Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству хранения средства обращения, например, к автоматическому устройству кассовых операций для работы с банкнотами в качестве средства обращения.
Уровень техники
Обычно, известным автоматическим устройством кассовых операций для выполнения внесения/снятия банкнот в ответ на операцию потребителя является, например, рециркуляционный тип автоматического устройства кассовых операций, который обеспечивает последующее использование внесенных банкнот путем обеспечения возможности их снятия. Рециркуляционный тип автоматического устройства кассовых операций раскрыт, например, в японской патентной выложенной публикации, номер 2011-134222, в которой, при внесении, когда пользователь вставляет банкноту в отверстие внесения/снятия банкнот в секции обслуживания потребителя, вставленная банкнота проверяется посредством устройства проверки, и затем банкнота, признанная после проверки как обычная банкнота, сохраняется во временном хранилище, тогда как другая банкнота, не определенная как та, которую можно использовать для расчетов, возвращается в отверстие внесения/снятия банкнот и возвращается пользователю.
Временное хранилище обеспечивается барабаном, имеющим шаговый двигатель, чтобы перемещать банкноты, приходящие из отверстия входа/выхода временного хранилища, на барабан посредством ролика доставки, чтобы сохранять банкноты при их наматывании вокруг барабана. Когда банкноты сохраняются во временном хранилище, в памяти сохраняются числа импульсов в момент времени начала вращения барабана и в момент времени, когда верхний и задний концы банкнот проходят через датчик, расположенный между отверстием входа/выхода временного хранилища и барабаном, и дополнительно число импульсов в момент времени остановки вращения барабана. На основе этих чисел импульсов обеспечивается управление в отношении положения наматывания банкнот в соответствии с величиной вращения барабана.
Теперь, в вышеописанном стандартном автоматическом устройстве кассовых операций, когда происходит какой-либо отказ, который вызывает остановку автоматического устройства кассовых операций, ручное вращение барабана временного хранилища с банкнотами, намотанными вокруг барабана, вызывает то, что фактические положения банкнот, намотанных вокруг барабана, становятся сдвинутыми по отношению к числам импульсов, сохраненным в памяти для восстановления после отказа, таким образом, вызывая то, что соотношение между ними становится неточным.
Тем временем в операции возврата в исходное положение, которая должна выполняться после восстановления автоматического устройства кассовых операций, проверяется, имеются ли оставшиеся банкноты во временном хранилище. Если есть оставшаяся банкнота, выполняется вышеописанная операция разматывания, чтобы размотать банкноту.
Однако, если операция разматывания выполняется, когда положение банкнот, намотанных вокруг барабана, сдвинуто относительно числа импульсов, сохраненного в памяти, как описано выше, число импульсов, сохраненное в памяти, не может использоваться, чтобы заново запускать точное отслеживание проходящих банкнот посредством датчика.
На практике, когда датчик выполняет отслеживание банкнот в такой ситуации, различие между числами импульсов, сохраненными в памяти, и положениями банкнот, фактически намотанных вокруг барабана, вызывает возможность ошибочного распознавания того, что банкноты не разматываются нормально, т.е. ошибку при разматывании, даже когда банкноты фактически разматываются нормально.
Поэтому, возможно, что в операции возврата в исходное положение отслеживание проходящих банкнот посредством датчика не выполняется. Однако, при соответствующем расположении, например, банкноты, когда застревание между барабаном и роликом доставки не может быть обнаружено, барабан будет продолжать вращаться, чтобы промотать застрявшую банкноту, что, тем самым, вызовет нарушение функционирования устройства.
Таким образом, стандартное временное хранилище не может надежно обнаруживать ненормальность, такую как застревание, при конкретных условиях, таких как операция возврата в исходное положение.
Сущность изобретения
Целью настоящего изобретения является обеспечить устройство хранения средства обращения, которое может более надежно обнаруживать ненормальность по сравнению со стандартным устройством.
Устройство хранения средства обращения согласно настоящему изобретению содержит барабан, наматывающий средство обращения и хранящий его вокруг своей круглой поверхности, ролик доставки, посылающий средство обращения, приходящее из отверстия входа/выхода для наматывания, чтобы посылать средство обращения к барабану, и разматывающий средство обращения, размотанное с барабана, в отверстие входа/выхода для разматывания; и блок отслеживания, отслеживающий путь перемещения для средства обращения между положением начала наматывания барабана и роликом доставки, при этом блок отслеживания отслеживает путь перемещения независимо от величины вращения барабана, полученной при наматывании.
В соответствии с настоящим изобретением, например, когда банкноты разматываются в операции возврата в исходное положение, ошибочное обнаружение, которое в противном случае было бы вызвано использованием числа импульсов, полученного при наматывании, устраняется, и является, таким образом, возможным корректно обнаруживать застревание, происходящее между барабаном и роликом доставки. Таким образом, может осуществляться устройство хранения средства обращения, которое способно надежно обнаруживать ненормальность при наматывании банкнот по сравнению с предшествующим уровнем техники.
Идея изобретения, раскрытая в этой заявке, также может определяться способами, другими, нежели в формуле изобретения, представленной ниже. Идея изобретения может состоять из нескольких отдельных изобретений, особенно если изобретение рассматривается в свете явных или неявных подзадач или с точки зрения достигаемых преимуществ. В таком случае, некоторые из признаков, включенных в формулу изобретения, могут быть излишними с точки зрения отдельных идей изобретения. В рамках структуры базовой идеи изобретения, признаки разных вариантов осуществления применимы в сочетании с альтернативными вариантами осуществления.
Объем заявки настоящего изобретения простирается на произвольную комбинацию, или частичное выделение, части или всех из различных вариантов осуществления, описанных ниже.
Краткое описание чертежей
Цели и признаки настоящего изобретения станут более ясными из рассмотрения последующего подробного описания, взятого в сочетании с сопроводительными чертежами, на которых:
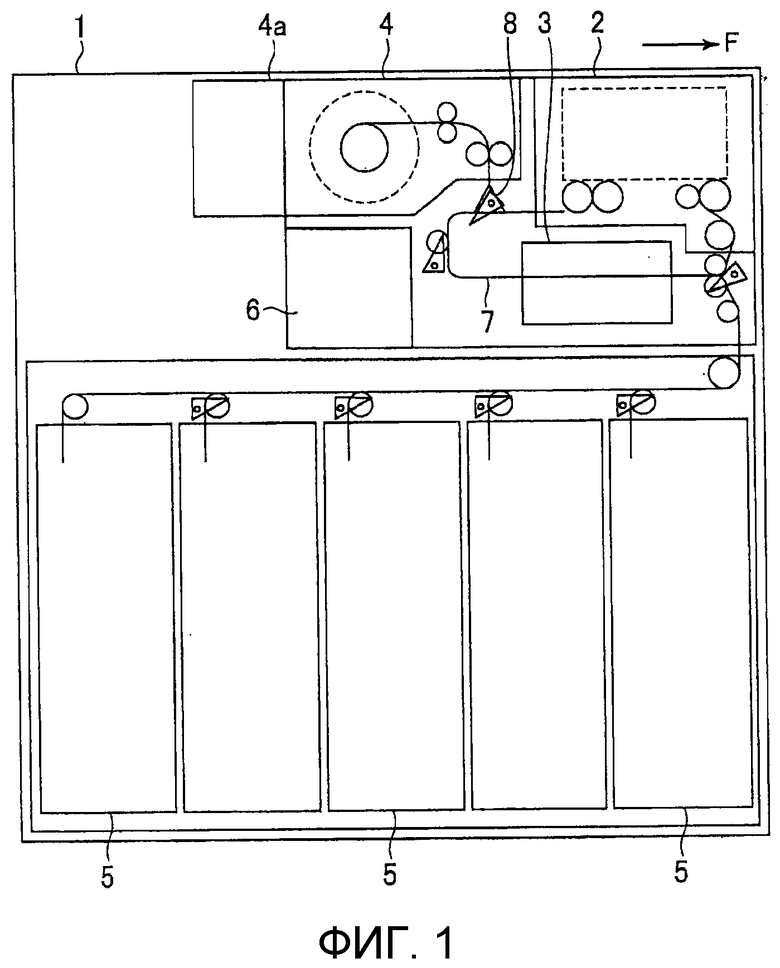
Фиг. 1 является вертикальной проекцией в перспективе, схематически показывающей внутреннюю структуру автоматического устройства кассовых операций в соответствии с одним вариантом осуществления настоящего изобретения;
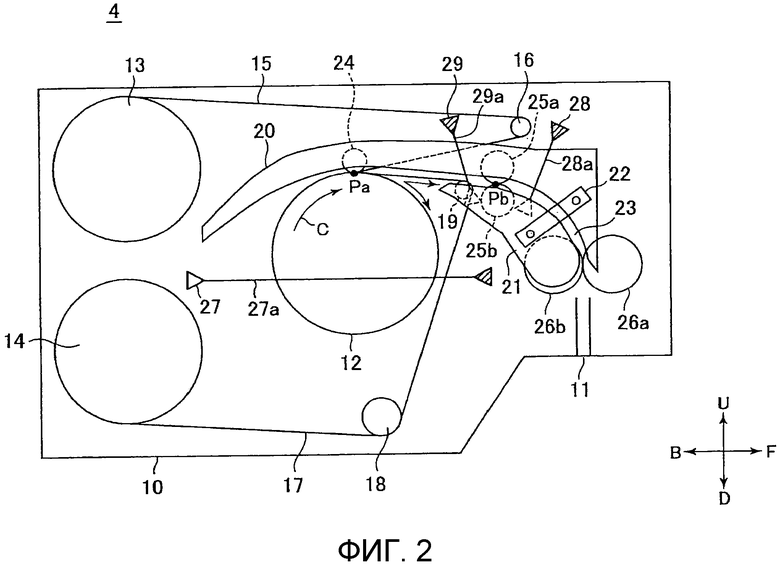
Фиг. 2 является вертикальной проекцией в перспективе, схематически показывающей пример внутренней структуры временного хранилища;
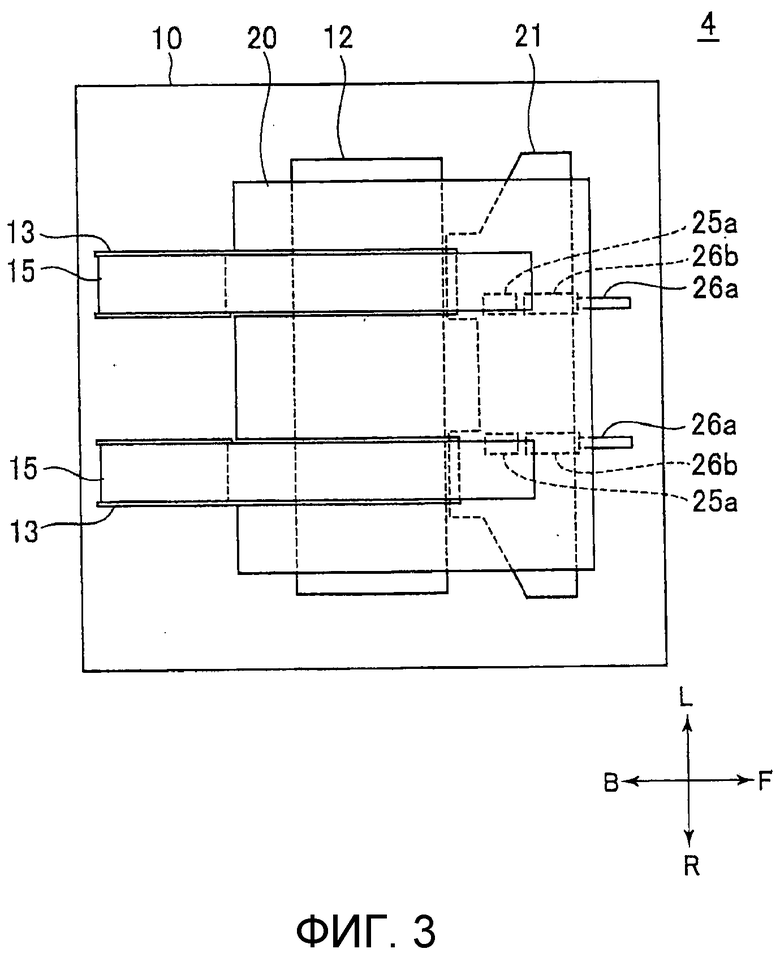
Фиг. 3 является схематическим видом сверху, показывающим внутреннюю структуру временного хранилища, показанного на фиг. 2, при просмотре сверху;
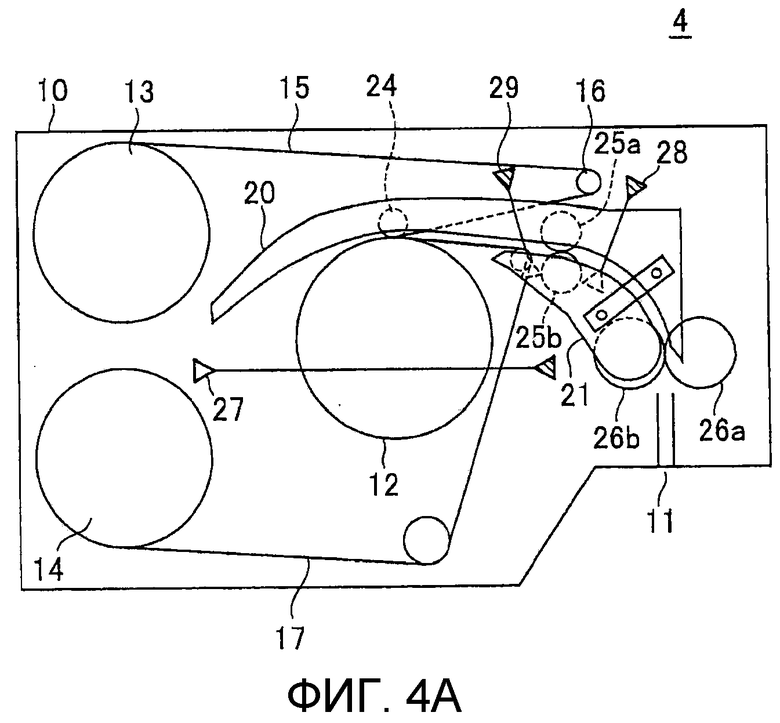
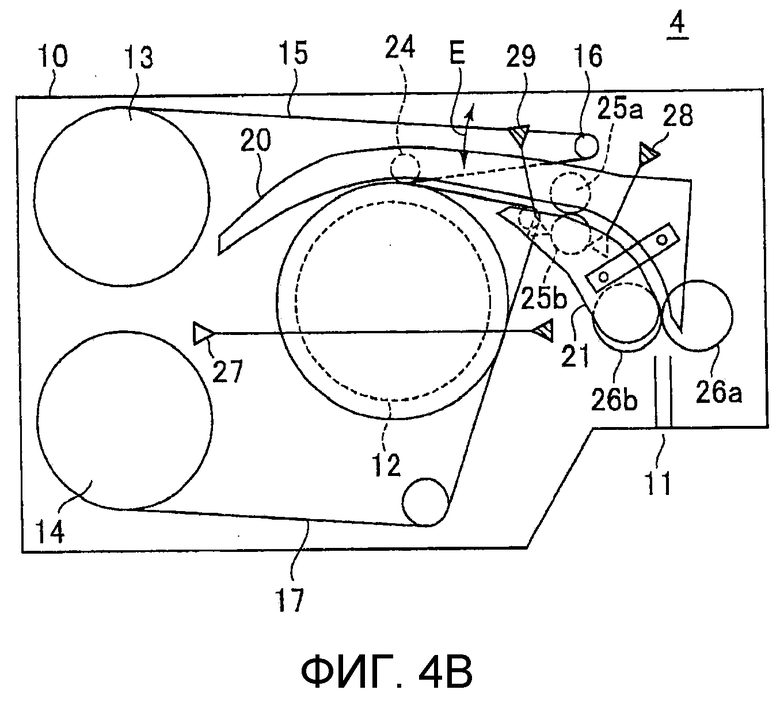
Фиг. 4A и 4B являются вертикальными проекциями в перспективе, как фиг. 2, для использования в описании перемещения подвижной направляющей во временном хранилище, показанном на фиг. 2;
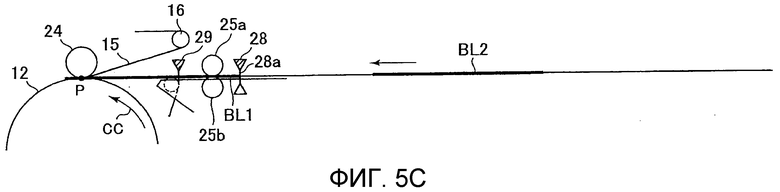
Фиг. 5A-5C являются схематическими диаграммами для использования в описании операции наматывания банкнот посредством временного хранилища;
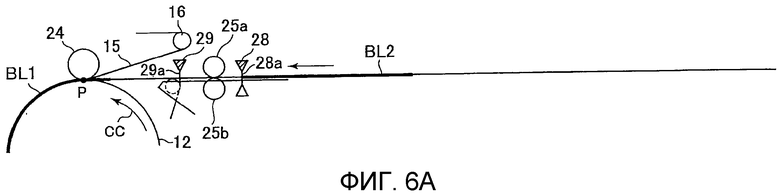
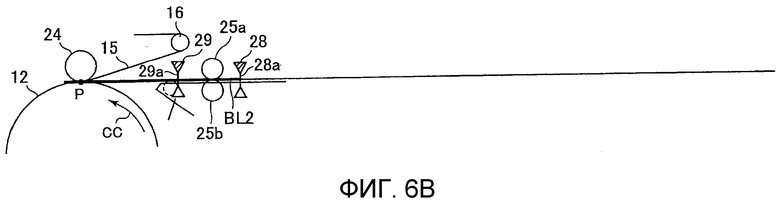
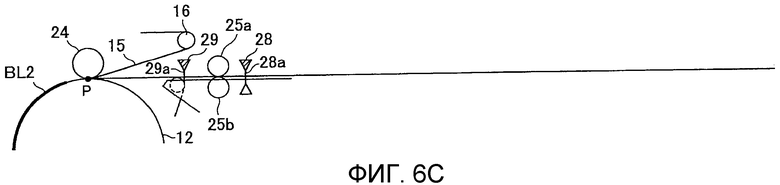
Фиг. 6A-6C являются схематическими диаграммами для использования в описании операции наматывания банкнот посредством временного хранилища;
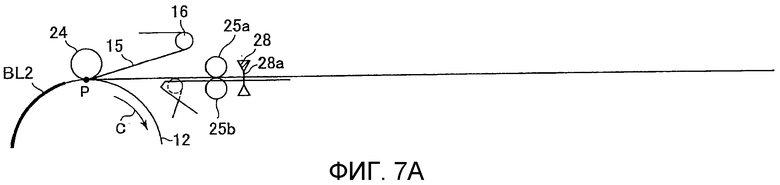
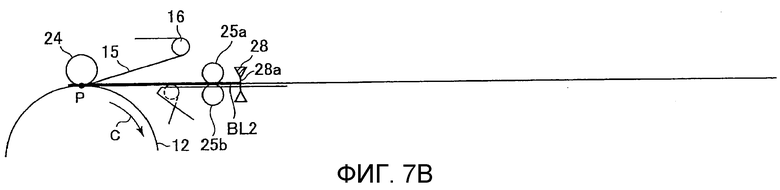
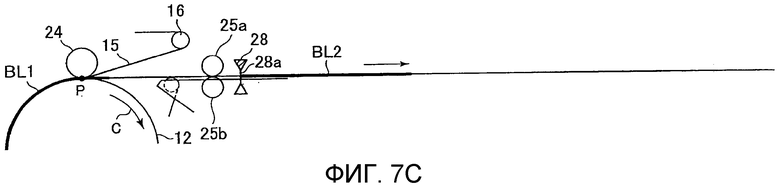
Фиг. 7A-7C являются схематическими диаграммами для использования в описании операции разматывания банкнот посредством временного хранилища без датчика застревания;
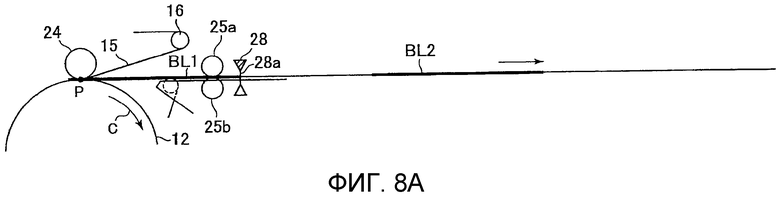
Фиг. 8A-8C являются схематическими диаграммами для использования в описании операции разматывания банкнот посредством временного хранилища без датчика застревания;
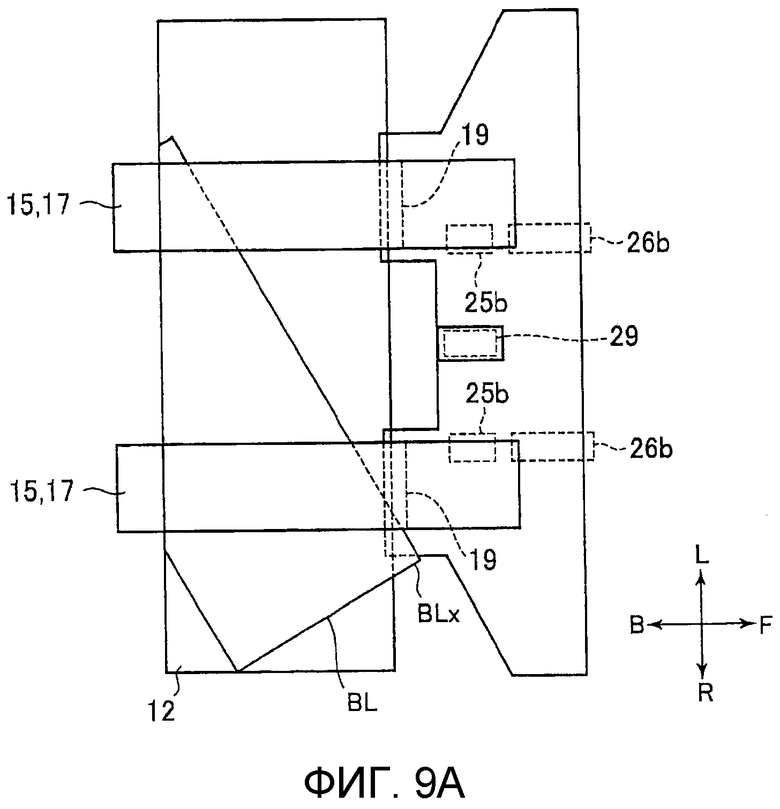
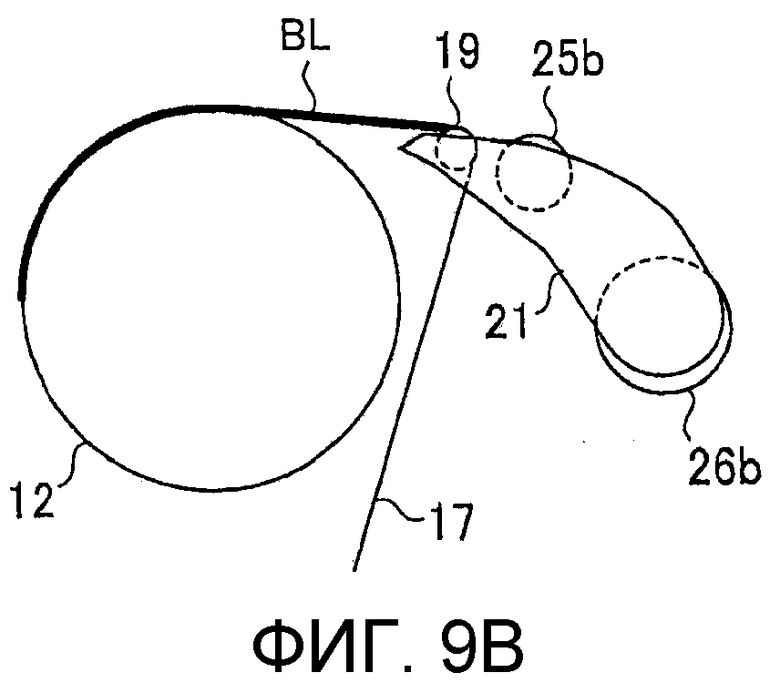
Фиг. 9A и 9B являются соответственно видом сверху и видом сбоку, схематически показывающими внутреннюю структуру временного хранилища, чтобы показывать то, как угол банкноты смещен от барабана;
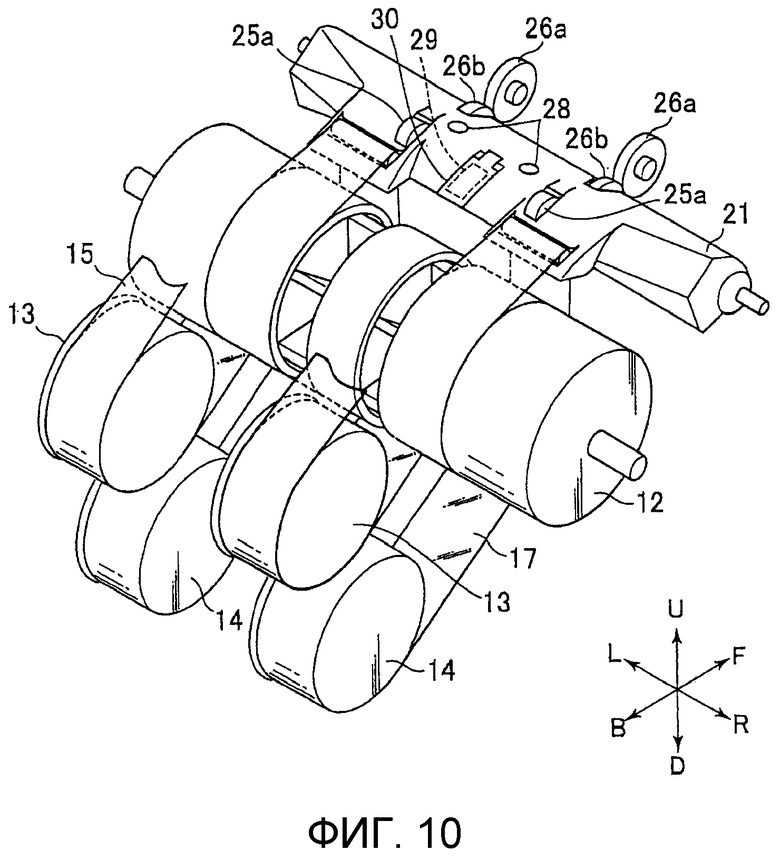
Фиг. 10 является видом в перспективе, схематически показывающим структуру временного хранилища;
Фиг. 11A и 11B являются блок-схемами последовательности операций, показывающими процедуру процесса разматывания посредством контроллера блоков временного хранилища;
Фиг. 12A-12C являются схематическими диаграммами для использования в описании потока отслеживания включенного/выключенного состояния посредством датчика застревания;
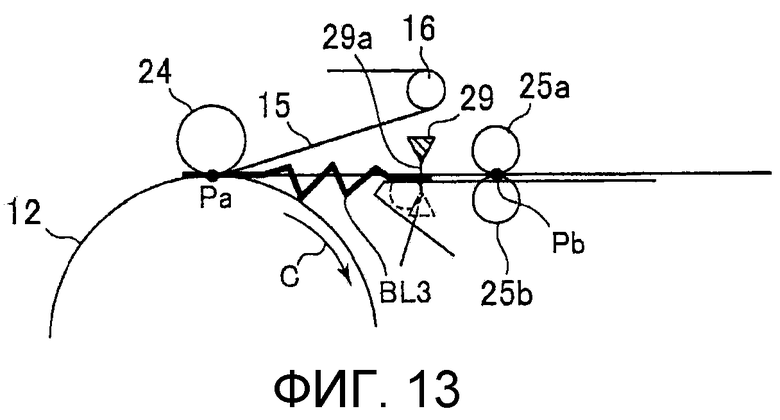
фиг. 13 является схематической диаграммой для использования в описании наступления застревания;
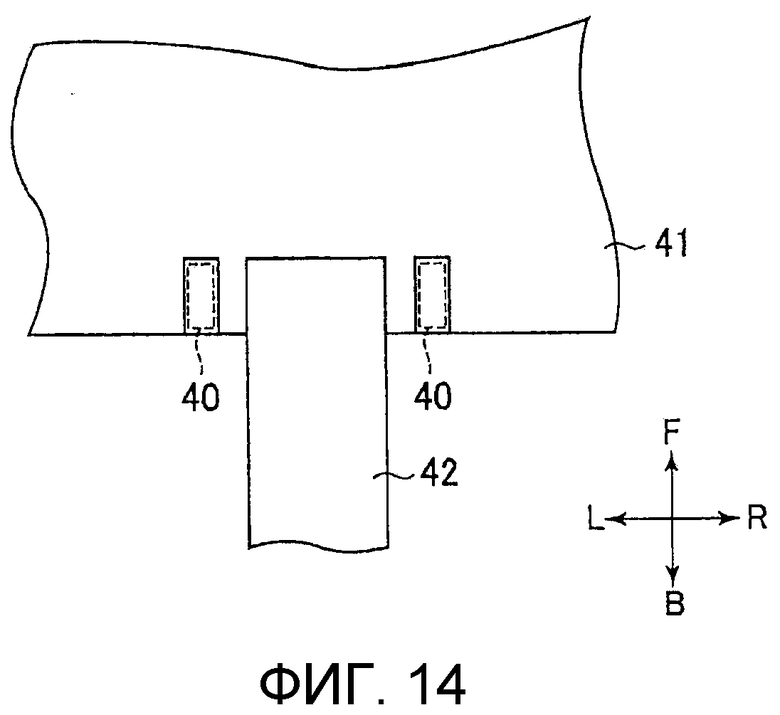
Фиг. 14 является частичным видом сверху, схематически показывающим временное хранилище, чтобы показать положение датчика застревания в соответствии с альтернативным вариантом осуществления.
Наилучший вариант осуществления для реализации изобретения
Со ссылкой на сопроводительные чертежи, будут подробно описаны варианты осуществления согласно настоящему изобретению. Во-первых, как показано на фиг. 1, рециркуляционный тип автоматического устройства 1 кассовых операций в соответствии с вариантом осуществления настоящего изобретения содержит подблоки, такие как секция 2 обслуживания потребителя, устройство 3 проверки банкнот, временное хранилище 4, кассеты 5 для банкнот и кассету 6 для забракованных банкнот, расположенные как проиллюстрировано, и дополнительно включает в себя путь 7 перемещения, соединяющий эти подблоки, чтобы перемещать банкноты, и лопатку 8 для переключения подблоков в качестве места назначения банкнот, при этом эти компоненты выполнены с возможностью, чтобы ими, в общем, управлял главный контроллер, не показан.
Секция 2 обслуживания потребителя является секцией интерфейса, расположенной, чтобы быть обращенной к пользователю, чтобы принимать и доставлять банкноты от и к пользователю. Секция 2 обслуживания потребителя обеспечивается механизмом разделения для разделения банкнот, вставленных пользователем для внесения, одна за одной, чтобы посылать их в путь 7 перемещения, и механизмом сбора для сбора банкнот, посланных из кассет 5 для банкнот для снятия. В последующем описании, по отношению к корпусу 1 устройства, сторона, направленная на пользователя, упоминается как ближняя или фронтальная сторона F, задняя или дальняя сторона как сторона B, верхняя сторона как сторона U и нижняя сторона как сторона D.
Устройство 3 проверки банкнот проверяет банкноты, перемещаемые из секции 2 обслуживания потребителя, для внесения, и также проверяет банкноты, перемещаемые из кассет 5 для банкнот, для снятия, и затем передает сигнал, показывающий полученный результат проверки, в контроллер. Контроллер определяет место назначения банкнот на основе результата проверки, переданного от устройства 3 проверки банкнот.
Временное хранилище 4 является хранилищем банкнот, выполненным с возможностью временно хранить банкноты, признанные после проверки как нормальные банкноты посредством устройства 3 проверки банкнот для внесения, и разделять, когда пользователь подтверждает внесенную сумму в секции 2 обслуживания потребителя, банкноты одна за одной, чтобы посылать их в путь 7 перемещения. Таким образом, нормальные банкноты, посланные из временного хранилища 4 в путь 7 перемещения, проверяются посредством устройства 3 проверки банкнот для определения номинала и сохраняются в кассетах 5 для банкнот, описанных ниже, согласно номиналам.
Временное хранилище 4 также выполнено с возможностью временно хранить банкноты, признанные после проверки устройством 3 проверки банкнот как ненормальные банкноты для снятия, и посылать, когда пользователь подтверждает сумму снятия в секции 2 обслуживания потребителя, банкноты в путь 7 перемещения. Ненормальные банкноты, посланные из временного хранилища 4 в путь 7 перемещения банкнот, таким образом, сохраняются в кассете 6 для забракованных банкнот. Временное хранилище 4 дополнительно содержит контроллер 4a блоков для управления работой временного хранилища 4.
Кассеты 5 для банкнот являются хранилищами банкнот, выполненными с возможностью хранения банкнот, пополняемых для снятия, и банкнот, внесенных в результате транзакции внесения. Кассеты 5 для банкнот обеспечиваются механизмом разделения и механизмом сбора, как секция 2 обслуживания потребителя.
Кассета 6 для забракованных банкнот является хранилищем банкнот, выполненным с возможностью хранить банкноты, признанные после проверки посредством устройства 3 проверки банкнот как ненормальные банкноты, и обеспечена механизмом сбора, тоже.
Лопатка 8 является продолговатым элементом, имеющим клиновидное поперечное сечение, и выполнена с возможностью поворота посредством вращательного приводного механизма, не показан, на предварительно определенный угол в ответ на сигнал управления от контроллера, тем самым, изменяя место назначения банкнот.
Далее, иллюстративная структура временного хранилища 4 автоматического устройства 1 кассовых операций будет описываться со ссылкой на фиг. 2-10. Фиг. 2 показывает структуру компонентов, других, нежели контроллер 4a блоков временного хранилища 4. Как показано на фиг. 2, временное хранилище 4 имеет проем отверстия 11 входа/выхода банкнот внизу на фронтальной (B) стороне (внизу справа на фигуре) корпуса 10 и выполнено так, чтобы банкноты могли вставляться в и извлекаться из отверстия 11 входа/выхода банкнот.
В центре временного хранилища 4 размещается цилиндрический барабан 12, простирающийся в поперечном направлении (L, R, как показано на фиг. 10, например) по отношению к корпусу 1 устройства, т.е. направлении, перпендикулярном листу бумаги на фиг. 2. Вверху на задней (B) стороне (вверху слева на фигуре) барабана 12 располагается верхняя катушка 13, и внизу на задней стороне (внизу слева на фигуре) барабана 12 располагается нижняя катушка 14. Барабан 12, верхняя катушка 13 и нижняя катушка 14 механически соединены с двигателем наматывания посредством приводной системы, также не показана, и выполнены с возможностью вращения.
Верхняя лента 15 протянута вперед к верхнему ролику 16, расположенному диагонально вверху на передней (F) стороне барабана 12 так, чтобы проходить выше барабана 12 от верхней катушки 13 и поворачивать назад к верхней части окружности барабана 12 за счет верхнего ролика 16.
С другой стороны, нижняя лента 17 протянута вперед (F) от нижней катушки 14 к первому нижнему ролику 18, расположенному ниже барабана 12, и поворачивает вверх ко второму нижнему ролику 19, расположенному впереди барабана 12, за счет первого нижнего ролика 18 так, чтобы проходить впереди барабана 12, и далее поворачивает назад к верхней части окружности барабана 12 за счет второго нижнего ролика 19.
Вследствие упомянутого выполнения временное хранилище 4 вращает барабан 12, верхнюю катушку 13 и нижнюю катушку 14, тем самым, наматывая верхнюю ленту 15, протянутую от верхней катушки 13, и нижнюю ленту 17, протянутую от нижней катушки 14, вокруг барабана 12, при этом верхняя часть окружности барабана 12 установлена как положение Pa начала наматывания при наслаивании верхней ленты 15 на нижнюю ленту 17.
Временное хранилище 4 дополнительно содержит верхнюю подвижную направляющую 20, расположенную так, чтобы покрывать отверстие 11 входа/выхода банкнот до задней стороны (B) круглой поверхности барабана 12 сверху, и ниже фронтальной стороны (F) верхней подвижной направляющей 20, нижнюю подвижную направляющую 21, расположенную так, что она простирается от окрестности отверстия 11 входа/выхода банкнот ко второму нижнему ролику 19 рядом с барабаном 12 вдоль нижней поверхности верхней подвижной направляющей 20.
Верхняя подвижная направляющая 20 и нижняя подвижная направляющая 21 соединены друг с другом посредством скобы 22 для подвижных направляющих с предварительно определенным расстоянием, сформированным между ними. Расстояние формирует путь 23 перемещения между отверстием 11 входа/выхода банкнот и барабаном 12.
В верхней подвижной направляющей 20, ролик 24 наматывания также располагается на положении точно выше барабана 12. Ролик 24 наматывания выполнен с возможностью приходить в контакт сверху с верхней частью окружности барабана 12, т.е. положением Pa начала наматывания.
Во временном хранилище 4, более близко к отверстию 11 входа/выхода банкнот, чем нижний второй ролик 20 на фронтальной стороне (F) барабана 12, поперек пути 23 перемещения размещена пара роликов 25a и 25b доставки, которые обращены друг к другу. В дополнение, более близко к отверстию 11 входа/выхода банкнот, чем ролики 25a и 25b доставки, поперек пути 23 перемещения размещена пара роликов 26a и 26b перемещения, которые обращены друг к другу. Среди этих роликов, ролик 25a доставки удерживается посредством верхней подвижной направляющей 20, и ролик 25b доставки, и ролик 26b перемещения удерживаются посредством нижней подвижной направляющей 21. Ролики 25a и 25b доставки и ролики 26a и 26b перемещения соединены с возможностью вращения с двигателем доставки посредством другой приводной системы, также не показана, отдельной от вышеописанной приводной системы.
Таким образом, временное хранилище 4 вращает ролики 25a и 25b доставки и ролики 26a и 26b перемещения, и проводит банкноты между роликами 25a и 25b доставки и между роликами 26a и 26b перемещения, тем самым, перемещая банкноты в направлении от отверстия 11 входа/выхода банкнот в пути 23 перемещения к барабану 12 или в направлении, противоположном этому.
Например, когда банкнота сохраняется во временном хранилище 4, барабан 12 вращается против часовой стрелки на фиг. 2 при вращении роликов 25a и 25b доставки и роликов 26a и 26b перемещения, чтобы тем самым перемещать банкноту от отверстия 11 входа/выхода банкнот к барабану 12, чтобы посылать ее по пути между верхней лентой 15 и нижней лентой 17. Затем, банкнота поддерживается между верхней лентой 15 и нижней лентой 17 и наматывается, опираясь на барабан 12. Таким образом, банкнота сохраняется на окружности барабана 12.
В противоположность, когда банкнота забирается из временного хранилища 4, барабан 12 вращается по часовой стрелке C на фигуре, чтобы наматывать верхнюю ленту 15 и нижнюю ленту 17 соответственно вокруг верхней катушки 13 и нижней катушки 14, чтобы посылать банкноту в путь 23 перемещения. В этот момент, во временном хранилище 4, ролики 25a и 25b доставки и ролики 26a и 26b перемещения вращаются в направлении, противоположном направлению для сохранения, тем самым, перемещая банкноту в отверстие 11 входа/выхода банкнот.
Таким образом, временное хранилище 4 может наматывать и сохранять банкноты, и разматывать, и снимать, т.е. выгружать, сохраненные банкноты.
Отметим, что, хотя фиг. 2 иллюстрирует верхнюю катушку 13, нижнюю катушку 14, верхнюю ленту 15, верхний ролик 16, нижнюю ленту 17, первый нижний ролик 18 и второй нижний ролик 19, которые видны с ближней стороны на листе бумаги фигуры, на практике на дальней стороне на листе бумаги также расположены соответствующие компоненты, парные для упомянутых компонентов. Эта ситуация также видна на фиг. 10. Другими словами, временное хранилище 4 содержит пару верхних катушек 13, пару нижних катушек 14, пару верхних лент 15, пару верхних роликов 16, пару нижних лент 17, пару первых нижних роликов 18 и пару вторых нижних роликов 19, расположенных соответственно на ближней и дальней сторонах на фигуре, т.е. на левой и правой сторонах (L, R), если смотреть с фронтальной стороны (F). Поэтому, временное хранилище 4 может удерживать банкноту на левой стороне (L) между левой верхней лентой 15 и левой нижней лентой 17 и на правой стороне (R) между правой верхней лентой 15 и правой нижней лентой 17, чтобы наматывать ее вокруг барабана 12. Аналогично, как видно на фиг. 3, имеется также пара роликов 25a и 25b доставки и пара роликов 26a и 26b перемещения, расположенные соответственно на правой и левой сторонах, с возможностью вращения, чтобы тем самым принимать банкноты между ними, чтобы перемещать банкноты.
Таким образом, полный диаметр барабана 12, включающего в себя банкноты и слои ленты, намотанные вокруг, изменяется не только в соответствии со слоями ленты, намотанной вокруг барабана 12, но также количеством банкнот, намотанных вокруг барабана 12. Поэтому, временное хранилище 4 выполнено таким образом, что верхняя подвижная направляющая 20 и нижняя подвижная направляющая 21 следуют за изменением и поворачиваются вокруг точки поворота, по существу, соосно с осью вращения ролика 26b перемещения, как показано посредством стрелки E на фиг. 4B. Соответственно, ролик 24 наматывания может всегда приходить в контакт с верхней частью намотанной ленты на окружности барабана 12, т.е. в положении Pa начала наматывания.
Более того, для обслуживания по содержанию и ремонту, временное хранилище 4 выполнено таким образом, чтобы обеспечивать возможность ручного вращения барабана 12, верхней катушки 13, нижней катушки 14, роликов 25a и 25b доставки и роликов 26a и 26b перемещения с помощью рукоятки, не показана.
В дополнение, временное хранилище 4 обеспечивается, как показано на фиг. 2, датчиком 27 наличия, обнаруживающим, имеется ли или нет банкнота, намотанная вокруг барабана 12. Датчик 27 наличия может быть, например, фотоэлектрическим датчиком, имеющим комбинацию светоизлучающего устройства и светочувствительного устройства. Светоизлучающее устройство может быть, например, светоизлучающим диодом (LED), выполненным с возможностью излучать световой луч 27a, и светочувствительное устройство может быть, например, фотодиодом, расположенным так, что оптическая ось 27a является, по существу, перпендикулярной к оси вращения барабана 12, чтобы принимать световой луч 27a.
Дополнительно, временное хранилище 4 обеспечивается датчиком 28 доставки, обнаруживающим, имеется ли или нет банкнота, проходящая между роликами 25a, 25b доставки и роликами 26a, 26b перемещения. Датчик 28 доставки также может быть, например, фотоэлектрическим датчиком, имеющим комбинацию светоизлучающего устройства и светочувствительного устройства, и располагается так, что оптическая ось 28a пересекает путь перемещения между роликами 25a, 25b доставки и роликами 26a, 26b перемещения. В варианте осуществления датчик 28 доставки выполнен таким образом, чтобы быть в проводящем "включенном" состоянии, когда оптическая ось 28a пересекается банкнотой, проходящей по пути 23 перемещения, и чтобы быть в непроводящем "выключенном" состоянии, когда оптическая ось 28a не пересекается.
Временное хранилище 4 выполнено с возможностью сохранять подсчет импульсов, т.е. число импульсов, полученное от двигателя наматывания, который в варианте осуществления является шаговым двигателем, в памяти, не показана, контроллера 4a блоков, фиг. 1. Контроллер 4a блоков может косвенно определять, на основе числа импульсов, в каком положении на барабане 12 банкноты намотаны вокруг. Конкретный способ обнаружения положений будет описываться подробно со ссылкой на фиг. 5A по 6C.
Например, когда две банкноты непрерывно намотаны вокруг барабана 12, контроллер 4a распознает, например, посредством сигнала уведомления извне хранилища 4, что первая банкнота BL1, направленная во временное хранилище 4, перемещена в предварительно определенное положение рядом с временным хранилищем 4, чтобы начинать вращение двигателя наматывания, барабан 12, тем самым, начинает вращаться в направлении, показанном посредством стрелки CC. Одновременно, число импульсов Cs, например, "0", в это время сохраняется в памяти.
Таким образом, контроллер 4a осуществляет отслеживание, когда датчик 28 доставки находится в проводящем состоянии. Это называется отслеживанием включенного состояния. Как показано на фиг. 5B, когда датчик 28 доставки переходит в проводящее состояние в ответ на верхний конец банкноты BL1, прибывающий на оптическую ось 28a датчика 28 доставки, число импульсов C1s, преобладающее в это время, сохраняется в памяти.
Далее, контроллер 4a отслеживает, когда датчик 28 доставки переходит в непроводящее состояние. Это называется отслеживанием выключенного состояния.
Как показано на фиг. 5C, когда датчик 28 доставки переходит в непроводящее состояние в ответ на задний конец банкноты BL1, отходящий от оптической оси 28a датчика 28 доставки, число импульсов C1e, преобладающее в это время, сохраняется в памяти.
Контроллер 4a выполняет снова отслеживание включенного состояния датчика 28 доставки. Как показано на фиг. 6A, когда датчик 28 доставки переходит в проводящее состояние в ответ на верхний конец банкноты BL2, прибывающий на оптическую ось 28a датчика 28 доставки, число импульсов C2s, преобладающее в это время, сохраняется в памяти.
Далее, контроллер 4a выполняет отслеживание выключенного состояния датчика 28 доставки. Как показано на фиг. 6B, когда датчик 28 доставки переходит в непроводящее состояние в ответ на задний конец банкноты BL2, отходящий от оптической оси 28a датчика 28 доставки, число импульсов C2e, преобладающее в это время, сохраняется в памяти.
После этого, контроллер 4a останавливает, как показано на фиг. 6C, вращение двигателя наматывания во время, когда банкнота BL2 намотана вокруг барабана 12, тем самым останавливая вращение барабана 12. В этот момент число импульсов Ce, в текущее время преобладающее, сохраняется в памяти.
Таким образом, контроллер 4a хранит соответствующие числа импульсов Cs и Ce в моменты времени начала и остановки вращения двигателя наматывания, соответствующие числа C1s и C2s импульсов в моменты времени прибытия верхних концов банкнот BL1 и BL2 на оптическую ось 28a датчика 28 доставки, и соответствующие числа C1e и C2e импульсов в моменты времени, в которые задние концы банкнот BL1 и BL2 покидают оптическую ось 28a датчика 28 доставки.
Контроллер 4a выполнен с возможностью сохранять числа импульсов в моменты времени, описанные выше. Поэтому, на основе этих чисел импульсов, контроллер 4a управляет величиной вращения барабана 12, назначенной положению банкнот, намотанных вокруг барабана 12. Таким образом, контроллер 4a может косвенно определять, посредством числа импульсов, то, в каком положении на барабане 12 банкноты намотаны вокруг.
Таким образом, временное хранилище 4 выполняет отслеживание включенного/выключенного состояния датчика 28 доставки для наматывания, и в моменты времени, когда датчик 28 переходит в проводящее/непроводящее состояние, назначает величину вращения барабана 12 положению наматывания банкноты на основе числа импульсов, сохраненного в памяти, чтобы управлять ими. Соответственно, возможно косвенно определять, в каком положении на барабане 12 банкноты намотаны вокруг.
Контроллер 4a блоков может осуществляться посредством, например, системы обработки, такой как микрокомпьютер. Функция контроллера 4a может, по меньшей мере, частично или полностью осуществляться посредством компьютера, на котором установлены и исполняются запрограммированные последовательности. Это также относится к вышеописанному главному контроллеру.
Теперь, во временном хранилище 4 варианта осуществления, возможно, при разматывании банкнот, обнаруживать, без использования числа импульсов, застревание, происходящее между положением PA начала наматывания барабана 12 и точкой PB зажима роликов 25a и 25b доставки, посредством датчика 29 застревания. Для этой цели датчик 29 застревания располагается в варианте осуществления так, чтобы обнаруживать застревание, происходящее между положением Pa начала наматывания барабана 12 и точкой сближения роликов 25a и 25b доставки, т.е. точкой Pb зажима. Датчик 29 застревания также может быть фотоэлектрическим датчиком, выполненным в виде комбинации светоизлучающего устройства и светочувствительного устройства. Датчик 29 застревания также выполнен с возможностью быть в проводящем "включенном" состоянии, когда оптическая ось 29a пересекается банкнотой, и в непроводящем "выключенном" состоянии, когда оптическая ось 29a не пересекается.
Более подробно, датчик 29 застревания располагается так, что оптический путь 29a проходит между верхней поверхностью заднего конца нижней подвижной направляющей 21 и нижней поверхностью верхней подвижной направляющей 20 выше упомянутой первой. Конкретно, например, одно из светоизлучающего устройства и светочувствительного устройства размещается в заднем конце нижней подвижной направляющей 21 и другое размещается на стороне верхней подвижной направляющей 20 выше упомянутого одного устройства.
Датчик 29 застревания, таким образом, расположен в положении, описанном выше, во-первых, так как задний конец нижней подвижной направляющей 21 формирует секцию-разветвитель банкнот, намотанных вокруг барабана 12, и банкнот, подлежащих отправке в путь 23 перемещения, так что застревание скорей всего происходит там при разматывании банкнот.
Во-вторых, если бы оптическая ось 29a датчика 29 застревания располагалась слишком близко к положению Pa начала наматывания барабана 12, то увеличивалась бы вероятность ошибочного обнаружения намотанной банкноты как застревания.
В-третьих, в противоположность, если бы оптическая ось 29a датчика 29 застревания располагалась слишком близко к точке Pb зажима роликов 25a и 25b доставки, то верхний конец банкноты, застрявшей между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки не достигал бы оптической оси 29a, и увеличивалась бы вероятность потерпеть неудачу в обнаружении застревания.
По этим причинам, в варианте осуществления, одно устройство датчика 29 застревания располагается в заднем конце нижней подвижной направляющей 21 и другое устройство располагается на стороне верхней подвижной направляющей 20 выше упомянутого одного устройства.
В связи с этим, проблема, которая возникает, если операция разматывания выполняется посредством использования числа импульсов и отслеживания включенного состояния датчика 28 доставки без использования датчика 29 застревания, будет описываться с использованием фиг. 7A по 8A подробно.
Когда две намотанных банкноты BL1 и BL2 разматываются с барабана 12 в направлении стрелки C, контроллер 4a использует количество импульсов, которое равняется разности между числом импульсов Ce, которое было при остановке вращения двигателя наматывания, и числом импульсов C2e, когда задний конец второй банкноты BL2 покидает оптическую ось 28a датчика 28 доставки, также как скорость вращения двигателя наматывания, чтобы вычислять время от начала вращения двигателя наматывания, как показано на фиг. 7A, до прибытия верхнего конца (заднего конца для наматывания) банкноты BL2 на датчик 28 доставки, т.е. ожидаемое время прибытия. То есть, контроллер 4a вычисляет, в качестве ожидаемого времени прибытия, время от начала разматывания банкноты BL2, намотанной вокруг барабана 12, до прибытия верхнего конца на датчике 28 доставки.
Затем, контроллер 4a начинает вращение двигателя наматывания и начинает измерение времени. Затем, контроллер 4a выполняет отслеживание включенного состояния датчика 28 доставки в течение предварительно определенного времени, охватывающего ожидаемое время прибытия. Отметим, что, если банкнота BL2 разматывается нормально, как показано на фиг. 7B, датчик 28 доставки перейдет в проводящее состояние в пределах предварительно определенного времени, охватывающего ожидаемое время прибытия.
Поэтому, контроллер 4a может определять, что банкнота BL2 разматывается нормально, если датчик 28 доставки переходит в проводящее состояние в течение предварительно определенного времени, включающего в себя ожидаемое время прибытия. В противоположность, если датчик 28 доставки не переходит в проводящее состояние в пределах предварительно определенного времени, включающего в себя ожидаемое время прибытия, контроллер 4a определяет, что банкнота BL2 не разматывается нормально, и в свою очередь останавливает вращение ролика наматывания, чтобы вывести сигнал ошибки.
Контроллер 4a использует количество импульсов, которое равняется разности между числом импульсов C2s, когда вершина банкноты BL2 прибывает на оптическую ось 29a, и числом импульсов C1e, когда задний конец банкноты BL1 покидает оптическую ось, также как скорость вращения двигателя наматывания, чтобы вычислять ожидаемое время прибытия от отхода заднего верхнего конца разматываемой банкноты BL2 от оптической оси 28a датчика 28 доставки, как показано на фиг. 7C, до прибытия верхнего конца следующей банкноты BL1 на датчик 28 доставки, как показано на фиг. 8A.
Далее, контроллер 4a выполняет отслеживание включенного состояния датчика 28 доставки в течение предварительно определенного времени, охватывающего это ожидаемое время прибытия после отхода заднего конца банкноты BL2 от оптической оси 28a датчика 28 доставки. Здесь, если банкнота BL1 разматывается нормально, как показано на фиг. 8A, датчик 28 доставки будет находиться в проводящем состоянии в течение предварительно определенного времени, охватывающего ожидаемое время прибытия. Поэтому, контроллер 4a может определять, что банкнота BL1 разматывается нормально, если датчик 28 доставки находится в проводящем состоянии в течение предварительно определенного времени, охватывающего ожидаемое время прибытия. После этого, контроллер 4a останавливает вращение двигателя наматывания, когда нормальное разматывание банкноты BL1 заканчивается, как показано на фиг. 8B и 8C.
В противоположность, если датчик 28 доставки не переходит в проводящее состояние в пределах предварительно определенного времени, включающего в себя ожидаемое время прибытия, контроллер 4a определяет, что банкнота BL1 не разматывается нормально, и, в свою очередь, останавливает вращение ролика наматывания, чтобы выводить сигнал ошибки. Таким образом, контроллер 4a временного хранилища 4 может управлять операцией разматывания банкноты.
В связи с этим, когда на автоматическом устройстве 1 проведения сделок происходит некоторая неисправность, так что устройство 1 останавливается, в качестве работы по восстановлению, барабан 12 часто вращают вручную посредством вращения рукоятки с банкнотами, намотанными вокруг барабана 12 временного хранилища 4. Если такая операция была сделана, возникнет различие между числом импульсов, сохраненным в памяти для наматывания, и положением банкнот, намотанных вокруг барабана 12, что вызывает нарушение соотношения между ними. В таких обстоятельствах, если делается попытка операции возврата в исходное положение для автоматического устройства 1 проведения сделок, чтобы размотать банкноты, различие между числом импульсов и положениями банкнот никогда не будет обеспечивать возможность использовать число импульсов для надежного выполнения отслеживания включенного состояния датчика 28 доставки, таким образом, приводя к неудаче в надежном обнаружении того, нормально ли или нет банкноты разматываются.
Чтобы предотвращать такую ситуацию, временное хранилище 4 варианта осуществления выполнено таким образом, что отслеживание включенного состояния датчика 28 доставки не выполняется в течение операции возврата в исходное положение. Однако, если только отслеживание включенного состояния было временно отключено, наступление застревания между барабаном 12 и роликами 25a и 25b доставки не может обнаруживаться.
Поэтому, временное хранилище 4 варианта осуществления выполнено таким образом, что в вышеописанном положении используется датчик 29 застревания, и дополнительно, что датчик 29 застревания работает, в течение операции возврата в исходное положение, отдельно от числа импульсов. Это делает возможным надежное обнаружение застревания, происходящего между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки.
Отметим, что если намотанная банкнота BL перекашивается, как показано на фиг. 9A, угол BLx банкноты BL смещается от круглой поверхности барабана 12 вовне (на ближней стороне) верхней ленты 15 и нижней ленты 17 на ближней стороне, или вовне (на дальней стороне) верхней ленты 15 и нижней ленты 17 на дальней стороне, так что угол BLx может проходить через конец верхней поверхности заднего конца нижней подвижной направляющей 21. Эта ситуация не является ненормальной.
Поэтому, чтобы ошибочно не обнаруживать эту ситуацию как застревание, датчик 29 застревания размещается в середине между верхней лентой 15 и нижней лентой 17 на ближней стороне и верхней лентой 15 и нижней лентой 17 на дальней стороне.
Следует отметить, что датчик 29 застревания, расположенный в заднем конце нижней подвижной направляющей 21, защищен, например, посредством полупрозрачной крышки 30, которая обеспечивается на заднем конце нижней подвижной направляющей 21, как показано на фиг. 10, и пропускает оптическую ось 29a.
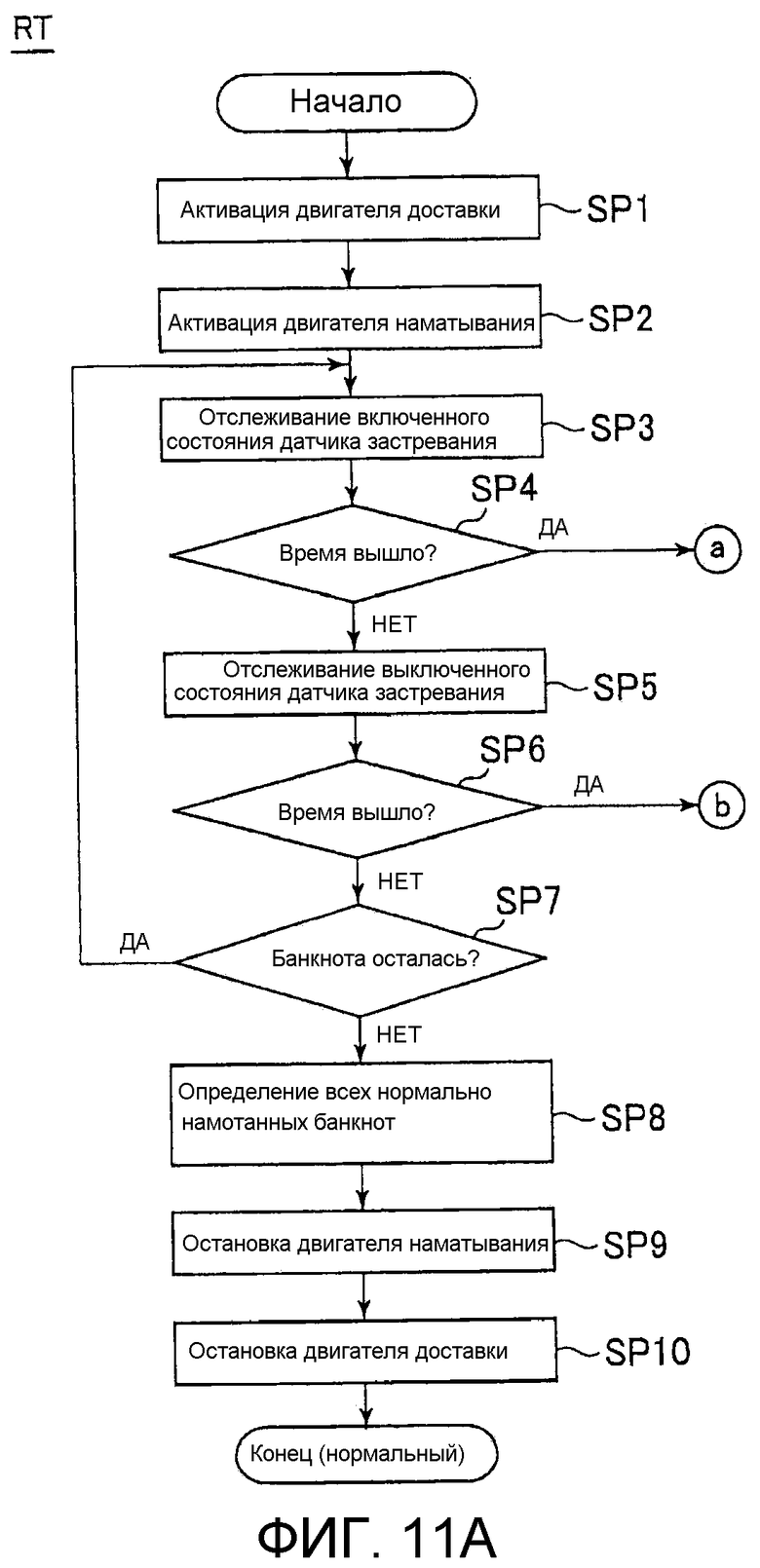
Далее, со ссылкой на блок-схемы последовательности операций, показанные на фиг. 11A и 11B, процедура процесса разматывания RT в операции возврата в исходное положение будет описываться согласно временному хранилищу 4. Процедура процесса разматывания RT исполняется посредством контроллера 4a блоков временного хранилища 4.
В операции возврата в исходное положение, если датчик 27 наличия обнаруживает, что во временном хранилище 4 имеются намотанные банкноты, контроллер 4a блоков временного хранилища 4 начинает процедуру процесса разматывания RT, чтобы перейти на этап SP1.
На этапе SP1, контроллер 4a блоков активирует двигатель доставки так, чтобы он вращался в направлении для разматывания банкнот, и переходит на следующий этап SP2. В этот момент, ролики 25a и 25b доставки и ролики 26a и 26b перемещения соответственно начинают вращаться в направлении для разматывания банкнот.
На этапе SP2, контроллер 4a блоков активирует двигатель наматывания так, чтобы он вращался в направлении для разматывания банкнот, и переходит на следующий этап SP3. В этот момент, в дополнение к роликам 25a и 25b доставки и роликам 26a и 26b перемещения, барабан 12, верхняя катушка 13 и нижняя катушка 14 также начинают вращаться в направлении для разматывания банкнот.
На этапе SP3, контроллер 4a блоков начинает отслеживание включенного состояния датчика 29 застревания, и одновременно начинает измерение времени, и затем переходит на следующий этап SP4.
На этапе SP4, контроллер 4a блоков определяет, истекло ли или нет предварительно определенное ограниченное время после начала отслеживания включенного состояния датчика 29 застревания, т.е. сигнализировать ли о превышении лимита времени. Ограниченное время, таким образом, установленное, предназначено, чтобы ограничивать длительность отслеживания включенного состояния, чтобы предохранять барабан 12 от непрерывного вращения, и, таким образом, может устанавливаться, например, равным периоду времени, необходимому для нескольких дюжин вращений барабанов 12.
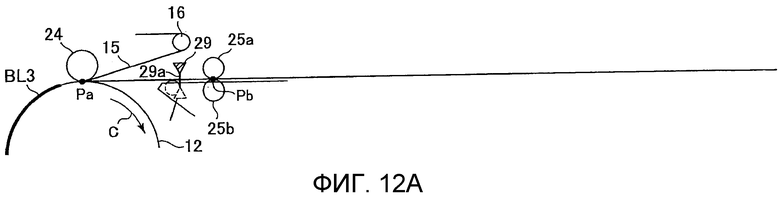
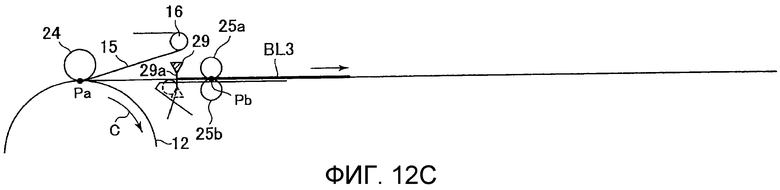
Здесь, например, если верхний конец банкноты BL3 прибывает на оптическую ось 29a датчика 29 застревания, как показано на фиг. 12B, в пределах предварительно определенного времени после начала вращения двигателя наматывания, как показано на фиг. 12A, чтобы переводить датчик 29 застревания в проводящее состояние, контроллер 4a блоков получает положительный результат (Да) на этапе SP4 и переходит на этап SP5.
На этапе SP5, контроллер 4a блоков начинает отслеживание выключенного состояния датчика 29 застревания, и одновременно начинает измерение времени снова, затем переходит на следующий этап SP6.
На этапе SP6, контроллер 4a блоков определяет, истекло ли или нет предварительно определенное ограниченное время после начала отслеживания выключенного состояния датчика 29 застревания, т.е. сигнализировать ли о превышении лимита времени. Ограниченное время, таким образом, установленное, является опорной длительностью для использования в обнаружении того, проходит ли или нет банкнота нормально датчик 29 застревания. Ограниченное время может устанавливаться несколько более длительным, чем время прохождения банкноты, что зависит от скорости перемещения банкнот согласно скорости вращения барабана 12 и от длины банкнот в направлении перемещения, например, длины более короткой стороны, где банкноты перемещаются параллельно более короткой стороне.
Здесь, например, если задний конец банкноты BL3 отходит от оптической оси 29a датчика 29 застревания, как показано на фиг. 12C, в пределах предварительно определенного времени после прибытия верхнего конца банкноты BL3 на датчике 29 застревания, как показано на фиг. 12B, чтобы переводить датчик 29 застревания в непроводящее состояние, то контроллер 4a блоков получает положительный результат (Да) на этапе SP6 и переходит на этап SP7.
На этапе SP7, контроллер 4a блоков определяет посредством датчика 27 наличия, имеются ли все еще или нет банкноты во временном хранилище 4. Если на этапе SP7 получается положительный результат (Да), контроллер 4a блоков возвращается на этап SP3 снова, и затем начинает отслеживание включенного состояния датчика 29 застревания, и одновременно начинает измерение времени снова.
В противоположность, если на этапе SP7 получается отрицательный результат (Нет), это означает, что все имевшиеся банкноты были размотаны нормально. Поэтому, контроллер 4a блоков переходит на этап SP8, чтобы определять, что все имевшиеся банкноты были размотаны нормально, и переходит на следующий этап SP9.
На этапе SP9, контроллер 4a блоков останавливает двигатель наматывания и переходит на следующий этап SP10. В этот момент, вращение барабана 12, верхней катушки 13 и нижней катушки 14 также останавливаются.
На этапе SP10, контроллер 4a блоков останавливает двигатель доставки, и соответственно останавливает, в дополнение к барабану 12, верхнюю катушку 13 и нижнюю катушку 14, ролики 25a и 25b доставки и ролики 26a и 26b перемещения, таким образом, нормально завершая процедуру процесса разматывания RT.
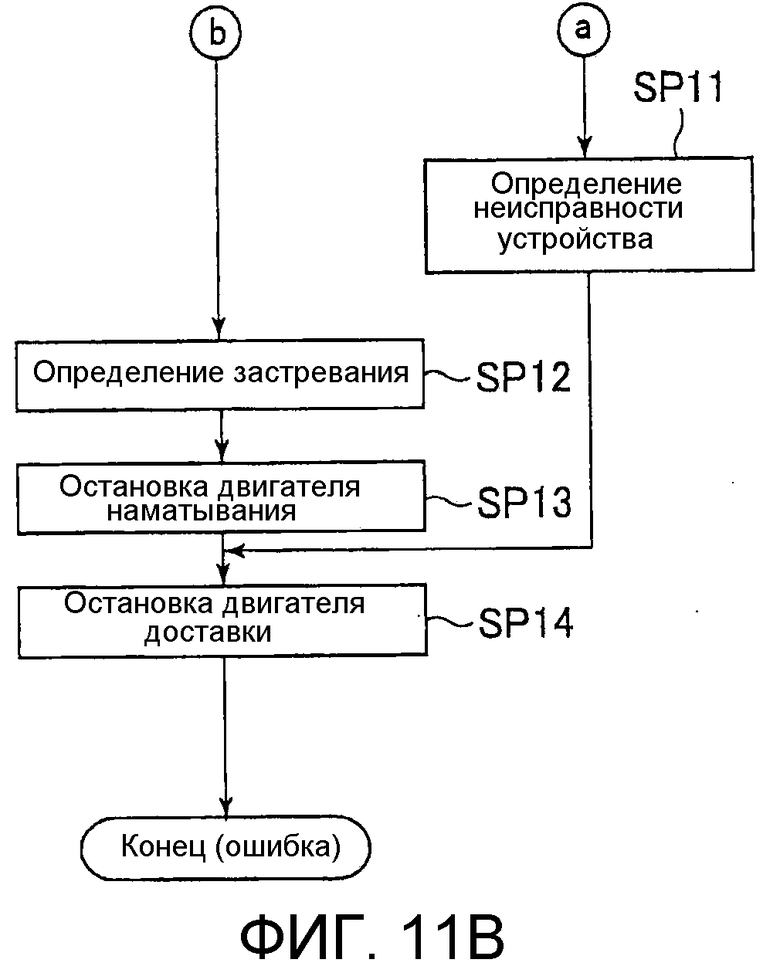
На вышеописанном этапе SP4, однако, если ограниченное время истекло после начала отслеживания включенного состояния датчика 29 застревания, т.е. произошло превышение лимита времени, для получения положительного результата (Да), это означает, что банкнота BL3 не была размотана, несмотря на истечение ограниченного времени. В этот момент, контроллер 4a блоков переходит на этап SP11, показанный на фиг. 11B посредством соединителя "a", чтобы определять, что имеется вероятность неисправности устройства, и, в свою очередь, переходит на следующий этап SP13.
На этапе SP13, контроллер 4a блоков останавливает двигатель наматывания и переходит на следующий этап SP14, и затем останавливает двигатель доставки на этапе SP14. Это вызывает остановку, в дополнение к барабану 12, верхней катушки 13 и нижней катушки 14, роликов 25a и 25b доставки и роликов 26a и 26b перемещения, тем самым, завершая процедуру процесса разматывания RT с ошибкой.
На вышеописанном этапе SP6, фиг. 11A, если ограниченное время истекает после начала отслеживания выключенного состояния датчика 29 застревания, т.е. происходит превышение лимита времени, для получения положительного результата (Да), это означает, что банкнота BL3 не проходит датчик 29 застревания, несмотря на истечение ограниченного времени, то есть, например, как показано на фиг. 13, банкнота застревает между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки. В ответ на это, контроллер 4a блоков переходит на этап SP12, фиг. 11B, посредством соединителя "b", чтобы определять, что произошло застревание, и затем переходит на следующий этап SP13.
На этапе SP13, контроллер 4a блоков останавливает двигатель наматывания и переходит на следующий этап SP14, и затем отключает двигатель доставки на этапе SP14. Соответственно, в дополнение к барабану 12, верхняя катушка 13 и нижняя катушка 14, ролики 25a и 25b доставки и ролики 26a и 26b перемещения также останавливаются, тем самым, завершая процедуру процесса разматывания RT с ошибкой. В соответствии с процедурой процесса разматывания RT, контроллер 4a блоков выполняет разматывание в операции возврата в исходное положение.
Таким образом, временное хранилище 4 выполняет, при разматывании банкнот в операции возврата в исходное положение, отслеживание включенного/выключенного состояния посредством датчика 29 застревания без использования числа импульсов, сохраненного при наматывании. Соответственно, даже, когда отношение между сохраненным числом импульсов и положением банкноты становится отличающимся от фактического состояния, возможно обнаруживать застревание, происходящее между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки.
Во временном хранилище 4, одно устройство датчика 29 застревания располагается в заднем конце нижней подвижной направляющей 21 и другое устройство располагается на стороне верхней подвижной направляющей 20 выше упомянутого первым, так что оптическая ось 29a датчика 29 застревания проходит между верхней поверхностью заднего конца нижней подвижной направляющей 21 и нижней поверхностью верхней подвижной направляющей 20 выше. Другими словами, датчик 29 застревания располагается в положении, где застревание скорей всего происходит, и застревание, когда происходит, может надежно обнаруживаться.
Поэтому, временное хранилище 4 может обнаруживать, посредством датчика 29 застревания, застревание, происходящее между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки.
В дополнение, датчик 29 застревания располагается в середине между верхней лентой 15 и нижней лентой 17 на левой стороне (L) и верхней лентой 15 и нижней лентой 17 на правой стороне (R). Соответственно, даже, когда намотанная банкнота перекашивается, и угол банкноты смещается вовне верхней ленты 15 и нижней ленты 17 на ближней стороне или вовне верхней ленты 15 и нижней ленты 17 на дальней стороне, и проходит конец верхней поверхности заднего конца нижней подвижной направляющей 21, временное хранилище 4 ошибочно не обнаруживает застревание. То есть, возможно корректно обнаруживать истинное застревание.
Таким образом, в соответствии с вариантом осуществления, временное хранилище 4 является свободным от ошибочного обнаружения, которое бы вызывалось использованием числа импульсов, сохраненного в памяти в течение наматывания, когда банкноты разматываются в операции возврата в исходное положение, и может, таким образом, корректно обнаруживать застревание между барабаном 12 и роликами 25a и 25b доставки. Таким образом, временное хранилище 4 может более надежно обнаруживать ненормальность при наматывании банкнот в сравнении с предшествующим уровнем техники.
В вышеописанном варианте осуществления, настоящее изобретение применялось к временному хранилищу 4, выполненному с возможностью для наматывания банкнот вокруг барабана 12, при этом противоположные боковые границы банкнот захватываются посредством четырех лент 15 и 17, которые отдельно обеспечиваются вертикально и поперечно и состоят из пары верхних лент 15 и пары нижних лент 17, обеспеченных на противоположных сторонах по отношению к направлению перемещения банкноты.
Настоящее изобретение не может быть ограничено этим, но предпочтительно применяется к многообразию устройств хранения средства обращения. Например, изобретение может применяться, относительно главного корпуса 10 устройства, к другим типам временного хранилища, в которых осуществляется намотка банкнот при удержании их между двумя лентами, составленными из верхней ленты на левой стороне (L) и верхней ленты на правой стороне (R) по отношению к поперечному направлению, и барабаном, или в которых осуществляется намотка банкнот при удержании их между одной верхней лентой и барабаном, или в которых осуществляется намотка банкнот вокруг барабана при удержании их между парой лент, составленных из верхней и нижней ленты. Изобретение также может применяться к временному хранилищу, имеющему три или более лент, обеспеченных по отношению к поперечному направлению.
Например, если только одна лента располагается на верхней стороне или две ленты располагаются так, что одна располагается на верхней и другая на нижней стороне, то есть, если только одна лента располагается по отношению к поперечному направлению, как показано на фиг. 14, одно устройство датчика 40 застревания может располагаться в заднем конце нижней подвижной направляющей 41 и рядом с лентой 42 в направлении ширины. В этом случае, упомянутое одно устройство датчика 40 застревания может располагаться либо рядом с левой и правой сторонами (L, R) ленты 42, либо располагаться на обеих левой и правой сторонах.
Также в случае, где верхние ленты располагаются так, что одна располагается на левой стороне и другая на правой стороне, или верхняя лента и нижняя лента соответственно располагаются на слева и справа, то есть, где две ленты располагаются по отношению к поперечному направлению, это устройство может располагаться не только в середине между боковыми лентами, но также на обеих или какой-либо из боковых сторон по отношению к каждой ленте. Дополнительно, если три ленты расположены по отношению к поперечному направлению, это устройство может располагаться на обеих или какой-либо из боковых сторон по отношению к каждой ленте.
Другими словами, упомянутое одно устройство датчика застревания может располагаться в заднем конце нижней подвижной направляющей 201 между лентами или рядом с лентой в направлении ширины.
В дополнение, не только к этому, например, если лента является полупрозрачной, обеспечивая возможность оптической оси датчика застревания проходить насквозь, упомянутое одно устройство датчика застревания может располагаться на внутренней стороне ленты, так что оптическая ось проходит через ленту.
Если обеспечивается множество датчиков застревания, например, они могут быть выполнены с возможностью так, чтобы определять застревание, когда один из множества датчиков застревания обнаруживает застревание, или чтобы определять застревание, когда предопределенное количество датчиков среди множества датчиков застревания обнаруживают застревание.
В варианте осуществления, описанном выше, одно устройство датчика 29 застревания располагается в заднем конце нижней подвижной направляющей 201 и другое устройство располагается на стороне верхней подвижной направляющей 20 выше упомянутого одного устройства. Однако другое устройство может располагаться внутри верхней подвижной направляющей 20. В последнем случае, даже когда верхняя подвижная направляющая 20 и нижняя подвижная направляющая 21 поворачиваются, оптическая ось датчика 29 застревания не смещается по отношению к ним, таким образом, делая возможным более надежное обнаружение застревания.
Дополнительно, не ограничивая вышеописанное, светоизлучающее устройство и светочувствительное устройство датчика 29 застревания могут обеспечиваться в любых положениях при условии, что оптическая ось располагается поперек пути перемещения банкнот между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки. В таком случае, например, оптическая ось может преломляться посредством оптической системы, такой как призма, тем самым, увеличивая степень свободы положений светоизлучающего устройства и светочувствительного устройства.
Дополнительно, датчик 29 застревания не может быть ограниченным фотоэлектрическим датчиком, состоящим из светоизлучающего устройства и светочувствительного устройства, но, по существу, он может быть любыми типами датчика, при условии, что он выполнен с возможностью отслеживания банкнот между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки.
Более того, в варианте осуществления, описанном выше, датчик 29 застревания размещается между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки, и датчик 28 доставки размещается между роликами 25a, 25b доставки и роликами 26a, 26b перемещения. Не ограничивая это, датчик 28 доставки может пропускаться и функция датчика 28 доставки может осуществляться посредством датчика 29 застревания.
В таком выполнении, за исключением операции возврата в исходное положение, т.е. в нормальной работе, датчик 29 застревания используется для работы также как датчик 28 доставки, как описано со ссылкой на фиг. 5A по 8C, возможно осуществлять функцию датчика 28 доставки посредством датчика 29 застревания. В противоположность, в операции возврата в исходное положение, как описано относительно процедуры процесса разматывания RT, возможно использовать датчик 29 застревания.
Таким образом, возможно упрощать конфигурацию временного хранилища 4 в пропорции к пропуску датчика 28 доставки, чтобы, тем самым, уменьшать стоимость производства.
Вышеописанный вариант осуществления выполнен с возможностью использовать шаговый двигатель для двигателя наматывания, чтобы сохранять число импульсов в памяти в моменты времени, когда датчик 28 доставки переходит в проводящее/непроводящее состояние, и чтобы определять, на основе числа импульсов, в каком положении на барабане 12 банкноты намотаны вокруг.
Это не может быть ограничительным, но для двигателя наматывания могут использоваться двигатель постоянного тока (DC) и кодировщик вместо шагового двигателя, и угол вращения, полученный из вывода кодировщика, может сохраняться в памяти вместо числа импульсов. В дополнение, не только к этому, другие типы двигателя, нежели описанные выше, могут использоваться для двигателя наматывания при условии, что они имеют их механизм с аналогичной функцией.
В вышеописанном варианте осуществления, когда банкнота разматывается в операции возврата в исходное положение, отслеживание включенного/выключенного состояния посредством датчика 29 застревания ограничивается в терминах времени. Однако это не является ограничительным, но, вместо времени, для ограничения может использоваться количество вращений двигателя наматывания. В этом случае, предельное количество импульсов, показывающих ограниченное количество вращений, может устанавливаться так, что отслеживание включенного/выключенного состояния может выполняться до тех пор, когда количество импульсов, полученное от двигателя наматывания, достигает это предельное количество импульсов.
В вышеописанной процедуре процесса разматывания RT на этапе SP11, контроллер 4a блоков определяет возможность наступления неисправности устройства на этапе SP11 и обнаруживает наступление застревания на этапе SP12. Контроллер 4a блоков может быть выполнен с возможностью передавать такой результат определения, например, в главный контроллер автоматического устройства 1 проведения сделок, и главный контроллер может быть выполнен с возможностью отображать результат определения как ошибку, например, на дисплее, не показан, для служебного обслуживания и управления. Является, таким образом, возможным подходящим образом уведомлять сервисный и управляющий персонал о том, какая ошибка произошла во временном хранилище 4.
Более того, в вышеописанном варианте осуществления, пара роликов 25a и 25b доставки размещаются поперек пути 23 перемещения. Однако не только для этого, какой-либо один из роликов доставки может быть достаточным, и этот одиночный ролик доставки может вращаться, чтобы обеспечивать удержание банкнот у верхней подвижной направляющей 20 или нижней подвижной направляющей 21, чтобы посылать их. Это аналогичным образом применимо к роликам 26a и 26b перемещения.
В вышеописанном варианте осуществления, настоящее изобретение применялось к временному хранилищу 4 как устройству хранения средства обращения. Настоящее изобретение не может быть ограниченным этим, но может применяться к другим типам временного хранилища устройства, обеспечивающим перемещение средства обращения, подобного листам или подобного полоскам, другого, нежели банкноты. В сущности, настоящее изобретение может применяться к любому типу устройства хранения средства обращения, выполненному с возможностью наматывания и хранения переданного средства обращения вокруг, в общем, цилиндрического носителя, такого как барабан, и разматывания и снятия сохраненного средства обращения с барабана.
Дополнительно, в вышеописанном варианте осуществления, в качестве конкретного примера, временное хранилище 4 как устройство хранения средства обращения обеспечивается датчиком 29 застревания, который действует как датчик в блоке отслеживания для отслеживания банкнот между положением Pa начала наматывания барабана 12 и точкой Pb зажима роликов 25a и 25b доставки, и контроллером 4a блоков, который действует как блок отслеживания. Однако это не может быть ограничивающим, но вместо них временное хранилище 4 может обеспечиваться другим датчиком или контроллером при условии, что он действует аналогично датчику 29 застревания или контроллеру 4a блоков.
В вышеописанном варианте осуществления, настоящее изобретение применяется к автоматическому устройству 1 кассовых операций в качестве устройства обработки средства обращения. Настоящее изобретение не может быть ограничено этим, а может применяться к различным устройствам обработки средства обращения, таким как копировальная машина, торговый автомат или торговый автомат по продаже билетов, обрабатывающим средство обращения, другое, нежели банкноты, при условии, что они могут обеспечиваться устройством хранения средства обращения, выполненным с возможностью наматывания и хранения средства обращения вокруг барабана, и разматывания и снятия сохраненного средства обращения с барабана.
Полное раскрытие японской патентной заявки номер 2011-224973, поданной 12 октября, 2011, в том числе описание, формула изобретения, сопроводительные чертежи и реферат раскрытия, включено сюда путем ссылки в своей полноте.
В то время как настоящее изобретение было описано со ссылкой на конкретные варианты осуществления, оно не ограничено упомянутыми вариантами осуществления. Следует принять во внимание, что специалисты в данной области техники могут изменять или модифицировать варианты осуществления без отклонения от объема и сущности настоящего изобретения.





Устройство хранения средства обращения содержит барабан, наматывающий средство обращения и хранящий его вокруг своей круглой поверхности. Ролик доставки, посылающий средство обращения, приходящее из отверстия входа/выхода для наматывания, чтобы посылать средство обращения к упомянутому барабану, и разматывающий средство обращения, размотанное с упомянутого барабана, в упомянутое отверстие входа/выхода для разматывания. Блок отслеживания, отслеживающий путь перемещения для средства обращения между положением начала наматывания упомянутого барабана и упомянутым роликом доставки. При этом упомянутый блок отслеживания включает в себя датчик, который имеет излучатель света, излучающий световой луч, и оптический датчик, принимающий световой луч на оптической оси, и контроллер. Оптическая ось располагается поперек пути перемещения, упомянутый датчик переходит в проводящее состояние или непроводящее состояние в соответствии с тем, преграждается ли или нет оптическая ось средством обращения. При этом упомянутый контроллер отслеживает, находится ли упомянутый датчик в проводящем состоянии или непроводящем состоянии, чтобы тем самым определять, находится ли или нет средство обращения в пути перемещения в ненормальном состоянии.
2 н. и 7 з.п. ф-лы, 14 ил.
1. Устройство хранения средства обращения, содержащее:
барабан, наматывающий средство обращения и хранящий его вокруг своей круглой поверхности;
ролик доставки, посылающий средство обращения, приходящее из отверстия входа/выхода для наматывания, чтобы посылать средство обращения к упомянутому барабану, и разматывающий средство обращения, размотанное с упомянутого барабана, в упомянутое отверстие входа/выхода для разматывания; и
блок отслеживания, отслеживающий путь перемещения для средства обращения между положением начала наматывания упомянутого барабана и упомянутым роликом доставки,
причем упомянутый блок отслеживания отслеживает путь перемещения независимо от величины вращения упомянутого барабана, полученной при наматывании,
при этом упомянутый блок отслеживания включает в себя датчик, который имеет излучатель света, излучающий световой луч, и оптический датчик, принимающий световой луч на оптической оси, и контроллер,
при этом оптическая ось располагается поперек пути перемещения, упомянутый датчик переходит в проводящее состояние или непроводящее состояние в соответствии с тем, преграждается ли или нет оптическая ось средством обращения,
при этом упомянутый контроллер отслеживает, находится ли упомянутый датчик в проводящем состоянии или непроводящем состоянии, чтобы, тем самым, определять, находится ли или нет средство обращения в пути перемещения в ненормальном состоянии.
2. Устройство по п.1, дополнительно содержащее направляющую, которая направляет средство обращения от окрестности отверстия входа/выхода к окрестности упомянутого барабана,
при этом упомянутый ролик доставки располагается в середине упомянутой направляющей,
при этом оптическая ось располагается так, чтобы проходить верхний конец упомянутой направляющей рядом с упомянутым барабаном.
3. Устройство по п.2, дополнительно содержащее ленту, поддерживающую средство обращения и наматывающую средство обращения вокруг упомянутого барабана, при этом средство обращения прижимается к круглой поверхности.
4. Устройство по п.3, в котором две ленты в качестве упомянутой ленты располагаются относительно продольного направления упомянутого барабана, так что упомянутые две ленты прижимают один конец и другой конец средства обращения к упомянутому барабану, тем самым наматывая средство обращения вместе с упомянутыми двумя лентами вокруг упомянутого барабана.
5. Устройство по п.4, в котором оптическая ось располагается так, чтобы проходить между упомянутыми двумя лентами.
6. Устройство по п.3, в котором оптическая ось располагается так, чтобы проходить рядом с упомянутой лентой в направлении ширины упомянутой ленты.
7. Устройство по п.1, в котором упомянутый контроллер определяет, застревает ли или нет средство обращения, согласно тому, проходит ли или нет средство обращения оптическую ось в пределах предварительно определенного предельного времени.
8. Устройство по п.7, в котором предварительно определенное предельное время выбирается на основе скорости перемещения и длины в направлении перемещения средства обращения.
9. Устройство обработки средства обращения, содержащее:
барабан, наматывающий средство обращения и хранящий его вокруг своей круглой поверхности;
ролик доставки, посылающий средство обращения, приходящее из отверстия входа/выхода, к упомянутому барабану для наматывания, чтобы посылать средство обращения к упомянутому барабану, и разматывающий средство обращения, размотанное с упомянутого барабана, в упомянутое отверстие входа/выхода для разматывания; и
блок отслеживания, отслеживающий путь перемещения для средства обращения между положением начала наматывания упомянутого барабана и упомянутым роликом доставки,
при этом упомянутый блок отслеживания отслеживает путь перемещения независимо от величины вращения упомянутого барабана, полученной при наматывании,
при этом упомянутый блок отслеживания включает в себя датчик, который имеет излучатель света, излучающий световой луч, и оптический датчик, принимающий световой луч на оптической оси, и контроллер,
при этом оптическая ось располагается поперек пути перемещения, упомянутый датчик переходит в проводящее состояние или непроводящее состояние в соответствии с тем, преграждается ли или нет оптическая ось средством обращения,
при этом упомянутый контроллер отслеживает, находится ли упомянутый датчик в проводящем состоянии или непроводящем состоянии, чтобы, тем самым, определять, находится ли или нет средство обращения в пути перемещения в ненормальном состоянии.
| JP 2011018172 A, 27.01.2011 | |||
| US 2003205618 A1, 06.11.2003 | |||
| Стенд для обкатки передач транспортных средств | 1985 |
|
SU1291831A1 |

