Область техники, к которой относится изобретение
Варианты осуществления изобретения относятся к обеспечению интерфейса между электрической системой и механической системой. Некоторые варианты осуществления изобретения относятся к обеспечению интерфейса между рулевым устройством с механическим управлением и механизмом с электрическим управлением для применения в транспортном средстве, в частности, в качестве механизма рулевого управления.
Уровень техники
Как известно, механическое перемещение можно преобразовывать в изменение электрических характеристик. Однако в случае преобразования механического перемещения в двух направлениях, по существу, противоположных друг другу, в электрические сигналы и их использования в качестве сигналов управления, в частности, в механизмах рулевого управления транспортных средств, ранее для преобразования такого перемещения в электрический сигнал использовалась только одна электрическая характеристика, что является ненадежным и не обеспечивает достаточной динамичности управления.
Раскрытие изобретения
Один вариант осуществления изобретения представляет собой интерфейс, предназначенный для преобразования поворотного движения в электрические сигналы и содержащий:
механический привод, выполненный с возможностью совершения поворотных движений в первом направлении и во втором направлении;
первый и второй электрические компоненты, соединенные с приводом и выполненные таким образом, что поворот привода в первом направлении вызывает изменения электрических характеристик первого электрического компонента, а поворот привода во втором направлении вызывает изменения электрических характеристик второго электрического компонента;
при этом первый и второй электрические компоненты соединены с одной или более электрическими цепями, поэтому поворот привода в первом и втором направлениях вызывает изменения в одной или более электрических цепях.
Привод может представлять собой вал, а первый и второй электрические компоненты могут быть установлены на валу.
Поворот вала может вызывать изменения электрических характеристик электрических компонентов.
Первый и второй электрические компоненты могут быть установлены с возможностью свободного поворота в направлении, противоположном направлению поворота, которое вызывает изменение электрических характеристик соответствующего компонента.
Интерфейс может также содержать средство, способствующее перемещению указанного первого и указанного второго электрических компонентов в направлении, противоположном направлению, которое вызывает изменение электрических характеристик соответствующего электрического компонента.
Интерфейс может также содержать одну или более муфт одностороннего поворота для соединения привода с первым и вторым электрическими компонентами.
Первый и второй электрические компоненты могут представлять собой переменные резисторы.
Каждый переменный резистор может содержать контактный элемент и резистор, расположенные таким образом, что сопротивление переменного резистора изменяется в зависимости от положения указанного контактного элемента относительно указанного резистора, при этом каждый переменный резистор может быть выполнен таким образом, что один элемент из группы контактный элемент - резистор является неподвижным относительно вала, а другой элемент из группы резистор -контактный элемент выполнен с возможностью перемещения во время движения указанного вала.
Другой аспект изобретения относится к механизму рулевого управления, содержащему описанный здесь интерфейс, при этом указанный привод соединен с рулевым колесом.
Механизм рулевого управления может также содержать систему рулевого управления, которая имеет первое крайнее положение, нейтральное положение и второе крайнее положение, при этом первое и второе крайние положения соответствуют изменению направления движения, а указанное нейтральное положение соответствует постоянному направлению движения, и при этом изменение направления поворота указанного привода вызывает автоматический переход указанной системы рулевого управления из позиции между одним крайним положением и нейтральным положением в позицию между нейтральным и другим крайним положением.
Механизм рулевого управления может также содержать средство для обнаружения аварийной ситуации, при этом указанная система рулевого управления автоматически выполняет указанное изменение положения в ответ на обнаружение указанным средством аварийной ситуации.
Другой аспект изобретения относится к механизму рулевого управления, содержащему систему рулевого управления, которая имеет первое крайнее положение, нейтральное положение и второе крайнее положение, при этом первое и второе крайние положения соответствуют радикальному изменению направления движения, а указанное нейтральное положение соответствует постоянному направлению движения, и при этом изменение направления поворота указанного привода вызывает автоматический переход указанной системы рулевого управления из позиции между одним крайним положением и нейтральным положением в позицию между нейтральным и другим крайним положением.
Еще один аспект изобретения относится к управляющему механизму, предназначенному для подачи сигнала управления и содержащему контроллер, который имеет первое крайнее положение, нейтральное положение и второе крайнее положение, при этом первое и второе крайние положения соответствуют первому и второму сигналам управления, и указанный первый сигнал управления является противоположным указанному второму сигналу управления, а позиции указанного контроллера между указанными крайними положениями соответствуют сигналам управления различной степени, и при этом указанный управляющий механизм выполнен с возможностью преобразования изменения направления движения контроллера в автоматическую смену первого сигнала управления на второй сигнал управления или второго сигнала управления на первый сигнал управления.
Первый сигнал управления может представлять собой ускорение, а второй сигнал управления - торможение.
Первый сигнал управления может относиться к выполнению левого поворота, а второй сигнал управления - к выполнению правого поворота.
Нейтральное положение может соответствовать отсутствию подачи сигнала управления.
Механизм рулевого управления может также содержать средство для обнаружения аварийной ситуации, при этом указанная система рулевого управления выполнена с возможностью автоматического изменения ее позиции в ответ на обнаружение указанным средством аварийной ситуации.
Еще один аспект изобретения относится к транспортному средству, содержащему описанный здесь механизм рулевого управления.
Следующий аспект изобретения относится к способу преобразования поворотного движения в электрический сигнал, при этом указанный способ содержит:
изменение электрической характеристики первого электрического компонента в соответствии с первым движением;
изменение электрической характеристики второго электрического компонента в соответствии со вторым движением; при этом
указанное первое и указанное второе движения представляют собой поворотное движение, причем указанное второе движение происходит, по существу, в противоположном направлении относительно указанного первого движения.
Способ может также включать обеспечение вала, на котором установлены первый и второй электрические компоненты и который поворачивают для того, чтобы вызывать изменения электрических характеристик первого и второго электрических компонентов.
Первый и второй электрические компоненты могут быть установлены на указанном валу, поэтому поворот вала в первом направлении вызывает изменение характеристики первого компонента, а поворот вала во втором направлении вызывает изменение характеристики второго компонента.
Первый и второй компоненты могут быть установлены с возможностью свободного поворота вокруг вала в направлении, противоположном направлению, которое вызывает изменение электрической характеристики соответствующего электрического компонента.
Электрическая характеристика первого компонента может быть той же самой, что и электрическая характеристика второго компонента.
Электрическая характеристика может представлять собой сопротивление.
Краткое описание чертежей
Примеры вариантов осуществления изобретения описаны ниже со ссылками на прилагаемые чертежи, которые выполнены не в масштабе и на которых представлены:
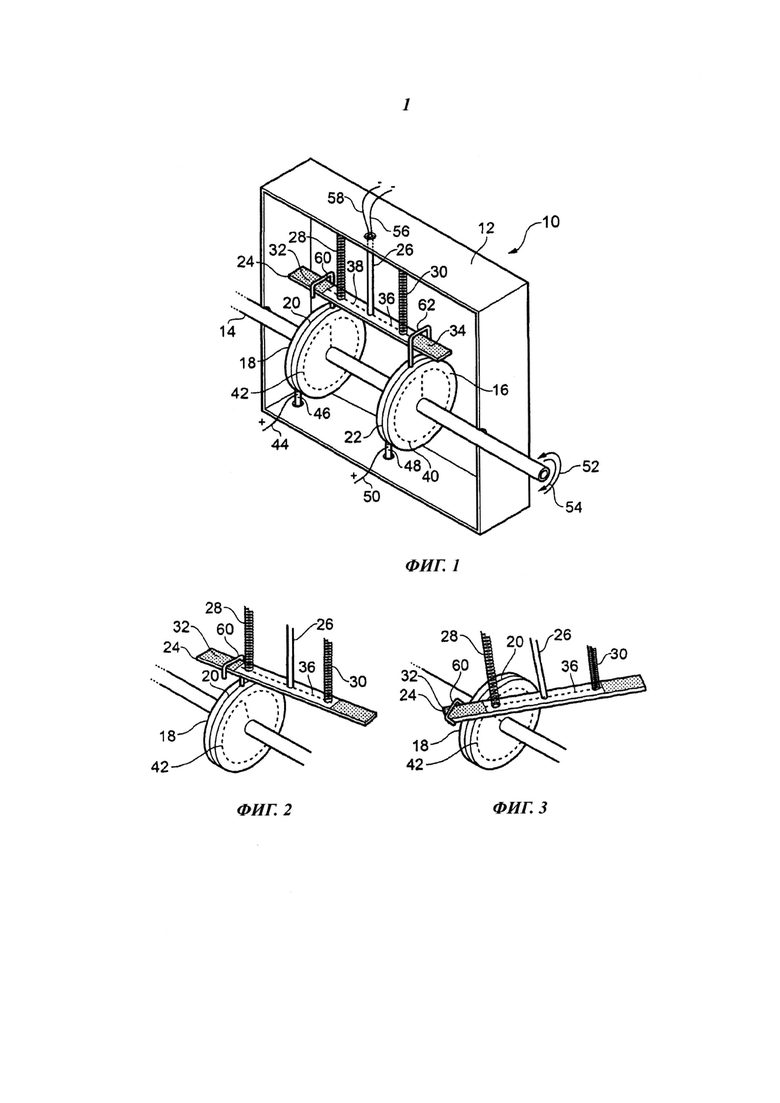
фигура 1 - вид в перспективе интерфейса согласно первому варианту осуществления изобретения;
фигура 2 - вид в перспективе части интерфейса с фигуры 1, показывающий смещение контактной шины интерфейса во время работы;
фигура 3 - вид в перспективе части интерфейса с фигуры 1, представленной на фигуре 2, показывающий дальнейшее смещение шины во время работы;
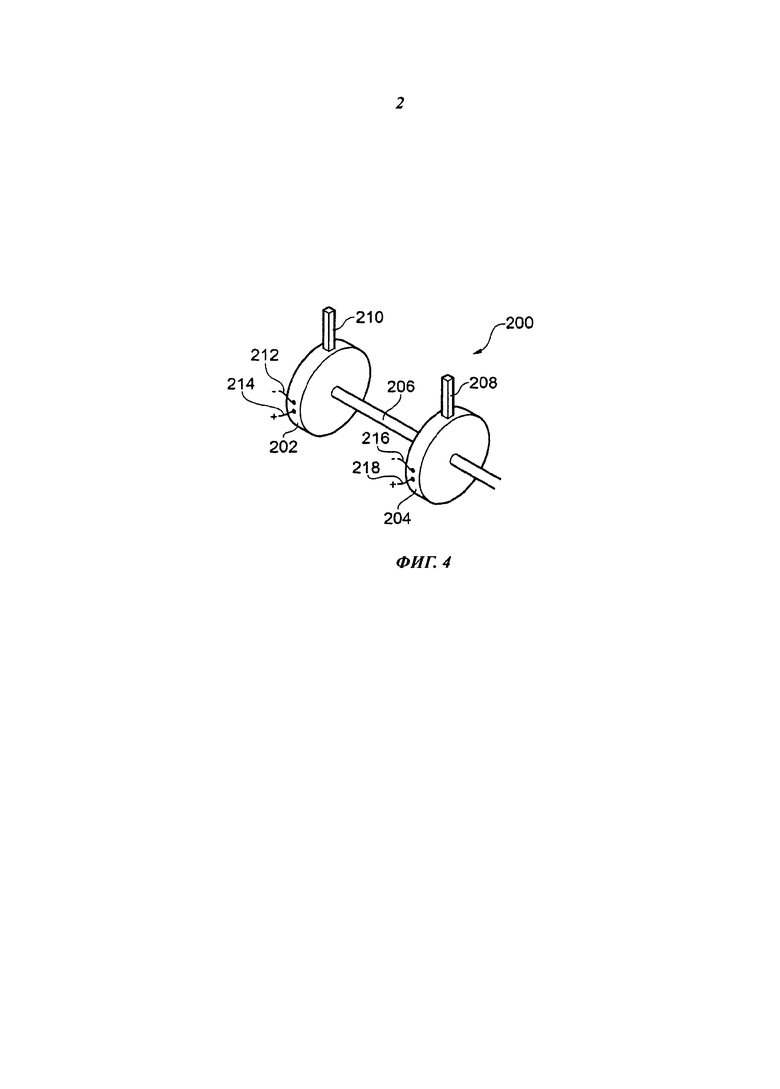
фигура 4 - вид в перспективе интерфейса согласно другому варианту осуществления изобретения;
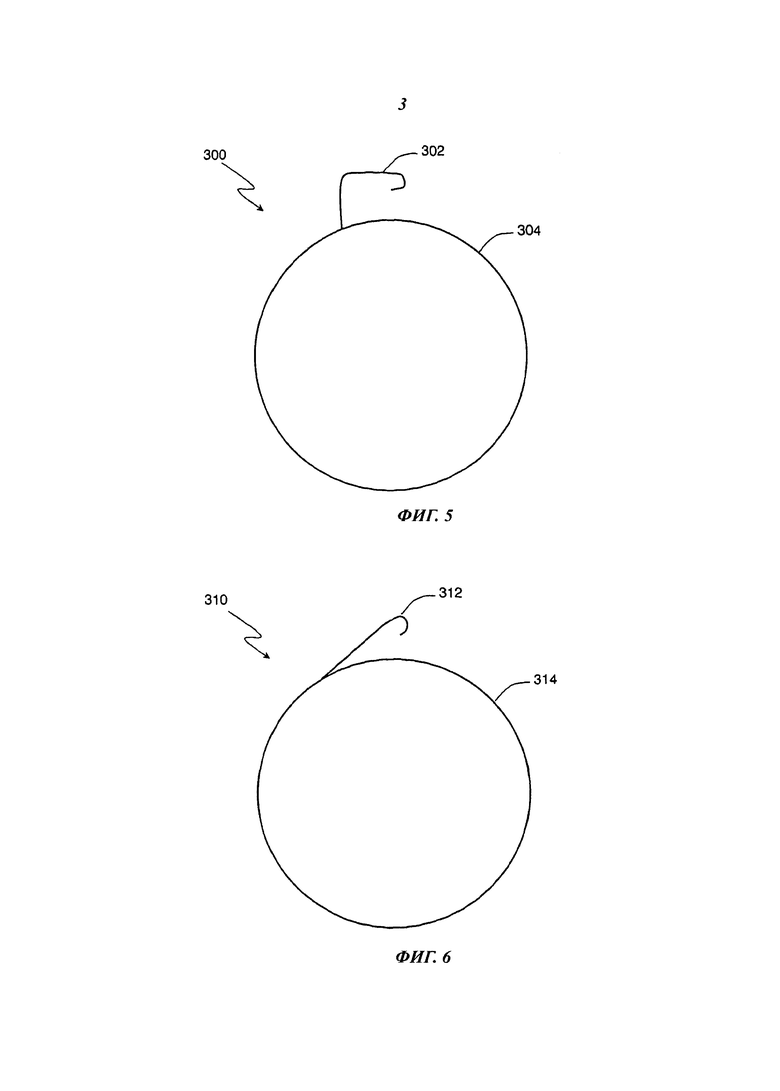
фигура 5 - схематическое изображение альтернативной конструкции диска и крюка для применения с вариантами осуществления изобретения; и
фигура 6 - схематическое изображение альтернативной конструкции диска и крюка для применения с вариантами осуществления изобретения.
Осуществление изобретения
На фигуре 1 показан вид в перспективе интерфейса 10 согласно одному варианту осуществления изобретения. Интерфейс 10 содержит корпус 12, который показан в разрезе на фигуре 1. Полый вал 14 установлен в корпусе 12 с возможностью поворота в первом направлении, обозначенном стрелкой 52, и во втором направлении, обозначенном стрелкой 54, и, таким образом, обеспечивает привод для интерфейса 10. Как показано на чертеже, направление 52 поворота является противоположным направлению 54 поворота.
На валу 14 установлено два диска 16 и 18. Каждый из дисков установлен на валу 14 таким образом, чтобы поворот вала в одном направлении вызывал движение одного из дисков, в то время как поворот в другом направлении вызывал движение другого диска. В данном варианте осуществления это обеспечивается муфтами одностороннего поворота. Таким образом, диск 18 поворачивается вместе с валом, когда вал поворачивается в направлении стрелки 52, однако, он может свободно поворачиваться относительно вала в направлении стрелки 54. Аналогично этому диск 16 поворачивается вместе с валом, когда вал поворачивается в направлении стрелки 54, однако, он может свободно поворачиваться относительно вала в направлении стрелки 52.
Диск 16 включает также проводник 22, расположенный вдоль окружности диска. Контакт 48 присоединен к корпусу и, в свою очередь, включает вывод 50. Контакт 48 обеспечивает электрическое соединение между выводом 50 и проводником 22. Как показано штриховой линией, диск 16 содержит также пружину 40. Пружина 40 способствует возвращению диска 16 в позицию, показанную на фигуре 1, после поворота под действием вала 14.
Аналогично этому диск 18 включает проводник 20, который имеет электрическое соединение с контактом 46, присоединенным к выводу 44, и пружину 42, создающую смещение при движении диска 18. Пружина 42 (показана прерывистой линией) способствует возвращению диска 18 в позицию, показанную на фигуре 1, после поворота под действием вала 14.
Контактная шина 24 прикреплена к корпусу 12 при помощи стойки 26 подвески и установлена таким образом, что она может качаться и поворачиваться относительно корпуса 12. Контактная шина 24 соединяется корпусом 12 пружинами 28 и 30. Кроме того, контактная шина 24 включает две зоны 32, 34 электрического контакта, расположенных вблизи соответствующих концов шины 24 на участках, соответствующих дискам 16 и 18, как более подробно поясняется ниже. Вывод 36 соединяется с контактной зоной 32 и с выводом 58, проходящим в стойке 26 подвески. Аналогично этому вывод 38 соединяется с контактной зоной 34 и с выводом 56, также проходящим в стойке 26 подвески. Оба вывода 36 и 38 вмонтированы в контактную шину 24 и поэтому обозначены на фигуре 1 прерывистыми линиями.
Диск 18 содержит также крюк 60, который поворачивается вместе с диском 18 под действием вала 14 или пружины 42. Крюк 60 служит для сцепления с контактной зоной 32 контактной шины 24, когда диск 18 поворачивается в направлении против часовой стрелки после позиции, показанной на фигуре 1. Аналогично этому диск 16 включает крюк 62, который поворачивается вместе с диском 16 и служит для сцепления с контактной зоной 34 контактной шины 24, когда диск 16 поворачивается в направлении по часовой стрелке после позиции, показанной на фигуре 1.
Ниже приведено описание функционирования интерфейса 10 со ссылками на фигуры 1, 2 и 3. Когда вал 14 поворачивается в направлении стрелки 52, он входит в зацепление с диском 18 при помощи муфты одностороннего поворота, установленной между ними (не показана на чертеже), заставляя диск 18 поворачиваться в том же направлении. Это, в свою очередь, заставляет крюк 60 поворачиваться вместе с диском 18. Когда крюк 60 перемещается, он захватывает соединительную шину 24, сдвигая часть шины 24 вниз к диску 18, как показано на фигуре 2. Диск 18 продолжает поворачиваться, обеспечивая контакт между контактной зоной 32 контактной шины 24 и соединительным элементом 20 на диске 18, как показано на фигуре 3.
Когда между контактной зоной 32 и соединительным элементом 20 возникает контакт, между выводом 58, выводом 38, контактной зоной 32, соединительным элементом 20, контактом 46 и выводом 44, образуется замкнутая цепь. Кроме того, сопротивление соединительного элемента 20 предварительно установлено, поэтому указанный соединительный элемент действует в качестве переменного резистора, и его сопротивление зависит от местоположения электрических контактов на его длине. Поскольку диск 18 продолжает поворачиваться, длина соединительного элемента 20 между соединительной шиной 24 и контактом 46 уменьшается, уменьшая при этом сопротивление участка цепи, содержащего соединительный элемент 20. Таким образом, поворот вала 14 в направлении стрелки 52 приводит к изменению сопротивления электрического компонента (участка цепи, содержащего соединительный элемент 20).
Аналогично этому поворот вала 14 в направлении стрелки 54 приводит к изменению сопротивления соединительного элемента 22 на диске 16.
Когда диск 18, например, поворачивается, крюк 60, шина 24, крюк 62, пружины 28 и 30 и стойка 26 устанавливаются таким образом, что диск 16 будет поворачиваться в том же самом направлении под действием шины 24. При этом, когда вал 14 поворачивается в противоположном направлении, шина 34 быстро вступает в контакт с соединительным элементом 22.
Если вал 14 поворачивается в направлении стрелки 54, пружина 42 оказывает влияние на движение диска 18, поскольку сцепление между валом 14 и диском 18 отсутствует, когда диск поворачивается в этом направлении. Таким образом, действие намотанной пружины 42, соединяющей диск 18 с валом 14, способствует возврату диска в его нейтральное положение (т.е. в позицию, показанную на фигуре 1).
Когда вал 14 поворачивается в направлении стрелки 52, диск 16 свободно перемещается относительно вала, и в этой ситуации на движение диска 16 оказывает влияние намотанная пружина 40, которая способствует возврату диска 16 в его нейтральное положение (т.е., в позицию, показанную на фигуре 1), когда вал 14 не входит в зацепление с диском 16.
Соединительная шина 24 присоединена к корпусу 12 пружинами 28 и 30, которые расположены вблизи соответствующих концов шины 24. Эти пружины 28 и 30 способствуют возврату шины в нейтральное положение (позиция, показанная на фигуре 1). Во время работы интерфейса 10 пружины 28 и 30 помогают стабилизировать интерфейс 10 и ограничивают движение дисков 16 и 18.
Электрические выводы 44 и 50, а также 56 и 58 могут быть соединены с другими электрическими компонентами и образовывать часть большей цепи. Достоинства вариантов осуществления изобретения описаны применительно к системе рулевого управления транспортного средства, однако, следует понимать, что другие варианты осуществления изобретения можно использовать в любой ситуации, где требуется, чтобы поворот в каком-либо направлении оказывал определенное влияние на электрическую характеристику.
Если интерфейс 10 установлен как часть механизма рулевого управления, вал 14 снабжен рулевым устройством, в частности рулевым колесом (не показано). При этом выводы 44, 50, 56 и 58 соединяются с цепью, которая управляет направлением движения транспортного средства. Если указанный механизм рулевого управления установлен, например, в автомобиле, то этот механизм рулевого управления может управлять углом поворота передних колес автомобиля относительно поверхности, по которой перемещаются эти колеса, а также управлять скоростью, с которой колеса поворачиваются, чтобы достичь этого угла.
Интерфейс согласно вариантам осуществления настоящего изобретения предпочтительно может преобразовывать определенное изменение электрической характеристики (в варианте осуществления, показанном на фигуре 1) сопротивления в перемещение рулевого колеса в каком-либо направлении. Поэтому в случае осуществления поворота с электрическим управлением, величина управляющего воздействия и реакция механизма рулевого управления являются оптимизированными по сравнению с известными системами. Кроме того, достоинство вариантов осуществления изобретения, применяемых в рулевом управлении и в других областях, заключается в том, что перемещение привода в противоположном направлении можно незамедлительно преобразовать в кардинальное изменение направления. Так, например, правый поворот можно незамедлительно преобразовать в левый поворот, если привод перемещается в противоположном направлении. Поэтому пользователю не нужно тратить силы или время для того, чтобы поворачивать рулевое колесо обратно в нейтральную позицию; изменение направления поворота рулевого колеса можно незамедлительно преобразовывать в соответствующий сигнал для значительного изменения направление движения транспортного средства.
Таким образом, следует понимать, что вышеуказанные варианты осуществления изобретения имеют преимущество над известными системами, в которых рулевое колесо (или другой механизм, используемый для управления направлением движения) необходимо сначала повернуть в нейтральное положение перед тем, как совершить кардинальное изменение направления движения (т.е., например, с левого поворота на правый поворот).
При этом другие варианты осуществления изобретения относятся к известному механизму рулевого управления, в частности, к системе управления с помощью электроники, в которой предусмотрено электронное управление направлением движения. Механизм рулевого управления в этом случае, как правило, содержит орган управления, в частности, рулевое колесо, которое необходимо возвращать в нейтральное положение перед тем, как кардинально изменить направление движения. В таких вариантах осуществления известный механизм рулевого управления объединяют, например, с детектором аварийной ситуации, который может измерять, например, замедление транспортного средства или силу, с которой было повернуто рулевое колесо. Механизм рулевого управления согласно такому варианту осуществления может функционировать в двух режимах: нормальный режим, в котором поворот рулевого колеса в противоположном направлении сначала возвращает механизм рулевого управления в нейтральное положение, и в аварийном режиме, в котором поворот рулевого колеса в противоположном направлении автоматически заставляет механизм рулевого управления обеспечивать поворот транспортного средства в противоположном направлении.
Следует понимать, что в аварийной ситуации пользователь прилагает значительную силу для поворота рулевого колеса, которая передается на вал 14 в варианте осуществления, показанном на фигуре 1. Эта сила является достаточной для того, чтобы преодолеть силу, прикладываемую пружиной 40 или 42 в направлении, противоположном указанному направлению поворота. Кроме того, шина 24 находится в таком положении, что, когда диск 16 или 18 поворачивается, поворот в противоположном направлении заставляет шину быстро входить в зацепление с контактным элементом (20 или 22), соответствующим смещению направления поворота вала. При таких обстоятельствах у пользователя нет необходимости активно возвращать рулевое колесо в нейтральное положение. Вместо этого вал 14 возвращается в нейтральное положение под действием пружин 40 и 42. Силу, действующую в противоположном направлении, требуется прикладывать только в аварийной ситуации.
Кроме того, в альтернативном варианте осуществления вал 14 с фигуры 1 может приводить в движение диск 18 (например) только в том случае, если рулевое колесо, соединенное с валом 14, активируется со значительной силой. При этом участок цепи, соответствующий диску 18, можно использовать для управления тормозной системой. Следует понимать, что другие варианты осуществления изобретения можно использовать для любых систем управления, в которых требуется определенное изменение электрической характеристики в ответ на перемещение в каждом из двух противоположных направлений. Так, например, для управления ускорением и торможением транспортного средства можно использовать вариант осуществления изобретения, в котором линейное перемещение назад и вперед преобразуется в ускорение и торможение путем соединения с соответствующими системами ускорения и торможения, которые поставляются на рынок под торговой маркой "Relative Acceleration and Braking System (RABS) Technology".
На фигуре 4 показан вид в перспективе интерфейса 200 согласно другому варианту осуществления изобретения. Интерфейс 200 включает вал 206, на котором установлены с возможностью поворота два переменных резистора 202 и 204. Соединения между поворотными переменными резисторами и валом 206 выполнены таким образом, что поворот вала в одном направлении приводит к увеличению сопротивления резистора 202, в то время как поворот вала в другом направлении приводит к увеличению сопротивления резистора 204.
Кроме того, резистор 202 снабжен выводами 212 и 214, которыми он соединяется с электрической цепью. Резистор 202 соединяется также с корпусом (не показано) при помощи стойки 210. Стойка 210 обеспечивает закрепление переменного резистора, чтобы предотвратить его перемещение относительно вала 206. Аналогично этому резистор 204 снабжен выводами 216 и 218, которыми он соединяется с электрической цепью, и стойкой 208, которая закрепляет его, чтобы предотвратить перемещение относительно вала 206.
На фигуре 4 показан вариант осуществления изобретения, который можно использовать с двумя известными переменными резисторами, выполненными таким образом, чтобы их сопротивления увеличивались при соответствующих поворотах вала 206 в противоположных направлениях.
Такие варианты осуществления, как показанный на фигуре 4, позволяют относительно экономично и просто реализовать аспекты изобретения, однако они не обеспечивают такой реакции или гибкости, как вариант осуществления, показанный на фигуре 1.
На фигуре 5 схематически показана альтернативная конструкция 300 диска 304 и крюка для применения с вариантами осуществления изобретения. Аналогично этому на фигуре 6 схематически показана альтернативная конструкция 310 диска 314 и крюка 312 для применения с вариантами осуществления изобретения. Обе конструкции, показанные на фигурах 5 и 6, помогают обеспечить зацепление шины 24 (см. фиг.1-3) с соответствующими крюками 302 и 312 и выполнены таким образом, что, когда вал поворачивается в противоположном направлении, контактный элемент другого диска вступает в контакт с шиной, позволяя, таким образом, быстро и кардинально изменять направление движения.
В иллюстрированных и описанных здесь вариантах осуществления изобретения сопротивление является электрической характеристикой, которая изменяется при поворотном (или другом) движении. Однако следует понимать, что изобретение не имеет ограничений в этом отношении. Вместо сопротивления можно использовать другие электрические характеристики, в частности индуктивность или емкость, и обеспечить соответствующие цепи для реализации таких вариантов осуществления.
Кроме того, в показанных вариантах осуществления вал поворачивается относительно корпуса, чтобы создать необходимое перемещение. Однако в альтернативном варианте осуществления корпус может поворачиваться относительно неподвижно закрепленного вала (или другого элемента), и при этом рулевое колесо или другой управляющий механизм соединяется с корпусом.
В других вариантах осуществления интерфейсы могут преобразовывать в электрические сигналы движение более чем в двух направлениях. В таких вариантах осуществления может быть использован электрический компонент, соответствующий каждому направлению движения.
Группа изобретений раскрывает механизм рулевого управления, включающий интерфейс для преобразования поворотного движения в электрические сигналы, и содержит механический привод, который может поворачиваться в первом направлении и во втором направлении, при этом первый и второй электрические компоненты соединены с приводом и выполнены таким образом, чтобы поворот привода в первом направлении вызывал изменения электрических характеристик первого электрического компонента, а поворот привода во втором направлении вызывал изменения электрических характеристик второго электрического компонента. Первый и второй электрические компоненты соединены с одной или более электрическими цепями таким образом, чтобы поворот привода в первом и втором направлениях вызывал изменения в одной или более электрических цепях. Раскрыты также способ преобразования поворотного движения механизма рулевого управления в электрический сигнал и транспортное средство, содержащее рассмотренный выше механизм рулевого управления. Технический результат заключается в повышении надежности и динамичности механизма рулевого управления за счет возможности перехода указанной системы рулевого управления из позиции между одним крайним положением и нейтральным положением в позицию между нейтральным и другим крайним положением без перехода в нейтральное положение. 3 н. и 9 з.п. ф-лы, 6 ил. 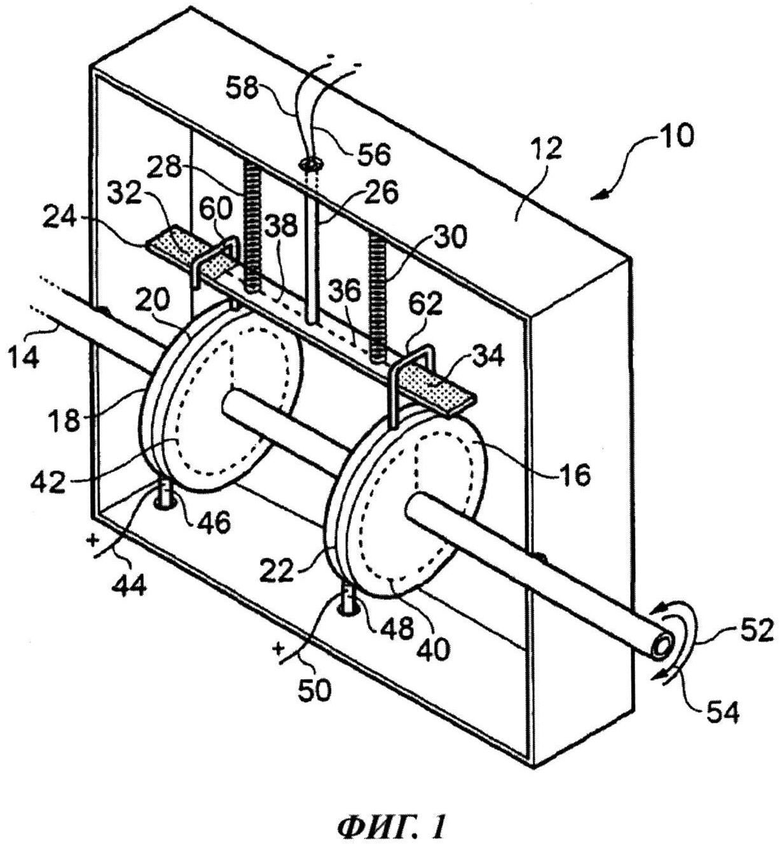
1. Механизм рулевого управления, включающий интерфейс для преобразования поворотного движения в электрические сигналы, содержащий:
механический привод, соединенный с рулевым колесом и выполненный с возможностью совершения поворотных движений в первом направлении и во втором направлении;
первый и второй электрические компоненты, соединенные с приводом и выполненные таким образом, что поворот привода в первом направлении вызывает изменения электрических характеристик первого электрического компонента, а поворот привода во втором направлении вызывает изменения электрических характеристик второго электрического компонента;
при этом первый и второй электрические компоненты соединены с одной или более электрическими цепями таким образом, что поворот привода в первом и втором направлениях вызывает изменения в одной или более электрических цепях,
и первый и второй электрические компоненты выполнены с возможностью свободного поворота в направлении, противоположном направлению поворота, которое вызывает изменение электрических характеристик соответствующего компонента,
причем привод представляет собой вал, при этом первый и второй электрические компоненты установлены на указанном валу.
2. Механизм рулевого управления по п. 1, отличающийся тем, что поворот вала вызывает изменения электрических характеристик электрических компонентов.
3. Механизм рулевого управления по п. 1, отличающийся тем, что указанный интерфейс содержит также средство, способствующее перемещению указанного первого и указанного второго электрических компонентов в направлении, противоположном направлению, которое вызывает изменение электрических характеристик соответствующего электрического компонента.
4. Механизм рулевого управления по п. 1, отличающийся тем, что указанный интерфейс содержит также одну или более муфт одностороннего поворота для соединения привода с указанным первым и указанным вторым электрическими компонентами.
5. Механизм рулевого управления по п. 1, отличающийся тем, что первый и второй электрические компоненты представляют собой переменные резисторы.
6. Механизм рулевого управления по п. 5, отличающийся тем, что каждый переменный резистор содержит контактный элемент, и резистор, расположенные таким образом, что сопротивление переменного резистора изменяется в зависимости от положения указанного контактного элемента относительно указанного резистора, при этом каждый переменный резистор выполнен таким образом, что один элемент из группы контактный элемент - резистор является неподвижным относительно вала, при этом другой элемент из группы резистор - контактный элемент выполнен с возможностью перемещения во время движения указанного вала.
7. Механизм рулевого управления по одному из п.п. 1-6, отличающийся тем, что указанный механизм содержит также систему рулевого управления, имеющую первое крайнее положение, нейтральное положение и второе крайнее положение, при этом первое и второе крайние положения соответствуют радикальному изменению направления движения, а указанное нейтральное положение соответствует постоянному направлению движения, при этом изменение направления поворота указанного привода вызывает автоматический переход указанной системы рулевого управления из позиции между одним крайним положением и нейтральным положением в позицию между нейтральным и другим крайним положением.
8. Механизм рулевого управления по п. 7, отличающийся тем, что указанный механизм содержит также средство для обнаружения аварийной ситуации, при этом указанная система рулевого управления выполнена с возможностью автоматического обеспечения изменения ее позиции в ответ на показание указанного средства для обнаружения аварийной ситуации.
9. Транспортное средство, содержащее механизм рулевого управления по одному из пп. 1-8.
10. Способ преобразования поворотного движения механизма рулевого управления в электрический сигнал, содержащий:
обеспечение вала, на котором установлены первый и второй электрические компоненты таким образом, что поворот вала в первом направлении изменяет электрическую характеристику первого электрического компонента, а поворот вала во втором направлении, противоположном первому направлению, изменяет электрическую характеристику второго электрического компонента;
при этом первый и второй компоненты установлены с возможностью свободного поворота вокруг вала в направлении, противоположном направлению, вызывающему изменение электрической характеристики соответствующего электрического компонента.
11. Способ по п. 10, отличающийся тем, что электрическая характеристика первого компонента является той же самой, что и электрическая характеристика второго компонента.
12. Способ по п. 11, отличающийся тем, что указанная электрическая характеристика представляет собой сопротивление.
| US 5276722 A1 04.01.1994 | |||
| US 5276722 A1 04.01.1994 | |||
| Устройство для контроля направления вращения и измерения угла поворота | 1985 |
|
SU1339452A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОВОРОТОМ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2388631C2 |
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| US 20080007251 A1 10.01.2008 | |||
| US 7208939 B2 24.04.2007. | |||

