Область техники, к которой относится изобретение
Настоящее изобретение относится к системе управления транспортным средством, в частности к педали.
Уровень техники
Педали для транспортных средств с механической трансмиссией включают педали акселератора, тормоза и сцепления, при этом транспортные средства с автоматической трансмиссией не требуют педали сцепления. Педаль акселератора, известная так же, как педаль газа или педаль управления дроссельной заслонкой, управляет подачей топлива и/или воздуха в двигатель транспортного средства, которое может представлять собой автомобиль.
В некоторых автомобилях предусмотрена дополнительная педаль стояночного тормоза. Эта педаль стояночного тормоза заменяет ручной тормоз.
Педали обычно устанавливают в напольном или подвесном варианте исполнения. Напольные педали выступают из пола транспортного средства, в то время как подвесные педали углублены в выемке для ног транспортного средства.
Позади каждой педали должно быть предусмотрено свободное пространство для того, чтобы водитель транспортного средства мог нажимать на педаль. Водитель транспортного средства активирует педаль, нажимая на нее ногой, и перемещает ее в направлении передней части транспортного средства.
Таким образом, в известных транспортных средствах обеспечивается пространство вокруг, выше и/или ниже педалей. Это пространство может представлять собой источник опасности при эксплуатации транспортного средства. Так, например, различные предметы могут заклинивать педали или наматываться вокруг них, или детали интерьера могут мешать правильному и безопасному функционированию педалей. Такие предметы включают напольные покрытия и коврики, которые расположены в углублении для ног транспортного средства и опутывают педали. При этом напольное покрытие (или другой предмет) может мешать правильному управлению водителем транспортного средства одной или несколькими педалями, блокируя доступ к педали, вызывая заедание механизма педали, ограничивая диапазон перемещения педали или затрудняя реакцию водителя. Это, в свою очередь, может приводить к тому, что водитель потеряет управление или не будет полностью контролировать движение транспортного средства.
Раскрытие изобретения
Задача изобретения заключается в том, чтобы уменьшить опасность, которую педали создают в транспортном средстве и вокруг него.
Согласно первому аспекту изобретение обеспечивает педаль для транспортного средства, содержащую поверхность управления и ось поворота, при этом поверхность управления поворачивается вокруг оси поворота, и поворот указанной поверхности управления в первом направлении связан с тормозной системой указанного транспортного средства, а поворот указанной поверхности управления во втором направлении связан с системой набора скорости указанного транспортного средства, таким образом, поворот указанной поверхности управления вокруг указанной оси поворота вызывает торможение или ускорение указанного транспортного средства, и при этом педаль выполнена с возможностью управления двумя ногами пользователя, т.е. первая нога используется для поворота педали в первом направлении, а вторая нога - для поворота педали во втором направлении.
Указанная педаль может также содержать педаль сцепления, при этом педаль сцепления расположена между первой поверхностью управления и водителем транспортного средства.
Педаль сцепления может быть расположена между осью поворота и местоположением пользователя.
Поверхность управления может быть вогнутой по отношению к пользователю.
Поверхность управления может быть ориентирована, по существу, вертикально по отношению к ориентации пользователя.
Согласно другому аспекту изобретение обеспечивает устройство управления транспортным средством, выполненное с возможностью управления двумя ногами водителя транспортного средства, при этом указанное устройство управления устанавливается в указанном транспортном средстве таким образом, чтобы давление на первую сторону первой поверхности управления первой ногой водителя подавало транспортному средству команду ускорения, в то время как давление на вторую сторону первой поверхности управления второй ногой водителя подавало транспортному средству команду торможения, и при этом указанное устройство управления выполнено таким образом, что оно не может одновременно подавать команды ускорения и торможения.
Согласно еще одному аспекту изобретение обеспечивает педаль для транспортного средства, содержащую поверхность управления и ось поворота, при этом поверхность управления поворачивается вокруг оси поворота, и поворот указанной поверхности управления в первом направлении связан с тормозной системой указанного транспортного средства, а поворот указанной поверхности управления во втором направлении связан с системой набора скорости указанного транспортного средства, таким образом, поворот указанной поверхности управления вокруг указанной оси поворота вызывает торможение или ускорение указанного транспортного средства, и при этом ось поворота ориентирована, по существу, параллельно средней линии, пользователя педали, расположенного, по существу, перпендикулярно поверхности пола транспортного средства.
Согласно следующему аспекту изобретение обеспечивает систему управления транспортным средством, содержащим систему набора скорости и тормозную систему, при этом система управления содержит поверхность управления, которая установлена с возможностью поворота вокруг оси поворота и которая соединена с указанной системой набора скорости и указанной тормозной системой, таким образом, поворот указанной поверхности управления в первом направлении вызывает ускорение указанного транспортного средства, а поворот во втором направлении вызывает торможение, и при этом указанная система управления содержит также средство для определения изменения направления поворота указанной системы управления, которая выполнена с возможностью переключения между торможением и ускорением или наоборот или определения указанного изменения направления поворота указанной поверхности управления.
Средство для определения изменения направления поворота указанной поверхности управления может содержать средство для определения расстояния между указанной поверхностью управления и углублением для ног в указанном транспортном средстве.
Средство для определения изменения направления поворота указанной поверхности управления может содержать линейный датчик положения.
Средство для определения изменения направления поворота указанной поверхности управления может содержать датчик углового положения.
Транспортное средство может представлять собой автомобиль.
Поверхность управления педали может быть установлена при помощи подвесного или напольного соединения. Поверхность управления может быть неподвижно закреплена в углублении для ног, или ее позицию в углублении для ног можно регулировать при помощи электронных или механических устройств.
Изобретение обеспечивает педаль, которая с меньшей степенью вероятности будет защемляться или опутываться в углублении для ног транспортного средства такими предметами, как коврики. Кроме того, если, например, напольное покрытие по меньшей мере частично закрывает педаль согласно изобретению, педаль сохраняет управляемость.
Поворот педали вокруг оси поворота обеспечивается определенным механизмом, при этом можно нажимать на первую или вторую сторону или на конец поверхности управления, чтобы генерировать управляющий сигнал. Однако невозможно одновременно нажимать на обе стороны или оба конца поверхности управления, чтобы генерировать несколько управляющих сигналов, соответствующих обеим сторонам или обоим концам поверхности управления.
Педаль согласно изобретению обеспечивает управление транспортным средством, при этом невозможно пытаться одновременно создать ускорение и торможение. Таким образом, обеспечивается более безопасное и надежное управление транспортным средством и исключается излишний износ тормозных колодок и тормозных дисков.
Обеспечивая площадь педали изобретения, сравнимую с размером углубления для ног, варианты осуществления изобретения уменьшают шансы того, что водитель в экстренной ситуации упустит требуемый конец или сторону педали.
Кроме повышения безопасности при эксплуатации транспортного средства достоинства изобретения включают более эффективное использование пространства, расположенного за педалями. Поскольку размеры полости за педалями в углублении для ног транспортного средства уменьшаются, это пространство можно использовать либо для уменьшения длины транспортного средства, либо для увеличения емкости этой или другой части транспортного средства.
Один или более датчиков могут быть использованы для определения силы, которую прикладывает водитель для поворота поверхности управления вокруг оси поворота. Силу кручения, действующую вокруг оси поворота, или величину поворота вокруг оси поворота также можно измерить для того, чтобы преобразовать действия водителя в управление транспортным средством.
Кроме того, гидравлическую, пневматическую, электрическую или электронную систему можно разместить позади по меньшей мере одной стороны поверхности управления для передачи силы, приложенной водителем к какой-либо стороне поверхности управления, к системе торможения или к системе набора скорости транспортного средства.
Краткое описание чертежей
Ниже приведено описание изобретения со ссылками на прилагаемые чертежи, на которых показаны:
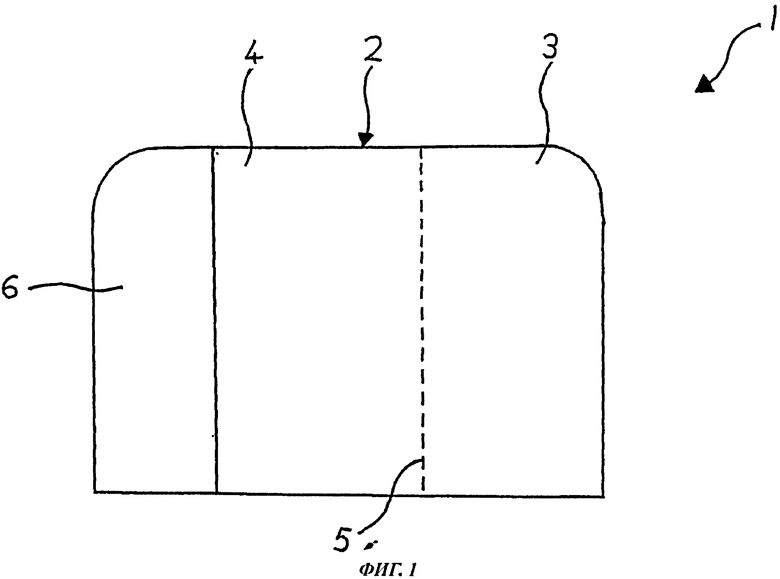
фигура 1 - схематический вид спереди педали согласно первому варианту осуществления изобретения;
фигура 2 - схематический вид сверху педали с фигуры 1;
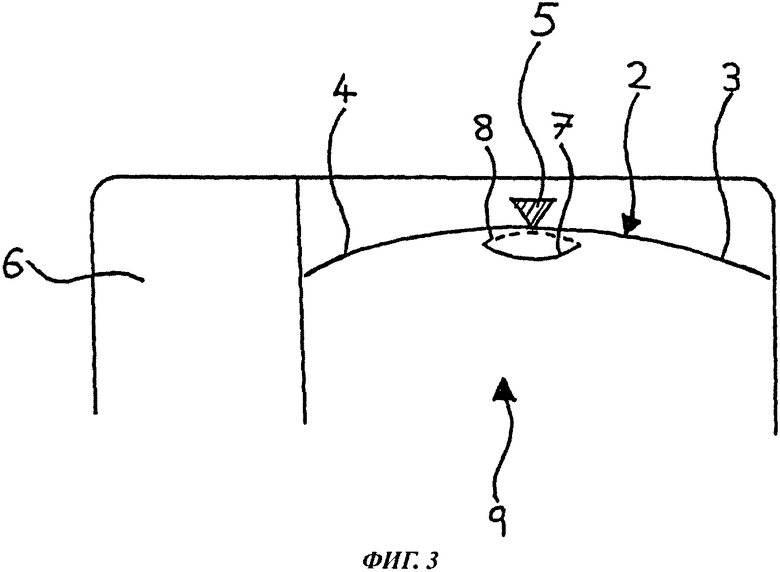
фигура 3 - схематический вид сверху педали согласно второму варианту осуществления изобретения;
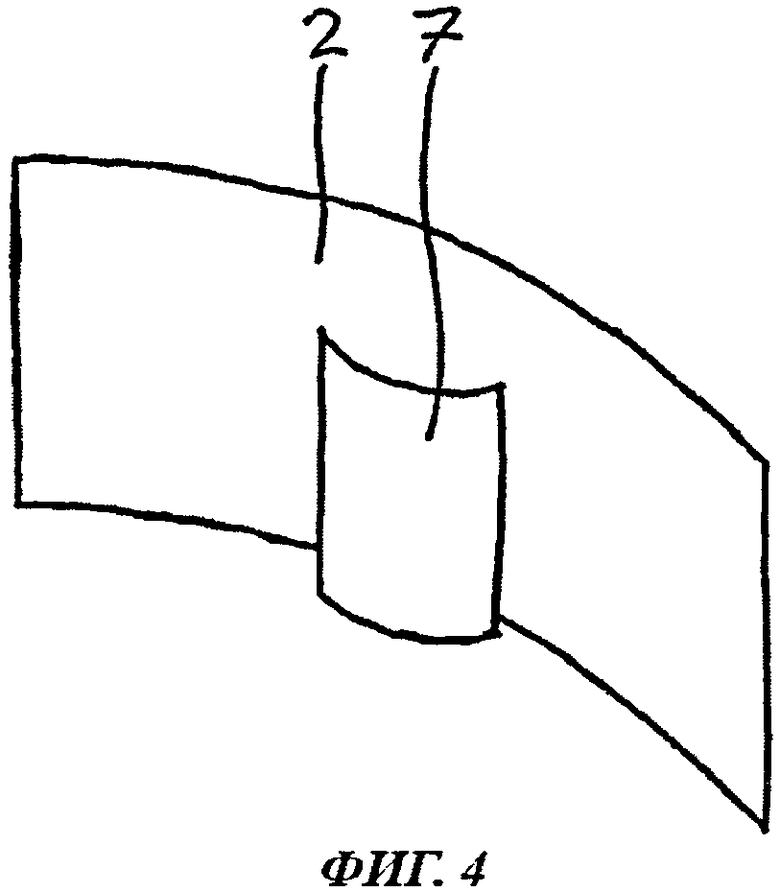
фигура 4 - вид в изометрии педали согласно второму варианту осуществления изобретения;
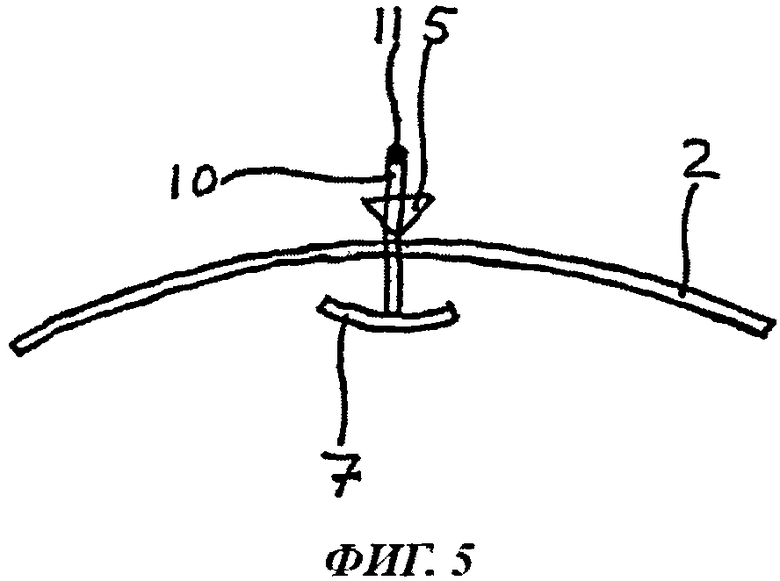
фигура 5 - схематический вид сверху педали согласно второму варианту осуществления изобретения;
фигура 6 - схематический вид сверху части педали согласно третьему варианту осуществления изобретения;
фигура 7 - схематический вид сверху педали согласно четвертому варианту осуществления изобретения;
фигура 8 - вид в изометрии педали и подножки в углублении для ног согласно второму варианту осуществления изобретения;
фигура 9 - схематический вид сверху педали и пневматические соединения согласно пятому варианту осуществления изобретения;
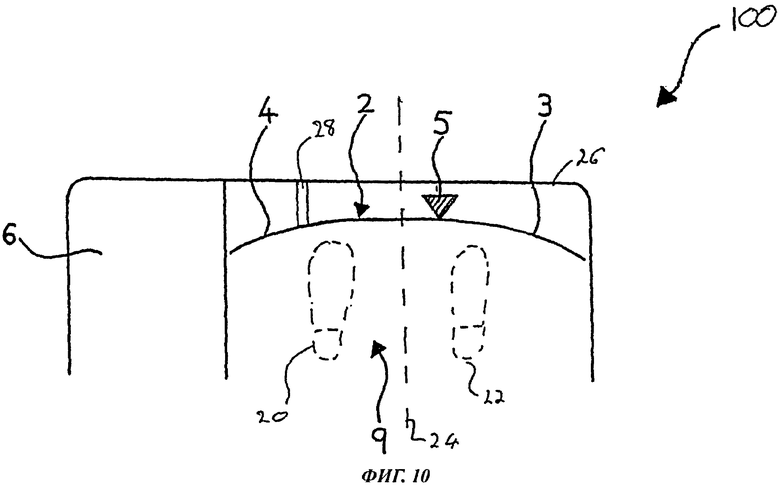
фигура 10 - схематический вид сверху педали согласно шестому варианту осуществления изобретения;
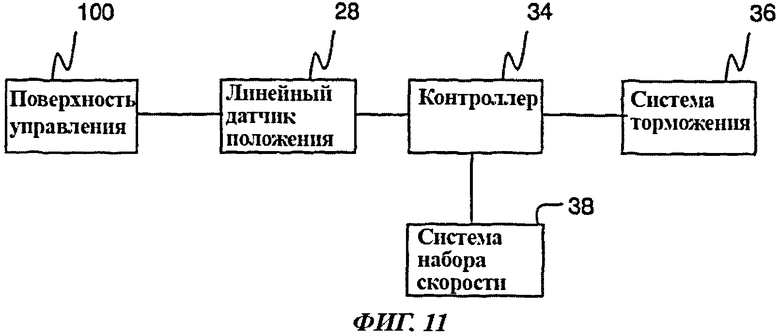
фигура 11 - схематическое изображение поверхности управления, установленной в транспортном средстве, согласно варианту осуществления с фигуры 10; и
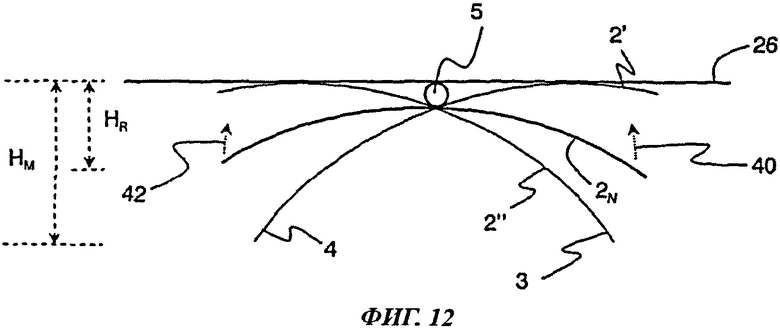
фигура 12 - схематическое изображение вида сверху поверхности управления согласно варианту осуществления изобретения, иллюстрирующее функционирование поверхности управления.
Осуществление изобретения
Как показано на фигуре 1, педаль 1 содержит поверхность 2 управления, имеющую первую сторону 3 и вторую сторону 4. Рядом с первой поверхностью 2 управления расположена подножка 6. Первая поверхность 2 управления может перемещаться независимо от подножки 6. Ось 5 поворота присоединена к поверхности 2 управления и разделяет поверхность управления, которая содержит, таким образом, первую сторону 3 и вторую сторону 4.
Поверхность 2 управления поворачивается вокруг оси 5 поворота при приложении силы к первой стороне 3 первой поверхности 2 управления или ко второй стороне 4 первой поверхности 2 управления.
Как показано на фигуре 2, педаль 1 расположена в углублении 9 для ног автомобиля. Ось 5 поворота расположена позади поверхности 2 управления. Расположение оси поворота в показанном варианте осуществления обеспечивает большую площадь второй стороны 4, чем площадь первой стороны 3. Как показано на фигуре 2, левая нога 20 и правая нога 22 (обе ноги показаны штриховым контуром) пользователя расположены в углублении 9 для ног. Штриховая линия 24 представляет собой среднюю линию пользователя, при этом левая нога 20 и правая нога 22 расположены с обеих сторон от средней линии 24. Поверхность управления 3 ориентирована таким образом, что левая нога 20 управляет второй стороной 4, а правая нога 22 - первой стороной 3. Поскольку поверхность 2 управления поворачивается вокруг оси 5 поворота, очевидно, что пользователь не может одновременно нажимать на первую сторону 3 и вторую сторону 4.
Сила, приложенная к первой стороне 3 или второй стороне 4 первой поверхности 2 управления, заставляет первую поверхность 2 управления поворачиваться вокруг оси 5 поворота.
Поворот первой поверхности 2 управления вокруг оси 5 поворота обеспечивает входной сигнал для системы набора скорости и системы торможения транспортного средства. В показанном варианте осуществления входной сигнал подается в системы набора скорости и торможения при помощи механической связи. В других вариантах осуществления может быть предусмотрена гидравлическая, пневматическая или электронная связь. Механическая связь функционирует аналогично напольной или подвесной педали в известной конструкции автомобиля, при этом механическая связь соединяет первую поверхность 2 управления с системой набора скорости и тормозной системой автомобиля.
В случае использования электронной системы датчик определяет позицию или перемещение первой поверхности 2 управления. Затем эта информация передается на исполнительный механизм, который управляет системой набора скорости и тормозной системой.
В других вариантах осуществления может быть использована комбинация вышеуказанных типов систем управления. Для повышения надежности системы набора скорости и тормозной системы можно использовать множество систем управления.
На фигуре 3 показан вид сверху второго варианта осуществления педали 1, содержащей поверхность 2 управления и педаль 7 сцепления. Поверхность 2 управления содержит первую сторону 3 и вторую сторону 4.
Педаль 7 сцепления расположена перед поверхностью 2 управления и осью 5 поворота. Педаль 7 сцепления соединяется со сцеплением, которое функционирует, когда педаль 7 сцепления нажата.
На фигуре 3 управление педалью 7 сцепления осуществляется под действием силы, прилагаемой водителем. Нажатое состояние 8 педали 7 сцепления показано штриховой линией.
На фигуре 4 показана поверхность 2 управления и педаль 7 сцепления. В этом варианте осуществления педаль 7 сцепления не выступает на всю высоту первой поверхности 2 управления. Однако в другом варианте осуществления педаль 7 сцепления выступает на всю высоту первой поверхности 2 управления.
На фигуре 5 показана поверхность 2 управления и связанная с ней ось 5 поворота. Кроме того, показаны педаль 7 сцепления, точка 11 поворота и тяга 10, соединяющая точку 11 поворота с педалью 7 сцепления.
В этом варианте осуществления педаль 7 сцепления соединяется с датчиком давления (не показан). Датчик давления предназначен для определения нажатия водителем транспортного средства педали 7 сцепления. Сигнал от датчика давления передается в исполнительный механизм, который управляет сцеплением транспортного средства.
Датчик давления расположен между педалью 7 сцепления и первой поверхностью 2 управления. Для того чтобы сила, прилагаемая к педали 7 сцепления, не вызывала поворота поверхности 2 управления, педаль сцепления установлена перед осью 5 поворота. В другом варианте осуществления поверхность 2 управления включает датчик давления, соединенный с исполнительным механизмом сцепления вместо педали сцепления.
Точка 11 поворота соединяется с педалью 7 сцепления таким образом, что любое перемещение педали 7 сцепления создает силу, которая вызывает перемещение точки 11 поворота. Точка 11 поворота соединяется со сцеплением автомобиля. В этом варианте осуществления точка 11 поворота соединяется с педалью 7 сцепления при помощи механической связи. В других вариантах осуществления это соединение может быть гидравлическим, пневматическим или электронным.
В варианте осуществления, показанном на фигуре 5, тяга 10 проходит через первую поверхность 2 управления над осью 5 поворота. Тяга 10 контактирует с задней частью первой поверхности 2 управления. В некоторых вариантах осуществления ось 5 поворота не проходит по всей вертикальной длине первой поверхности 2 управления.
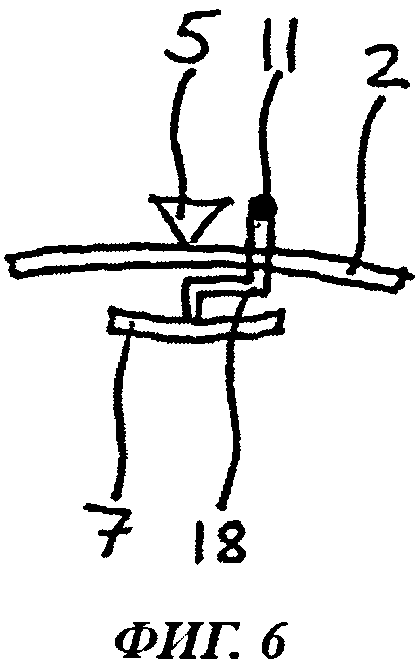
На фигуре 6 тяга 18 не проходит через ось 5 поворота. Вместо этого в данном варианте осуществления тяга 18 проходит через первую поверхность 2 управления в точке, расположенной справа от оси 5 поворота (как показано на фигуре 6). Тяга 18 состоит из трех частей.
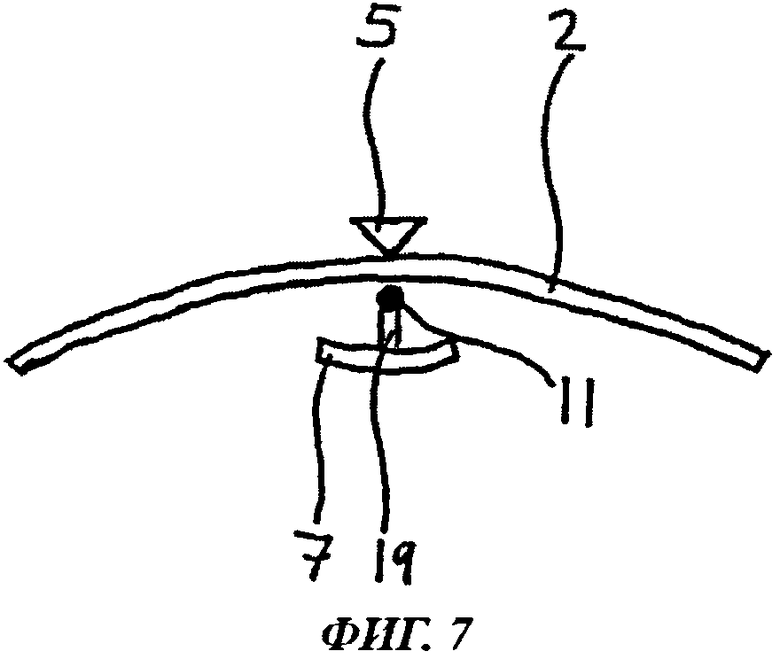
В варианте осуществления, показанном на фигуре 7, точка 11 поворота расположена перед первой поверхностью 2 управления, а тяга 19 не проходит через первую поверхность 2 управления. Поэтому тяга 19 может иметь сравнительно небольшую длину, что позволяет расположить точку 11 поворота позади поверхности педали 7 сцепления.
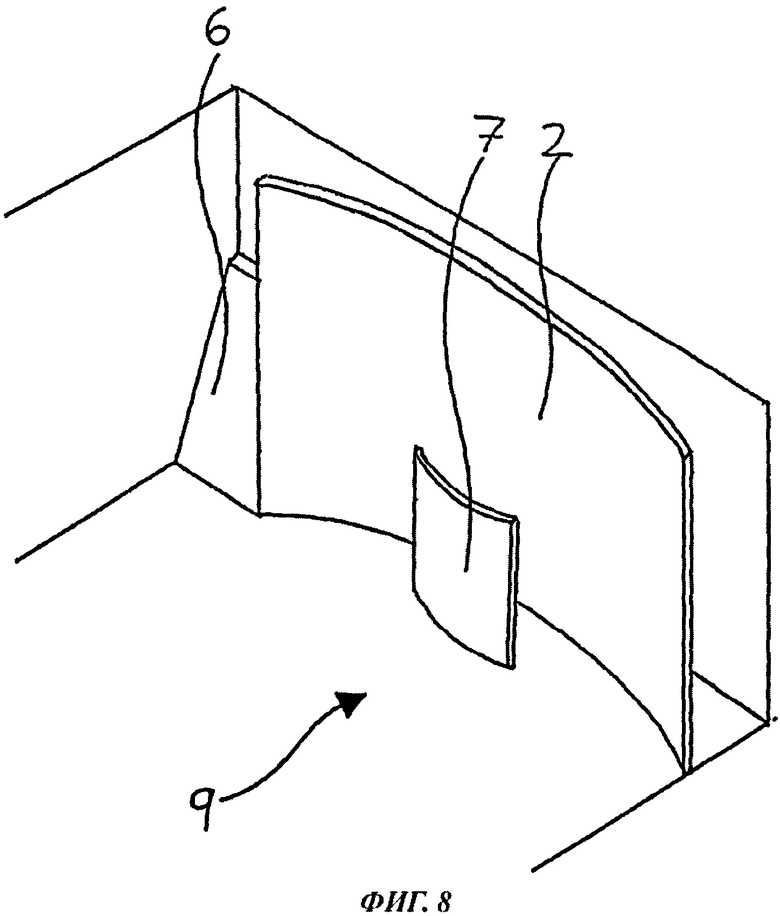
На фигуре 8 показаны первая поверхность 2 управления, педаль 7 сцепления и подножка 6, расположенные в углублении 9 для ног транспортного средства.
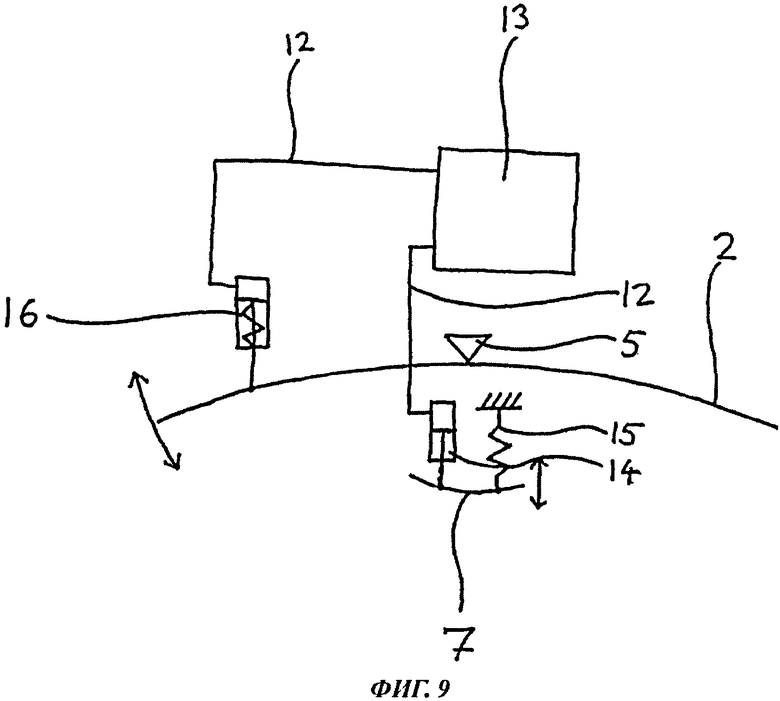
На фигуре 9 показаны поверхность 2 управления и педаль 7 сцепления согласно пятому варианту осуществления. Обе поверхности управления 2, 7 соединены с пневматической системой 13. Вторая поверхность 7 управления соединяется с пневматической системой 13 при помощи пневматического цилиндра 14 и трубопровода 12. Пружина 15 представляет собой смещающее устройство, которое обеспечивает возвращение второй поверхности управления в ненажатое состояние, когда действие силы давления прекращается.
Первая поверхность 2 управления соединяется с пневматической системой 13 при помощи пневматического упругого цилиндра 16. Он представляет собой комбинацию пневматического цилиндра с пружиной.
На фигуре 10 показан другой вариант осуществления педали или системы управления согласно изобретению. Система управления или педаль 100 включает элементы, аналогичные варианту осуществления, показанные на фигуре 2, при этом одинаковые элементы обозначены одними и теми же ссылочными номерами. Кроме того, система 100 управления включает линейный датчик 28 положения, присоединенный к задней стенке 26 углубления 9 для ног. Линейный датчик 28 положения присоединен также к поверхности 2 управления. Линейный датчик 28 положения измеряет расстояние между задней стороной поверхности 2 управления и задней стенкой 26 углубления 9 для ног. При этом, когда пользователь нажимает на первую сторону 3 поверхности 2 управления, расстояние между второй стороной 4 поверхности 2 управления и задней стенкой 26 увеличивается, и это расстояние измеряется линейным датчиком 28 положения. Аналогично этому, если пользователь нажимает на вторую сторону 4 поверхности 2 управления, расстояние между задней стороной поверхности 2 управления и задней стенкой 26 углубления 9 для ног уменьшается, и это расстояние также измеряется линейным датчиком 28 положения.
На фигуре 11 представлено схематическое изображение конструкции поверхности 100 управления, установленной в транспортном средстве. Как показано на фигуре 11, поверхность 100 управления присоединена к линейному датчику 28, показанному на фигуре 10. Линейный датчик 28, в свою очередь, присоединен к контроллеру 34. Контроллер 34 управляет ускорением и торможением транспортного средства и, таким образом, присоединен к тормозной системе 36 и к системе 38 набора скорости. Следует понимать, что тормозная система 36 и система 38 набора скорости, показанные на фигуре 11, являются известными специалистам в данной области техники и поэтому не описываются далее.
Когда поверхность 100 управления поворачивается вокруг оси 5 поворота, расстояние между поверхностью 2 управления и задней стенкой 26 углубления 9 для ног изменяется, как описано выше. Линейный датчик 28 измеряет это изменение расстояния и передает его в контроллер 34. Контроллер 34, непрерывно контролируя результаты измерения расстояния, поступающие от линейного датчика 28, может определять изменение направления, в котором поворачивается поверхность 2 управления. Иными словами, контроллер может определить, когда пользователь нажимает на противоположную сторону поверхности 2 управления.
Контроллер 34 реагирует на изменение направления поворота поверхности 2 управления путем переключения между системой 38 набора скорости и тормозной системой 36. В варианте осуществления, показанном на фигуре 10, первая сторона 3 поверхности 2 управления соединяется с системой 38 набора скорости, а вторая сторона 4 поверхности 2 управления соединяется с тормозной системой 36.
Если пользователь нажимает на первую сторону 3 поверхности 2 управления ногой 22, контроллер 34 включает систему 38 набора скорости. Если затем пользователь заставляет поверхность 2 управления начинать поворот в противоположном направлении, нажимая на вторую сторону 4 ногой 20, контроллер 34 определяет это изменение направления поворота и незамедлительно обеспечивает переключение с системы 38 набора скорости на тормозную систему 36.
Таким образом, контроллер может определять изменение направления поворота поверхности 2 управления и незамедлительно преобразовывать его в переключение между ускорением и торможением. Достоинство этого заключается в том, что в экстренной ситуации системе не требуется задержка, которая может быть связана с возвращением поверхности управления в нейтральную позицию и последующим включением тормозной системы, как это имеет место для поверхностей управления известного уровня техники.
Приведенное выше описание относится к переключению от ускорения к торможению, однако, следует понимать, что те же самые рассуждения можно применять к переключению от торможения и ускорению. Кроме того, в описанном выше варианте осуществления пользователь использует разные ноги для управления двумя сторонами поверхности 2 управления, однако, следует понимать, что пользователь может использовать одну ногу, перемещая ее между двумя сторонами 3 и 4 поверхности 2 управления.
Датчик углового положения может быть использован вместо линейного датчика 28 положения для измерения углового перемещения поверхности 2 управления. Кроме того, можно также использовать другие системы и датчики для измерения расстояния или величины угла поворота поверхности 2 управления.
На фигуре 12 схематически представлен вид сверху поверхности 2 управления и оси 5 поворота согласно одному варианту осуществления изобретения и показано функционирование поверхности управления. На фигуре 12 поверхность 2 управления показана в нейтральной позиции 2N, которую поверхность управления занимает, когда транспортное средство находится в неподвижном состоянии. Стрелка 40 указывает направление, в котором перемещается поверхность управления для создания ускорения. Аналогично этому стрелка 42 указывает направление, в котором перемещается поверхность 2 управления для создания торможения.
Позиция 2' на фигуре 12 представляет собой позицию максимального перемещения для создания ускорения. Иными словами, когда поверхность 2 управления достигает позиции 2', где сторона 3 поверхности управления упирается в заднюю стенку 26 углубления 9 для ног, поверхность 2 управления не может перемещаться дальше в этом направлении, поэтому такая позиция соответствует максимальному ускорению транспортного средства. Аналогично этому позиция 2" представляет собой позицию, соответствующую максимальному торможению транспортного средства, при этом сторона 4 упирается в заднюю стенку 26 углубления 9 для ног.
Как показано на фигуре 12, если поверхность управления находится в позиции 2N, максимальное линейное расстояние от обеих сторон поверхности управления, на которое может перемещаться поверхность управления, представляет собой расстояние HR, показанное на фигуре 12 штриховой линией. Однако? если поверхность управления находится в одной из позиций 2' или 2", максимальное линейное расстояние, на которое может перемещаться соответствующая сторона, представляет собой расстояние НM (также показанное на фигуре 12 штриховой линией).
Таким образом, контроллер 34 (как показано на фигуре 11) с учетом линейного или радиального определения позиции поверхности 2 управления (фигуры 9 и 10) использует всю доступную величину перемещения поверхности управления от позиции, в которой она вначале была нажата, как полное расстояние для всего диапазона торможения или ускорения транспортного средства. В другом варианте осуществления поверхность управления может быть использована в сочетании с электромеханическим согласующим устройством, описанным в заявке, которая была подана заявителем данной заявки одновременно с данной заявкой с присвоенным внутренним номером P525821GB.
В качестве примера допустим, что поверхность управления находится в позиции 2", показанной на фигуре 12, что вызывает торможение транспортного средства. Затем пользователь подает команду ускорения, нажимая на сторону 3 поверхности управления. Контроллер 34 определяет, что для перемещения доступно все расстояние Нм и наносит диапазон перемещения на этом расстоянии на степень ускорения, таким образом, весь динамический диапазон доступного ускорения представлен позициями поверхности управления, расположенными между позициями 2" и 2'. Аналогично этому, если сторона 3 нажата, когда поверхность управления находится в позиции 2N, контроллер 34 наложит доступное линейное расстояние HR на полный динамический диапазон команд ускорения.
Следует понимать, что это относится не только к крайним позициям, показанным на фигуре 12. Контроллер может преобразовывать все имеющиеся позиции в полный динамический диапазон, доступный для ускорения или торможения в каждом конкретном случае. Таким образом, любое переключение с ускорения на торможение или наоборот, будет интерпретироваться контроллером 34 соответствующим образом.
В другом варианте осуществления пневматическая система содержит отдельные пневматические системы для ускорения и торможения транспортного средства.
В других вариантах осуществления для обеих поверхностей 2, 7 управления может быть также предусмотрена амортизация. Амортизация может быть настроена таким образом, чтобы обеспечить соответствующую оптимальную тактильную реакцию водителя транспортного средства. Амортизация может быть реализована при помощи отдельных амортизирующих элементов, соединенных с поверхностями 2, 7 управления, или при помощи пневматической системы 13.
Группа изобретений относится к области транспортного машиностроения. Педаль для транспортного средства содержит первую поверхность управления и ось поворота. Первая поверхность управления выполнена с возможностью поворота вокруг указанной оси. Первая поверхность управления расположена перпендикулярно оси поворота, а ось поворота ориентирована параллельно средней линии пользователя. Поворот первой поверхности управления в первом направлении вокруг оси поворота связан с тормозной системой транспортного средства. Поворот первой поверхности управления во втором направлении вокруг оси поворота связан с системой набора скорости транспортного средства так, что обеспечивает торможение или ускорение транспортного средства. Первая поверхность управления выполнена с возможностью управления двумя ногами пользователя, когда они расположены с обеих сторон от средней линии пользователя. Система управления транспортным средством содержит систему набора скорости и тормозную систему. Система управления содержит упомянутую педаль и дополнительно содержит средство для определения изменения направления поворота первой поверхности управления. Система управления выполнена с возможностью переключения между торможением и ускорением, или с возможностью определения изменения направления поворота первой поверхности управления. Достигается повышение безопасности управления транспортным средством. 2 н. и 12 з.п. ф-лы, 12 ил.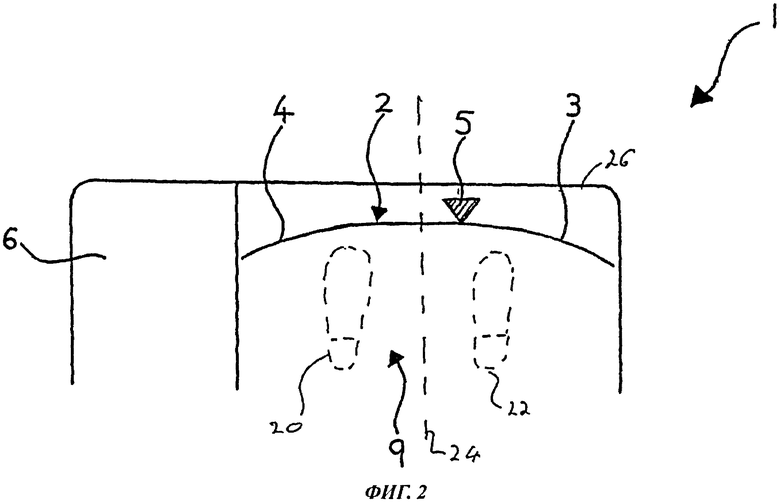
1. Педаль для транспортного средства, содержащая первую поверхность управления и ось поворота, причем первая поверхность управления выполнена с возможностью поворота вокруг указанной оси, при этом первая поверхность управления расположена перпендикулярно оси поворота, а ось поворота ориентирована, по существу параллельно средней линии пользователя, и поворот первой поверхности управления в первом направлении вокруг оси поворота связан с тормозной системой указанного транспортного средства, а поворот первой поверхности управления во втором направлении вокруг оси поворота связан с системой набора скорости транспортного средства так, что поворот первой поверхности управления вокруг оси поворота обеспечивает торможение или ускорение транспортного средства, при этом первая поверхность управления выполнена с возможностью управления двумя ногами пользователя, когда они расположены с обеих сторон от средней линии пользователя, причем первая нога обеспечивает поворот всей первой поверхности управления в первом направлении вокруг оси поворота, а вторая нога обеспечивает поворот всей первой поверхности управления во втором направлении вокруг оси поворота.
2. Педаль по п.1, отличающаяся тем, что диапазон перемещения первой поверхности управления в первом направлении для обеспечения торможения является динамическим.
3. Педаль по п.2, отличающаяся тем, что диапазон перемещения первой поверхности управления в первом направлении для обеспечения торможения зависит от позиции всей первой поверхности управления относительно оси поворота.
4. Педаль по одному из пп.1-3, отличающаяся тем, что диапазон перемещения первой поверхности управления во втором направлении для обеспечения ускорения является динамическим.
5. Педаль по п.4, отличающаяся тем, что диапазон перемещения первой поверхности управления во втором направлении для обеспечения ускорения зависит от позиции всей первой поверхности управления относительно оси поворота.
6. Педаль по одному из пп.1-3, отличающаяся тем, что содержит также педаль сцепления, при этом педаль сцепления расположена между первой поверхностью управления и водителем транспортного средства.
7. Педаль по п.6, отличающаяся тем, что педаль сцепления расположена между осью поворота и местоположением пользователя.
8. Педаль по одному из пп.1-3, отличающаяся тем, что первая поверхность управления является вогнутой по отношению к пользователю.
9. Педаль по одному из пп.1-3, отличающаяся тем, что первая поверхность управления ориентирована, по существу, вертикально по отношению к ориентации пользователя.
10. Педаль по одному из пп.1-3, отличающаяся тем, что ось поворота ориентирована, по существу, перпендикулярно поверхности пола транспортного средства.
11. Система управления транспортным средством, содержащим систему набора скорости и тормозную систему, причем система управления содержит педаль по одному из пп.1-10 и дополнительно содержит средство для определения изменения направления поворота первой поверхности управления и выполнена с возможностью переключения между торможением и ускорением и наоборот, или с возможностью определения изменения направления поворота первой поверхности управления.
12. Система управления по п.11, отличающаяся тем, что средство для определения изменения направления поворота первой поверхности управления содержит средство для определения расстояния между первой поверхностью управления и углублением для ног в транспортном средстве.
13. Система управления по п.11, отличающаяся тем, что средство для определения изменения направления поворота первой поверхности управления содержит линейный датчик положения.
14. Система управления по п.11, отличающаяся тем, что средство для определения изменения направления поворота первой поверхности управления содержит датчик углового положения.
| DE 4405111 A1, 24.08.1995 | |||
| US 3386541 A, 04.06.1968 | |||
| УСТРОЙСТВО ПЕДАЛЕЙ ТОРМОЗА И АКСЕЛЕРАТОРА ДЛЯ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 1990 |
|
RU2013228C1 |
| Система управления транспортным средством | 1983 |
|
SU1113293A1 |

