Изобретение относится к промышленным и сельскохозяйственным тракторам и агрегатам на их базе, в частности к бульдозерам.
Известна машина с микропроцессорным устройством технического диагностирования, содержащим датчики микроперемещений, усилий, линейных и угловых перемещений рулевого колеса, которые через порты ввода подключены к однокристальной микроЭВМ, содержащей постоянное запоминающее устройство [1].
Недостатком этого устройства являются ограниченные функциональные возможности в части технического диагностирование, поскольку в нем осуществляется оценка технического состояния только рулевого управления.
Известен также трактор с регистратором параметров, содержащий остов с установленной на нем моторно-трансмиссионной установкой, ходовую систему, состоящую из колесного или гусеничного движителя и подвески, соединяющей движитель с остовом, кабину с рабочим местом оператора, рабочее оборудование, органы и механизмы управления моторно-трансмиссионной установкой и рабочим оборудованием и систему электрооборудования, в состав которой входят микропроцессорный контроллер с энергонезависимым запоминающим устройством, а также датчики параметров работы тракторного агрегата и панель оператора, подключенные к микропроцессорному контроллеру, который приспособлен для обработки сигналов датчиков параметров работы тракторного агрегата, хранения (регистрации) их величин в энергонезависимой памяти и вывода на индикаторы панели оператора, в том числе частоты вращения вала двигателя, величины буксования, часового и погектарного расхода топлива, часовой производительности, пройденного трактором пути и времени наработки, оставшегося до очередного технического обслуживания [2].
В этом тракторе датчики параметров его работы и микропроцессорный контроллер с энергонезависимым запоминающим устройством образуют регистратор параметров, под которым подразумевается устройство, осуществляющее регистрацию (контроль, измерение) параметров работы трактора, их первичную обработку (на тракторе), а также накопление и хранение полученной информации в течение установленного времени.
Недостатком этого технического решения являются ограниченные функциональные возможности в части регистрации параметров работы трактора, поскольку в нем при обработке параметров работы трактора не реализовано выявление его неисправностей. Это, в свою очередь, приводит к пониженной надежности работы трактора ввиду невозможности своевременного выполнения работ по техническому обслуживанию и предупреждению возникновения отказов трактора.
Известен также универсальный колесный трактор с навесными, полунавесными и прицепными машинами и орудиями, содержащий полураму с закрепленными на ней двигателем с турбонаддувом и системой смазки турбокомпрессора, механизмы силовой передачи, пневмосистему привода тормозов, кабину с органами управления, щитом контрольно-измерительных приборов и системой отопления и вентиляции, а также систему внутренней диагностики его технического состояния и оповещения оператора, выполненную в виде датчиков минимального давления воздуха пневмосистемы привода тормозов прицепа и минимального давления масла системы смазки турбокомпрессора, электрически связанных с сигнальными лампами на щитке контрольно-измерительных приборов и со звуковым сигналом [3].
Недостатком этого трактора является пониженная надежность его работы, обусловленная малым количеством параметров технической диагностики и, соответственно, возможностью возникновения отказов узлов и агрегатов трактора, обусловленных выходом за установленные пределы тех параметров его работы, которые не входят в число диагностируемых параметров.
Устройством, наиболее близким к предложенному, является машина с регистратором параметров, содержащая двигатель внутреннего сгорания (ДВС), трансмиссию и систему управления на основе контроллера с подключенными к нему датчиками параметров работы машины. Контроллер осуществляет измерение параметров работы машины с использованием соответствующих датчиков, обработку, накопление и хранение информации об этих параметрах в энергонезависимой памяти в реальном масштабе времени, а также выявление на основании этой информации неисправностей машины и последующее формирование и передачу соответствующих информационных и предупреждающих сигналов на панель оператора и на внешний сигнализатор. При этом неисправности машины, обусловленные наличием трещин в радиаторе системы охлаждения ДВС и смешением антифриза и масла в системе смазки, выявляются путем измерения температуры и диэлектрической проницаемости антифриза и смазочного масла [4].
Его недостатком является пониженная надежность, обусловленная малым количеством диагностируемых параметров, отсутствием анализа их изменений во времени, отсутствием прогнозирования возникновения отказов и принятия мер по их предупреждению, а также реализация управления скоростными и нагрузочными режимами работы машины без учета ее технического состояния.
Целью изобретения является создание трактора с регистратором параметров, обладающего повышенной эксплуатационной надежностью, характеризующейся отсутствием непредвиденных недопустимых изменений во времени способности трактора выполнять требуемые функции в заданных режимах и условиях его применения.
В тракторе с регистратором параметров, содержащем остов, моторно-трансмиссионную установку (МТУ), ходовую систему, состоящую из колесного или гусеничного движителя и подвески, кабину с рабочим местом оператора, рабочее оборудование, органы и механизмы управления МТУ и рабочим оборудованием, панель оператора, контроллер, выполненный автономным или встроенным в панель оператора, в состав которого входит энергонезависимое запоминающее устройство, часы реального времени, цифровой вычислитель и устройство ввода/вывода информации, приспособленное для проводной или беспроводной передачи информации на внешнее устройство, а также датчики рабочих и/или диагностических параметров трактора, подключенные к контроллеру, который выполнен с возможностью накопления и хранения в энергонезависимой памяти информации о рабочих и/или диагностических параметрах трактора, обработки этой информации и, в случае выявления их отклонений за верхние и/или нижние предельные значения, последующего формирования и передачи на панель оператора предупреждающих сигналов и/или формирования и передачи на механизмы управления МТУ и/или рабочим оборудованием трактора сигналов остановки их работы, указанный технический результат достигается за счет того, что цифровой вычислитель, в соответствии с программой его работы, предварительно записанной в энергонезависимой памяти, дополнительно реализует, по меньшей мере, одну из следующих функций:
- путем анализа изменений во времени, по меньшей мере, одного рабочего и/или диагностического параметра осуществляет прогноз продолжительности работы трактора, в течение которой величина этого параметра не выйдет за установленное предельно допустимое значение, и далее отображает на панели оператора информацию о времени работы трактора, оставшемся до проведения его технического обслуживания (ТО) или ремонта;
- путем анализа изменений рабочих и/или диагностических параметров трактора и показаний часов реального времени контролирует своевременность проведения ТО трактора, формирует сигнал об отсутствии ТО и записывает его в запоминающее устройство и передает на панель оператора для отображения;
- анализирует текущие значения и изменения во времени рабочих и/или диагностических параметров трактора, в результате этого анализа дает оценку текущего технического состояния трактора и прогноза его изменения, оценивает вероятности наступления отказов и риск возникновения аварийных ситуаций при эксплуатации трактора, после чего на основе этих оценок определяет предельно-допустимый срок эксплуатации трактора (остаточный ресурс), записывает его величину в запоминающее устройство и/или передает на панель оператора для отображения;
- осуществляет изменение предельно допустимой величины какого-либо рабочего и/или диагностического параметра, характеризующего нагрузочные и/или скоростные режимы работы трактора, в зависимости от величины другого параметра, а также формирует и передает на механизмы управления МТУ и/или рабочим оборудованием и на панель оператора сигналы, необходимые для реализации такого автоматизированного или ручного управления трактором, при котором не происходит превышения этой предельно допустимой величины;
- путем анализа изменений рабочих и/или диагностических параметров выявляет нарушения оператором установленных правил эксплуатации трактора, предварительно записанных в энергонезависимую память в виде допустимых сочетаний или функциональных взаимосвязей этих параметров, записывает информацию об этих нарушениях в энергонезависимую память и передает ее для отображения на панель оператора;
- путем анализа изменений рабочих и/или диагностических параметров трактора дает оценку квалификации оператора при управлении трактором по предварительно установленному критерию оценки производительности, экономичности и/или безопасности работы трактора, предварительно записанному в энергонезависимую память в виде функции этих параметров, далее записывает информацию об этой квалификации в энергонезависимую память и/или передает ее на панель оператора;
- путем анализа изменений рабочих и/или диагностических параметров, показаний часов реального времени и предварительно записанной в энергонезависимую память информации о запасных частях и расходных материалах, необходимых для проведения ТО и планово-предупредительных ремонтов, определяет потребность в этих запасных частях и расходных материалах для проведения ближайшего по времени ТО или планово-предупредительного ремонта, записывает информацию об этой потребности в энергонезависимую память, а также передает ее на панель оператора для отображения и/или осуществляет ее передачу на внешнее устройство или пункт технического обслуживания трактора;
- осуществляет запись в энергонезависимую память информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с сокращенным периодом и далее осуществляет стирание части этих записей, что эквивалентно увеличению периода записи, после истечения установленного интервала времени;
- осуществляет запись в энергонезависимую память информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с переменным периодом, величина которого обратно пропорциональна тяговому усилию, скорости движения трактора и/или скорости их изменения;
- осуществляет запись в энергонезависимую память информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с сокращенным периодом в случае отклонения, по меньшей мере, одного их этих параметров за его нижнее или верхнее предельно допустимое значение, и/или в случае формирования оператором команды записи этих параметров с сокращенным периодом с помощью органа управления, размещенного на панели оператора;
- осуществляет запись в энергонезависимую память информации о воздействиях оператора на органы управления МТУ и рабочим оборудованием трактора;
- осуществляет запись в энергонезависимую память информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки независимо от наличия напряжения в бортовой сети трактора за счет использования автономного источника питания контроллера и соответствующих датчиков;
- осуществляет не менее чем двухкратную запись информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки в различные части энергонезависимой памяти контроллера и/или в дополнительно установленное энергонезависимое запоминающее устройство, входящее в состав одного из устройств трактора или подключенное к нему;
- осуществляет запись в энергонезависимую память информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с применением алгоритмов шифрования, обнаружения ошибок, исправления ошибок этой записи и/или с добавлением неизменяемого идентификационного номера трактора, предварительно записанного в части энергонезависимой памяти, недоступной для изменений, в часах реального времени или в дополнительном постоянном запоминающем устройстве, подключенном к контроллеру;
- осуществляет контроль наличия записи и/или отсутствия ошибок в записи информации о рабочих и/или диагностических параметрах трактора и/или результатов их анализа и/или обработки и, в случае отсутствия этой записи, формирует сигнал остановки трактора и передает его на панель оператора и/или на механизмы управления МТУ и/или рабочим оборудованием трактора;
- реализует видеорегистрацию работы трактора с помощью видеокамеры, установленной на тракторе с возможностью обзора зоны работы трактора и/или его рабочего органа;
- определяет неисправные датчики рабочих и/или диагностических параметров трактора с помощью средств самоконтроля, встроенных в эти датчики, и/или путем выявления противоречий в их выходных сигналах, записывает информацию о неисправных датчиках в энергонезависимую память, а также передает ее на панель оператора для отображения и/или формирует сигнал остановки трактора и передает его на механизмы управления МТУ;
- осуществляет выбор, на основании анализа информации о рабочих и/или диагностических параметрах трактора, рекомендаций по оптимальным, по критерию безопасности или производительности работы трактора, действиям оператора по управлению трактором в нормальных и/или аварийных режимах его работы, из числа рекомендуемых действий оператора, предварительно записанных в энергонезависимую память в виде базы данных, а также последующую передачу этих рекомендаций на панель оператора для отображения;
- осуществляет прием и запись в энергонезависимую память качественной и/или количественной информации о работе и/или техническом состоянии трактора, введенной оператором с панели оператора, или ее перезапись с внешнего устройства, в частности информации о рабочих и/или диагностических параметрах трактора за предыдущий период его работы и/или информации, необходимой для изменения программы работы контроллера.
Кроме того, с целью достижения указанного технического результата, в различных вариантах реализации трактора, в частности:
- к нарушениям оператором правил эксплуатации трактора, записанным в энергонезависимой памяти, относится превышение предварительно установленной максимально допустимой величины вертикального, продольного или поперечного ускорения трактора, скорости движения трактора, угловой скорости двигателя внутреннего сгорания (ДВС), угла уклона трассы движения и/или длительности работы с повышенным буксованием движителя;
- в качестве критерия оценки квалификации оператора используется объем выполненных трактором работ в единицу времени, соотношение расхода топлива и выполненного объема работ и/или количество случаев превышения предельно допустимых параметров работы трактора в единицу времени. При проведении этой оценки, в частности, учитывается буксование движителя трактора;
- в тех интервалах времени, в которых осуществляются воздействия оператора на органы управления МТУ и рабочим оборудованием трактора, цифровой вычислитель записывает в энергонезависимую память информацию о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с сокращенным периодом этой записи;
- контроллер, панель оператора, органы управления МТУ и рабочим оборудованием и датчики рабочих и/или диагностических параметров трактора объединены между собой шиной CAN;
- цифровой вычислитель дополнительно осуществляет контроль выполнения оператором отображаемых на панели оператора рекомендаций по управлению трактором в нормальных и/или аварийных режимах и осуществляет запись результатов этого контроля в энергонезависимую память. При невыполнении оператором этих рекомендаций в течение установленного интервала времени контроллер формирует сигнал остановки трактора и передает его на механизмы управления МТУ;
- внешнее устройство, использующееся для обмена информацией с контроллером, выполнено в виде флеш-накопителя USB, карты SD или персонального компьютера, оснащенного средством для обмена данными с контроллером через сеть Интернет, сеть сотовой или спутниковой подвижной связи;
- на тракторе установлены виброизмерительные или виброакустические датчики диагностических параметров, а цифровой вычислитель осуществляет анализ текущего технического состояния трактора, прогноз его изменения во времени, оценку вероятностей наступления отказов и риска возникновения аварийных ситуаций при эксплуатации трактора с программной реализацией вибродиагностического или виброакустического метода контроля, или метода акустической эмиссии. При этом виброизмерительные или виброакустические датчики закреплены на поверхности узлов и агрегатов трактора таким образом, чтобы оси их чувствительности были перпендикулярны направлению виброударных нагрузок, вызванных движением трактора;
- в состав датчиков рабочих параметров трактора входят датчики теоретической скорости левого и правого борта, тягового усилия трактора, угловой скорости ДВС, мгновенного расхода топлива или уровня топлива в баке, температуры охлаждающей жидкости, температуры и давления в системе смазки ДВС и трансмиссии и буксования движителя трактора. При этом датчик расхода топлива или уровня топлива выполнен с возможностью контроля плотности и/или температуры топлива;
- в состав датчиков рабочих параметров трактора входит навигационное или инерциальное измерительное устройство, выполненное на основе 3-осевого гироскопа, 3-осевого акселерометра и/или приемника глобальной навигационной спутниковой системы ГЛОНАСС/GPS, а цифровой вычислитель обрабатывает его сигналы и определяет углы продольного и поперечного наклона трактора, продольного, поперечного и вертикального ускорения трактора, действительную скорость его движения, буксование движителя и/или местоположения трактора, а также осуществляет стабилизацию видеоизображения, записываемого в энергонезависимую память;
- цифровой вычислитель выявляет несанкционированный расход (слив) топлива, запись информации о количестве и времени этого несанкционированного расхода в энергонезависимую память, а также обеспечивает отображение этой информации на панели оператора.
Реализация одного из указанных альтернативных признаков независимого пункта формулы изобретения или одновременно нескольких альтернативных признаков в их любом сочетании приводит к достижению одного и того же технического результата - к повышению эксплуатационной надежности работы трактора, под которой подразумевается увеличение интервала времени, в течение которого отсутствуют непредвиденные недопустимые изменения способности трактора выполнять требуемые функции в заданных режимах и условиях его применения.
Повышение надежности обусловлено комплексом объективных и субъективных причин.
Реализация непрерывного слежения (мониторинга) за техническим состоянием трактора в процессе его эксплуатации с последующей реализацией мер по предупреждению возникновения отказов является эффективным способом обеспечения высокого уровня эксплуатационной надежности трактора.
К этим мерам относится введение ограничений на максимальное тяговое усилие, скорость движения или иные параметры работы трактора в зависимости от его технического состояния, реализация планово-предупредительной стратегии ТО и ремонта, предусматривающей своевременное выявление развивающихся предотказных состояний, предотвращение отказов путем своевременных профилактических замен деталей и расходных материалов и т.д.
К субъективными причинам повышения эксплуатационной надежности трактора относится предоставление оператору объективной информации о режимах его работы и техническом состоянии, а также рекомендаций по наилучшему управлению трактором в сложившихся штатных или аварийных ситуациях. Это дает оператору возможность избежать действий по управлению трактором, которые могут привести к его отказу.
Реализация так называемого «черного ящика», т.е. регистрации (обработки и записи в энергонезависимую память) параметров, режимов и условий безотказной работы трактора, в том числе регистрации воздействий оператора на органы управления трактором, включая воздействия с нарушениями правил эксплуатации, а также реализация оценки его квалификации, обеспечивает эффективный непрерывный контроль за работой оператора. В случае возникновения отказа или аварии трактора, на основании данных регистратора параметров (информации, накопленной в энергонезависимой памяти) может быть установлена вина оператора в их возникновении, и в отношении него могут быть применены соответствующие санкции.
Оператор при наличии контроля за его действиями, как показывает практика, допускает существенно меньше нарушений установленных правил эксплуатации трактора, что приводит к сокращению количества его отказов.
Поэтому каждое из предложенных технических решений, обеспечивающее повышение точности, полноты или объективности регистрации рабочих и диагностических параметров трактора, а также результатов их анализа и обработки, приводит к повышению эксплуатационной надежности работы трактора.
Дополнительно причинно-следственные связи между признаками предложенного изобретения и достигаемым техническим результатом показаны при описании примеров реализации предложенного трактора с регистратором параметров.
На чертеже представлена упрощенная схема устройства.
Трактор с регистратором параметров содержит остов, моторно-трансмиссионную установку (МТУ) 1, ходовую систему 2, состоящую из колесного или гусеничного движителя 3 и подвески, кабину 4 с рабочим местом оператора, рабочее оборудование 5, органы 6 и механизмы управления 7 МТУ 1 и рабочим оборудованием 5, панель оператора 8 и контроллер 9, выполненный автономным или встроенным в панель оператора 8.
Контроллер, преимущественно электронный микропроцессорный, может именоваться также блоком управления, управляющим контроллером, микропроцессорным контроллером и т.д., что не имеет принципиального значения.
Органы управления 6, в зависимости от исполнения механизмов управления (приводов) 7 МТУ и рабочим оборудованием трактора, могут быть выполнены в виде электрических джойстиков, гидравлических аппаратов управления или механических рычагов, переключателей и т.п.
Для управления работой МТУ и рабочим оборудованием трактора от контроллера 9 механизмы управления (приводы) 7 могут иметь дополнительные электрические входы управления. Например, гидравлический привод (механизм) управления 7 может содержать электрогидравлический клапан, при подаче напряжения на который осуществляется блокирование движения управляемого им механизма.
Трансмиссия трактора может быть механической, гидромеханической, гидростатической или электрической.
В состав контроллера 9 входит энергонезависимое запоминающее устройство (блок памяти) 10, часы реального времени 11, цифровой вычислитель 12 и устройство ввода/вывода информации 13, выполняющее функции проводного или беспроводного интерфейса при обмене информации с внешним устройством 14.
Основные функциональные блоки контроллера 9 могут быть реализованы на основе микроконтроллера или цифрового сигнального процессора. В частности, в виде единой микросхемы могут быть реализованы энергонезависимое запоминающее устройство 10, часы реального времени 11, цифровой вычислитель 12 и сигнальная часть устройства ввода/вывода информации 13. В этом случае контроллер 9 содержит микроконтроллер или цифровой сигнальный процессор, цепи его питания, кварцевый резонатор, цепи защиты от перенапряжений и другие вспомогательные электронные элементы и устройства.
Внешнее устройство 14, использующееся для обмена информацией с контроллером 9, может быть выполнено в виде флеш-накопителя Universal Serial Bus (USB) или Secure Digital Memory Card (карты SD), а также персонального компьютера, оснащенного интерфейсом для обмена данными с контроллером 9 через сеть Интернет, сеть сотовой связи GSM/GPRS, CDMA или систему спутниковой подвижной связи.
Датчики рабочих и диагностических параметров трактора 15 могут быть как дискретными (пороговыми, релейными), так и аналоговыми (пропорциональными).
Под рабочими параметрами в данном случае подразумеваются тяговое усилие трактора, скорость его движения, буксование движителя и другие параметры, непосредственно характеризующие работу трактора и его узлов и агрегатов при выполнении тех функций, для которых предназначен данный трактор.
Под диагностическими параметрами подразумеваются вибрации, акустические шумы и другие параметры трактора, не связанные с выполнением его основных функций и контролируемые с целью оценки технического состояния трактора и его узлов и агрегатов.
Однозначная классификация рабочих и диагностических параметров отсутствует. Поэтому отнесение какого-либо датчика к категории рабочего или диагностического не имеет принципиального значения.
К датчикам рабочих параметров трактора 15 относятся, в частности, датчики теоретической скорости левого и правого борта (датчики угловой скорости бортовых редукторов или ведущих колес), тягового усилия трактора, угловой скорости ДВС, мгновенного расхода топлива или уровня топлива в баке (предпочтительно, с возможностью контроля плотности и температуры топлива), температуры охлаждающей жидкости, температуры и давления в системе смазки ДВС и трансмиссии, буксования движителя трактора и т.д.
К этим датчикам относится также навигационное или инерциальное измерительное устройство, выполненное, в общем случае, на основе 3-осевого гироскопа, 3-осевого акселерометра и/или приемника глобальной навигационной спутниковой системы ГЛОНАСС/GPS. Это устройство позволяет определить (измерить) углы продольного и поперечного наклона трактора (наклона грунтовой поверхности), продольного, поперечного и вертикального ускорения трактора, действительную скорость его движения, буксование движителя и местоположение трактора.
К диагностическим датчикам относятся, в частности, виброизмерительные или виброакустические датчики 15, которые используются цифровым вычислителем 12 для реализации вибродиагностического метода контроля технического состояния трактора или виброакустического метода такого контроля, именуемого также методом акустической эмиссии. Эти датчики, при наличии технической возможности, закреплены на поверхности узлов или агрегатов трактора таким образом, чтобы оси их чувствительности были перпендикулярны направлению виброударных нагрузок, вызванных движением трактора.
В состав датчиков 15 может входить также видеокамера, установленная на тракторе с возможностью обзора его рабочей зоны или рабочего органа 5. В этом случае контроллер 9 (цифровой вычислитель 12), используя выходные сигналы навигационного или инерциального измерительного устройства, осуществляет стабилизацию видеоизображения, записываемого в энергонезависимую память 10.
В общем случае состав датчиков 15 определяется при разработке трактора и зависит от его конструкции и требуемых показателей надежности.
Контроллер 9, панель оператора 8, органы 6 и механизмы 7 управления МТУ 1 и рабочим оборудованием 5, датчики рабочих и диагностических параметров 15 и другие электронные или электромеханические устройства, если они имеются на тракторе, соединены между собой, предпочтительно, шиной последовательной цифровой передачи данных, выполненной с физическим уровнем промышленной сети CAN (Controller Area Network), определенным в стандарте ISO 11898, и протокола высокого уровня CANopen, или DeviceNet, или CAN Kingdom, или J1939. Возможно также применение интерфейса цифровой передачи данных LIN (Local Interconnect Network - интерфейс для автомобильных систем), J1850 (SAE), CarLink, VAN, A-bus, RS-232C (COM - порт), RS-485 (Recommended Standard 485), «токовая петля», MIDI, MicroLAN, Ethernet, USB и т.д.
Двигатель внутреннего сгорания трактора, предпочтительно дизельный, может иметь отдельный контроллер и отдельные датчики параметров его работы, которые также подключены к шине CAN или к иной шине последовательной цифровой передачи данных.
Возможно также применение параллельных линий (отдельных проводов) для связи между собой отдельных электронных устройств трактора.
Панель оператора 8 выполнена, предпочтительно, на основе микроконтроллера и содержит графические, символьные и/или электромеханические (стрелочные) устройства отображения информации о параметрах и режимах работы трактора, а также звуковые и/или световые сигнализаторы их предельных состояний. На панели оператора 8 могут быть установлены органы управления этой панелью, использующиеся, например, для переключения отображаемых параметров, а также отдельные (вспомогательные, сервисные, дублирующие) органы управления трактором и его рабочим оборудованием, выполненные, например, в виде бесконтактных или квазисенсорных клавиш, кнопок или переключателей.
Трактор работает следующим образом.
Оператор (тракторист, машинист) с помощью органов управления 6, расположенных в кабине 4 трактора, задает направление и скорость его движения.
Моторно-трансмиссионная установка (МТУ) 1 создает крутящий момент, который через бортовые редукторы передается на ходовую систему 2 и далее на колесный или гусеничный движитель 3, приводя трактор в движение.
Дополнительно оператор при помощи органов управления 6 управляет положением рабочего оборудования, например отвалом бульдозера. В результате этого трактор, работающий в агрегате с рабочим оборудованием 5, выполняет те функции, для которых он предназначен.
При этом цифровой вычислитель 12 периодически записывает в энергонезависимую память 10 информацию о рабочих и/или диагностических параметрах трактора, получаемых с помощью датчиков 15. Далее цифровой вычислитель 12 обрабатывает накопленную информацию и, в случае выявления отклонения какого-либо параметра за его верхнее или нижнее предельно-допустимое значение, предварительно записанное в энергонезависимой памяти 10, формирует и передает на панель оператора 8 предупреждающие сигналы, а также формирует и передает на механизмы управления 7 МТУ 1 и рабочим оборудованием 5 сигналы блокирования (остановки) остановки их работы. Например, в случае недопустимого снижения давления масла в системе смазки двигателя моторно-трансмиссионной установки (МТУ) формирует сигнал, информирующий оператора о недопустимости работы двигателя. Далее, если оператор не предпринимает необходимых действий по устранению аварийной ситуации, через установленный интервал времени формирует сигнал аварийной остановки двигателя. Аналогичным образом контроллер формируется другие предупреждающие сигналы и сигналы аварийной остановки трактора, например, при превышении максимально допустимого угла продольного или поперечного наклона трактора.
В первом варианте реализации трактора с регистратором параметров цифровой вычислитель 12, работая по программе, предварительно записанной в энергонезависимой памяти 10, путем анализа изменений во времени одного или нескольких рабочих и/или диагностических параметров, осуществляет прогноз продолжительности работы трактора, в течение которой их величины не выйдут за установленные предельно допустимые значения.
Трактор в процессе эксплуатации подвержен действию различных внутренних и внешних процессов, вызывающих необратимые изменения его характеристик, которые приводят к прогрессивному ухудшению его параметров с течением времени. К числу этих процессов относятся, в частности, износ кинематических пар, коррозия металла, коробление металлических конструкций, вызванное внешними нагрузками; деградация рабочих жидкостей, засорение фильтрующих элементов и т.д.
Для прогнозирования продолжительности работы трактора, в течение которой контролируемые параметры будут находиться в допустимых пределах, необходима информация о закономерности изменения во времени этих параметров от тех факторов, от которых это состояние зависит. Эти закономерности предварительно определяются расчетным или экспериментальным путем, записываются в энергонезависимую память 10 и далее используются цифровым вычислителем 12.
Цифровой вычислитель 12, после определения (прогноза) этой продолжительности, отображает на панели оператора информацию о времени работы трактора, оставшемся до проведения его технического обслуживания (ТО) или ремонта. Например, на панели оператора 8 отображается информация о времени предстоящей замены фильтрующих элементов, рабочей жидкости, планово-предупредительного ремонта двигателя внутреннего сгорания или гидротрансформатора и т.д.
Прогнозирование возможного возникновения неблагоприятного технического состояния трактора с последующей разработкой и реализаций рекомендаций по его предупреждению приводит к повышению надежности трактора.
В тракторе с регистратором параметров в случае реализации второго альтернативного признака предложенного технического решения цифровой вычислитель 12 путем анализа изменений рабочих и/или диагностических параметров трактора и показаний часов реального времени контролирует своевременность проведения ТО трактора.
Для обеспечения такой возможности в энергонезависимую память 10 предварительно записаны изменения рабочих и/или диагностических параметров, которые должны произойти при проведении ТО, и время этого ТО. Например, при замене фильтрующего элемента в системе смазки трансмиссии произойдет снижение давления на нем. При замене рабочей жидкости во время ТО произойдет сначала уменьшение, а затем увеличение ее уровня в соответствующем баке.
Цифровой вычислитель 12, выявив отсутствие необходимого ТО, записывает информацию о таком нарушении правил эксплуатации трактора в энергонезависимую память 10 регистратора параметров и передает ее на панель оператора 8. Это дает возможность устранить такое нарушение и, соответственно, повысить надежность работы трактора.
В третьем варианте трактора, независимо от реализации двух указанных выше альтернативных признаков изобретения или в дополнение к ним, цифровой вычислитель 12 путем анализа текущих значений и изменений во времени рабочих и/или диагностических параметров трактора дает оценку текущего технического состояния трактора и прогноз его изменения, оценивает вероятности наступления отказов и риск возникновения аварийных ситуаций при эксплуатации трактора, после чего на основе этих оценок определяет предельно-допустимый срок эксплуатации трактора (остаточный ресурс), записывает его величину в запоминающее устройство 10 и передает на панель оператора 8.
Для реализации этих функций в запоминающем устройстве 10 предварительно записана информация в виде базы данных или модели, характеризующей взаимосвязь текущих значений и изменений во времени рабочих и/или диагностических параметров трактора с его остаточным ресурсом. Эти взаимосвязи определяются при проектировании трактора либо устанавливаются экспериментально путем сбора информации о работе тракторов в эксплуатации. При этом выявляется комплекс рабочих и/или диагностических параметров трактора (уровень шума и вибраций, градиенты температур, уровни давлений и т.д.), которые несут наиболее достоверную информацию о состоянии трактора, выбираются те режимы работы трактора, при которых эти параметры несут максимально необходимую информацию для оценки текущего технического состояния трактора, и устанавливаются законы изменения этих параметров и их предельно допустимые значения в зависимости от времени наработки трактора. При этом могут быть получены аппроксимирующие функции, описывающие тенденции изменения параметров трактора в зависимости от времени его наработки. Вид каждой такой функции выбирается исходя из результатов исследований по совокупности наблюдений за партией тракторов, а коэффициенты у этих функций рассчитывают по данным о конкретном тракторе. Далее цифровой вычислитель 12 использует эти функции для оценки вероятности возникновения отказов и остаточного ресурса трактора.
Управление трактором или его использование по назначению, например, в более легких или более тяжелых нагрузочных режимах, в зависимости от величины его остаточного ресурса, обеспечивает повышение надежности его работы.
В четвертом варианте реализации трактора цифровой вычислитель 12 осуществляет изменение предельно допустимой величины какого-либо рабочего и/или диагностического параметра, характеризующего нагрузочные и/или скоростные режимы работы трактора, в зависимости от величины другого параметра, и далее формирует сигналы, необходимые для реализации управления трактором, при котором не происходит превышения этой предельно допустимой величины. Функциональные зависимости предельно допустимых величин одних параметров от значений других параметров также предварительно записаны в энергонезависимой памяти 10. Например, реализуется ограничение скорости движения или тягового усилия трактора в зависимости от уровня вибраций корпуса главной передачи трансмиссии или температуры масла в ее системе смазки, что также повышает надежность работы трактора.
В пятом варианте реализации трактора цифровой вычислитель 12 выявляет нарушения оператором установленных правил эксплуатации трактора, записывает информацию об этих нарушениях в энергонезависимую память 10 и передает ее для отображения на панель оператора. К таким нарушениям, предварительно записанным в энергонезависимую память 10 в виде допустимых сочетаний или функциональных взаимосвязей рабочих и/или диагностических параметров, относятся, в частности, превышение предварительно установленной максимально допустимой величины вертикального, продольного или поперечного ускорения трактора, скорости движения трактора, угловой скорости двигателя внутреннего сгорания (ДВС), угла уклона трассы движения и/или длительности работы с повышенным буксованием движителя.
Сокращение таких нарушений способствует повышению эксплуатационной надежности трактора.
К этому же результату в следующем варианте реализации трактора с регистратором параметров приводит реализация цифровым вычислителем 12 оценки квалификации оператора при управлении трактором по предварительно установленному критерию, а также запись информации об этой квалификации в энергонезависимую память и ее передача на панель оператора 8. Для этого в энергонезависимую память 10 предварительно записываются функциональные зависимости производительности, экономичности или безопасности работы трактора от изменений рабочих и/или диагностических параметров трактора. При этом в качестве критерия оценки квалификации оператора может использоваться объем выполненных трактором работ в единицу времени, соотношение расхода топлива и выполненного объема работ или количество случаев превышения предельно допустимых параметров работы трактора в единицу времени.
В том случае, если при оценке квалификации учитывается расход топлива, контроллер 9 дополнительно выявляет и учитывает его несанкционированный расход (слив).
В седьмом варианте трактора с регистратором параметров реализован альтернативный признак изобретения, характеризующийся заблаговременным определением потребности о запасных (быстроизнашивающихся) частях и расходных материалах, необходимых для проведения ТО и планово-предупредительных ремонтов трактора. В этом случае цифровой вычислитель 12, считывая показания часов реального времени 11 и информацию о ТО и и планово-предупредительных ремонтах, предварительно записанную в энергонезависимую память 10, определяет потребность в этих запасных частях и расходных материалах для проведения ближайшего по времени ТО или планово-предупредительного ремонта и передает эту информацию на панель оператора и на внешнее устройство или пункт технического обслуживания трактора.
Своевременная замена быстроизнашивающихся частей и расходных материалах, обусловленная их наличием, также приводит к повышению надежности трактора.
При расследовании причин возникновения отказов или аварий трактора используются данные регистратора параметров (информация в энергонезависимой памяти 10). При этом может быть установлена вина оператора в их возникновении, и, соответственно, в отношении него могут быть применены административные или экономические санкции. Поэтому любые методы повышения информативности и достоверности данных регистратора параметров, непосредственно определяющие эффективность контроля за действиями оператора, усиливают дисциплинирующий фактор в обеспечении надежности работы трактора, способствуют снижению числа нарушений правил его эксплуатации.
К такому методу, реализованному в следующем варианте трактора с регистратором параметров, относится запись в энергонезависимую память 10 информации о рабочих и диагностических параметрах трактора, о результатах их анализа и обработки с сокращенным (малым) периодом и с последующим стиранием части этих записей. В этом случае, при том же объеме энергонезависимой памяти, в интервале времени, предшествующем аварии трактора, сохранится запись параметров с малым периодом, т.е. эта запись будет более информативна. Это позволить провести более объективное расследование причин аварии.
Другим методом, реализующим следующий альтернативный признак изобретения, является реализация записи в энергонезависимую память 10 информации с переменным периодом, величина которого обратно пропорциональна тяговому усилию, скорости движения трактора и/или скорости их изменения. Это позволяет получить более информативную запись параметров в тех интервалах времени, в которых возникновение аварий или отказов трактора более вероятно.
Еще одним методом повышения информативности и достоверности регистрации параметров является запись информации с сокращенным периодом в случае отклонения какого-либо рабочего или диагностического параметра трактора за его нижнее или верхнее предельно допустимое значение, либо в случае поступления от оператора команды на ускоренную (более подробную) запись, если им выявлены какие-либо отклонения от нормальных режимов работы трактора.
Эту же цель преследует реализует видеорегистрация работы трактора, а также запись в энергонезависимую память информации о воздействиях оператора на органы управления МТУ и рабочим оборудованием трактора. В этом случае путем анализа информации в энергонезависимой памяти 10 (информации регистратора параметров) можно непосредственно выявить ошибочные действия оператора по управлению трактором. В тех интервалах времени, в которых осуществляются воздействия оператора на органы управления, запись информации в энергонезависимую память 10 может осуществляться с сокращенным периодом.
Следующим методом улучшения регистрации параметров является запись информации в энергонезависимую память независимо от наличия напряжения в бортовой сети трактора. В этом случае используется автономный источник питания контроллера 9 и соответствующих датчиков 15, что дает возможность осуществлять эту запись при попытках умышленного или непреднамеренного отключения регистратора параметров (контроллера 9).
Возможна также реализация альтернативных признаков изобретения, предусматривающих не менее чем двухкратную запись информации в различные части энергонезависимой памяти 10 контроллера 12 или в дополнительно установленное энергонезависимое запоминающее устройство, запись с применение алгоритмов шифрования, обнаружения ошибок, исправления ошибок этой записи и/или с добавлением неизменяемого идентификационного номера трактора.
В следующих вариантах реализации трактора с регистратором параметров, обеспечивающих повышение надежности, цифровой вычислитель 12 выявляет отсутствие регистрации параметров, либо наличие ошибок в записываемой информации и далее информирует об этом оператора, либо автоматически блокирует работу трактора. Реализация этого альтернативного признака изобретения направлена на предотвращение работы трактора без регистрации параметров.
Эффективность реализации предложенных мер повышения надежности зависит от достоверности информации, получаемой от датчиков рабочих и диагностических параметров трактора. В варианте трактора с регистратором параметров, реализующем альтернативные признаки изобретения, относящиеся к повышению этой достоверности, цифровой вычислитель 12 выявляет неисправные датчики с помощью средств самоконтроля, встроенных в эти датчики, либо путем выявления противоречий в их выходных сигналах. Например, если от навигационного или инерциального измерительного устройства получен сигнал о прямолинейном движении трактора, а от датчика угловой скорости левого или правого бортового редуктора сигнал не поступает, то цифровой вычислитель 12 идентифицирует отказ датчика угловой скорости.
Далее цифровой вычислитель 12 записывает информацию о неисправных датчиках в энергонезависимую память 10, передает ее на панель оператора для отображения, а также, в случае необходимости, формирует сигнал остановки трактора.
Надежность работы трактора в значительной степени зависит от квалификации оператора, особенно от правильности его действий в непредвиденных и аварийных ситуациях. В очередном варианте трактора с регистратором параметров, с целью повышения этой надежности, цифровой вычислитель 12, после анализа текущего режима работы трактора, осуществляет выбор из энергонезависимой памяти 10 и передачу на панель оператора 8 рекомендаций по оптимальным (наилучшим) действиям оператора по управлению трактором в нормальных и аварийных режимах его работы. Информация о возможных вариантах таких действий предварительно записана в энергонезависимую память 10 в виде базы данных.
В случае замены на тракторе контроллера возникает необходимость перезаписи в него информации с того контроллера, который был ранее установлен на этот трактор. Для повышения полноты и достоверности данных о работе трактора в энергонезависимую память 10 может вводиться информация о техническом состоянии трактора, полученная с помощью внешних устройств. Может также потребоваться внесение изменений в программу работы цифрового вычислителя 12.
Для реализации такой возможности и соответствующего повышения надежности работы трактора контроллер 9 осуществляет прием и запись в энергонезависимую память 10 информации о техническом состоянии трактора, его работе за предыдущий период времени или информации, необходимой для изменения программы работы цифрового вычислителя 12, введенной с панели оператора в ручном режиме или полученной от внешнего устройства 14.
Во всех случаях когда контроллер 9 выводит на панель оператора 8 какие-либо требования или рекомендации по управлению трактором, а оператор их не выполняет, контроллер 9 через установленный интервал времени может сформировать сигнал остановки трактора. Благодаря этому снижается вероятность возникновения отказов трактора, что также повышает его эксплуатационную надежность.
В тракторе с регистратором параметров может быть реализован как один из перечисленных альтернативных признаков изобретения, так и одновременно несколько признаков в их любом сочетании. При этом достигаемый уровень повышения эксплуатационной надежности трактора определяется полнотой реализации этих признаков.
Для специалистов в данной области техники понятно, что кроме описанных вариантов трактора с регистратором параметров возможны также иные варианты его реализации на основе признаков, изложенных в формуле изобретения.
Источники информации
1. RU 94018123 Al, G01M 17/06, 27.08.1996.
2. Шипилевский Г.Б. Электронное оборудование тракторов. - М.: МГТУ «МАМИ», 2000. - 23 с.
3. RU 23602 U1, B62D 63/02, 27.06.2002.
4. US 2005/0131598 A1, G06F 19/00, 16.06.2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНАЯ РАБОЧАЯ МАШИНА С УСТРОЙСТВАМИ ДЛЯ ЕЕ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ | 2014 |
|
RU2569711C2 |
| ТРАКТОРНЫЙ АГРЕГАТ С СИСТЕМОЙ ОГРАНИЧЕНИЯ ДОСТУПА К ЕГО УПРАВЛЕНИЮ | 2014 |
|
RU2557107C1 |
| САМОХОДНАЯ РАБОЧАЯ МАШИНА, ПРИСПОСОБЛЕННАЯ ДЛЯ ЭКСПЛУАТАЦИИ В ЗИМНИХ УСЛОВИЯХ | 2015 |
|
RU2585398C1 |
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
| СПОСОБ РЕГИСТРАЦИИ И РЕГИСТРАТОР ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2005 |
|
RU2307060C2 |
| СПОСОБ И УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2004 |
|
RU2280609C2 |
| САМОХОДНАЯ МАШИНА С УЛУЧШЕННЫМИ УСЛОВИЯМИ ТРУДА | 2015 |
|
RU2610327C1 |
| СПОСОБ ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО МЕХАНИЗМА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2267457C2 |
| ИНДИКАТОРНОЕ УСТРОЙСТВО РАБОЧЕЙ МАШИНЫ | 2014 |
|
RU2568695C1 |
| СИСТЕМА ЭЛЕКТРООБОРУДОВАНИЯ ГУСЕНИЧНОЙ МАШИНЫ | 2014 |
|
RU2550876C1 |
Изобретение относится к промышленным и сельскохозяйственным тракторам и агрегатам на их базе, в частности к бульдозерам. Технический результат заключается в повышении эксплуатационной надежности работы трактора. Для этого предложен трактор с регистратором параметров, который содержит остов с установленной на нем моторно-трансмиссионной установкой, ходовую систему, состоящую из колесного или гусеничного движителя и подвески, соединяющей движитель с остовом, кабину с рабочим местом оператора, рабочее оборудование, органы и механизмы управления моторно-трансмиссионной установкой и рабочим оборудованием, панель оператора, контроллер, в состав которого входит энергонезависимое запоминающее устройство, часы реального времени, цифровой вычислитель и устройство ввода/вывода информации, приспособленное для проводной или беспроводной передачи информации на внешнее устройство, а также датчики рабочих и диагностических параметров трактора. Контроллер осуществляет обработку, накопление и хранение в энергонезависимой памяти информации о рабочих и диагностических параметрах трактора. Дополнительно, в зависимости от варианта реализации предложенного устройства, осуществляется прогноз времени работы трактора до проведения ТО, оценка его остаточного ресурса, выявление нарушения оператором правил эксплуатации трактора, оценка его квалификации, предоставление оператору информации и рекомендаций по управлению трактором, взаимосвязанное регулирование параметров, реализация ряда мер по повышению информативности и достоверности регистрации рабочих параметров трактора. 13 з.п. ф-лы, 1 ил.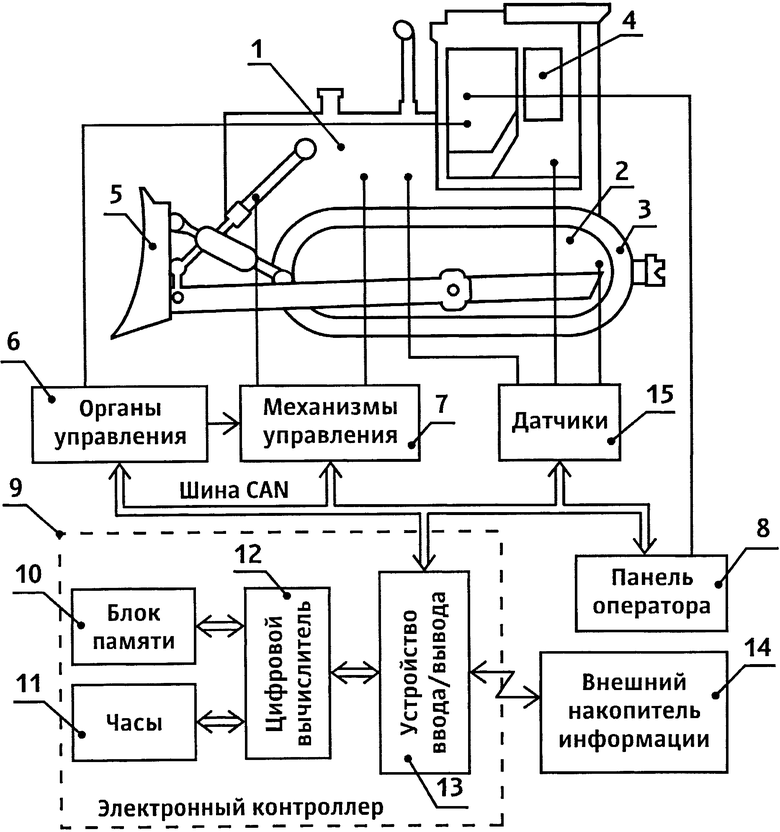
1. Трактор с регистратором параметров, содержащий остов с установленной на нем моторно-трансмиссионной установкой, ходовую систему, состоящую из колесного или гусеничного движителя и подвески, соединяющей движитель с остовом, кабину с рабочим местом оператора, рабочее оборудование, органы и механизмы управления моторно-трансмиссионной установкой и рабочим оборудованием, панель оператора, контроллер, выполненный автономным или встроенным в панель оператора, в состав которого входит энергонезависимое запоминающее устройство, часы реального времени, цифровой вычислитель и устройство ввода/вывода информации, приспособленное для проводной или беспроводной передачи информации на внешнее устройство, а также датчики рабочих и/или диагностических параметров трактора, подключенные к контроллеру, который выполнен с возможностью накопления и хранения в энергонезависимом запоминающем устройстве информации о рабочих и/или диагностических параметрах трактора, обработки этой информации и, в случае выявления отклонения, по меньшей мере, одного из этих параметров за верхнее и/или нижнее предельное значение, формирования и передачи на панель оператора предупреждающего сигнала и/или формирования и передачи на механизмы управления моторно-трансмиссионной установкой и/или рабочим оборудованием трактора сигнала остановки их работы, причем цифровой вычислитель, в соответствии с программой его работы, предварительно записанной в энергонезависимое запоминающее устройство, дополнительно выполнен с возможностью реализации, по меньшей мере, одной из следующих функций:
а) определения, путем анализа изменений во времени, по меньшей мере, одного рабочего и/или диагностического параметра трактора, прогнозируемой продолжительности работы трактора, в течение которой можно ожидать, что величина этого параметра не выйдет за его верхнее и/или нижнее предельно допустимое значение, предварительно записанное в энергонезависимое запоминающее устройство, а также формирования и передачи на панель оператора информации о допустимом времени работы трактора до проведения его технического обслуживания или ремонта и/или о дате предстоящего технического обслуживания или ремонта;
б) выявления, путем анализа изменений рабочих и/или диагностических параметров трактора и показаний часов реального времени, своевременности проведения технического обслуживания трактора, формирования сигнала об отсутствии технического обслуживания и его записи в энергонезависимое запоминающее устройство и/или передачи на панель оператора для отображения;
в) проведения анализа текущих значений и изменений во времени рабочих и/или диагностических параметров трактора и оценки в результате этого анализа текущего технического состояния трактора, прогноза изменения этого технического состояния во времени, оценки вероятностей наступления отказов и риска возникновения аварийных ситуаций при эксплуатации трактора и, на основе этих оценок, установления предельно-допустимого срока эксплуатации трактора, а также записи величины этого предельно-допустимого срока эксплуатации в энергонезависимое запоминающее устройство и/или передачи информации об этом сроке на панель оператора для отображения;
г) определения, путем анализа, по меньшей мере, одного рабочего и/или диагностического параметра трактора, предельно допустимой величины, по меньшей мере, одного другого рабочего и/или диагностического параметра трактора, характеризующего нагрузочные и/или скоростные режимы его работы, а также формирования и передачи на панель оператора информации, необходимой для реализации такого управления трактором, при котором его тяговое усилие и/или скорость движения не превышает предельно допустимую величину, и/или передачи на механизмы управления моторно-трансмиссионной установкой и/или рабочим оборудованием трактора таких сигналов управления, при которых тяговое усилие и/или скорость движения трактора не превышает предельно допустимую величину;
д) выявления, путем анализа изменений рабочих и/или диагностических параметров трактора, нарушений оператором предварительно установленных правил эксплуатации трактора, записанных в энергонезависимое запоминающее устройство в виде допустимых сочетаний или функциональных взаимосвязей этих параметров, записи информации о выявленных нарушениях в энергонезависимое запоминающее устройство и передачи этой информации на панель оператора для ее отображения;
е) оценки, путем анализа изменений рабочих и/или диагностических параметров трактора, квалификации оператора при управлении трактором по предварительно установленному критерию оценки производительности, и/или экономичности, и/или безопасности работы трактора, предварительно записанному в энергонезависимое запоминающее устройство в виде функции этих параметров, программно реализуемой контроллером, а также записи информации о квалификации оператора в энергонезависимое запоминающее устройство и/или ее передачи на панель оператора для отображения;
ж) выявления, путем анализа изменений рабочих и/или диагностических параметров трактора, показаний часов реального времени и предварительно записанной в энергонезависимое запоминающее устройство информации о запасных частях и расходных материалах, необходимых для проведения технических обслуживаний и планово-предупредительных ремонтов, потребности в этих запасных частях и расходных материалах для проведения ближайшего по времени технического обслуживания или планово-предупредительного ремонта, а также записи информации об этой потребности в энергонезависимое запоминающее устройство, и/или ее передачи на панель оператора для отображения, и/или ее дистанционной передачи на внешнее устройство или пункт технического обслуживания трактора;
з) записи в энергонезависимое запоминающее устройство информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с сокращенным периодом и последующего стирания части этих записей после истечения установленного интервала времени;
и) записи в энергонезависимое запоминающее устройство информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с периодом, величина которого обратно пропорциональна тяговому усилию, и/или скорости движения трактора, и/или скорости их изменения;
к) записи в энергонезависимое запоминающее устройство информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с сокращенным периодом в случае отклонения, по меньшей мере, одного их этих параметров за его нижнее или верхнее предельно допустимое значение, и/или в случае формирования оператором сигнала записи этих параметров с сокращенным периодом с помощью органа управления, расположенного на панели оператора;
л) записи в энергонезависимое запоминающее устройство информации о воздействиях оператора на органы управления моторно-трансмиссионной установкой и рабочим оборудованием трактора, полученной с помощью датчиков положения этих органов управления;
м) записи в энергонезависимое запоминающее устройство информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки независимо от наличия напряжения в бортовой сети трактора с использованием дополнительно установленного автономного источника питания, подключенного к цепям питания контроллера и, по меньшей мере, одного датчика рабочего и/или диагностического параметра трактора;
н) не менее чем двухкратной записи информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки в различные части энергонезависимого запоминающего устройства, входящего в состав контроллера, и/или в дополнительно установленное энергонезависимое запоминающее устройство, входящее в состав одного из устройств трактора или подключенное к нему;
о) записи в энергонезависимое запоминающее устройство информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки с применением алгоритмов шифрования, и/или обнаружения ошибок, и/или исправления ошибок этой записи, и/или с добавлением неизменяемого идентификационного номера трактора, который предварительно записан в части энергонезависимого запоминающего устройства, недоступной для изменений, или в часах реального времени, или в дополнительно установленном постоянном запоминающем устройстве, подключенном к контроллеру;
п) выявления отсутствия записи и/или ошибок в записи информации о рабочих и/или диагностических параметрах трактора и/или результатов их анализа и/или обработки в энергонезависимое запоминающее устройство и последующего формирования сигнала остановки трактора и передачи его на панель оператора и/или на механизмы управления моторно-трансмиссионной установкой и/или рабочим оборудованием трактора;
р) записи в энергонезависимое запоминающее устройство видеоинформации, полученной от дополнительно установленной видеокамеры, установленной на тракторе с возможностью обзора зоны работы трактора и/или его рабочего органа;
с) определения неисправных датчиков рабочих и/или диагностических параметров трактора с помощью средств самоконтроля, встроенных в эти датчики, и/или путем выявления противоречий в их выходных сигналах, записи информации о неисправных датчиках в энергонезависимое запоминающее устройство, а также ее передачи на панель оператора для отображения и/или формирования сигнала остановки трактора и его передачи на механизмы управления моторно-трансмиссионной установкой;
т) выбора, на основании анализа информации о рабочих и/или диагностических параметрах трактора, рекомендаций по оптимальным, по критерию безопасности или производительности работы трактора, действиям оператора по управлению трактором в нормальных и/или аварийных режимах его работы, из числа рекомендуемых действий оператора по управлению трактором, предварительно записанных в энергонезависимое запоминающее устройство в виде базы данных, а также последующей передачи этих рекомендаций на панель оператора для отображения;
у) приема от панели оператора и записи в энергонезависимое запоминающее устройство введенной оператором качественной и/или количественной информации о работе и/или техническом состоянии трактора;
ф) перезаписи из внешнего устройства в энергонезависимое запоминающее устройство информации о рабочих и/или диагностических параметрах трактора за предыдущий период его работы и/или информации, приспособленной для изменения программы работы контроллера.
2. Трактор по п.1, отличающийся тем, что к нарушениям оператором предварительно установленных правил эксплуатации трактора, записанных в энергонезависимом запоминающем устройстве, относится превышение предварительно установленной максимально допустимой величины вертикального, продольного или поперечного ускорения трактора, или скорости движения трактора, или угловой скорости двигателя внутреннего сгорания, и/или угла уклона трассы движения, и/или длительности работы с повышенным буксованием движителя.
3. Трактор по п.1, отличающийся тем, что критерием оценки квалификации оператора при управлении трактором является объем выполненных трактором работ в единицу времени, и/или соотношение расхода топлива и выполненного объема работ, и/или количество случаев превышения предельно допустимых параметров работы трактора в единицу времени, причем при проведении этой оценки учитывается буксование движителя трактора.
4. Трактор по п.1, отличающийся тем, что цифровой вычислитель выполнен с возможностью записи в энергонезависимое запоминающее устройство информации о рабочих и/или диагностических параметрах трактора и/или результатах их анализа и/или обработки в интервалах времени, в которых осуществляются воздействия оператора на органы управления моторно-трансмиссионной установкой и рабочим оборудованием трактора, с сокращенным периодом этой записи.
5. Трактор по п.1, отличающийся тем, что контроллер, панель оператора, органы управления моторно-трансмиссионной установкой и рабочим оборудованием и датчики рабочих и/или диагностических параметров трактора объединены между собой шиной последовательной цифровой передачи данных, выполненной с физическим уровнем промышленной сети Controller Area Network, сокращенно CAN, определенным в стандарте ISO 11898, и протокола высокого уровня CANopen, или DeviceNet, или CAN Kingdom, или J1939.
6. Трактор по п.1, отличающийся тем, что цифровой вычислитель дополнительно осуществляет контроль выполнения оператором отображаемых на панели оператора рекомендаций по управлению трактором в нормальных и/или аварийных режимах и осуществляет запись результатов этого контроля в энергонезависимое запоминающее устройство.
7. Трактор по п.6, отличающийся тем, что контроллер, в случае выявления невыполнения оператором рекомендаций по управлению трактором, отображаемых на панели оператора, в течение установленного интервала времени, формирует сигнал остановки трактора и передает его на механизмы управления моторно-трансмиссионной установкой.
8. Трактор по п.1, отличающийся тем, что внешнее устройство, приспособленное для обмена информацией с контроллером, выполнено в виде флеш-накопителя Universal Serial Bus (сокращенно USB) или Secure Digital Memory Card (сокращенно SD), или персонального компьютера, оснащенного средством для обмена данными с контроллером через сеть Интернет, или сеть сотовой связи, или систему спутниковой подвижной связи.
9. Трактор по п.1, отличающийся тем, что в состав датчиков диагностических параметров трактора входит, по меньшей мере, один виброизмерительный или виброакустический датчик, а цифровой вычислитель приспособлен для осуществления анализа текущего технического состояния трактора, прогноза изменения этого технического состояния во времени и оценки вероятностей наступления отказов и риска возникновения аварийных ситуаций при эксплуатации трактора путем программной реализации вибродиагностического или виброакустического метода контроля, или метода акустической эмиссии.
10. Трактор по п.9, отличающийся тем, виброизмерительный или виброакустический датчик закреплен на поверхности узла или агрегата трактора таким образом, что ось его чувствительности перпендикулярна направлению виброударных нагрузок, вызванных движением трактора.
11. Трактор по п.1, отличающийся тем, что в состав датчиков рабочих параметров трактора входят датчики теоретической скорости левого и правого борта трактора, тягового усилия трактора, угловой скорости двигателя внутреннего сгорания, мгновенного расхода топлива или уровня топлива в баке, температуры охлаждающей жидкости, температуры и давления в системе смазки двигателя внутреннего сгорания и трансмиссии и буксования движителя трактора.
12. Трактор по п.11, отличающийся тем, что датчик мгновенного расхода топлива или уровня топлива в баке выполнен с возможностью контроля плотности и/или температуры топлива.
13. Трактор по п.1, отличающийся тем, что в состав датчиков рабочих параметров трактора входит навигационное или инерциальное измерительное устройство, выполненное на основе 3-осевого гироскопа, и/или 3-осевого акселерометра, и/или приемника глобальной навигационной спутниковой системы, а цифровой вычислитель приспособлен для обработки его сигналов и определения углов продольного и поперечного наклона трактора, и/или продольного, и/или поперечного, и/или вертикального ускорения трактора, и/или действительной скорости его движения, и/или буксования движителя, и/или местоположения трактора, и/или стабилизации видеоизображения, записываемого в энергонезависимое запоминающее устройство.
14. Трактор по п.1, отличающийся тем, что контроллер приспособлен для выявления несанкционированного расхода топлива и записи информации о количестве и времени этого несанкционированного расхода в энергонезависимое запоминающее устройство, а также формирования и передачи информационного сигнала об этом расходе на панель оператора для его отображения.
| US 20050131598 A1, 16.06.2005 | |||
| СПОСОБ ЗАЩИТЫ И РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2010 |
|
RU2442742C1 |
| СИСТЕМА РЕГИСТРАЦИИ ПАРАМЕТРОВ РАБОТЫ ГРУЗОПОДЪЕМНОЙ МАШИНЫ (ЕЕ ВАРИАНТЫ) | 2005 |
|
RU2307059C2 |
| ЗЕРНОУБОРОЧНАЯ МАШИНА, ПРЕИМУЩЕСТВЕННО ЗЕРНОУБОРОЧНЫЙ КОМБАЙН, С МУЛЬТИПРОЦЕССОРНЫМ УПРАВЛЯЮЩИМ УСТРОЙСТВОМ | 1994 |
|
RU2154296C2 |

