Изобретение относится к области авиационной техники и может быть использовано в конструкции палубных вертолетов-самолетов-амфибий с двухкилевым оперением, двухвинтовыми несущей и движительно-несущей системами, имеющими с противоположным вращением разновеликие винты соответственно консольные большие и поворотные задние меньшие, обеспечивающие вертикальный и короткий взлет/посадку (ВВП и КВП), но и горизонтальный скоростной полет при зафиксированных лопастях-крыльях однолопастных больших винтов, смонтированных на законцовках переднего большего крыла типа чайка дупланной схемы, включающей меньшее цельно-поворотное заднее крыло с межгондольными меньшими винтами.
Известен беспилотный палубный конвертоплан "Фрегат" ЗАО "Транзас" (РФ), содержащий из композитных материалов планер с килем, законцовка которого связана с задним крылом обратной стреловидности, образующим с передним стреловидным низко расположенным крылья замкнутой конструкции (КЗК), имеющую в ее центре по бокам фюзеляжа два поворотных кольцевых канала с винтами, создающими горизонтальную и соответствующим их отклонением вертикальную тягу, синхронизирующую трансмиссию валов, связывающую между собой два двигателя с поворотными винтами и хвостовым рулевым фенестроном, смонтированным за килем.
Признаки, совпадающие - наличие двух поворотных кольцевых каналов с тянущими винтами, преобразующими горизонтальную тягу в вертикальную соответствующим их отклонением вверх от горизонтального положения на угол 90°, диапазон поворота кольцевых каналов от 0° до +100°, вращение винтов - синхронизирующее. Крылья в системе КЗК большого удлинения, несущая система имеет два больших поворотных винта с меньшим кормовым рулевым фенестроном для продольного управления. Все винты и фенестрон без автоматов перекосов с управлением их общего и дифференциального изменения шага, но и вращательно связаны посредством Т-образной в плане синхронизирующей системы соединительных валов трансмиссии.
Причины, препятствующие поставленной задаче: первая - это то, что внешние консоли переднего крыла для уменьшения стояночной площадки выполнены складными, приведя его размах с 19 до 10 м и взлетную/стояночную площадь с 270,75 до 140,25 м2 соответственно при удельной взлетной/стояночной возможности по полезной нагрузке 3,6934/7,1301 кг/м2 при ПН=1 тонна. Вторая - это то, что диаметры винтов ограничены размахом внутренних секций заднего крыла КЗК, а взлетная мощность СУ 4800 л.с. предопределяет Dв=4,6 м и удельную нагрузку на ометаемую площадь винтами ρS=210,72 кг/м2 при взлетном весе 7 тонн. Третья - это то, что профилированные поворотные кольцевые каналы с винтами и с увеличением их угла атаки на переходных режимах полета, без наличия интегрирующего устройства управления тягой несущих и рулевого винтов создают опасность появления на поворотных каналах срыва потока до создания винтами необходимой подъемной силы, что ухудшает стабильность и продольную управляемость. Четвертая - это то, что рулевой фенестрон продольного управления, выполненный многолопастным с изменяемым шагом, установлен за вертикальным килем и смонтирован на конце хвостовой балки, что предопределяет использование специального интегрирующего устройства управления. Все это усложняет конструкцию, уменьшает надежность и ограничивает возможность повышения топливной эффективности, увеличения взлетного веса и весовой отдачи и, особенно, без возможности увеличения диаметра канальных винтов.
Известен беспилотный электроконвертоплан "Panther" корпорации IAI (Израиль), выполненный по двухбалочной схеме с высокорасположенным крылом, имеет двухкилевое П-образное оперение, смонтированное на разнесенных балках к консолям крыла, два передних поворотных, изменяющих ось вращения с горизонтальной на вертикальную, и один задний стационарный с вертикальной осью вращения электромоторы с тянущими винтами, размещенные соответственно в передних окончаниях разнесенных балок и на конце короткого фюзеляжа, систему управления и аккумуляторную батарею, трехстоечное колесное шасси, неубирающееся с передней опорой.
Признаки, совпадающие - наличие моноплана двухбалочной схемы с трехколесным шасси и передней опорой. Разнесенные балки соединяют крыло с двухкилевым П-образным хвостовым оперением. Системой управляют три электромотора с тянущими винтами, два передних из которых поворотные. Беспилотный электроконвертоплан (БЭКП) может подниматься на высоту порядка 3 км, находится без подзарядки батарей в воздухе до 6 часов и действовать в радиусе до 60 км от оператора при длительных полетах днем и ночью для телевизионного или инфракрасного наблюдения местности в реальном масштабе времени. Трехвинтовой "Panther" является тактическим разведывательным вертикально взлетающим беспилотным аппаратом, сочетающим в себе преимущества и вертолета, и самолета. БЭКП "Panther" располагает поворотными электромоторами с тянущими винтами и, как вертолет, способен по командно-телеметрической радиолинии совершать вертикальный взлет, посадку и зависание.
Причины, препятствующие поставленной задаче: первая - это то, что БЭКП трехвинтовой несущей схемы с задним винтом постоянного шага на конце фюзеляжа, используемым только на вертолетных режимах полета, имеет из-за отсутствия возможности угла установки лопасти равным ϕ=0° повышенное аэродинамическое сопротивление на самолетных режимах полета, сложную схему управления электромоторами при независимом вращении трех равновеликих винтов на вертолетных режимах полета, малую весовую отдачу и радиус действия. Вторая - это то, что при висении поток от двух передних и одного заднего тянущих винтов, обдувая соответственно крыло от его носка и кормовую часть фюзеляжа, создают значительную общую потерю (порядка 14%) в вертикальной их тяге, затормаживается и большие скорости потока отбрасываемого от них предопределяют образование вихревых колец, которые на низких скоростях снижения могут резко уменьшать силу тяги винтов и создавать ситуацию неуправляемого падения, что снижает стабильность управления и безопасность. Третья - это то, что расположение в передних окончаниях разнесенных балок поворотных электромоторов с тянущими винтами предопределяет конструктивно сложные узлы их поворота и не возможность при попутном ветре выполнить зависание в воздухе, что усложняет конструкцию и уменьшает надежность. Четвертая - это то, что диапазон высот применения БЭКП - 100…3500 м при взлетном его весе 65 кг.
Наиболее близким к предлагаемому изобретению является многоцелевой многовинтовой вертолет-самолет (Патент RU 2448869, 03.12.2010), содержащий на консолях крыла две гондолы, в передних и задних окончаниях которых размещены соответственно тянущие и толкающие поворотные винты, имеет хвостовое оперение, двигатели силовой установки (СУ), передающие валами трансмиссии мощность на поворотные винты, создающие горизонтальную и их соответствующим отклонением вертикальную тягу и трехопорное колесное шасси с носовой вспомогательной опорой.
Признаки, совпадающие - наличие высокорасположенного крыла, снабженного двухкилевым оперением и двумя мотогондолами, каждая из которых имеет переднюю и заднюю продолговатые, вынесенные за соответствующие кромки крыла, поворотные ее части с винтами. Поворотные тянущие и толкающие винты, расположенные соответственно спереди и сзади крыла, обеспечивают горизонтальную тягу и соответствующим отклонением вверх и вниз от горизонтального положения вертикальную на угол 90° или наклонную тягу на угол 65° соответственно при ВВП и КВП.
Причины, препятствующие поставленной задаче: первая - это то, что крыльевые мотогондолы с расположенными в них газотурбинными двигателями, имеющими сопла для выхлопа, направленные с боку и назад, осуществляют вредную обдувку задних поворотных толкающих винтов на вертолетных и на самолетных режимах его полета. Вторая - это то, что расположенные на крыльевых мотогондолах тандемом поворотные винты одинакового диаметра и, особенно задние, отклоняющиеся вниз, имеют радиусы, не превышающие высоту установки мотогондол на крыле, что ограничивает взлетный его вес. Кроме того, это также усложняет конструкцию крыла с надкрыльными мотогондолами и, как следствие, увеличивает массу его крыла. Третья - это то, что традиционная аэродинамическая его схема, у которой основную подъемную силу, необходимую для полета, создает крыло, являясь основной несущей аэродинамической поверхностью, а дополнительную подъемную силу - стабилизатор и фюзеляж, которые также являются аэродинамическими поверхностями, но их составляющая в общей аэродинамической подъемной силе с традиционной схемой незначительна. Поэтому возможность повышения маневренности при переходных маневрах и увеличения весовой отдачи при повышении взлетного веса и дальнейшего уменьшения массы конструкции, но и геометрических размеров планера весьма ограничено.
Предлагаемым изобретением решается задача в указанном выше известном многоцелевом многовинтовом вертолете-самолете увеличение аэродинамического качества и повышение маневренности при переходных маневрах и на малых скоростях полета при уменьшении скорости сваливания, повышение топливной эффективности и весовой отдачи, увеличение в 1,93 и 1,23 раза коэффициента поднятия в производстве подъемной силе соответственно при вертолетных и самолетных режимах полета.
Отличительными признаками предлагаемого изобретения от указанного выше известного многоцелевого многовинтового вертолета-самолета, наиболее близкого к нему, являются наличие того, что он выполнен с высокорасположенными разновеликими крыльями дупланной схемы, включающей переднее крыло типа чайка (КТЧ) большей площади и межгондольное меньшего размаха и площади цельно-поворотное заднее крыло (ЦЗК), но и по концепции поперечно-несущей винтовой системы (ПНВС), в которой левый и правый однолопастные большие несущие винты (НВ), установленные на законцовках внешних консолей КТЧ, закрепленных на верхних бортах подкрыльных мотогондол, смонтированных под развитыми изломами КТЧ, и обеспечивающие только вертикальный или короткий взлет/посадку (ВВП или КВП) с флюгерно-реверсивными тянущими меньшими винтами движительно-несущей системы (ДНС), смонтированными на ЦЗК, создавая требуемое большее продольное удаление ДНС-Х2 от центра масс, и работающими как совместно с большими НВ при выполнении ВВП и зависания, так и самостоятельно для создания маршевой тяги при скоростном горизонтальном полете и зафиксированных лопастях-крыльях больших НВ, размещенных на профилированных пилонах, вынесенных вперед от поперечной оси, проходящей через центр масс, создавая от него требуемое меньшее продольное удаление ПНВС-Х2, и снабжен возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета с ПНВС-Х2 и ДНС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДНС-Х2 соответственно с двумя большими НВ, работающими на режимах близких к их авторотации или при жестко закрепленных лопастях-крыльях больших НВ, зафиксированные лопасти которых остановлены и вынесены к оси симметрии от профилированных пилонов КТЧ над их консолями, увеличивая площадь КТЧ, а также несущую его способность совместно с ЦЗК не только за счет отклонения его средств механизации взлетно-посадочной конфигурации, но и образуя крыльями-лопастями бипланную аэродинамическую схему с консолями КТЧ, имеющего с ЦЗК удлинение (λби), составляющее величину λби=5,78 единиц и размах крыла (Lктч), определяемый из соотношения: Lктч=1,661⋅2Rнв, м (где: Rнв - радиус однолопастных НВ) и снабженным внутренними закрылками и внешними флапперонами, корневые хорды первых из них в  раза больше концевых хорд последних, так и обратно, при этом средняя аэродинамическая хорда (САХ) КТЧ, определяемая из соотношения:
раза больше концевых хорд последних, так и обратно, при этом средняя аэродинамическая хорда (САХ) КТЧ, определяемая из соотношения:  (где: bнв - САХ лопасти НВ), предопределяет при виде сверху совмещение каждой передней кромки больших НВ с передней кромкой КТЧ, но и их разнесение по вертикали так, что средние линии лопастей больших НВ, работающих по тянущей схеме, равноудалены от оси симметрии и размещены выше от и параллельно средней линии КТЧ на величину вертикального зазора (zнв), определяемого из соотношения: zнв=0,3⋅bктч, м (где: bктч - САХ консолей КТЧ), при этом большие НВ выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между большими НВ, например, при виде сверху левый и правый большие НВ вращаются соответственно против и по часовой стрелке так, что обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечно-продольного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком консолей КТЧ, причем трапециевидные в плане КТЧ, ЦЗК и лопасти-крылья НВ имеют разновеликие площади, которые составляют соответственно 52%, 25% и 23% от общей площади бипланной схемы крыльев, преобразующей с межгондольным ЦЗК смешанную аэродинамическую дупланную схему в продольный триплан со стабилизатором хвостового оперения, при этом трехлопастные меньшие НВ в ДНС-Х2 имеют как жесткое крепление лопастей и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими большими НВ в случае отказа двигателей СУ, так и при выполнении ВВП и зависания обеспечивают полную компенсацию реактивных крутящих их моментов при противоположном направлении вращения между меньшими НВ в ДНС-Х2, например, при виде сверху левый и правый меньшие НВ вращаются соответственно по часовой и против часовой стрелки так, что обеспечивают устранение гироскопического эффекта и гармоничное управление по рысканию совместно с большими НВ, причем система трансмиссии обеспечивает передачу мощности от двух, например, турбодизельных двигателей (ТДД), левый и правый из которых имеет задний вывод вала для отбора взлетной мощности и смонтирован в передней части соответствующей мотогондолы и связан посредством муфты сцепления с соответствующим Т-образным при виде сбоку промежуточным редуктором, снабженным двумя выходными потоками, первым нижними из них каждый ТДД передает крутящий момент посредством продольного вала с угловым редуктором и поперечным задним валом, проложенным в носке ЦЗК, на редуктор соответствующего меньшего винта ДНС-Х2, связанного с другим посредством синхронизирующего вала, а вторым из них потоком, передающим крутящий момент от каждого ТДД вертикальным выходным валом, который связан посредством муфты сцепления с соответствующим угловым редуктором, имеющим вертикальный вал, сцентрированный подшипниковым узлом внутри полого вала зубчатого сектора узла поворота каждой консоли КТЧ и связанные через второй угловой редуктор и посредством поперечного вала, проходящего в носке каждой внешней консоли КТЧ и ее профилированном пилоне, с консольным угловым редуктором соответствующего большего НВ в ПНВС-Х2, при этом левый и правый зубчатый сектор КТЧ, установленный на нижней поверхности его внешней консоли и изменяющий ее стреловидность посредством ее поворота вперед по полету в плоскости хорды КТЧ, смонтирован в соответствующем узле поворота на верхних бортах мотогондол так, что каждый из зубчатых секторов, имеющих необходимый центральный угол, находится в зацеплении и взаимодействует при этом с приводной шестерней соответствующего узла поворота консоли КТЧ, создающего перед взлетом при их повороте на угол от 0° до -6,5° требуемый угол стреловидности КТЧ от заданной центровки или от -6,5° до -90° - стояночную конфигурацию с предварительно зафиксированными лопастями-крыльями НВ, причем при выполнении ВВП и зависания каждым промежуточным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ПНВС-Х2 и ДНС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ равной ρN=3,4 кг/л.с., а на самолетных режимах полета только при остановленных и зафиксированных соответствующим образом лопастях-крыльях НВ над консолями КТЧ каждым промежуточным редуктором перераспределяется 46% от взлетной мощности СУ системой трансмиссии только на меньшие винты ДНС-Х2, но и обратно, при этом на палубе авианесущего корабля в транспортно-стояночной его конфигурации однолопастные НВ после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что лопасти-крылья направлены к узлам поворота консолей КТЧ, устанавливаемым внешние его левую и правую консоли после их поворота на угол 90° по часовой и против часовой стрелки при виде сверху соответственно совместно с лопастями-крыльями, размещенными при этом вдоль продольной оси соответствующих подкрыльных мотогондол так, что сами лопасти-крылья зафиксированы над сложенными консолями КТЧ и после их поворота вперед по полету размещены к передней кромке внутренних секций КТЧ, а их противовесы, направленные в противоположные стороны консолям КТЧ, разнесены при виде сверху по обе стороны от оси симметрии в носовой части фюзеляжа.
(где: bнв - САХ лопасти НВ), предопределяет при виде сверху совмещение каждой передней кромки больших НВ с передней кромкой КТЧ, но и их разнесение по вертикали так, что средние линии лопастей больших НВ, работающих по тянущей схеме, равноудалены от оси симметрии и размещены выше от и параллельно средней линии КТЧ на величину вертикального зазора (zнв), определяемого из соотношения: zнв=0,3⋅bктч, м (где: bктч - САХ консолей КТЧ), при этом большие НВ выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между большими НВ, например, при виде сверху левый и правый большие НВ вращаются соответственно против и по часовой стрелке так, что обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечно-продольного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком консолей КТЧ, причем трапециевидные в плане КТЧ, ЦЗК и лопасти-крылья НВ имеют разновеликие площади, которые составляют соответственно 52%, 25% и 23% от общей площади бипланной схемы крыльев, преобразующей с межгондольным ЦЗК смешанную аэродинамическую дупланную схему в продольный триплан со стабилизатором хвостового оперения, при этом трехлопастные меньшие НВ в ДНС-Х2 имеют как жесткое крепление лопастей и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими большими НВ в случае отказа двигателей СУ, так и при выполнении ВВП и зависания обеспечивают полную компенсацию реактивных крутящих их моментов при противоположном направлении вращения между меньшими НВ в ДНС-Х2, например, при виде сверху левый и правый меньшие НВ вращаются соответственно по часовой и против часовой стрелки так, что обеспечивают устранение гироскопического эффекта и гармоничное управление по рысканию совместно с большими НВ, причем система трансмиссии обеспечивает передачу мощности от двух, например, турбодизельных двигателей (ТДД), левый и правый из которых имеет задний вывод вала для отбора взлетной мощности и смонтирован в передней части соответствующей мотогондолы и связан посредством муфты сцепления с соответствующим Т-образным при виде сбоку промежуточным редуктором, снабженным двумя выходными потоками, первым нижними из них каждый ТДД передает крутящий момент посредством продольного вала с угловым редуктором и поперечным задним валом, проложенным в носке ЦЗК, на редуктор соответствующего меньшего винта ДНС-Х2, связанного с другим посредством синхронизирующего вала, а вторым из них потоком, передающим крутящий момент от каждого ТДД вертикальным выходным валом, который связан посредством муфты сцепления с соответствующим угловым редуктором, имеющим вертикальный вал, сцентрированный подшипниковым узлом внутри полого вала зубчатого сектора узла поворота каждой консоли КТЧ и связанные через второй угловой редуктор и посредством поперечного вала, проходящего в носке каждой внешней консоли КТЧ и ее профилированном пилоне, с консольным угловым редуктором соответствующего большего НВ в ПНВС-Х2, при этом левый и правый зубчатый сектор КТЧ, установленный на нижней поверхности его внешней консоли и изменяющий ее стреловидность посредством ее поворота вперед по полету в плоскости хорды КТЧ, смонтирован в соответствующем узле поворота на верхних бортах мотогондол так, что каждый из зубчатых секторов, имеющих необходимый центральный угол, находится в зацеплении и взаимодействует при этом с приводной шестерней соответствующего узла поворота консоли КТЧ, создающего перед взлетом при их повороте на угол от 0° до -6,5° требуемый угол стреловидности КТЧ от заданной центровки или от -6,5° до -90° - стояночную конфигурацию с предварительно зафиксированными лопастями-крыльями НВ, причем при выполнении ВВП и зависания каждым промежуточным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ПНВС-Х2 и ДНС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ равной ρN=3,4 кг/л.с., а на самолетных режимах полета только при остановленных и зафиксированных соответствующим образом лопастях-крыльях НВ над консолями КТЧ каждым промежуточным редуктором перераспределяется 46% от взлетной мощности СУ системой трансмиссии только на меньшие винты ДНС-Х2, но и обратно, при этом на палубе авианесущего корабля в транспортно-стояночной его конфигурации однолопастные НВ после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что лопасти-крылья направлены к узлам поворота консолей КТЧ, устанавливаемым внешние его левую и правую консоли после их поворота на угол 90° по часовой и против часовой стрелки при виде сверху соответственно совместно с лопастями-крыльями, размещенными при этом вдоль продольной оси соответствующих подкрыльных мотогондол так, что сами лопасти-крылья зафиксированы над сложенными консолями КТЧ и после их поворота вперед по полету размещены к передней кромке внутренних секций КТЧ, а их противовесы, направленные в противоположные стороны консолям КТЧ, разнесены при виде сверху по обе стороны от оси симметрии в носовой части фюзеляжа.
Кроме того, на вертолетных, но и самолетных режимах полета левый и правый однолопастные НВ соответственно с правым и левым упомянутыми меньшими задними НВ вращаются по часовой и против часовой стрелки, но и левый и правый однолопастные НВ зафиксированы так, что образуют при виде спереди внешнюю ступенчатую конфигурацию крыльями-лопастями с консолями КТЧ, направленными перпендикулярно от оси симметрии, вынесены наружу от законцовок КТЧ, имеющего с ЦЗК общее большое удлинение (λобщ), составляющее величину λобщ=14,83 единиц.
Кроме того, каждый левый и правый ТДД имеет передний вывод вала для отбора взлетной мощности и смонтирован в задней части соответствующей мотогондолы, имеющей в передней каждой ее продолговатой части с внутренних их бортов узлы поворотов цельно-поворотного переднего крыла (ЦПК), при этом на палубе авианесущего корабля в транспортно-стояночной его конфигурации большие НВ после их остановки зафиксированы так, что лопасти-крылья направлены к узлам поворота консолей КТЧ, устанавливаемым назад от направления полета внешние его левую и правую консоли после их поворота на угол 90° против часовой и по часовой стрелке при виде сверху соответственно совместно с лопастями-крыльями, размещены при этом вдоль продольной оси соответствующих надкрыльных мотогондол так, что сами лопасти-крылья зафиксированы над сложенными консолями КТЧ и после их поворота назад по полету размещены к задней кромке внутренних секций КТЧ, а их телескопические противовесы, втянутые во внутрь обтекателя их втулок, разнесенных при виде сверху по обе стороны от оси симметрии в кормовой части фюзеляжа, причем на вертолетных, но и самолетных режимах полета левый и правый большие НВ соответственно имеют направление вращения с правым и левым упомянутыми передними меньшими НВ против часовой и по часовой стрелке, но и левый и правый большие НВ зафиксированы с соответствующими консолями КТЧ в бипланной схеме, имеющей с ЦПК удлинение (λби), составляющее величину от 5,78 до 6,28 единиц в аэродинамической схеме продольного триплана со стабилизатором хвостового оперения, при этом нижняя часть фюзеляжа для повышения мореходности (до 4 баллов) и обеспечения плавучести выполнена в виде герметизированной лодки, имеющей днище килеватой формы, изготовленной из композиционных материалов и снабженной центральным основным топливным баком и грузовым отсеком для основных узлов и агрегатов колесного шасси, одна двухколесная опора из которых убирается в переднюю нишу лодки, а две основные двухколесные стойки - в задние ниши герметизированных обтекателей, причем упомянутое КТЧ снабжено выдвигаемыми вниз/вверх складываемыми стойками, смонтированными в нижних нишах мотогондол с подкрыльными поплавками, повышающими поперечную остойчивость на водной поверхности.
Кроме того, на вертолетных, но и самолетных режимах полета левый и правый упомянутые однолопастные НВ соответственно вращаются с правым и левым меньшими НВ по часовой и против часовой стрелки, но и левый и правый однолопастные НВ зафиксированы так, что крылья-лопасти с консолями КТЧ образуют при виде спереди внешнюю ступенчатую конфигурацию, направленную перпендикулярно от оси симметрии, вынесенную наружу от законцовок КТЧ, имеющего с упомянутым ЦПК общее большое удлинение (λобщ), составляющее величину от 14,83 до 16,13 единиц.
Кроме того, при выполнении ВВП для повышения безопасности на торцах законцовок, упомянутого КТЧ, имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами, при этом автономные системы управления, включающие автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута и систему экстренного автоматического возврата, которая включится в том случае, если оператор не будет реагировать на запросы бортового компьютера, а затем обеспечит мягкую автоматическую посадку в заданной точке или в месте вылета, но и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, при этом широкохордовые упомянутые однолопастные винты имеют среднюю аэродинамическую хорду лопасти (bcax) и радиус профилированного противовеса (rпп), определяемым соответственно из соотношений: bcax=0,11⋅Rнв, м и rпп=0,3⋅Rнв, м (где: Rнв - радиус несущих винтов), при этом каждый профилированный противовес, выполненный с обратным в плане сужением, имеет корневую и концевую хорды соответственно равновеликую и в 1,1 раза больше корневой хорды несущего винта, имеющего в свою очередь концевую хорду лопасти-крыла в 1,1 раза меньше его корневой хорды, снабжен законцовкой, имеющей внешнюю дугообразную и зеркально расположенную внутреннюю линии, образующие эллипсовидную в плане форму с большей ее осью, сопрягаемой с соответствующими кромками профилированного противовеса, образуя удобообтекаемую его форму, причем спереди на верхних частях фюзеляжа и обтекателя каждой мотогондолы имеются перед передней кромкой и верхней кромкой стекла кабины по три равновеликих аэродинамических гребня, параллельно смонтированных, улучшая их обтекание, так чтобы центральный размещался по продольной их оси ближе к передней кромке и лобовому стеклу, а левый и правый аэродинамические гребни в свою очередь установлены дальше от них и при этом равноудалены от центрального, при этом он снабжен под центром масс в нижней части фюзеляжа швартующим устройством с рычагом ручного управления, имеющим на отклоняемой вниз/вверх телескопической штанге запорный механизм и устройство захвата, контактирующее с ячейками палубной решетки, обеспечивая возможность посадки на корабль при кренах до 25°.
Благодаря наличию этих признаков, позволяющих освоить палубный вертолет-самолет-амфибию (ПВСА), выполненную с высокорасположенными разновеликими крыльями дупланной схемы, включающей переднее крыло типа чайка (КТЧ) большей площади и межгондольное меньшего размаха и площади цельно-поворотное заднее крыло (ЦЗК), но и по концепции поперечно-несущей винтовой системы (ПНВС), в которой левый и правый однолопастные большие несущие винты (НВ), установленные на законцовках внешних консолей КТЧ, закрепленных на верхних бортах подкрыльных мотогондол, смонтированных под развитыми изломами КТЧ, и обеспечивающие только ВВП или КВП с флюгерно-реверсивными тянущими меньшими винтами движительно-несущей системы (ДНС), смонтированными на ЦЗК, создавая требуемое большее продольное удаление ДНС-Х2 от центра масс, и работающими как совместно с большими НВ при выполнении ВВП и зависания, так и самостоятельно для создания маршевой тяги при скоростном горизонтальном полете и зафиксированных лопастях-крыльях больших НВ, размещенных на профилированных пилонах, вынесенных вперед от поперечной оси, проходящей через центр масс, создавая от него требуемое меньшее продольное удаление ПНВС-Х2, и снабжен возможностью преобразования полетной его конфигурации после выполнении технологии КВП или ВВП с винтокрыла или вертолета с ПНВС-Х2 и ДНС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДНС-Х2 соответственно с двумя большими НВ, работающими на режимах близких к их авторотации или при жестко закрепленных лопастях-крыльях больших НВ, зафиксированные лопасти которых остановлены и вынесены к оси симметрии от профилированных пилонов КТЧ над их консолями, увеличивая площадь КТЧ, а также несущую его способность совместно с ЦЗК не только за счет отклонения его средств механизации взлетно-посадочной конфигурации, но и образуя крыльями-лопастями бипланную аэродинамическую схему с консолями КТЧ, имеющего с ЦЗК удлинение (λби), составляющее величину λби=5,78 единиц и размах крыла (Lктч), определяемый из соотношения: Lктч=1,661⋅2Rнв, м (где: Rнв - радиус однолопастных НВ) и снабженным внутренними закрылками и внешними флапперонами, корневые хорды первых из них в  раза больше концевых хорд последних, так и обратно, при этом средняя аэродинамическая хорда (САХ) КТЧ, определяемая из соотношения:
раза больше концевых хорд последних, так и обратно, при этом средняя аэродинамическая хорда (САХ) КТЧ, определяемая из соотношения:  (где: bнв - САХ лопасти НВ), предопределяет при виде сверху совмещение каждой передней кромки больших НВ с передней кромкой КТЧ, но и их разнесение по вертикали так, что средние линии лопастей больших НВ, работающих по тянущей схеме, равноудалены от оси симметрии и размещены выше от и параллельно средней линии КТЧ на величину вертикального зазора (zнв), определяемого из соотношения: zнв=0,3⋅bктч, м (где: bктч - САХ консолей КТЧ), при этом большие НВ выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между большими НВ, например, при виде сверху левый и правый большие НВ вращаются соответственно против и по часовой стрелке так, что обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечно-продольного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком консолей КТЧ, причем трапециевидные в плане КТЧ, ЦЗК и лопасти-крылья НВ имеют разновеликие площади, которые составляют соответственно 52%, 25% и 23% от общей площади бипланной схемы крыльев, преобразующей с межгондольным ЦЗК аэродинамическую дупланную схему в продольный триплан со стабилизатором хвостового оперения, при этом трехлопастные меньшие НВ в ДНС-Х2 имеют как жесткое крепление лопастей и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими большими НВ в случае отказа двигателей СУ, так и при выполнении ВВП и зависания обеспечивают полную компенсацию реактивных крутящих их моментов при противоположном направлении вращения между меньшими НВ в ДНС-Х2, например, при виде сверху левый и правый меньшие НВ вращаются соответственно по часовой и против часовой стрелки так, что обеспечивают устранение гироскопического эффекта и гармоничное управление по рысканию совместно с большими НВ, причем система трансмиссии обеспечивает передачу мощности от двух, например, турбодизельных двигателей (ТДД), левый и правый из которых имеет задний вывод вала для отбора взлетной мощности и смонтирован в передней части соответствующей мотогондолы и связан посредством муфты сцепления с соответствующим Т-образным при виде сбоку промежуточным редуктором, снабженным двумя выходными потоками, первым нижними из них каждый ТДД передает крутящий момент посредством продольного вала с угловым редуктором и поперечным задним валом, проложенным в носке ЦЗК, на редуктор соответствующего меньшего винта ДНС-Х2, связанного с другим посредством синхронизирующего вала, а вторым из них потоком, передающим крутящий момент от каждого ТДД вертикальным выходным валом, который связан посредством муфты сцепления с соответствующим угловым редуктором, имеющим вертикальный вал, сцентрированный подшипниковым узлом внутри полого вала зубчатого сектора узла поворота каждой консоли КТЧ и связанные через второй угловой редуктор и посредством поперечного вала, проходящего в носке каждой внешней консоли КТЧ и ее профилированном пилоне, с консольным угловым редуктором соответствующего большего НВ в ПНВС-Х2, при этом левый и правый зубчатый сектор КТЧ, установленный на нижней поверхности его внешней консоли и изменяющий ее стреловидность посредством ее поворота вперед по полету в плоскости хорды КТЧ, смонтирован в соответствующем узле поворота на верхних бортах мотогондол так, что каждый из зубчатых секторов, имеющих необходимый центральный угол, находится в зацеплении и взаимодействует при этом с приводной шестерней соответствующего узла поворота консоли КТЧ, создающего перед взлетом при их повороте на угол от 0° до -6,5° требуемый угол стреловидности КТЧ от заданной центровки или от -6,5° до -90° - стояночную конфигурацию с предварительно зафиксированными лопастями-крыльями НВ, причем при выполнении ВВП и зависания каждым промежуточным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ПНВС-Х2 и ДНС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ равной ρN=3,4 кг/л.с., а на самолетных режимах полета только при остановленных и зафиксированных соответствующим образом лопастях-крыльях НВ над консолями КТЧ каждым промежуточным редуктором перераспределяется 46% от взлетной мощности СУ системой трансмиссии только на меньшие винты ДНС-Х2, но и обратно, при этом на палубе авианесущего корабля в транспортно-стояночной его конфигурации однолопастные НВ после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что лопасти-крылья направлены к узлам поворота консолей КТЧ, устанавливаемым внешние его левую и правую консоли после их поворота на угол 90° по часовой и против часовой стрелки при виде сверху соответственно совместно с лопастями-крыльями, размещенными при этом вдоль продольной оси соответствующих подкрыльных мотогондол так, что сами лопасти-крылья зафиксированы над сложенными консолями КТЧ и после их поворота вперед по полету размещены к передней кромке внутренних секций КТЧ, а их противовесы, направленные в противоположные стороны консолям КТЧ, разнесены при виде сверху по обе стороны от оси симметрии в носовой части фюзеляжа. Все это позволит при переходных маневрах ПВСА повысить продольно-поперечную управляемость, а размещение СУ вблизи центра масс обеспечит упрощение системы трансмиссии и позволит использовать ТДД меньших габаритов в их поперечнике, что уменьшит мидель каждой мотогондолы и ее аэродинамическое сопротивление. Применение однолопастных НВ позволит достичь более высокую аэродинамическую эффективность, несмотря на вредное сопротивление профилированных балансировочных противовесов. Для предотвращения нежелательных вибраций однолопастные НВ работают с большой окружной скоростью. Поэтому основной режим работы таких НВ - это ВВП и зависание. В случае появления косого обдува тяга НВ изменяется циклически. Поэтому жесткое крепление лопасти улучшает управляемость, особенно однолопастных НВ. В синхронизированной ПНВС-Х2 моменты Мкрен и Мпрод от левого и правого однолопастных НВ при передаче на фюзеляж через КТЧ взаимно уничтожаются. Поэтому коэффициент аэродинамической выгодности однолопастных НВ в ПНВС-Х2 будет выше, имея их радиус в 2,07 и 2,34 раза меньше, чем у соосного (Ка-27) и классического (Ка-62) вертолета с многолопастными НВ. Что позволит уменьшить вес планера, повысить весовую отдачу и улучшить в три раза топливную эффективность за счет того, что при выполнении ВВП и зависания работают два ТДД, а при выполнении скоростного полета - один ТДД и, особенно, в сравнении с палубными двухдвигательными вертолетами Ка-27 и Ка-62, расходующими соответственно 380 кг/ч и 734 кг/ч топлива. Более того, все это позволит также в сравнении с традиционным самолетом монопланной схемы повысить маневренность на малых скоростях полета и при переходных маневрах, но и снизить скорость сваливания за сет увеличения в 1,23 раза коэффициент поднятия бипланно-дупланной схемы крыльев, создающей совместно с лопастями-крыльями НВ преимущество в производстве подъемной силы при выполнении КВП на взлетно-посадочных и, особенно, на скоростных режимах горизонтального полета дизельных ПВСА, но и опционально-управляемых беспилотных палубных вертолетов-самолетов (БПВС), используемых на удалении до 463 км от авианесущего корабля совместно с ПВСА.
(где: bнв - САХ лопасти НВ), предопределяет при виде сверху совмещение каждой передней кромки больших НВ с передней кромкой КТЧ, но и их разнесение по вертикали так, что средние линии лопастей больших НВ, работающих по тянущей схеме, равноудалены от оси симметрии и размещены выше от и параллельно средней линии КТЧ на величину вертикального зазора (zнв), определяемого из соотношения: zнв=0,3⋅bктч, м (где: bктч - САХ консолей КТЧ), при этом большие НВ выполнены без управления циклического изменения их шага и с жестким креплением их лопастей и профилированных противовесов, но и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между большими НВ, например, при виде сверху левый и правый большие НВ вращаются соответственно против и по часовой стрелке так, что обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечно-продольного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком консолей КТЧ, причем трапециевидные в плане КТЧ, ЦЗК и лопасти-крылья НВ имеют разновеликие площади, которые составляют соответственно 52%, 25% и 23% от общей площади бипланной схемы крыльев, преобразующей с межгондольным ЦЗК аэродинамическую дупланную схему в продольный триплан со стабилизатором хвостового оперения, при этом трехлопастные меньшие НВ в ДНС-Х2 имеют как жесткое крепление лопастей и возможность изменения общего их шага и установки их лопастей во флюгерное положение после их остановки и фиксации для осуществления аварийного режима посадки с авторотирующими большими НВ в случае отказа двигателей СУ, так и при выполнении ВВП и зависания обеспечивают полную компенсацию реактивных крутящих их моментов при противоположном направлении вращения между меньшими НВ в ДНС-Х2, например, при виде сверху левый и правый меньшие НВ вращаются соответственно по часовой и против часовой стрелки так, что обеспечивают устранение гироскопического эффекта и гармоничное управление по рысканию совместно с большими НВ, причем система трансмиссии обеспечивает передачу мощности от двух, например, турбодизельных двигателей (ТДД), левый и правый из которых имеет задний вывод вала для отбора взлетной мощности и смонтирован в передней части соответствующей мотогондолы и связан посредством муфты сцепления с соответствующим Т-образным при виде сбоку промежуточным редуктором, снабженным двумя выходными потоками, первым нижними из них каждый ТДД передает крутящий момент посредством продольного вала с угловым редуктором и поперечным задним валом, проложенным в носке ЦЗК, на редуктор соответствующего меньшего винта ДНС-Х2, связанного с другим посредством синхронизирующего вала, а вторым из них потоком, передающим крутящий момент от каждого ТДД вертикальным выходным валом, который связан посредством муфты сцепления с соответствующим угловым редуктором, имеющим вертикальный вал, сцентрированный подшипниковым узлом внутри полого вала зубчатого сектора узла поворота каждой консоли КТЧ и связанные через второй угловой редуктор и посредством поперечного вала, проходящего в носке каждой внешней консоли КТЧ и ее профилированном пилоне, с консольным угловым редуктором соответствующего большего НВ в ПНВС-Х2, при этом левый и правый зубчатый сектор КТЧ, установленный на нижней поверхности его внешней консоли и изменяющий ее стреловидность посредством ее поворота вперед по полету в плоскости хорды КТЧ, смонтирован в соответствующем узле поворота на верхних бортах мотогондол так, что каждый из зубчатых секторов, имеющих необходимый центральный угол, находится в зацеплении и взаимодействует при этом с приводной шестерней соответствующего узла поворота консоли КТЧ, создающего перед взлетом при их повороте на угол от 0° до -6,5° требуемый угол стреловидности КТЧ от заданной центровки или от -6,5° до -90° - стояночную конфигурацию с предварительно зафиксированными лопастями-крыльями НВ, причем при выполнении ВВП и зависания каждым промежуточным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ПНВС-Х2 и ДНС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ равной ρN=3,4 кг/л.с., а на самолетных режимах полета только при остановленных и зафиксированных соответствующим образом лопастях-крыльях НВ над консолями КТЧ каждым промежуточным редуктором перераспределяется 46% от взлетной мощности СУ системой трансмиссии только на меньшие винты ДНС-Х2, но и обратно, при этом на палубе авианесущего корабля в транспортно-стояночной его конфигурации однолопастные НВ после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что лопасти-крылья направлены к узлам поворота консолей КТЧ, устанавливаемым внешние его левую и правую консоли после их поворота на угол 90° по часовой и против часовой стрелки при виде сверху соответственно совместно с лопастями-крыльями, размещенными при этом вдоль продольной оси соответствующих подкрыльных мотогондол так, что сами лопасти-крылья зафиксированы над сложенными консолями КТЧ и после их поворота вперед по полету размещены к передней кромке внутренних секций КТЧ, а их противовесы, направленные в противоположные стороны консолям КТЧ, разнесены при виде сверху по обе стороны от оси симметрии в носовой части фюзеляжа. Все это позволит при переходных маневрах ПВСА повысить продольно-поперечную управляемость, а размещение СУ вблизи центра масс обеспечит упрощение системы трансмиссии и позволит использовать ТДД меньших габаритов в их поперечнике, что уменьшит мидель каждой мотогондолы и ее аэродинамическое сопротивление. Применение однолопастных НВ позволит достичь более высокую аэродинамическую эффективность, несмотря на вредное сопротивление профилированных балансировочных противовесов. Для предотвращения нежелательных вибраций однолопастные НВ работают с большой окружной скоростью. Поэтому основной режим работы таких НВ - это ВВП и зависание. В случае появления косого обдува тяга НВ изменяется циклически. Поэтому жесткое крепление лопасти улучшает управляемость, особенно однолопастных НВ. В синхронизированной ПНВС-Х2 моменты Мкрен и Мпрод от левого и правого однолопастных НВ при передаче на фюзеляж через КТЧ взаимно уничтожаются. Поэтому коэффициент аэродинамической выгодности однолопастных НВ в ПНВС-Х2 будет выше, имея их радиус в 2,07 и 2,34 раза меньше, чем у соосного (Ка-27) и классического (Ка-62) вертолета с многолопастными НВ. Что позволит уменьшить вес планера, повысить весовую отдачу и улучшить в три раза топливную эффективность за счет того, что при выполнении ВВП и зависания работают два ТДД, а при выполнении скоростного полета - один ТДД и, особенно, в сравнении с палубными двухдвигательными вертолетами Ка-27 и Ка-62, расходующими соответственно 380 кг/ч и 734 кг/ч топлива. Более того, все это позволит также в сравнении с традиционным самолетом монопланной схемы повысить маневренность на малых скоростях полета и при переходных маневрах, но и снизить скорость сваливания за сет увеличения в 1,23 раза коэффициент поднятия бипланно-дупланной схемы крыльев, создающей совместно с лопастями-крыльями НВ преимущество в производстве подъемной силы при выполнении КВП на взлетно-посадочных и, особенно, на скоростных режимах горизонтального полета дизельных ПВСА, но и опционально-управляемых беспилотных палубных вертолетов-самолетов (БПВС), используемых на удалении до 463 км от авианесущего корабля совместно с ПВСА.
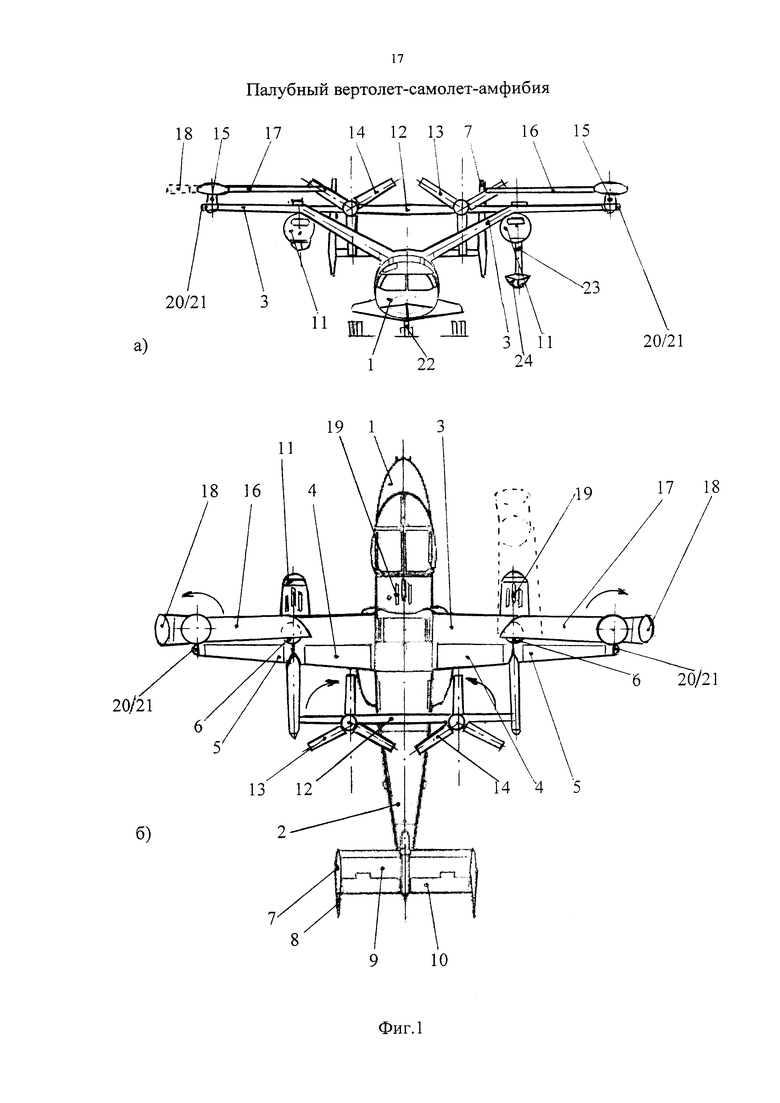
Предлагаемое изобретение преобразуемого ПВСА с двухкилевым оперением, выполненного по концепции ПНВС-Х2 с ДНС-Х2 и крыльями-лопастями однолопастных НВ, зафиксированных вдоль консолей КТЧ от его законцовок к оси симметрии, образуя бипланно-дупланную схему умеренного удлинения (λби) 5,78 единиц представлено на общих видах спереди и сверху соответственно a) и б) на фиг. 1:
а) в полетной конфигурации самолета с маршевой тягой от меньших НВ на ЦЗК с зафиксированными лопастями-крыльями НВ, имеющими втянутые телескопические их противовесы и размещенными к оси симметрии от законцовок КТЧ, имеющих надкрыльные пилоны НВ и выдвигаемые стойки подкрыльных поплавков;
б) в полетной конфигурации вертолета с двумя меньшими НВ в ДНС-Х2 и двумя однолопастными большими НВ в ПНВС-Х2, смонтированными соответственно на межгондольном ЦЗК и на законцовках внешних складываемых консолей КТЧ.
Преобразуемый ПВСА, выполненный по дупланной схеме с разновеликими крыльями, представлен на фиг. 1 и содержит фюзеляж-лодку 1, имеющей днище килеватой формы и хвостовую балку 2. Высокорасположенное КТЧ 3 с закрылками 4 и флапперонами 5 имеет внешние консоли, которые снабжены узлами их поворота 6. Разнесенное двухкилевое оперение смонтировано на конце хвостовой балки 2, имеет кили 7, выполненные с рулями направления 8, содержит стабилизатор 9 с рулями высоты 10. В задних продолговатых окончаниях мотогондол 11, смонтированных под изломами КТЧ 3 и имеющих с внутренних их бортов узлы поворота ЦЗК 12 с трехлопастными левым 13 и правым 14 тянущими меньшими НВ. На законцовках КТЧ 3 смонтированы их надкрыльные пилоны 15, имеющие левый 16 и правый 17 тянущие большие НВ, снабженные их противовесами 18. На каждой мотогондоле 11 имеется как наравне с фюзеляжем 1 спереди на верхних передних их частях по три равновеликих аэродинамических гребня 19, улучшающих их обтекание. Во время аварийной посадки при выполнении ВВП и отказе двигателей СУ его широкохордовые 16-17 НВ работают на режиме авторотации и разгружают КТЧ 3, а во время горизонтального полета и отказе его двух ТДД - лопасти меньших 13-14 НВ флюгируются для предотвращения авторотации с одновременным автоматическим отклонением закрылок 4 и флапперонов 5 на КТЧ 3. Однолопастные НВ 16-17 выполнены без автоматов перекоса и с жестким креплением их лопастей и профилированных телескопических противовесов 18, но и возможностью создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между НВ, например, при виде сверху левый больший 16 НВ с правым меньшим 14 НВ и правый больший 17 с левым меньшим 13 НВ вращаются против часовой и по часовой стрелке соответственно (см. фиг. 1б). Двухдвигательная СУ имеет в передних окончаниях мотогондол 11 левый и правый ТДД с задним выводом вала для отбора их взлетной их мощности. Каждый из ТДД связан посредством муфты сцепления с Т-образным при виде сбоку промежуточным редуктором, снабженным двумя выходными потоками, первым нижними из них каждый ТДД передает крутящий момент посредством продольного вала с угловым редуктором и поперечным задним валом, проложенным в носке ЦЗК 12, на редуктор соответствующего меньшего 13-14 НВ, связанного с другим посредством синхронизирующего вала, а вторым из них потоком, передающим крутящий момент от каждого ТДД вертикальным выходным валом, который связан посредством муфты сцепления с соответствующим угловым редуктором, имеющим вертикальный вал, сцентрированный подшипниковым узлом внутри полого вала зубчатого сектора узла поворота каждой консоли КТЧ 3 и связанные через второй угловой редуктор и посредством поперечного вала, проходящего в носке каждой консоли КТЧ 3 и ее профилированном пилоне 15, с консольным угловым редуктором соответствующего однолопастного 16-17 НВ. На торцах законцовок КТЧ 3 имеются сигнальные огни 20 и датчики сближения 21 при выполнении как ВВП, так и при их складывании посредством узла поворота 6 с консолями КТЧ 3 на стоянке ПВСА, закрепленном швартующим устройством 22. Правая из складываемых стоек 23 подкрыльных поплавков 24 показана втянутой в мотогондлу 11. (см. фиг. 1a). Планер, кабина и грузопассажирский отсек плавающего ПВСА выполнены из композитных материалов и углеродного волокна, каркас и несущие элементы фюзеляжа - из сплавов на основе алюминия.
Управление преобразуемым ПВСА обеспечивается общим и дифференциальным изменением шага поворотных 13-14 и однолопастных 16-17 НВ, отклонением рулей направления 8 и высоты 10 на двухкилевом оперении и флапперонов 5 на КТЧ 3. При крейсерском полете подъемная сила создается КТЧ 3, ЦЗК 12 и зафиксированными лопастями-крыльями однолопастных НВ 16-17, остановленными над пилонами 15 на законцовках КТЧ 3 (см. фиг. 1а), горизонтальная тяга - поворотными 13-14 НВ, на режиме висения только поворотными 13-14 и однолопастными 16-17 НВ, на режиме перехода - КТЧ 3, ЦЗК 12 с поворотными 13-14 и однолопастными 16-17 НВ. После стоянки для вертикального взлета консоли КТЧ 3 совместно с НВ 16-17, остановленными над пилонами 15 на законцовках КТЧ 3 отворачиваются наружу от оси симметрии при виде сверху, а ЦЗК 12 с 13-14 НВ устанавливаются в вертолетную полетную конфигурацию (см. фиг. 1б). После создания подъемной тяги поворотными 13-14 и однолопастными 16-17 НВ обеспечиваются вертолетные режимы полета. Рули высоты 10 отклоняются от горизонтального положения вверх и вниз на углы ±15° при взлетных и посадочных режимах полета и при выполнении технологии КВП на самолетных режимах полета ПВСА. При висении на вертолетных режимах полета путевое управление ПВСА осуществляется дифференциальным изменением шага диагонально расположенных НВ, имеющих одинаковое направление вращение, например, левый однолопастной 16 НВ с правым 14 поворотным НВ. При выполнении ВВП и зависания продольное и поперечное управление ПВСА осуществляется изменением тяги НВ соответственно в продольных их группах с передними однолопастными 16-17 НВ и задними поворотными 13-14 НВ и в поперечных группах двумя левыми 13-16 и двумя правыми 14-17 НВ. После вертикального взлета и набора высоты производится разгон в винтокрылой конфигурации. Затем для перехода на самолетный горизонтальный режим полета лопасти-крылья 16-17 однолопастных НВ синхронно останавливаются и фиксируются во внутрь к плоскости симметрии вдоль соответствующих внешних консолей КТЧ 3 (см. фиг. 1а) и производится скоростной горизонтальной полет в самолетной полетной конфигурации, при котором путевое управление обеспечивается рулями направления 8. Продольное и поперечное управление при этом осуществляется синфазным и дифференциальным отклонением рулей высоты 10 на двухкилевом оперении и флапперонов 5 на внешних консолях КТЧ 3 соответственно.
Таким образом, ПВСА с ДНС-Х2 и ПНВС-Х2 имеет меньшие НВ на ЦЗК и однолопастные НВ на законцовках консолей КТЧ представляет собой гибридный вертолет-самолет, который изменяет свой полетную конфигурацию благодаря повороту меньших НВ и фиксации симметричных поверхностей лопастей-крыльев однолопастных НВ относительно продольной оси ПВСА, но и имеет возможность на палубе авианесущего корабля (АК) автоматического складывания внешних консолей КТЧ с зафиксированными на них однолопастными НВ и втянутыми телескопическими противовесами. После чего ПВСА, изменяя свою стояночную конфигурацию, превратится в самолет со сложенным КТЧ для транспортирования в ангар АК. Флюгерно-реверсивные меньшие НВ, создающий маршевую тягу, обеспечивают и вертикальную тягу при ВВП и зависании, но и уменьшают дистанцию при посадке с пробегом на самолетных режимах полета. Аэродинамическая бипланно-дупланная схема КТЧ с ЦЗК создает за сет увеличения в 1,23 раза коэффициента ее поднятия и, особенно, совместно с лопастями-крыльями НВ в производстве подъемной силы, позволит наравне с высокой тяговооруженностью СУ реализовать возможность выполнения технологии короткого взлета в перегрузочном варианте, например, БПВС-1,0 с дополнительными 440 кг целевой нагрузки, а затем вертикальной посадки его пустого на палубу АК.
Однако, нет никаких сомнений в том, что на пути освоения преобразуемых ПВСА, используя вышеназванные преимущества, предстоит преодолеть еще немало трудностей и проблем. Это в первую очередь относится к решению проблем аэродинамической интерференции однолопастных больших НВ с поворотными меньшими НВ и возможности обеспечения устойчивости и управляемости на режимах ВВП при совместной работе в синхронно-сбалансированной и симметричной ПНВС-Х2 однолопастных НВ, которые весьма перспективны в качестве останавливаемых и не убираемых в полете винтов-крыльев, что исключит наличие узлов переворота лопастей (для организации симметричных поверхностей крыла относительно продольной оси) или весьма конструктивно сложных систем их складывания и уборки НВ.
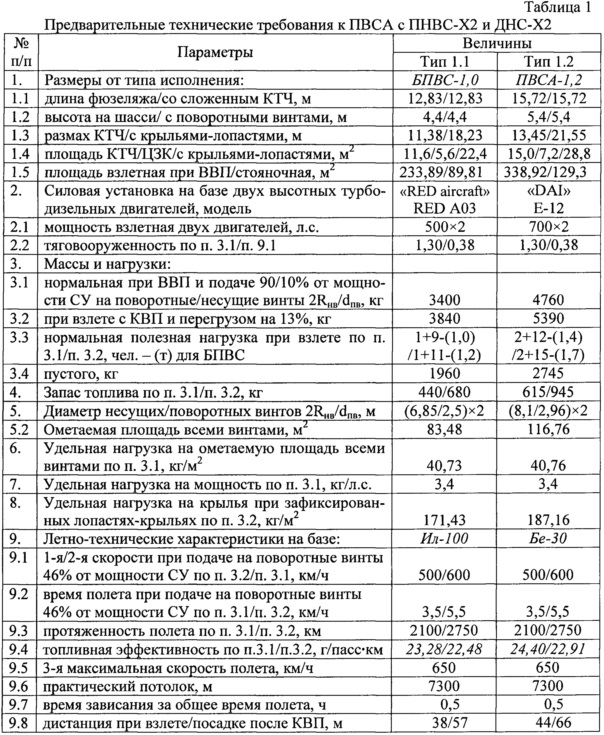
Поскольку для использования концепции ПНВС-Х2 требуются минимальные изменения существующих конструкций самолетов монопланной схемы, то доведение, сокращая сроки их освоения, соответственно до разведывательно-ударных и противолодочных и противокорабельных БПВС или поисково-спасательных и транспортно-десантных ПВСА (см. табл. 1) - задача достаточно просто технически реализуемая и предпочтительная, особенно, для нужд специальной, палубной и армейской авиации.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЦЕЛЕВОЙ ПАЛУБНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652861C1 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| СКОРОСТНОЙ ГИБРИДНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2652863C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2664024C2 |
| БЕСПИЛОТНЫЙ ПАЛУБНЫЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2017 |
|
RU2661277C1 |
| БЕСПИЛОТНЫЙ ВЫСОКОСКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2653953C1 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОСКОРОСТНОЙ САМОЛЕТ-ВЕРТОЛЕТ | 2017 |
|
RU2673317C1 |
| ПРОТИВОЛОДОЧНЫЙ РАКЕТНЫЙ КОМПЛЕКС С АВТОНОМНЫМ РЕАКТИВНЫМ САМОЛЕТОМ-НОСИТЕЛЕМ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2699616C2 |
Изобретение относится к области авиации и может быть использовано в конструкции палубных летательных аппаратов. Палубный вертолет-самолет-амфибия (ПВСА) содержит на консолях крыла две мотогондолы, хвостовое оперение, двигатели силовой установки, поворотные винты, создающие горизонтальную и их соответствующим отклонением вертикальную тягу, трехопорное колесное шасси. ПВСА выполнен с высокорасположенными разновеликими крыльями дупланной схемы, включающей переднее крыло типа чайка (КТЧ) большей площади и межгондольное меньшего размаха и площади цельно-поворотное заднее крыло (ЦЗК). ПВСА имеет поперечную несущую винтовую систему, в которой левый и правый однолопастные большие несущие винты (НВ) установлены на законцовках внешних консолей КТЧ, закрепленных на верхних бортах подкрыльных мотогондол. Флюгерно-реверсивные тянущие винты движительно-несущей системы смонтированы на ЦЗК. ПВСА снабжен возможностью преобразования полетной конфигурации после выполнения КВП или ВВП с винтокрыла или вертолета в соответствующий скоростной винтокрыл или самолет с двумя большими НВ, работающими на режимах, близких к авторотации, или при жестко закрепленных лопастях-крыльях. Обеспечивается повышение аэродинамического качества, маневренности при переходных маневрах и на малых скоростях полета. 3 з.п. ф-лы, 1 ил.. 1 табл.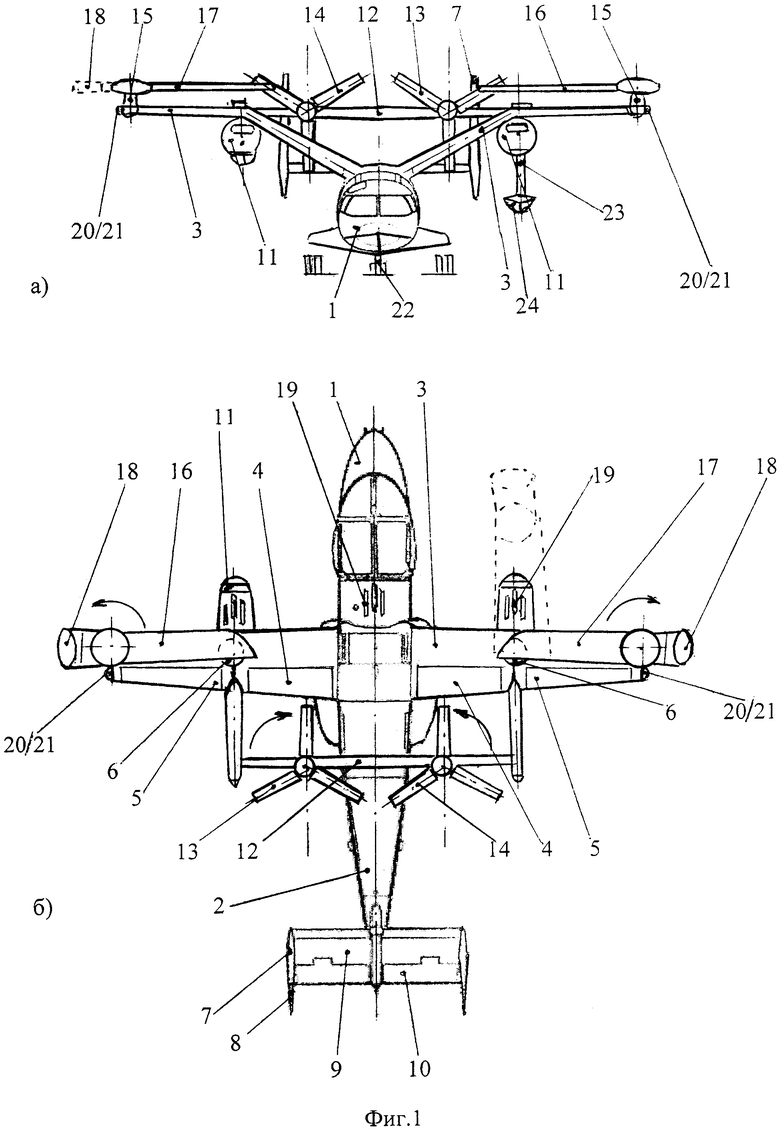
1. Палубный вертолет-самолет-амфибия, содержащий на консолях крыла две гондолы с поворотными винтами, имеет хвостовое оперение, двигатели силовой установки (СУ), передающие валами трансмиссии мощность на поворотные винты, создающие горизонтальную и их соответствующим отклонением вертикальную тягу, и трехопорное колесное шасси с носовой вспомогательной опорой, отличающийся тем, что он выполнен с высокорасположенными разновеликими крыльями дупланной схемы, включающей крыло типа чайка (КТЧ) большей площади и межгондольное меньшего размаха и площади цельно-поворотное заднее или переднее крыло (ЦЗК или ЦПК), и по концепции поперечно-несущей винтовой системы (ПНВС), в которой левый и правый однолопастные большие несущие винты (НВ) установлены на законцовках внешних консолей КТЧ, закрепленных на верхних бортах подкрыльных мотогондол, смонтированных под развитыми изломами КТЧ, и обеспечивают только вертикальный или короткий взлет/посадку (ВВП или КВП) с флюгерно-реверсивными тянущими меньшими винтами движительно-несущей системы (ДНС), смонтированными на ЦЗК, создавая требуемое большее продольное удаление ДНС-Х2 от центра масс, и работающими как совместно с большими НВ при выполнении ВВП и зависания, так и самостоятельно для создания маршевой тяги при скоростном горизонтальном полете и зафиксированных лопастях-крыльях больших НВ, размещенных на профилированных пилонах, вынесенных вперед от поперечной оси, проходящей через центр масс, создавая от него требуемое меньшее продольное удаление ПНВС-Х2, и снабжен возможностью преобразования полетной его конфигурации после выполнения технологии КВП или ВВП из винтокрыла или вертолета с ПНВС-Х2 и ДНС-Х2 в соответствующий скоростной винтокрыл или самолет с маршевой ДНС-Х2 соответственно с двумя большими НВ, работающими на режимах, близких к их авторотации, или при жестко закрепленных лопастях-крыльях больших НВ, зафиксированные лопасти которых увеличивают площадь и несущую способность КТЧ совместно с ЦЗК не только за счет отклонения его средств механизации взлетно-посадочной конфигурации, но и выноса лопастей-крыльев НВ на профилированных пилонах от соответствующих законцовок КТЧ, имеющего размах (Lктч), определяемый из соотношения Lктч=1,661⋅2Rнв, м (где Rнв - радиус однолопастных НВ), и снабженного внутренними закрылками и внешними флапперонами, корневые хорды первых из них в  раза больше концевых хорд последних, и обратно, при этом средняя аэродинамическая хорда (САХ) КТЧ, определяемая из соотношения
раза больше концевых хорд последних, и обратно, при этом средняя аэродинамическая хорда (САХ) КТЧ, определяемая из соотношения  , м (где bнв - САХ лопасти НВ), предопределяет при виде сверху совмещение каждой передней кромки больших НВ с передней кромкой КТЧ и их разнесение по вертикали так, что средние линии лопастей больших НВ, работающих по тянущей схеме, равноудалены от оси симметрии и размещены выше от и параллельно средней линии КТЧ на величину вертикального зазора (zнв), определяемого из соотношения zнв=0,3⋅bктч, м (где bктч - САХ консолей КТЧ), при этом большие НВ выполнены без управления циклического изменения шага и с жестким креплением лопастей и профилированных противовесов и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между большими НВ так, что обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечно-продольного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком консолей КТЧ, причем трапециевидные в плане КТЧ, ЦЗК и лопасти-крылья НВ имеют разновеликие площади, которые составляют соответственно 52%, 25% и 23% от общей площади бипланной схемы крыльев, преобразующей с межгондольным ЦЗК смешанную аэродинамическую дупланную схему в продольный триплан со стабилизатором хвостового оперения, при этом трехлопастные меньшие НВ в ДНС-Х2 имеют как жесткое крепление лопастей и возможность изменения общего шага и установки лопастей во флюгерное положение после остановки и фиксации для осуществления аварийного режима посадки с авторотирующими большими НВ в случае отказа двигателей СУ, так и при выполнении ВВП и зависания обеспечивают полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между меньшими НВ в ДНС-Х2 так, что обеспечивают устранение гироскопического эффекта и гармоничное управление по рысканию совместно с большими НВ, причем система трансмиссии обеспечивает передачу мощности от двух, например, турбодизельных двигателей (ТДД), левый и правый из которых имеет задний или передний вывод вала для отбора взлетной мощности и смонтирован в передней или задней части соответствующей мотогондолы, имеющей в задней или передней каждой ее продолговатой части с внутренних бортов соответственно узлы поворотов ЦЗК или ЦПК, и связан посредством муфты сцепления с соответствующим Т-образным при виде сбоку промежуточным редуктором, снабженным двумя выходными потоками, первым нижними из них каждый ТДД передает крутящий момент посредством продольного вала с угловым редуктором и поперечным задним валом, проложенным в носке ЦЗК, на редуктор соответствующего меньшего винта ДНС-Х2, связанного с другим посредством синхронизирующего вала, а вторым из них потоком, передающим крутящий момент от каждого ТДД вертикальным выходным валом, который связан посредством муфты сцепления с соответствующим угловым редуктором, имеющим вертикальный вал, сцентрированный подшипниковым узлом внутри полого вала зубчатого сектора узла поворота каждой консоли КТЧ и связанный через второй угловой редуктор и посредством поперечного вала, проходящего в носке каждой внешней консоли КТЧ и ее профилированном пилоне, с консольным угловым редуктором соответствующего большего НВ в ПНВС-Х2, при этом левый и правый зубчатый сектор КТЧ, установленный на нижней поверхности его внешней консоли и изменяющий ее стреловидность посредством ее поворота вперед по полету в плоскости хорды КТЧ, смонтирован в соответствующем узле поворота на верхних бортах мотогондол так, что каждый из зубчатых секторов, имеющих необходимый центральный угол, находится в зацеплении и взаимодействует при этом с приводной шестерней соответствующего узла поворота консоли КТЧ, создающего перед взлетом при их повороте на угол от 0° до -6,5° требуемый угол стреловидности КТЧ от заданной центровки или от -6,5° до -90° - стояночную конфигурацию с предварительно зафиксированными лопастями-крыльями НВ, причем при выполнении ВВП и зависания каждым промежуточным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ПНВС-Х2 и ДНС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ равной ρN=3,4 кг/л.с., а на самолетных режимах полета только при остановленных и зафиксированных соответствующим образом лопастях-крыльях НВ над консолями КТЧ каждым промежуточным редуктором перераспределяется 46% от взлетной мощности СУ системой трансмиссии только на меньшие винты ДНС-Х2, и обратно, при этом на палубе авианесущего корабля в транспортно-стояночной его конфигурации однолопастные НВ после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что лопасти-крылья направлены к узлам поворота консолей КТЧ, устанавливаемым внешние его левую и правую консоли после их поворота на угол 90° по часовой и против часовой стрелки или против часовой и по часовой стрелке при виде сверху соответственно совместно с лопастями-крыльями, размещенными при этом вдоль продольной оси соответствующих подкрыльных или надкрыльных мотогондол так, что сами лопасти-крылья зафиксированы над сложенными консолями КТЧ и после их поворота вперед или назад по полету размещены к передней или задней кромке внутренних секций КТЧ, а их противовесы или телескопические противовесы, направленные в противоположные стороны консолям КТЧ или втянутые вовнутрь обтекателя их втулок, разнесены при виде сверху по обе стороны от оси симметрии в носовой или кормовой части фюзеляжа.
, м (где bнв - САХ лопасти НВ), предопределяет при виде сверху совмещение каждой передней кромки больших НВ с передней кромкой КТЧ и их разнесение по вертикали так, что средние линии лопастей больших НВ, работающих по тянущей схеме, равноудалены от оси симметрии и размещены выше от и параллельно средней линии КТЧ на величину вертикального зазора (zнв), определяемого из соотношения zнв=0,3⋅bктч, м (где bктч - САХ консолей КТЧ), при этом большие НВ выполнены без управления циклического изменения шага и с жестким креплением лопастей и профилированных противовесов и создания от НВ полной компенсации реактивных крутящих моментов при противоположном направлении вращения между большими НВ так, что обеспечивают устранение гироскопического эффекта, гармоничное сочетание поперечно-продольного управления при выполнении ВВП и зависания и создание более плавного обтекания воздушным потоком консолей КТЧ, причем трапециевидные в плане КТЧ, ЦЗК и лопасти-крылья НВ имеют разновеликие площади, которые составляют соответственно 52%, 25% и 23% от общей площади бипланной схемы крыльев, преобразующей с межгондольным ЦЗК смешанную аэродинамическую дупланную схему в продольный триплан со стабилизатором хвостового оперения, при этом трехлопастные меньшие НВ в ДНС-Х2 имеют как жесткое крепление лопастей и возможность изменения общего шага и установки лопастей во флюгерное положение после остановки и фиксации для осуществления аварийного режима посадки с авторотирующими большими НВ в случае отказа двигателей СУ, так и при выполнении ВВП и зависания обеспечивают полную компенсацию реактивных крутящих моментов при противоположном направлении вращения между меньшими НВ в ДНС-Х2 так, что обеспечивают устранение гироскопического эффекта и гармоничное управление по рысканию совместно с большими НВ, причем система трансмиссии обеспечивает передачу мощности от двух, например, турбодизельных двигателей (ТДД), левый и правый из которых имеет задний или передний вывод вала для отбора взлетной мощности и смонтирован в передней или задней части соответствующей мотогондолы, имеющей в задней или передней каждой ее продолговатой части с внутренних бортов соответственно узлы поворотов ЦЗК или ЦПК, и связан посредством муфты сцепления с соответствующим Т-образным при виде сбоку промежуточным редуктором, снабженным двумя выходными потоками, первым нижними из них каждый ТДД передает крутящий момент посредством продольного вала с угловым редуктором и поперечным задним валом, проложенным в носке ЦЗК, на редуктор соответствующего меньшего винта ДНС-Х2, связанного с другим посредством синхронизирующего вала, а вторым из них потоком, передающим крутящий момент от каждого ТДД вертикальным выходным валом, который связан посредством муфты сцепления с соответствующим угловым редуктором, имеющим вертикальный вал, сцентрированный подшипниковым узлом внутри полого вала зубчатого сектора узла поворота каждой консоли КТЧ и связанный через второй угловой редуктор и посредством поперечного вала, проходящего в носке каждой внешней консоли КТЧ и ее профилированном пилоне, с консольным угловым редуктором соответствующего большего НВ в ПНВС-Х2, при этом левый и правый зубчатый сектор КТЧ, установленный на нижней поверхности его внешней консоли и изменяющий ее стреловидность посредством ее поворота вперед по полету в плоскости хорды КТЧ, смонтирован в соответствующем узле поворота на верхних бортах мотогондол так, что каждый из зубчатых секторов, имеющих необходимый центральный угол, находится в зацеплении и взаимодействует при этом с приводной шестерней соответствующего узла поворота консоли КТЧ, создающего перед взлетом при их повороте на угол от 0° до -6,5° требуемый угол стреловидности КТЧ от заданной центровки или от -6,5° до -90° - стояночную конфигурацию с предварительно зафиксированными лопастями-крыльями НВ, причем при выполнении ВВП и зависания каждым промежуточным редуктором обеспечивается плавное перераспределение располагаемой взлетной мощности СУ к ПНВС-Х2 и ДНС-Х2 соответственно 90% и 10% и реализуются вертолетные режимы полета при удельной нагрузке на мощность СУ равной ρN=3,4 кг/л.с., а на самолетных режимах полета только при остановленных и зафиксированных соответствующим образом лопастях-крыльях НВ над консолями КТЧ каждым промежуточным редуктором перераспределяется 46% от взлетной мощности СУ системой трансмиссии только на меньшие винты ДНС-Х2, и обратно, при этом на палубе авианесущего корабля в транспортно-стояночной его конфигурации однолопастные НВ после их остановки и фиксации с углом установки каждой лопасти ϕ=0° так, что лопасти-крылья направлены к узлам поворота консолей КТЧ, устанавливаемым внешние его левую и правую консоли после их поворота на угол 90° по часовой и против часовой стрелки или против часовой и по часовой стрелке при виде сверху соответственно совместно с лопастями-крыльями, размещенными при этом вдоль продольной оси соответствующих подкрыльных или надкрыльных мотогондол так, что сами лопасти-крылья зафиксированы над сложенными консолями КТЧ и после их поворота вперед или назад по полету размещены к передней или задней кромке внутренних секций КТЧ, а их противовесы или телескопические противовесы, направленные в противоположные стороны консолям КТЧ или втянутые вовнутрь обтекателя их втулок, разнесены при виде сверху по обе стороны от оси симметрии в носовой или кормовой части фюзеляжа.
2. Палубный вертолет-самолет-амфибия по п. 1, отличающийся тем, что на вертолетных и самолетных режимах полета левый и правый однолопастные НВ соответственно с правым и левым упомянутыми меньшими задними НВ вращаются соответственно против часовой и по часовой стрелке или по часовой и против часовой стрелки, и левый и правый однолопастные НВ зафиксированы так, что их лопасти-крылья остановлены и направлены соответственно вовнутрь к плоскости или наружу от плоскости симметрии, образуя крыльями-лопастями НВ при виде спереди соответственно бипланную аэродинамическую схему с консолями КТЧ, имеющего с ЦЗК удлинение (λбн), составляющее величину λбн=5,78-6,28 единиц, или внешнюю ступенчатую конфигурацию с консолями КТЧ, имеющего с ЦЗК общее большое удлинение (λобщ), составляющее величину λобщ=14,83-16,13 единиц.
3. Палубный вертолет-самолет-амфибия по п. 1, отличающийся тем, что нижняя часть фюзеляжа для повышения мореходности (до 4 баллов) и обеспечения плавучести выполнена в виде герметизированной лодки, имеющей днище килеватой формы, изготовленной из композиционных материалов и снабженной центральным основным топливным баком и грузовым отсеком для основных узлов и агрегатов колесного шасси, одна двухколесная опора из которых убирается в переднюю нишу лодки, а две основные двухколесные стойки - в задние ниши герметизированных обтекателей, причем упомянутое КТЧ снабжено выдвигаемыми вниз/вверх складываемыми стойками, смонтированными в нижних нишах мотогондол с подкрыльными поплавками, повышающими поперечную остойчивость на водной поверхности.
4. Палубный вертолет-самолет-амфибия по любому из пп. 1-3, отличающийся тем, что при выполнении ВВП для повышения безопасности на торцах законцовок, упомянутого КТЧ, имеются сигнальные огни и датчики сближения, предупреждающие звуковой сиреной о недопустимом приближении с посторонними объектами, при этом автономные системы управления, включающие автопилот для осуществления самостоятельного взлета после выбора и подтверждения маршрута и систему экстренного автоматического возврата, которая включится в том случае, если оператор не будет реагировать на запросы бортового компьютера, а затем обеспечит мягкую автоматическую посадку в заданной точке или в месте вылета, и следящие системы, которые идентифицируют появившиеся на пути перелета препятствия и дадут команду на их автоматический облет, при этом широкохордовые упомянутые однолопастные винты имеют среднюю аэродинамическую хорду лопасти (bсах) и радиус профилированного противовеса (rпп), определяемые соответственно из соотношений bсах=0,11⋅Rнв, м, и rпп=0,3⋅Rнв, м (где Rнв - радиус несущих винтов), при этом каждый профилированный противовес, выполненный с обратным в плане сужением, имеет корневую и концевую хорды соответственно равновеликие и в 1,1 раза больше корневой хорды несущего винта, имеющего, в свою очередь, концевую хорду лопасти-крыла в 1,1 раза меньше его корневой хорды, снабжен законцовкой, имеющей внешнюю дугообразную и зеркально расположенную внутреннюю линии, образующие эллипсовидную в плане форму с большей ее осью, сопрягаемой с соответствующими кромками профилированного противовеса, образуя удобообтекаемую его форму, причем спереди на верхних частях фюзеляжа и обтекателя каждой мотогондолы имеются перед передней кромкой и верхней кромкой стекла кабины по три равновеликих аэродинамических гребня, параллельно смонтированных, улучшая их обтекание, так чтобы центральный размещался по продольной оси ближе к передней кромке и лобовому стеклу, а левый и правый аэродинамические гребни, в свою очередь, установлены дальше от них и при этом равноудалены от центрального, при этом он снабжен под центром масс в нижней части фюзеляжа швартующим устройством с рычагом ручного управления, имеющим на отклоняемой вниз/вверх телескопической штанге запорный механизм и устройство захвата, контактирующее с ячейками палубной решетки, обеспечивая возможность посадки на корабль при кренах до 25°.
| ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2005 |
|
RU2310583C2 |
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| US 7918415 B2, 05.04.2011 | |||
| US 7665688 B2, 23.02.2010 | |||
| US 9598169 B1, 21.03.2017. | |||

