на новую линию элементарных участков, попадающих в зону захвата дождевальной машины 1, после чего все операции реального времени повторяют.
Шаг 9. По истечении интервала времени между поливами, осуществляют переход к следующему интервалу времени j=j+1 и все операции способа по пп. 1-9 повторяют.
Устройство, реализующее заявляемый способ орошения, работает следующим образом.
Предварительно, перед началом работы на основе спектральной информации, формируемой посредством беспилотного летательного аппарата 8 с установленным на нем мультиспектральным прибором дистанционного зондирования 9 и проб, отбираемых с тестовых площадок, в блоке формирования оптимальных норм полива 10 формируют задания локальным регуляторам норм полива 11. В реальном времени дождевальную машину 1 устанавливают на поле в начальное положение, которому соответствует первая линия элементарных участков поля, попадающих в зону технологического захвата дождевальной машины 1. Одновременно с установкой дождевальной машины 1 в начальное положение включают локальные регуляторы норм полива 11. С включением локальных регуляторов норм полива 11 подаются пусковые сигналы на исполнительные механизмы 16, и запорные клапаны 15 отрываются. За счет давления в напорном трубопроводе 13 вода через трубопроводы 14 поступает на оросительные форсунки 3. Общий расход воды в дождевальной машине и поддержание требуемого напора в напорном трубопроводе 13 обеспечивается мобильной насосной станцией 4 путем забора воды из оросительного канала 6 посредством безнапорного шланга 4 и подачей ее через шланг 5 в напорный трубопровод 13. Расход воды в трубопроводах 14 измеряется расходомерами 17, сигналы которых поступают на сигнальные входы локальных регуляторов норм полива 11. При равенстве сигналов расходомеров 17 с заданиями, формируемыми блоком формирования оптимальных норм полива, локальные регуляторы норм полива отключают оросительные форсунки 3 путем закрытия запорных клапанов 15. При закрытии последнего запорного клапана 15, что соответствует максимальной норме полива на отдельном элементарном участке, на блок управления движением 12 подается пусковой сигнал, включающий ходовые тележки 2, за счет которых осуществляется перемещение дождевальной машины 1 на следующую линию элементарных участков, попадающих в зону технологического захвата. Контроль пространственного положения дождевальной машины 1 осуществляется приемником системы пространственного позиционирования ГЛОНАСС 24 и базой данных 18. На каждой последующей линии элементарных участков на площади поля, попадающих в зону технологического захвата дождевальной машины 1, вплоть до последней, вся последовательность работы устройства повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИФФЕРЕНЦИРОВАННОГО УПРАВЛЕНИЯ ОРОШЕНИЕМ ПОСЕВОВ С ОДНОВРЕМЕННЫМ ВНЕСЕНИЕМ ЖИДКИХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ | 2019 |
|
RU2726542C1 |
| Роботизированный способ управления поливом дождевальными машинами кругового или фронтального действия | 2022 |
|
RU2796845C1 |
| СПОСОБ И УСТРОЙСТВО ОДНОВРЕМЕННОГО ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ СЫПУЧИХ АГРОХИМИКАТОВ И СЕВА | 2016 |
|
RU2643258C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СОСТОЯНИЕМ ПОСЕВОВ | 2013 |
|
RU2537912C2 |
| СПОСОБ ОДНОВРЕМЕННОГО ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ ЖИДКИХ МИНЕРАЛЬНЫХ УДОБРЕНИЙ И ГЕРБИЦИДОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2772889C1 |
| УСТРОЙСТВО И СПОСОБ ДИФФЕРЕНЦИРОВАННОГО ВНЕСЕНИЯ СЫПУЧИХ АГРОХИМИКАТОВ | 2013 |
|
RU2554987C2 |
| Способ возделывания кукурузы на зерно | 1987 |
|
SU1554818A1 |
| СПОСОБ ВОЗДЕЛЫВАНИЯ КУКУРУЗЫ НА ЗЕРНО ПРИ МЕЛКОДИСПЕРСНОМ ОРОШЕНИИ | 1998 |
|
RU2129766C1 |
| Способ полива дождеванием | 1987 |
|
SU1556591A1 |
| Дождевальная машина для прецизионного орошения | 2023 |
|
RU2814260C1 |



Группа изобретений относится к области сельского хозяйства и может использоваться при орошении посевов. Способ дифференцированного управления орошением посевов включает измерение влажности почвы и метеорологических показателей, анализ математической модели запасов почвенной влаги и определение поливных норм. Математическая модель динамики запаса почвенной влаги включает величину общей биомассы и сырой массы растений и дополнена моделью связи параметров биомассы растений с их оптическими показателями отражения. Параметры биомассы и влагозапаса в почве на всех элементарных участках поля оценивают посредством данных авиационного дистанционного зондирования и используемых математических моделей. На основе полученных параметров определяют оптимальную среднюю норму полива и нормы поливов для отдельных элементарных участков. Устройство для дифференцированного управления орошением посевов содержит мультиспектральный прибор дистанционного зондирования, многоканальный блок формирования оптимальных норм полива и блок управления движением дождевальной машины. Прибор дистанционного зондирования базируется на беспилотном летательном аппарате. Оросительные форсунки дождевальной машины оборудованы управляемыми запорными клапанами, расходомерами и локальными регуляторами норм полива. Обеспечивается заданный влажностный режим посевов. Повышается точность определения норм полива. 2 н. и 5 з.п. ф-лы, 8 ил.
1. Способ дифференцированного управления орошением посевов, включающий в себя измерение влажности почвы и метеорологических показателей за период, предшествующий очередному поливу, математические модели запасов почвенной влаги и определение поливных норм на основе математических моделей, отличающийся тем, что математическую модель динамики запаса почвенной влаги расширяют за счет включения в нее величины общей биомассы и сырой массы растений и дополняют моделью связи параметров биомассы растений с их оптическими показателями отражения, при этом параметры этих моделей оценивают предварительно, по данным дистанционного зондирования посевов и пробам, отбираемым с 10-12 тестовых площадок площадью 15-20 м2, расположенных рядом с основным полем, кроме того, разбивают весь интервал вегетации культуры на равные промежутки времени между поливами, площадь поля разбивают на элементарные участки площадью 5-10 м2, при этом предварительно, в начале каждого заданного интервала времени между поливами, посредством данных авиационного дистанционного зондирования и используемых математических моделей оценивают параметры биомассы и влагозапаса в почве на всех элементарных участках поля, по полученным оценкам для 20-25 элементарных участков посредством математической модели динамики биомассы и влагозапаса в почве определяют оптимальную среднюю норму полива и нормы поливов для отдельных элементарных участков, обеспечивающих достижение заданной относительной влажности биомассы посева в конце заданного интервала времени, для выбранных 20-25 элементарных участков определяют отклонения начальных значений параметров биомассы и влагозапаса в почве и норм полива от средних значений по данным участкам, и на основании этих отклонений оценивают параметры линейной модели корректирующего регулятора норм полива, используемого для всех элементарных участков поля, в реальном времени на всех элементарных участках поля, попадающих в зону технологического захвата дождевальной машины, определяют в начале интервала времени между поливами отклонения параметров биомассы и влагозапаса почвы от средних значений, по этим отклонениям посредством корректирующего регулятора норм полива вырабатывают поправки к средней норме полива и откорректированные нормы полива принимают в качестве заданий локальным регуляторам норм полива устройства для орошения, посредством которых включают и отключают оросительные форсунки с одновременным перемещением устройства для орошения на каждую очередную линию элементарных участков, попадающих в зону технологического захвата дождевальной машины, где операции способа для реального времени повторяют, а по истечении текущего интервала времени между поливами повторяют все операции способа для очередного полива.
2. Устройство для дифференцированного управления орошением посевов, включающее в себя блок автоматизированного управления многоопорной дождевальной машиной фронтального действия точного полива с установленными на тележках с электроприводом трубопроводами правого и левого крыльев машины с оросительными форсунками, входы блока автоматизированного управления соединены с задатчиком нормы полива, а выходы блока управления соединены с электрогидрозадвижкой, при этом измеритель влажности, установленный на орошаемом участке поля, подключен к системе управления поливом через приемник системы ГЛОНАСС, выход которого через блок анализа сигналов соединен с микропроцессорным блоком управления, отличающееся тем, что в него введен мультиспектральный прибор дистанционного зондирования, базирующийся на беспилотном летательном аппарате, а также многоканальный блок формирования оптимальных норм полива и блок управления движением дождевальной машины, кроме того, оросительные форсунки дождевальной машины оборудованы управляемыми запорными клапанами, расходомерами и локальными регуляторами норм полива, при этом расходомеры воды подключены к входам локальных регуляторов норм полива, управляющие выходы которых подключены к исполнительным механизмам управляемых запорных клапанов, а сигнальные выходы к блоку управления движением дождевальной машины, причем блок формирования оптимальных норм полива содержит базу данных оптических показателей отражения посева, блок идентификации математических моделей, блок оценивания состояния посева и водозапаса почвы, блок оптимизации норм полива, блок локальной коррекции норм полива, блок формирования заданий локальным регуляторам норм полива, приемник системы глобального позиционирования ГЛОНАСС, блок хранения данных о реальном состоянии посева и почвенной среды, при этом к входу базы данных оптических показателей отражения посева подключен мультиспектральный прибор дистанционного зондирования и приемник системы глобального позиционирования ГЛОНАСС, выход базы данных оптических показателей отражения посева соединен с входом блока идентификации математических моделей, входом блока оценивания состояния посева и водозапаса почвы, входом блока локальной коррекции норм полива и входом блока управления движением дождевальной машины, к входу блока идентификации математических моделей также подключен блок хранения данных о фактическом состоянии посева и почвенной среды, выход блока идентификации математических моделей соединен с входами блока оценивания состояния биомассы и водозапаса почвы и блока оптимизации норм полива, выход блока оценивания состояния посева и водозапаса почвы соединен с входами блока оптимизации норм полива, блока локальной коррекции норм полива и блока формирования заданий локальных регуляторов норм полива, выход блока оптимизации норм полива соединен с входами блока локальной коррекции норм полива и блока формирования заданий локальным регуляторам норм полива, выход блока локальной коррекции норм полива соединен с входом блока формирования заданий локальным регуляторам норм полива, выходы которых соединены с задающими входами локальных регуляторов норм полива.
3. Способ по п. 1, отличающийся тем, что математическая модель динамики влагозапаса почвы и параметров биомассы в среднем по полю имеет следующий вид:

где X - вектор параметров состояния модели, компонентами которого являются: х1, x2, х3 - соответственно общая и сырая надземная масса растений, влагозапас почвы, кг/м2; F - вектор метеоусловий, компонентами которого являются: f1 - среднесуточная температура воздушной среды, °С; f2 - среднесуточный уровень радиации, Вт/(м2⋅час); f3 - среднесуточный уровень осадков, мм (кг/м2); u(t) - интенсивность полива, кг/м2;  - вектор случайных помех в модели с компонентами: ζ1(t), ζ2(t) ζ3(t), имеющими нулевое среднее и дисперсии d1, d2, d3;
- вектор случайных помех в модели с компонентами: ζ1(t), ζ2(t) ζ3(t), имеющими нулевое среднее и дисперсии d1, d2, d3;  - динамическая матрица модели,
- динамическая матрица модели,  - матрица-столбец передачи управления в модели,
- матрица-столбец передачи управления в модели, 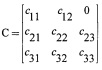 - матрица передачи внешних возмущений в модели, а11-а33; b1-b3; с11-с33 - оцениваемые параметры модели.
- матрица передачи внешних возмущений в модели, а11-а33; b1-b3; с11-с33 - оцениваемые параметры модели.
4. Способ по п. 1, отличающийся тем, что модель оптических показателей отражения имеет следующий вид:

где Y - вектор оптических показателей отражения с компонентами:
у1м - оптический показатель, полученный по первому каналу измерения (в видеодиапазоне); у2м - оптический показатель, полученный по второму каналу измерения (в инфракрасном диапазоне); W(P,X) - вектор-функция модели, имеющая следующий вид:

р11-р27 - параметры оптической системы измерений, оцениваемые по экспериментальным данным; ε1(t), ε2(t) - случайные помехи в модели зондирующего измерителя, имеющие нулевое среднее и дисперсии ,  ,
,  .
.
5. Способ по пп. 1, 3, 4, отличающийся тем, что алгоритм оценивания состояния посева и водозапаса почвы по данным дистанционного зондирования на основании моделей (1), (2) имеет следующий вид:

где  - оценка вектора состояния посевов и водозапаса почвы,
- оценка вектора состояния посевов и водозапаса почвы,  - матрица дисперсий помех в модели состояния посевов и водозапаса почвы,
- матрица дисперсий помех в модели состояния посевов и водозапаса почвы,  - матрица ошибок измерения, Р - матрица ошибок оценивания
- матрица ошибок измерения, Р - матрица ошибок оценивания  - матрица частных производных вектор-функции модели измерений по вектору состояния модели состояния посевов и водозапаса почвы.
- матрица частных производных вектор-функции модели измерений по вектору состояния модели состояния посевов и водозапаса почвы.
6. Способ по пп. 1, 5, отличающийся тем, что локальную коррекцию норм полива по площади поля производят по модели корректирующего регулятора следующего вида

где Δuj(Tj,z,h) - поправка на норму полива для любого элементарного участка поля с координатами (z,h),  - средняя по площади поля оценка начальных условий состояния посева и водозапаса почвы в начале j-го интервала полива,
- средняя по площади поля оценка начальных условий состояния посева и водозапаса почвы в начале j-го интервала полива,  - оценка начальных условий состояния посева и водозапаса почвы для любого элементарного участка поля с координатами (z,h), К - матрица параметров модели.
- оценка начальных условий состояния посева и водозапаса почвы для любого элементарного участка поля с координатами (z,h), К - матрица параметров модели.
7. Способ по пп. 1, 3, отличающийся тем, что критерий оптимизации норм полива имеет следующий вид:

где  - заданное значение относительной влажности биомассы посева, Tj - моменты времени проведения j-го полива.
- заданное значение относительной влажности биомассы посева, Tj - моменты времени проведения j-го полива.
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СОСТОЯНИЕМ ПОСЕВОВ | 2013 |
|
RU2537912C2 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНОЙ ФРОНТАЛЬНОГО ДЕЙСТВИЯ ДЛЯ ТОЧНОГО ПОЛИВА | 2012 |
|
RU2522526C1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА | 2010 |
|
RU2432737C1 |
| Устройство управления дождевальной машиной | 1985 |
|
SU1271407A1 |
| CN 203675790 U, 02.07.2014. | |||

