Область техники, к которой относится изобретение
[0001] Настоящее раскрытие относится к чистящему блоку, а более конкретно, к чистящему блоку, имеющему перемешиватель с вращающейся щеткой, когда пылесос эксплуатируется на ковре.
Уровень техники
[0002] Пылесос является устройством, которое выполняет функцию вакуумной чистки, всасывая пыль и посторонние вещества вместе с воздухом и отделяя их для сбора пыли. Пылесос включает в себя модуль всасывающего сопла, и модуль всасывающего сопла приходит в соприкосновение с поверхностью, которая должна быть очищена, чтобы всасывать пыль и посторонние вещества, присутствующие на поверхности, вместе с воздухом. В частности, пылесос, главным образом, эксплуатируется в окружающей обстановке пола.
[0003] Модуль всасывающего сопла имеет перемешиватель для сгона или захвата пыли и посторонних веществ с поверхности, которая должна быть очищена. Щетка или резиновая пластина выступает из внешней периферийной поверхности цилиндрической корпусной части перемешивателя, и когда перемешиватель вращается, щетка или резиновая пластина вращается вместе с ним, чтобы сгонять или захватывать пыль и посторонние вещества с пола. Согнанная или захваченная пыль и посторонние вещества всасываются через модуль всасывающего сопла для отделения и сбора.
[0004] Однако, когда окружающая обстановка пола является окружающей обстановкой ковра, поскольку модуль всасывающего сопла находится на расстоянии от поверхности ковра, щетка или резиновая пластина перемешивателя не достигает поверхности ковра, тем самым, снижая характеристику очистки.
[0005] Для того, чтобы решать проблему, необходимо продлевать длину щетки или резиновой пластины перемешивателя.
[0006] Например, публикация японского патента № CN 207666529 U (опубликованная 31 июля 2018) раскрывает перемешиватель, приспособленный для изменения длины щетки ступенчатым образом, в котором множество пазов, имеющих различные высоты, размещаются на корпусной части перемешивателя, чтобы предоставлять возможность щетке отделяться от и собираться во множество пазов.
[0007] Однако, для этой цели, пользователь должен отделять щетку от существующего паза и собирать ее в другом пазу всякий раз, когда окружающая обстановка пола меняется, существует гигиеническая проблема в том, что пользователь должен прикасаться к пыли, накопившейся на перемешивателе, своей рукой, потеря времени возникает из-за замены, а также существует проблема, что это не может быть применено к автоматическому чистящему устройству, такому как робот-пылесос.
[0008] С учетом гигиены и удобства пользователя, пылесос, имеющий конструкцию, приспособленную для легкой модификации длины щетки или резиновой пластины перемешивателя согласно изменению окружающей обстановки пола, должен быть предложен.
[0009] Кроме того, с учетом применимости к автоматически управляемому устройству, такому как робот-пылесос, пылесос, имеющий конструкцию, приспособленную для распознавания изменения окружающей обстановки пола, чтобы модифицировать длину щетки ил резиновой пластины перемешивателя без пользовательской манипуляции, должен быть предложен.
Сущность изобретения
Техническая задача
[0010] Аспектом настоящего раскрытия является предоставление чистящего блока, приспособленного для изменения радиуса вращения щетки в ответ на изменение окружающей обстановки пола. В частности, аспектом настоящего раскрытия является предоставление чистящего блока, имеющего конструкцию, приспособленную для легкого изменения радиуса вращения щетки без прикосновения к пыли рукой в процессе изменения радиуса вращения щетки. В частности, аспектом настоящего раскрытия является предоставление чистящего блока, имеющего конструкцию, приспособленную для автоматического изменения радиуса вращения щетки в ответ на окружающую обстановку пола.
[0011] Аспектом настоящего раскрытия является предоставление чистящего блока, имеющего конструкцию, в которой щетка может вращаться на внешней периферийной поверхности корпусной части, когда вал, вставленный в полость корпусного элемента перемешивателя в продольном направлении элемента корпусной части, перемещается горизонтально.
[0012] Аспектом настоящего раскрытия является предоставление чистящего блока, имеющего конструкцию, приспособленную для приложения соответствующего давления, когда щетка нажимает на поверхность, которая должна быть очищена.
[0013] Аспектом настоящего раскрытия является предоставление чистящего блока, имеющего конструкцию, приспособленную для толкания или потягивания одной стороны вала, чтобы предоставлять возможность валу перемешивателя перемещаться горизонтально, когда перемешиватель вращается.
Решение проблемы
[0014] Для того, чтобы добиться целей настоящего раскрытия, настоящее раскрытие предоставляет чистящий блок, включающий в себя столбчатую корпусную часть, в которой размещается отверстие для направления вращения на его внешней периферийной поверхности; вал, предусмотренный, чтобы выполнять возвратно-поступательное движение на предварительно определенное расстояние в продольном направлении в полости, размещенной в корпусной части; приводящий участок, выступающий из вала в радиальном направлении; щеточный участок, имеющий одну сторону, предусмотренную на внешней периферийной поверхности корпусной части в продольном направлении, чтобы вращаться с одной стороной в качестве своей оси вращения; и приводимый участок, протягивающийся от щеточного участка по направлению к приводящему участку, чтобы вставляться в паз для направления вращения, размещенный в приводящем участке через отверстие для направления вращения, при этом паз для направления вращения протягивается под предварительно определенным углом относительно продольного направления вала, и при этом, когда вал выполняет возвратно-поступательное движение, приводимый участок направляется во вращение посредством паза для направления вращения, и щеточный участок вращается посредством вращения приводимого участка.
[0015] Кроме того, щеточный участок и приводимый участок, протягивающийся от щеточного участка, могут быть размещены во множественном числе в корпусной части в круговом направлении, и паз для направления вращения может быть размещен во множественном числе на приводящем участке в круговом направлении.
[0016] Кроме того, приводящий участок может быть размещен во множественном числе в продольном направлении на валу, и приводимый участок может быть размещен во множественном участке в продольном направлении щеточного участка.
[0017] Кроме того, расстояние между валом и другим концом щеточного участка может становиться минимальным, когда вал максимально перемещается по направлению к первой стороне корпусной части, и становится максимальным, когда вал максимально перемещается по направлению к другой стороне, противоположной первой стороне.
[0018] Кроме того, чистящий участок может дополнительно включать в себя закрепленный щеточный участок, протягивающийся радиально наружу от внешней периферийной поверхности корпусной части, расстояние между валом и другим концом щеточного участка может быть разнесено на первый радиус поворота, который является минимальным значением, когда вал максимально перемещается по направлению к первой стороне корпусной части, и может быть разнесено на второй радиус поворота, который является максимальным значением, когда вал максимально перемещается по направлению к другой стороне, противоположной первой стороне, и расстояние между валом и крайним участком с радиально внешней стороны закрепленного щеточного участка может быть больше первого радиуса вращения и может быть меньше второго радиуса вращения.
[0019] Кроме того, щеточный участок может включать в себя первую щетку и вторую щетку, соответственно протягивающиеся от одной стороны щеточного участка в радиально внешнюю сторону корпусной части, при этом первая щетка и вторая щетка формируют предварительно определенный угол друг с другом, и длины в направлении протяжения, в котором первая щетка и вторая щетка размещаются, должны отличаться друг от друга.
[0020] Кроме того, корпусная часть может включать в себя полый корпусной элемент, размещенный с утопленным пазом, в котором щеточный участок предусматривается на его внешней периферийной поверхности, оба конца которого являются открытыми; и первую концевую крышку и вторую концевую крышку, соответственно установленные на оба конца корпусного элемента, чтобы закрывать оба конца, соответственно.
[0021] Кроме того, одна сторона щеточного участка может быть размещена в утопленном пазу, вращающиеся выступы могут быть размещены на обоих концах первой стороны щеточного участка в продольном направлении, и первая концевая крышка и вторая концевая крышка могут быть снабжены приемными отверстиями, соединенными с возможностью вращения с вращающимися выступами.
[0022] Кроме того, вал может включать в себя шип для передачи мощности, проходящий сквозь одну сторону вала, и первая концевая крышка может включать в себя участок для направления вала, присоединенный с возможностью скольжения к одной стороне вала.
[0023] Кроме того, отверстие для направления вала, присоединенное с возможностью скольжения к валу, может быть размещено во второй концевой крышке, и вал может включать в себя E-образное кольцо, выступающее в радиальном направлении, и E-образное кольцо может быть размещено во множественном числе со второй концевой крышкой, вставленной между ними, чтобы ограничивать расстояние возвратно-поступательного перемещения вала.
[0024] Кроме того, чистящий блок может дополнительно включать в себя участок для приема вала, установленный на другой стороне вала, при этом подшипник вставляется между участком для приема вала и валом, и E-образное кольцо размещается во множественном числе с участком для приема вала между ними, чтобы закреплять участок для приема вала в продольном направлении.
[0025] Кроме того, чистящий блок может дополнительно включать в себя первый силовой модуль, присоединенный к первой концевой крышке, чтобы вращать вал; второй силовой модуль, соединенный с участком для приема вала, чтобы толкать и тянуть участок для приема вала согласно операционной информации; датчик, присоединенный к первому силовому модулю и сконфигурированный, чтобы обнаруживать значение тока первого силового модуля; и контроллер, который вычисляет операционную информацию, который электрически соединяется со вторым силовым модулем, чтобы передавать вычисленную операционную информацию второму силовому модулю, и электрически соединенный с датчиком, чтобы принимать значение тока первого силового модуля, которое обнаружено в датчике, при этом контроллер вычисляет операционную информацию с помощью обнаруженного значения тока первого силового модуля.
[0026] Кроме того, операционная информация может включать в себя первую операционную информацию и вторую операционную информацию, при этом второй силовой модуль принимает первую операционную информацию, чтобы толкать участок для приема вала с предварительно определенным давлением, и принимает вторую операционную информацию, чтобы тянуть участок для приема вала с предварительно определенным давлением, и контроллер вычисляет первую операционную информацию, когда обнаруженное значение тока первого силового модуля больше или равно первому значению, и вычисляет вторую операционную информацию, когда обнаруженное значение тока первого силового модуля меньше первого значения.
[0027] Кроме того, для того, чтобы добиваться целей настоящего раскрытия изобретения, настоящее раскрытие предоставляет чистящий блок, включающий в себя столбчатую корпусную часть, в которой отверстие для направления вращения размещается на её внешней периферийной поверхности; вал, предусмотренный для возвратно-поступательного перемещения на предварительно определенное расстояние в продольном направлении в полости, размещенной в упомянутом корпусе; приводящий участок, выступающий из вала в радиальном направлении и имеющий внешнюю периферийную поверхность, наклоненную радиально наружу в продольном направлении; щеточный участок, имеющий первую сторону, предусмотренную на внешней периферийной поверхности корпусной части в продольном направлении, чтобы вращаться с первой стороной в качестве своей оси вращения; и приводимый участок, протягивающийся от щеточного участка в корпусную часть через отверстие для направления вращения, при этом приводимый участок имеет наклоненный участок, контактирующий с внешней периферийной поверхностью, и когда вал выполняет возвратно-поступательное перемещение, приводимый участок вращается посредством внешней периферийной поверхности, и щеточный участок вращается посредством вращения приводимого участка.
[0028] Кроме того, щеточный участок и приводимый участок, протягивающийся от щеточного участка, могут быть размещены во множественном числе в круговом направлении корпусной части.
[0029] Кроме того, приводящий участок может быть размещен во множественном числе в продольном направлении на валу, и приводимый участок может быть размещен во множественном участке в продольном направлении щеточного участка.
[0030] Кроме того, расстояние между валом и другим концом щеточного участка может становиться минимальным, когда вал максимально перемещается по направлению к первой стороне корпусной части, и становится максимальным, когда вал максимально перемещается по направлению к другой стороне, противоположной первой стороне.
Полезные результаты изобретения
[0031] Согласно настоящему раскрытию могут быть получены следующие результаты.
[0032] Во-первых, в настоящем раскрытии, кулачковая конструкция, которая преобразует продольное движение вала во вращательное движение щеточного участка, может быть использована, тем самым, изменяя радиус вращения щеточного участка согласно окружающей обстановке пола. Посредством этого, даже когда пылесос находится на расстоянии от поверхности, как, например, в окружающей обстановке ковра, радиус вращения щетки может быть расширен, чтобы нажимать на поверхность. Т.е., характеристика очистки пылесоса может поддерживаться в различных окружающих обстановках пола.
[0033] Кроме того, пользователь может легко изменять радиус вращения щетки, не прикасаясь к пыли рукой в процессе изменения радиуса вращения щетки. Посредством этого пользователь может очищать различные окружающие обстановки пола, в то же время поддерживая чистоту.
[0034] Кроме того, подшипник может быть предусмотрен между участком для приема вала и валом, тем самым, толкая или потягивая вал, в то время как перемешиватель вращается. Посредством этого радиус вращения щеточного участка может быть расширен или уменьшен.
[0035] Кроме того, закрепленный щеточный участок может быть размещен между вращающимися щеточными участками, тем самым, всегда применяя нажатие с надлежащим давлением к поверхности, которая должна быть очищена.
[0036] Кроме того, щеточный участок может включать в себя первую щетку и вторую щетку, наклоненные на предварительно определенный угол друг к другу, при этом первая щетка и вторая щетка размещаются, чтобы иметь различные длины, тем самым, всегда применяя нажатие с надлежащим давлением к поверхности, которая должна быть очищена.
[0037] Кроме того, радиус вращения щеточного участка автоматически регулируется, чтобы расширяться согласно значению тока, протекающего через первый силовой модуль, который вращает перемешиватель. Посредством этого, когда пылесос автоматически управляется, радиус вращения щеточного участка может быть отрегулирован, чтобы расширяться в окружающей обстановке ковра.
Краткое описание чертежей
[0038] Фиг. 1 является видом в перспективе, иллюстрирующим робот-пылесос предшествующего уровня техники.
[0039] Фиг. 2 является видом сбоку робота-пылесоса, иллюстрированного на фиг. 1.
[0040] Фиг. 3 является видом в перспективе, иллюстрирующим перемешиватель согласно варианту осуществления настоящего раскрытия.
[0041] Фиг. 4 является покомпонентным видом перемешивателя, иллюстрированного на фиг. 3.
[0042] Фиг. 5A является видом в перспективе вала, иллюстрированного на фиг. 4.
[0043] Фиг. 5B является видом в перспективе, иллюстрирующим состояние, в котором шип и E-образное кольцо присоединены к валу, иллюстрированному на фиг. 5A.
[0044] Фиг. 5C является видом в перспективе, иллюстрирующим состояние, в котором приводящий участок присоединяется к валу, иллюстрированному на фиг. 5B.
[0045] Фиг. 6 является видом в перспективе, иллюстрирующим вторую концевую крышку, иллюстрированную на фиг. 4.
[0046] Фиг. 7 является видом в перспективе, иллюстрирующим корпусной элемент, иллюстрированный на фиг. 4.
[0047] Фиг. 8 является видом в перспективе, иллюстрирующим держатель щетки, иллюстрированный на фиг. 4.
[0048] Фиг. 9 является видом в перспективе, иллюстрирующим участок для приема вала, иллюстрированный на фиг. 4.
[0049] Фиг. 10A является видом в перспективе, иллюстрирующим состояние, прежде чем щеточный участок перемешивателя, иллюстрированный на фиг. 3, расширяется.
[0050] Фиг. 10B является видом в перспективе, иллюстрирующим состояние, в котором щеточный участок перемешивателя, иллюстрированный на фиг. 3, расширяется.
[0051] Фиг. 10C является видом сбоку, иллюстрирующим рабочее состояние щеточного участка перемешивателя, иллюстрированного на фиг. 3.
[0052] Фиг. 11 является видом сбоку, иллюстрирующим модифицированный пример перемешивателя, иллюстрированного на фиг. 3.
[0053] Фиг. 12 является видом сбоку, иллюстрирующим другой модифицированный пример перемешивателя, иллюстрированного на фиг. 3.
[0054] Фиг. 13A является частичным видом в перспективе, иллюстрирующим еще один модифицированный пример перемешивателя, иллюстрированного на фиг. 3.
[0055] Фиг. 13B является частичным видом в перспективе, иллюстрирующим состояние, в котором щеточный участок перемешивателя, иллюстрированного на фиг. 13A, расширяется.
[0056] Фиг. 13C является видом сбоку, иллюстрирующим рабочее состояние еще одного модифицированного примера перемешивателя, иллюстрированного на фиг. 3.
[0057] Фиг. 14 является блок-схемой, иллюстрирующей конфигурацию для управления чистящим блоком согласно настоящему раскрытию.
[0058] Фиг. 15 является блок-схемой последовательности операций, иллюстрирующей последовательность операций способа управления чистящим блоком согласно настоящему раскрытию.
[0059] Фиг. 16 является блок-схемой последовательности операций, иллюстрирующей вариант осуществления этапа S20 на фиг. 15.
Режим осуществления изобретения
[0060] Сначала, перед описанием перемешивателя согласно настоящему раскрытию, будет описан пылесос предшествующего уровня техники, к которому перемешиватель может быть присоединен.
[0061] Фиг. 1 является видом в перспективе, иллюстрирующим пример пылесоса на предшествующем уровне техники, а фиг. 2 является видом сбоку пылесоса, иллюстрированного на фиг. 1.
[0062] Робот-пылесос 100 может быть сконфигурирован для выполнения функции полировки пола, также как функции всасывания пыли на полу. Для этого робот-пылесос 100 включает в себя корпус 110 пылесоса и модуль 120 всасывающего сопла.
[0063] Корпус 110 пылесоса и модуль 120 всасывающего сопла определяют внешний вид робота-пылесоса 100. Различные части, включающие в себя контроллер (не показан) для управления роботом-пылесосом 100, встроены или установлены в роботе-пылесосе 100. Кроме того, различные части для очистки области, которая должна быть очищена, устанавливаются в модуле 120 всасывающего сопла.
[0064] Внешний вид корпуса 110 пылесоса определяется внешней крышкой 111 и базовым корпусом 112 основания.
[0065] Внешняя крышка 111 и базовый корпус 112 присоединяются друг к другу, чтобы определять внешний вид основной части 110 пылесоса. Базовый корпус 112 определяет нижний участок корпуса 110 пылесоса и конфигурируется, чтобы размещать компоненты робота-пылесоса 100. Кроме того, внешняя крышка 111 присоединяется к верхнему участку базового корпуса 112.
[0066] Корпус 110 пылесоса снабжен колесами 160, 160' для привода робота-пылесоса 100. Колеса 160, 160' могут быть предусмотрены в нижнем участке корпуса 110 пылесоса или модуля 120 всасывающего сопла. Робот-пылесос 100 может двигаться или вращаться взад и вперед, влево и вправо посредством колес 160, 160'.
[0067] Например, когда робот-пылесос 100 имеет функцию автономного привода, колеса 160, 160' могут быть сконфигурированы как колесный модуль 160, который вращается, принимая приводящее усилие от приводного мотора. В качестве другого примера, когда корпус 110 пылесоса перемещается посредством пользовательской манипуляции, колеса 160, 160' могут быть сконфигурированы, чтобы иметь только функцию качения относительно типичного пола.
[0068] Вспомогательное колесо 160' может быть дополнительно предусмотрено в корпусе 110 пылесоса. Вспомогательное колесо 160' поддерживает корпус 110 пылесоса вместе с колесным модулем 160 и может быть сконфигурирован, чтобы предоставлять возможность пассивного вращения. Вспомогательное колесо 160' конфигурируется, чтобы поддерживать привод робота-пылесоса 100 посредством колесного модуля 160.
[0069] Контейнер 170 для пыли устанавливается в задней части корпуса 110 пылесоса. Корпус 110 пылесоса может иметь частично углубленную форму, чтобы размещать контейнер 170 для пыли, в то же время поддерживая круглый внешний вид. Контейнер 170 для пыли может включать в себя, по меньшей мере, один из фильтра и циклонного пылеуловителя для фильтрации пыли и посторонних веществ во всасываемом воздухе.
[0070] Робот-пылесос 100 может включать в себя крышку 171 контейнера для пыли, закрывающую контейнер 170 для пыли. В состоянии, в котором крышка 171 контейнера для пыли размещается, чтобы закрывать верхнюю поверхность контейнера 170 для пыли, крышка 171 контейнера для пыли может ограничивать контейнер для пыли. Соответственно, крышка 171 контейнера для пыли может предохранять контейнер 170 для пыли от произвольного отделения от корпуса 110 пылесоса.
[0071] Фиг. 2 иллюстрирует то, что крышка 171 контейнера для пыли шарнирно присоединяется к корпусу 110 пылесоса поворачиваемым образом. Крышка 171 контейнера для пыли может быть прикреплена к контейнеру 170 для пыли или корпусу 110 пылесоса, чтобы поддерживать состояние закрывания верхней поверхности контейнера 170 для пыли.
[0072] Когда робот-пылесос 100 имеет функцию автономного привода аналогично роботу-пылесосу, блок 118 обнаружения для обнаружения окружающей ситуации может быть предусмотрен в корпусе 110 пылесоса. Контроллер, сконфигурированный с главной платой печатного монтажа (не показана), может обнаруживать препятствие, обнаруживать ориентир местности или электронно формировать карту области движения посредством блока 118 обнаружения.
[0073] Модуль 120 всасывающего сопла присоединяется к передней стороне корпуса 110 пылесоса в выступающей форме. Внешний вид модуля 120 всасывающего сопла определяется корпусом 121 для установки модуля, и участок 121a для установки перемешивателя размещается на внутренней стороне корпуса 121 для установки модуля. Перемешиватель 200 съемным образом устанавливается на участок 121a для установки перемешивателя.
[0074] Бамперный переключатель 122, который обнаруживает физическое столкновение, может быть предусмотрен на внешней стороне модуля 120 всасывающего сопла.
[0075] На этом чертеже показано, что бамперный переключатель 122 предусматривается в модуле 120 всасывающего сопла. Бамперный переключатель 122 может быть размещен на передней стороне модуля 120 всасывающего сопла, а в некоторых случаях, может быть размещен на обеих боковых сторонах, также как и на его передней стороне, как иллюстрировано.
[0076] Как иллюстрировано, когда модуль 120 всасывающего сопла размещается в форме, выступающей из корпуса 110 пылесоса, вышеописанное вспомогательное колесо 160' для устойчивого привода робота-пылесоса 100, может также быть предусмотрено на нижней стороне модуля 120 всасывающего сопла.
[0077] Перемешиватель 200, съемным образом установленный на участок 121a для установки перемешивателя, конфигурируется, чтобы очищать область, которая должна быть очищена. Пыль и посторонние вещества в воздухе, всасываемом через перемешиватель 200, отделяются из воздуха посредством фильтра или циклонного пылеуловителя, предусмотренного в корпусе пылесоса или контейнере для пыли, и собираются в контейнере 170 для пыли. Кроме того, воздух, отделенный от пыли и посторонних веществ, выпускается наружу из корпуса 110 пылесоса. Впускной канал (не показан), который направляет поток воздуха от участка 121a для установки перемешивателя в контейнер 170 для пыли, может быть размещен внутри корпуса 110 пылесоса. Кроме того, выпускной канал (не показан), который направляет поток воздуха из контейнера 170 для пыли наружу из корпуса 110 пылесоса, моет быть размещен внутри корпуса 110 пылесоса.
[0078] Пылесос, иллюстрированный на фиг. 1 и 2, иллюстрирует позицию, в которой перемешиватель 200, 300 согласно настоящему раскрытию предусматривается, и кратко описывается пылесос предшествующего уровня техники, в котором перемешиватель 200, 300 присоединяется к нему для работы. Перемешиватель 200, 300 согласно настоящему раскрытию может быть применен не только в автоматически управляемом роботе-пылесосе, но также в пылесосе, которым непосредственно манипулирует пользователь.
[0079] Далее в данном документе, чистящий блок, имеющий перемешиватель, приспособленный для изменения длины щетки согласно настоящему раскрытию, будет описан.
[0080] В последующем описании описание некоторых компонентов будет пропущено, чтобы прояснять отличительные признаки настоящего раскрытия.
[0081] Фиг. 3 является видом в перспективе, иллюстрирующим вариант осуществления перемешивателя согласно варианту осуществления настоящего раскрытия.
[0082] Перед описанием конфигурации перемешивателя 200 согласно настоящему раскрытию будут определены направления, используемые ниже.
[0083] Термин "продольное направление", используемый ниже, обозначает осевое направление вала 220 (см. фиг. 4), который должен быть описан позже. Т.е., "продольное направление" обозначает направление от первой концевой крышки 250 ко второй концевой крышке 260 и направление от второй концевой крышки 260 к первой концевой крышке 250.
[0084] Кроме того, термин "радиальное направление", используемый ниже, обозначает направление с кратчайшим расстоянием от какой-либо одной точки на центральной оси, по которой протягивается вал 220 (см. фиг. 4), до какой-либо одной точи на внешней периферийной поверхности корпусного элемента 210, размещенного на плоскости, перпендикулярной центральной оси, которая должна быть описана позже.
[0085] Кроме того, термин "круговое направление", используемое ниже, обозначает направление вращения, когда воображаемая линия, перпендикулярная центральной оси вала 220 (см. фиг. 4), которая должна быть описана позже, вращается вдоль центральной оси.
[0086] Кроме того, термин "передний (F)", используемый ниже обозначает направление, в котором вал 220 (см. фиг. 4) перемещается, когда щеточный участок 230 расширяется. Т.е., он обозначает направление, в котором вал 220 приближается к первой концевой крышке 250.
[0087] Кроме того, термин "задний (R)", используемый ниже, обозначает направление, в котором вал 220 (см. фиг. 4) перемещается, когда щеточный участок 230 возвращается. Т.е., он обозначает направление, в котором вал 220 перемещается от первой концевой крышки 250.
[0088] Обращаясь к фиг. 3, перемешиватель 200 настоящего раскрытия включает в себя корпусную часть 205, вал 220 (см. фиг. 4), щеточный участок 230 и участок 270 для приема вала.
[0089] Корпусная часть 205 включает в себя корпусной элемент 210, первую концевую крышку 250 и вторую концевую крышку 260.
[0090] Корпусной элемент 210 может быть определен в полой форме с обеими открытыми сторонами. Вал 220 (см. фиг. 4), который должен быть описан позже, вставляется в полость корпусного элемента 210 в продольном направлении. Первая концевая крышка 250 и вторая концевая крышка 260 соответственно вставляются и присоединяются к обоим открытым концам корпусного элемента.
[0091] Обе стороны вала 220 (см. фиг. 4) присоединяются с возможностью скольжения к первой концевой крышке 250 и второй концевой крышке 260 в продольном направлении. Посредством этого вал 220 (см. фиг. 4) может выполнять возвратно-поступательные движения в продольном направлении в корпусной части 205. В этом отношении это будет описано подробно позже.
[0092] Другими словами, первая концевая крышка 250 размещает переднюю сторону вала 220 (см. фиг. 4). Кроме того, в то же самое время, первая концевая крышка 250 устанавливается на концевой участок передней стороны корпусного элемента 210, чтобы закрывать вал.
[0093] Вторая концевая крышка 260 размещает заднюю сторону вала 220. Кроме того, в то же самое время, вторая концевая крышка 260 устанавливается на концевой участок задней стороны корпусного элемента 210, чтобы закрывать вал.
[0094] Другая сторона вала 220 присоединяется к участку 270 для приема вала, проходя через вторую концевую крышку 260.
[0095] Утопленный паз 211 размещается утопленным на предварительно определенную длину в продольном направлении на внешней периферийной поверхности корпусного элемента 210. Щеточный участок 230 предусматривается в утопленном пазу 211 в продольном направлении.
[0096] Щеточный участок 230 вращается с одной своей стороной, размещенной в утопленном пазу 211, в качестве оси вращения. В этом отношении это будет описано подробно позже.
[0097] Вращающиеся выступы 2322 выступают из обоих крайних участков одной стороны, размещенной в утопленном пазу 211. Приемные отверстия 251a, 261a, присоединенные с возможностью вращения к вращающемуся выступу 2322, размещаются в первой концевой крышке 250 и второй концевой крышке 260, соответственно.
[0098] Щеточный участок 230 присоединяется к корпусному элементу 210 через вышеописанную соединительную конструкцию. Кроме того, щеточный участок 230 может вращаться посредством вышеописанной соединительной конструкции.
[0099] Фиг. 4 является покомпонентным видом перемешивателя, иллюстрированного на фиг. 3.
[0100] Со ссылкой на фиг. 4, корпусной элемент 210, вал 220, щеточный участок 230, блок 240 передачи мощности, первая концевая крышка 250 и вторая концевая крышка 260 и участок 270 для приема вала согласно варианту осуществления настоящего раскрытия будут описаны.
[0101] Сначала будет описан корпусной элемент 210 согласно настоящему раскрытию.
[0102] Корпусной элемент 210 размещается в полой форме с открытыми обоими концами. Одна сторона щеточного участка 230 может быть предусмотрена на внешней периферийной поверхности корпусного элемента 210 в продольном направлении.
[0103] Утопленный паз 211 может быть размещен на внешней периферийной поверхности корпусного элемента 210 в продольном направлении.
[0104] Утопленный паз 211 может быть размещен утопленным в продольном направлении от внешней периферийной поверхности корпусного элемента 210. Участок, снабженный одной стороной щеточного участка 230, размещается утопленным на участке, снабженном щеточным участком 230.
[0105] Утопленный паз 211 предоставляет пространство, в котором одна сторона щеточного участка 230 может вращаться.
[0106] Множество утопленных пазов 211 могут быть размещены в круговом направлении. Например, в случае, когда размещаются три щеточных участка 230, три утопленных паза 211 также размещаются, чтобы вмещать щеточные участки 230, соответственно.
[0107] Отверстие 213 для направления вращения размещается в утопленном пазу 211.
[0108] Соединительное соотношение с другими компонентами корпусного элемента 210 является следующим.
[0109] Вал 220 вставляется в полость корпусного элемента 210 в продольном направлении. Затем, щеточный участок 230 предоставляется в утопленном пазу 211 корпусного элемента 210. Кроме того, первая концевая крышка 250 и вторая концевая крышка 260 соответственно устанавливаются и вставляются в оба открытых конца корпусного элемента 210.
[0110] Далее, будет описан вал 220 согласно настоящему раскрытию.
[0111] Вал 220 размещается в полости корпусного элемента 210 в продольном направлении. Обе стороны вала 220 присоединяются с возможностью скольжения к первой и второй концевым крышкам 250, 260, соответственно, в продольном направлении. Посредством этого вал 220 может выполнять возвратно-поступательные движения в продольном направлении в корпусном элементе 210.
[0112] Приводящий участок 223 протягивается в радиальном направлении на внешней периферийной поверхности вала 220. Приводящий участок 223 присоединяется к внешней периферийной поверхности вала 220. Кроме того, вал 220 и приводящий участок 223 могут быть объединены в единый корпус.
[0113] Приводящий участок 223 может быть определен в многоугольной столбчатой форме. Паз 2233 для направления вращения размещается на радиально внешней стороне приводящего участка 223. Паз 2233 для направления вращения протягивается под предварительно определенным углом относительно продольного направления вала 220.
[0114] Приводимый участок 2323, который должен быть описан позже, вставляется в паз 2233 для направления вращения. Когда вал 220 выполняет возвратно-поступательные движения в продольном направлении вместе с приводящим участком 223, приводимый участок 2323 направляется в паз 2233 для направления вращения. Посредством этого приводимый участок 2323 вращается с одной стороной щеточного участка 230 в качестве оси вращения. В этом отношении это будет описано подробно позже.
[0115] Паз 2233 для направления вращения может быть размещен во множественном числе на радиально внешней стороне приводящего участка 223 в круговом направлении. Приводимый участок 2323, вставленный в паз 2233 для направления вращения, может также быть размещен во множественном числе в круговом направлении вала 220. Т.е., щеточный участок 230 может быть размещен во множественном числе в круговом направлении.
[0116] Кроме того, приводящий участок 223 может быть размещен во множественном числе в продольном направлении вала 220. Приводимый участок 2323, вставленный в паз 2233 для направления вращения, может также быть размещен во множественном числе в продольном направлении вала 220. Т.е., приводимый участок 2323 может быть размещен во множественном числе на щеточном участке 230 в продольном направлении.
[0117] Крайний участок передней стороны вала 220 присоединяется с возможностью скольжения к первой концевой крышке 250. Задняя сторона вала 220 присоединяется ко второй концевой крышке 260, проходя насквозь. Т.е., вал 220 проходит через вторую концевую крышку 260 и протягивается к ее задней стороне и вставляется с возможностью скольжения в отверстие 261b для приема вала второй концевой крышки 260.
[0118] Крайний участок задней стороны вала 220 присоединяется к участку 270 для приема вала.
[0119] На этом чертеже, в то время как вал 220 иллюстрируется в цилиндрической форме, вал 220 может также быть определен в многоугольной столбчатой форме.
[0120] Здесь, многоугольная столбчатая форма не обязательно включает в себя только форму, созданную из прямой линии, но форму, объединенную с прямой линией и кривой, и может включать в себя все другие формы, отличные от цилиндрической формы.
[0121] Однако, для того, чтобы эффективно вращать вал 220, ось вращения и центр массы вала 220 предпочтительно определяются совпадающими друг с другом.
[0122] Кроме того, вал 220 может включать в себя множество шипов 2202 и E-образное кольцо 2205. Шип 2202 проходит сквозь вал 220 в направлении, пересекающем продольное направление вала 220. E-образное кольцо 2205 конфигурируется с кольцевым участком хомута, который является частично открытым, и зубчатым участком, протягивающимся радиально внутрь от участка хомута.
[0123] Тонкий паз, утопленный в круговом направлении, формируется в валу 220. В пазу E-образное кольцо 2205 вставляется в паз через его открытый участок.
[0124] Шип 2202 и E-образное кольцо 2205 ограничивает расстояние возвратно-поступательного перемещения вала 220. Кроме того, шип 2202 и E-образное кольцо 2205 фиксируют приводящий участок 223 и участок 270 для приема вала, присоединенный к валу 220 в продольном направлении. В этом отношении это будет описано подробно позже.
[0125] Далее, будет описан щеточный участок 230 согласно варианту осуществления настоящего раскрытия.
[0126] Щеточный участок 230 предусматривается на внешней периферийной поверхности корпусного элемента 210 в продольном направлении. Утопленный паз 211 корпусного элемента 210, снабженный щеточным участком 230, размещается утопленным от внешней периферийной поверхности.
[0127] Щеточный участок 230 включает в себя держатель 232 щетки и щетку 231, вставленную в держатель 232 щетки. В варианте осуществления настоящего раскрытия щетка 231 и держатель 232 щетки могут быть размещены имеющими одинаковую длину в продольном направлении. Кроме того, держатель 232 щетки может быть размещен имеющим практически такую же длину, что и корпусной элемент 210 в продольном направлении.
[0128] Щетка 231 протягивается в продольном направлении. Щетка 231 может быть в форме пучка из множества щеток или в форме резиновой пластины. Щетка 231 ударяет поверхность, которая должна быть очищена, в то же время вращаясь вместе с валом 220 в качестве оси вращения. Посредством этого может быть возможно сгонять или захватывать пыль или посторонние вещества, размещенные на поверхности, которая должна быть очищена.
[0129] Держатель 232 щетки протягивается в продольном направлении. Паз, в который щетка 231 вставляется, размещается на одной стороне держателя 232 щетки, и приводимый участок 2323 размещается на другой стороне, противоположной первой стороне.
[0130] Приводимый участок 2323 протягивается по направлению к приводящему участку 223. Крайний участок приводимого участка 2323 вставляется в приводящий участок 223. Крайний участок может быть определен в сферической форме. Однако, он необязательно ограничивается сферической формой и может быть любой формы, которая может быть вставлена в и зацеплена с пазом 2233 для направления вращения приводящего участка 223.
[0131] Вращающиеся выступы 2322 протягиваются на обоих крайних участках держателя 232 щетки в продольном направлении. Отверстия 251a, 261a для приема вращающегося выступа размещаются на первой концевой пластине 251 и второй концевой пластине 261. Вращающийся выступ 2322 присоединяется с возможностью вращения к отверстиям 251a, 261a для прием вращающегося выступа.
[0132] Щеточный участок 230 присоединяется к корпусному элементу 210 через соединительную конструкцию. Щеточный участок 230 вращается с одной стороной, размещенной с отверстиями 251a, 261a для приема вращающегося выступа в качестве оси вращения.
[0133] Другими словами, держатель 232 щетки вращается относительно оси, проходящей через вращающиеся выступы 2322, размещенные на обоих его крайних участках. Щетка 231 вставляется в одну сторону держателя 232 щетки, и щетка 231 вращается относительно оси, проходящей через вращающийся выступ 2322. Кроме того, приводимый участок 2323, размещенный на другой стороне держателя 232 щетки, также вращается относительно оси, проходящей через вращающийся выступ 2322.
[0134] Т.е., щетка 231 и приводимый участок 2323 вращаются относительно оси, проходящей через вращающийся выступ 2322.
[0135] Когда вал 220 выполняет возвратно-поступательные движения, приводимый участок 2323 направляется во вращение посредством паза 2233 для направления вращения, и щетка 231 вращается посредством вращения приводимого участка 2323. В этом отношении это будет описано подробно позже.
[0136] [0137] Далее, будет описана первая концевая крышка 250 согласно варианту осуществления настоящего раскрытия.
[0138] Первая концевая крышка 250 включает в себя первую концевую пластину 251. Первая концевая пластина 251 определяется в форме круглой пластины. Участок 252 передачи мощности выступает из передней стороны первой концевой пластины 251, и первый установочный участок 253 размещается на ее задней стороне.
[0139] Первый установочный участок 253 размещается в круговом направлении, чтобы зацепляться с внутренней периферийной поверхностью корпусного элемента 210. Кроме того, первый соединительный участок 254, имеющий силу упругости, выступает из задней стороны первой концевой пластины 251.
[0140] Когда первая концевая крышка 250 вставляется в корпусной элемент 210, крайний участок первого соединительного выступа 254 улавливается в соединительное отверстие 215 концевой крышки, размещенное на внешней периферийной поверхности корпусного элемента 210. Посредством этого, первая концевая крышка 250 присоединяется к одному крайнему участку корпусного элемента 210, чтобы покрывать корпусного элемент 210.
[0141] Участок 252 передачи мощности присоединяется к первому силовому модулю. Сила вращения первого силового модуля передается перемешивателю 200 посредством участка 252 передачи мощности.
[0142] Далее, будет описана вторая концевая крышка 260 согласно варианту осуществления настоящего раскрытия.
[0143] Вторая концевая крышка 260 включает в себя вторую концевую пластину 261. Вторая концевая пластина 261 определяется в форме круглой пластины. Второй установочный участок 263 размещается на передней стороне второй концевой пластины 261.
[0144] Второй установочный участок 263 размещается в круговом направлении, чтобы зацепляться с внутренней периферийной поверхностью корпусного элемента 210. Кроме того, второй соединительный выступ 264, имеющий силу упругости, выступает из передней стороны второй концевой пластины 261.
[0145] Когда вторая концевая крышка 260 вставляется в корпусной элемент 210, крайний участок второго соединительного выступа 264 улавливается в соединительное отверстие 215 концевой крышки, размещенное на внешней периферийной поверхности корпусного элемента 210. Посредством этого вторая концевая крышка 260 присоединяется к заднему крайнему участку корпусного элемента 210, чтобы покрывать корпусной элемент 210.
[0146] Отверстие 261b для приема вала размещается в центре второй концевой пластины 261, проходя сквозь нее. Задняя сторона вала 220 присоединяется с возможностью скольжения к отверстию 261b для приема вала. Т.е., отверстие 261b для приема вала направляет продольное перемещение вала 220.
[0147] Далее, будет описан участок 270 для приема вала согласно варианту осуществления настоящего раскрытия.
[0148] Участок 270 для приема вала присоединяется к заднему крайнему участку вала 220.
[0149] Участок 270b для приема подшипника, утопленный на предварительно определенную длину от передней стороны по направлению к задней стороне, размещается в участке 270 для приема вала. Кроме того, отверстие 270a для присоединения вала размещается на задней стороне участка 270b для приема подшипника, проходя сквозь него.
[0150] Задний крайний участок вала 220 присоединяется с возможностью вращения к отверстию 270a для присоединения вала. Кроме того, задний крайний участок вала 220 размещается в участке 270b для приема подшипника. Здесь, подшипник 271 вставляется между задним крайним участком вала 220 и участком 270b для приема подшипника. В варианте осуществления настоящего раскрытия шариковый подшипник или т.п. может быть использован для подшипника 271. Когда вал 220 вращается вместе с внутренним кольцом подшипника 271, вал 220 вращается в участке 270 для приема вала.
[0151] Участок 270 для приема вала позиционируется между множеством E-образных колец 2205, выступающих из внешней периферийной поверхности вала 220. Посредством этого участок 270 для приема вала закрепляется в продольном направлении на валу 220.
[0152] Задняя сторона участка 270 для приема вала присоединяется ко второму силовому модулю. Второй силовой модуль толкает участок 270 для приема вала в переднюю сторону или тянет участок 270 для приема вала в заднюю сторону. Т.е., возвратно-поступательное перемещение вала 220 управляется.
[0153] Далее в данном документе, со ссылкой на фиг. 5A, 5B и 5C, вал 220 согласно варианту осуществления настоящего раскрытия будет описан подробно.
[0154] Фиг. 5A является видом в перспективе вала, иллюстрированного на фиг. 4.
[0155] Вал 220 определяется в длинной цилиндрической форме. Кроме того, отверстие 2201 для приема шипа и паз 2204 для приема E-образного кольца размещаются на валу 220.
[0156] Отверстие 2201 для приема шипа проходит через вал 220 в направлении, пересекающем продольное направление вала 220. Отверстие 2201 для приема шипа может быть размещено во множественном числе в продольном направлении. В варианте осуществления настоящего раскрытия первое отверстие 2201a для приема шипа, второе отверстие 2201b для приема шипа и третье отверстие 2201c для приема шипа последовательно размещаются в продольном направлении.
[0157] Паз 2204 для приема E-образного кольца является утопленным в круговом направлении на внешней периферийной поверхности вала 220. Паз 2204 для приема E-образного кольца может быть размещен во множественном числе в продольном направлении. В варианте осуществления настоящего раскрытия первый паз 2204a для приема E-образного кольца, второй паз 2204b для приема E-образного кольца, третий паз 2204c для приема E-образного кольца, четвертый паз 2204d для приема E-образного кольца, пятый паз 2204e для приема E-образного кольца и шестой паз 2204f для приема E-образного кольца последовательно размещаются в продольном направлении.
[0158] Фиг. 5B является видом в перспективе, иллюстрирующим состояние, в котором шип и E-образное кольцо присоединены к валу, иллюстрированному на фиг. 5A.
[0159] Первый шип 2202a, второй шип 2202b и третий шип 2202c последовательно вставляется в первое отверстие 2201a для приема шипа, второе отверстие 2201b для приема шипа и третье отверстие 2201c для приема шипа. В присоединенном состоянии оба крайних участка каждого шипа 2202 выступают из обоих крайних участков приемного отверстия 2201.
[0160] Первое E-образное кольцо 2205a, второе E-образное кольцо 2205b, третье E-образное кольцо 2205c, четвертое E-образное кольцо 2205d, пятое E-образное кольцо 2205e и шестое E-образное кольцо 2205f присоединяются к первому пазу 2204a для приема E-образного кольца, второму пазу 2204b для приема E-образного кольца, третьему пазу 2204c для приема E-образного кольца, четвертому пазу 2204d для приема E-образного кольца, пятому пазу 2204e для приема E-образного кольца и шестому пазу 2204f для приема E-образного кольца, соответственно.
[0161] E-образное кольцо 2205 конфигурируется с кольцевым участком хомута, который является частично открытым, и зубчатым участком, протягивающимся радиально внутрь от участка хомута.
[0162] E-образное кольцо 2205 вставляется в паз 2204 для приема E-образного кольца через участок, который является частично открытым.
[0163] Фиг. 5C является видом в перспективе, иллюстрирующим состояние, в котором приводящий участок присоединяется к валу, иллюстрированному на фиг. 5B.
[0164] Приводящий участок 223 может быть сформирован в многоугольной столбчатой форме. Паз 2233 для направления вращения размещается на радиально внешней стороне приводящего участка 223. Паз 2233 для направления вращения протягивается, в то же время являясь наклоненным на предварительно определенный угол от продольного направления вала 220.
[0165] Сквозное отверстие размещается в центре приводящего участка 223, чтобы размещать вал 220. Кроме того, отверстие 2231 для присоединения шипа, зацепленное с шипом 2202, размещается утопленным на передней стороне приводящего участка 223.
[0166] Далее в данном документе будет описан способ соединения между приводящим участком 223 и валом.
[0167] Приводящий участок 223 может быть размещен во множественном числе в продольном направлении вала 220. В варианте осуществления настоящего раскрытия два приводящих участка 223 присоединяются к валу 220.
[0168] Позиция присоединения приводящего участка 223 определяется по позициям шипа 2202 и E-образного кольца 2205.
[0169] Сначала приводящий участок 223 вставляется с задней стороны вала 220 в его переднюю сторону через сквозное отверстие. Когда приводящий участок 223 вставляется в позицию, где второй шип 2202b размещается, второй шип 2202b вставляется в отверстие 2231 для присоединения шипа. Затем, с задней стороны приводящего участка 223, первое E-образное кольцо 2205a вставляется в первый паз 2204a для приема E-образного кольца.
[0170] Приводящий участок 223 толкается от передней стороны в заднюю сторону вторым шипом 2202b и толкается в переднюю сторону первым E-образным кольцом 2205a с задней стороны. Посредством этого приводящий участок 223 закрепляется в продольном направлении. Кроме того, поскольку отверстие 2231 для присоединения шипа приводящего участка 223 зацепляется со вторым шипом 2202b, вращательное усилие вала 220 передается приводящему участку 223. Посредством этого вал 220 и приводящий участок 223 вращаются вместе.
[0171] Приводящий участок 223 также позиционируется между третьим шипом 2202c и вторым E-образным кольцом 2205b, и приводящий участок 223 присоединяется к валу 220 таким же образом, что и описанный выше.
[0172] Приводящий участок 223 может быть объединен в вал 220 и не ограничивается вышеописанным способом присоединения.
[0173] Первый шип 2202a, вставленный в переднюю сторону вала 220, зацепляется с участком 255 для направления вала первой концевой крышки 250, которая должна быть описана позже. Когда корпусной элемент 210 вращается посредством участка передачи первой мощности, первый шип 2202a вращается вместе с участком 255 для направления вала первой концевой крышки 250. Посредством этого первый шип 2202a передает вращательное усилие корпусного элемента 210 валу 220.
[0174] Третье E-образное кольцо 2205c и четвертое E-образное кольцо 2205d позиционируются со второй концевой крышкой 260, вставленной между ними. В частности, третье E-образное кольцо 2205c и четвертое E-образное кольцо 2205d позиционируются со второй концевой пластиной 261, вставленной между ними.
[0175] Когда вал 220 движется в переднюю сторону, поверхность передней стороны четвертого E-образного кольца 2205d толкает поверхность задней стороны второй концевой пластины 261. Посредством этого перемещение вала 220 в переднюю сторону останавливается.
[0176] Когда вал 220 движется в заднюю сторону, поверхность задней стороны третьего E-образного кольца 2205d толкает поверхность передней стороны второй концевой пластины 261. Посредством этого перемещение вала 220 в заднюю сторону останавливается.
[0177] Т.е., третье E-образное кольцо 2205c и четвертое E-образное кольцо 2205d ограничивают расстояние возвратно-поступательного перемещения вала 220.
[0178] Пятое E-образное кольцо 2205e и шестое E-образное кольцо 2205f позиционируются на передней и задней сторонах участка 270 для приема вала, соответственно. Посредством этого участок 270 для приема вала закрепляется в продольном направлении.
[0179] Фиг. 6 является видом в перспективе, иллюстрирующим первую концевую крышку, иллюстрированную на фиг. 4.
[0180] Обращаясь к фиг. 6, участок 255 направления вала выступает из первой концевой крышки 250.
[0181] Участок 255 направления вала может быть определен в цилиндрической форме. Однако, одна сторона участка 255 направления вала является открытой, чтобы размещать крайний участок передней стороны вала 220, и центральный его участок проходится насквозь в радиальном направлении, чтобы размещать первый шип 2202a.
[0182] Крайний участок передней стороны вала 220, к которому первый шип 2202a присоединяется, присоединяется с возможностью скольжения к участку 255 для направления вала. Т.е., участок 255 направления вала направляет возвратно-поступательное перемещение вала 220. Кроме того, когда первая концевая крышка 250 вращается, участок 255 направления вала и крайний участок передней стороны вала 220 зацепляются друг с другом, чтобы вращаться вместе.
[0183] Фиг. 7 является видом в перспективе, иллюстрирующим корпусной элемент, иллюстрированный на фиг. 4.
[0184] Обращаясь к фиг. 7, корпусной элемент 210 определяется в цилиндрической форме с открытыми обеими сторонами. Кроме того, утопленный паз 211, утопленный в продольном направлении, чтобы размещать щеточный участок 230, размещается на внешней периферийной поверхности. Утопленный паз 211 может быть размещен во множественном числе в круговом направлении.
[0185] Отверстие 213 для направления вращения размещается в утопленном пазе 211, проходя насквозь. Приводимый участок 2323 щеточного участка 230 вставляется в корпусной элемент 210 через отверстие 213 для направления вращения. Кроме того, отверстие 213 для направления вращения предоставляет пространство, в котором приводимый участок 2323 имеет возможность вращаться.
[0186] Отверстия 213 для направления вращения могут быть размещены во множественном числе в продольном направлении. Другими словами, когда приводимый участок 2323 размещается во множественном числе в продольном направлении, отверстие 213 для направления вращения может быть размещено с таким же количеством, что и количество приводимых участков 2323.
[0187] Кроме того, отверстие 215 для присоединения концевой крышки размещается на внешней периферийной поверхности корпусного элемента 210. Когда крайние участки первого соединительного выступа 254 и второго соединительного выступа 264 улавливаются в отверстие 215 для присоединения концевой крышки, первая концевая крышка 250 и вторая концевая крышка 260 присоединяются к корпусному элементу 210.
[0188] Фиг. 8 является видом в перспективе, иллюстрирующим щеточный участок, иллюстрированный на фиг. 4.
[0189] Щеточный участок 230 включает в себя щетку 231 и держатель 232 щетки.
[0190] Щетка 231 формируется из щеток или резинового пластинчатого материала. Щетка 231 ударяет поверхность, которая должна быть очищена, чтобы захватывать или поднимать пыль или посторонние вещества.
[0191] Держатель 232 щетки предоставляется в утопленном пазу 211 корпусного элемента 210 в продольном направлении. Вращающиеся выступы 2322 выступают из его обоих крайних участков, соответственно, в продольном направлении. Каждый из вращающихся выступов 2322 присоединяется с возможностью вращения к первому отверстию 251a для приема вращающегося выступа первой концевой крышки 250 и второму отверстию 261a для приема вращающегося выступа второй концевой крышки 260.
[0192] Т.е., держатель 232 щетки вращается относительно оси, проходящей через вращающийся выступ 2322 в утопленном пазу 211.
[0193] Участок 2321 для присоединения щетки, в котором щетка 231 вставляется, размещается на одной стороне держателя 232 щетки. Кроме того, приводимый участок 2323 размещается на другой стороне, противоположной первой стороне.
[0194] Приводимый участок 2323 протягивается в корпусной элемент через отверстие 213 для направления вращения, проходящий через утопленный паз 211.
[0195] Щеточный участок 230 вращается относительно одной стороны, на которой размещается вращающийся выступ 2322. Т.е., щетка 231 и приводимый участок 2323 вращаются относительно одной стороны щеточного участка 230.
[0196] Фиг. 9 является видом в перспективе, иллюстрирующим участок для приема вала, иллюстрированный на фиг. 4.
[0197] В участке 270 для приема вала участок 270b для приема подшипника и отверстие 270a для присоединения вала последовательно размещены от передней стороны к задней стороне. Отверстие 270a для присоединения вала является сквозным отверстием, в которое вал 220 может быть вставлен. Задний крайний участок вала 220 вставляется с возможностью вращения в отверстие 270a для присоединения вала, проходя через участок 270b для приема подшипника. В присоединенном состоянии подшипник вставляется между внешней периферийной поверхностью вала 220 и участком 270b для приема подшипника. Посредством этого вал 220 может вращаться отдельно от участка 270 для приема вала.
[0198] Фиг. 10A является видом в перспективе, иллюстрирующим состояние перед тем, как щеточный участок перемешивателя, иллюстрированного на фиг. 3, расширяется, и фиг. 10B является видом в перспективе, иллюстрирующим состояние, в котором щеточный участок перемешивателя, иллюстрированного на фиг. 3, расширяется.
[0199] Для удобства описания часть корпусного элемента 210, первая концевая крышка 250 и вторая концевая крышка 260 указываются пунктирными линиями. Кроме того, E-образное кольцо 2205 пропущено.
[0200] Во время процесса очистки перемешиватель 200 вращается. Когда перемешиватель 200 вращается, один крайний участок щетки 231 перемешивателя 200 также вращается. Когда один крайний участок щетки 231 ударяет поверхность, которая должна быть очищена, пыль или посторонние вещества, находящиеся на поверхности, которая должна быть очищена, сгоняются или захватываются щеткой 231.
[0201] Здесь, радиус вращения щетки 231 является расстоянием между валом 220 и крайним участком щетки 231 в самой дальней позиции от вала 220.
[0202] Поскольку ковер формируется с ворсом на поверхности, пылесос 100 располагается с интервалом от поверхности ковра. Соответственно, в случае, когда поверхность, которая должна быть очищена, является окружающей обстановкой ковра, когда радиус вращения щетки 231 является фиксированным, может быть проблема в том, что щетка 231 не достигает поверхности ковра.
[0203] Аспектом настоящего раскрытия является предоставление перемешивателя 200, имеющего конструкцию, приспособленную для расширения радиуса вращения щетки 231, когда поверхность, которая должна быть очищена, является окружающей обстановкой ковра. Поскольку радиус вращения щетки 231 расширяется в окружающей обстановке ковра, щетка 231 может достигать поверхности ковра.
[0204] Перемешиватель 200 согласно варианту осуществления настоящего раскрытия может расширять радиус вращения щетки 231, вращая щеточный участок 230 относительно одной своей стороны.
[0205] Далее в данном документе будет описан процесс работы, в котором радиус вращения щетки 231 расширяется.
[0206] Вал 220 размещается в корпусном элементе 210. Крайний участок передней стороны вала 220 присоединяется с возможностью скольжения к участку 255 для направления вала первой концевой крышки 250. Кроме того, крайний участок задней стороны вала 220 присоединяется с возможностью вращения к отверстию 261b для приема вала второй концевой крышки 250.
[0207] Т.е., вал 220 поддерживается участком 255 для направления вала и отверстием 261b для приема вала и перемещается в продольном направлении в участке 255 для направления вала и отверстии 261b для приема вала.
[0208] Приводящий участок 223 выступает из внешней периферийной поверхности вала 220. Когда вал 220 выполняет возвратно-поступательное перемещение, приводящий участок 223 перемещается вместе.
[0209] Паз 2233 для направления вращения, протягивающийся под предварительно определенным углом относительно продольного направления вала 220, размещается на радиально внешней стороне приводящего участка 223.
[0210] Щеточный участок 230 вращается относительно оси, проходящей через вращающийся выступ 2322. Ось, проходящая через вращающийся выступ 2322 называется осью вращения. В это время щетка 231 протягивается в одну сторону от оси вращения, а приводимый участок 2323 протягивается в другую сторону от нее. Т.е., щетка 231 и приводимый участок 2323 вращаются относительно оси вращения.
[0211] Паз 2233 для направления вращения направляет щеточный участок 230 во вращение. Крайний участок приводимого участка 2323 вставляется в паз 2233b для направления вращения. Когда паз 2233b для направления вращения перемещается в продольном направлении вместе с валом 220, крайний участок приводимого участка 2323 направляется внутри паза 2233b для направления вращения.
[0212] Перемещение приводимого участка 2323 в пазу 2233b для направления вращения является следующим.
[0213] Поскольку приводимый участок 2323 прикрепляется к корпусному элементу 210, и приводимый участок 2323 закрепляется без движения в продольном направлении. Однако, приводимый участок 2323 может поворачиваться на предварительно определенный угол относительно оси, проходящей через вращающийся выступ 2322.
[0214] Диапазон вращения вращающегося выступа 2322 определяется наклоном паза 2233b для направления вращения.
[0215] Поскольку паз 2233b для направления вращения протягивается на предварительно определенный угол относительно продольного направления, оба крайних участка паза 2233b для направления вращения располагаются с интервалом друг от друга в направлении, пересекающем продольное направление. Когда оно называется разделительным расстоянием паза 2233b для направления вращения, расстояние перемещения крайнего участка приводимого участка 2323 в диапазоне вращения приводимого участка 2323 определяется по разделительному расстоянию.
[0216] Когда приводящий участок 223 выполняет возвратно-поступательное движение в продольном направлении, крайний участок приводимого участка 2323 в пазу 2233b для направления вращения выполняет возвратно-поступательное движение в направлении, пересекающем продольное направление. Посредством этого щеточный участок 230 вращается. Расстояние между валом 220 и крайним участком радиально внешней стороны щетки 231 изменяется посредством вращения щеточного участка 230. Т.е., радиус вращения щетки 231 изменяется.
[0217] Обращаясь снова к фиг. 10A, иллюстрируется состояние, в котором вал 220 максимально перемещается в переднюю сторону. Крайний участок передней стороны вала 220 размещается рядом с задней поверхностью первой концевой крышки 250. В этот момент крайний участок приводимого участка 2323 размещается на задней стороне паза 2233 для направления вращения. Это состояние называется первым состоянием.
[0218] Обращаясь снова к фиг. 10B, иллюстрируется состояние, в котором вал 220 максимально перемещается в заднюю сторону в первом состоянии. Это состояние называется вторым состоянием. Во втором состоянии крайний участок передней стороны вала 220 перемещается от задней поверхности первой концевой крышки 250. В это время крайний участок приводимого участка 2323 перемещается в переднюю сторону паза 2233 для направления вращения.
[0219] Передняя сторона и задняя сторона паза 2233 для направления вращения располагаются с интервалом друг от друга в направлении, пересекающем продольное направление. Т.е., крайний участок приводимого участка 2323 перемещается в направлении, пересекающем продольное направление. Когда крайний участок приводимого участка 2323 перемещается, приводимый участок 2323 вращается относительно оси, проходящей через вращающийся выступ 2322. Посредством этого щетка 231 также вращается относительно оси, проходящей через вращающийся выступ 2322.
[0220] Другими словами, щетка 231 вращается посредством возвратно-поступательного перемещения приводящего участка 223.
[0221] Далее в данном документе процесс изменения радиуса вращения щетки 231 будет описан со ссылкой на фиг. 10C.
[0222] Фиг. 10C является видом сбоку, иллюстрирующим рабочее состояние щеточного участка перемешивателя, иллюстрированного на фиг. 3.
[0223] Для удобства описания, некоторые из компонентов указываются пунктирными линиями.
[0224] (a) на фиг. 10C иллюстрирует радиус вращения щетки 231 в первом состоянии, а (b) на фиг. 10C иллюстрирует радиус вращения щетки 231 во втором состоянии.
[0225] В первом состоянии крайний участок приводимого участка 2323 размещается на задней стороне паза 2233 для направления вращения. В это время щетка 231 формирует угол A относительно воображаемой линии, проходящей центральную ось вала 220 и ось вращения щеточного участка 230.
[0226] Центральная ось вала 220 и крайний участок радиально внешней стороны щетки 231 разносятся на первый радиус R1 вращения. Кроме того, расстояние между центральной осью вала 220 и осью вращения щеточного участка 230 разносится на L1, а расстояние между осью вращения щеточного участка 230 и крайним участком радиально внешней стороны щетки 231 разносится на L2.
[0227] Здесь, первый радиус R1 вращения может быть получен по следующему уравнению.
[0228] 
[0229] Здесь cos(A) имеет значение менее 1.
[0230] Когда перемешиватель 200 переходит из первого состояния во второе состояние, крайний участок приводимого вала 2323 перемещается в переднюю сторону паза 2233 для направления вращения. Посредством перемещения крайнего участка приводимого участка 2323 щеточный участок 230 вращается. В это время щеточный участок 231 размещается параллельно воображаемой линии, проходящей через центральную ось вала 220 и ось вращения щеточного участка 230. Т.е., щетка 231 формирует угол, равный 0, относительно воображаемой линии, проходящей центральную ось вала 220 и ось вращения щеточного участка 230.
[0231] Во втором состоянии центральная ось вала 220 и крайний участок радиально внешней стороны щетки 231 разносятся на второй радиус R2 вращения. Здесь, второй радиус R2 вращения равен L1+L2.
[0232] Здесь, значения первого радиуса R1 вращения и второго радиуса R2 вращения имеют следующее соотношение.
[0233] 
[0234] Т.е., второй радиус R2 вращения формируется более значительным по сравнению с первым радиусом R1 вращения.
[0235] В окружающей обстановке ковра перемешиватель 200 переходит из первого состояния во второе состояние. Посредством этого радиус вращения щетки 231 расширяется от первого радиуса R1 вращения до второго радиуса R2 вращения. Когда радиус вращения расширяется, щетка 231 может достигать даже пыли или посторонних веществ, находящихся на поверхности ковра. Другими словами, радиус вращения щетки 231 может быть расширен, даже когда поверхность, которая должна быть очищена, изменяется, тем самым, предотвращая снижение характеристики очистки.
[0236] Фиг. 11 является видом сбоку, иллюстрирующим модифицированный пример перемешивателя, иллюстрированного на фиг. 3.
[0237] (a) на фиг. 11 иллюстрирует первое состояние, прежде чем щетка 331 расширяется. (b) на фиг. 11 иллюстрирует второе состояние, после того как щетка 331 расширяется.
[0238] На фиг. 11 закрепленный щеточный участок 380 выступает из внешней периферийной поверхности корпусного лемента 310. Другая конфигурация, которая не была описана на фиг. 11, может пониматься со ссылкой на вариант осуществления настоящего раскрытия.
[0239] В первом состоянии крайний участок приводимого участка 3323 размещается на задней стороне паза 3233 для направления вращения. В это время щетка 331 формирует угол A относительно воображаемой линии, проходящей центральную ось вала 320 и ось вращения щеточного участка 330.
[0240] Центральная ось вала 320 и крайний участок радиально внешней стороны щетки 331 разносятся на первый радиус R1 вращения. Кроме того, расстояние между центральной осью вала 320 и осью вращения щеточного участка 330 разносится на L1, а расстояние между осью вращения щеточного участка 330 и крайним участком радиально внешней стороны щетки 331 разносится на L2.
[0241] Здесь, первый радиус R1 вращения может быть получен по следующему уравнению.
[0242] 
[0243] Здесь cos(A) имеет значение менее 1.
[0244] Когда перемешиватель 300 переходит из первого состояния во второе состояние, крайний участок приводимого участка 3323 перемещается в переднюю сторону паза 3233 для направления вращения. Посредством перемещения крайнего участка приводимого участка 3323 щеточный участок 330 вращается. В это время щетка 331 размещается параллельно воображаемой линии, проходящей через центральную ось вала 320 и ось вращения щеточного участка 230. Т.е., щетка 331 формирует угол, равный 0, относительно воображаемой линии, проходящей центральную ось вала 320 и ось вращения щеточного участка 330.
[0245] Во втором состоянии центральная ось вала 220 и крайний участок радиально внешней стороны щетки 331 разносятся на второй радиус R2 вращения. Здесь, второй радиус R2 вращения может быть выражен как L1+L2 * cos(0). Здесь, второй радиус R2 вращения равен L1+L2.
[0246] Здесь, значения первого радиуса R1 вращения и второго радиуса R2 вращения имеют следующее соотношение.
[0247] 
[0248] Т.е., второй радиус R2 вращения формируется более значительным по сравнению с первым радиусом R1 вращения.
[0249] Закрепленный щеточный участок 380 выступает из внешней периферийной поверхности корпусного элемента 310 в продольном направлении. Закрепленный щеточный участок 380 может быть интегрирован в или объединен с корпусным элементом 310. Расстояние между крайним участком радиально внешней стороны закрепленного щеточного участка 380 и центральной осью вала 320 разнесено на третий радиус R3 вращения.
[0250] В это время третий радиус R3 вращения больше первого радиуса R1 вращения и меньше второго радиуса R2 вращения. Кроме того, закрепленный щеточный участок 380 может быть размещен параллельно линии нормали внешней периферийной поверхности корпусного элемента 310, на котором предусматривается закрепленный щеточный участок 380.
[0251] В первом состоянии третий радиус R3 вращения больше первого радиуса R1 вращения. Соответственно, поверхность, которая должна быть очищена, очищается закрепленным щеточным участком 380.
[0252] Когда поверхность, которая должна быть очищена, меняется с твердого пола на ковер, перемешиватель 300 переходит из первого состояния во второе состояние. В это время радиус вращения щетки 331 расширяется от первого радиуса R1 вращения до второго радиуса R2 вращения. Второй радиус R2 вращения больше третьего радиуса R3 вращения, который является радиусом вращения закрепленного щеточного участка 380. Т.е., радиус вращения расширяется.
[0253] Посредством этого щетка 331 может достигать даже пыли или посторонних веществ, находящихся на поверхности ковра. Т.е., радиус вращения щетки 331 может быть расширен, даже когда поверхность, которая должна быть очищена, изменяется, тем самым, предотвращая снижение характеристики очистки.
[0254] Другими словами, поверхность, которая должна быть очищена, очищается посредством закрепленного щеточного участка 380 в первом состоянии, и поверхность, которая должна быть очищена, очищается посредством расширенной щетки 331 во втором состоянии.
[0255] Когда очистка выполняется только посредством щетки 331 без предоставления закрепленного щеточного участка 380, следующая проблема может возникать.
[0256] Когда закрепленный щеточный участок 380 не предусматривается, поверхность, которая должна быть очищена, очищается посредством щетки 331, которая не выдвинута в первое состояние. В это время щетка 331 наклонена в направлении по часовой стрелке относительно направления вращения щеточного участка 330.
[0257] Здесь, когда перемешиватель 300 вращается в направлении по часовой стрелке, давление, с которым щетка 331 нажимает на поверхность, которая должна быть очищена, может быть избыточно сформировано. Это может неблагоприятно влиять на долговечность щетки 331.
[0258] Наоборот, когда перемешиватель 300 вращается в направлении против часовой стрелки, давление, с которым щетка 331 нажимает на поверхность, которая должна быть очищена, может быть недостаточным. Разница в характеристике очистки может быть вызвана в первом состоянии и втором состоянии.
[0259] В модифицированном примере, иллюстрированном на фиг. 11, в первом состоянии, закрепленный щеточный участок 380 находится параллельно линии нормали внешней периферийной поверхности, на которой предусматривается закрепленный щеточный участок 380. Кроме того, щетка 331, выдвинутая во втором состоянии, находится параллельно воображаемой линии, проходящей через центральную ось вала 320 и ось вращения щеточного участка 330.
[0260] Посредством этого, когда щеточный участок 380 или щетка 331 прикладывает нажатие к поверхности, которая должна быть очищена, щеточный участок 380 или щетка 331 могут быть перпендикулярны поверхности, которая должна быть очищена.
[0261] Т.е., соответствующее давление нажатия может быть применено к поверхности, которая должна быть очищена, в первом состоянии и втором состоянии без формирования избыточного давления для щетки 331.
[0262] Фиг. 12 является видом сбоку, иллюстрирующим другой модифицированный пример перемешивателя, иллюстрированного на фиг. 3.
[0263] (a) на фиг. 12 иллюстрирует первое состояние, прежде чем щетка 431 расширяется. (b) на фиг. 12 иллюстрирует второе состояние, после того как щетка 431 расширяется.
[0264] На фиг. 12 щеточный участок 430 иллюстрируется в модифицированной форме. Модифицированная конфигурация, которая не была описана на фиг. 12, может пониматься со ссылкой на вариант осуществления настоящего раскрытия.
[0265] Обращаясь к фиг. 12, иллюстрируется модифицированный щеточный участок 430. Щеточный участок 430 может включать в себя первую щетку 431a и вторую щетку 431b, протягивающиеся под предварительно определенным углом друг к другу.
[0266] Первый участок 2321a для присоединения щетки, который размещает первую щетку 431a, и второй участок 2321b для присоединения щетки, который размещает вторую щетку 431b, располагаются в держателе 432 щетки. Приводимый участок 4323 протягивается от нижней поверхности держателя 432 щетки.
[0267] Первая щетка 431a и вторая щетка 431b могут быть расположены имеющими различные длины. Первая щетка 431a размещается как более короткая по сравнению со второй щеткой 431b.
[0268] Расстояние между осью вращения щеточного участка 430 и крайним участком радиально внешней стороны первой щетки 431a называется L2, а расстояние между осью вращения щеточного участка 430 и крайним участком радиально внешней стороны второй щетки 431b называется L3. Кроме того, длина между центральной осью вала 420 и осью вращения щеточного участка 430 называется L1.
[0269] В первом состоянии крайний участок приводимого участка 4323 размещается на задней стороне паза 4233 для направления вращения.
[0270] В это время первая щетка 431a размещается параллельно воображаемой линии, проходящей через центральную ось вала 420 и ось вращения щеточного участка 430. Т.е., первая щетка 431a формирует угол, равный 0, относительно воображаемой линии, проходящей центральную ось вала 420 и ось вращения щеточного участка 430.
[0271] Центральная ось вала 420 и крайний участок радиально внешней стороны первой щетки 431a разносятся на первый радиус R1 вращения. Здесь, первый радиус R1 вращения равен L1+L2.
[0272] Т.е., первый радиус R1 вращения равен длине L1+L2, которая больше расстояния от центральной оси вала 420 до крайнего участка радиально внешней стороны второй щетки 431b.
[0273] Т.е., в первом состоянии очищаемый пол очищается первой щеткой 431a.
[0274] Когда перемешиватель 400 переходит из первого состояния во второе состояние, крайний участок приводимого участка 4323 перемещается в переднюю сторону паза 4233 для направления вращения. Посредством перемещения крайнего участка приводимого участка 4323 щеточный участок 430 вращается.
[0275] В это время вторая щетка 431b размещается параллельно воображаемой линии, проходящей через центральную ось вала 420 и ось вращения щеточного участка 430. Т.е., вторая щетка 431b формирует угол, равный 0, относительно воображаемой линии, проходящей центральную ось вала 420 и ось вращения щеточного участка 430.
[0276] Во втором состоянии центральная ось вала 420 и крайний участок радиально внешней стороны второй щетки 431b разносятся на второй радиус R2 вращения. Здесь, второй радиус R2 вращения равен L1+L3.
[0277] Т.е., первый радиус R1 вращения равен длине L1+L3, которая больше расстояния от центральной оси вала 420 до крайнего участка радиально внешней стороны второй щетки 431a.
[0278] Т.е., в первом состоянии, очищаемый пол очищается второй щеткой 431b.
[0279] Кроме того, поскольку длина L3 второй щетки 431b больше длины L2 первой щетки 431a, второй радиус R2 вращения больше первого радиуса R1 вращения.
[0280] Другими словами, когда перемешиватель 400 переходит из первого состояния во второе состояние, радиус вращения щеточного участка 430 для очистки поверхности, которая должна быть очищена, расширяется от первого радиуса R1 вращения до второго радиуса R2 вращения.
[0281] Когда поверхность, которая должна быть очищена, меняется с твердого пола на ковер, перемешиватель 400 переходит из первого состояния во второе состояние. В это время радиус вращения щеточного участка 430 расширяется от первого радиуса R1 вращения до второго радиуса R2 вращения.
[0282] Посредством этого вторая щетка 431b может достигать даже пыли или посторонних веществ, находящихся на поверхности ковра. Т.е., радиус вращения щеточного участка 430 может быть расширен, даже когда поверхность, которая должна быть очищена, изменяется, тем самым, предотвращая снижение характеристики очистки.
[0283] Другими словами, поверхность, которая должна быть очищена, очищается посредством первой щетки 431a в первом состоянии, и поверхность, которая должна быть очищена, очищается посредством второй щетки 431b во втором состоянии.
[0284] В модифицированном примере, иллюстрированном на фиг. 12, первая щетка 431a в первом состоянии и вторая щетка 431b во втором состоянии находятся параллельно воображаемой линии, проходящей через центральную ось вала 420 и ось вращения щеточного участка 430.
[0285] Посредством этого, когда первая щетка 431a или вторая щетка 431b применяет нажатие к поверхности, которая должна быть очищена, первая щетка 431a или вторая щетка 431b может быть перпендикулярной поверхности, которая должна быть очищена.
[0286] Т.е., соответствующее давление нажатия может быть применено к поверхности, которая должна быть очищена, в первом состоянии и втором состоянии без формирования избыточного давления для щетки 331.
[0287] Фиг. 13A является частичным видом в перспективе, иллюстрирующим другой модифицированный пример перемешивателя, иллюстрированного на фиг. 3, а фиг. 13B является частичным видом в перспективе, иллюстрирующим состояние, в котором щетка перемешивателя на фиг. 13A является выдвинутой.
[0288] Т.е., фиг. 13A иллюстрирует первое состояние, прежде чем щетка 531 выдвигается. Фиг. 13B иллюстрирует второе состояние, после того как щетка 531 выдвигается.
[0289] На фиг. 13A приводящий участок 523 и приводимый участок 5323 для вращения щеточного участка 530 иллюстрируются в модифицированной форме. Фиг. 13 является частичным видом в перспективе задней стороны перемешивателя 500, и другая немодифицированная конфигурация может быть понята со ссылкой на вариант осуществления настоящего раскрытия.
[0290] Обращаясь к фиг. 13A, приводящий участок 523 выступает в радиальном направлении от вала 520. Приводящий участок 523 может быть размещен в форме усеченного конуса.
[0291] Наклонная внешняя периферийная поверхность 523a приводящего участка 523 наклоняется радиально наружу в продольном направлении.
[0292] Приводимый участок 5323, протягивающийся от держателя 532 щетки в корпусной элемент 511, включает в себя наклонный участок 5323a. Наклонный участок 5323a приводится в контакт с внешней периферийной поверхностью 523a приводящего участка 523.
[0293] Когда первое состояние переходит во второе состояние, вал 520 перемещается с задней стороны в переднюю сторону. В этом случае приводящий участок 523, выступающий из внешней периферийной поверхности вала 520, также перемещается с передней стороны в заднюю сторону.
[0294] Когда приводящий участок 523 перемещается с задней стороны в переднюю сторону, наклонная внешняя периферийная поверхность 523a приводящего участка 523 толкает наклонный участок 5323a приводимого участка 5323. Наклонный участок 5323a поднимается вдоль наклонной внешней периферийной поверхности 523a, и приводимый участок 5323 вращается относительно оси, проходящей через вращающийся выступ 5322.
[0295] Т.е., наклонная внешняя периферийная поверхность 523a толкает наклонный участок 5323a, чтобы направлять приводимый участок 5323 во вращение.
[0296] Когда приводимый участок 5323 вращается, щетка 531 также вращается относительно оси, проходящей через вращающийся выступ 5322.
[0297] Другими словами, щетка 531 вращается посредством возвратно-поступательного перемещения приводящего участка 523.
[0298] Далее в данном документе процесс изменения радиуса вращения щетки 531 будет описан со ссылкой на фиг. 13C.
[0299] Фиг. 13C является видом сбоку, иллюстрирующим рабочее состояние щеточного участка перемешивателя, иллюстрированного на фиг. 13A и 13B.
[0300] (a) на фиг. 13C иллюстрирует радиус вращения щетки 531 в первом состоянии, а (b) на фиг. 13C иллюстрирует радиус вращения щетки 531 во втором состоянии.
[0301] В первом состоянии наклонный участок 5323a приводимого участка 5323 приводится в контакт с наклонной внешней периферийной поверхностью 523a приводящего участка 523. В это время щетка 531 формирует угол A относительно воображаемой линии, проходящей центральную ось вала 520 и ось вращения щеточного участка 530.
[0302] Центральная ось вала 520 и крайний участок радиально внешней стороны щетки 531 разносятся на первый радиус R1 вращения. Кроме того, расстояние между центральной осью вала 520 и осью вращения щеточного участка 530 разносится на L1, а расстояние между осью вращения щеточного участка 530 и крайним участком радиально внешней стороны щетки 531 разносится на L2.
[0303] Здесь, первый радиус R1 вращения может быть получен по следующему уравнению.
[0304] 
[0305] Здесь cos(A) имеет значение менее 1.
[0306] Когда перемешиватель 500 переходит из первого состояния во второе состояние, наклонный участок 5323a приводимого участка 5323 поднимается вдоль наклонной внешней периферийной поверхности 523a. Когда наклонный участок 5322a поднимается вдоль наклонной внешней периферийной поверхности 523a, приводимый участок 5323 вращается относительно оси, проходящей через вращающийся выступ 5322. Т.е., щеточный участок 530 вращается.
[0307] В это время щетка 531 размещается параллельно воображаемой линии, проходящей через центральную ось вала 520 и ось вращения щеточного участка 530. Т.е., щетка 531 формирует угол, равный 0, относительно воображаемой линии, проходящей центральную ось вала 520 и ось вращения щеточного участка 530.
[0308] Во втором состоянии центральная ось вала 520 и крайний участок радиально внешней стороны щетки 531 разносятся на второй радиус R2 вращения. Здесь, второй радиус R2 вращения равен L1+L2.
[0309] Т.е., значения первого радиуса R1 вращения и второго радиуса R2 вращения имеют следующее соотношение.
[0310] 
[0311] Т.е., второй радиус R2 вращения формируется более значительным по сравнению с первым радиусом R1 вращения.
[0312] В окружающей обстановке ковра перемешиватель 500 переходит из первого состояния во второе состояние. Посредством этого радиус вращения щетки 531 расширяется от первого радиуса R1 вращения до второго радиуса R2 вращения. Когда радиус вращения расширяется, щетка 531 может достигать даже пыли или посторонних веществ, находящихся на поверхности ковра. Другими словами, радиус вращения щетки 531 может быть расширен, даже когда поверхность, которая должна быть очищена, изменяется, тем самым, предотвращая снижение характеристики очистки.
[0313] Далее в данном документе чистящий блок, включающий в себя компоненты для управления перемешивателем настоящего раскрытия, и способ управления им будут описаны подробно со ссылкой на фиг. 14-16.
[0314] В последующем описании описание некоторых компонентов будет пропущено, чтобы прояснять отличительные признаки настоящего раскрытия.
[0315] Фиг. 14 является блок-схемой, иллюстрирующей конфигурацию для управления чистящим блоком согласно настоящему раскрытию.
[0316] Обращаясь к фиг. 14, чистящий блок, имеющий компоненты для управления перемешивателем настоящего раскрытия, включает в себя узел 10 корпуса, датчик 20, контроллер 30 и базу 40 данных.
[0317] Сначала будет описан узел 10 корпуса.
[0318] Узел 10 корпуса определяет корпус чистящего блока настоящего раскрытия.
[0319] Например, кожух 10 корпуса может быть корпусом 110 пылесоса на фиг. 1, иллюстрированной для описания робота-пылесоса предшествующего уровня техники.
[0320] Предварительно определенное пространство формируется в узле 10 корпуса. Датчик 20, контроллер 30 и база 40 данных могут быть предусмотрены в пространстве.
[0321] Также, узел 10 корпуса включает в себя приводной (или приводящий) модуль 11 и силовой модуль 13.
[0322] Приводной модуль 11 может приводиться в действие посредством силового модуля 13. Т.е., приводящее усилие, создаваемое посредством силового модуля 13, может быть передано приводному модулю 11.
[0323] В некоторых реализациях приводной модуль 11 может включать в себя вращающийся модуль 11a и регулирующий модуль 11b. Перемешиватель 200, 300, 400, 500 согласно настоящему раскрытию может быть использован для вращающегося модуля 11a, и участок 270 для приема вала согласно настоящему раскрытию может быть использован для регулирующего модуля 11b.
[0324] Силовой модуль 13 может включать в себя первый силовой модуль 13a и второй силовой модуль 13b. Первый силовой модуль 13a в качестве модуля, который создает вращательное усилие, соединяется с вращающим модулем 11a, чтобы вращать вращающий модуль 11a. Второй силовой модуль 13b в качестве модуля, который толкает и тянет регулирующий модуль 11b в конкретном направлении, может быть присоединен к регулирующему модулю 11b, чтобы приводить в действие регулирующий модуль 11b.
[0325] В некоторых реализациях сервомотор, который создает вращательное усилие, может быть использован для первого силового модуля 13a, и линейный сервомотор, который прикладывает давление в конкретном направлении, может быть использован для второго силового модуля 13b. Однако, другие известные силовые устройства, приспособленные для создания вращательного усилия и приложения давления в конкретном направлении, могут быть использованы в дополнение к сервомотору и линейному сервомотору.
[0326] Перемешиватель 200, 300, 400, 500, присоединенный к нему, может вращаться посредством первого силового модуля 13a. Кроме того, участок 270, 370 для приема вала может толкаться или тянуться посредством второго силового модуля 13b во время вращения.
[0327] Посредством этого, когда вал 220, 320, 420 и 520 перемещается в направлении передней стороны, радиус вращения щеточного участка 230, 330, 430, 530 может быть уменьшен.
[0328] Кроме того, когда вал 220, 320, 420, 520 перемещается в направлении задней стороны, радиус вращения щеточного участка 230, 330, 430, 530 может быть расширен.
[0329] В варианте осуществления настоящего раскрытия силовой модуль 13 может получать мощность извне. Силовой модуль 13 может снабжаться мощностью посредством аккумулятора (не показан), предусмотренного в корпусе 110 пылесоса. Силовой модуль 13 может быть электрически соединен с аккумулятором (не показан).
[0330] Первый силовой модуль 13a и второй силовой модуль 13b могут приводиться в действие независимо. Т.е., вращение первого силового модуля 13a и второго силового модуля 13b, число вращений и т.п. могут регулироваться независимо друг от друга. Для этого первый силовой модуль 13a и второй силовой модуль 13b могут, каждый, быть электрически соединены с контроллером 30.
[0331] Далее в данном документе будет описан датчик 20.
[0332] Датчик 20 может обнаруживать значение тока, формируемого, когда вращающийся модуль 11a вращается посредством первого силового модуля 13a. Т.е., первый силовой модуль 13a может обнаруживать значение тока, формируемого посредством вращения перемешивателя 200, 300, 400, 500.
[0333] Информация, распознанная или обнаруженная посредством датчика 20, передается контроллеру 30, предоставляя возможность контроллеру 30 формировать управляющую информацию, подходящую для данного условия или ситуации.
[0334] Датчик 20 может быть предоставлен в форме, приспособленной для распознавания значения тока первого силового модуля 13a.
[0335] Датчик 20 может быть электрически соединен с аккумулятором (не показан). Мощность, требуемая для работы датчика 20, может подаваться от аккумулятора (не показан).
[0336] Датчик 20 включает в себя модуль 21 датчика значения тока, приспособленный для обнаружения значения тока. В некоторых реализациях модуль 21 датчика значения тока может измерять значение тока с помощью амперметра, который электрически соединяется с цепью, или посредством измерения магнитного поля.
[0337] Когда модуль 21 датчика значения тока распознает значение тока первого силового модуля 13a, состояние пола, на котором пылесос в настоящее время работает, может быть распознано.
[0338] Когда пылесос находится в окружающей обстановке ковра, а не в окружающей обстановке твердого пола, колеса пылесоса утапливаются на предварительно определенную длину от верха окружающей обстановки ковра, и, таким образом, первый силовой модуль 13a приводит в действие перемешиватель 200, 300, 400, 500. Значение тока, используемое для вращения, увеличивается.
[0339] Контроллер 30 может формировать соответствующую или правильную операционную информацию, сравнивая значение тока, обнаруженное посредством модуля 21 датчика значения тока, с предварительно определенным значением тока, чтобы определять то, что пылесос находится на ковре.
[0340] Модуль 21 датчика значения тока может быть соединен с первым силовым модулем 13a, чтобы измерять значение тока первого силового модуля 13a.
[0341] Далее в данном документе будет описан контроллер 30.
[0342] Контроллер 30 принимает значение тока от датчика 20 и вычисляет операционную информацию для работы второго силового модуля 13b.
[0343] Кроме того, контроллер 30 электрически соединяется с датчиком 20, чтобы принимать значение тока, обнаруженное посредством датчика 20.
[0344] Контроллер 30 может вычислять операционную информацию с помощью принятой распознанной информации. Дополнительно, контроллер 30 может управлять вторым силовым модулем 13b на основе вычисленной операционной информации. Для этого контроллер 30 электрически соединяется со вторым силовым модулем 13b.
[0345] Контроллер 30 электрически соединяется с базой 40 данных. Информация, обнаруженная посредством датчика 20, и информация, вычисленная контроллером 30, могут быть сохранены в базе 40 данных.
[0346] Различные модули контроллера 30, описанные далее в данном документе, электрически соединяются друг с другом, так что информация, вводимая в один модуль, или информация, вычисленная одним модулем, может быть передана другому модулю.
[0347] Контроллер 30 может быть предоставлен в форме, приспособленной для ввода, вывода и вычисления информации. В некоторых реализациях контроллер 30 может быть предоставлен в форме микропроцессора, центрального процессора (CPU), платы печатного монтажа (PCB) или т.п.
[0348] Контроллер 30 располагается в предварительно определенном пространстве, сформированном в корпусе 110 пылесоса. Контроллер 30 может быть размещен в пространстве герметично изолированным образом так, чтобы не подвергаться воздействию внешней влаги и т.п.
[0349] Контроллер 30 включает в себя модуль 32 приема информации распознавания, модуль 33 вычисления операционной информации и модуль 31 управления работой.
[0350] Модуль 33 вычисления операционной информации вычисляет операционную информацию для работы второго силового модуля 13b.
[0351] Модуль 33 вычисления операционной информации может вычислять операционную информацию с помощью текущего значения первого силового модуля 13a, переданную модулю 32 приема информации распознавания. Модуль 31 управления работой электрически соединяется с модулем 33 вычисления операционной информации.
[0352] Операционная информация может быть получена посредством модуля 31 управления работой. Модуль 31 управления работой конфигурируется, чтобы управлять вторым силовым модулем 13b согласно вычисленной операционной информации.
[0353] В частности, операционная информация обозначает информацию, в которой второй силовой модуль 13b толкает или тянет участок 270 для приема вала. Когда участок 270 для приема вала толкается или тянется посредством второго силового модуля 13b, перемешиватель 200, 300, 400, 500 может уменьшать или расширять радиус вращения щеточного участка 230, 330, 430, 530 во время вращения.
[0354] Далее в данном документе будет описана база 40 данных.
[0355] База 40 данных хранит информацию, касающуюся работы пылесоса.
[0356] База 40 данных может быть предоставлена в форме, приспособленной для ввода, вывода и хранения информации. В некоторых реализациях база 40 данных может быть предоставлена в форме SD-карты, микро SD-карты, USB-памяти, SSD или т.п.
[0357] База 40 данных электрически соединяется с модулем 33 вычисления операционной информации. Операционная информация, вычисленная посредством модуля 33 вычисления операционной информации, может быть передана в базу 40 данных для хранения.
[0358] База 40 данных электрически соединяется с датчиком 20 через модуль 32 приема информации распознавания. Значение тока, обнаруженное посредством датчика 20, может быть передано в базу 40 данных для хранения.
[0359] База 40 данных включает в себя модуль 41 хранения информации распознавания и модуль 42 хранения операционной информации. Модули 41 и 42 могут быть электрически соединены друг с другом.
[0360] Модуль 42 хранения операционной информации хранит операционную информацию, вычисленную модулем 33 вычисления операционной информации. Модуль 42 хранения операционной информации электрически соединяется с модулем 33 вычисления операционной информации.
[0361] Модуль 41 хранения информации распознавания может хранить информацию распознавания согласно конкретной операционной информации. Модуль 41 хранения информации распознавания электрически соединяется с модулем 42 хранения операционной информации.
[0362] Процесс распознавания посредством датчика 20, обработки информации и процесс вычисления посредством контроллера 30, и процесс сохранения информации в базе 40 данных могут выполняться в реальном времени.
[0363] Далее в данном документе способ регулирования длины выдвижения узла щетки чистящего блока согласно настоящему раскрытию будет описан подробно со ссылкой на фиг. 15-16.
[0364] Фиг. 15 является блок-схемой последовательности операций, иллюстрирующей последовательность операций способа управления чистящим блоком согласно настоящему раскрытию.
[0365] Когда пылесос работает на полу, датчик 20 обнаруживает значение тока первого силового модуля 13a (S10).
[0366] Первый силовой модуль 13a соединяется с перемешивателем 200, 300, 400, 500 пылесоса, чтобы вращать перемешиватель 200, 300, 400, 500. Перемешиватель 200, 300, 400, 500 соединяется с модулем 120 всасывающего сопла и подвергается воздействию окружающей обстановки пола, чтобы вращаться, когда модуль 120 всасывающего сопла скользящим образом движется в окружающей обстановке пола.
[0367] Когда модуль 120 всасывающего сопла перемещается посредством колесного модуля 160 от пола с предварительно определенным расстоянием. Когда пылесос движется по твердой поверхности пола, перемешиватель 200, 300, 400, 500, предусмотренный в модуле 120 всасывающего сопла, вращается на конкретном расстоянии от пола.
[0368] Когда пылесос перемещается с твердой поверхности пола на ковер, колесный модуль 160 утапливается на предварительно определенную глубину ковра, что предоставляет возможность перемешивателю 200, 300, 400, 500 располагаться ближе к ковру по сравнению с твердой поверхностью пола.
[0369] Соответственно, щеточный участок 230, 330, 430, 530 перемешивателя 200, 300, 400, 500 получает большее сопротивление по сравнению с твердой поверхностью пола, вынуждая большее количество тока протекать в первом силовом модуле 13a, который вращает перемешиватель 200, 300, 400, 500.
[0370] Значение тока, протекающего через первый силовой модуль 13a, может быть обнаружено посредством модуля 21 распознавания значения тока, включенного в датчик 20.
[0371] Когда модуль 21 распознавания значения тока обнаруживает значение тока, протекающего через первый силовой модуль 13a, контроллер 30 вычисляет операционную информацию с помощью значения тока первого силового модуля 13a (S20).
[0372] Значение тока первого силового модуля 13a, измеренное посредством модуля 21 распознавания значения тока, принимается модулем 32 приема информации распознавания контроллера 30, и модуль 33 вычисления операционной информации вычисляет операционную информацию с помощью значения тока, принятого модулем 32 приема информации распознавания.
[0373] Когда модуль 33 вычисления операционной информации вычисляет операционную информацию, второй силовой модуль 13b управляется на основе вычисленной операционной информации (S30).
[0374] Операционная информация, вычисленная модулем 33 вычисления операционной информации, передается модулю 31 управления работой, и второй силовой модуль 13b приводится в действие посредством модуля 31 управления работой согласно операционной информации.
[0375] Операционная информация включает в себя предоставление возможности второму силовому модулю 13b толкать вал 270 для приема вала в переднюю сторону с предварительно определенным давлением или предоставление возможности второму силовому модулю 13b тянуть участок 270 для приема вала в заднюю сторону с предварительно определенным давлением.
[0376] Процесс вычисления операционной информации модулем 33 вычисления операционной информации будет описан подробно со ссылкой на фиг. 16.
[0377] Фиг. 16 является блок-схемой последовательности операций, иллюстрирующей вариант осуществления этапа S20 на фиг. 15.
[0378] Значение тока первого силового модуля 13a вводится, чтобы предоставлять возможность контроллеру 30 вычислять операционную информацию с помощью значения тока (S201).
[0379] Значение тока первого силового модуля 13a передается модулю 32 приема информации распознавания контроллера 30, и модуль 33 вычисления операционной информации сравнивает его с предварительно определенным первым значением (S202).
[0380] Когда переданное значение тока меньше предварительно определенного первого значения, модуль 33 вычисления операционной информации вычисляет первую операционную информацию (S203).
[0381] Первое значение является заданным значением тока, протекающего в первом силовом модуле 13a, когда первый силовой модуль 13a приводится в действие на ковре. Когда предварительно определенное значение тока меньше первого значения, модуль 33 вычисления операционной информации определяет, что пылесос используется или эксплуатируется на твердой поверхности пола, а не на ковре.
[0382] Т.е., первая операционная информация включает в себя информацию, которая толкает участок 270 для приема вала в переднюю сторону с предварительно определенным давлением.
[0383] Первая операционная информация передается модулю 31 управления работой, и модуль 31 управления работой управляет вторым силовым модулем 13b, чтобы толкать участок 270 для приема вала в переднюю сторону с предварительно определенным давлением.
[0384] Когда переданное значение тока больше предварительно определенного первого значения, модуль 33 вычисления операционной информации вычисляет вторую операционную информацию (S204).
[0385] Первое значение является заданным значением тока, протекающего в первом силовом модуле 13a, когда первый силовой модуль 13a приводится в действие на ковре. Когда переданное значение тока больше первого значения, модуль 33 вычисления операционной информации определяет, что пылесос эксплуатируется на ковре.
[0386] Т.е., вторая операционная информация включает в себя информацию, предоставляющую возможность второму силовому модулю 13b тянуть участок 270, 370 для приема вала в заднюю сторону с предварительно определенным давлением таким образом, чтобы расширять радиус вращения щеточного участка 230, 330, 430, 530 перемешивателя 200, 300, 400, 500 во время вращения.
[0387] Т.е., вторая операционная информация передается модулю 31 управления работой, и модуль 31 управления работой управляет вторым силовым модулем 13b, чтобы тянуть регулирующий модуль 11b в заднюю сторону с предварительно определенным давлением.
[0388] Как описано выше, чистящий блок согласно настоящему раскрытию может быть использован в устройстве, которое автоматически эксплуатируется, таком как робот-пылесос, с тем, чтобы автоматически управляться, так что длина щеточного узла может быть расширена согласно условиям пола.
[0389] Расширение щеточного участка чистящего блока, включающего в себя перемешиватель 200, 300, 400, 500 согласно настоящему раскрытию не ограничивается выполнением посредством автоматического управления.
[0390] Вал 220, 320, 420, 520 может быть выполнен посредством механической конфигурации, соединенной с участком 270 для приема вала таким образом, чтобы толкаться или тянуться. Например, щеточный участок 230, 330, 430, 530 может быть механически расширен посредством пользовательского манипулирования кнопкой.
[0391] Хотя настоящее раскрытие описывается со ссылкой на предпочтительные варианты осуществления, различные модификации и улучшения придут на ум специалистам в области техники без отступления от идеи и рамок настоящего раскрытия, которые определены в последующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2003 |
|
RU2316992C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2003 |
|
RU2316245C2 |
| Всасывающая головка для пылесоса и беспроводной пылесос, содержащий всасывающую головку | 2022 |
|
RU2839927C1 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО И ЧИСТЯЩАЯ НАСАДКА, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ИСПОЛЬЗОВАНИЯ В ЧИСТЯЩЕМ УСТРОЙСТВЕ | 2021 |
|
RU2832877C1 |
| ВСАСЫВАЮЩАЯ ГОЛОВКА ДЛЯ ПРИМЕНЕНИЯ В ПЫЛЕСОСЕ | 2022 |
|
RU2824487C1 |
| ВСАСЫВАЮЩАЯ ГОЛОВКА И БЕСПРОВОДНОЙ ПЫЛЕСОС, СОДЕРЖАЩИЙ ВСАСЫВАЮЩУЮ ГОЛОВКУ | 2022 |
|
RU2839926C1 |
| НАСАДОЧНОЕ ПРИСПОСОБЛЕНИЕ С ЩЕТКОЙ И СКРЕБКОМ | 2014 |
|
RU2649260C2 |
| НАСАДОЧНОЕ ПРИСПОСОБЛЕНИЕ ЧИСТЯЩЕГО УСТРОЙСТВА ДЛЯ ОЧИСТКИ ПОВЕРХНОСТИ | 2014 |
|
RU2647449C2 |
| ЧИСТЯЩЕЕ УСТРОЙСТВО | 2022 |
|
RU2831445C2 |
| Щетка и установка для обработки транспортных средств | 2016 |
|
RU2720031C1 |
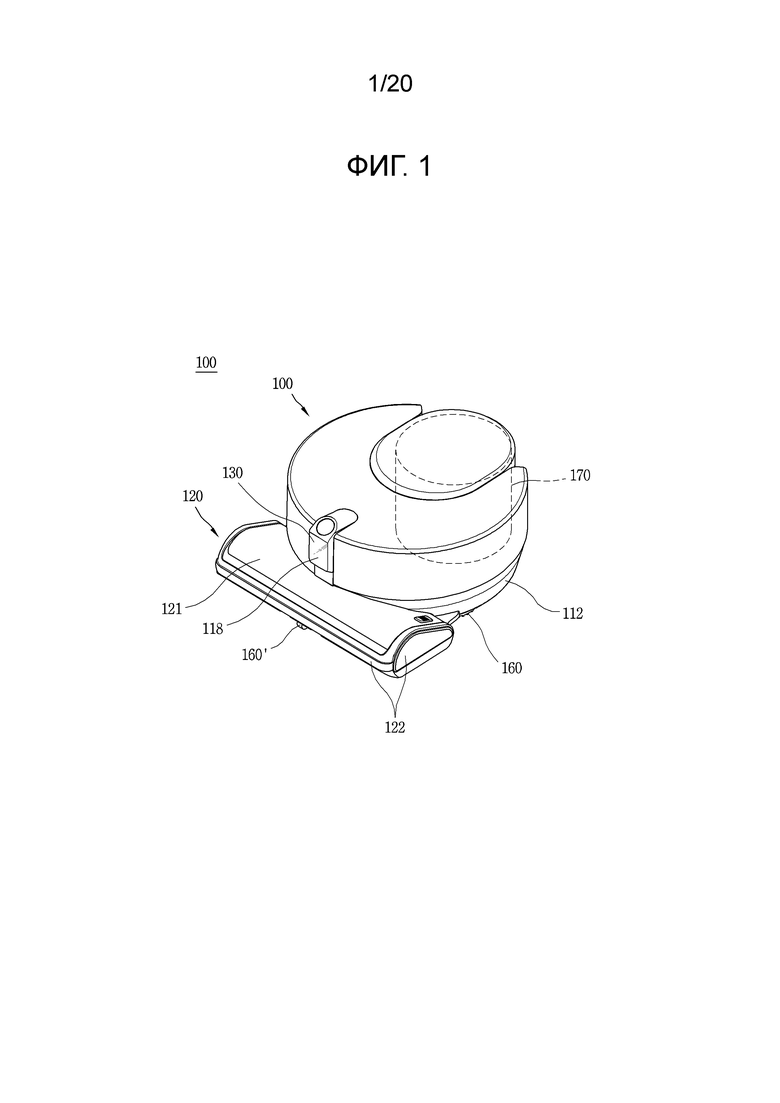
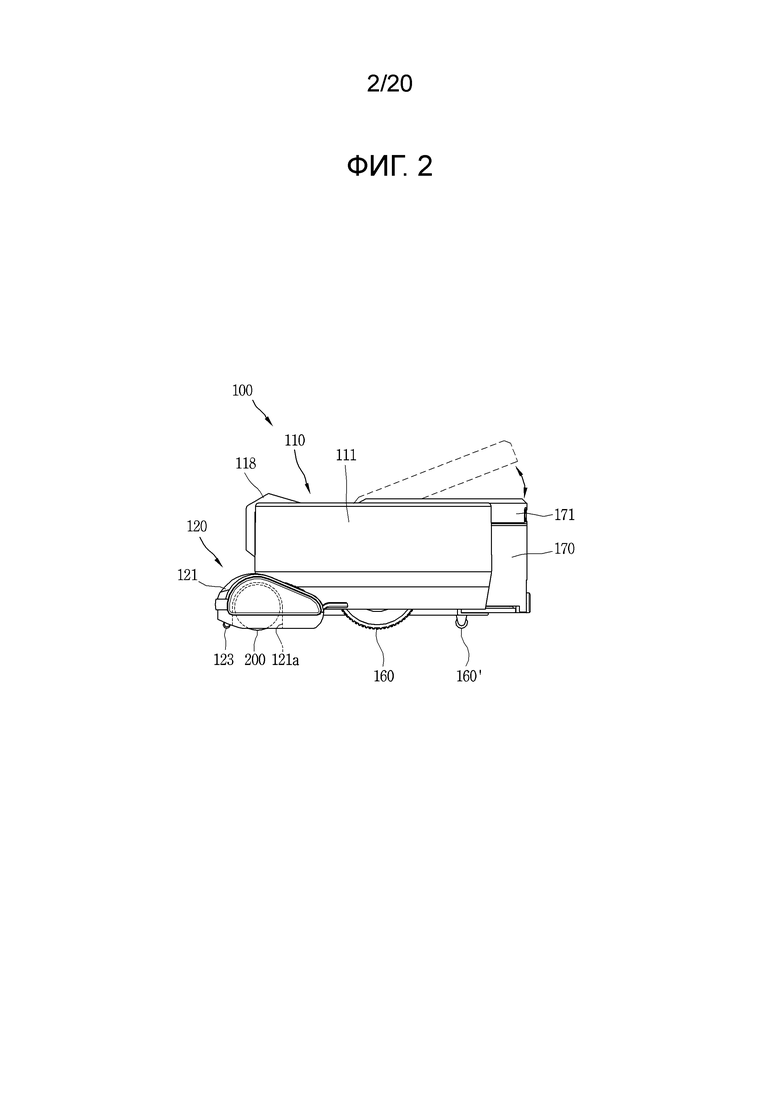
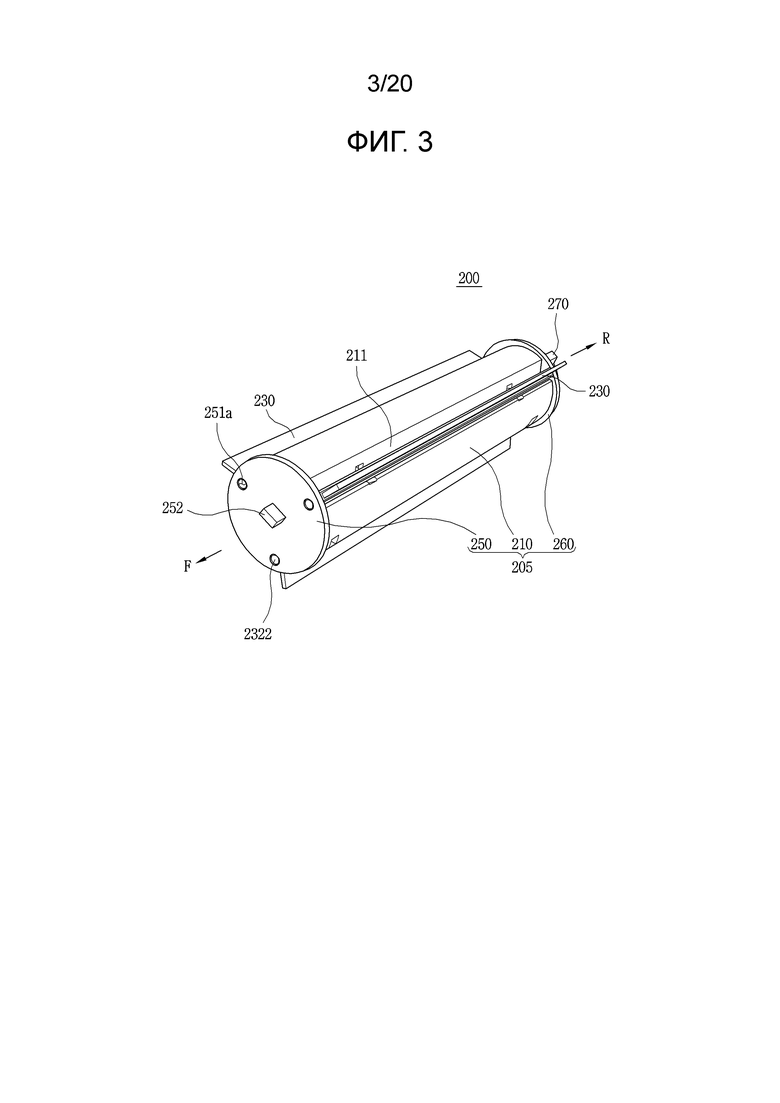
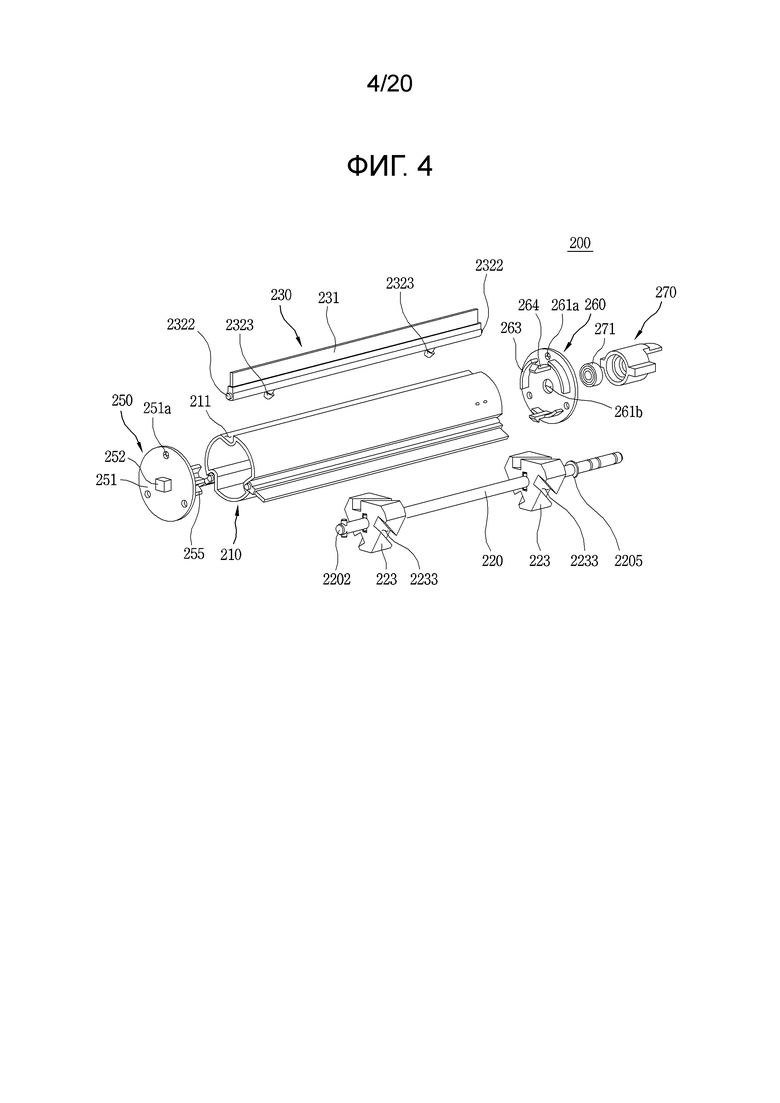
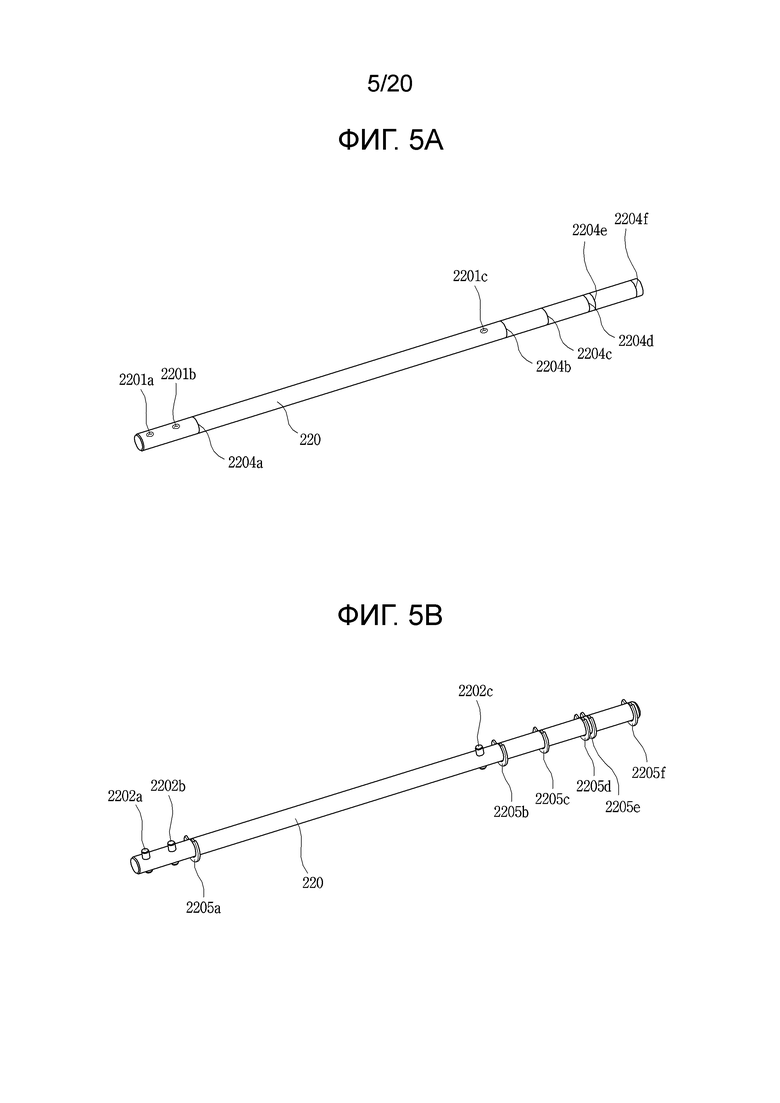
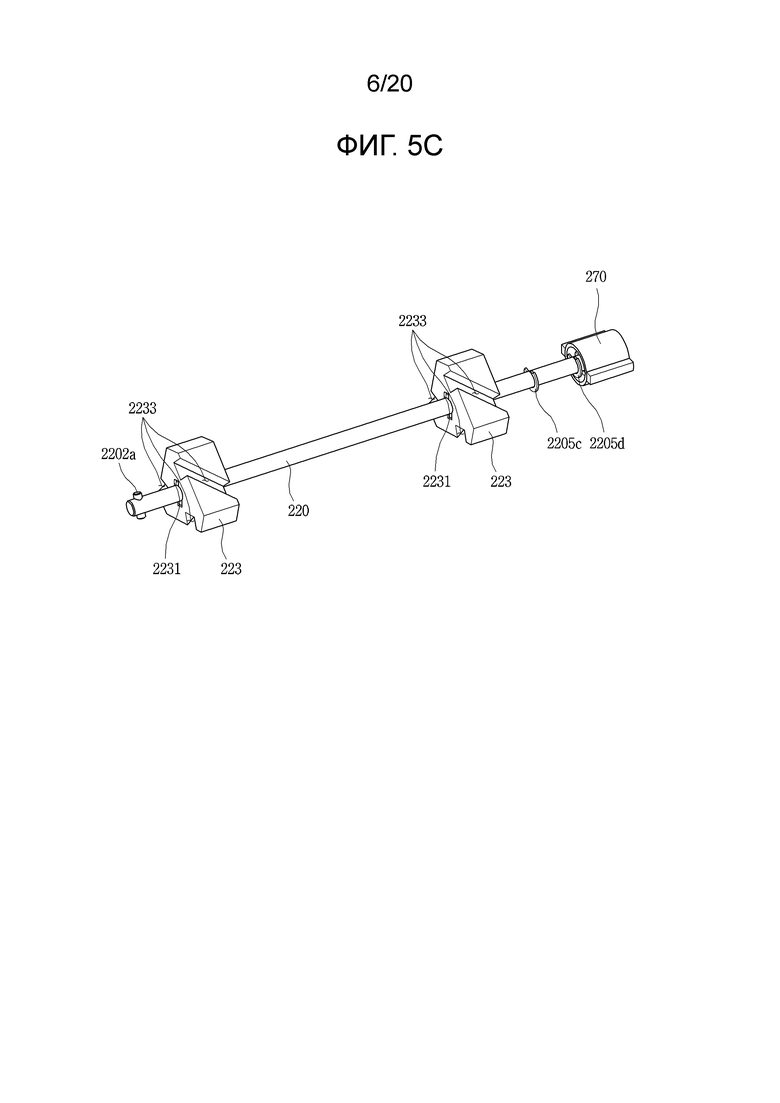
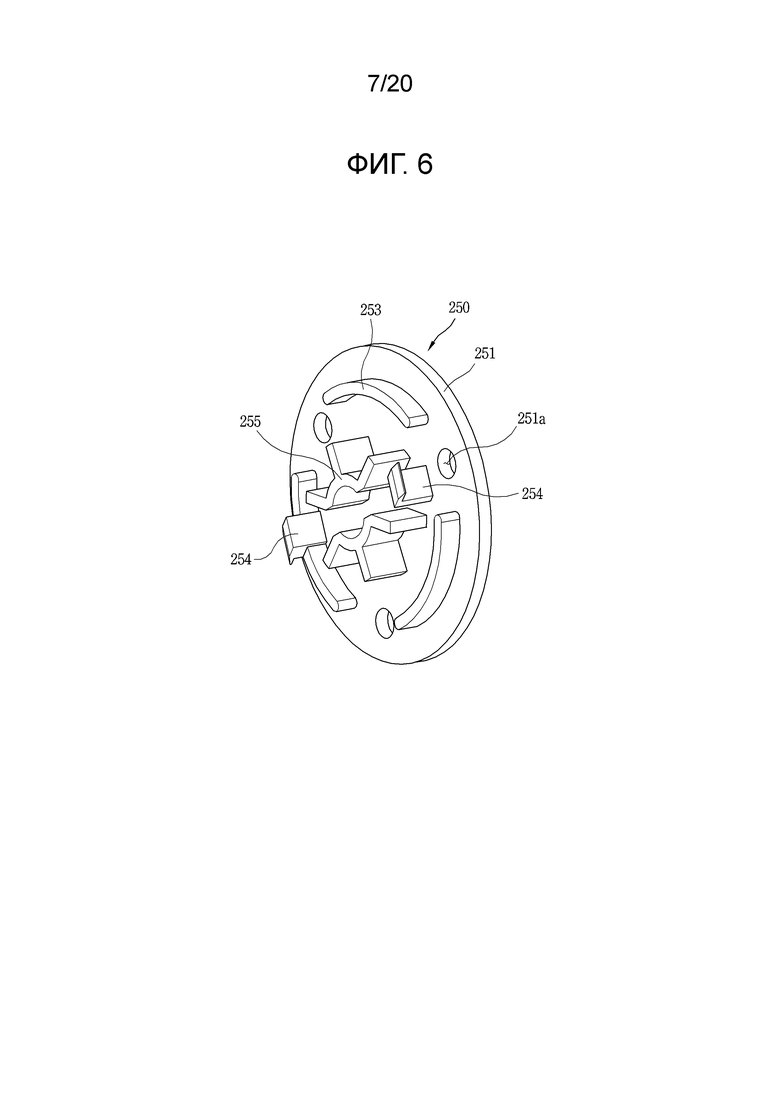
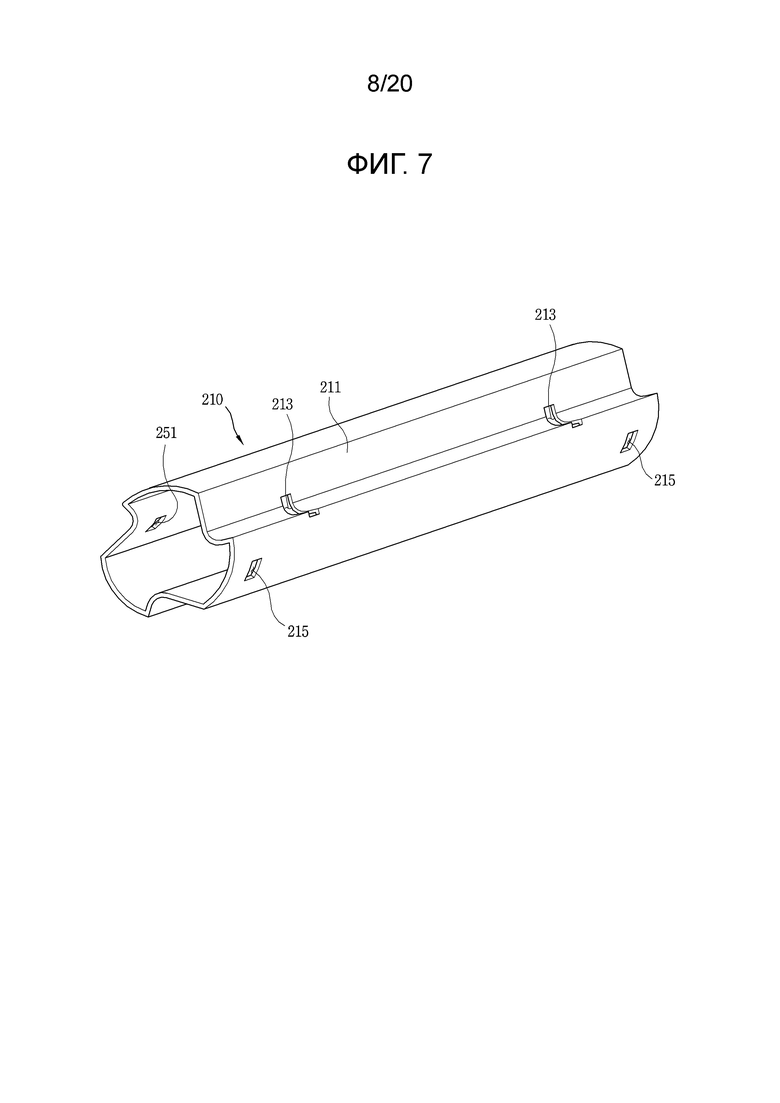
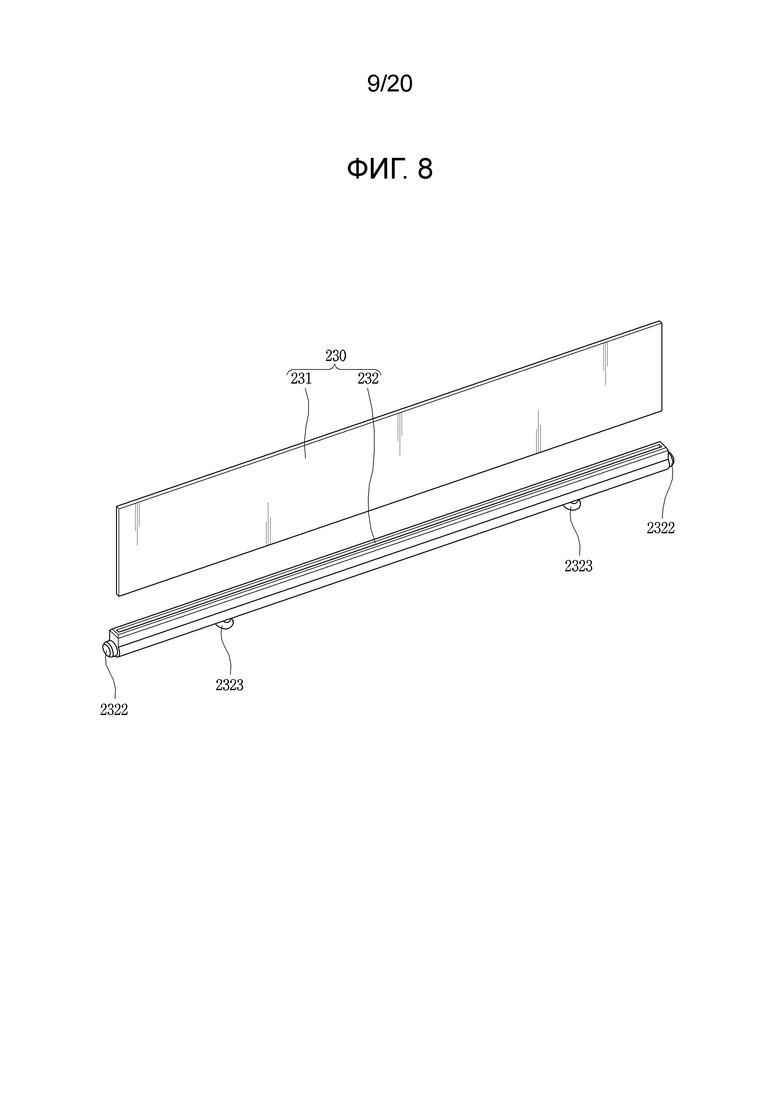
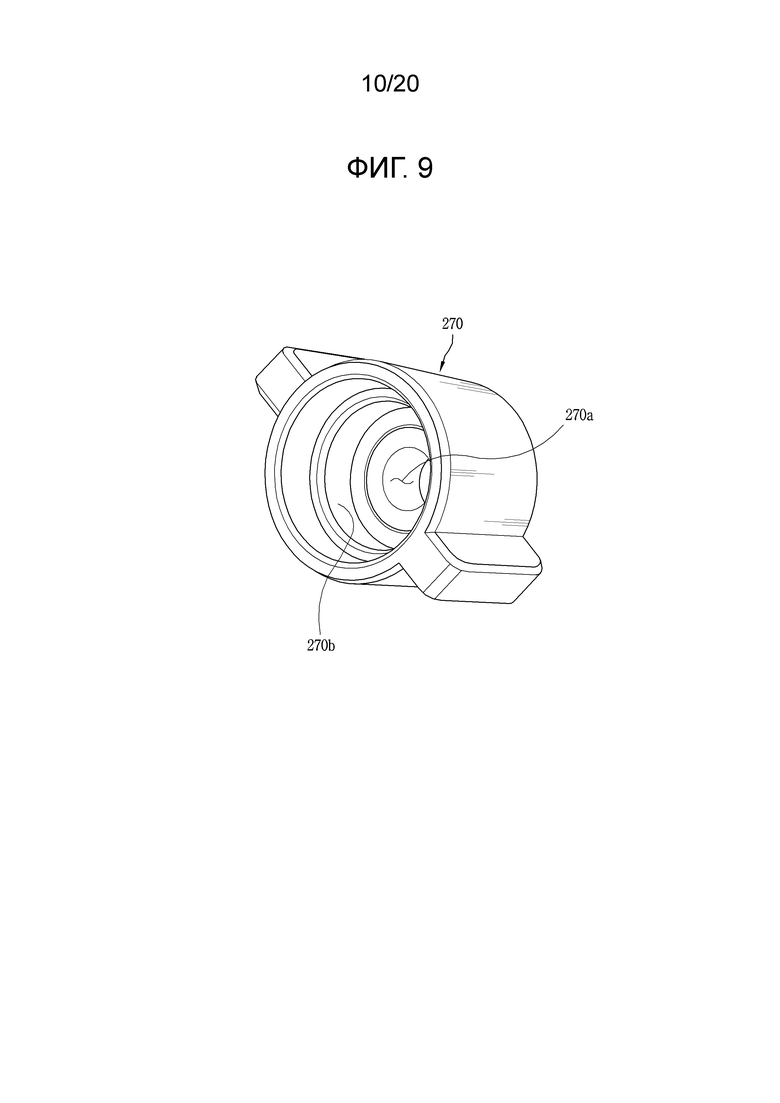
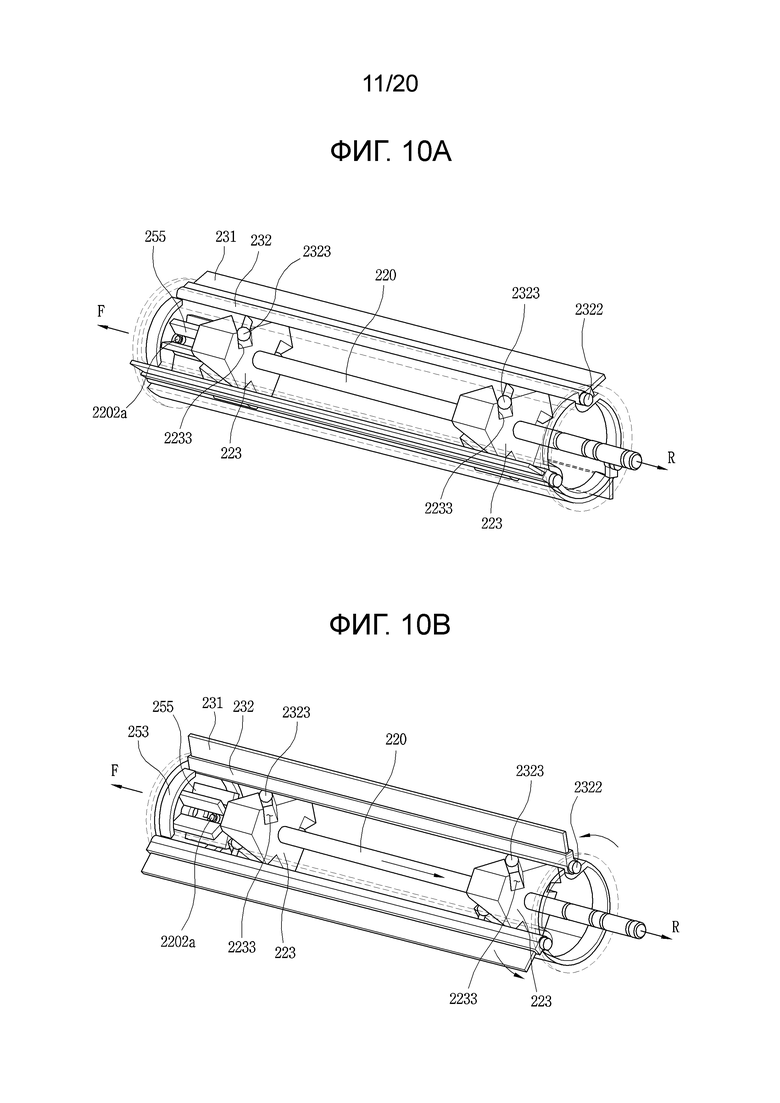
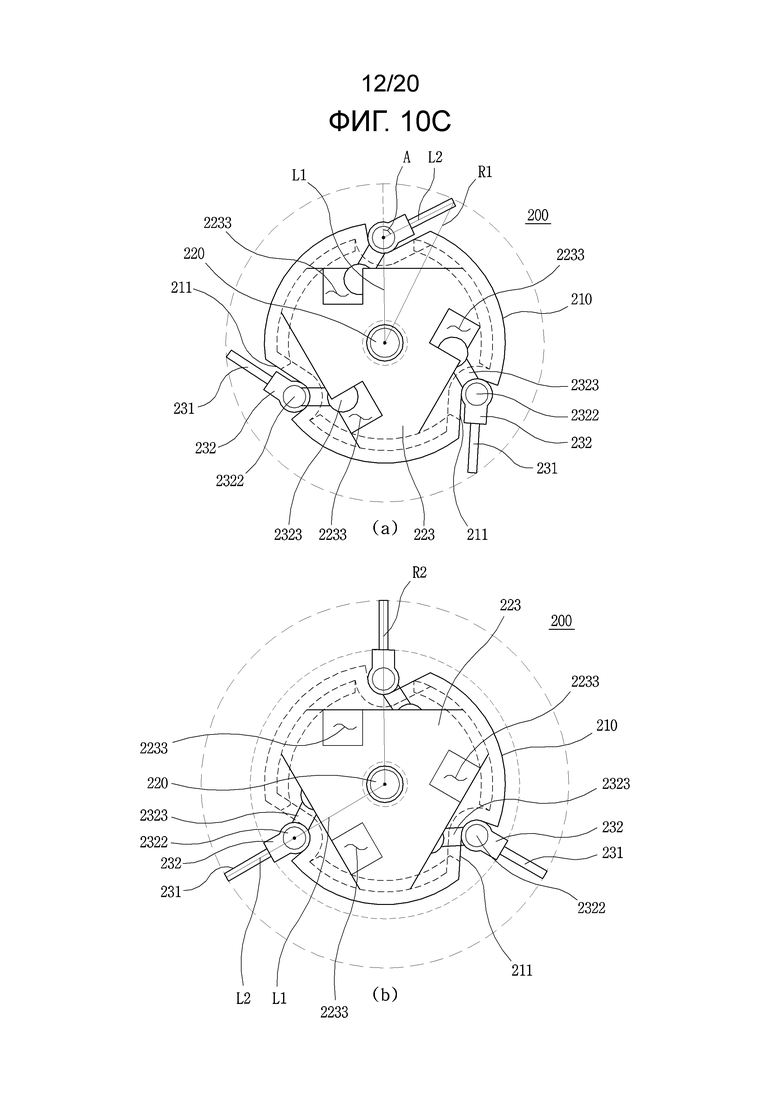
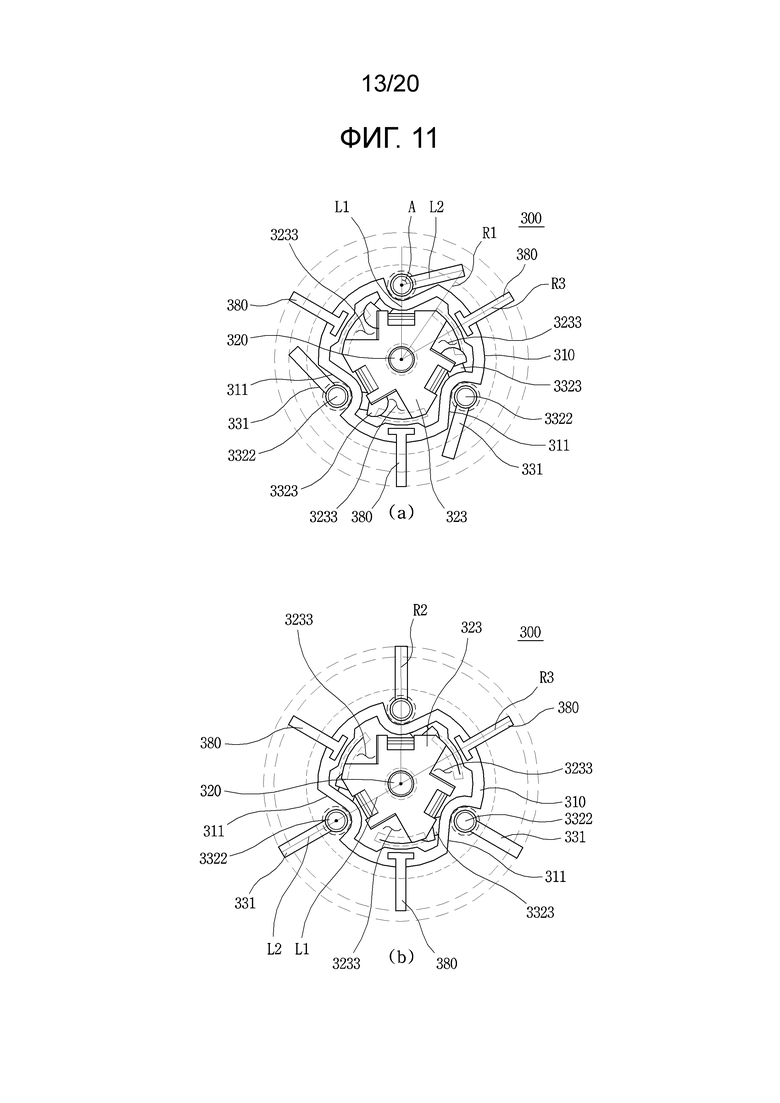
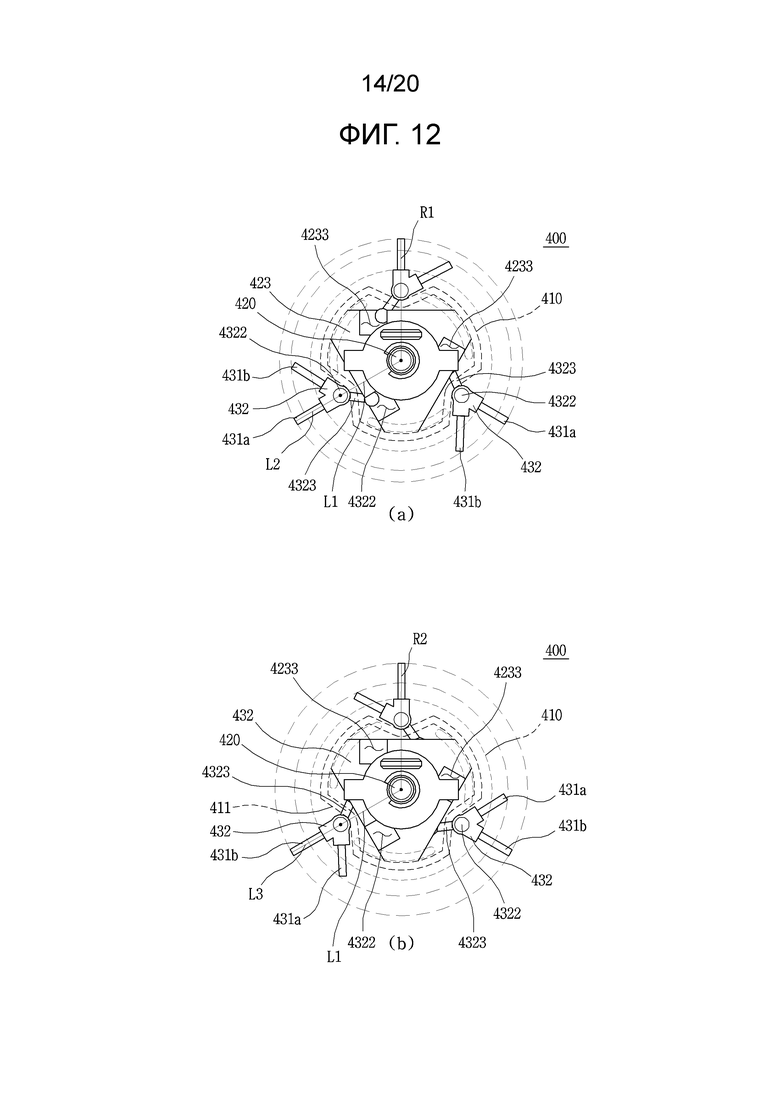
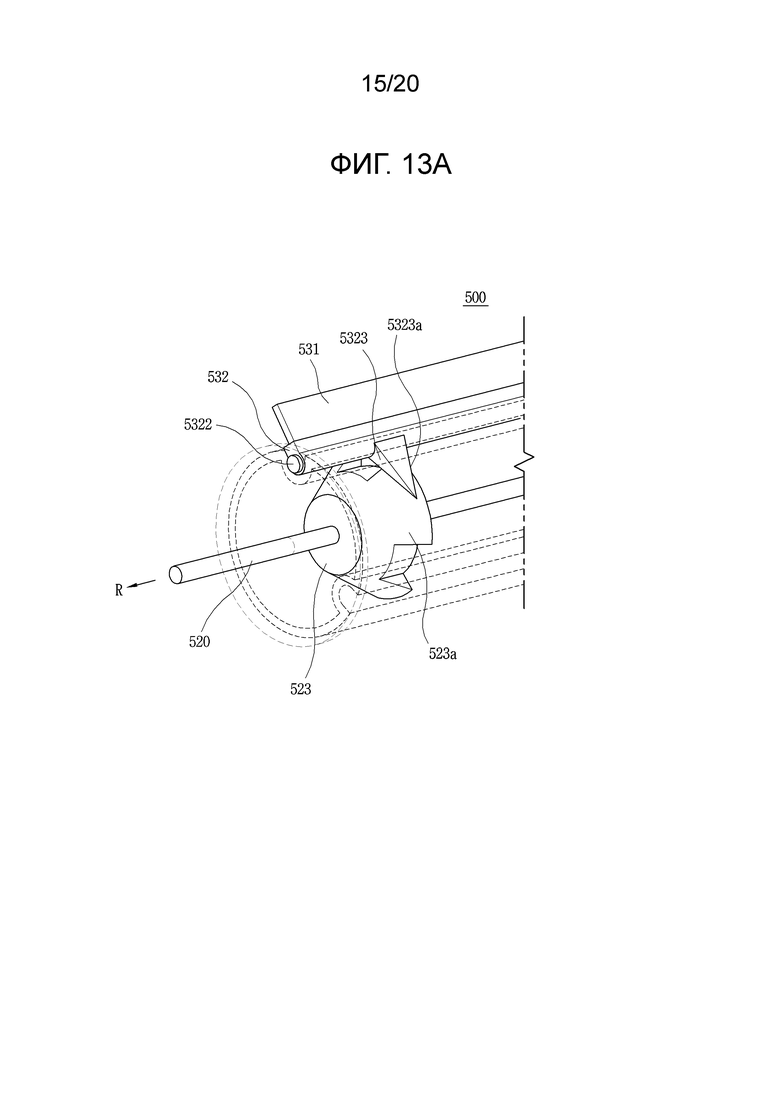
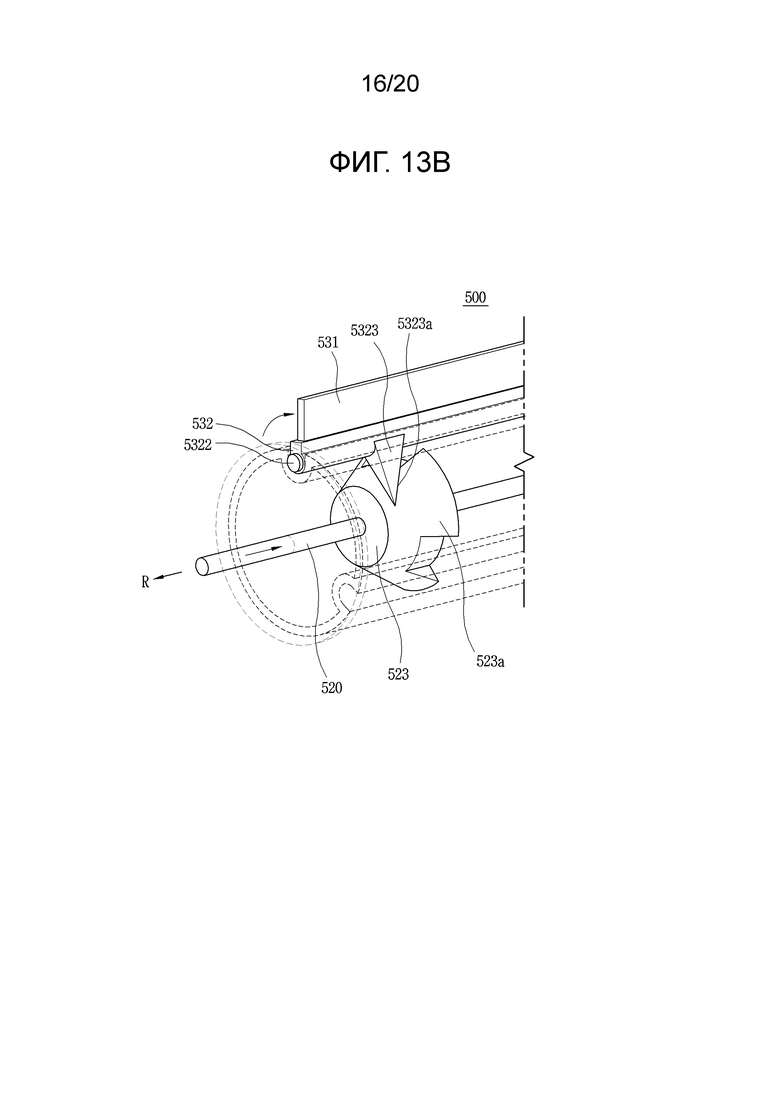
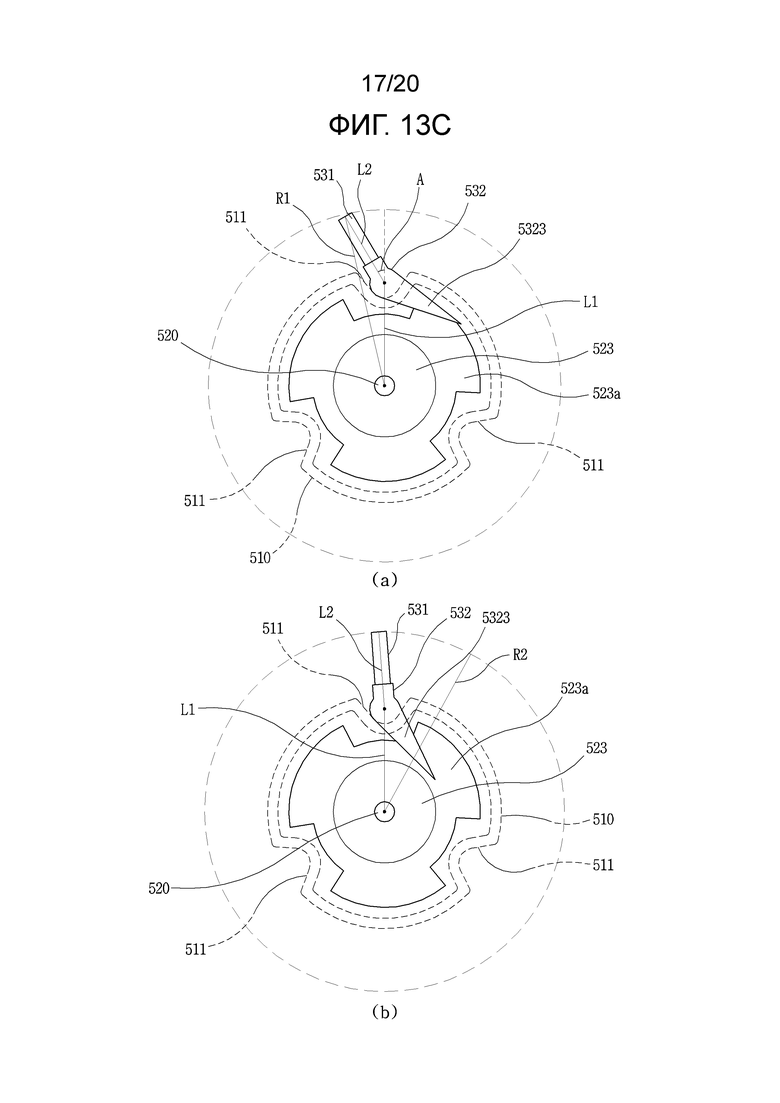
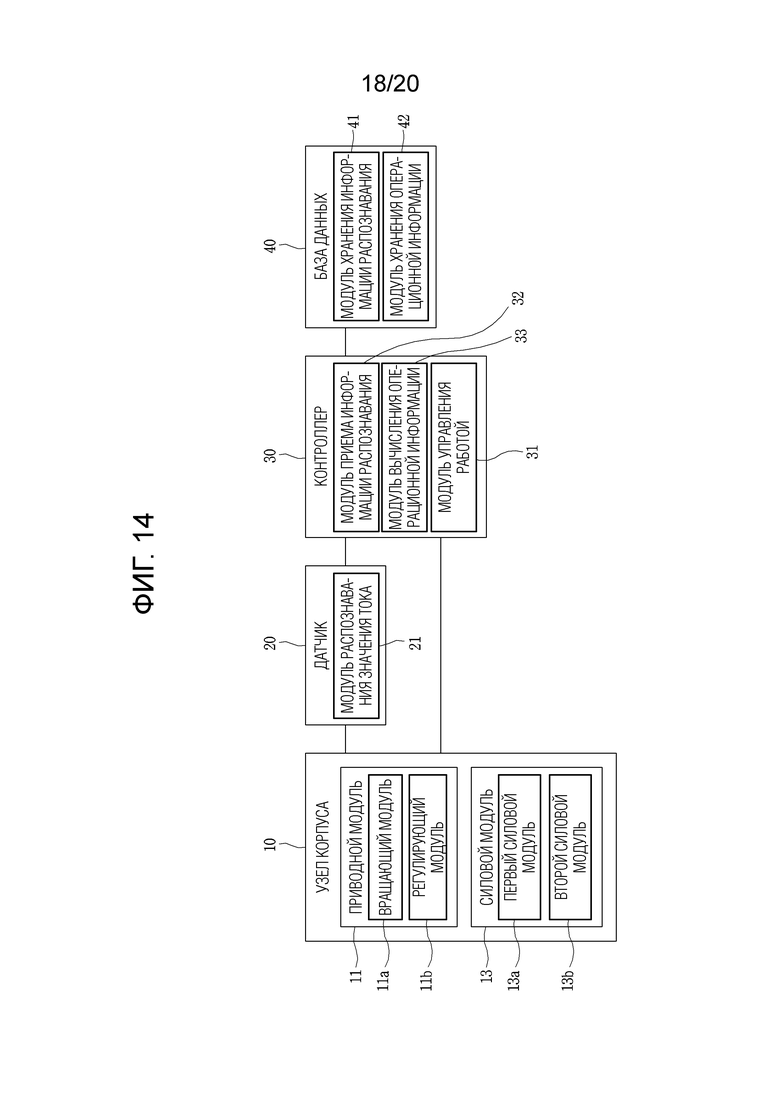
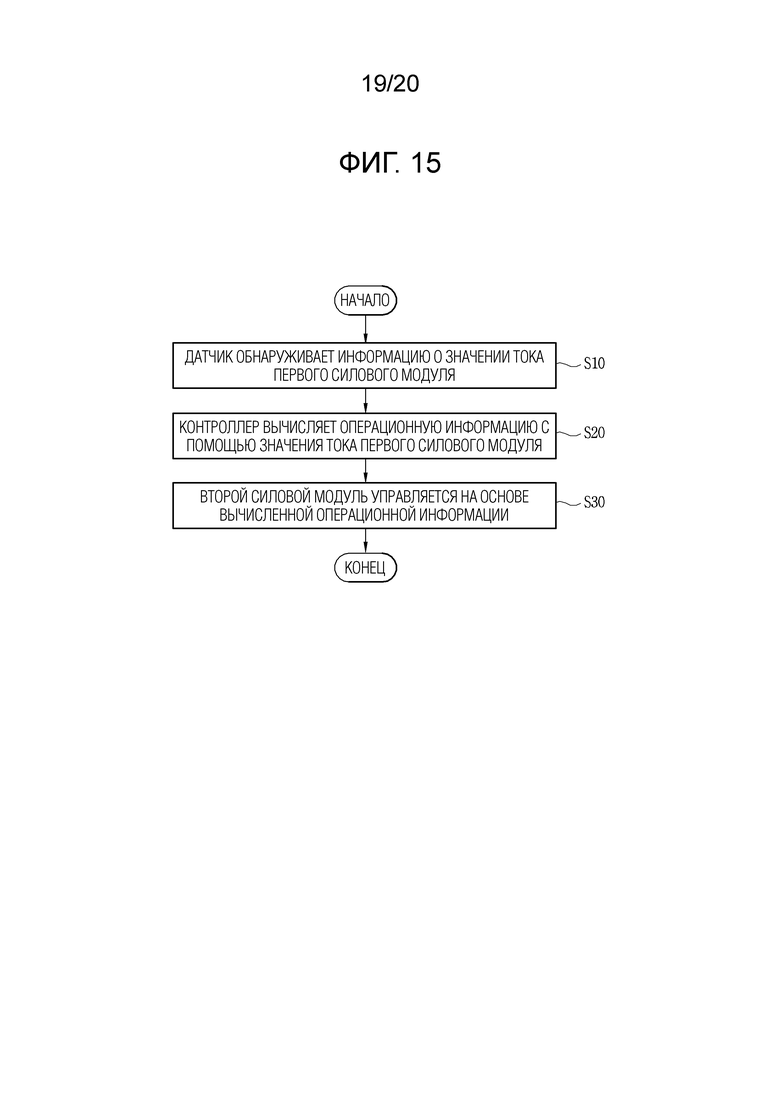
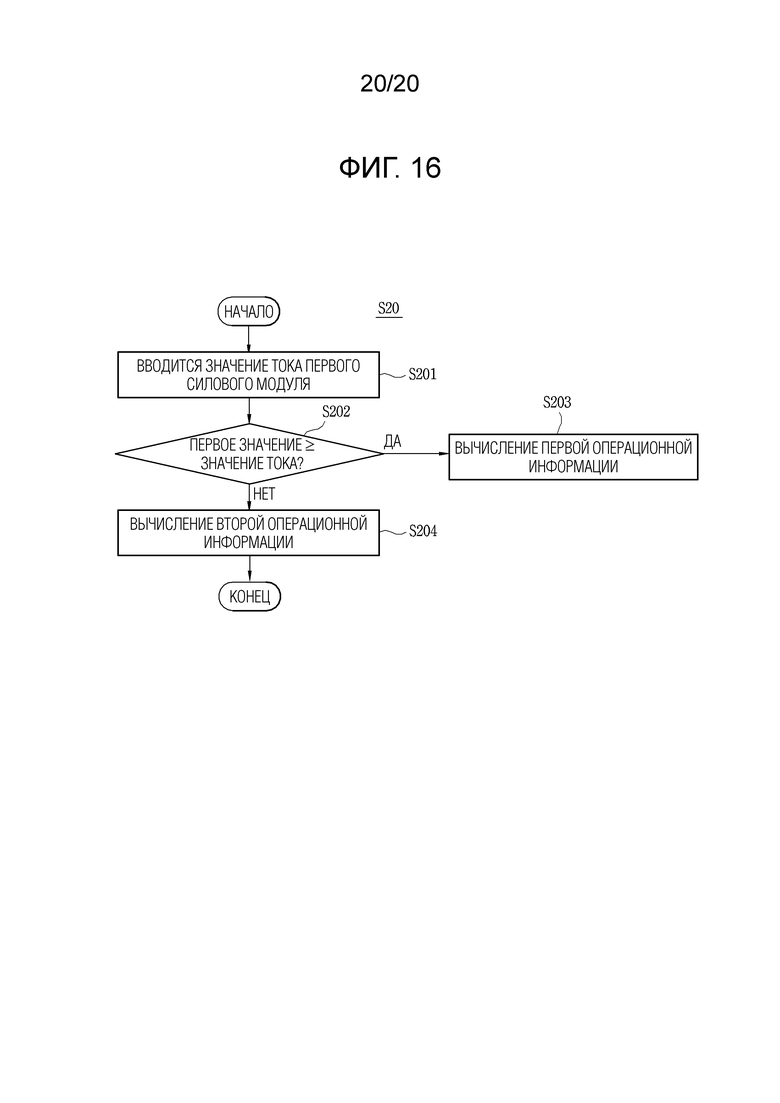
Группа изобретений относится к пылесосам с вакуумной чисткой. Чистящий блок содержит столбчатую корпусную часть, имеющую отверстие для направления вращения, сформированное на ее внешней круговой поверхности, вал, установленный, чтобы выполнять возвратно-поступательное движение на предварительно определенное расстояние в его продольном направлении в полости, сформированной в корпусной части, приводящую часть, которая выступает из вала в его радиальном направлении, щеточную часть, которая имеет одну сторону, установленную на внешней круговой поверхности корпусной части в ее продольном направлении, и вращается на основе одной стороны в качестве оси вращения, и приводимую часть, которая протягивается от щеточной части по направлению к приводящей части, проходит через отверстие для направления вращения и вставляется в паз для направления вращения, сформированный в приводящей части. Паз для направления вращения протягивается на предварительно определенный угол относительно продольного направления вала. Когда вал выполняет возвратно-поступательное движение, приводимая часть направляется, чтобы вращаться посредством паза для направления вращения, и щетка вращается посредством вращения приводимой части. Расширяются функциональные возможности, повышается удобство использования за счет автоматического регулирования положения щетки в зависимости от очищаемой поверхности. 2 н. и 15 з.п. ф-лы, 16 ил.
1. Чистящий блок пылесоса, содержащий:
столбчатую корпусную часть, в которой отверстие для направления вращения расположено на её внешней периферийной поверхности;
вал, предусмотренный, чтобы выполнять возвратно-поступательное движение на предварительно определенное расстояние в продольном направлении в полости, размещенной в корпусной части;
приводящий участок, выступающий из вала в радиальном направлении;
щеточный участок, имеющий одну сторону, предусмотренную на внешней периферийной поверхности корпусной части в продольном направлении для вращения с одной стороной в качестве своей оси вращения, причем одна сторона щеточного участка, предусмотренная на внешней периферийной поверхности корпусной части, включает один конец щеточного участка; и
приводимый участок, проходящий от щеточного участка по направлению к приводящему участку, чтобы вставляться в паз для направления вращения, расположенный в приводящем участке через отверстие для направления вращения,
при этом паз для направления вращения проходит под предварительно определенным углом относительно продольного направления вала, и
при этом, когда вал выполняет возвратно-поступательное движение, приводимый участок направляется во вращение посредством паза для направления вращения, и щеточный участок вращается посредством вращения приводимого участка.
2. Чистящий блок пылесоса по п. 1, дополнительно снабженный множеством щеточных участков и приводимых участков, проходящих от щеточного участка, размещенных в корпусной части в круговом направлении, и множеством пазов для направления вращения, размещенных на приводящем участке в круговом направлении.
3. Чистящий блок пылесоса по п. 2, дополнительно снабженный множеством приводящих участков, размещенных в продольном направлении на валу, при этом множество приводящих участков размещено в продольном направлении щеточного участка.
4. Чистящий блок пылесоса по п. 1, в котором расстояние между валом и другим концом щеточного участка становится минимальным, когда вал максимально перемещается по направлению к одной стороне корпусной части, и становится максимальным, когда вал максимально перемещается по направлению к другой стороне, противоположной упомянутой одной стороне.
5. Чистящий блок пылесоса по п. 1, в котором чистящий блок дополнительно содержит закрепленный щеточный участок, проходящий радиально наружу от внешней периферийной поверхности корпусной части,
при этом расстояние между валом и другим концом щеточного участка разнесено на первый радиус вращения, который является минимальным значением, когда вал максимально перемещается по направлению к одной стороне корпусной части, и разнесен на второй радиус вращения, который является максимальным значением, когда вал максимально перемещается по направлению к другой стороне, противоположной упомянутой одной стороне, и
при этом расстояние между валом и крайним участком радиально внешней стороны закрепленного щеточного участка больше первого радиуса вращения и меньше второго радиуса вращения.
6. Чистящий блок пылесоса по п. 1, в котором щеточный участок содержит первую щетку и вторую щетку, соответственно проходящие от одной стороны щеточного участка в радиально внешнюю сторону корпусной части, и
при этом первая щетка и вторая щетка формируют предварительно определенный угол друг с другом, и длины в направлении протяжения первой щетки и второй щетки отличаются друг от друга.
7. Чистящий блок пылесоса по п. 1, в котором корпусная часть содержит:
полый корпусный элемент, размещенный с утопленным пазом, на котором щеточный участок обеспечивается на его внешней периферийной поверхности, оба конца которого являются открытыми; и
первую концевую крышку и вторую концевую крышку, соответственно установленные на обоих концах корпусного элемента, чтобы закрывать оба конца, соответственно.
8. Чистящий блок пылесоса по п. 7, в котором одна сторона щеточного участка размещена в утопленном пазу,
при этом вращающиеся выступы размещены на обоих концах одной стороны щеточного участка в продольном направлении, и
при этом первая концевая крышка и вторая концевая крышка снабжены приемными отверстиями, выполненными с возможностью вращения вращающихся выступов.
9. Чистящий блок пылесоса по п. 7, в котором вал содержит шип для передачи мощности, проходящий через одну сторону вала, и
при этом первая концевая крышка содержит участок для направления вала, присоединенный с возможностью скольжения к одной стороне вала.
10. Чистящий блок пылесоса по п. 9, в котором отверстие для направления вала, выполненное с возможностью скольжения вала, размещено во второй концевой крышке, и
при этом вал содержит по меньшей мере одно Е-образное кольцо, выступающее в радиальном направлении, при этом вторая концевая крышка расположена между Е-образными кольцами, чтобы ограничивать расстояние возвратно-поступательного перемещения вала.
11. Чистящий блок пылесоса по п. 10, в котором чистящий блок дополнительно содержит участок для приема вала, установленный на другой стороне вала,
при этом подшипник вставлен между участком для приема вала и валом, и
при этом участок для приема вала размещен между Е-образными кольцами, чтобы закреплять участок для приема вала в продольном направлении.
12. Чистящий блок пылесоса по п. 11, в котором чистящий блок дополнительно содержит:
первый силовой модуль, присоединенный к первой концевой крышке для вращения вала;
второй силовой модуль, соединенный с участком для приема вала, чтобы толкать и тянуть участок для приема вала согласно операционной информации;
датчик, соединенный с первым силовым модулем и выполненный с возможностью обнаружения значения тока первого силового модуля; и
контроллер, который вычисляет операционную информацию, который электрически соединен со вторым силовым модулем, чтобы передавать вычисленную операционную информацию второму силовому модулю, и электрически соединен с датчиком, чтобы принимать значение тока первого силового модуля, которое обнаружено датчиком, и
при этом контроллер вычисляет операционную информацию с помощью обнаруженного значения тока первого силового модуля.
13. Чистящий блок пылесоса по п. 12, при этом операционная информация содержит первую операционную информацию и вторую операционную информацию,
при этом второй силовой модуль принимает первую операционную информацию, чтобы толкать участок для приема вала с предварительно определенным давлением, и принимает вторую операционную информацию, чтобы тянуть участок для приема вала с предварительно определенным давлением, и
при этом контроллер вычисляет первую операционную информацию, когда обнаруженное значение тока первого силового модуля больше или равно первому значению, и вычисляет вторую операционную информацию, когда обнаруженное значение тока первого силового модуля меньше первого значения.
14. Чистящий блок пылесоса, содержащий:
столбчатую корпусную часть, в которой отверстие для направления вращения расположено на её внешней периферийной поверхности;
вал, предусмотренный, чтобы выполнять возвратно-поступательное движение на предварительно определенное расстояние в продольном направлении в полости, размещенной в упомянутом корпусе;
приводящий участок, выступающий из вала в радиальном направлении и имеющий внешнюю периферийную поверхность, наклоненную радиально наружу в продольном направлении;
щеточный участок, имеющий одну сторону, предусмотренную на внешней периферийной поверхности корпусной части в продольном направлении для вращения с одной стороной в качестве своей оси вращения; и
приводимый участок, проходящий от щеточного участка в корпусную часть через отверстие для направления вращения,
при этом приводимый участок имеет наклоненный участок, контактирующий с внешней периферийной поверхностью, и
при этом, когда вал выполняет возвратно-поступательное движение, приводимый участок вращается посредством внешней периферийной поверхности, и щеточный участок вращается посредством вращения приводимого участка.
15. Чистящий блок пылесоса по п. 14, в котором щеточный участок и приводимый участок, проходящий от щеточного участка, расположены во множественном количестве в круговом направлении корпусной части.
16. Чистящий блок пылесоса по п. 15, в котором приводящий участок расположен во множественном количестве в продольном направлении на валу, и
при этом приводящий участок расположен во множественном количестве в продольном направлении щеточного участка.
17. Чистящий блок пылесоса по п. 14, в котором расстояние между валом и другим концом щеточного участка становится минимальным, когда вал максимально перемещается по направлению к одной стороне корпусной части, и становится максимальным, когда вал максимально перемещается по направлению к другой стороне, противоположной упомянутой одной стороне.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| УЗЕЛ ЩЕТКИ ДЛЯ ПЫЛЕСОСА | 2005 |
|
RU2308213C2 |
| ВСАСЫВАЮЩАЯ ЩЕТКА ДЛЯ ПЫЛЕСОСА | 2008 |
|
RU2370199C1 |
| ВСАСЫВАЮЩАЯ ЩЕТКА ДЛЯ ПЫЛЕСОСА | 2008 |
|
RU2463945C2 |
| US 20090049642 A1, 26.02.2009 | |||
| CN 106539534 A, 29.03.2017 | |||
| JP 5056889 A, 09.03.1993 | |||
| JP 2018061682 A1, 19.04.2018. | |||

