Настоящее раскрытие изобретения относится к способу и узлу сети в беспроводной сети связи. В частности, оно относится к управлению максимальной выходной мощностью узла сети, расположенного в беспроводной сети связи.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Фемто-базовая станция или так называемая домашняя базовая станция недавно привлекла большой интерес в беспроводной индустрии. Процесс стандартизации для домашней базовой станции продолжается в 3GPP для обоих - Развитой универсальной наземной сети радиодоступа (E-UTRA) и IEEE 802.16. Для UTRA домашняя базовая станция была стандартизована в версии 8. Однако в обоих - UTRA и E-UTRA расширенные функциональные возможности, относящиеся к домашней базовой станции, такие как процедуры мобильного доступа, управление интерфейсом и управление домашней базовой станцией и т.д. также являются представленными для будущих версий. Фемто-базовые станции уже находятся в эксплуатации в других технологиях, таких как технологии GSM и 3GPP2 CDMA (например, CDMA2000 1xRTT и Высокоскоростная Пакетная Передача Данных (HRPD)).
Фемто-базовая станция, например, домашняя NodeB с дуплексом с частотным разделением/дуплексом с временным разделением (FDD/TDD), TDD/FDD домашний eNB, GSM домашняя BS, CDMA2000 1x домашняя BS, HRPD домашняя BS, IEEE 802.16 домашняя базовая станция или точка доступа и т.д., может быть размещена в доме или в публичных/частных помещениях, таких как торговые центры, офисные здания и т.д. Фемто-базовая станция может использовать одну и ту же линию совместно с другими макро/микро/пико-базовыми станциями, т.е. не фемто-базовыми станциями, или альтернативно ей может быть назначена выделенная линия только для ее функционирования. В предшествующем сценарии фемто-базовая станция может создавать ненужные сильные помехи для окружающих макро-базовых станций. Поэтому необходимо, чтобы мощность передачи фемто-базовой станции нужным образом регулировалась и управлялась.
В старых спецификациях UTRAN определены три класса базовых станций, а именно BS широкой зоны, которая обслуживает размещение макро-сот, BS среднего уровня, которая обслуживает размещение микро-сот, и BS местной зоны, которая обслуживает размещение пико-сот, т.е. меньших сот.
В спецификациях E-UTRAN определены два класса базовых станций, а именно BS широкой зоны, которая обслуживает размещение макро-сот, и BS местной зоны, которая обслуживает размещение пико-сот. Для E-UTRAN BS широкой зоны также называется BS общего назначения или макро-BS.
В отличие от вышеуказанных классов BS домашние базовые станции создаются для обслуживания даже меньших и более локализованных зон, чем пико-соты. Домашние базовые станции работают в пределах разрешенного частотного диапазона и на сегодняшний день находятся в процессе стандартизации в рамках обоих 3GPP и IEEE 802.16.
Следует отметить, что, по существу, термины фемто-базовая станция, домашняя базовая станция, домашний NodeB или домашний eNodeB могут относиться к одному и тому же типу базовой станции. В настоящее время в UTRAN и E-UNTRAN термин домашний NodeB или домашний eNodeB или базовая станция используется чаще всего. Последнее представляет собой более общее понятие и охватывает любой тип домашней базовой станции. Поэтому для простоты и последовательности в дальнейшем в данном документе мы будем использовать терминологию домашняя базовая станция (HBS).
В обоих WCDMA и E-UTRAN FDD и TDD максимальная выходная мощность HBS (Pmax_HBS) ограничивается 20 дБм для случая без множественного входа - множественного выхода (MIMO), 17 дБм для каждой антенны в случае двух передающих антенн или 14 дБм для каждого порта антенны в случае четырех передающих антенн. Как правило, это обобщается как следующее:
Pmax_HBS=20dBm-10*log10(N),
где N представляет собой число портов передающей антенны на домашней базовой станции.
Максимальная выходная мощность (Pmax_HBS) состоит из мощности всех переданных нисходящих каналов, включая общие каналы, такие как общие пилотные или опорные сигналы, сигнал синхронизации, каналы управления, такие как каналы диспетчеризации, и канал данных, такой как совместно используемый канал и т.д.
Одно основное отличие по сравнению с другими классами базовых станций состоит в том, что HBS принадлежит частному абоненту, который имеет право установить ее в любом месте. Следовательно, точное планирование сети невозможно в случае размещения HBS. Это отличается от других классов базовых станций, которые размещаются оператором в соответствии с некоторыми вполне определенными принципами. Недостаточность точного сетевого планирования HBS может вызвать помехи для других базовых станций, напримермакро BS. Вследствие потенциального риска помех максимальная выходная мощность HBS должна регулироваться и управляться для того, чтобы минимизировать воздействие на другие базовые станции.
HBS включает в себя обычные функции базовой станции, такие как приемопередатчик, который осуществляет связь туда и обратно между многочисленным оборудованием пользователя (UE). Дополнительно он может включать в себя устройство измерения (MU), оборудованное приемником для того, чтобы производить измерения. Это MU является аналогичным обычной схеме приемника UE, используемой для того, чтобы производить измерения в нисходящем канале, такие как мощность сигнала и качество сигнала соседних сот (и обслуживаемой соты, в которой расположено UE в случае, если UE выполняет измерения). Результаты измерений затем могут быть использованы для регулирования уровня максимальной выходящей мощности. Требования к выполнению измерений, сделанных MU в домашней базовой станции, аналогичны, но не идентичны измерениям UE.
Для того чтобы отличить радиоизмерения домашней BS от измерений GPS (т.е. когда GPS интегрирован в HBS), радиоизмерения HBS иногда называются сотовые радиоизмерения (CRM).
Как указано выше, HBS может действовать на том же частотном канале, что и окружающие макро BS. В этом сценарии, возможно, должна быть размещена смешанная линия для того, чтобы предложить зону обслуживания HBS. Сценарий со смешанной линией, очевидно, представляет собой более перспективный вариант в показателях межканальных помех, между:
-домашними базовыми станциями,
-между домашней базовой станцией и не домашними BS, например, макро BS.
Ситуация с помехами становится еще хуже в сценарии размещения UTRAN TDD и LTE TDD HBS. Это проистекает из того факта, что любое различие в конфигурации восходящего или нисходящего слота или подкадра в HBS и не-HBS или в пределах различных HBS приводит к сильной межслотовой (или межподкадровой) помехе. Даже если используются одни и те же конфигурации TDD подкадра во всех узлах сети беспроводной сети связи, то из-за неточной синхронизации подкадров из-за реальных ограничений будет происходить потеря сигнала из-за помех.
В другом сценарии, в котором HBS работает на частотном канале, смежном по отношению к таковому окружающих макро BS (принадлежащих оператору, который размещает домашнюю BS), этот сценарий менее неблагоприятный в показателях помех между HBS и макро BS. Однако все равно будет иметься влияние помех смежного канала, например, из-за внеполосных излучений.
Как указано выше, HBS включает в себя MU, оборудованное приемником для проведения измерений по сигналам, передаваемым другими базовыми станциями, например не HBS или другими HBS. Это означает, что HBS может проводить аналогичные измерения, которые сделаны реальным UE. Эти измерения будут использованы HBS для того, чтобы провести адаптивное управление мощностью, т.е. установки параметров максимальной выходной мощности.
Такие измерения, например, могут являться такими же, как и для широкополосного множественного доступа с кодовым разделением (WCDMA), в котором три основные величины используются для решений мобильности и которые могут быть использованы для адаптивного управления мощностью, а именно (1) Принимаемая Мощность Кода Сигнала (RSCP) Общего Пилот-Канала (CPICH), (2) энергия CPICH для каждого отношения чипа к шуму (Ec/No) и (3) Индикатор Мощности Принимаемого Сигнала (RSSI) линии UTRA. Обычно RSCP измеряется UE на основании сотового уровня на CPICH. RSSI линии UTRA (полная принимаемая мощность и шум от всех сот, включая обслуживающие соты) измеряется по всей линии. CPICH Ec/No является идентичным CPICH RSCP/RSSI.
В случае E-UTRAN следующие радиоизмерения нисходящего канала определяются в первую очередь для целей мобильности, но могут быть использованы для адаптивного управления мощностью, а именно Мощность принимаемого опорного сигнала (RSRP) и качество принимаемого опорного сигнала (RSRQ), где RSRQ является равным RSRP/RSSI линии. RSRP или часть RSRP в RSRQ в E-UTRAN измеряется исключительно UE на основании сотового уровня на опорных обозначениях. Не существует специального измерения RSSI линии, точнее это является частью определения RSRQ.
В системах GSM следующее измерение определяется для цели мобильного доступа и может быть дополнительно использовано для адаптивного управления мощностью, а именно RSSI линии GSM.
В случае системы cdma2000 1x RTT следующее измерение используется для цели мобильного доступа и может быть дополнительно использовано для адаптивного управления мощностью, а именно пилотная мощность CDMA2000 1x RTT.
В случае системы cdma2000 HRPD следующее измерение определяется для цели мобильного доступа и может быть в дальнейшем использовано для адаптивного управления мощностью, а именно пилотная мощность CDMA2000 1x HRPD.
Указанные измерения, обычно измерения на соседних сотах, как правило, усредняются по большим периодам времени порядка 200 мкс и даже более длительным для того, чтобы отфильтровать, например, эффект быстрого затухания. Также на UE имеется существующее требование измерить и сообщить измерения на соседних сотах (например, RSRP и RSRQ в E-UTRAN) от определенного минимального числа сот. Например, в обоих WCDMA и E-UTRAN минимальное число сот представляет собой 8 сот, состоящих из одной обслуживающей и семи соседних сот, на обслуживающей несущей частоте или обычно называемой внутренней частоте.
В HBS аналогичные измерения для адаптивного управления мощностью могут быть выражены в общих терминах как:
мощность сигнала, измеренная на пилотном или опорном сигнале (SS), что является аналогичным измерениям UE, таким как CPICH RSPR в WCDMA или RSRP в E-UTRAN;
потеря в полосе пропускания (PL), которая аналогична измерению UE потери в полосе пропускания в WCDMA. Иногда вместо этого используется усиление в полосе пропускания (PG), что просто является противоположностью PL;
мощность сигнала, измеренная на пилотном или опорном сигнале, т.е. Качество Сигнала (SQ), которая аналогична измерениям UE, таким как CPICH Ec/No в WCDMA или RSRQ в E-UTRAN; или
принимаемая помеха (Io), которая аналогична измерениям UE, таким как RSSI линии в WCDMA.
Таким образом, максимальная выходная мощность HBS может регулироваться и управляться, основываясь на вышеуказанных измерениях для того, чтобы минимизировать воздействие на другие сотовые приложения, например макро сети/BS. Обычно максимальная выходная мощность будет установлена в интервалы времени порядка нескольких секунд или даже дольше. В зависимости от технологии доступа HBS одно или более радиоизмерений HBS, специфических для данной технологии доступа, могут быть использованы HBS для того, чтобы установить максимальную выходную мощность и ее уровень мощности передачи в целом. Необходимо, чтобы эти измерения были скомбинированы и произведены адекватным образом для того, чтобы быть уверенным в том, что установленная мощность ведет к снижению помехи на не-HBS. В то же время HBS должна иметь возможность работать на относительно более высокой выходной мощности, когда помеха вовне является ограниченной, таким образом, чтобы ресурсы HBS использовались полностью.
Для адаптивного управления мощностью, на основе измерений макро BS/UE, системы современного уровня развития обычно используют одно или более измерений для адаптирования максимальной выходной мощности. Однако все измерения не имеют одинаковые степени точности. Некоторые решения используют только измерения качества сигнала для адаптирования выходной мощности. Измерения качества сигнала, которые аналогичны измерениям UE по CPICH Ec/No в UTRA или RSRQ в E-UTRA, могут обеспечить лучшую точность. Однако измерения качества сигнала не полностью учитывают и отображают весь спектр помех на линии. Во-вторых, эти существующие решения не позволяют адаптивному устройству мощности HBS однозначно определять близость макро сети.
Другой известный способ для регулирования или управления максимальной выходной мощности представляет собой интеллектуальный способ управления мощностью, который основывается на измерениях спутниковой системы, т.е. способы на основе спутника. Глобальная навигационная спутниковая система (GNSS) представляет собой стандартный общий термин для спутниковых навигационных систем, которые дают возможность UE определять их местоположение и получать другую существенную навигационную информацию. Другой общий термин, используемый в настоящее время для определения местоположения на основе спутника, представляет собой Galileo и Дополнительная навигационная спутниковая система (GANSS). Среди прочих, Глобальная система определения местоположения (GPS) представляет собой наиболее известный пример GNSS и в настоящее время находится в эксплуатации более десяти лет. Для простоты мы ниже будем описывать GPS, однако принципы этого раскрытия одинаково применяются к любому типу навигационной спутниковой системы.
GPS состоит из группировки от 24 до 32 средних орбитальных спутников Земли, вращающихся вокруг Земли. Спутники передают пилотные сигналы и другую широковещательную информацию, которые принимаются и обрабатываются приемниками GPS для определения географических положений. Сигналы от определенного количества спутников, например 5 или более, должны быть получены для того, чтобы приемник GPS точно определил географическое положение UE.
Вспомогательная GPS, обычно сокращенно называемая как A-GPS, представляет собой систему, которая может исправить изначальное действие системы определения местоположения на основе спутников GPS. Она широко используется с сотовыми телефонами, способными работать с GPS, используя преимущество способности сотовой сети связи предоставлять точное время, орбитальные данные или календарь для спутников GPS и т.д., давая возможность приемнику GPS более быстро привязываться к спутникам. Среди различных способов определения местоположения A-GPS считается одной из наиболее жизнеспособных и широко используемых.
HBS может, например, включать в себя приемник A-GPS или просто приемник GPS или поддерживать другой возможный способ/систему определения местоположения. Несмотря на это в прежних сетях, т.е. сетях, включающих не-HBS, поддерживающих услуги GPS, не-HBS могут также включать в себя приемник GPS. Приемники GPS обычно используются для того, чтобы предоставлять UE некоторую базовую информацию, относящуюся к GPS, например, обнаруживаемые спутники, координаты базовой станции GPS и т.д. Эта информация, относящаяся к GPS, помогает UE в определении положения GPS относительно быстро, особенно после холодной загрузки, например начального доступа к сети или выхода из тоннеля.
Для того чтобы получить сигнал GPS с относительно хорошим качеством, требуется, чтобы приемник GPS имел радиолинию прямой видимости (LoS) со спутниками GPS. Однако когда приемник GPS расположен внутри здания, LoS соединение между приемником GPS и спутниками GPS может являться невозможным. Вследствие этого слабый сигнал GPS может быть не получен. Один подход для того, чтобы обслужить пользователей GPS, находящихся внутри помещения, заключается в том, чтобы развернуть использование ретрансляторов GPS. Простой ретранслятор GPS просто получает сигнал GPS через наружную антенну, размещенную на верху здания, и затем усиливает и ретранслирует принятый сигнал GPS внутри здания. Обычно ретрансляторы GPS должны иметь только те зоны обслуживания, где сигналы GPS недоступны или слишком слабы для того, чтобы избежать смешения с настоящими сигналами GPS. Ретрансляторы GPS размещаются в тоннелях, больших зданиях и т.д. Особенно в случае большого здания HBS могут также быть использованы для обеспечения внутренней зоны обслуживания для UE. Однако могут иметь место зоны перекрытия, где принимаются оба сигналы GPS и ретранслированные сигналы GPS.
Два типа информации могут быть использованы от ретранслятора GPS, а именно количество обнаруженных спутников (Ns) и качество приема (Qr) обнаруженных спутников. В обычной окружающей среде, по меньшей мере, 4-5 спутников должны быть видимыми с достаточным качеством для того, чтобы получить хорошую точность географического местоположения. Помимо всего прочего, качество приема может быть агрегированной величиной всех обнаруженных спутников, например средневзвешенное значение всех обнаруженных спутников или определенное количество мощнейших спутников. В данном документе мы будем ссылаться на Ns и/или Qr как на метрику или критерий производительности обнаружения GPS.
В зависимости от производительности обнаружения GPS максимальная выходная мощность HBS может быть установлена для различных отображающих функций. Любые подходящие отображающие функции, такие как взвешенная сумма или среднее значение обнаруженных спутников (Ns) или их качества приема (Qr) или обоих, могут быть использованы для того, чтобы создать справочные таблицы с множеством уровней максимальной выходной мощности для HBS.
Отображающая функция, которая ставит в соответствие производительность обнаружения GPS к максимальной выходной мощности для HBS (Pmax_HBS), может использовать или Ns, или Qr, или их комбинации, как выражено в (1), (2) и (3):
F(α1Ns)→Pmax_HBS (1)
F(α2QR)→Pmax_HBS (2)
F(α1Ns,α2QR)→Pmax_HBS (3),
где α1 и α2 представляют собой взвешенные коэффициенты. Может быть использована любая подходящая отображающая функция, такая как взвешенная сумма или среднее значение.
Вышеуказанные отображающие функции используются для того, чтобы создать справочные таблицы для того, чтобы генерировать максимальную выходную мощность на основании NS или QR или их комбинаций.
Слабая производительность обнаружения GPS соответствует сценарию, в котором HBS является изолированной и скрытой от внешних/других базовых станций. Это означает, что меньшая помеха генерируется HBS, например, для наружной макро BS. Вследствие этого более высокая максимальная выходная мощность может быть использована для того, чтобы улучшить зону обслуживания и эффективность HBS внутри помещения. С другой стороны, хорошая производительность обнаружения GPS означает, что расположение HBS может вызвать значительную помеху для наружной сети и, поэтому, более низкая максимальная выходная мощность должна быть использована в домашней базовой станции для того, чтобы защитить макро UE.
Вышеуказанный интеллектуальный способ управления выходной мощностью, основанный на измерениях GPS, т.е. производительности обнаружения, может исключать некоторые проблемы, которые могут возрастать при адаптивном управлении мощностью. Однако интеллектуальный способ управления выходной мощностью не будет работать в сценарии, в котором ретрансляторы GPS размещены внутри помещения. Это происходит потому, что в таких сценариях сильные ретранслированные сигналы GPS принимаются всегда вне зависимости от того, где расположены HBS внутри помещения. Поэтому практически невозможно решить, является ли HBS изолированной и соответственно регулировать максимальную выходную мощность.
Таким образом, оба адаптивное управление мощностью, основанное на измерениях BS/UE, и интеллектуальный способ управления выходной мощностью, основанный на измерениях GPS, с одной стороны, не имеют возможности полностью защитить макро сеть, поскольку HBS, возможно, функционируют с более высокой выходной мощностью, чем требуется. С другой стороны, максимальная выходная мощность может быть установлена неизменной, обуславливая недостаточную зону обслуживания и потерю эффективности HBS.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Таким образом, задачей является создание способа управления максимальной выходной мощностью, который дает уверенность, что может быть достигнут хороший баланс между защитой макро сетей/BS и эффективностью систем HBS.
В примерных вариантах осуществления задача решается при помощи способа в узле сети для управления максимальной выходной мощностью узла сети в беспроводной сети связи, в которой узел сети включает в себя приемник Глобальной навигационной спутниковой системы, приемник GNSS. Приемник GNSS используется для приема сигналов от GNSS. Способ включает в себя определение того, считается ли измеренный сигнал GNSS, переданный от GNSS, обнаруживаемым и, если это так, то определение того, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS. Способ дополнительно включает в себя выбор способа управления мощностью для управления максимальной выходной мощностью узла сети на основе результата определения.
В примерных вариантах осуществления создан узел сети для управления максимальной выходной мощностью в беспроводной сети связи, в которой узел сети сконфигурирован для того, чтобы принимать сигналы от Глобальной навигационной спутниковой сети, GNSS, при помощи приемника GNSS. Дополнительно узел сети включает в себя схему обработки и управления сигналом, сконфигурированную для того, чтобы определять, является ли измеренный сигнал GNSS обнаруживаемым и, если это так, то определять, является ли принятый сигнал GNSS принятым непосредственно от GNSS или через посредство ретранслятора GNSS. Узел сети также включает в себя схему управления мощностью, сконфигурированную для того, чтобы выбирать способ управления мощностью для управления максимальной выходной мощностью узла сети. Выбор способа управления мощностью основывается на результате определения.
Преимущество, полученное, по меньшей мере, по одному из вышеуказанных вариантов осуществления, представляет собой возможность провести различие между сигналом GNSS и ретранслированным сигналом GNSS.
Другое преимущество представляет собой то, что максимальная выходная мощность может быть выбрана, предоставляя относительно хорошую зону обслуживания и эффективность без значительной помехи для окружающих узлов в беспроводной сети связи.
Другие задачи, преимущества и новые признаки аспектов настоящего раскрытия изобретения станут очевидными из дальнейшего описания вариантов осуществления и аспектов.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления описаны более детально со ссылкой на приложенные чертежи, иллюстрирующие примерные варианты осуществления, в которых:
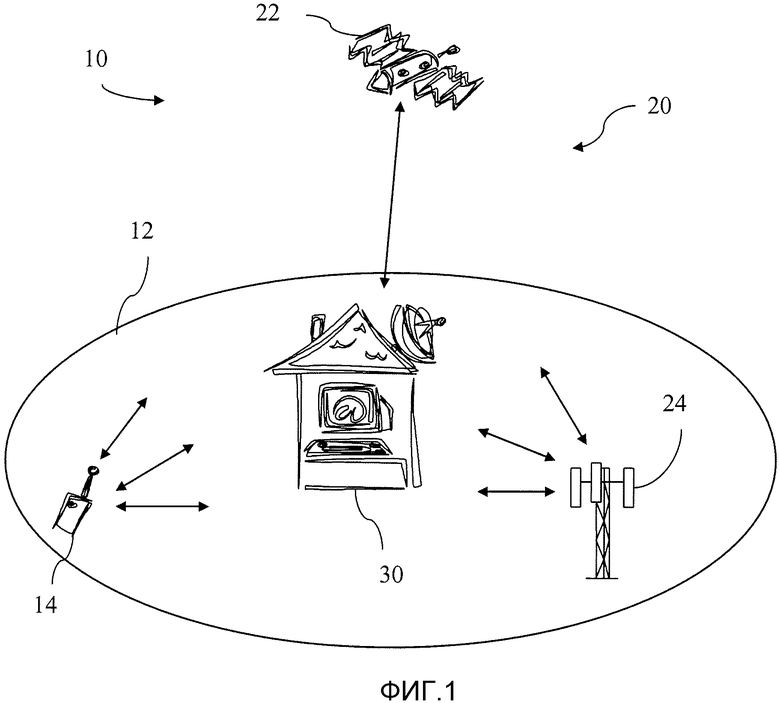
Фиг. 1 представляет собой схематичный обзор, иллюстрирующий вариант осуществления беспроводной сети связи.
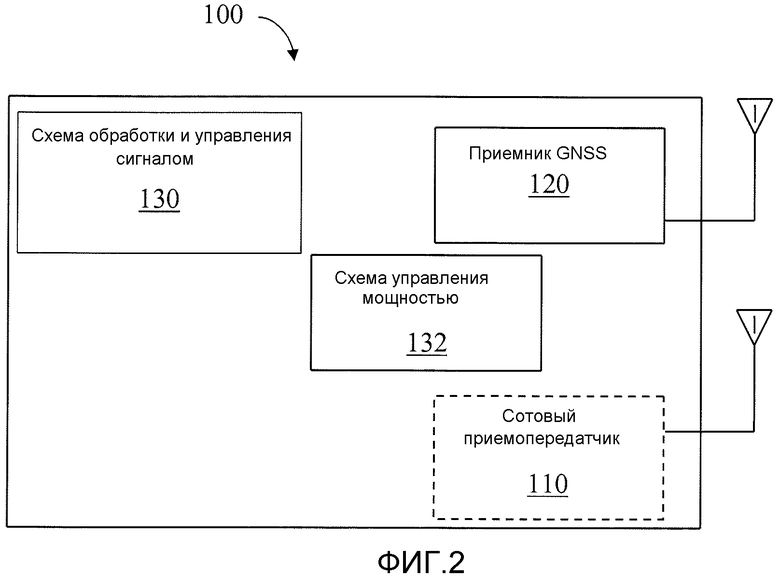
Фиг. 2 представляет собой схематичную блок-схему, иллюстрирующую примерный вариант осуществления узла сети.
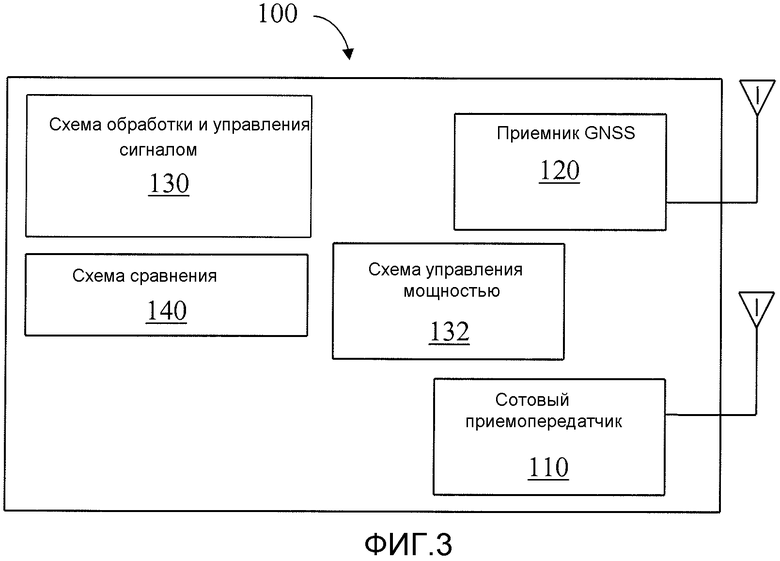
Фиг. 3 представляет собой схематичную блок-схему, иллюстрирующую дальнейшие варианты осуществления узла сети.
Фиг. 4 представляет собой блок-схему, отображающую примерный вариант осуществления способа в узле сети.
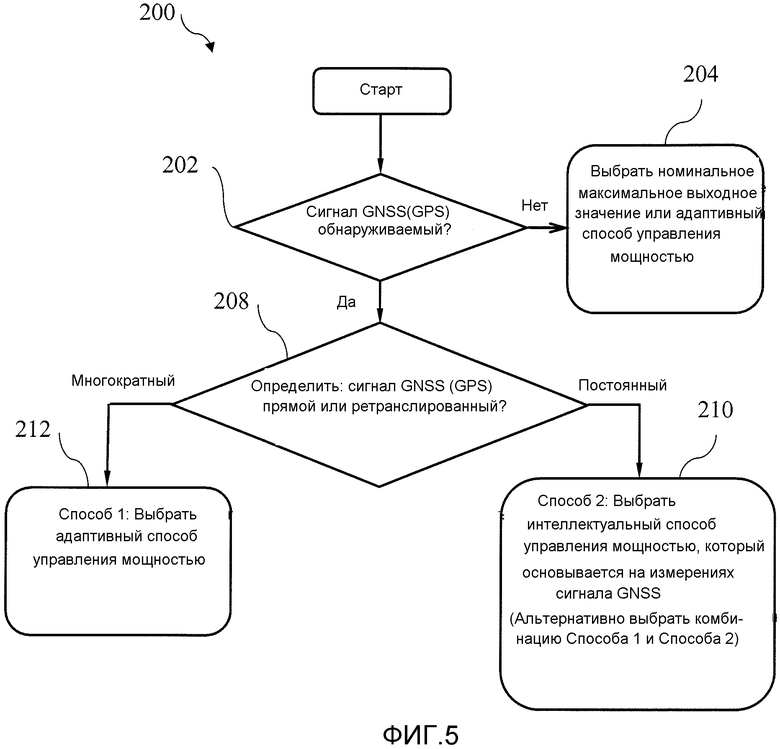
Фиг. 5 представляет собой блок-схему, отображающую еще дальнейшие варианты осуществления способа в узле сети.
ПОДРОБНОЕ ОПИСАНИЕ
В настоящее время в UTRAN и E-UTRAN термины домашний NodeB (домашний NB), или домашний eNodeB (домашний eNodeB), или домашняя базовая станция используются более часто. Последний является более общим, и он охватывает любой тип домашней базовой станции. Термин Домашняя базовая станция (HBS) и домашний Node B взаимозаменяемо использованы в оставшейся части раскрытия изобретения. Эти термины также охватывают фемто-базовую станцию (фемто-BS), домашний eNB или аналогичный тип базовой станции.
Также следует отметить, что термин HBS может относиться к любому типу BS, который допускает обслуживание локализованного радиопространства, например зал заседаний, офис, дом, торговый комплекс внутри помещения и т.д. Например, пико-базовая станция или релейный узел, обслуживающий местную зону, также может рассматриваться в качестве домашней BS. Аналогичным образом макро BS относится к любому типу BS, который допускает обслуживание открытого радиопространства, например наружные зоны, центр городов и т.д. Например, микро-базовая станция или наружный релейный узел, обслуживающий открытое пространство, также может рассматриваться в качестве макро BS в соответствии с вышеуказанными вариантами осуществления.
Касательно чертежей, Фиг.1 иллюстрирует беспроводную сеть связи 10, включающую в себя домашнюю базовую станцию 30, т.е. узел сети, обеспечивающую радиозону обслуживания в местной зоне 12, т.е. обслуживаемой соте, для оконечного оборудования пользователя 14, т.е. Оборудования пользователя (UE), и Глобальную навигационную спутниковую систему (GNSS) 20. Беспроводная сеть связи, т.е. система связи, может включать в себя, например, систему WCDMA, LTE, WIMAX или другую аналогичную систему связи и соответствующие макро-базовые станции (макро-BS), которые не показаны на чертеже. Следует отметить, что обслуживаемая сота 12 представляет собой соту, обслуживаемую HBS 30, и/или соту, обслуживаемую макро BS, не показанной на чертеже, или сотовое перекрытие в зоне обслуживания между макро BS и HBS 30.
В продолжение вышеуказанного, GNSS 20, такая как система GPS, включает в себя множество навигационных спутников 22 и ретрансляторов GNSS 24, т.е. ретрансляционных станций, которые ретранслировали сигнал GNSS. Ретранслятор GNSS 24 (ретранслятор сигнала) принимает сигнал GNSS, усиливает принятый сигнал GNSS и повторно пересылает усиленный сигнал. Поэтому ретранслятор GNSS обычно оборудован схемами приемника и передатчика. Для простоты только один из каждых из них показаны на фиг. 1. В зависимости от сценария размещения, HBS 30 может принимать сигналы GNS, сигналы определения местоположения, непосредственно от GNSS 22 или от ретранслятора GNSS 24.
Фиг.2 иллюстрирует примерный узел сети, т.е. HBS 30. Узел 100 сети включает в себя приемник GNSS 120, схему обработки и управления сигналом 130 и схему управления мощностью 132. Обычно узел 100 сети включает в себя сотовый приемопередатчик 110, или приемник и передатчик, для связи с оконечными оборудованиями пользователя 14, который может работать в соответствии с известными стандартами, такими как WCDMA, LTE и WIMAX.
Приемник GNSS 120 сконфигурирован для того, чтобы принимать сигналы GNSS (сигналы определения местоположения) или от навигационного спутника 22, или через посредство ретранслятора 24, или от обоих. Приемник GNSS 120 может обнаружить, существуют ли какие-либо сигналы GNSS. Приемник GNSS может также обнаружить отсутствие сигнала GNSS. Другой метод управления максимальной выходной мощностью узла 100 сети может быть выполнен в зависимости от того, является ли сигнал GNSS обнаруживаемым или нет. Принятый сигнал GNSS может считаться обнаруживаемым, если уровень сигнала находится выше предварительно определенного порогового значения. Если принятый сигнал GNSS находится ниже порогового значения, то сигнал GNSS может считаться не обнаруживаемым. Следует отметить, что это также охватывает случай, когда сигнала GNSS для приема вовсе не существует. Предварительно определенное пороговое значение может быть предварительно запомнено в узле 100 сети или получено от других узлов сети, таких как MME, HLR/HSS или MakpoBS.
В примере варианта осуществления схема управления мощностью 132 в случае, если принятый сигнал GNSS находится ниже предварительно определенного порога, сконфигурирована для того, чтобы выбирать между номинальным максимальным выходным значением и адаптивным способом управления мощностью, который основывается на измерениях макро-базовой станции и/или измерениях оборудования пользователя. Измерения макро-базовой станции выполняются или запрашиваются схемой обработки и управления сигналом 130 или устройством измерения в узле 100 сети, не показанном на Фиг.2 или Фиг.3. Измерения макро-базовой станции выполняются или запрашиваются, например, HBS, по сигналам, переданным макро-базовой станцией (станциями). Примеры измерений макро-базовой станции могут содержать полный принятый интерфейс, RSSI линии, CPICH RSPCP, CPICH Ec/No и т.д. Измерения UE выполняются UE, обслуживаемым узлом 100 сети, например HBS, по сигналам, переданным другими базовыми станциями, включая макро-базовые станции. Примеры измерений UE могут содержать RSSI линии, CPICH RSPCP, CPICH Ec/No и т.д. Например, две или более величины макро и/или UE измерений могут быть взвешены с некоторыми предварительно определенными значениями или коэффициентами, и агрегированная сумма может являться поставленной в соответствие уровню максимальной выходной мощности. Соответствие может быть основано на предварительно определенной справочной таблице, ставящей в соответствие агрегированные значения измерений уровням максимальной выходной мощности.
В примере варианта осуществления схема обработки и управления сигналом 130 определяет, является ли сигнал GNSS обнаруживаемым или нет, и затем является ли сигнал GNSS достаточно сильным или нет. Схема обработки и управления сигналом 130 может также обрабатывать сигналы, также переданные или принятые сотовым приемопередатчиком 110.
В первом примере вариантов осуществления схема обработки и управления сигналом 130 может быть сконфигурирована для того, чтобы определять, является ли принятый сигнал GNSS принятым непосредственно от GNSS или через посредство ретранслятор GNSS, путем сравнения принятого сигнала GNSS с опорным временем GNSS для того, чтобы определить, имеется ли время задержки.
Например, когда исходный сигнал GNSS повторно передается ретранслятором GNSS, повторно переданный (ретранслированный) сигнал GNSS испытывает определенное время задержки в зависимости от потребностей ретранслятора GNSS, определенных в соответствующей спецификации ретранслятора, т.е. задержку по сравнению с принятым исходным сигналом GNSS. Стандартное значение времени задержки находится на уровне нескольких микросекунд, например 5-10 мкс. Поскольку все сигналы GNSS от различных спутников GNSS испытывают одинаковое время задержки, то как отыскиваемое положение, так и информация о времени от приемника GNSS на узле 100 сети, например HBS30, являются относительно более неточными по сравнению с сигналом(ами) GNSS, принятым только от спутника(ов) GNSS.
Замысел этого способа состоит в том, чтобы получить опорное время GNSS от надежного источника и затем сравнить это полученное время со временем, полученным/принятым от приемника GNSS. В том случае, если разница между опорным временем GNSS и временем, принятым от приемника GNSS, больше чем пороговое значение времени, то может быть определено, что полученный сигнал GNSS повторно передан ретранслятором GNSS. В противном случае принятый сигнал GNSS представляет собой исходный сигнал GNSS. Пороговое значение может быть предварительно определенной величиной или конфигурируемой величиной, которая может быть получена от другого узла сети таким образом, как через посредство транзитного соединение или зависящего от специального средства реализации, т.е. реализации узла сети или HBS.
Существует несколько возможностей для того, чтобы получить опорное время GNSS, некоторые применяемые на практике примеры указаны здесь:
- Узел 100 сети (или HBS 30) может получить опорное время GNSS от UE, т.е. путем отсылки запросов одному или более UE в обслуживаемой соте.
- Протокол точного времени (PTP), который представляет собой стандартный протокол и который может быть использован для того, чтобы синхронизировать часы различных оконечных устройств по сети на скоростях более быстрых, чем одна микросекунда. PTP может обеспечить точную синхронизацию часов для узлов сети (или HBS) без использования GNSS. Вследствие этого узел сети может получить точное опорное время GNSS путем синхронизации с другим источником, таким как другой узел сети, который имеет правильное время GNSS, используя PTP.
- Изначально сконфигурированное время GNSS для всех спутников в узле 100 сети при производстве узла сети.
Во втором примере вариантов осуществления схема обработки и управления сигналом 130 может быть сконфигурирована для того, чтобы определять, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS путем получения информации относительно зон обслуживания ретрансляторов GNSS или расположений ретрансляторов GNSS через посредство транзитного сетевого соединения. Хотя ретранслятор GNSS полезен в предоставлении услуг GNSS пользователям внутри помещений, т.е. UE, он также может вызвать помехи для других ретрансляторов GNSS, которые получают данные от обоих - спутников GNSS и ретрансляторов GNSS в перекрывающихся зонах. Поэтому жесткие нормативы на ретрансляторы GNSS уже применяются во многих странах, таких как Объединенное Королевство и EU. Для операторов сети является удобным получить доступ к информации, касающейся зон обслуживания для ретрансляторов GNSS, как в известных документах. Вследствие этого оператор может конфигурировать эту информацию в опорной сети или в любом другом узле сети, например узле эксплуатации и управления. Домашняя базовая станция может получить информацию о зонах обслуживания, где размещены ретрансляторы GNSS, через посредство транзитной связи с опорной сетью или с соответствующим узлом сети, содержащим эту информацию. В таком случае, после приема сигнала GNSS узел 100 сети связывается с другим узлом сети, т.е. центральным узлом сети или мобильным узлом опорной сети, например, через посредство транзитного соединения/сети и получает информацию, касающуюся зон обслуживания ретрансляторов GNSS. Затем узел 100 сети решает, является ли принятый сигнал GNSS сигналом от ретранслятора GNSS или нет, основываясь на полученной информации о зонах обслуживания ретрансляторов GNSS. Этот подход требует отправки сигналов и обмен сообщениями между узлом 100 сети и другими узлами сети в беспроводной сети связи, например, через посредство транзитного соединения/сети.
В третьем примере вариантов осуществления схема обработки и управления сигналом 130 может быть сконфигурирована для того, чтобы определять, является ли принятый сигнал GNSS принятым непосредственно от GNSS или через посредство ретранслятора GNSS путем получения пилотного сигнала от ретранслятора GNSS. Например, для более усовершенствованного ретранслятора GNSS может быть передан специальный пилотный или опорный сигнал. Уровень мощности этого специального пилотного или опорного сигнала может быть пропорциональным ретранслированному сигналу GNSS. Если уровень принятого пилотного или опорного сигнала находится выше определенного порога, узлом 100 сети может быть определено то, что принятый сигнал GNSS фактически передан ретранслятором GNSS. Пилотный или опорный сигнал также может приводить в действие идентификатор ретранслятора GNSS.
Однако этот пример требует дополнительной модификации на обоих ретрансляторах GNSS и узлах сети для того, чтобы передавать и обнаруживать специальные пилотные или опорные сигналы соответственно.
В четвертом примере вариантов осуществления схема обработки и управления сигналом 130 может быть сконфигурирована для того, чтобы получать измерения по характеристикам радиосреды в обслуживаемой соте и, сравнивая измерения с характеристиками принятого сигнала GNSS, определять, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS.
В соответствии с этим примером один или более показателей, отображающих характеристики радиосреды или свойства поведения принятого сигнала GNSS и обычной среды узла 100 сети, например, внутри помещений или локализованных зон, используются для того, чтобы определить, является ли принятый сигнал GNSS принятым непосредственно от спутника GNSS или от ретранслятора GNSS. Пример далее проиллюстрирован использованием здесь, например, Превышение Задержки/Распределения Задержки принятого сигнала GNSS, которые представляют собой специальные и высоко значимые показатели, характеризующие радиосреду, т.е. характеристики радио среды. Однако другие значимые показатели, относящиеся к радиосреде, не исключаются заранее и могут быть использованы/определены как характеристики радиосреды.
В зонах обслуживания ретрансляторов GNSS обычно существуют перекрывающиеся зоны, где принимаются оба сигналы непосредственно от спутников GNSS и сигналы от ретранслятора GNSS. Как правило, ретранслированный сигнал GNSS запаздывает на общее время задержки τtotal по сравнению с исходным сигналом GNSS, т.е. сигнала, принятого непосредственно от спутника GNSS, из-за задержек, вызванных кабелем, ретранслятором, как и временем прохождения данных от исходной точки до точки назначения, т.е.
(1)τtotal = τcable + τrepeater +τprop.
Типовая величина общего времени задержки τtotal составляет больше, чем несколько микросекунд. Общее время задержки может быть интерпретировано как максимальная задержка прохождения последней мили, т.е. пока не будет принята последняя важная миля.
В типовом пространстве внутреннего помещения, максимальное превышение времени задержки находится на уровне нескольких сотен наносекунд (нс), и среднеквадратичное (RMS) распределение задержки меньше чем 100 нс. Превышение времени задержки, как правило, определяется как значение RMS. Если оба - сигнал GNSS, и ретранслированный сигнал GNSS, приняты и обнаружены узлом 100 сети, то максимальное превышение времени задержки находится на уровне нескольких микросекунд (мкс). Поэтому максимальное превышение времени задержки и RMS распределение задержки становятся значительно больше, чем обычное значения для пространства внутреннего помещения. Путем сравнения этих двух параметров узел 100 сети может определить, работает ли ретранслятор GNSS вблизи него или нет. Здесь также для сравнения может быть использовано пороговое значение, т.е. максимальное превышение времени задержки или RMS распределение задержки может быть характерным для различных сценариев, например, характеристик радиосреды. Более того, пороговые значения могут быть предварительно определенными значениями, переданными узлу 100 сети используемого транзитного соединения/сети или специального средства реализации узла 100 сети. Например, узел 100 сети может измерять превышение времени задержки и RMS распределение задержки на основании радиосигналов сотовой связи, т.е. не GNSS сигналов или, более определенно, тех сигналов, которые были приняты от базовых станций, таких как макро BS или HBS или UE. Затем узел 100 сети использует принятые сигналы сотовой связи для определения пороговых значений, которые, в свою очередь, используются для сравнения принятых сигналов сотовой связи с теми из принятых сигналов GNSS, которые приняты ретранслятором GNSS 120.
С другой стороны, если максимальное превышение времени задержки и RMS распределение задержки не слишком далеки от тех значений, которые типичны для радиосреды внутреннего помещения, где работают типовые узлы сети (или HBS), или для любой радиосреды, в которой узел сети работает в текущий момент, то все равно очень трудно найти различие между ретранслированным и исходным/ прямым сигналом GNSS. Это происходит потому, что когда исходный сигнал GNSS, т.е. прямой сигнал GNSS, от спутников GNSS является очень слабым для того, чтобы быть обнаруженным, или может считаться обнаруживаемым, будет получено аналогичное максимальное превышение времени задержки и RMS распределение задержки для ретранслированного сигнала GNSS.
Хотя вышеуказанный пример не предоставляет полностью завершенного отдельного решения для того, чтобы найти различие между исходным/прямым сигналом GNSS и ретранслированным сигналом GNSS, он представляет собой простейшим способ в сравнении с другими решениями/способами, вышеописанными ранее в примерах с первого по третий. Это потому, что это решение/способ не требует никакой дополнительной отправки сигналов, обмена информацией или дальнейшей модификации обоих ретранслятора GNSS и узла 100 сети. Поэтому это решение/способ является полезным в том случае, если он скомбинирован с другими решениями/подходами. Например, если узел 100 сети получает информацию, касающуюся зон обслуживания ретранслятора GNSS, через посредство транзитного соединения/сети, такая информация может быть не очень точной, в особенности в перекрывающейся зоне, где исходный сигнал GNSS, т.е. прямой сигнал GNSS, и ретранслированный сигнал GNSS приняты вместе. В сценарии, включающем в себя перекрывающиеся зоны между зонами обслуживания ретранслятора GNSS и спутника GNSS, узел 100 сети, путем анализа максимального превышения времени задержки и/или RMS распределения задержки принятого сигнала GNSS, может запросто решить это, например, путем определения/обнаружения того, что принятый сигнал включает в себя оба исходный сигнал GNSS и ретранслированный сигнал GNSS.
В примере вариантов осуществления схема управления мощностью 132 может быть сконфигурирована для того, чтобы выбирать адаптивный способ управления мощностью, который основывается на измерениях макро BS и/или измерениях оборудования пользователя, когда принятый сигнал GNSS определен как принятый через посредство ретранслятора GNSS. Примеры измерений, которые могут быть использованы для адаптивного управления мощностью, представляют собой один или более из следующих: мощность сигнала, измеренная на пилотном или опорном сигнале (SS); потери в полосе пропускания (PL); мощности сигналов, измеренные на пилотном или опорном сигнале (SQ) или принимаемая помеха (Io).
В примере варианта осуществления схема управления мощностью 132 может являться сконфигурированной для того, чтобы выбирать интеллектуальный способ управления мощностью, который основывается на измерениях сигнала GNSS, когда принятый сигнал GNSS определен как полученный непосредственно от GNSS, например, основываясь на местоположении узла сети, сравненным с местоположением известных ретрансляторов и/или соседних макро BS. К примеру, узел 100 сети, например домашняя базовая станция 30, может получать информацию от оператора сети через посредство транзитной сети, касающуюся зон обслуживания ретрансляторов GNSS. Информация может быть получена и сохранена в справочнике и время от времени обновляться. Интеллектуальный способ управления мощностью дополнительно может основываться на измерениях макро-базовой станции и/или измерениях оборудования пользователя, как указано выше для адаптивного способа управления мощностью. Оба адаптивный и интеллектуальный методы управления мощностью могут быть использованы для того, чтобы управлять максимальной выходной мощностью узла 100 сети, которая, например, HBS 30.
В примере варианта осуществления узел 100 сети может дополнительно включать в себя схему сравнения 140, как проиллюстрировано на Фиг.3, сконфигурированной для того, чтобы сравнивать принятый сигнал GNSS с предварительно определенным пороговым значением, для того, чтобы решить, может ли принятый сигнал GNSS считаться обнаруживаемым или нет.
В примере варианта осуществления схема обработки и управления сигналом 130 может включать в себя схему управления мощностью 132 для управления мощностью передачи узла 100 сети. Схема управления мощностью 132 может выполнять алгоритмы адаптивного управления мощностью, основанные на радиосигналах сотовой связи. Схема управления мощностью 132 может также выполнять алгоритмы адаптивного управления мощностью при помощи GNSS для того, чтобы снизить помеху, т.е. интеллектуальный способ управления мощностью, который основывается на измерениях сигнала GNSS.
Фиг.4 представляет собой блок-схему, отражающую пример вариантов осуществления способа 200, который может быть осуществлен в узле 100 сети, например HBS 30. Способ 200 предлагается для управления максимальной выходной мощностью узла 100 сети, который находится на беспроводной сети связи 10 и в котором узел 100 сети сконфигурирован для того, чтобы включать в себя приемник GNSS 120 для приема сигналов от GNSS. Способ включает в себя определение 202 того, считается ли принятый сигнал GNSS, переданный от GNSS, обнаруживаемым. Это может быть сделано путем определения ретранслятором сигнала GNSS существования сигнала GNSS или существования очень слабого сигнала GNSS. Сигнал GNSS, полученный от GNSS, считается обнаруживаемым, если он превышает предварительно определенный порог. Когда сигнал GNSS находится ниже порога, тогда считается, что сигнал GNSS является не обнаруживаемым. Не принимаемый сигнал GNSS также может считаться одним из принадлежащих к сигналам GNSS, лежащих ниже порога. В соответствии с примером варианта осуществления, когда сигнал GNSS определен таким образом, что считается не обнаруживаемым, то должно быть выбрано номинальное значение максимальной выходной мощности или адаптивный способ управления мощностью 204, как проиллюстрировано на Фиг.5. Следует отметить, что значение номинальной максимальной выходной мощности может быть максимально возможной выходной мощностью, доступной на узле 100 сети, т.е. HBS 30. В примере варианта осуществления адаптивный метод управления мощностью основывается на измерениях макро-базовой станции и/или измерениях оборудования пользователя, например, Мощности сигнала (SS), такой как CPICH RSCP в UTRAN или RSRP в E-UTRAN, Качества сигнала (SQ), такого как CPICH Ec/No в UTRAN или RSRQ в E-UTRAN, Потери в полосе пропускания (PL), Усиления в полосе пропускания (PG), Помеха (Io) или похожие.
Когда сигнал GNSS, принятый от GNSS, определен обнаруживаемым, способ 200 дополнительно включает в себя определение 208 того, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS 24. Принятый сигнал GNSS может быть определен как принятый непосредственно или принятый через посредство ретранслятора GNSS 24 по одной или более из следующих процедур:
-путем сравнения обнаруженного сигнала GNSS с опорным временем GNSS для того, чтобы определить, имеется ли время задержки, в которой опорное время GNSS может быть запрошено в соответствии с одной или более из следующих процедур: посылая запрос оборудованию пользователя, обслуживаемому узлом связи; используя протокол точного времени для синхронизации с другим более надежным узлом сети; или посылая запрос на заранее сконфигурированное время GNSS для одного или более спутников.
-путем получения информации, касающейся зон обслуживания ретрансляторов GNSS или местоположения ретрансляторов GNSS через посредство транзитных соединений сети.
-путем приема пилотного или опорного сигнала от ретранслятора GNSS и определения того, что принятый сигнал GNSS принят через посредство ретранслятора GNSS, когда уровень принятого пилотного или опорного сигнала находится выше предварительно определенного порогового значения. Принятый пилотный или опорный сигнал может дополнительно включать в себя идентификатор ретранслятора GNSS для идентификации того, что ретранслятор GNSS является ретранслятором GNSS.
-путем измерения характеристик радиосреды в обслуживаемой соте и сравнения измеренных характеристик радиосреды с характеристиками обнаруженного сигнала GNSS.
Продолжая описание способа, проиллюстрированного на Фиг.4, способ включает в себя дальнейший этап выбора 209 способа управления мощностью для управления максимальной выходной мощностью узла 100 сети на основе результата определения.
Фиг.5 представляет собой блок-схему, отображающую еще следующие примеры вариантов осуществления указанного выше способа 200. В соответствии с одним примером варианта осуществления способ 200 включает в себя выбор 212 способа адаптивного управления мощностью, который основывается на измерениях макро-базовой станции и/или измерениях оборудования пользователя, когда результат определения показывает, что принятый сигнал GNSS принят через посредство ретранслятора GNSS.В соответствии со следующими примерами вариантов осуществления способ 200 включает в себя выбор 210 интеллектуального способа управления мощностью, который основывается на измерениях сигнала GNSS, альтернативно в комбинации с методом адаптивного управления мощностью, когда результат определения показывает, что принятый сигнал GNSS принят непосредственно от GNSS.
Следует отметить, что любая внутренняя электроника узла 100 сети или HBS 30, не слишком необходимая для понимания настоящих способов и их вариантов осуществления, также как аспектов вариантов осуществления, была исключена из Фиг.1 по Фиг.3 по причинам ясности.
Далее следует отметить, что некоторые из описанных схем 110-140, включенные в состав узла 100 сети, должны рассматриваться как отдельные логические компоненты, а не обязательно как отдельные физические компоненты. Для упоминания только одного примера, схема обработки и управления сигналом 130, приемник GNSS и схема управления мощностью 132 могут быть включены или скомпонованы в пределах одной и той же физической схемы.
Способ 200 в узле 100 сети дополнительно может быть осуществлен за счет использования одной или более схем обработки 110-140 в домашней базовой станции, например HBS 30, или в аналогичной базовой станции малой зоны совместно с машинным программным кодом для выполнения функции настоящего способа. Таким образом, машинный программный продукт, содержащий инструкции для выполнения способа в узле сети, может принимать участие, когда машинный программный продукт загружен или работает в узле 100 сети.
Машинный программный продукт, указанный выше, может быть предоставлен, например, в форме носителя данных, содержащего машинный программный код для выполнения способа в узле 100 сети в случае, если он загружен или работает в узле 100 сети. Носитель данных может представлять собой, например, жесткий диск, диск CD-ROM, стек памяти, оптическое запоминающее устройство, магнитное запоминающее устройство или любой другой подходящий носитель, такой как диск или лента, который может содержать машиночитаемые данные. Более того, машинный программный код может быть предоставлен в виде программного кода на сервере и загружен в узел 100 сети, например, через Интернет или соединение внутренней сети.
Когда используется формулировка «включает в себя» или «включающий в себя», то это должно интерпретироваться как не ограничивающее, т.е. значащее «состоит, по меньшей мере, из». Настоящее изобретение не ограничивается описанными выше предпочтительными вариантами осуществления. Могут быть использованы различные альтернативные варианты, модификации или эквивалентные варианты. Таким образом, вышеуказанные варианты осуществления не должны считаться ограничивающими объем настоящего изобретения, которое определено прилагаемой формулой изобретения.
Изобретение относится к беспроводной связи. Техническим результатом является управление максимальной выходной мощностью узла сети для достижения хорошего баланса между защитой макросетей/BS и эффективностью систем HBS. Узел сети сконфигурирован для того, чтобы включать в себя приемник Глобальной навигационной спутниковой системы, приемник GNSS. Приемник GNSS используется для приема сигналов от GNSS. Способ включает в себя определение того, считается ли измеренный сигнал GNSS, переданный от GNSS, обнаруживаемым, и если это так, определение того, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS. Дополнительно способ включает в себя выбор способа управления мощностью для управления максимальной выходной мощностью узла сети на основе результата определения. 2 н. и 29 з.п. ф-лы, 5 ил.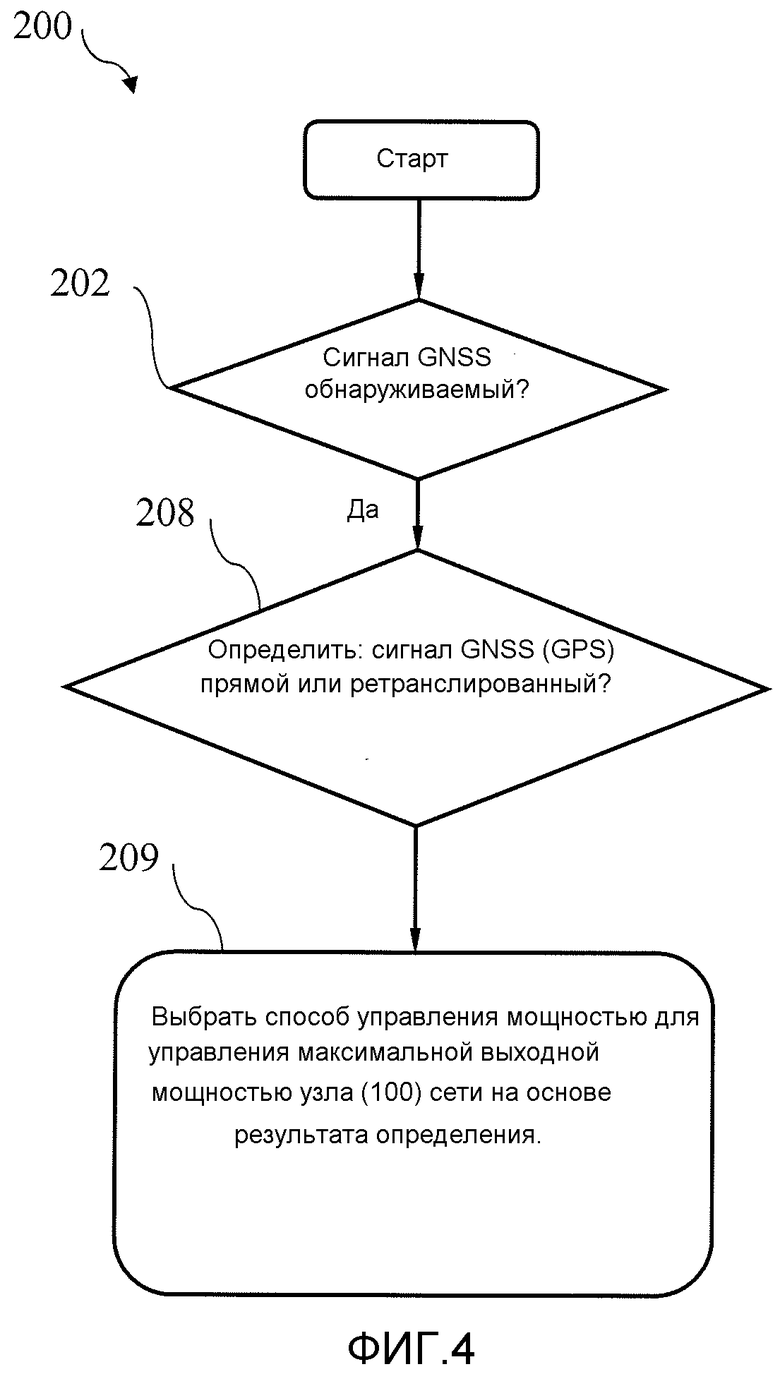
1. Способ (200), в узле (100) сети, для управления максимальной выходной мощностью узла (100) сети, расположенного в беспроводной сети (10) связи, причем узел (100) сети включает в себя приемник (120) Глобальной навигационной спутниковой системы, приемник GNSS, для приема сигналов от GNSS, при этом способ включает в себя:
определение (202), считается ли принятый сигнал GNSS, переданный от GNSS, обнаруживаемым, и если это так:
определение (208), принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS; и
выбор (209) способа управления мощностью для управления максимальной выходной мощностью узла (100) сети на основе результата определения.
2. Способ по п.1, в котором принятый сигнал GNSS считается обнаруживаемым, если он находится выше предварительно определенного порогового значения.
3. Способ по п.2, в котором, в случае если принятый сигнал GNSS находится ниже предварительно определенного порога, выбор производится между номинальным максимальным выходным значением и адаптивным методом управления мощностью, который основывается на измерениях макробазовой станции и/или на измерениях оборудования пользователя.
4. Способ по п.1, в котором выбор способа управления мощностью включает в себя выбор адаптивного способа управления мощностью, который основывается на измерениях макробазовой станции и/или на измерениях оборудования пользователя, когда результат определения показывает, что принятый сигнал GNSS принят через посредство ретранслятора GNSS.
5. Способ по п.1, в котором выбор способа управления мощностью включает в себя выбор интеллектуального способа управления мощностью, который основывается на измерениях сигнала GNSS, когда результат определения показывает, что принятый сигнал GNSS принят непосредственно от GNSS.
6. Способ по п.5, в котором выбор способа управления мощностью включает в себя выбор интеллектуального способа управления мощностью, который дополнительно основывается на измерениях макробазовой станции и/или на измерениях оборудования пользователя.
7. Способ по п.1, в котором определение того, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS, осуществляется путем сравнения обнаруженного сигнала GNSS с опорным временем GNSS для того, чтобы определить, имеется ли время задержки.
8. Способ по п.7, дополнительно включающий в себя запрос опорного времени GNSS при помощи одной или более из следующих процедур: посылки запроса оборудованию пользователя, обслуживаемому узлом сети; использования протокола точного времени для синхронизации с другим более надежным узлом сети; или посылки запроса на заранее сконфигурированное время GNSS для одного или более спутников.
9. Способ по любому из пп.1-8, в котором определение того, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS, осуществляется путем получения информации, касающейся зон обслуживания ретрансляторов GNSS или расположения ретрансляторов GNSS через посредство транзитного соединения сети.
10. Способ по любому из пп.1-8, в котором определение того, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS, осуществляется путем приема пилотного или опорного сигнала от ретранслятора GNSS.
11. Способ по п.10, в котором определение включает в себя определение того, что принятый сигнал GNSS принят через посредство ретранслятора GNSS, когда уровень принятого пилотного или опорного сигнала находится выше предварительно определенного порогового значения.
12. Способ по п.10, в котором принятый пилотный или опорный сигнал дополнительно включает в себя идентификатор ретранслятора GNSS.
13. Способ по любому из пп.1-8, 11, 12, в котором определение того, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS, включает в себя измерение характеристик радиосреды в обслуживаемой соте и сравнение измеренных характеристик радиосреды с характеристиками обнаруженного сигнала GNSS.
14. Способ по п.13, в котором измеренные характеристики радиосреды и характеристики обнаруженного сигнала GNSS используются для того, чтобы рассчитать максимальное превышение задержек и/или среднеквадратичные распределения задержки для того, чтобы использовать при определении.
15. Способ по любому из пп.1-8, 11, 12, 14, в котором GNSS представляет собой Глобальную систему определения местоположения, GPS, и сигнал GNSS представляет собой сигнал GPS.
16. Способ по любому из пп.1-8, 11, 12, 14, в котором узел сети представляет собой одно из: домашней базовой станции; домашнего NodeB; домашнего eNodeB; фемтобазовой станции; пикобазовой станции; или релейного узла.
17. Узел (100) сети для управления максимальной выходной мощностью в беспроводной сети (10) связи, причем упомянутый узел сети сконфигурирован для того, чтобы принимать сигналы от Глобальной навигационной спутниковой системы, GNSS, при помощи приемника (120) GNSS, при этом узел (100) сети дополнительно включает в себя:
схему (130) обработки и управления сигналом, сконфигурированную для того, чтобы определять, считается ли принятый сигнал GNSS обнаруживаемым, и если это так, то определять, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS; и
схему (132) управления мощностью, сконфигурированную для того, чтобы выбирать способ управления мощностью для управления максимальной выходной мощностью узла (100) сети на основе результата определения.
18. Узел (100) сети по п.17, в котором узел (100) сети дополнительно включает в себя схему (140) сравнения, сконфигурированную для того, чтобы сравнивать принятый сигнал GNSS с предварительно определенным пороговым значением для того, чтобы решать, считать ли принятый сигнал GNSS обнаруживаемым или нет.
19. Узел (100) сети по п. 18, в котором схема (132) управления мощностью, в том случае, если принятый сигнал GNSS находится ниже предварительно определенного порога, сконфигурирована для того, чтобы выбирать между номинальным максимальным выходным значением и адаптивным способом управления мощностью, который основывается на измерениях макробазовой станции и/или измерениях оборудования пользователя.
20. Узел (100) сети по п.17, в котором схема (132) управления мощностью сконфигурирована для того, чтобы выбирать адаптивный способ управления мощностью, который основывается на измерениях макробазовой станции и/или на измерениях оборудования пользователя, когда принятый сигнал GNSS определен как принятый через посредство ретранслятора GNSS.
21. Узел (100) сети по п.17, в котором схема (132) управления мощностью сконфигурирована для того, чтобы выбирать интеллектуальный способ управления мощностью, который основывается на измерениях сигнала GNSS, когда принятый сигнал GNSS определен как принятый непосредственно от GNSS.
22. Узел (100) сети по п. 21, в котором схема (132) управления мощностью сконфигурирована для того, чтобы выбирать интеллектуальный способ управления мощностью, который дополнительно основывается на измерениях макробазовой станции и/или на измерениях оборудования пользователя.
23. Узел (100) сети по п.17, в котором схема (130) обработки и управления сигналом сконфигурирована для того, чтобы определять, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS, путем сравнения принятого сигнала GNSS с опорным временем GNSS для того, чтобы определить, имеется ли время задержки.
24. Узел (100) сети по п.23, при этом узел (100) сети сконфигурирован для того, чтобы запрашивать опорное время GNSS при помощи одной или более из следующих процедур: посылки запроса оборудованию пользователя, обслуживаемому узлом сети; использования протокола точного времени для синхронизации с другим более надежным узлом сети; или посылки запроса на заранее сконфигурированное время GNSS для одного или более спутников.
25. Узел (100) сети по любому из пп.17-24, в котором схема (130) обработки и управления сигналом сконфигурирована для того, чтобы определять, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS, путем получения информации, касающейся зон обслуживания ретрансляторов GNSS или местоположений ретрансляторов GNSS через посредство транзитного соединения сети.
26. Узел (100) сети по любому из пп.17-24, в котором схема (130) обработки и управления сигналом сконфигурирована для того, чтобы определять, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS, путем приема пилотного или опорного сигнала от ретранслятора GNSS.
27. Узел (100) сети по п.26, в котором схема (130) обработки и управления сигналом дополнительно сконфигурирована для того, чтобы определять, принят ли принятый сигнал GNSS непосредственно от GNSS или, когда уровень принятого пилотного или опорного сигнала находится выше предварительно определенного порогового значения, через посредство ретранслятора GNSS.
28. Узел (100) сети по п.26, в котором пилотный или опорный сигнал сконфигурирован для того, чтобы включать в себя идентификатор ретранслятора GNSS.
29. Узел (100) сети по любому из пп.17-24, 27, 28, в котором схема (130) обработки и управления сигналом сконфигурирована для того, чтобы получать измерения по характеристикам радиосреды в обслуживаемой соте и, сравнивая измерения с характеристиками принятого сигнала GNSS, определять, принят ли принятый сигнал GNSS непосредственно от GNSS или через посредство ретранслятора GNSS.
30. Узел (100) сети по п.29, в котором полученные измерения характеристик радиосреды и характеристики принятого сигнала GNSS используются для того, чтобы рассчитать максимальное превышение задержек и/или среднеквадратичные распределения задержки для того, используемые при определении.
31. Узел (100) сети по любому из пп.17-24, 27, 28, 30, в котором GNSS представляет собой Глобальную систему определения местоположения, GPS, и сигнал GNSS представляет собой сигнал GPS.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| ПРИЕМНИК СИГНАЛОВ СИСТЕМЫ GPS И СПОСОБ ОБРАБОТКИ СИГНАЛОВ СИСТЕМЫ GPS | 1996 |
|
RU2236692C2 |
| WO 9802009 A1, 15.01.1998 | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

