УРОВЕНЬ ТЕХНИКИ
Настоящее изобретение относится к роботу-пылесосу.
Робот-пылесос - это электрический прибор, который выполняет операцию уборки для устранения посторонних веществ, при этом двигаясь по некоторой намеченной для уборки области. Робот-пылесос снабжен модулем улавливания пыли для сбора посторонних веществ, всасываемых вместе с воздухом. Модуль улавливания пыли включает в себя фильтр для фильтрации посторонних веществ из воздуха и пылеулавливающий контейнер для сбора отфильтрованных посредством фильтра посторонних веществ. Пылеулавливающий контейнер съемным образом предоставляется в роботе-пылесосе, и фильтр съемным образом предоставляется в пылеулавливающем контейнере.
Недостаток в традиционном роботе-пылесосе в том, что робот-пылесос работает, когда только пылеулавливающий контейнер присоединен к роботу-пылесосу, без присоединения фильтра к нему. В таком случае, поскольку посторонние вещества, всасываемые вместе с воздухом в робот-пылесос, не фильтруются посредством фильтра, посторонние вещества выпускаются наружу из робота-пылесоса. Соответственно, может быть трудным аккуратно выполнять операцию уборки посредством робота-пылесоса.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В соответствии с вариантами осуществления предоставляется робот-пылесос.
В соответствии с одним аспектом предоставляется робот-пылесос, включающий в себя основной корпус, модуль всасывания, который всасывает воздух, включающий в себя посторонние вещества, в основной корпус, модуль перемещения, который перемещает основной корпус, модуль улавливания пыли, который имеет фильтр для фильтрации посторонних веществ, включенных в воздух, всасываемый посредством модуля всасывания, и пылеулавливающий контейнер для сбора посторонних веществ, отфильтрованных посредством фильтра, и модуль обнаружения, который обнаруживает, присоединен или нет фильтр к основному корпусу.
В соответствии с другим аспектом предоставляется робот-пылесос, включающий в себя основной корпус, в котором сформирована установочная часть, модуль всасывания, предусмотренный в основном корпусе, чтобы всасывать воздух, включающий в себя посторонние вещества, в основной корпус, модуль перемещения, предусмотренный в основном корпусе, чтобы перемещать основной корпус, модуль улавливания пыли, который установлен в установочную часть и имеет фильтр для фильтрации посторонних веществ, включенных в воздух, всасываемый посредством модуля всасывания, модуль обнаружения, который обнаруживает, что фильтр модуля улавливания пыли установлен в установочную часть, и модуль управления, который ограничивает работу модуля всасывания, когда фильтр не обнаружен посредством модуля обнаружения.
Подробности одного или более вариантов осуществления изложены на прилагаемых чертежах и в нижеприведенном описании. Другие признаки будут понятны из описания и чертежей и из формулы изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - это покомпонентный вид в перспективе робота-пылесоса в соответствии с первым вариантом осуществления.
Фиг. 2 - это покомпонентный вид в перспективе модуля улавливания пыли в соответствии с первым вариантом осуществления.
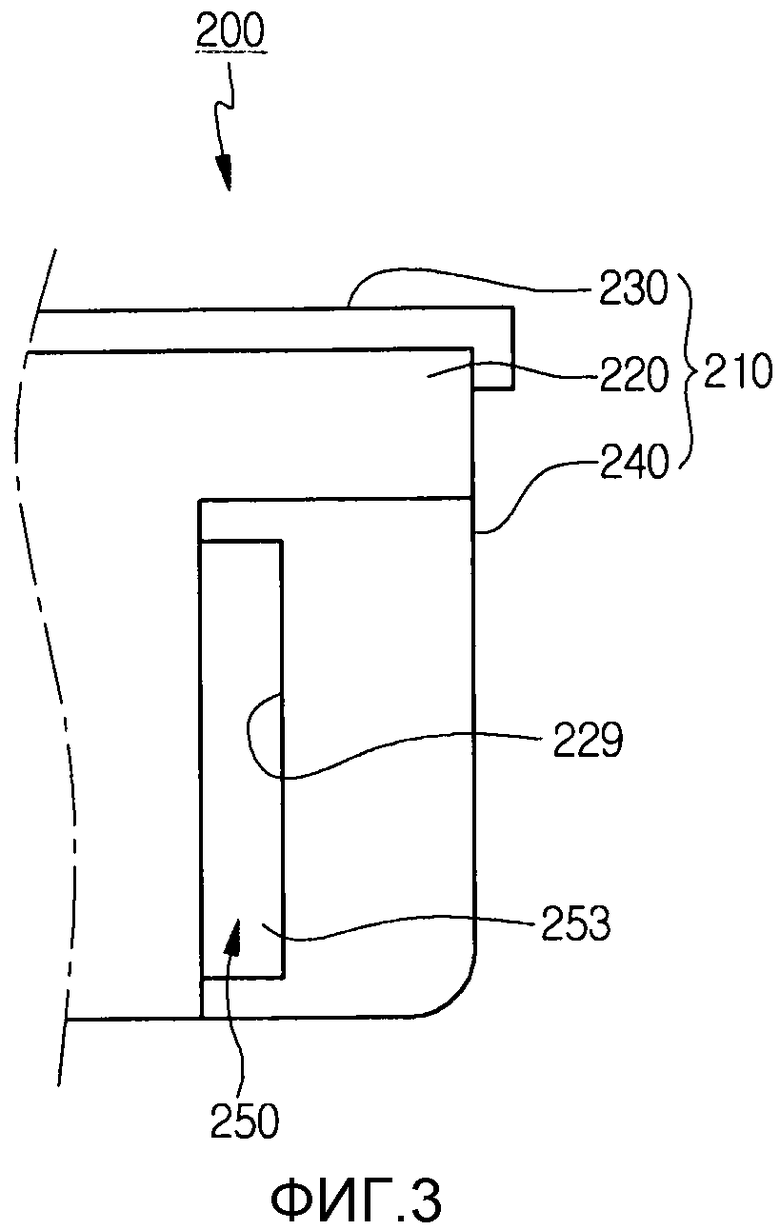
Фиг. 3 - это вид сбоку, иллюстрирующий основную часть модуля улавливания пыли в соответствии с первым вариантом осуществления.
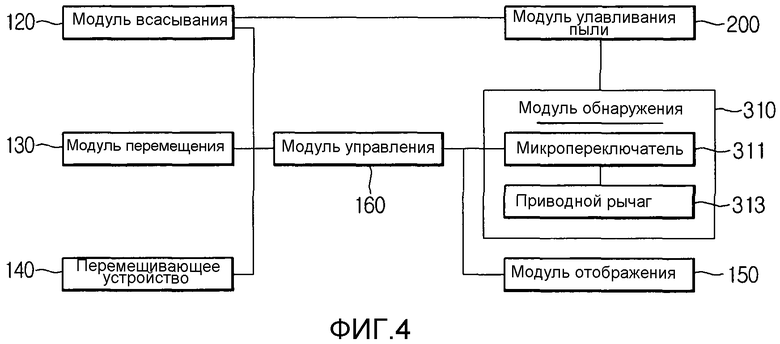
Фиг. 4 - это блок-схема робота-пылесоса в соответствии с первым вариантом осуществления.
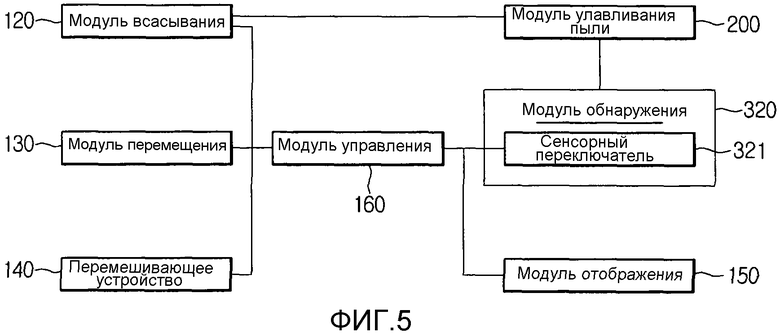
Фиг. 5 - это схематичный чертеж конфигурации робота-пылесоса в соответствии со вторым вариантом осуществления.
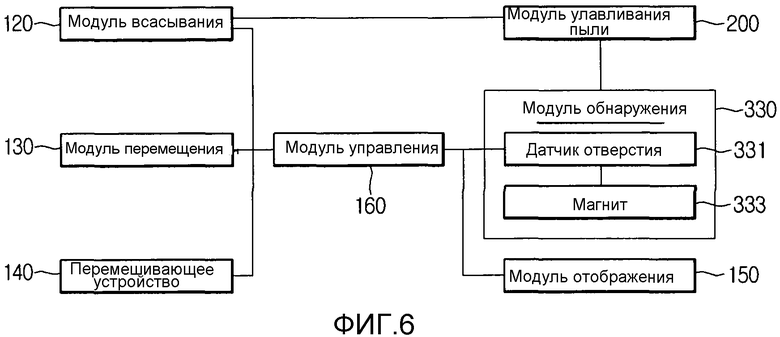
Фиг. 6 - это схематичный чертеж конфигурации робота-пылесоса в соответствии с третьим вариантом осуществления.
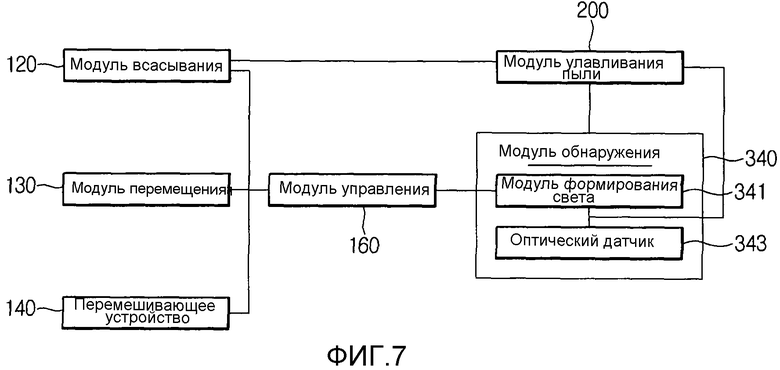
Фиг. 7 - это схематичный чертеж конфигурации робота-пылесоса в соответствии с четвертым вариантом осуществления.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Сейчас будет сделана ссылка в деталях на варианты осуществления настоящего открытия, примеры которого проиллюстрированы на сопровождающих чертежах.
В последующем подробном описании предпочтительных вариантов осуществления ссылка делается на сопровождающие чертежи, которые формируют часть этого описания и на которых показаны посредством иллюстрации конкретные предпочтительные варианты осуществления, в которых изобретение может быть применено на практике. Эти варианты осуществления описываются достаточно подробно, чтобы позволять специалистам в области техники применять на практике изобретение, и понятно, что могут быть использованы другие варианты осуществления, и что логические, структурные, механические, электрические и химические изменения могут быть сделаны без отступления от духа или рамок изобретения. Чтобы избежать деталей, не нужных для того, чтобы позволять специалистам в области техники применять на практике изобретение, описание может исключать некоторую информацию, известную специалистам в области техники. Последующее подробное описание, следовательно, не должно восприниматься в ограничивающем смысле.
Фиг. 1 является покомпонентным видом в перспективе робота-пылесоса в соответствии с первым вариантом осуществления, фиг. 2 является покомпонентным видом в перспективе модуля улавливания пыли в соответствии с первым вариантом осуществления, фиг. 3 является видом сбоку, иллюстрирующим основную часть модуля улавливания пыли в соответствии с первым вариантом осуществления, и фиг. 4 является блок-схемой робота-пылесоса в соответствии с первым вариантом осуществления.
Во-первых, обращаясь к фиг. 1, робот-пылесос 100 включает в себя основной корпус 110, имеющий отверстие для всасывания. Отверстие для всасывания предусмотрено, чтобы всасывать воздух, включающий в себя посторонние вещества, в робот-пылесос 100, в частности в основной корпус 110. Дополнительно, выпускная щель (не показана) сформирована на одной стороне основного корпуса 110. Выпускная щель предусмотрена, чтобы выпускать воздух, включающий в себя посторонние вещества, всасываемый в робот-пылесос 100, т.е. основной корпус 110, через отверстие для всасывания, наружу из основного корпуса 110.
Между тем, внутри основного корпуса 110 предусмотрены различные части робота-пылесоса 100. В качестве примера, модуль 120 всасывания (см. фиг. 4), модуль 130 перемещения и перемешивающее устройство 140 могут быть установлены внутри основного корпуса 110. Модуль 120 всасывания обеспечивает движущую силу для всасывания воздуха, включающего в себя посторонние вещества, в робот-пылесос 100, т.е. основной корпус 110. Модуль 130 перемещения обеспечивает движущую силу для движения робота-пылесоса 100. Перемешивающее устройство 140 выставлено наружу через отверстие для всасывания, чтобы устранять посторонние вещества с намеченного для уборки объекта.
Установочная выемка 111 (или установочная часть) сформирована на верхней поверхности основного корпуса 110. Установочная выемка 111 сформирована так, что часть основного корпуса 110 углублена вниз. Модуль 200 улавливания пыли, который будет описан ниже, установлен в установочной выемке 111. В качестве примера, установочная выемка 111 может быть сформирована так, что часть основного корпуса 110 углублена вниз, по существу, в шестигранной форме, но не ограничена этим. Установочная выемка 111 расположена на пути потока воздуха, который всасывается в основной корпус 110 через отверстие для всасывания и затем выпускается наружу из основного корпуса 110 через выпускную щель.
Хотя не показано, крышка присоединена к основному корпусу 110. Крышка служит для того, чтобы открывать или закрывать установочную выемку 111. Чтобы достигать этого, крышка предусмотрена с возможностью поворота на основном корпусе 110.
Между тем, модуль 200 улавливания пыли съемным образом предусмотрен в основном корпусе 110. Модуль 200 улавливания пыли вертикально прикреплен к основному корпусу 110. Посторонние вещества, включенные в воздух, всасываемый посредством модуля 120 всасывания, собираются в модуле 200 улавливания пыли.
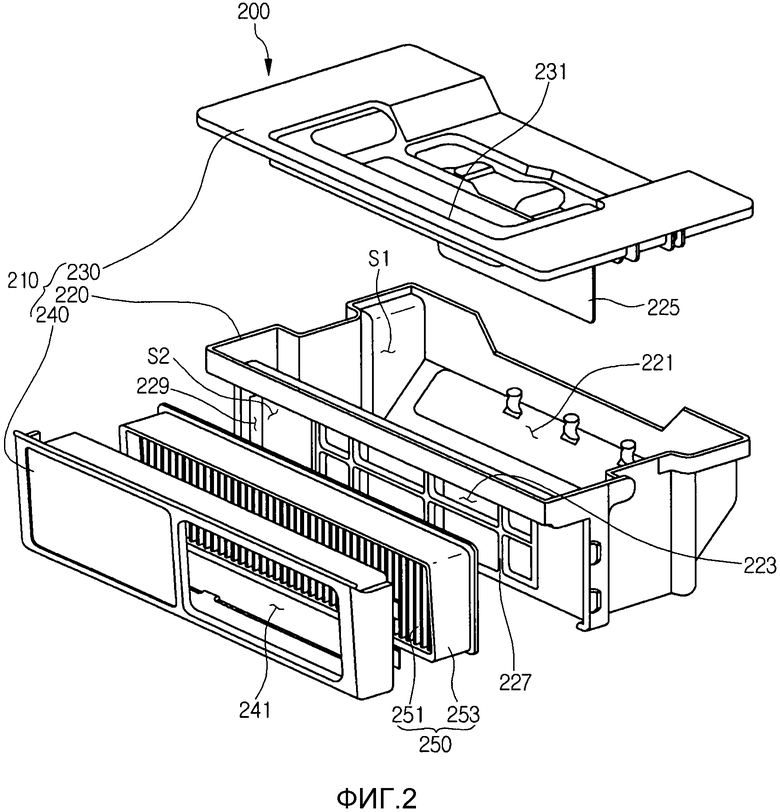
Обращаясь к фиг. 2 и 3, модуль 200 улавливания пыли включает в себя пылеулавливающий контейнер 210 и фильтр 250.
Пылеулавливающий контейнер 210 задает пространство S1 улавливания пыли, в котором собираются вещества. Пылеулавливающий контейнер 210 включает в себя корпус 220 контейнера, крышку 230 контейнера и кронштейн 240 фильтра.
Корпус 220 контейнера сформирован, по существу, в многогранной форме, имеющей верхнее отверстие, но не ограничен этим. Всасывающее отверстие 221 и соединительное отверстие 223 сформированы в корпусе 220 контейнера. Всасывающее отверстие 221 и соединительное отверстие 223 сформированы посредством вырезания части двух поверхностей корпуса 220 контейнера, обращенных друг к другу, соответственно. Всасывающее отверстие 221 служит для того, чтобы всасывать воздух, включающий в себя посторонние вещества, в пространство S1 улавливания пыли посредством модуля 120 всасывания.
Соединительное отверстие 223 служит для доставки воздуха, который был всосан в пространство S1 улавливания пыли посредством модуля 120 всасывания и затем отфильтрован посредством фильтра 250, чтобы устранять посторонние вещества, по направлению к выпускному отверстию 241, которое будет описано ниже.
Кроме того, заслонка 225 предусмотрена в корпусе 220 контейнера. Заслонка 225 служит, чтобы выборочно открывать или закрывать всасывающее отверстие 221. Чтобы достигать этого, заслонка 225 может быть предусмотрена с возможностью поворота на корпусе 220 контейнера. Фиг. 2 иллюстрирует примерный контейнер, где заслонка 225 отделена от корпуса 220 контейнера.
Заслонка 225 поворачивается вместе с потоком воздуха, всасываемого в пространство S1 улавливания пыли через всасывающее отверстие 221, чтобы открывать всасывающее отверстие 221.
Опорное ребро 227 предусмотрено в корпусе 220 контейнера. Опорное ребро 227 предусмотрено в корпусе 220 контейнера рядом с соединительным отверстием 223, по существу, в форме решетки. Опорное ребро 227 служит для того, чтобы поддерживать фильтр 250, предусмотренный в соединительном отверстии 223.
Пространство S2 для установки фильтра сформировано в корпусе 220 контейнера. Фильтр 250 установлен в пространстве S2 для установки фильтра. Пространство S2 для установки фильтра может быть задано посредством кронштейна 240 фильтра и частей обеих боковых поверхностей корпуса 220 контейнера.
Дополнительно, раскрывающее фильтр отверстие 229 сформировано в корпусе 220 контейнера. Часть фильтра 250, установленного в пространстве S2 для установки фильтра, выставлена наружу из пылеулавливающего контейнера 210 через раскрывающее фильтр отверстие 229.
В качестве примера, раскрывающее фильтр отверстие 229 может быть сформировано посредством вырезания части боковой поверхности корпуса 220 контейнера для задания пространства S2 для установки фильтра.
Крышка 230 контейнера выборочно открывает или закрывает верхнюю поверхность корпуса 220 контейнера. Чтобы достигать этого, крышка 230 контейнера выборочно прикреплена к корпусу 220 контейнера туго посаженным образом, например. Альтернативно, крышка 230 контейнера может быть предусмотрена с возможностью поворота на корпусе 220 контейнера. Когда крышка 230 контейнера предусмотрена с возможностью поворота на корпусе 220 контейнера, крышка 230 контейнера прикреплена к корпусу 220 контейнера, в то же время покрывая корпус 220 контейнера. Ручка 231, удерживаемая пользователем, может быть предусмотрена на крышке 230 контейнера, чтобы фиксировать модуль 200 улавливания пыли в установочной выемке 111 или отделять модуль 200 улавливания пыли от установочной выемки 111.
Кронштейн 240 фильтра служит для крепления фильтра 250, установленного в пространстве S2 для установки фильтра. Чтобы достигать этого, кронштейн 240 фильтра прикреплен к корпусу 220 контейнера, чтобы покрывать пространство S2 для установки фильтра. Кроме того, выпускное отверстие 241 сформировано в кронштейне 240 фильтра. Выпускное отверстие 241 сформировано посредством вырезания части кронштейна 240 фильтра. Выпускное отверстие 241 предусмотрено, чтобы выпускать воздух, который был всосан в пространство S1 улавливания пыли и затем отфильтрован посредством фильтра 250, чтобы устранять посторонние вещества, наружу из пространства S1 улавливания пыли. В частности, выпускное отверстие 241 сообщается с выпускной щелью, когда модуль 200 улавливания пыли установлен в установочную выемку 111. В этом варианте осуществления, выпускное отверстие 241 имеет область поперечного сечения протока, относительно более узкое, чем у соединительного отверстия 223.
Фильтр 250 служит для того, чтобы фильтровать посторонние вещества, включенные в воздух, всасываемый в пространство S1 улавливания пыли. Фильтр 250 установлен в пространстве S2 для установки фильтра. Фильтр 250 включает в себя фильтрующий элемент 251 и рамку 253 фильтра. Фильтрующий элемент 251 может иметь продольное поперечное сечение, имеющее размер, который, по существу, равен размеру соединительного отверстия 223. Таким образом, площадь фильтра 250 относительно больше, чем площадь поперечного сечения протока выпускного отверстия 241.
Рамка 253 фильтра предусмотрена на ободе фильтрующего элемента 251. В частности, когда фильтр 250 установлен в пространстве S2 для установки фильтра, часть рамки 253 фильтра выставлена наружу из пространства S1 улавливания пыли через раскрывающее фильтр отверстие 229.
Обращаясь обратно к фиг. 1 и 4, модуль 310 обнаружения предусмотрен в установочной выемке 111. Модуль 310 обнаружения служит для обнаружения того, установлен или нет модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, в установочную выемку 111. В этом варианте осуществления модуль 310 обнаружения включает в себя микропереключатель 311 и приводной рычаг 313. Микропереключатель 311 включается или выключается в зависимости от того, присоединен или нет фильтр 250 к модулю 200 улавливания пыли, установленному в установочной выемке 111. Приводной рычаг 313 предусмотрен на одной стороне установочной выемки 111 и выборочно приводится в действие фильтром 250, чтобы включать или выключать микропереключатель 311, когда модуль 200 улавливания пыли устанавливается в установочную выемку 111. В частности, актуатор (не показан) микропереключателя 311 приводится в действие посредством приводного рычага 313. В качестве примера, когда модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, установлен в установочной выемке 111, на приводной рычаг 313 нажимает фильтр 250, выставленный через раскрывающее фильтр отверстие 229, чтобы включать микропереключатель 311. Когда модуль 200 улавливания пыли не установлен в установочную выемку 111, или когда модуль 200 улавливания пыли установлен в установочной выемке 111, в то время как фильтр 250 не присоединен к нему, фильтр 250 не нажимает на приводной рычаг 313, и приводной рычаг 313 расположен в раскрывающем фильтр отверстии 229. Соответственно, микропереключатель 311 удерживается в выключенном состоянии. Иначе, приводной рычаг 313 может быть не предусмотрен, и актуатор микропереключателя 311 может напрямую приводиться в действие посредством фильтра 250.
Модуль 150 отображения отображает информацию о роботе-пылесосе 100, т.е. информацию об операции уборки. В частности, в этом варианте осуществления, модуль 150 отображения отображает, присоединен или нет фильтр 250 к модулю 200 улавливания пыли, установленному в установочной выемке 111. В качестве примера, когда фильтр 250 не присоединен к модулю 200 улавливания пыли, установленному в установочной выемке 111, модуль 150 отображения может отображать сигнал для уведомления пользователя о неустановленном состоянии фильтра 250.
Между тем, модуль 160 управления управляет роботом-пылесосом 100. Чтобы обеспечивать это, модуль 160 управления может управлять, по меньшей мере, операциями модуля 120 всасывания, модуля 130 перемещения, перемешивающего устройства 140 и модуля 150 отображения. В этом варианте осуществления модуль 160 управления может управлять работой робота-пылесоса 100 в зависимости от того, установлен или нет модуль 200 улавливания пыли с фильтром, присоединенным к нему, в установочной выемке 111. Более конкретно, когда модуль 310 обнаружения обнаруживает, что модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, установлен в установочной выемке 111, модуль 160 управления управляет роботом-пылесосом 100, чтобы выполнять операцию уборки. Между тем, даже если фильтр 250 не присоединен к модулю 200 улавливания пыли, когда модуль 310 обнаружения обнаруживает, что модуль 200 улавливания пыли установлен в установочной выемке 111, модуль 160 управления управляет модулем 120 всасывания, чтобы он не работал. Кроме того, модуль 160 управления может управлять модулем 130 перемещения и/или перемешивающим устройством 140, чтобы они не работали.
В случаях, отличных от случая, когда обнаруживается, что модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, установлен в установочной выемке 111, модуль 160 управления может управлять модулем 150 отображения, чтобы отображать сигнал для уведомления пользователя о неустановленном состоянии фильтра 250.
Дополнительно, хотя не иллюстрировано, перезаряжаемая батарея может быть предусмотрена в основном корпусе 110. Перезаряжаемая батарея подает энергию для работы различных частей робота-пылесоса 100.
Далее в данном документе будет объяснена работа робота-пылесоса в соответствии с настоящим изобретением.
Сначала, когда сигнал начала работы робота-пылесоса 100, т.е. операции уборки, вводится пользователем, операции модуля 120 всасывания и модуля 130 перемещения начинаются посредством модуля 160 управления, и тогда операция уборки выполняется, чтобы устранять посторонние вещества во время движения по определенной, намеченной для уборки области.
Кроме того, операции перемешивающего устройства 140 и модуля 150 отображения начинаются посредством модуля 160 управления, чтобы отображать информацию об устранении посторонних веществ с намеченного для уборки объекта и об операции уборки.
Более конкретно, когда модуль 120 всасывания задействован, воздух, включающий в себя посторонние вещества, всасывается в основной корпус 110 через отверстие для всасывания. Таким образом, воздух, всасываемый в основной корпус 110, проходит через модуль 200 улавливания пыли посредством непрерывной работы модуля 120 всасывания. Т.е. воздух, включающий в себя посторонние вещества, всасывается в пространство S1 улавливания пыли через всасывающее отверстие 221. Воздух, всасываемый в пространство S1 улавливания пыли, проходит через фильтр 250, чтобы отфильтровывать посторонние вещества, и затем выпускается наружу из пространства S1 улавливания пыли через выпускное отверстие 241. В это время посторонние вещества, отфильтрованные посредством фильтра 250, собираются в пространстве S1 улавливания пыли. Воздух, выпущенный наружу из пространства S1 улавливания пыли, т.е. наружу из модуля 200 улавливания пыли, через выпускное отверстие 241, выпускается наружу из основного корпуса 110 через выпускную щель.
Между тем, в этом варианте осуществления, работа робота-пылесоса 100 может управляться в зависимости от того, установлен или нет модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, в установочной выемке 111.
Т.е., только когда модуль 310 обнаружения обнаруживает, что модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, установлен в установочной выемке 111, модуль 160 управления управляет, по меньшей мере, работой модуля 120 всасывания, чтобы управлять вышеупомянутой операцией уборки. Другими словами, в случаях, отличных от случая, когда модуль 310 обнаружения обнаруживает, что модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, установлен в установочной выемке 111, модуль 160 управления управляет, по меньшей мере, модулем 120 всасывания, чтобы он не работал.
В заключение, даже если неустановленное состояние фильтра 250 обнаружено, когда принимается команда задействования основного корпуса 110, модуль 120 всасывания и модуль 130 перемещения могут не задействоваться (операции модуля всасывания и модуля перемещения ограничиваются).
В этом варианте осуществления площадь фильтра 250 имеет значение, относительно более высокое, чем значение площади поперечного сечения протока выпускного отверстия 241. Соответственно, даже если фильтр 250, имеющий размер, по существу, равный размеру выпускного отверстия 241, в частности, фильтрующий элемент 251, поврежден посторонними веществами, так что воздух не проходит через фильтрующий элемент 251, воздух может проходить через другую часть фильтрующего элемента 251.
Фиг. 5 - это схематичный чертеж конфигурации робота-пылесоса в соответствии со вторым вариантом осуществления. В этом варианте осуществления те же части, что и в первом варианте осуществления настоящего изобретения будут обозначены теми же ссылочными номерами, что и на фиг. 1-4, и их ненужное описание будет исключено.
Обращаясь к фиг. 5, в этом варианте осуществления модуль 320 обнаружения для обнаружения того, установлен или нет модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, в установочной выемке 111, включает в себя сенсорный переключатель 321. Сенсорный переключатель 321 предусмотрен на одной стороне установочной выемки 111. Сенсорный переключатель 321 включается или выключается посредством фильтра 20, в частности одной стороны фильтра 20, выставленной через раскрывающее фильтр отверстие 229, когда модуль 200 улавливания пыли установлен в установочной выемке 111.
Фиг. 6 - это схематичный чертеж конфигурации робота-пылесоса в соответствии с третьим вариантом осуществления. В этом варианте осуществления те же части, что и в первом варианте осуществления настоящего изобретения, будут обозначены теми же ссылочными номерами, что и на фиг. 1-4, и их ненужное описание будет исключено.
Обращаясь к фиг. 6, в этом варианте осуществления модуль 330 обнаружения для обнаружения того, установлен или нет модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, в установочной выемке 111, включает в себя датчик 331 Холла и магнит 333. Датчик 331 Холла предусмотрен на одной стороне установочной выемки 111. Магнит 333 может быть предусмотрен в фильтре 250. Когда модуль 200 улавливания пыли установлен в установочной выемке 111, датчик 331 Холла обнаруживает магнитное поле магнита 333, так что модуль 330 обнаружения обнаруживает, установлен или нет модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, в установочной выемке 111. В этом варианте осуществления раскрывающее фильтр отверстие 229 может быть удалено в зависимости от величины магнитного поля магнита 333.
Фиг. 7 - это схематичный чертеж конфигурации робота-пылесоса в соответствии с четвертым вариантом осуществления. В этом варианте осуществления те же части, что и в первом варианте осуществления настоящего изобретения будут обозначены теми же ссылочными номерами, что и на фиг. 1-4, и их ненужное описание будет исключено.
Обращаясь к фиг. 7, в этом варианте осуществления модуль 340 обнаружения для обнаружения того, установлен или нет модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, в установочной выемке 111, включает в себя модуль 341 формирования света и оптический датчик 343. Модуль 341 формирования света формирует свет в предварительно определенном направлении, а оптический датчик 343 обнаруживает свет, сформированный посредством модуля 341 формирования света. Передающие свет отверстия (не показаны) сформированы в модуле 200 улавливания пыли, т.е. пылеулавливающем контейнере 210. Когда модуль 200 улавливания пыли установлен в установочной выемке 111, передающие свет отверстия расположены на пути света, сформированного посредством модуля 341 формирования света. В частности, раскрывающее фильтр отверстие 229 в первом варианте осуществления настоящего изобретения сформировано на обеих боковых поверхностях корпуса 220 контейнера, соответственно, и, таким образом, передающие свет отверстия формируются. Передающие свет отверстия выборочно открываются или закрываются пылесборным контейнером 210, т.е. фильтром 250, установленным в пространстве S2 для установки фильтра. В частности, передающие свет отверстия сформированы посредством соответствующего вырезания частей пылеулавливающего контейнера 210, которые являются двумя поверхностями пространства S2 для установки фильтра, обращенными друг к другу.
Соответственно, в этом варианте осуществления, когда модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, установлен в установочной выемке 111, оптический датчик 343 не обнаруживает свет, сформированный посредством модуля 341 формирования света. Однако, в случаях, отличных от случая, когда модуль 200 улавливания пыли с фильтром 250, присоединенным к нему, установлен в установочной выемке 111, оптический датчик 343 обнаруживает свет, сформированный посредством модуля 341 формирования света. Т.е. фильтр 250 располагается между модулем 341 формирования света и оптическим датчиком 343.
Должно быть понятно специалистам в области техники, что различные модификации могут быть внесены без изменения технической концепции настоящего изобретения, и что рамки настоящего изобретения определены прилагаемой формулой изобретения.
Вышеупомянутые варианты осуществления описали, что в случаях, отличных от случая, когда модуль обнаружения обнаруживает, что пылеулавливающий контейнер с фильтром, присоединенным к нему, установлен в установочной выемке, модуль управления управляет работой модуля всасывания. Однако, когда модуль обнаружения включает в себя микропереключатель или сенсорный переключатель, энергия, подаваемая к модулю всасывания, непосредственно выключается в зависимости от включенной работы или выключенной работы микропереключателя или сенсорного переключателя.
Хотя варианты осуществления описаны со ссылкой на ряд иллюстративных вариантов осуществления, следует понимать, что множество других модификаций и вариантов осуществления может быть разработано специалистами в данной области техники, которые находятся в рамках сущности и объема принципов этого раскрытия сущности. Более конкретно, различные изменения и модификации являются возможными в составных частях и/или компоновках надлежащей компоновки комбинаций в рамках объема раскрытия сущности, чертежей и прилагаемой формулы изобретения. В дополнение к изменениям и модификациям в составных частях и/или компоновках, альтернативные варианты использования также должны быть очевидными для специалистов в данной области техники.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЫЛЕУЛАВЛИВАЮЩЕЕ УСТРОЙСТВО И ПЫЛЕСОС ДЛЯ МОКРОЙ И СУХОЙ ЧИСТКИ, В КОТОРОМ ИСПОЛЬЗУЕТСЯ ТАКОЕ УСТРОЙСТВО | 2004 |
|
RU2286710C2 |
| КОМПАКТНЫЙ РОБОТ-ПЫЛЕСОС | 2006 |
|
RU2337603C2 |
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| ЧИСТЯЩИЙ БЛОК ПЫЛЕСОСА (варианты) | 2020 |
|
RU2785335C1 |
| ЦИКЛОННОЕ ПЫЛЕУЛАВЛИВАЮЩЕЕ УСТРОЙСТВО ПЫЛЕСОСА | 2003 |
|
RU2262289C2 |
| РОБОТ-ПЫЛЕСОС | 2003 |
|
RU2264159C2 |
| ПЫЛЕСОС | 2003 |
|
RU2257830C2 |
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2601931C2 |
| ПЫЛЕСОС (ВАРИАНТЫ) | 2006 |
|
RU2339290C2 |
| ЦИКЛОННОЕ ПЫЛЕУЛАВЛИВАЮЩЕЕ УСТРОЙСТВО И ПЫЛЕСОС С УСТРОЙСТВОМ | 2004 |
|
RU2281018C2 |
Предоставлен робот-пылесос, включающий в себя основной корпус, модуль всасывания, который всасывает воздух, включающий в себя посторонние вещества, в основной корпус, модуль перемещения, который перемещает основной корпус, модуль улавливания пыли, который имеет фильтр для фильтрации посторонних веществ, включенных в воздух, всасываемый посредством модуля всасывания, и пылеулавливающий контейнер, который собирает посторонние вещества, отфильтрованные посредством фильтра, и модуль обнаружения, который обнаруживает, присоединен или нет фильтр к основному корпусу. 2 н. и 17 з.п. ф-лы, 7 ил.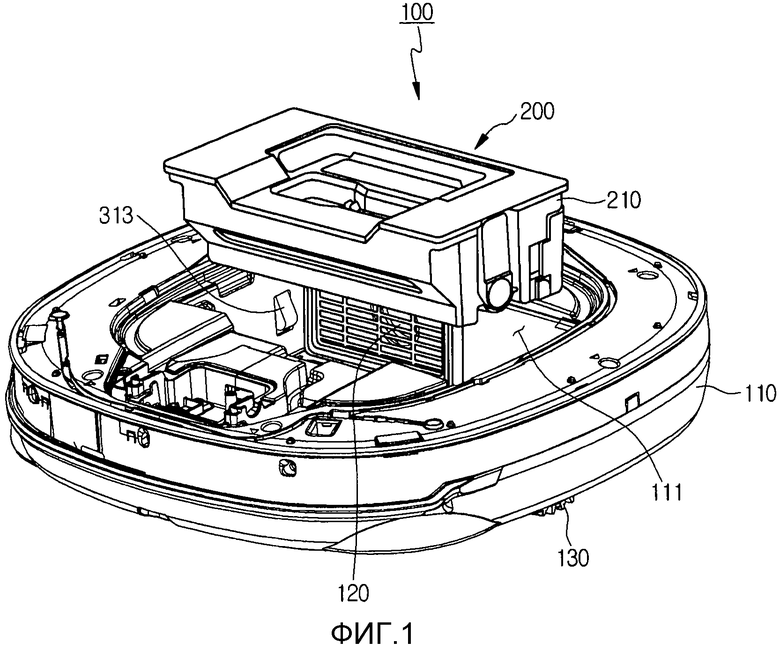
1. Робот-пылесос, содержащий:
основной корпус;
модуль всасывания, который всасывает воздух, содержащий посторонние вещества, в основной корпус;
модуль перемещения, который перемещает основной корпус;
модуль улавливания пыли, который имеет фильтр для фильтрации посторонних веществ, содержащихся в воздухе, всасываемом посредством модуля всасывания, и пылеулавливающий контейнер, который собирает посторонние вещества, отфильтрованные посредством фильтра; и
модуль обнаружения, который определяет, присоединен ли фильтр к основному корпусу;
при этом фильтр присоединен с возможностью отсоединения к пылеулавливающему контейнеру, и фильтр присоединен к основному корпусу в состоянии, при котором фильтр присоединен к пылеулавливающему контейнеру.
2. Робот-пылесос по п. 1, в котором модуль улавливания пыли включает в себя корпус контейнера и крышку контейнера, причем в корпусе контейнера сформировано всасывающее отверстие, и в корпусе контейнера обеспечена заслонка для выборочного открывания или закрывания всасывающего отверстия.
3. Робот-пылесос по п. 1, в котором модуль обнаружения включает в себя микропереключатель, включаемый или выключаемый с помощью фильтра.
4. Робот-пылесос по п. 3, в котором в пылеулавливающем контейнере выполнено отверстие доступа к части фильтра снаружи пылеулавливающего контейнера, и микропереключатель включается или выключается с помощью фильтра через отверстие.
5. Робот-пылесос по п. 3, в котором в пылеулавливающем контейнере выполнено отверстие доступа к части фильтра снаружи пылеулавливающего контейнера, и для включения или выключения микропереключателя на основном корпусе имеется приводной рычаг, управляемый фильтром, доступным через отверстие.
6. Робот-пылесос по п. 1, в котором модуль обнаружения включает в себя сенсорный переключатель, включаемый или выключаемый посредством прикосновения фильтра.
7. Робот-пылесос по п. 6, в котором в пылеулавливающем контейнере выполнено отверстие доступа к части фильтра снаружи пылеулавливающего контейнера, и сенсорного переключателя касается фильтр, доступный через отверстие.
8. Робот-пылесос по п. 1, в котором модуль обнаружения включает в себя магнит, предусмотренный в фильтре, и датчик, предусмотренный в основном корпусе для обнаружения магнитного поля магнита.
9. Робот-пылесос по п. 1, в котором модуль обнаружения включает в себя модуль формирования света, предусмотренный в основном корпусе, и оптический датчик для обнаружения света, излучаемого из модуля формирования света, причем оптический датчик не обнаруживает свет, излучаемый из модуля формирования света, когда фильтр присоединен к основному корпусу, и оптический датчик обнаруживает свет, излучаемый из модуля формирования света, когда фильтр не присоединен к основному корпусу.
10. Робот-пылесос по п. 9, в котором фильтр расположен между модулем формирования света и оптическим датчиком, когда фильтр присоединен к основному корпусу.
11. Робот-пылесос по п. 9, в котором в пылеулавливающем контейнере сформировано множество отверстий, через которые проходит свет, и фильтр покрывает множество отверстий, когда фильтр присоединен к пылеулавливающему контейнеру.
12. Робот-пылесос по п. 1, дополнительно содержащий модуль отображения, который отображает информацию для уведомления о состоянии, в котором фильтр не установлен, даже когда принята команда на работу основного модуля, если определено состояние, в котором фильтр не установлен.
13. Робот-пылесос по п. 1, в котором модуль всасывания не работает, даже когда принята команда на работу основного модуля, если определено состояние, в котором фильтр не установлен.
14. Робот-пылесос по п. 1, в котором модуль перемещения не работает, даже когда принята команда на работу основного модуля, если определено состояние, в котором фильтр не установлен.
15. Робот-пылесос, содержащий:
основной корпус, в котором сформирована установочная часть;
модуль всасывания, предусмотренный в основном корпусе, чтобы всасывать воздух, содержащий посторонние вещества, в основной корпус;
модуль перемещения, предусмотренный в основном корпусе, чтобы перемещать основной корпус;
модуль улавливания пыли, который установлен в установочной части и имеет фильтр для фильтрации посторонних веществ, содержащихся в воздухе, всасываемом посредством модуля всасывания;
модуль обнаружения, который определяет, что фильтр модуля улавливания пыли установлен в установочную часть; и
модуль управления, который ограничивает работу модуля всасывания, когда модуль обнаружения определяет, что фильтр не установлен;
при этом модуль управления ограничивает работу модуля перемещения, когда модуль обнаружения определяет, что фильтр не установлен.
16. Робот-пылесос по п. 15, в котором модуль управления включает модуль всасывания, когда модуль обнаружения определяет, что фильтр установлен.
17. Робот-пылесос по п. 15, дополнительно содержащий модуль отображения, который отображает информацию для уведомления о состоянии, в котором фильтр не установлен, когда модуль обнаружения определяет, что фильтр не установлен.
18. Робот-пылесос по п. 15, в котором модуль обнаружения включает в себя микропереключатель, включаемый или выключаемый с помощью фильтра, сенсорный переключатель, которого касается фильтр, или датчик Холла для обнаружения магнита, имеющегося на фильтре.
19. Робот-пылесос по п. 15, в котором модуль обнаружения включает в себя модуль формирования света, предусмотренный в фиксирующей части, и оптический датчик для обнаружения света, излучаемого из модуля формирования света, причем оптический датчик не обнаруживает свет, излучаемый из модуля формирования света, когда фильтр присоединен к основному корпусу, и оптический датчик обнаруживает свет, излучаемый из модуля формирования света, когда фильтр не присоединен к основному корпусу.

