Родственные заявки
Настоящая заявка испрашивает приоритет по дате подачи Предварительной патентной заявки США № 61/387043, поданной 28 сентября 2010 г., которая включена в настоящий документ посредством ссылки.
Уровень техники
Настоящие варианты осуществления относятся к дистанционному обслуживанию подвижных составов. Информация о подвижном составе, таком как поезда или грузовые автомобили, контролируется для идентификации проблем или инцидентов, которые могут потребовать обслуживания.
При выполнении типичного обслуживания по техническому состоянию контролируемые единицы оснащаются рядом датчиков и устройств отправки сообщений. В подвижных составах система управления, расположенная на поезде или грузовых автомобилях, постоянно контролирует первичные показания датчиков и формирует сообщения (например, предупреждения) в случае, если показания датчиков ниже или выше заранее заданных порогов. Каждое сформированное сообщение имеет код, который определяет серьезность проблемы и подсистему единицы, к которой применимо сообщение. Кроме того, каждое сообщение имеет метку времени, соответствующую тому времени, когда возникла проблема или предупреждение. Сообщения и показания датчиков регулярно передаются с поезда на станцию контроля.
Диспетчеры парка используют сообщения и показания датчиков для получения общего представления о том, как функционирует парк транспортных средств, и принятия мер (например, выпуска приказов об обслуживании или ремонте). Данные накапливаются и постоянно анализируются. Сообщения о диагностике по всем единицам парка транспортных средств поступают на станцию контроля с высокой скоростью и в большом объеме. Диспетчеры сталкиваются с трудоемкой задачей ручной фильтрации и группирования различных сообщений и информации от датчиков с целью идентификации фактических событий или событий, требующих последующего действия. При наличии больших парков транспортных средств идентификация событий становится еще более сложной. Некоторые из событий или показаний датчиков могут являться всего лишь нарушениями нормального функционирования, связанными с ожидаемыми событиями или не представляющими интереса по иным причинам.
Для облегчения анализа к данным применяется набор бизнес-правил или статистических моделей, сведения о которых были получены с использованием имеющихся хронологических данных. Однако эти правила или модели могут неточно группировать информацию, приводя к дополнительной работе диспетчеров.
Сущность изобретения
В различных вариантах осуществления предлагаются системы, способы и машиночитаемые носители информации для адаптивного дистанционного обслуживания подвижных составов. Существующие правила или модели автоматически обновляются или адаптируются. Для установления более эффективного набора правил применяется машинное обучение. Правила могут заменяться, обобщаться или иным образом адаптироваться на основе взаимодействия диспетчеров с результатами действующих правил. Принятие или отклонение события диспетчером используется в качестве наземного контроля данных для управляемого машинного обучения новому правилу. Машинное обучение использует обратную связь с пользователем для обновления набора правил.
В первом варианте предлагается способ адаптивного дистанционного обслуживания подвижных составов. Осуществляется прием диагностической информации по функционированию подвижного состава. Процессор идентифицирует множество событий на основе множества действующих правил, применяемых к диагностической информации. Действующие правила и соответствующие события относятся к инцидентам при обслуживании подвижного состава. Осуществляется прием информации о распределении, показывающей распределение событий по отношению к соответствующим действующим правилам. Распределение соответствует подтверждению события и исключению события. Процессор применяет управляемое машинное обучение к диагностической информации с использованием подтверждения события и исключения события в качестве информации наземного контроля данных. В результате применения управляемого обучения выдается новое правило. Новое правило отличается от любого из действующих правил.
Во втором варианте предлагается система для адаптивного дистанционного обслуживания подвижных составов. По меньшей мере, одно запоминающее устройство выполнено с возможностью хранения сообщений и информации от датчиков подсистем парка поездов. Процессор выполнен с возможностью приема информации о выполнении для применения существующего правила для идентификации первого типа события для парка поездов по сообщениям, информации от датчиков либо по сообщениям и информации от датчиков. Процессор также выполнен с возможностью изучения нового правила, идентифицирующего первый тип события для парка поездов по сообщениям, информации от датчиков либо по сообщениям и информации от датчиков. Новое правило имеет ограничение по времени, ограничение по периодичности либо ограничения по времени и периодичности для сообщений, информации от датчиков либо сообщений и информации от датчиков, отличных от существующего правила.
В третьем варианте долговременный машиночитаемый носитель информации сохраняет в себе данные, представляющие собой команды, исполняемые программируемым процессором для адаптивного дистанционного обслуживания подвижных составов. Носитель информации содержит команды для приема данных, представляющих собой происшествия, обнаруживаемые подвижным составом, фиксирования действий пользователя в отношении событий, запускаемых применением к данным существующих правил, и изучения процессором последующего правила по результатам фиксирования и по данным.
Любой один или более из вышеописанных вариантов могут использоваться сами по себе или в совокупности. Эти и другие варианты, признаки и преимущества станут понятными из нижеследующего подробного описания предпочтительных вариантов осуществления, которое следует читать применительно к прилагаемым чертежам. Настоящее изобретение определяется нижеследующей формулой изобретения, при этом ничто в данном разделе не должно приниматься в качестве ограничения этой формулы изобретения. Дополнительные варианты и преимущества изобретения описываются ниже применительно к предпочтительным вариантам осуществления и могут ниже быть заявлены по отдельности или вместе.
Краткое описание чертежей
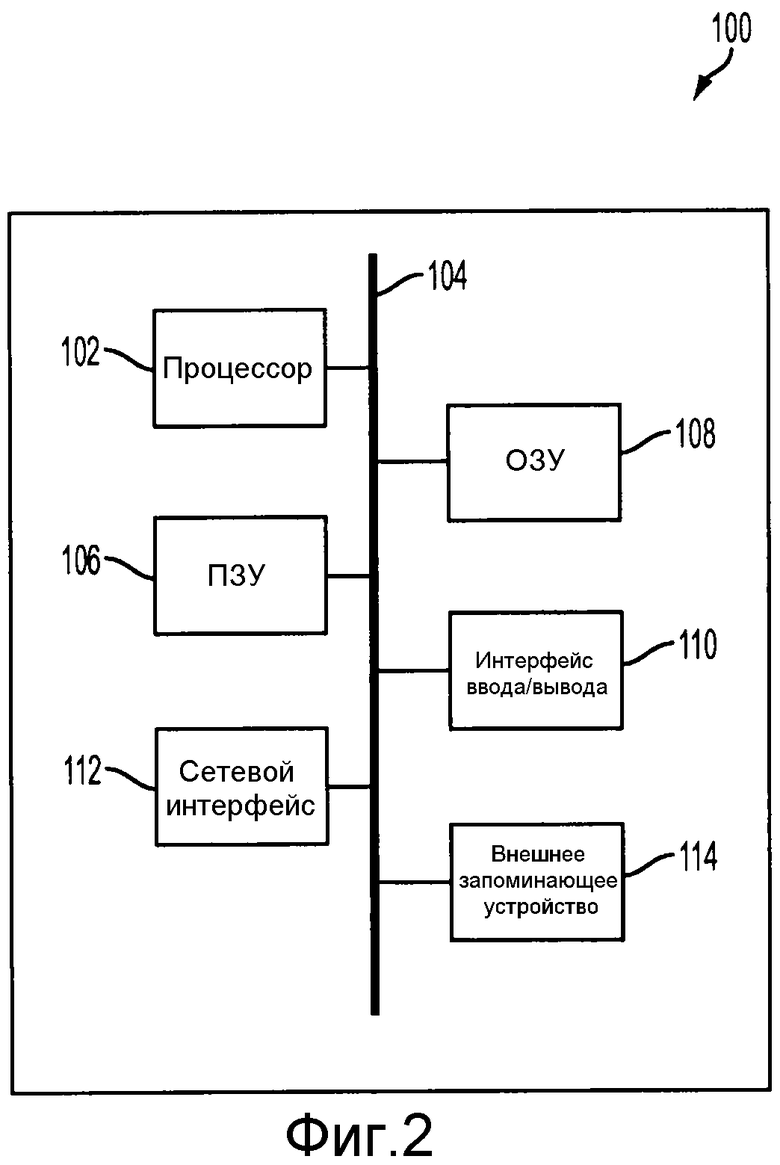
Фиг.1 представляет собой блок-схему одного варианта осуществления способа адаптивного дистанционного обслуживания подвижных составов; и
фиг.2 представляет собой блок-схему одного варианта осуществления системы адаптивного дистанционного обслуживания подвижных составов.
Подробное описание вариантов осуществления
Предлагается адаптивный механизм формирования правил для дистанционного обслуживания подвижных составов. К подвижным составам относится любое транспортное средство с двигателем или без него либо вагон, работающий на железной дороге. Например, локомотивы, грузовые вагоны, пассажирские вагоны и товарные вагоны являются подвижным составом. В других вариантах осуществления к подвижным составам относятся работающие на дорогах грузовые автомобили.
Правила применяются к данным из подвижного состава для идентификации любых проблем с обслуживанием или содержанием. Сообщения и информации от датчиков накапливаются от контролируемых единиц, таких как любое транспортное средство подвижного состава, или субъединиц, таких как часть транспортного средства подвижного состава (например, подсистема охлаждения). В качестве входных данных правилами используются поступающие в реальном времени или хранящиеся в памяти сообщения, потоки информации с датчиков и выходные события. События представляют собой группы принимаемых данных, позволяющие диспетчеру эффективнее управлять обслуживанием, не рассматривая по отдельности различные принимаемые данные по одному и тому же инциденту. Например, сообщение о потере сигнала с холодильного агрегата и сообщение о показании повышенной температуры обнаруживаются и отправляются независимо друг от друга, но связаны с одним и тем же событием - поломкой холодильного агрегата. Некоторые правила могут некорректно генерировать события, пропуская события, идентифицируя ложные события или не включая полную группу данных для определенного события.
Чтобы избежать неэффективности из-за некорректной идентификации событий, система обслуживания по техническому состоянию для подвижных составов автоматически адаптирует существующие задаваемые экспертом бизнес-правила и изучает новые, более точные правила на основе диагностических сообщений и информации от датчиков. Обратная связь с пользователем обрабатывается для адаптации задаваемых пользователем правил, повышения их точности, рекомендации изменений и даже предложения новых правил, не входящих в первоначальный набор правил.
На фиг.1 показан способ адаптивного дистанционного обслуживания подвижных составов. Данный способ реализуется с помощью или на компьютере, сервере, процессоре или ином устройстве, таком как изображенное на фиг.2. Данный способ предусматривается в показанном порядке, но может предусматриваться и иной порядок. Могут предусматриваться дополнительные или иные шаги либо меньшее число шагов. Вместо того, чтобы выполнять шаг 24 и шаг 26 в реальном времени с приемом данных на шаге 22, или вместо того, чтобы генерировать информацию в реальном времени, данный способ выполняется по хронологическим данным. В другом примере на шаге 30 новое правило, скорее, используется, чем выдается.
На шаге 22 принимается диагностическая информация по подвижному составу. Диагностическую информацию принимает база данных, компьютер, процессор или иное устройство. Прием осуществляется беспроводным или проводным способом. Например, подвижной состав является удаленным, но находится на некоторой станции. Сброс данных с каждого поезда осуществляется в различное время или в различном месте, например, в случаях, когда поезд находится на оснащенной станции. Сброс данных осуществляется с помощью Wi-Fi или передачи данных на некотором устройстве. Сброшенные данные передаются по Интернету через телефонную сеть, пересылкой запоминающего устройства по почте или иным способом связи в некоторое место для приема диагностической информации. В другом примере подвижной состав включает в себя спутниковый телефон или иное средство передачи данных во время движения. Данные периодически, по мере генерирования, непрерывно или при запуске передаются в некоторое место для приема диагностической информации.
Диагностическая информация представляет собой данные, соответствующие происшествиям, обнаруживаемым подвижным составом. Подвижной состав имеет одну или более подсистем, таких как подсистемы двигателя, регулирования скорости, определения местоположения, охлаждения, торможения, управления дверями, насоса, погрузки, парка оборудования или иные подсистемы для эксплуатации одного или более транспортных средств в подвижном составе. Каждая подсистема включает в себя датчики, такие как датчики напряжения, тока, температуры, давления, освещенности, звука или иные датчики. Датчики обнаруживают окружающие условия и/или действие для определенной подсистемы, множества подсистем, компонента, всего поезда или иной группы. В качестве альтернативы или дополнительно подсистема включает в себя процессор или схему для определения надлежащей обработки данных или функционирования компьютера. Подсистемы различаются по транспортным средствам, являются общими для всего поезда или имеют иное разделение, например, различные подсистемы торможения для определения эффективности торможения подвижным объектом или колесной тележкой.
Диагностическая информация для каждой подсистемы генерируется подсистемой. В соответствии с другим вариантом, информация от датчиков передается в процессор для генерирования сообщений или иной диагностической информации в тех случаях, когда процессор взаимодействует с различными подсистемами.
Диагностическая информация может включать в себя информацию от датчиков, такую как необработанные данные об окружающей среде. Информация от датчиков может либо не может обрабатываться. Например, информация от датчиков подвергается временной фильтрации таким образом, что определенные показания представляют собой среднее по некоторому интервалу времени. Информация от датчиков может быть лишь для моментов времени, связанных с проблемой, например, информация от датчиков или показания выше порога. В качестве альтернативы или дополнительно информация от датчиков является непрерывной или представляет собой измерения независимо от времени наступления события. Информация от датчиков может кодироваться для идентификации датчика, подсистемы, подвижного объекта, времени и/или состава.
Диагностическая информация может содержать сообщения. Сообщение является предупреждением, например, сообщение, генерируемое в случае, когда значение или значения датчика превышают параметры. В соответствии с другим вариантом, сообщение является периодическим или контрольным сообщением, связанным с нормальной работой или работой в пределах допустимых значений. В сообщении может указываться подсистема, информация от датчиков, время или иная информация. Например, сообщения содержат код серьезности ошибки, идентификацию подсистемы и время. Код серьезности ошибки является ранжированием того, насколько ошибочной (например, за пределами какого порога) и/или насколько важной (например, двигатель по сравнению с электроприводом двери) является подсистема или проблема, связанная с сообщением. Обозначение может включать в себя идентификатор подвижного состава, такой как номер состава или подвижного объекта.
В других вариантах осуществления диагностическая информация содержит как информацию от датчиков, так и сообщения. Данная комбинация может предусматриваться как часть сообщения (т.е. показания датчиков в сообщении) либо может обрабатываться отдельно. Возможна и иная диагностическая информация, такая как фильтрованная и необработанная информация от датчиков.
Принимаемая диагностическая информация может использоваться без последующей обработки. В соответствии с другим вариантом диагностическая информация фильтруется, например, показания датчиков подвергаются низкочастотной фильтрации. Некоторая часть диагностической информации может не использоваться для применения правил на шаге 24 или для обучения на шаге 28. Такая информация может отбрасываться или не накапливаться. Некоторая часть диагностической информации может объединяться или дополнительно обрабатываться для использования при применении правил на шаге 24 или для обучения на шаге 28, например, путем фильтрации по множеству датчиков для одной и той же подсистемы или различных подсистем для получения одного значения или совокупных значений.
Диагностическая информация принимается для формирования вектора признаков для машинного обучения на шаге 28. Вектор признаков является списком или группой переменных, используемых для вычисления статистики и/или обучения полученного путем машинного обучения классификатора. Диагностическая информация обеспечивает значения для вектора признаков. Любые отсутствующие значения могут быть заменены средним или предварительно заданным значением. От пользователя может потребоваться ввести отсутствующее значение или выбрать переменную из возможных значений. В соответствии с другим вариантом отсутствующие значения не заменяются в случае, если машинное обучение может работать с одним или более отсутствующих значений.
В качестве альтернативы или дополнительно диагностическая информация принимается для применения существующих правил на шаге 24. Например, существующие правила применяются к сообщениям и/или информации от датчиков. Путем применения существующих правил идентифицируется одно или более событий. Процессор применяет правила к диагностической информации.
Правила идентифицируют события. Любое событие может быть идентифицировано. Событием может быть отказ подсистемы, системы или компонента. Событием может быть прогнозированный отказ или возможный будущий отказ. Событие может относиться к окружающей среде, например, эксплуатация или даже нахождение во влажных, холодных, жарких или иных условиях, которые могут привести к необходимости проверки или замены компонентов. Событие может быть происшествием, таким как заклинивание двери в открытом или не полностью закрытом положении. Любой инцидент при обслуживании подвижного состава может быть событием и иметь соответствующее правило для обнаружения события по диагностической информации.
Каждое событие представляет собой набор данных. Сообщения и/или показания датчиков, относящиеся к конкретному типу инцидента, группируются. Событие может быть связано с одним сообщением и/или одним показанием датчика, но может вместо этого быть связано с множеством сообщений и/или показаний датчиков. Благодаря группированию диагностической информации, связанной с каждым событием, информация выдается диспетчеру более эффективным образом. Группирование или даже идентификация помогает сжать огромное количество сообщений и информации от датчиков и рассматривать лишь ограниченное число уведомлений (событий) в целях контроля парка. Правила используются для группирования диагностической информации.
Для идентификации события правила используют информацию сообщений, время или иные значения переменных, представленных в диагностической информации. Например, два или более принятых в один и тот же день сообщений о том, что дверь не закрылась, группируются для события обслуживания двери. Одно сообщение об отказе двери может быть вызвано нахождением в двери чемодана или коробки. Исходя из числа появлений сообщения или показания датчика и/или относящейся ко времени информации посредством применения правил, идентифицируется одно или более событий, либо информация игнорируется/отбрасывается.
Применяемые правила предусматриваются предшествующим генерированием адаптивных правил. В соответствии с другим вариантом применяемые правила являются вводимыми вручную или традиционно используемыми правилами. Например, начальный набор правил задается вручную. Пользователи (например, эксперты) задают бизнес-правила для группирования сообщений в события. Правила могут применяться к нескольким сообщениям (кодам сообщений) и могут учитывать число появлений сообщений, а также временные ограничения. Правило может быть применимым исключительно к сообщениям, исключительно к информации от датчиков или к совокупности сообщений и информации от датчиков. Как только создается начальный набор правил, система применяет правила.
Правила последовательно применяются к поступающему потоку информации сообщений и датчиков для создания событий. Для последовательности могут использоваться любые критерии, такие как степень значимости или серьезность соответствующего события. В одном варианте осуществления события идентифицируются для одного из правил перед другим из правил на основе, по меньшей мере, отчасти, относительного числа событий для одного и другого из правил. Правила, связанные с более частым генерированием событий, применяются в первую очередь. Поскольку оценка каждого правила может оказаться довольно дорогостоящей при объединении сложных ограничений по сообщениям и информации от датчиков с большими наборами данных, механизм формирования правил может отслеживать наиболее «популярные» правила и применять их в первую очередь. Может использоваться и иной порядок.
На шаге 26 принимается информация о распределении. Информация о распределении показывает распределение событий относительно соответствующих действующих правил. Диспетчер или иной пользователь рассматривает события. Если событие заслуживает внимания, такого как отправка механика или планирование деятельности, событие могло быть надлежащим образом идентифицировано или подтверждено. Если пользователь игнорирует, не учитывает или иным образом отклоняет событие, событие могло не быть надлежащим образом идентифицировано. Человек-оператор может оценивать сформированные события и исключать некоторые из них как несоответствующие. Например, пользователь рассматривает события и информацию от датчиков, связанные с идентифицирующим событие правилом, и определяет, что условия окружающей среды (например, высокая температура) привели, скорее, к сообщениям, чем к отказу оборудования. Событие отклоняется. В соответствии с другим вариантом пользователь может изменять событие, например, удалять одно или более сообщений как несоответствующие, несмотря на то, что они сгруппированы для события, или добавлять одно или более событий, ранее не входящих в группу. Сообщения и/или информация от датчиков могут удаляться оператором из события, если диагностическая информация считается не имеющей отношения к конкретной проблеме.
На шаге 26 фиксируются действия пользователя. Процессор записывает вызываемое пользователем действие, предпринимаемое в отношении каждого события, и сохраняет данное действие в реляционной базе данных или базе данных на базе файлов для последующего анализа. Действия могут ограничиваться бинарным набором (например, принять или отклонить), набором многомерных данных (например, принять, не уверен, отклонить) или непрерывным распределением (например, 0-1). Ограниченные действия могут отображаться в принятие или отклонение. В соответствии с другим вариантом, процессор записывает любое действие, предпринимаемое в отношении правила, обнаружившего событие. В ответ на события, запускаемые применением правил к данным, пользователь может выполнять одно или более действий с помощью компьютера. Эти действия могут фиксироваться.
В рамках контроля распределения событий статистика для различных правил вычисляется по действиям пользователя. Для каждого правила статистика вычисляется по распределению в отношении событий для соответствующего правила. Статистика вычисляется за любой требуемый период, например, статистика по распределениям за месяц. Система фиксирует действия человека и хранит статистику, связанную с каждым правилом. Примеры статистики включают в себя следующее: сколько раз правило запустило или создало событие, сколько раз события, созданные правилом, были отменены (исключены), сколько изменений было внесено в запущенные события и какие правила наиболее широко использовались для запуска событий. Кроме того, может использоваться другая статистика либо статистика в меньшем количестве.
На шаге 28 к диагностической информации применяется машинное обучение. Процессор принимает входной вектор признаков и информацию наземного контроля данных для изучения того, как различать реальные события и нежелательную информацию. Может использоваться любое машинное обучение, например, метод управляемого обучения, использующий статистическую модель (например, Байесову сеть). Машинное обучение определяет классификатор, различающий позитивные и негативные события. Полученный путем машинного обучения классификатор представляет собой любой один или более классификаторов. Может использоваться один класс бинарного классификатора, набор различных классификаторов, каскадные классификаторы, иерархический классификатор, классификатор нескольких классов, основанный на модели классификатор, основанный на машинном обучении классификатор или их совокупность. К классификаторам нескольких классов относятся CART, метод k-ближайших соседей, нейронная сеть (например, многоуровневый перцептрон), модель, учитывающая механизм выбывания, или другие. Может использоваться вероятностное дерево ускорения. Может использоваться выходной код с исправлением ошибок (ЕСОС). В одном варианте осуществления полученный путем машинного обучения классификатор является классификатором на основе вероятностного дерева ускорения. Вероятностное дерево ускорения (РВТ) объединяет классификацию, распознавание и кластеризацию в одну обработку. В соответствии с другим вариантом используются способы программного, основанного на знаниях поиска в пространстве признаков или оптимизации.
Для основанных на обучении методов классификатор обучается различению на основе признаков. Например, алгоритм вероятностной модели избирательно объединяет признаки в большую группу слабых алгоритмов обучения на основе значений имеющихся переменных. В рамках машинного обучения некоторые переменные выбираются, а другие не выбираются. Переменные с наибольшей или достаточной корреляцией или причинно-следственной связью с надлежащим обнаружением событий выбираются, а переменные с малой или отсутствующей корреляцией или причинно-следственной связью не выбираются. Признаки, относящиеся к идентификации событий, извлекаются и изучаются в машинном алгоритме на основе наземного контроля данных режима обучения, давая в результате вероятностную модель. Может извлекаться комплекс признаков любого размера, например, десятки, сотни или тысячи переменных. Комплекс включает в себя признаки, определяемые машиной во время процесса обучения, и может предварительно задаваться программистом. В качестве входного признака может использоваться вся диагностическая информация, некоторая диагностическая информация, только диагностическая информация, связанная с событиями, подчиняющимися действующим правилам, или иная группа диагностической информации за некоторый период времени. Обучение устанавливает наиболее определяющие признаки для заданной классификации и исключает меньшие или неопределяющие признаки. Статистика по зафиксированному принятию/отклонению каждого правила может использоваться в качестве входных признаков при обучении или просто для сравнения с целью определения относительной эффективности правил.
Классификатор обучается по набору данных режима обучения с помощью компьютера. Для подготовки набора обучающих выборок зафиксированное пользователем распределение для событий используется в качестве наземных контрольных данных. Для событий и/или диагностической информации принятие или отклонение события означает наземные контрольные данные. Например, принимается диагностическая информация, сгруппированная для события, которое принято. Для диагностической информации, добавленной к событию или удаленной из него, принятие (добавление информации) или отклонение (удаление информации) используется для обозначения наземных контрольных данных.
Используется любое число записей для предшествующей диагностической информации. Например, используются диагностическая информация, события и распределение за период в один месяц. Могут использоваться более длинные или более короткие периоды, например, за год с целью учета сезонных изменений. Путем использования примера или данных режима обучения для десятков, сотен или тысяч примеров с известным состоянием распределения процессор может определять взаимозависимости различных переменных и результата идентификации надлежащего события. Данные режима обучения собираются вручную, собираются автоматически по мере получения или извлекаются для определения значений переменных в данных режима обучения.
Некоторая диагностическая информация может не использоваться для обучения. Например, диагностическая информация, связанная с правилом, которое запустило лишь одно или иное ограниченное число событий за соответствующий период, может быть исключена. Поскольку размер выборки для правила слишком мал, событие и соответствующая диагностическая информация не используются для обучения.
Данные режима обучения предназначены для подвижного состава, для которого будут применяться правила. Путем использования данных для предшествующей диагностической информации и/или событий одного и того же подвижного состава определяются переменные или вектор признаков, имеющие наибольшее отношение к правилам для этого подвижного состава. Различные переменные могут использоваться полученным путем машинного обучения классификатором для одного парка и не использоваться для другого парка или другого комплектования подвижного состава. Некоторые из данных режима обучения могут быть получены по подвижному составу других организаций, например, путем использования половины или более примеров от других организаций с аналогичным подвижным составом. Данные режима обучения по конкретной организации (например, одной компании) могут отклоняться или все же давать в результате другой полученный путем машинного обучения классификатор вместо использования также данных от других организаций. Может потребоваться набор данных режима обучения большего размера. В альтернативных вариантах осуществления все данные режима обучения поступают от других компаний, например, правила обучения, продаваемые или используемые множеством различных компаний для различных парков. Обучение адаптивным правилам проводится совместно для множества различных организаций.
На этапе обучения процессор применяет управляемое или иное обучение к диагностической информации с использованием подтверждения события или исключения события в качестве информации наземного контроля данных. Процессор изучает дополнительное правило по фиксированию и диагностическим данным. Путем фиксирования действий пользователя в течение некоторого времени система предлагает правила для удаления из набора правил (например, события из правила часто исключаются) или предлагает изменения существующего правила в случае фиксирования неоднократных вмешательств оператора.
Обучение осуществляется однократно, периодически или в ответ на сигнал запуска. Например, компания, отвечающая за парк подвижного состава или владеющая им, может пожелать обеспечить проведение анализа своих правил для повышения эффективности. Эта компания или сторонний поставщик услуг выполняет машинное обучение для создания измененных правил, новых правил, правил замены или иных правил. В другом примере обучение является непрерывным, например, постоянным или выполняемым регулярно (например, при получении диагностических данных или каждый месяц). При добавлении, замене, изменении или старении нового оборудования, подсистем и/или подвижного состава действие одного или более правил может быть менее эффективным. Благодаря использованию непрерывного обучения различия в диагностической информации регулярно включаются в набор правил.
Модуль изучения правил использует исключенные события для повторной проверки существующих правил путем применения алгоритмов управляемого обучения, которые рассматривают подтвержденные события как позитивные случаи, а исключенные события - как негативные случаи. Генерированная, обучающая последовательность может также использоваться для изучения новых правил с новыми атрибутами и параметрами. Модуль изучения правил может тестировать новые правила каждый раз, когда обновляется обучающая последовательность, и предлагать пользователю новое правило, если точность превосходит или обобщает существующее правило.
На шаге 30 по результатам применения управляемого обучения выдается новое правило. Изученные правила представляют собой матрицу. Матрица обеспечивает веса для различных переменных векторов признаков. Значения для вектора признаков взвешиваются и объединяются на основе матрицы. Правила применяются путем ввода вектора признаков (диагностической информации) в матрицу. Помимо матрицы могут использоваться и другие представления. Например, машинное обучение может обеспечивать статистику, идентифицирующую наиболее соответствующую диагностическую информацию заданного типа события. При этом правило создается по статистической информации. Может использоваться определенное число сообщений и/или показаний датчиков, например, десять вводимых значений, наиболее характерных для заданного события. При этом правило формируется по выбранным переменным или диагностической информации со взвешиванием или без него на основе относительного вклада переменной в результат.
С целью применения прогностический параметр событий или полученное путем машинного обучения правило применяется к диагностической информации парка. Диагностическая информация вводится в матрицу или правила прогностического параметра. Матрица или правила выдают любые запускаемые события на основе изученной статистической комбинации. Диспетчер или иной пользователь может действовать в соответствии с событиями. Пользователь подтверждает одно или более событий, например, путем задания карты обслуживания или планирования работ по подвижному составу или подсистеме. Пользователь может исключать одно или более событий, считая событие неважным или неточным.
С любыми запускаемыми событиями может быть связана некоторая вероятность, показывающая вероятность того, что событие является реальным или корректным. Вероятностная информация может помогать пользователю удалять событие и/или использоваться в качестве приоритета события, рассматриваемого ниже.
Выходная информация поступает к диспетчеру, программисту или иному лицу. В соответствии с другим вариантом выходная информация поступает на компьютер или устройство хранения данных, например, сохраняется матрица или иная форма правил, изученных машиной.
Новое правило может выдаваться в случае, если точность превосходит или обобщает существующее правило. В соответствии с другим вариантом новое правило выдается для сравнения с существующими правилами.
Выдаваемые правила независимо от формы являются такими же, как и существующие правила, или отличными от них (например, правила, используемые для установления наземного контроля данных). Например, правила могут быть такими же в случаях, когда существующие правила оказались оптимальными. В другом примере предлагается совершенно новое правило. Новое правило отличается от любого из действующих правил, например, основывается на других сообщениях, информации от датчиков или сообщениях и информации от датчиков. Новое правило может отличаться использованием другого периода или комбинации периодов, например, два или более сообщений одного типа в первом периоде и одно или более сообщений другого типа во втором периоде с того же или иного момента запуска. Новое правило может включать в себя некоторые из тех же критериев.
Новое правило может заменять одно или более из действующих правил. Например, новое правило является обобщением двух или более действующих правил. Обобщение может быть менее точным, но более эффективным. Обобщение может быть более точным, но менее эффективным. Новое правило может быть более точным и более эффективным. Точность означает большее отношение правильно идентифицированных событий к неправильно идентифицированным событиям. Эффективность относится ко времени компьютерной обработки в отношении применения правила и/или времени на рассмотрение событий пользователем. Обобщение правила может привести к меньшему, более точному набору правил, который может быть применен быстрее, чем больший набор, состоящий из нескольких частично совпадающих правил.
В одном варианте осуществления, представленном шагом 32, эффективность нового правила сравнивается с эффективностью действующего или старого правила. Эффективность проверяется на основе распределения. Новое правило может заменять или изменять существующее правило в случае, если новое правило действует лучше, чем предыдущее, при условии соответствующей обратной связи с пользователем. Новое правило реализуется для проверки эффективности. Если коэффициент принятия событий, запускаемых новым правилом, выше (или коэффициент отклонения или изменения ниже), новое правило заменяет старое или действующее правило. В соответствии с другим вариантом, эффективность проверяется по числу сообщений, информации от датчиков или числу сообщений и информации от датчиков, входящих или нет в генерируемые события. Число генерируемых событий при условии одной и той же входной диагностической информации может означать эффективность. Благодаря включению большего числа сообщений и/или генерированию меньшего числа событий эффективность может считаться лучше. Эффективность может проверяться таким способом по ранее полученным данным и до применения в реальном времени или для реальных принимаемых сообщений. Может использоваться и иная проверка эффективности.
Если меньшее число событий должно исключаться, большее число сообщений включаться в события или меньшее число событий генерироваться с использованием нового правила, новое правило может заменять действующее правило. Эффективность изначально может оцениваться по тому, попало ли в группу событий больше сообщений. Это может указывать на то, что правило приведет к исключению меньшего числа событий. Могут использоваться и иные критерии замены одного или более действующих правил на новое правило, например, показатели эффективности.
Выдаваемые правила могут применяться к последовательно принимаемой диагностической информации от подвижного состава. События генерируются и диагностическая информация группируется по событиям для снижения расходов на идентификацию проблем с подвижным составом. Обслуживание по техническому состоянию может выполняться легче, эффективнее и/или точнее.
В тех случаях, когда различные правила или наборы правил изучаются для различных организаций, например, различных парков подвижного состава, в обучение могут включаться различные входные признаки (типы диагностической информации), различные ограничения на управляемое обучение или иные различия. Выходные правила характерны и/или могут быть выполнены для конкретного подвижного состава. В соответствии с другим вариантом правила изучаются для более общего применения.
За счет продолжения приема информации о распределении и диагностической информации набор правил вновь может быть адаптирован. Правила могут повторно изучаться, но могут быть более оптимизированными.
Фиг.2 представляет собой блок-схему примера вычислительной системы 100 обработки для реализации описанных здесь вариантов осуществления, например, адаптивного дистанционного обслуживания подвижного состава. Системы, способы и/или машиночитаемые носители могут быть реализованы в различных формах аппаратных средств, программных средств, микропрограммных средств, специализированных процессоров или их совокупности. Некоторые варианты осуществления реализуются в программных средствах в качестве программы, в значительной степени содержащейся на долговременном программном запоминающем устройстве. Благодаря реализации с использованием системы или программы обеспечивается полностью автоматизированное или полу-автоматизированное генерирование правил, адаптируемое к обратной связи с пользователем.
Система 100 предназначена для адаптивного дистанционного обслуживания подвижного состава. В качестве альтернативы или дополнительно система 100 предназначена для применения правил. Система 100 входит в состав системы для обслуживания или эксплуатации подвижного состава. В соответствии с другим вариантом система 100 предназначена для изучения правил, которые затем подаются в отдельную систему для применения.
Система 100 является компьютером, персональным компьютером, сервером, рабочей станцией, системой диспетчеризации, сетевым процессором или иной известной в настоящее время или разрабатываемой позже системой обработки. Система 100 содержит, по меньшей мере, один процессор (именуемый далее процессором) 102, функционально связанный с другими компонентами с помощью системной шины 104. Процессор 102 осуществляет операции в рамках системы 100 или множества систем. Постоянное запоминающее устройство (ПЗУ) 106, оперативное запоминающее устройство (ОЗУ) 108, интерфейс 110 ввода/вывода, сетевой интерфейс 112 и внешнее запоминающее устройство 114 функционально связаны с системной шиной 104 с помощью процессора 102. Различные периферийные устройства, такие как, например, устройство отображения, дисковое запоминающее устройство (например, запоминающее устройство на магнитном или оптическом диске), клавиатура, печатающее устройство и мышь, могут быть функционально связаны с системной шиной 104 с помощью интерфейса 110 ввода/вывода или сетевого интерфейса 112. Вместо системной шины 104 могут использоваться прямые соединения.
Программа может выгружаться в процессор 102, имеющий любую подходящую архитектуру, и исполняться им. Аналогичным образом, стратегии обработки могут включать в себя мультипроцессорную обработку, многозадачность, параллельную обработку и т.д. Процессор 102 реализуется на компьютерной платформе, имеющей аппаратные средства, например, один или более центральных процессоров (ЦП), оперативное запоминающее устройство (ОЗУ) и интерфейс(ы) ввода/вывода (I/O). Компьютерная платформа также содержит операционную систему и набор микрокоманд. Различные описанные здесь процессы и функции могут либо входить в состав набора микрокоманд, либо входить в состав программы (или их совокупности), которая исполняется с помощью операционной системы. В соответствии с другим вариантом процессор 102 представляет собой один или более процессоров в сети и/или системе диспетчеризации.
Вычислительная система 100 может являться автономной системой или быть связана с сетью с помощью сетевого интерфейса 112. Сетевой интерфейс 112 может являться встроенным интерфейсом. Однако в различных примерах осуществления сетевой интерфейс 112 может включать в себя любое устройство, предназначенное для передачи информации на другое устройство и от него, например, универсальный асинхронный приемопередатчик (UART), цифровой интерфейс параллельного действия, программный интерфейс или любая совокупность известных или разрабатываемых позже программных и аппаратных средств. Сетевой интерфейс может быть связан с различными типами сети, включая локальную сеть (LAN), глобальную сеть (WAN), виртуальную частную сеть (VPN) и Интернет.
Команды, обратная связь с пользователем (информация о распределении), правила и/или диагностическая информация хранятся на долговременном машиночитаемом запоминающем устройстве, таком как внешнее запоминающее устройство 114, ОЗУ 108, ПЗУ 106 и/или локальная память (например, твердотельный накопитель или накопитель на жестких дисках). Одни и те же или различные машиночитаемые носители могут использоваться для команд и прочих данных. Внешнее запоминающее устройство 114 может быть реализовано с помощью системы управления базой данных (СУБД), управляемой процессором 102 и находящейся на запоминающем устройстве, таком как накопитель на жестких дисках, ОЗУ или съемный носитель. В соответствии с другим вариантом запоминающее устройство 114 является внутренним по отношению к процессору 102 (например, кэш). Внешнее запоминающее устройство 114 может быть реализовано на одной или более дополнительных вычислительных систем. Внешнее запоминающее устройство 114, внутреннее запоминающее устройство, иные машиночитаемые носители или их совокупности хранят данные, по меньшей мере, для одного парка или комплекта подвижного состава. Данные могут быть распределены по множеству запоминающих устройств или находиться в одном месте.
Данные для обучения классификатора или правил машинного обучения сохраняются. Сообщения, информация от датчиков или сообщения и информация от датчиков с подсистем парка поездов сохраняются. Данные режима обучения также содержат информацию о событиях, включая распределение запускаемых событий. В качестве альтернативы или дополнительно данные для применения полученного путем машинного обучения классификатора сохраняются. Данные содержат правила для составления диагностической информации в события.
Команды для реализации описываемых в данном документе процессов, способов и/или методов предусматриваются на машиночитаемом носителе информации или запоминающих устройствах, таких как кэш, буфер, ОЗУ, съемный носитель, накопитель на жестких дисках или иные машиночитаемые носители информации. К машиночитаемым носителям информации относятся различные типы энергозависимых и энергонезависимых носителей информации. Функции, действия или задачи, показанные на чертежах или описанные в данном документе, выполняются в ответ на один или более наборов команд, хранящихся в машиночитаемых носителях информации или на них. Функции, действия или задачи являются независимыми от конкретного типа набора команд, носителя информации, процессора или стратегии обработки и могут выполняться с помощью программных средств, аппаратных средств, интегральных схем, микропрограммных средств, набора микрокоманд и т.п., которые действуют сами по себе или в совокупности.
В одном варианте осуществления команды хранятся на устройстве со сменным носителем для считывания локальными или удаленными системами. В других вариантах осуществления команды хранятся в удаленном местоположении для передачи по компьютерной сети или по телефонным линиям. В других вариантах осуществления команды хранятся в определенном компьютере, ЦП, графическом процессоре (GPU) или системе. Поскольку некоторые из составляющих элементов системы и этапов способа, изображенных на прилагаемых чертежах, предпочтительно реализуются в программных средствах, реальные связи между элементами системы (или этапами процесса) могут отличаться в зависимости от того способа, которым программируются настоящие варианты осуществления.
Процессор 102 с помощью команд выполнен с возможностью приема информации о выполнении, диагностической информации и/или правил. Прием осуществляется посредством выгрузки из памяти или путем передачи. Принимаются данные, характерные либо обобщенные для парка поездов или иного подвижного состава.
Информация о выполнении предназначена для применения существующего правила. При применении правила генерируются события. Принятие, исключение или изменение события означают выполнение. Информация о выполнении используется в качестве обратной связи.
Каждое правило характерно для некоторого типа события. Например, одно правило идентифицирует проблемы, связанные с определенной подсистемой или даже определенным компонентом определенной подсистемы. Одно или более правил могут быть более общими, например, идентификация класса событий, связанных с одним или более компонентов. Одно или более правил могут генерировать различные типы событий, например, идентификация различных проблем для одной и той же подсистемы.
Процессор 102 принимает диагностическую информацию. Принимаются сообщения, информация от датчиков, одновременно сообщения и информация от датчиков или иная информация, означающая действие подвижного состава.
Процессор 102 выполнен с возможностью изучения одного или более правил, например, изучение классификатора, включающего в себя одно или более правил. Может использоваться любой процесс или программа машинного обучения, например, статистическая модель (например, Байесова сеть).
Для обучения процессор 102 определяет относительный или статистический вклад различных переменных в исход - принятое событие. Программист может выбирать учитываемые переменные. Программист может влиять на обучение, например, задавая ограничения на число переменных и/или требуя введения одной или более переменных, используемых в качестве входного вектора признаков конечного классификатора. Путем обучения классификатор идентифицирует переменные, вносящие вклад в приемлемые события.
При машинном обучении изучается новое правило. Новое правило предназначено для идентификации событий одного или более типов для парка поездов. Сообщения, информация от датчиков, одновременно сообщения и информация от датчиков или иная информация используются для изучения статистического соотношения данных и исхода. Информация о выполнении означает исход, поэтому новое правило изучается на основе информации о выполнении. Принятие и отклонение событий одного или более типов на основе существующего правила используется для создания нового правила. Новые правила могут изучаться на основе создания пользователем информации о выполнении при контроле в парке поездов проблем с обслуживанием. Сбор наземных контрольных данных при этом упрощается, предотвращая необходимость анализа экспертом данных режима обучения.
Новые правила имеют ограничение по времени, ограничение по периодичности или иные ограничения. Ограничения по времени могут означать приемлемые периоды между показаниями датчиков определенного уровня или между сообщениями одного и того же или различного типа. Ограничения по периодичности могут означать число появлений областей датчика определенного уровня или сообщений одного или более типов. Ограничения определяют правило или критерии, используемые для идентификации события.
Для нового правила могут использоваться различные ограничения. Новое правило может дополнительно или в качестве альтернативы включать в себя различные сообщения, информацию от датчиков либо одновременно сообщения и информацию от датчиков для запуска события. Новое правило отличается от существующего правила. Новое правило может являться модификацией существующего правила и/или обобщением данного существующего правила и другого существующего правила.
С целью применения процессор 102 применяет результирующую (полученную путем машинного обучения) статистическую модель или правила к принимаемым данным (например, сообщениям, информации от датчиков или иной диагностической информации). Правила может применять другой процессор. Правила могут применяться для тестирования, например, для измерения различий в выполнении. В соответствии с другим вариантом правила применяются для использования диспетчерами или с подвижным составом. Принимаемые данные применяются к правилам в качестве входных для полученной путем машинного обучения матрицы. На выходе матрицы указывается, является ли событие подходящим на основе входных данных. Поскольку правила создаются, используется процесс машинного обучения, действующий или применимый с отсутствующей информацией.
В другом варианте осуществления процессор 102 выполнен с возможностью назначения приоритетов применения правил. Статистика событий и соответствующие правила используются для управления тем, какие правила применяются к данным в первую очередь. Например, для каждого типа события предусматривается другой классификатор или правило. Правила, связанные с чаще запускаемыми событиями, применяются в первую очередь. Как только принимаемая диагностическая информация анализируется для определенного правила и не запускает событие, применяется следующее правило из списка приоритетов. Как только диагностическая информация запускает событие, другие правила могут не применяться, экономя время обработки.
Для назначения приоритетов правил могут использоваться критерии, отличные от относительной периодичности генерирования событий. Например, приоритет назначается по типу событий, при этом правила для более важных событий (например, сломанный двигатель или охлаждение) применяются перед правилами для менее важных событий (например, отказ двери).
Различные усовершенствования, описанные в данном документе, могут использоваться совместно или по отдельности. Хотя в данном документе со ссылками на прилагаемые чертежи были описаны характерные варианты осуществления настоящего изобретения, следует понимать, что изобретение не ограничивается данными конкретными вариантами осуществления и что специалисты могут вносить в него различные изменения в пределах объема и сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Компьютерно-реализуемый способ мониторинга и обработки данных для распознавания и классификации аномалий в работе установок и оптимизации их технического обслуживания и система для выполнения данного способа | 2021 |
|
RU2829543C1 |
| Способ, комплекс обработки информации об отказах устройств беспроводных сенсорных сетей передачи данных и связанных сетей | 2021 |
|
RU2801825C2 |
| Способ определения аномалии в киберфизической системе | 2022 |
|
RU2790331C1 |
| Система предотвращения утечки информации и способ предотвращения утечки информации | 2024 |
|
RU2830388C1 |
| Система и способ для выявления структуры паттернов и аномалий в потоке событий, поступающих от киберфизической системы или информационной системы | 2022 |
|
RU2793549C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДИАГНОСТИРОВАНИЯ ПРОМЫШЛЕННОГО ОБЪЕКТА | 2018 |
|
RU2707423C2 |
| СПОСОБ, ИСПОЛЬЗУЮЩИЙ ОПОЗНАВАНИЕ ВОЗДЕЙСТВИЯ ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ПАРКАМИ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2561482C2 |
| СПОСОБ ПЛАНИРОВАНИЯ ПЕРЕДВИЖЕНИЯ МНОЖЕСТВА ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ ЧЕРЕЗ ЖЕЛЕЗНОДОРОЖНЫЙ СТАНЦИОННЫЙ ПАРК (ВАРИАНТЫ) | 2006 |
|
RU2430845C2 |
| УСТРОЙСТВА, СИСТЕМЫ И СПОСОБЫ, КАСАЮЩИЕСЯ СБОЯ PLC-СИСТЕМЫ | 2007 |
|
RU2419827C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ПАССИВНЫХ ПЛАТЕЖЕЙ НА ОСНОВЕ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 2016 |
|
RU2718974C2 |
Изобретение относится к области адаптивного дистанционного обслуживания подвижных составов с помощью машинного обучения правилам. Техническим результатом является обеспечение автоматического обновления правил, применяемых для группировки диагностической информации, для более точной группировки диагностической информации. Правила могут заменяться, обобщаться или иным образом адаптироваться на основе взаимодействия диспетчеров с результатами действующих правил. Принятие или исключение события диспетчером используются в качестве наземного контроля данных для управляемого машинного обучения новому правилу. При машинном обучении используется обратная связь с пользователем для обновления набора правил. 3 н. и 17 з.п. ф-лы, 2 ил.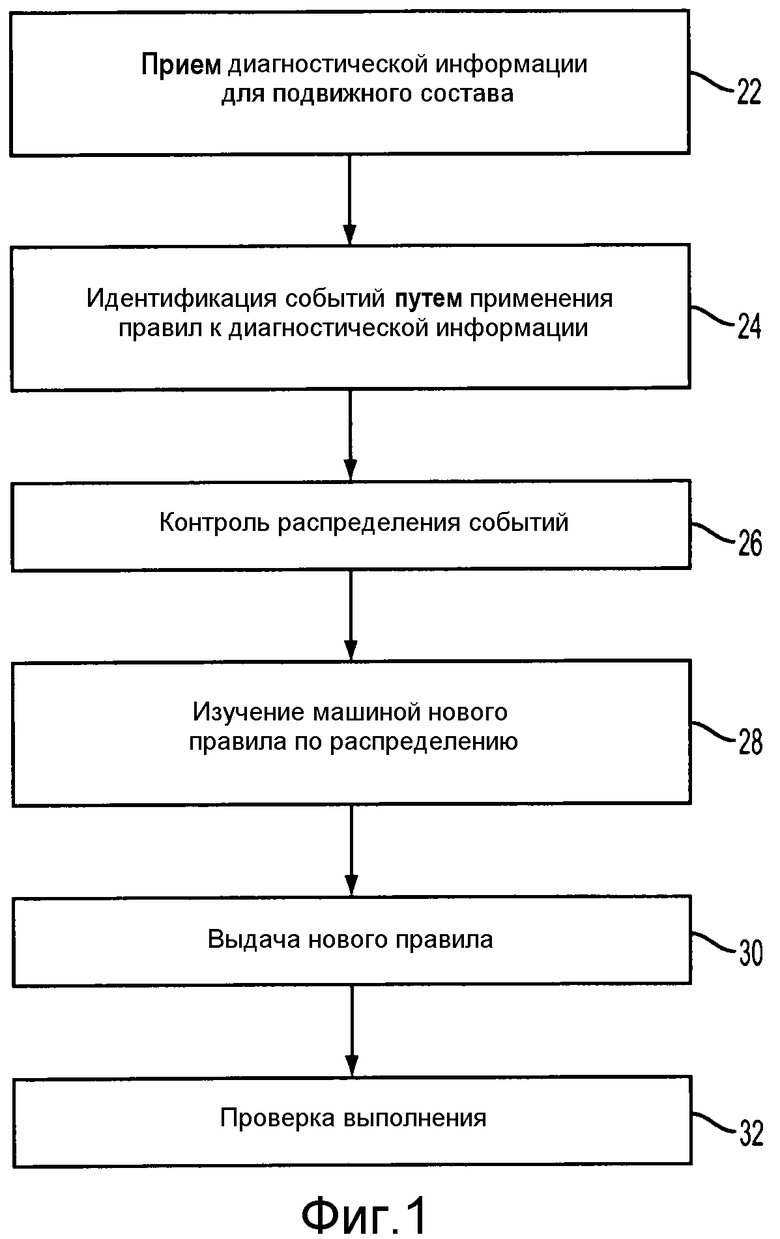
1. Способ адаптивного дистанционного обслуживания подвижных составов, причем данный способ включает в себя:
прием (22) диагностической информации по функционированию подвижного состава;
идентификацию (24) процессором (102) множества событий на основе множества действующих правил, применяемых к диагностической информации, причем действующие правила и соответствующие события относятся к инцидентам при обслуживании подвижного состава;
прием (26) информации о распределении, показывающей распределение событий по отношению к соответствующим действующим правилам, причем распределение соответствует подтверждению события и исключению события;
применение (28) процессором (102) управляемого машинного обучения к диагностической информации с использованием подтверждения события и исключения события в качестве информации наземного контроля данных; и
выдачу (30) нового правила в результате применения (28) управляемого обучения, причем новое правило отличается от любого из действующих правил.
2. Способ по п.1, отличающийся тем, что выдача (30) нового правила включает в себя замену множества действующих правил новым правилом.
3. Способ по п.1, отличающийся тем, что выдача (30) нового правила включает в себя замену одного из действующих правил.
4. Способ по п.3, дополнительно включающий в себя:
проверку (32) выполнения одного из действующих правил; и
проверку (32) выполнения нового правила;
отличающийся тем, что замена выполняется в случае, если выполнение нового правила приводит к меньшему числу исключений события, чем выполнение одного из действующих правил.
5. Способ по п.1, отличающийся тем, что прием (22) диагностической информации включает в себя прием сообщений, содержащих код серьезности ошибки, обозначение подсистемы и время.
6. Способ по п.1, отличающийся тем, что прием (22) диагностической информации включает в себя прием показаний датчиков.
7. Способ по п.1, отличающийся тем, что идентификация (24) событий включает в себя группирование диагностической информации, связанной с каждым событием.
8. Способ по п.1, отличающийся тем, что идентификация (24) событий включает в себя применение (28) действующих правил на основе числа появлений диагностической информации и временных ограничений.
9. Способ по п.1, отличающийся тем, что применение (28) управляемого обучения включает в себя вычисление статистики для каждого из правил, причем статистика вычисляется по распределению в отношении событий для соответствующего правила.
10. Способ по п.1, дополнительно включающий в себя:
осуществление идентификации одного из правил перед другим из правил на основе, по меньшей мере, частично относительного числа событий для одного и другого из правил.
11. Система для адаптивного дистанционного обслуживания подвижного состава, причем система включает в себя:
по меньшей мере, одно запоминающее устройство (114), выполненное с возможностью хранения сообщений и информации от датчиков подсистем парка поездов; и
процессор (102), выполненный с возможностью:
приема информации о выполнении для применения существующего правила для идентификации (24) первого типа события для парка поездов по сообщениям, информации от датчиков либо по сообщениям и информации от датчиков; и обучение новому правилу, идентифицирующему первый тип события для парка поездов по сообщениям, информации от датчиков либо по сообщениям и информации от датчиков, причем новое правило имеет ограничение по времени, ограничение по периодичности либо ограничения по времени и периодичности для сообщений, информации от датчиков либо сообщений и информации от датчиков, отличных от существующего правила, причем обучение новому правилу осуществляется на основе информации о выполнении.
12. Система по п.11, отличающаяся тем, что новое правило является модификацией существующего правила.
13. Система по п.11, отличающаяся тем, что новое правило является обобщением данного существующего правила и другого существующего правила.
14. Система по п.11, отличающаяся тем, что процессор (102) выполнен с возможностью назначения приоритета новому правилу относительно других правил таким образом, что правила, связанные с чаще возникающими типами событий, включающими в себя первый тип, применяются перед другими из правил.
15. Система по п.11, отличающаяся тем, что информация о выполнении включает в себя принятие и отклонение событий первого типа на основе существующего правила.
16. Система по п.15, отличающаяся тем, что процессор (102) выполнен с возможностью обучения на основе создания пользователем информации о выполнении при контроле в парке поездов проблем с обслуживанием.
17. Долговременный машиночитаемый носитель информации (114, 106, 108), сохраняющий в себе данные, представляющие собой команды, исполняемые программируемым процессором (102) для адаптивного дистанционного обслуживания подвижного состава, причем носитель информации содержит команды для:
приема (22) данных, представляющих собой происшествия, обнаруживаемые подвижным составом;
фиксирования (26) действий пользователя в отношении событий, запускаемых применением к данным существующих правил; и
обучения (28) процессором (22) последующему правилу по результатам фиксирования и по данным.
18. Долговременный машиночитаемый носитель информации по п.17, отличающийся тем, что обучение (28) включает в себя управляемое обучение, при котором действия пользователя по принятию и исключению событий являются наземным контролем данных, а данные являются входными признаками.
19. Долговременный машиночитаемый носитель информации по п.17, отличающийся тем, что фиксирование (26) включает в себя вычисление статистики по действиям пользователя в отношении правил.
20. Долговременный машиночитаемый носитель информации по п.17, отличающийся тем, что прием (22) включает в себя прием сообщений и информации от датчиков;
дополнительно включает в себя применение (24) действующих правил к сообщениям и информации от датчиков;
отличающийся тем, что фиксирование (26) включает в себя прием указания пользователя о принятии или исключении событий; и
отличающийся тем, что обучение (28) включает в себя машинное обучение, при котором принятие и исключение событий включает в себя наземные контрольные данные и сообщения и информацию от датчиков, содержащие входные признаки.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| АДАПТИВНАЯ СИСТЕМА ФИЛЬТРАЦИИ НЕНУЖНЫХ СООБЩЕНИЙ | 2003 |
|
RU2327205C2 |

