ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Это изобретение относится к поверхности стабилизатора летательного аппарата и, в частности, к конфигурации поверхности горизонтального стабилизатора летательного аппарата.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Прямая стреловидность аэродинамической поверхности летательного аппарата или наклон этих аэродинамических поверхностей к направлению полета является конструктивным признаком летательных аппаратов, которые летают со скоростями, приближающимися к скорости звука, и она обусловлена условиями аэродинамики. Аэродинамическое преимущество прямой стреловидности состоит в том, что отрицательные воздействия сжимаемости, вызванные превышением скорости потока по аэродинамическому профилю, которая растет с увеличением относительной толщины этого профиля, относятся к компоненту скорости потока воздуха, который по существу перпендикулярен линии четверти хорды аэродинамической поверхности летательного аппарата. Поэтому для данной скорости полета аэродинамическая поверхность с данным углом стреловидности будет объектом воздействий сжимаемости, равным воздействиям аэродинамической поверхности без прямой стреловидности, но с аэродинамическим профилем относительной толщины, равной косинусу угла стреловидности. Большая относительная толщина профиля, определяемая как отношение между максимальной толщиной профиля и его длиной в направлении полета или хорды, приводящая к меньшему весу конструкции аэродинамической поверхности из-за уменьшения воздействия усилий на обшивку аэродинамической поверхности, вызванных аэродинамической нагрузкой. Однако при полете с высокой скоростью, которая характерна для больших современных летательных аппаратов коммерческой авиации, аэродинамические поверхности с большими относительными толщинами аэродинамических профилей увеличивают отрицательные воздействия сжатия воздуха, которые могут проявляться как ударные волны на аэродинамические поверхности, с сопутствующим увеличением аэродинамического лобового сопротивления и других неблагоприятных явлений при полете. Таким образом, прямая стреловидность аэродинамических поверхностей служит для достижения конструкционного баланса между их конструкционным весом и приемлемыми техническими характеристиками полета при скоростях, близких к скорости звука.
Первый летательный аппарат, созданный для высокоскоростного полета со значительным углом стреловидности, был Юнкерс 287 в 1945. Среди других уникальных особенностей этого летательного аппарата был отрицательный угол стреловидности крыльев, т.е. законцовки крыла перемещены вперед в направлении полета относительно корневой части или соединения крыльев с фюзеляжем. Помимо всего лишь нескольких исключений, таких как MBB/HFB 320, Груман X-29 и Сухой 47 (все с крыльями обратной стреловидности), огромное большинство высокоскоростных летательных аппаратов создается с крыльями прямой стреловидности. Несмотря на определенные аэродинамические преимущества обратной стреловидности, основная причина использования прямой стреловидности крыльев состоит в том, что когда летательный аппарат входит в вертикальный порыв ветра во время полета, изгибающая деформация крыла с прямой стреловидностью имеет тенденцию уменьшения местного угла атаки профилей крыла, который естественно снижает аэродинамические нагрузки. В случае крыла с обратной стреловидностью наблюдается противоположный эффект, т.к. после вхождения в вертикальный порыв ветра изгиб крыла приводит к увеличению углов атаки профилей, что ведет к увеличению нагрузок и изгиба.
Это означает, что крылья с обратной стреловидностью имеют тенденцию противостоять значительно более высоким нагрузкам порыва воздуха, чем крылья с прямой стреловидностью, и поэтому они более тяжелые.
Аэродинамические преимущества, связанные с конфигурацией аэродинамической поверхности с обратной стреловидностью, известны и описаны в технической литературе по аэронавигации. Эти преимущества могут быть сформулированы следующим образом:
- меньший угол стреловидности передней кромки аэродинамической поверхности с обратной стреловидностью по сравнению с аэродинамической поверхностью с прямой стреловидностью, оба для одного и того же угла стреловидности по линии четверти хорды, приводит к уменьшению тенденции перемещения аэродинамического потока вдоль направления размаха крыла, с получающимся сокращением коэффициента трения в пограничном слое и, таким образом, уменьшению аэродинамического сопротивления;
- перемещение воздуха в направлении размаха крыла осуществляется от законцовки до корневой части в случае аэродинамической поверхности с обратной стреловидностью, что приводит к возможности достижения больших углов сваливания аэродинамической подъемной силы, чем в случае аэродинамических поверхностей с прямой стреловидностью, в которых поперечный поток воздуха в направлении размаха крыла тянет пограничный слой к краевой законцовке или кромке, уменьшая энергию пограничного слоя в этой зоне, что, т.к. она имеет более высокий коэффициент местной подъемной силы, чем корневая зона, приводит к разделению пограничного слоя с образующимся в результате сваливанием подъемной силы при меньшем угле атаки, чем в случае аэродинамической поверхности обратной стреловидности; тогда как больший угол сваливания поверхности стабилизатора с обратной стреловидностью позволяет увеличить максимальную аэродинамическую силу для данной поверхности или же уменьшить поверхность и, таким образом, аэродинамический вес и сопротивление этой аэродинамической поверхности для такой же максимальной аэродинамической силы, если это представляет собой решающее конструктивное соображение;
- упругая деформация аэродинамической поверхности под действием аэродинамической нагрузки или аэроупругая деформация имеет тенденцию к уменьшению местных углов атаки профилей в случае, когда поверхность имеет прямую стреловидность, и к их увеличению, если поверхность имеет обратную стреловидность, несмотря на образующееся увеличение градиента аэродинамической подъемной силы с углом атаки в случае аэродинамической поверхности обратной стреловидности; это увеличение градиента подъемной силы увеличивает маневренность летательного аппарата с обратной стреловидностью крыла, которое могло бы быть преимуществом в случае военного боевого летательного аппарата, но обычно рассматривается как недостаток для коммерческих летательных аппаратов, т.к. восприимчивость летательного аппарата к вертикальным порывам ветра связана с градиентом подъемной силы, с которым внутренние нагрузки и вес конструкции крыла также увеличиваются, и это представляет собой основную причину, которая объясняет тот факт, что крылья обратной стреловидности редко используются в гражданской авиации (вышеупомянутое увеличение градиента подъемной силы из-за аэроупругой деформации, связанное с поверхностью с обратной стреловидностью, является, однако, желательной в случае поверхности стабилизатора, т.к. это позволяет достичь значения аэродинамической силы, требуемого для функции стабилизации для меньших значений углов атаки такой поверхности).
Несмотря на известные аэродинамические преимущества, упомянутые выше, крылья обратной стреловидности имеют связанные с этим усложнения конструктивного воплощения, которые ограничивают их использование в проектировании летательных аппаратов; они могут быть сформулированы в следующем виде:
- Аэроупругая деформация имеет тенденцию к увеличению нагрузок на конструкцию и, таким образом, веса аэродинамической поверхности и особенно крыла; кроме того, увеличенный градиент подъемной силы крыла приводит к большей динамической восприимчивости летательным аппаратом турбулентности и вертикальных порывов ветра и, таким образом, к меньшему комфорту для пассажиров.
Однако в случае горизонтальной стабилизирующей поверхности обратной стреловидности эта большая аэродинамическая восприимчивость воздушных возмущений делает поверхность стабилизатора более эффективной в его функции восстановления положения самолета, когда он входит в зону турбулентности или вертикального порыва ветра во время полета, и, таким образом, она является желаемым эффектом в отличие от крыльев.
- Геометрия крыла обратной стреловидности усложняет встраивание шасси в низкорасположенное крыло коммерческого летательного аппарата, потому что задний лонжерон образует угол более 90 градусов с хвостовой частью фюзеляжа, к поверхностям стабилизатора это не относится.
- Из-за большего угла стреловидности задней кромки крыла системы создания подъемной силы закрылочного типа теряют аэродинамическую эффективность; это соображение также не относится к поверхности стабилизатора.
Известные недостатки, описанные выше, имеют место в основном в крыльях, но не на поверхности стабилизатора и, таким образом, поверхность горизонтального стабилизатора обратной стреловидности была бы более эффективной (с учетом размера, веса и аэродинамического сопротивления), чем поверхность горизонтального стабилизатора прямой стреловидности, если поверхности обоих стабилизаторов имеют аэродинамический фокус на таком же расстоянии от аэродинамического фокуса крыла, при этом аэродинамический фокус представляет собой характеристическую точку подъемной или стабилизирующей поверхности для расчета стабильности и управления.
Однако известного использования поверхностей горизонтального стабилизатора с обратной стреловидностью в летательных аппаратах для высокоскоростного полета не существует, включая упомянутые выше крылья с обратной стреловидностью.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, данное изобретение относится к области поверхностей стабилизатора летательного аппарата, и, в частности, раскрывает конфигурацию горизонтального стабилизатора, отличающуюся тем, что она имеет отрицательный угол стреловидности, и, таким образом, краевые кромки этого стабилизатора перемещены вперед относительно корневой части этого стабилизатора к фюзеляжу летательного аппарата в направлении полета как противоположность известной конфигурации. Кроме того, конфигурация конструкции вертикального стабилизатора и шпангоутов фюзеляжа летательного аппарата будут таковы, что будет возможно соединение горизонтального стабилизатора по изобретению с хвостовой частью фюзеляжа без необходимости того, чтобы фюзеляж имел конструкционное отверстие в зоне, сильно подвергаемой нагрузкам конструкции, введенным горизонтальными и вертикальными стабилизаторами, что является особенностью известной конфигурации и используется в большом современном коммерческом летательном аппарате.
В варианте осуществления настоящего изобретения конструкционное соединение горизонтального стабилизатора с фюзеляжем летательного аппарата выполнено между точками переднего лонжерона горизонтального стабилизатора и шпангоутом фюзеляжа таким образом, что конструкционного отверстия в оболочке фюзеляжа, подвергаемой введению нагрузок вертикальным и горизонтальным стабилизаторами, не требуется. Согласно настоящему изобретению для одного и того же летательного аппарата и абсолютного значения угла стреловидности к линии четверти местной хорды поверхности горизонтального стабилизатора, при этом удерживаются аэродинамические характеристики с учетом полетной сжимаемости на высокой скорости, аэродинамический фокус горизонтального стабилизатора согласно настоящему изобретению, где этот фокус представляет собой геометрическую точку, которая определяет стабилизационные характеристики горизонтального стабилизатора, расположен в положении, эквивалентном положению, которое было бы на горизонтальном стабилизаторе известной конфигурации.
Другими словами, посредством аэродинамического фокуса в том же самом положении, как и в известной конфигурации, стабилизационные характеристики улучшаются из-за положительного влияния отрицательного угла стреловидности, с помощью которого для такого же эффективного функционирования размер стабилизатора может быть уменьшен и, таким образом, может иметь место меньший вес, стоимость и лобовое сопротивление.
Основное преимущество конфигурации горизонтального стабилизатора в соответствии с изобретением относительно классической известной конфигурации состоит в том, что она устраняет конструкционные отверстия в фюзеляже, в зоне, сильно подверженной нагрузкам, введенным вертикальным и горизонтальным стабилизаторами. Следовательно, конструкционный вес фюзеляжа уменьшен при устранении усилений, требуемых для отверстия, и в то же самое время увеличена жесткость фюзеляжа в зоне установки горизонтального стабилизатора, что приводит к улучшению эффективности этого стабилизатора при уменьшении деформаций фюзеляжа при воздействии аэродинамической нагрузки.
Аналогично, посредством конфигурации горизонтального стабилизатора по изобретению и для достижения такой же эффективности, как у поверхности стабилизатора, возможно уменьшить площадь этой поверхности, так как деформация конструкции под воздействием аэродинамической нагрузки вызывает увеличение местных углов атаки, с образующимся при этом увеличением подъемной силы. В случае крыльев, это воздействие создает большие внутренние нагрузки в конструкции для поверхности неподвижного крыла, определяемые весом летательного аппарата и, таким образом, оно рассматривается как отрицательное, так как оно приводит к увеличению веса крыльев. В случае поверхности горизонтального стабилизатора, когда требуемая площадь этой поверхности стабилизатора определена скоростью увеличения аэродинамической силы с изменением угла атаки или градиента подъемной силы, например, вызванного возмущениями из-за вертикального порыва ветра во время полета, воздействие увеличения аэродинамической нагрузки из-за конструкционной гибкости этого стабилизатора с обратной стреловидностью ведет к увеличению этого градиента подъемной силы, таким образом позволяя уменьшить площадь поверхности стабилизатора.
Кроме того, эта конфигурация позволяет, если считается желательной, иметь отрицательный угол поперечного V на поверхности стабилизатора, т.е. чтобы иметь законцовки поверхности стабилизатора расположенными ниже корневой части. Летательные аппараты разработаны таким образом, что в случае взлета и посадки с высокими углами крена или сильным боковым наклоном самолета поверхности стабилизатора не касаются земли. Благодаря тому, что принимается во внимание стабильность и управление, каждый летательный аппарат будет иметь оптимальный угол поперечного V, либо положительный (выше корневой части), либо отрицательный (ниже корневой части). В случае, в котором оптимальный угол поперечного V является отрицательным, известные конфигурации поверхности горизонтального стабилизатора с прямой стреловидностью представляют геометрическое ограничение угла, который должен соблюдаться при взлете. Таким образом, из-за прямой стреловидности известных конфигураций поверхностей горизонтального стабилизатора, если они имеют отрицательный угол поперечного V, возможно, что произойдет контакт с землей в возможных положениях самолета около земли.
Другие особенности и преимущества настоящего изобретения представлены в последующем подробном описании иллюстративного варианта осуществления его объекта со ссылкой на сопровождающие чертежи.
ОПИСАНИЕ ЧЕРТЕЖЕЙ
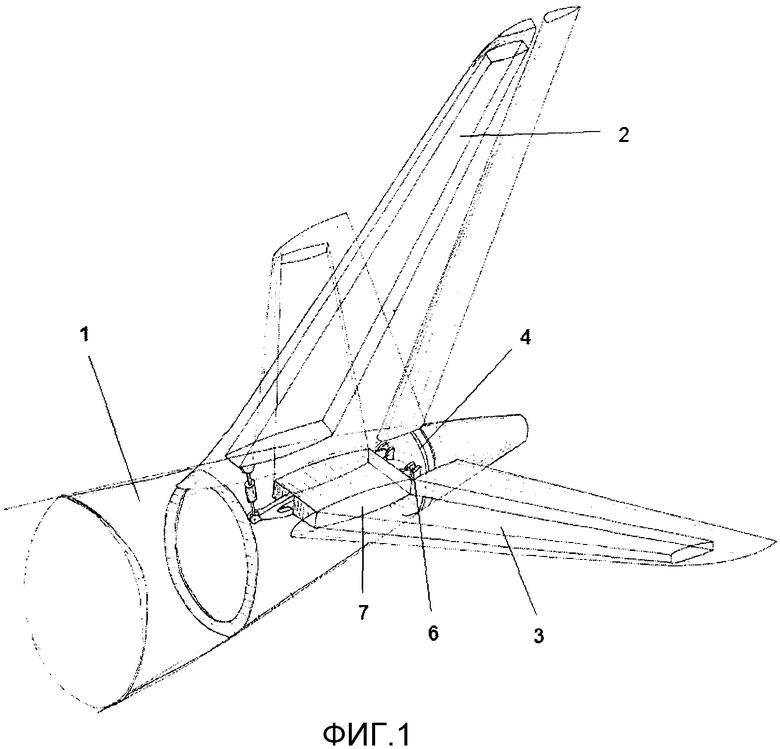
Фиг.1 изображает схематичный вид в перспективе хвостовой части фюзеляжа и стабилизаторы и рули направления современного коммерческого самолета, который схематично изображает расположение силовых приводов и крепеж закрылков горизонтального стабилизатора с прямой стреловидностью согласно известному уровню техники.
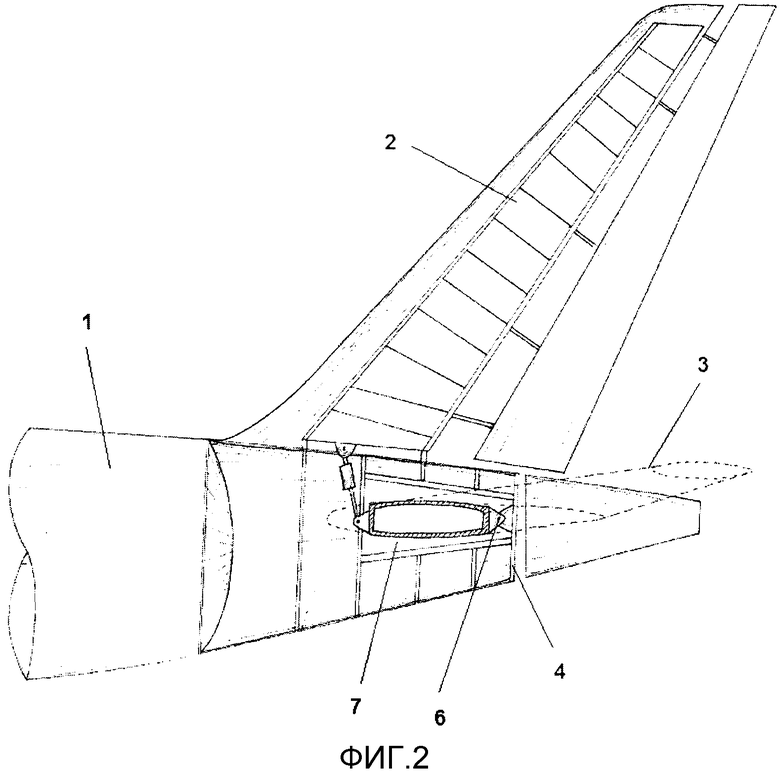
Фиг. 2 изображает схематичный вид с сечением по плоскости симметрии летательного аппарата хвостовой части фюзеляжа и стабилизаторов и рулей направления современного коммерческого самолета, который схематично изображает расположение силовых приводов, крепежа закрылков и конструкционных отверстий в фюзеляже для горизонтального стабилизатора с прямой стреловидностью согласно известному уровню техники.
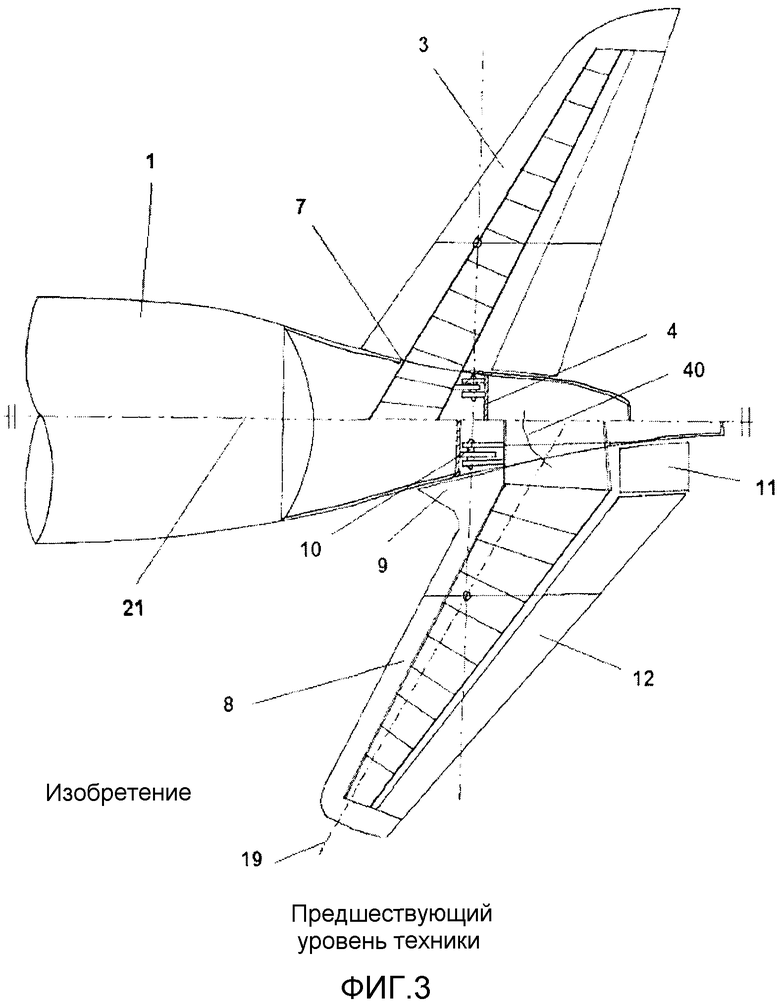
Фиг. 3 изображает детальный вид с сечением по горизонтальной плоскости хвостовой части фюзеляжа современного коммерческого летательного аппарата, в котором верхняя часть фигуры изображает горизонтальный стабилизатор с прямой стреловидностью и соединительный крепеж фюзеляжа, согласно известному уровню техники, и нижняя часть изображает горизонтальный стабилизатор с обратной стреловидностью согласно настоящему изобретению, содержащий конструкционный соединительный крепеж к фюзеляжу и расположение поверхностей управления.
Фиг. 4 изображает схематичный вид в перспективе хвостовой части фюзеляжа и стабилизаторы и рули направления современного коммерческого самолета, который схематично изображает расположение силовых приводов и крепежа закрылков для горизонтального стабилизатора с обратной стреловидностью согласно настоящему изобретению.
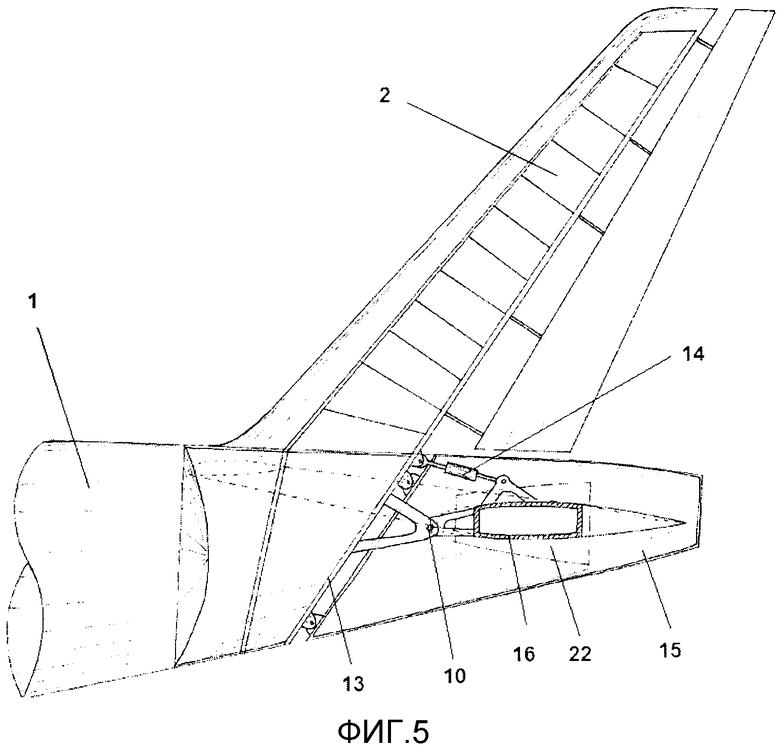
Фиг. 5 изображает схематичный вид с сечением по плоскости симметрии летательного аппарата хвостовой части фюзеляжа и стабилизаторов и рулей направления современного коммерческого самолета, который схематично изображает расположение силовых приводов, крепежа закрылков и конструкционное отверстие в фюзеляже для горизонтального стабилизатора с обратной стреловидностью согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Таким образом, настоящее изобретение относится к горизонтальному стабилизатору с обратной стреловидностью, расположенному на хвостовой части летательного аппарата, в котором положение аэродинамического фокуса равно положению аэродинамического фокуса эквивалентного горизонтального стабилизатора известной конфигурации. Кроме того, обратная стреловидность горизонтального стабилизатора по изобретению не нуждается в выполнении конструкционного отверстия в хвостовой части фюзеляжа, подверженной нагрузкам вертикального стабилизатора, и все это также делает возможным использование с выгодой аэродинамических преимуществ, связанных с обратной стреловидностью аэродинамических поверхностей.
Особенности горизонтального стабилизатора настоящего изобретения будут очевидны из описания предпочтительного варианта осуществления поверхности стабилизатора с обратной стреловидностью современного коммерческого самолета, как изображено на фиг. 3 (внизу), 4 и 5.
Таким образом, изобретение относится к поверхности 8 горизонтального стабилизатора с обратной стреловидностью, таким образом, что угол стреловидности 40, образованный проекцией базовой линии точек, расположенных на 25% местной хорды 19 поверхности 8 горизонтального стабилизатора на плоскость, перпендикулярную плоскости 21 симметрии летательного аппарата, и которая содержит направление полета летательного аппарата относительно плоскости 21 симметрии, составляет меньше чем 90 градусов (см. внизу фиг. 3), причем этот угол 40 измеряется в направлении полета. Угол поперечного V поверхности 8 горизонтального стабилизатора по изобретению может быть отрицательным, таким образом, что законцовка этой поверхности 8 расположена ниже корневой части этой поверхности 8 относительно фюзеляжа 1 летательного аппарата. Угол поперечного V представляет собой угол, образованный линией четверти хорды 19 поверхности 8 горизонтального стабилизатора относительно проекции этой линии на плоскость симметрии 21 летательного аппарата, и эта плоскость также параллельна направлению полета рассматриваемого летательного аппарата. Угол поперечного V поверхности 8 горизонтального стабилизатора может также быть положительным, означая, что законцовка этой поверхности 8 расположена выше корневой части этой поверхности 8 относительно фюзеляжа 1 летательного аппарата.
В этом изобретении конструкционное соединение поверхности 8 горизонтального стабилизатора с фюзеляжем 1 летательного аппарата достигается посредством замыкающего шпангоута 13 этого фюзеляжа 1, тем самым подразумевается, что наличие конструкционного отверстия 7, которое является обычным для известной конфигурации, изображенной на фиг. 1, 2 и 3 (вверху), где соединение выполнено посредством крепежных элементов 6, соединенных со шпангоутом 4, таким образом, что нагрузки, введенные в фюзеляж 1 вертикальным стабилизатором 2 и горизонтальным стабилизатором 3 непосредственно в секцию фюзеляжа 1, нарушенную конструкционным отверстием 7, требуют встраивания специальных усилений в этот фюзеляж 1. Конструкционное соединение между поверхностью 8 горизонтального стабилизатора и фюзеляжа 1 летательного аппарата согласно изобретению содержит по меньшей мере одно дополнительное соединение 14, которое обеспечивает конструкционную стабильность поверхности 8 и оно может соответствовать механизму 14 приведения в действие, что позволяет перестановку или поворот поверхности 8 стабилизатора вокруг оси, перпендикулярной плоскости 21 симметрии летательного аппарата, таким образом что секция фюзеляжа 1, которая получает и передает нагрузки вертикального стабилизатора 2, не содержит отверстие для установки поверхности 8 горизонтального стабилизатора.
Таким образом, поверхность 8 горизонтального стабилизатора настоящего изобретения является переставной, т.е. она может поворачиваться вверх или вниз на угол обычно менее 30 градусов в каждом направлении вокруг оси, перпендикулярной плоскости 21 симметрии летательного аппарата и она проходит через конструкционные опорные точки 10 к шпангоуту 13 фюзеляжа 1. Эта поверхность 8 стабилизатора поворачивается посредством приведения в действие механического устройства 14, которое может быть червячного типа или любого другого типа, используемого для перемещения поверхностей стабилизатора и для управления летательным аппаратом.
В настоящем изобретении хвостовая часть фюзеляжа 15 противостоит только аэродинамической и инерционной нагрузкам, а не нагрузкам, введенным горизонтальным стабилизатором 8 и вертикальным стабилизатором 2, и, таким образом, не требуется специальных усилений для конструкционного отверстия 22, необходимого для прохода центральной конструкции 16 стабилизатора 8.
Согласно варианту осуществления настоящего изобретения, передняя кромка горизонтального стабилизатора 8 содержит местное расширение 9 в направлении полета летательного аппарата, в зоне, смежной с фюзеляжем 1. Местное расширение 9 предпочтительно имеет по существу треугольную форму и разработано для смещения потери скорости потока воздуха в пограничном слое фюзеляжа 1, таким образом, что это предотвращает образование подковообразных завихрений вокруг корневой части поверхности этого стабилизатора 8 у этого фюзеляжа 1 при малых углах атаки этой поверхности 8 горизонтального стабилизатора.
Расширение 9 передней кромки поверхности 8 горизонтального стабилизатора в зоне, смежной с фюзеляжем 1 летательного аппарата разработана так, что радиус кривизны передней кромки этого расширения 9 меньше, чем на остальной части передней кромки горизонтального стабилизатора 8, чтобы вызвать управляемое разделение аэродинамического потока при больших углах атаки этой поверхности 8 в форме вихря, который задерживает обобщенное разделение аэродинамического потока над этой поверхностью 8 стабилизатора, известное как сваливание, и который, поэтому, увеличивает максимальный угол атаки, при котором эта поверхность 8 стабилизатора эффективна.
Согласно варианту осуществления изобретения участок задней кромки горизонтального стабилизатора 8, самый близкий к плоскости 21 симметрии летательного аппарата, по существу перпендикулярен к этой плоскости.
В варианте осуществления изобретения по меньшей мере один участок задней кромки горизонтального стабилизатора 8 в части, самой близкой к плоскости 21 симметрии летательного аппарата, имеет намного меньший угол стреловидности, чем на внешнем участке задней кромки, таким образом, что внутренняя зона горизонтального стабилизатора 8 содержит по меньшей мере одну поверхность управления, называемую внутренним рулем 11 высоты, где задняя кромка этого внутреннего руля 11 высоты по существу перпендикулярна плоскости 21 симметрии. В свою очередь, горизонтальный стабилизатор 8 содержит по меньшей мере одну поверхность управления, называемую внешним рулем 12 высоты, который занимает участок, дальний от плоскости 21 симметрии летательного аппарата, во внешней зоне задней кромки этой поверхности 8.
Эти модификации, включенные в объем изобретения, определенные следующими пунктами формулы изобретения, могут быть введены в варианты осуществления, описанные выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| АЭРОДИНАМИЧЕСКАЯ ПОВЕРХНОСТЬ И ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2667410C1 |
| ПЛАНЕР ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2645522C1 |
| Беспилотный летательный аппарат | 2023 |
|
RU2818209C1 |
| ОБЛАДАЮЩАЯ СОПРОТИВЛЯЕМОСТЬЮ ШТОПОРУ КОНФИГУРАЦИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2640669C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2495796C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ, ИМЕЮЩИЙ ЛЯМБДА-ОБРАЗНУЮ КОРОБЧАТУЮ КОНФИГУРАЦИЮ КРЫЛА | 2010 |
|
RU2531537C2 |
| СВЕРХЗВУКОВОЙ САМОЛЕТ С КРЫЛЬЯМИ ЗАМКНУТОЙ КОНСТРУКЦИИ | 2015 |
|
RU2591102C1 |
| ВЫСОКОМАНЕВРЕННЫЙ САМОЛЕТ | 2017 |
|
RU2682700C2 |
| ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2658739C1 |
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
Поверхность (8) горизонтального стабилизатора летательного аппарата выполнена так, что угол стреловидности (40) поверхности (8) является углом, образованным проекцией базовой линии точек, расположенных на 25% местной хорды (19) поверхности (8) горизонтального стабилизатора на плоскость, перпендикулярную плоскости (21) симметрии летательного аппарата. Плоскость содержит направление полета летательного аппарата относительно плоскости (21) симметрии летательного аппарата и составляет меньше чем 90 градусов. Угол (40) измеряется в направлении полета летательного аппарата. Конструкционное соединение поверхности (8) горизонтального стабилизатора с фюзеляжем (1) летательного аппарата расположено на замыкающем шпангоуте (13) фюзеляжа (1). Конструкционное соединение между поверхностью (8) горизонтального стабилизатора и фюзеляжем (1) летательного аппарата содержит дополнительное соединение (14), прикрепленное к центральной конструкции (16) поверхности (8), которое обеспечивает конструкционную стабильность этой поверхности (8). Изобретение направлено на повышение эффективности горизонтального стабилизатора. 10 з.п. ф-лы, 5 ил.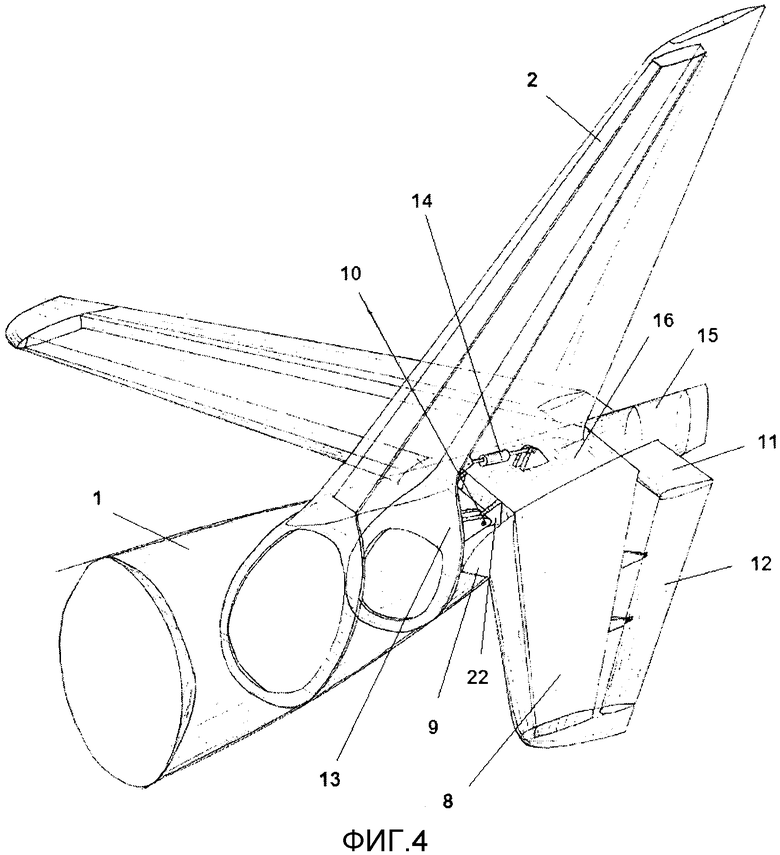
1. Поверхность (8) горизонтального стабилизатора летательного аппарата, отличающаяся тем, что угол стреловидности (40) этой поверхности (8), являющийся углом (40), образованным проекцией базовой линии точек, расположенных на 25% местной хорды (19) поверхности (8) горизонтального стабилизатора на плоскость, перпендикулярную плоскости (21) симметрии летательного аппарата, причем эта плоскость содержит направление полета летательного аппарата относительно плоскости (21) симметрии летательного аппарата, составляет меньше чем 90 градусов, причем этот угол (40) измеряется в направлении полета летательного аппарата, при этом конструкционное соединение этой поверхности (8) горизонтального стабилизатора с фюзеляжем (1) летательного аппарата расположено на замыкающем шпангоуте (13) этого фюзеляжа (1), причем конструкционное соединение между поверхностью (8) горизонтального стабилизатора и фюзеляжем (1) летательного аппарата содержит по меньшей мере одно дополнительное соединение (14), прикрепленное к центральной конструкции (16) поверхности (8), которое обеспечивает конструкционную стабильность этой поверхности (8).
2. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.1, отличающаяся тем, что дополнительное соединение (14) таково, что позволяет перестановку или поворот этой поверхности (8) стабилизатора вокруг оси, перпендикулярной плоскости (21) симметрии летательного аппарата.
3. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.2, отличающаяся тем, что перестановка или поворот этой поверхности (8) стабилизатора - менее 30° в каждом направлении поворота.
4. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.1, отличающаяся тем, что положение аэродинамического фокуса поверхности (8) этого стабилизатора расположено в положении, эквивалентном положению в горизонтальном стабилизаторе прямой стреловидности, для одного и того же летательного аппарата и такого же абсолютного значения угла стреловидности линии четверти местной хорды (19) поверхности (8).
5. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.1, отличающаяся тем, что конфигурация этой поверхности (8) такова, что она имеет отрицательный угол поперечного V, так что законцовка этой поверхности (8) расположена ниже корневой части этой поверхности (8) относительно фюзеляжа (1), при этом угол поперечного V представляет собой угол, образованный линией четверти хорды (19) поверхности (8) горизонтального стабилизатора относительно проекции этой линии на плоскость, перпендикулярную плоскости симметрии (21) летательного аппарата.
6. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.1, отличающаяся тем, что конфигурация этой поверхности (8) такова, что она имеет положительный угол поперечного V, так что законцовка этой поверхности (8) расположена выше корневой части этой поверхности (8) относительно фюзеляжа (1), при этом угол поперечного V представляет собой угол, образованный линией четверти хорды (19) поверхности (8) горизонтального стабилизатора относительно проекции этой линии на плоскость, перпендикулярную плоскости симметрии (21) летательного аппарата.
7. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.1, отличающаяся тем, что передняя кромка этой поверхности (8) горизонтального стабилизатора содержит местное расширение (9) в направлении полета летательного аппарата в зоне, смежной с фюзеляжем (1) летательного аппарата для смещения потери скорости потока воздуха в пограничном слое фюзеляжа (1), таким образом, что оно предотвращает образование подковообразных завихрений вокруг корневой части поверхности (8) этого стабилизатора относительно этого фюзеляжа (1) при малых углах атаки этой поверхности (8) горизонтального стабилизатора.
8. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.7, отличающаяся тем, что местное расширение (9) передней кромки этой поверхности (8) горизонтального стабилизатора имеет по существу треугольную форму.
9. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.1, отличающаяся тем, что участок задней кромки этой поверхности (8), самый близкий к плоскости (21) симметрии летательного аппарата, по существу перпендикулярен этой плоскости (21) симметрии.
10. Поверхность (8) горизонтального стабилизатора летательного аппарата по п.1, отличающаяся тем, что она также содержит в своей зоне, самой ближней к плоскости (21) симметрии летательного аппарата, по меньшей мере одну поверхность управления, называемую внутренним рулем (11) высоты, причем задняя кромка этого внутреннего руля (11) высоты по существу перпендикулярна плоскости (21) симметрии летательного аппарата.
11. Поверхность (8) горизонтального стабилизатора летательного аппарата по любому из предыдущих пунктов, отличающаяся тем, что она также содержит по меньшей мере одну поверхность управления, называемую внешним рулем (12) высоты, расположенную на участке, наиболее удаленном от плоскости (21) симметрии летательного аппарата, во внешней зоне задней кромки этой поверхности (8).
| US 6824092 B1, 30.11.2004 | |||
| ЖИТОМИРСКИЙ Г.И | |||
| Конструкция самолетов, М | |||
| Машиностроение | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Аппарат для передачи изображений на расстояние | 1920 |
|
SU171A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Энциклопедия, Авиация, Научное издательство Большая Российская Энциклопедия, ЦАГИ, 1994, с.232 | |||
| RU 2055778 C1, 10.03.1996 | |||

