ел, со
4ik
Oi СО

| название | год | авторы | номер документа |
|---|---|---|---|
| Измеритель коэффициента электромеханической связи пьезоэлектрических элементов | 1985 |
|
SU1248081A2 |
| ЦИФРОВОЙ СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ЭЛЕМЕНТОВ | 2014 |
|
RU2584719C1 |
| Устройство для неразрушающегоКОНТРОля КАчЕСТВА пьЕзОэлЕМЕНТОВ | 1979 |
|
SU801319A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ ПАРАМЕТРОВ ПЬЕЗОЭЛЕКТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2023 |
|
RU2829570C1 |
| Устройство для измерения усилий | 1983 |
|
SU1164562A1 |
| Пьезоэлектрический преобразователь | 1989 |
|
SU1748292A1 |
| ГРАДИЕНТОМЕТР | 2019 |
|
RU2724461C1 |
| Способ определения пьезомодулей | 1991 |
|
SU1800406A1 |
| Пьезоэлектрический приемник низкочастотной вибрации | 2021 |
|
RU2778373C1 |
| РЕЗОНАНСНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР ТОКА НА ОСНОВЕ ЭФФЕКТА КАЗИМИРА | 2014 |
|
RU2577767C2 |

Изобретение относится к виброизмерительной технике и может быть использовано, например, для автоматической проверки соответствия акселерометров требованиям технических условий при их серийном выпуске. Цель изобретения - расширение функциональных возможностей - достигается за счет определения чувствительности - пьезоэлектрического преобразователя. Устройство, реализуннцее способ, содержит генератор 1 синусоидальных сигналов, соединенный с частотомером 2 и через ключ 3 с усилителем мощности 4. К выходу усилителя подключены последовательно соединенные пьезо- преобразователь 5 и резистор 6. На чертеже также показаны коммутатор 7, измерительный блок 8 и блок 9 управления. Способ предусматривает выполнение девяти измерительных операций, а качество контролируемого преобразователя определяют по расчетной математической формуле, приведенной в описании изобретения. 4 ил. § (Л
C 3i/2j
113
Изобретение относится к виброизмерительной технике и может быть использовано, в частности, для автоматической проверки соответствия акселерометров требованиям технических условий при их серийном и массовом выпуске.
Цель изобретения - расширение функциональных возможностей за счет определения чувствительности пьезо- электрического преобразователя.
На фиг.1 приведено устройство, реализующее способ,- на фиг.2 - механическая схема виброприемника, состоящего из основания, пьезоэлемента и инерционного элемента; на фиг.З - эквийалентная электромеханическая схема виброприемника; на фиг.4 - эквивалентная электрическая схема виброприемника (акселерометра) для случая подачи на его вход электричес
кого напряжения U(t)U..
(pt
+ ip ) и отсутствия Возбуждения на его механическом входе.
Устройство (фиг; 1) содержит гене-- ратор 1 синусоидальных сигналов, соединенный с частотомером 2 и через КЛЮЧ 3 с усилителем 4 мощности, к вы I ходу которого подключены последова- 1тельно соединенные пьезопреобразова- Iтель 5 и резистор 6, коммутатор 7, измерительный блок 8 и блок 9 управления .
Сущность способа заключается в слдующем.
Рассмотрим виброприемник, состоящий из основания, пьезоэлемента и инерционного элемента. Известно,что перечисленные узлы могут ,быть представлены в виде эффективных масс m,m (основания и инерционной.соответственно) , упругости К и сопротивлния потерь г. В принятых обозначениях механическая схема виброприемника показана на фиг.2 (а - ускорение, действующее на вход виброприемника) Запишем уравнения электромеханического преобразования для пьезоэлемента, выбрав в качестве переменньпс напряжение U на его электрической стороне и скорость V сох (со - частота, X - изменение размера пьезоэлемента) на механической стороне:
j
CflU
+ Nv;
+ г) V, (1) где I - ток на электрической стороне i
NU .(--.
/-1
F - сила на механическом входе, Г емкость пьезоэлемента (акселерометра) при V 0; аффективная гибкость пьезоэлемента J ,,
Мп коэффициент электромеханического преобразования. При возбуждении на частоте о) виброприемника со стороны основания ускорением а и силой F для пьезоэлемента выполняются следующие граничные условия:
а - а, 5
F
F ,(2)
где
г - ускорение инерционной массы.
Из уравнений (1) с учетом (2) получаем систему уравнений, описывающую виброприемник как электромеханический четырехполюсник, на механическом и электрическом
действуют F ветственно:
и а,, и
NU
Ш
а - )
I
jwc.u + N S-Sr,
Вводя идеальньп электромеханический трансформатор с коэффициентом трансформации N,, получаем эквивалентную электромеханическую схему виброприемника, приведенную на фиг.З, где приняты следующие обозначения:
С. R гАГ,- Ц L m./N -,
где Сд, R, L,Lj, - электрические аналоги соответствующих механических величин С, г, m,tnp.
Из анализа эквивалентной схемы следует, что для коэффициента преоб- раэования (чувствительности) X (оо1 виброприемника справедливо соотношение
частота виброприемника при
его возбуждении с механической стороны.
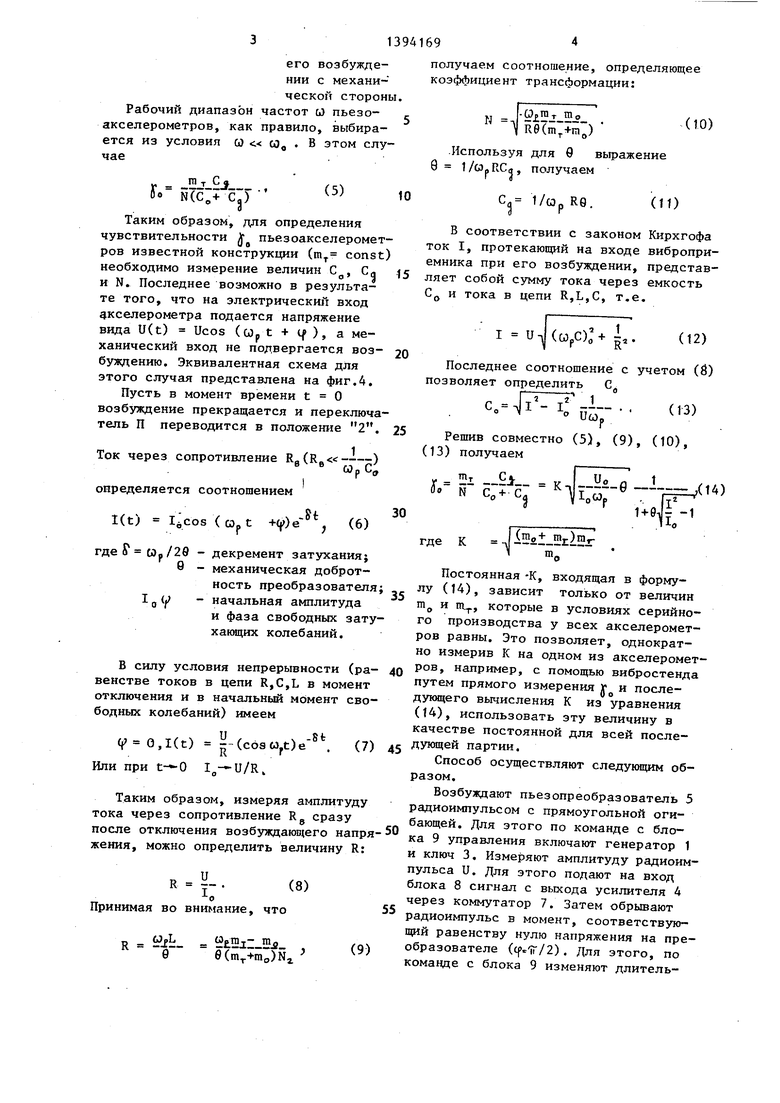
Рабочий диапазон частот о) пьезо- , акселерометров, как правило, выбирается из условия 0) сОо . В этом случае
(C
.-Cj)
(5)
Таким образом, для определения чувствительности А пьезоакселеромет- ров известной конструкции (т const)
необходимо измерение величин С
1
и N. Последнее возможно в результате того, что на электрический вход акселерометра подается напряжение вида U(t) Ucos (сОр t + if ), а механический вход не подвергается воз- булотению. Эквивалентная схема для этого случая представлена на фиг.4.
Пусть в момент времени t О возбуждение прекращается и переключатель П переводится в положение 2.
Ток через сопротивление Rg(Rg«-)
Up L,
определяется соотношением
tf l(t) l6cos(c0pt +(p)e-°% (6)
где f CO /29 - декремент затухания; 9 - механическая добротность преобразователя Ig у - начальная амплитуда
и фаза свободных затухающих колебаний.
В силу условия непрерывности (ра- венстве токов в цепи R,C,L в момент отключения и в начальный момент свободных колебаний) имеем
С O.Kt) -(c6sы,t)e (7) Или при 1„-U/R,
Таким образом, измеряя амплитуду тока через сопротивление R сразу после отключения возбуждаюп(его напря жения, можно определить величину R:
R У- .(8)
0
Принимая во внимание, что
JjL
б e(,)Ni
получаем соотношение, определяющее коэффициент трансформации:
N ,E™ZiZ. (10) 1ке(т,-ьт„)
.Используя для Q выражение 9 l/CJpRCa, получаем
О
10
С. 1/(Ор R0.
(to
15
20
В соответствии с законом Кирхгофа ток I, протекающий на входе виброприемника при его возбзткдении, представляет собой сумму тока через емкость Сд и тока в цепи R,L,C, т.е.
U-J(WpC) ,.
1
(12)
Последнее соотношение с учетом (S) позволяет определить С.
с. иБ7
(13)
Решив совместно (5), (9), (10), (13) получаем
:i4)
где К
: 112в1 5 г1Шг 1 т„
4045
0
55
Постоянная -К, входящая в формулу (14), зависит только от величин т и т, которые в условиях серийного производства у всех акселерометров равны. Это позволяет, однократно измерив К на одном из акселерометров, например, с помощью вибростенда путем прямого измерения у и последующего вычисления К из уравнения (14), использовать зту величину в качестве постоянной для всей последующей партии.
Способ осуществляют следующим образом.
Возбуждают пьезопреобразователь 5 радиоимпульсом с прямоугольной огибающей. Для этого по команде с блока 9 управления включают генератор 1 и ключ 3. Измеряют амплитуду радиоимпульса и. Для этого подают на вход блока 8 сигнал с выхода усилителя 4 через коммутатор 7. Затем обрывают радиоимпульс в момент, соответствующий равенству нулю напряжения на преобразователе (с| с1Г/2) . Для этого, по комацде с блока 9 изменяют длительнрсть радиоимпульса и фиксируют с по- мрщью блока 8 фазу напряжения на преобразователе. При выполнении условия CJ « /2 (переход напряжения через 0) блок 9 вьщает сигнал, запирающий 3, и возбуждение преобразователя прекращается.
Далее устанавливают частоту за- г:олнения радиоимпульса сЭр . Для этого на вход блока 8 через коммутатор 7 ггодают сигнал с резистора 6 (RB i 1/03pC), прбпорцйональньй току короткого замыкания. В блоке 8 прово- Аится определение амплитуды тока IQ начале переходного процесса. По ко- нанде с блока 9 в генераторе 1 про- 1сходит изменение частоты генерируемых колебания, и процедура измере- дия величины 1, повторяется. В мо- чент, когда зафиксирован максимум 1о, изменение частоты сигнала в генераторе 1 прекращается. I Для измерения частоты сОрСИгнал с частотомера 2 подается в блок 8.За- |Тем измеряют амплитуду тока 1 (Протекающего через преобразователь во время действия радиоимпульсов, и амп- |литуду.тока начале переходного процесса, возникающего после прекра- щения действия радиоимпульса, i Для определения механической доб- ротности преобразователя б с помощью блока 8 измеряют скорость затухания переходного процесса.
Значение постоянной способа К для партии испытуеьфгх преобразователей измеряется заранее и заносится в память блока 8. ,
В соответствии с формулой (14) определяют чувствительность /р преобразователя и делают вывод о его качестве. Формула изобретения
Способ контроля качества пьезо-
электрических преобразователей, сог
ласно которому в преобразователе возбуждают механические колебания путем подачи на его электроды радиоимпульса с прямоугольной огибающей и частотой заполнения, равной частоте его механического резонанса, и измеряют параметры возникающего переходного процесса, отличающийся тем, что, с целью расширения функциональных возможностей за счет определения чувствительности пьезоэлектрического преобразователя, измеряют амплитуду тока возбуждения, возбуждение прерывают в момент равенства нулю мгновенного значения напряжения на электродах преобразователя , электроды замыкают и измеряют амплитуду тока в начале переходного процесса путем измерения падения напряжения на сопротивлении К 1/ЫрХ X Сд , где сОр - частота механического резонанса, статическая емкость резонатора, измеряют величину механической добротности, а о качестве преобразователя судят по величине чувствительности, определяемой по формуле
К
1
- :ж-ти - амплитуда напряжения радиоимпульса возбуждения; 1 - амплитуда тока возбуждения
преобразователя; Ig - амплитуда тока в начале
переходного процесса; 9 - механическая добротность,
К 1 JSai-HJiLSi
m.
дд
45
где тй - масса основания;
т - инерционная масса преобразователя.
r.H С г
0-1, г-IIи
ПГ т
i/cos()
Цзиг2
г
/770
и
I I
фиг.з
Cf
0
| Колесников A.J | |||
| Акустические измерения.-Л;: Судостроение, 1983, с | |||
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Способ неразрушающего контроля качества пьезоэлементов | 1977 |
|
SU716135A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
