Изобретение относится к контрольно-измерительной технике и метрологии и может быть использовано для дистанционной поверки пьезоэлектрических приемников, состоящих из инерционной массы и электрически соединенных пьезоэлемента и усилителя, в натурных условиях.
Известен способ аналогичного назначения, согласно которому возбуждают пьезоэлектрический гидрофон нормированным электрическим сигналом последовательно на частотах, составляющих рабочий диапазон гидрофона, путем подачи от внешнего генератора синусоидального напряжения замещения гидроакустического давления гидрофона, полученного в результате измерения падения напряжения на резисторе, включенном относительно пьезоэлектрической части гидрофона на землю и находящемся во векторном усилителе, возбужденного при первичной поверке заданным значением гидроакустического давления на заданной частоте (Патент РФ №2439841, кл. H04R 29/00, 2012 г.).
Недостатком аналога является ограниченность его применения лишь случаем контроля состояния электрического тракта пьезоэлектрических приемников без определения других важнейших характеристик приемника, например, коэффициента преобразователя поверяемого приемника, коэффициент передачи усилителя, коэффициента добротности поверяемого приемника и т.д.
Известны способы аналогичного назначения, реализуемые в гидрофонах и векторном приемнике, заключающиеся в подаче тестового сигнала на усилитель через пьезоэлемент поверяемого приемника, расположенного на своем штатном месте, и измерении отклика этого приемника на подаваемый тестовый сигнал, по величине которого судят о значении коэффициента преобразования поверяемого приемника (Патент РФ №88236, кл. H04R 1/44, 2009; Патент РФ №2393643, кл. H04R 1/44, 2010; Патент РФ №88237, кл. H04R 1/44, 2009).
В прототипе в качестве испытуемого приемника выступает векторный приемник, состоящий из инерционной массы (ИМ) и электрически соединенных пьезоэлемента и усилителя. Причем в качестве ИМ в прототипе выступает непосредственно биморфный элемент (если бы в качестве прототипа выступал сферический гидрофон, то в качестве ИМ в нем выступал бы сферический корпус).
В состав поверяемого приемника также входит конденсатор с емкостью, равной электрической емкости пьезоэлемента. Конденсатор может дистанционно подсоединяться ко входу усилителя вместо пьезоэлемента. Это позволяет периодически контролировать целостность и герметичность приемника без его демонтажа непосредственно в натурных условиях и всего лишь судить о значении коэффициента преобразования его предусилителя.
Недостатком прототипа является невозможность дистанционного определения коэффициента М преобразования приемника и других его метрологических характеристик для проведения периодической поверки виброакустических преобразователей непосредственно в натурных условиях.
Техническим результатом, получаемым от внедрения изобретения, является устранение недостатка прототипа, т.е. получение возможности определения основных метрологических характеристик поверяемого приемника дистанционно в натурных условиях.
Данный технический результат достигается за счет того, что в известном бездемонтажном способе поверки виброакустических приемников, состоящих из инерционной массы и электрически соединенных пьезоэлемента и усилителя, заключающемся в подаче тестового сигнала на усилитель через пьезоэлемент поверяемого приемника, расположенного на своем штатном месте, и измерении отклика этого приемника на подаваемый тестовый сигнал, по величине которого судят о значении коэффициента преобразования поверяемого приемника, в качестве усилителя поверяемого приемника применяют усилитель заряда, а в качестве тестового сигнала задают синусоидальный сигнал с монотонно изменяющейся частотой f, при этом последовательно определяют значения резонансной fp и антирезонансной fa частот поверяемого приемника, а коэффициент М преобразования поверяемого приемника определяют из формулы:

где 
- динамический коэффициент электромеханической связи поверяемого приемника; A - постоянная приемника; N - коэффициент передачи усилителя поверяемого приемника через его пьезоэлемент.
Коэффициент N передачи усилителя поверяемого приемника через его пьезоэлемент определяют путем подачи на усилитель заряда через пьезоэлемент напряжения Uвх и измерения выходного напряжения Uвых приемника, при этом коэффициент N определяют по формуле:

Постоянная A приемника определяется по формуле:

где m - инерционная масса поверяемого приемника; Cос - емкость отрицательной обратной связи усилителя заряда поверяемого приемника.
Постоянная приемника A определяется предварительно в лабораторных условиях по формуле:

где M - коэффициент преобразования приемника на частоте f, определенный на эталонной виброустановке при первичной поверке.
Дополнительно измеряют напряжения Umax и Umin, соответствующие значениям резонансной fp и антирезонансной fa, частот и определяют коэффициент QM механической добротности поверяемого приемника по формуле:
После определения коэффициента QM механической добротности поверяемого приемника отбраковывают как не прошедшие поверку приемники со значением QM<30.
Изобретение поясняется чертежами.
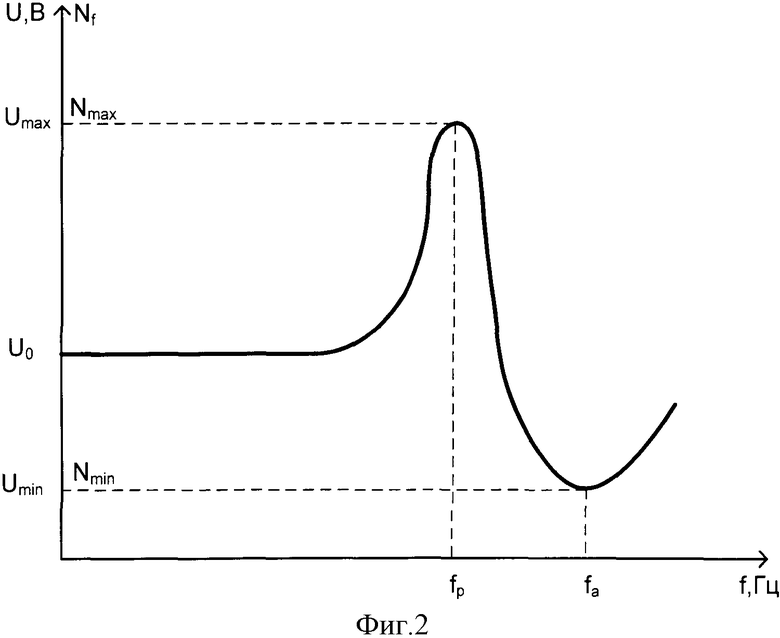
На фиг.1 представлена схема устройства для реализации способа; на фиг.2 - частотная диаграмма для пояснения работы устройства.
Устройство содержит электрически соединенные пьезоэлемент 1, представленный в виде последовательно соединенных генератора и конденсатора, и усилитель 2 заряда (или предусилитель 2 заряда), представленный в виде операционного усилителя ОУ, охваченного отрицательной обратной связью посредством конденсатора емкости Сос.
Пьезоэлемент 1 выполнен с возможностью дистанционной подачи на него через кабель синусоидального тестового сигнала от генератора 3 через тумблер 4.
При этом на входе пьезоэлемента возникает синусоидальный тестовый сигнал Uвх(f), а на выходе усилителя 2 заряда - сигнал отклика Uвых(f) поверяемого приемника.
Принцип реализации способа описывается моделью высокодобротной колебательной системы с одной степенью свободы, представляющей собой инерционную массу m на пружине жесткостью k, опертой на основание, на которое действует ускорение 
Возникающая при этом сила инерции деформирует пьезоэлемент (на модели - пружину), в результате чего на обкладках пьезоэлемента, электрическая емкость которого -C, возникает электрическое напряжение U.
Для рассматриваемой модели справедливы соотношения ([1] Механика связанных полей в элементах конструкций. Т.5. Электроупругость. Гришина В.Т. и др. Ин-т механики. Киев. Наукова думка. 1989. ISBN-5-12-000378-8, стр. 135-137).

где x - деформация пружины; EM - потенциальная энергия.

где Eэ - энергия конденсатора.

где ω0 - собственная частота.

где Fu - сила инерции.

- закон Гука,
где Fn - сила реакции пружины.

- закон Ньютона,
откуда 

- динамический коэффициент электромеханической связи по определению [1].

- формула У. Мэзона.

- коэффициент преобразования пьезоэлемента при разомкнутых электродах.

- имеет место при разомкнутых электродах пьезоэлемента.

где сос - емкость обратной связи ОУ, UГ - напряжение генератора на частоте f, Uвых - напряжение на выходе приемника.
Характер зависимости N=N(f) от частоты приведен на рис.2 [2].

где М - коэффициент преобразования приемника.
откуда

где 
Для случая распределенной массы и неоднородной деформации пьезоэлемента постоянная приемника А определяется при первичной поверке из (22)

где M - коэффициент преобразования приемника на частоте f, определяемый на эталонной виброустановке при первичной поверке.
Коэффициент QМ механической добротности определяется по формуле (6) ([2] «Справочник по гидроакустике». А.П. Евтюков, А.Е. Колесников и др. 2-е изд. - Л.: Судостроение, 1988, стр. 296-299).
При реализации способа с помощью генератора 3 через тумблер 4 на пьезоэлемент 1 подают синусоидальный тестовый сигнал в диапазоне рабочих частот f при неизменной амплитуде, например, 0,5 В.
Находят резонансную fp и антирезонансную fa частоты, при которых напряжения на выходе Uвых приемника достигают соответственно значений Umax и Umin.
Затем определяются динамический коэффициент Kd электромеханической связи, коэффициент M преобразования и коэффициент QM механической добротности по математическим соотношениям (2), (1), (6).
При этом если определенный по формуле (6) коэффициент Qm механической добротности будет меньше 30, то поверяемый приемник отбраковывается несмотря на результаты, полученные при определении М. Поскольку в этом случае формулы (1), (2) будут некорректны с погрешностью 2% из-за несовершенства принятой модели.
Таким образом, бездемонтажный способ поверки виброакустических приемников позволяет в натурных условиях определить коэффициент М преобразования в зависимости от частоты, динамический коэффициент Kd электромеханической связи и коэффициент QM механической добротности поверяемого приемника и по найденным значениям М, Kd и QM судить о его метрологическом и техническом состоянии.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗДЕМОНТАЖНОЙ ПОВЕРКИ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ВИБРОПРЕОБРАЗОВАТЕЛЯ НА МЕСТЕ ЭКСПЛУАТАЦИИ | 2012 |
|
RU2524743C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ГИДРОАКУСТИЧЕСКОГО ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2493543C2 |
| ЦИФРОВОЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ЭЛЕМЕНТОВ | 2014 |
|
RU2584719C1 |
| Способ контроля качества пьезоэлектрических преобразователей | 1986 |
|
SU1394169A1 |
| СПОСОБ ДИСТАНЦИОННОГО ПЕРИОДИЧЕСКОГО КОНТРОЛЯ КОЭФФИЦИЕНТА ПРЕОБРАЗОВАНИЯ ПЬЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА | 2000 |
|
RU2176396C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2023 |
|
RU2829570C1 |
| СПОСОБ ПОВЕРКИ МАГНИТОИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ | 1990 |
|
RU2010257C1 |
| Способ бездемонтажной поверки технического термоэлектрического преобразователя и устройство для его осуществления | 1987 |
|
SU1471089A1 |
| Способ абсолютной градуировки излучающих и приемных электроакустических преобразователей антенного блока акустического доплеровского профилографа течений | 2023 |
|
RU2821706C1 |
| СПОСОБ ИЗМЕРЕНИЯ МОЩНОСТИ ГИДРОАКУСТИЧЕСКОГО ИЗЛУЧАТЕЛЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2492431C1 |
Изобретение относится к контрольно-измерительной технике и может быть использовано для дистанционной поверки пьезоэлектрических приемников. Способ контроля заключается в подаче на дистанционные приемники, состоящие из инерционной массы, пьезоэлемента и усилителя заряда, от генератора синусоидальных колебаний тестовых сигналов различной частоты и определении отклика приемника. Затем осуществляется определение резонансной и антирезонансной частот, при которых выходной сигнал приемника достигает соответственно максимального и минимального значений. По величинам измеренных частот и коэффициента передачи усилителя определяют коэффициент преобразования приемника, динамический коэффициент электромеханической связи и коэффициент механической добротности поверяемого приемника. При этом тестовый сигнал имеет монотонно изменяющуюся частоту, а постоянная приемника определяется основе инерционной массы поверяемого приемника и емкости отрицательной связи усилителя заряда поверяемого приемника. После определения коэффициента механической добротности приемники отбраковывают при условии, что величина добротности меньше 30. Технический результат - расширение функциональных возможностей за счет обеспечения дистанционного контроля пьезоприемников. 5 з.п. ф-лы, 2 ил.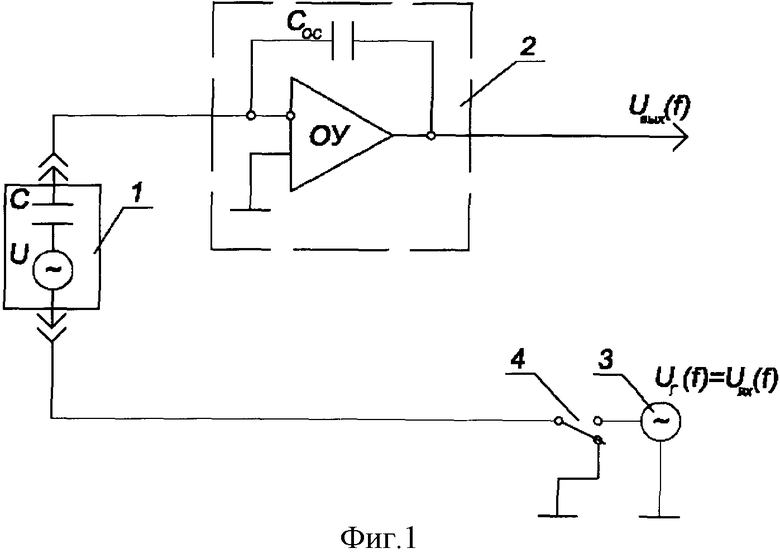
1. Бездемонтажный способ поверки виброакустических приемников, состоящих из инерционной массы и электрически соединенных пьезоэлемента и усилителя, заключающийся в подаче тестового сигнала на усилитель через пьезоэлемент поверяемого приемника, расположенного на своем штатном месте, и измерении отклика этого приемника на подаваемый тестовый сигнал, по величине которого судят о значении коэффициента преобразования поверяемого приемника, отличающийся тем, что в качестве усилителя поверяемого приемника применяют усилитель заряда, а в качестве тестового сигнала задают синусоидальный сигнал с монотонно изменяющейся частотой f, при этом последовательно определяют значения резонансной fp и антирезонансной fa частот поверяемого приемника, а коэффициент М преобразования поверяемого приемника определяют из формулы:
 ,
,
где  - динамический коэффициент электромеханической связи поверяемого приемника; A - постоянная приемника; N - коэффициент передачи усилителя поверяемого приемника через его пьезоэлемент.
- динамический коэффициент электромеханической связи поверяемого приемника; A - постоянная приемника; N - коэффициент передачи усилителя поверяемого приемника через его пьезоэлемент.
2. Бездемонтажный способ по п.1, отличающийся тем, что коэффициент N передачи усилителя поверяемого приемника через его пьезоэлемент определяют путем подачи на усилитель заряда через пьезоэлемент напряжения Uвх и измерения выходного напряжения Uвых приемника, при этом коэффициент N определяют по формуле:

3. Бездемонтажный способ по п.1, отличающийся тем, что постоянная A приемника определяется по формуле:
где m - инерционная масса поверяемого приемника; Сос - емкость отрицательной обратной связи усилителя заряда поверяемого приемника.
4. Бездемонтажный способ по п.1, отличающийся тем, что постоянная приемника А определяется предварительно в лабораторных условиях по формуле:
 ,
,
где M - коэффициент преобразования приемника на частоте f, определенный на эталонной виброустановке при первичной поверке.
5. Бездемонтажный способ по п.1, отличающийся тем, что дополнительно измеряют напряжения Umax и Umin, соответствующие значениям резонансной fp и антирезонансной fa частот, и определяют коэффициент QM механической добротности поверяемого приемника по формуле:
6. Бездемонтажный способ по п.5, отличающийся тем, что после определения коэффициента QM механической добротности поверяемого приемника отбраковывают как не прошедшие поверку приемники со значением QM<30.
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ГИДРОФОННОГО ТРАКТА В НАТУРНЫХ УСЛОВИЯХ И ГИДРОФОННЫЙ ТРАКТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2450479C1 |
| US 6698269 B2, 02.03.2004 | |||
| US 4467271 A1, 21.08.1984 | |||
| СПОСОБ ПОВЕРКИ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ВИБРОПРЕОБРАЗОВАТЕЛЯ БЕЗ ДЕМОНТАЖА С ОБЪЕКТА КОНТРОЛЯ | 2007 |
|
RU2358244C1 |
| CH 569263 A5, 14.11.1975 | |||
| JP 2005526228 A1, 02.09.2005 | |||
| Вертикальный вальцерезный станок | 1926 |
|
SU15261A1 |

