Изобретение относится к сельскохозяйственной машине, в частности к зерноуборочному комбайну, состоящей из ряда узлов с приданными им микропроцессорами, из которых по меньшей мере один является операторским терминалом с клавиатурой управления и дисплеем и которые соединены с измерительными, настроечными и (или) индикаторными элементами соответствующих узлов и обрабатывают поступающие в эти узлы данные с целью управления и(или) регулирования или показа, причем эти микропроцессоры связаны между собой при помощи информационной шины через обычные цепи подключения интерфейсов и в текущем режиме передают через них согласно определенному протоколу необходимые конкретные рабочие параметры, например частоты вращения, скорость движения, время и т.п., вместе с конкретным идентификатором рабочих параметров.
Такое устройство опубликовано в журнале Landtechnik, N 47, с. 71-74, 1992 г. ("Диагноз неполадок", автор Готтшальк). При этом с помощью стандартной информационной шины CAN соединено в единую цепь несколько микропроцессоров, которые в свою очередь соединены с измерительными и настроечными элементами отдельных узлов, а именно с двигателем, шасси, рабочим звеном и индикаторным устройством, а также с диагностическим процессором, и обрабатывают их данные для управления и регулирования функций отдельных узлов, обмениваясь ими в соответствии со структурной подчиненностью и используя их для диагноза.
При этом предусматривается, что в отдельные узлы каждый раз в случае необходимости даются запросы от релевантного в данном случае другого узла относительно конкретных рабочих параметров, например частоты вращения, скорости движения, времени и т.п. Передача данных происходит согласно стандартному протоколу при помощи обычно применяемых цепей подключения интерфейсов, которые к тому же обеспечивают однонаправленный экстренный режим вместо обычного двунаправленного. Этот способ запроса необходимых данных из других узлов требует в сложных сельскохозяйственных машинах, в частности в зерноуборочных комбайнах, выполнения большого объема работ по кодированию и декодированию информации, что может потребовать применения большого пункта управления и приводить к длительному времени обработки информации в процессорах, а иногда и к недопустимо большим потерям времени в настроечных и регулировочных устройствах и к неполадкам в них.
Из патента ФРГ 3708324 A1 известно управляемое микропроцессором информационное устройство сельскохозяйственной машины, которое изображает на буквенно-цифровом 4-строчечном индикаторном табло заданные и измеренные конкретные параметры оборудования и режима работы, причем индицируемые понятия заимствуются из запрошенного в данном случае накопителя слов. Выдача или выбор данных по настройке и участков программы происходит в режиме диалога через цифровую клавиатуру и различные управляющие клавиши. Для того чтобы воспринять словесные указания в рабочих условиях, оператор вынужден уделять им повышенное внимание, отвлекаясь из-за этого от функций наблюдения за машиной и дорогой.
Из проспекта фирмы Philips, 82С200 (предварительное описание функций, с. 4-7) известен блок интерфейса для шины, содержащий узел фильтра приемлемости, посредством которого последовательно сравниваются идентификаторы, после чего дальше может пройти к подключенному микропроцессору только та информация, идентификатор которой соответствует одному из занесенных в память. Потери времени на последовательно выполняемые сравнения по номеру идентификатора сравнительно велики, причем информация, поступающая в это время, может иногда не приниматься и поэтому теряется, если вышестоящая структура программного обеспечения не обеспечит дополнительный контроль и повторный запрос о передаче той же информации. Из-за этого возникают дальнейшие потери времени, вследствие чего в практических применениях сельскохозяйственной техники осуществление передачи данных в режиме реального времени было бы возможно только при обмене весьма малым числом видов информации.
Задача данного изобретения заключается в том, чтобы в описанной выше сельскохозяйственной машине, в частности в ее управляющем устройстве, повысить эффективность информационного обмена между процессорами и оператором и вместе с тем физически разгрузить оператора. Решение состоит в том, что в отдельных микропроцессорах через включенный в данном случае идентификатор происходит обращение к полю кодовых маркеров, в которое занесены кодовые маркеры тех видов рабочих параметров, которые должны быть приняты в данном микропроцессоре, причем всегда лишь в том случае, если там обнаруживается кодовый маркер, соответствующий идентификатор и относящиеся к нему переданные рабочие параметры принимаются, запоминаются и обрабатываются, а в операторском терминале в его диалоговом состоянии, достигаемом согласно программе путем воздействия на клавиатуру управления и(или) на многопозиционный переключатель, рабочие параметры, принятые в операторский терминал в текущем режиме, каждый раз в зависимости от их идентификатора трансформируются в аналоговые пиктограммы, в цифровое изображение и(или) в текстовое изображение и каждый раз вводятся и запоминаются по состоянию на данный момент по меньшей мере в одном изобразительном поле маски экрана, соответствующей данному диалоговому состоянию, а постоянно актуализируемое содержание накопителя изображения отображается на дисплее.
В предпочтительном исполнении новый способ фильтрации на приемлемость требует только обращения запоминающего устройства в поле кодовых маркеров, выполненное в виде таблицы, в которой кодовые маркеры доступных индикаторов размещены в виде битов. Если таблица с 2048 битами из соображений экономии места построена с двухмерным расположением, то для проверки идентификации требуется адресование к таблице с длиной адреса восемь битов и обращение тремя битами по принципу "один из восьми", а также операция сравнения обоих результатов. Эти три рабочих этапа выполняются параллельно дальнейшему приему информации, в связи с чем накопленная в буфере информация, если она предназначена для микропроцессора, после уточнения может быть принята приемным буфером практически без потерь времени, т.е. в режиме реального времени, и тотчас же обработана.
Благодаря этому на экране дисплея с процессорным управлением можно осуществить индикацию текущих рабочих параметров. Особенно важное преимущество заключается в том, что указанные такие средства индикации согласованы с соответствующим родом работ, и при этом, однако, всегда остается одинаковая основная структура изобразительной маски для того, чтобы оператор осуществлял по возможности меньше трансформирующих мыслительных операций и мог ассоциировать определенные места экрана с определенными состояниями рабочего процесса, что способствует безопасности и надежности контроля.
Благодаря повышению эффективности передачи информации можно также придать приоритет аварийным и срочным сообщениям, адресуемым оператору и выводимым на экран. Только актуальная информация, на которую необходимо реагировать, находится в поле зрения оператора, наблюдение за отдельными важными узлами происходит автоматически и не выносится для показа. В кабине водителя на экране появляются только те данные, на которые оператор должен повлиять в зависимости от местности и состояния урожая. К их числу относится скорость движения, направление движения, а тем самым и ширина захвата, высота и наклон режущего аппарата. Всеми этими функциями оператор управляет одной рукой на рукоятке, которая снабжена четырьмя кнопками для регулирования режущего аппарата. Управление движением производится на основании заданных значений, которые постоянно переносятся на соответствующие процессоры. Для упрощения регулировки режущего аппарата предусмотрена специальная программа, которая позволяет при помощи кнопок на рукоятке немедленно выбрать из памяти заданные значения и различную программу регулирования, а также изменять заданные значения в случае необходимости.
В предпочтительном исполнении предусмотрено введение заданных значений вне меню предварительного выбора или вместо него при помощи многопозиционного переключателя, причем в соответствии с положением переключателя каждый раз надлежащая часть программы устанавливает передаточную связь с выбранным агрегатом и выводит соответствующую пиктограмму, причем каждый раз в результате воздействия в одном или другом направлении на (+/-) кнопку, в качестве которой предпочтительно применять перекидной выключатель, соответственно возрастает или уменьшается заданное значение в некотором диапазоне между допустимыми пределами.
Предпочтительно при непосредственном выборе заданного значения каждый раз положение курсора и состояние меню относительно отображения движения и жатвы заносится в память системы и при возврате в режим меню путем соответствующего перемещения многопозиционного переключателя снова вводится в действие и показывается на экране.
Многопозиционный переключатель предпочтительно выполнен в виде поворотного переключателя, среднее положение которого предусмотрено для работы в режиме меню, а другие положения относятся к предварительному выбору заданных значений. К их числу относятся заданная частота вращения молотильного барабана, заданная частота вращения вентилятора, заданное расстояние до деки молотильного барабана, заданная чувствительность датчика потерь в решете, заданная чувствительность датчика потерь в соломотрясе, заданная частота вращения мотовила, заданная ширина нижнего решета, заданная ширина верхнего решета и(или) заданная частота вращения наклонного транспортера.
Соответствующее выбранное заданное значение запрашивается каждый раз из соответствующей памяти заданных значений в соответствующем микропроцессоре и выводится для показа, при задании соответствующего приращения это значение изменяется в памяти заданных значений и выводится для показа. Аналогично измененное в результате последующей регулировки фактическое значение в текущем режиме выводится для показа, благодаря чему обеспечивается полный контроль функции. Кроме того, постоянно работает программа контроля, которая вырабатывает предупредительный сигнал, когда фактическое значение не соответствует заданному или когда происходит длительное регулирование настроечного органа или оно совсем не происходит. Показ, квитирование или запоминание предупредительного сигнала происходят так же, как для частей программы с управлением от меню.
Предпочтительные варианты осуществления приведены в дополнительных пунктах формулы изобретения в последующем описании, иллюстрируемом чертежами, на которых показано следующее.
Фиг. 1 - схема фильтрации на приемлемость информации.
Фиг. 2 - схематичное представление зерноуборочного комбайна с мультипроцессорной сетью и с увеличенными ее фрагментами.
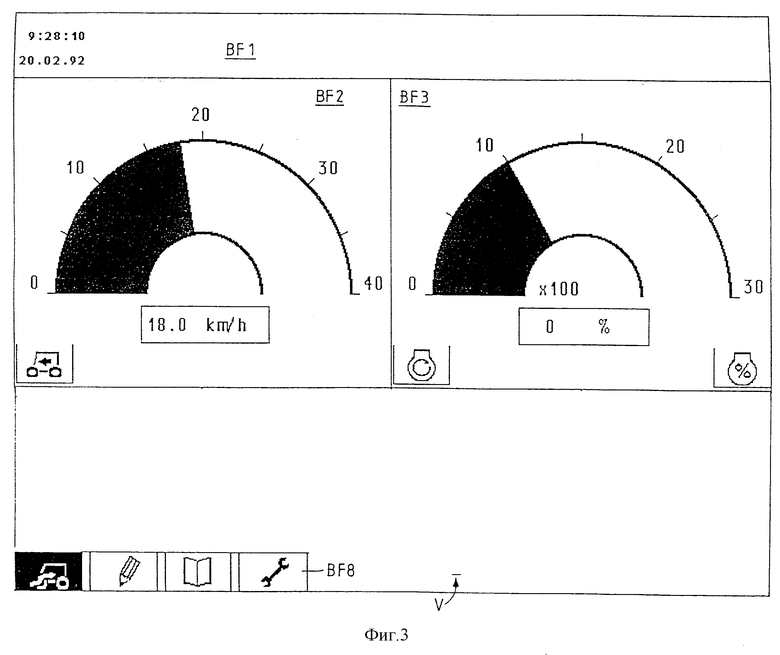
Фиг. 3 - маска изображения параметров движения.
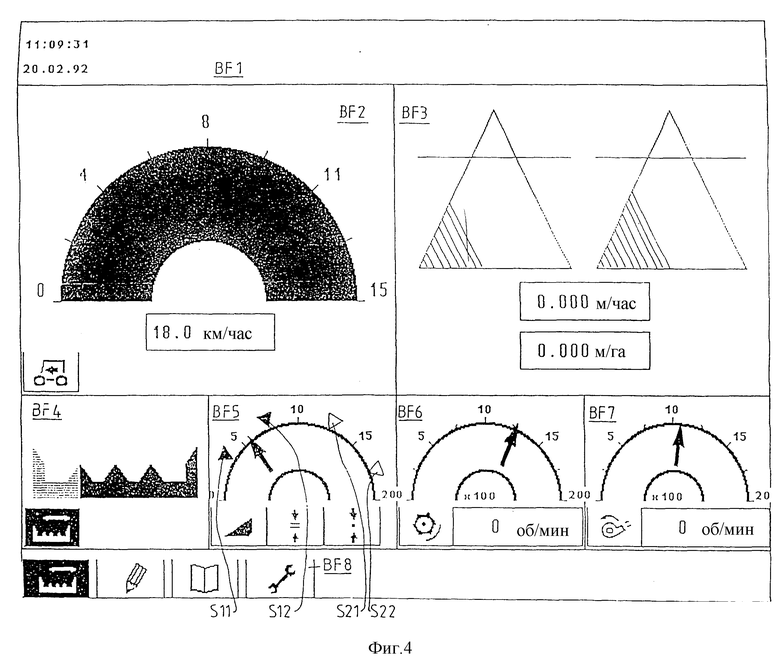
Фиг. 4 - маска изображения параметров жатвы.
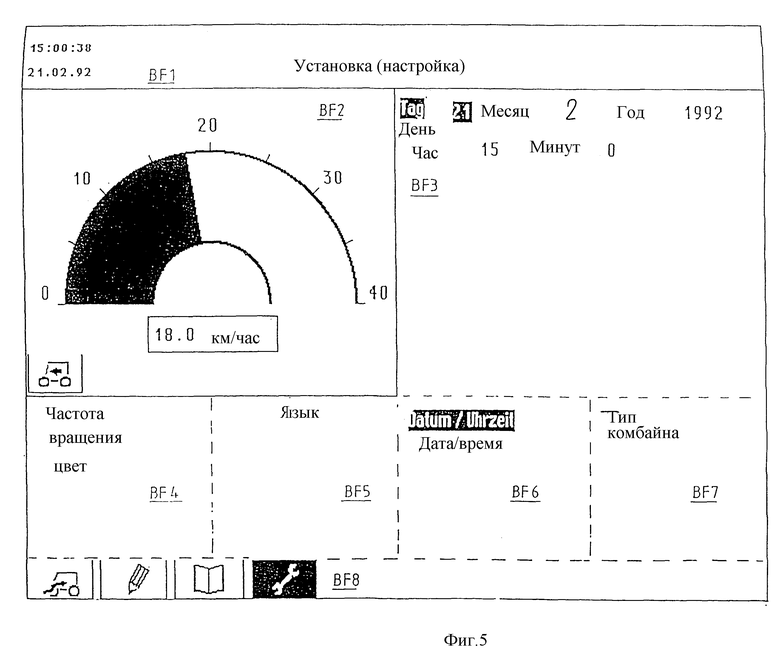
Фиг. 5 - маска установки параметров.
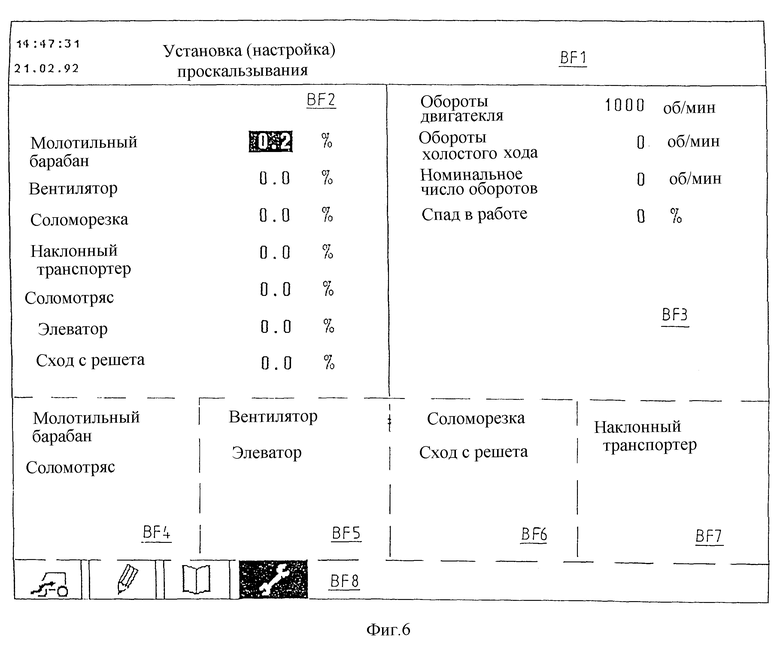
Фиг. 6 - маска установки параметров для предварительного выбора предельного проскальзывания.
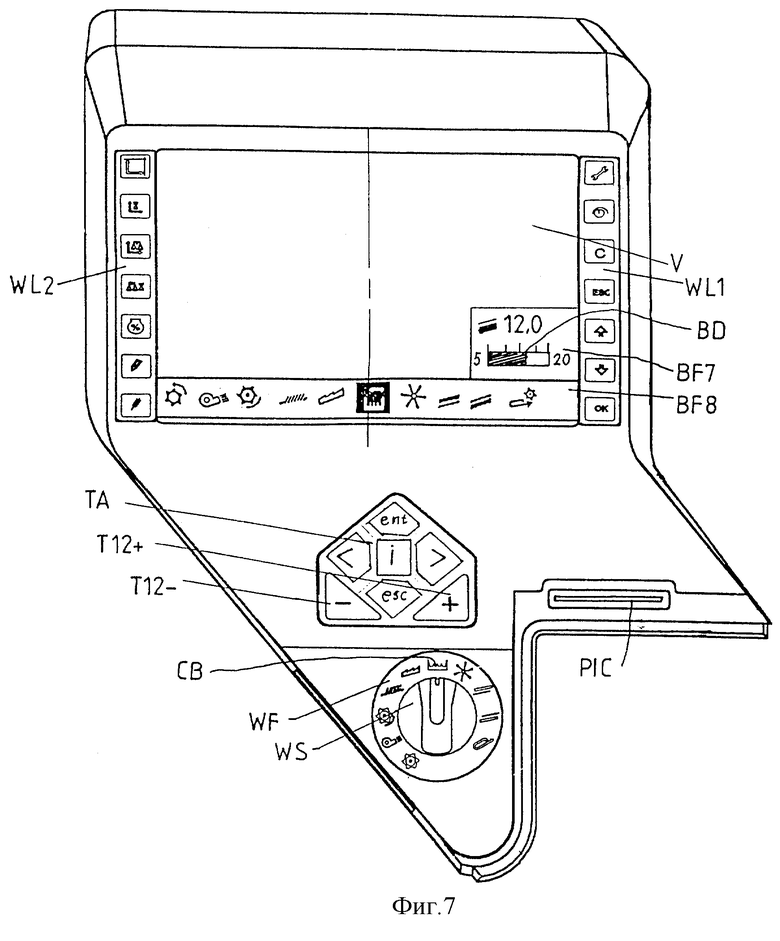
Фиг. 7 - внешний вид дисплея с органами управления.
На фиг. 1 схематически изображен принцип фильтрации на приемлемость информации (ID, MES), которая получена от одного из микропроцессоров. Из шины (B) информация через приемную цепь (ES), осуществляющую преобразование уровня и синхронизацию, последовательно записывается в буферное запоминающее устройство, которое состоит из идентификаторного участка, принимающего идентификатор (ID), и участка рабочих параметров, который принимает рабочие параметры (MES). Когда приемная цепь (ES) выдает полный сигнал идентификатора (IDC), идентификатор (ID) адресуется первым 11-битовым участком идентификатора (ID1) в идентификаторное запоминающее устройство (ТВ), содержащее 256 байтов, вследствие чего на его выходе появляется однобайтовое слово, подводимое к восьмикратной логической схеме И (UG), которая со своей стороны декодируется в схему "один из восьми", для этого может служить таблица (DES), к которой подводятся три бита второго идентификаторного участка (ID2) и выходные сигналы которого собираются в логической функции ИЛИ (OG), которая на выходе направляет дальнейшее прохождение идентификатора (ID) и информации о рабочих параметрах (MES) в промежуточное запоминающее устройство (FIFO) операторского терминала (MI), в результате чего вскоре информация о рабочих параметрах (MES) оказывается полностью принятой, о чем приемная цепь (ES) извещает сигналом комплектности информации (MESC).
Функции, изображенные в виде аппаратных средств, предпочтительно выполняются в значительной мере программными средствами в микропроцессоре, причем комплектные сообщения (IDC, MESC) служат для синхронизации буферного запоминающего устройства и программы. Перенос содержания буфера целесообразно производить, как в известных цепях подключения интерфейсов, каждый раз серийно байтами, что не показано.
На фиг. 2 показана общая схема зерноуборочного комбайна с сетью микропроцессоров и шиной (B). В кабине водителя 1 установлен терминал (MI), а на режущем аппарате 2 для управления и регулирования этого аппарата - второй микропроцессор (M2), на приводной и ходовой части 3 - третий микропроцессор (M3), на молотильном барабане 4 - четвертый микропроцессор (M4), а на транспортном и очистительном агрегате - пятый микропроцессор (MN), который контролирует поток зерна. Каждый микропроцессор (MI-MN) подключен через цепь связи с интерфейсами (SS) к центральной информационной шине (B). Терминал (MI) посылает информацию в дисплей (V) и получает управляющие импульсы через клавиатуру управления (TA) с семью клавишами (T9-T14) для управления в диалоговом режиме, а также эргономически при помощи кнопок управления режущим аппаратом (T15-T18), расположенных на рукоятке управления (F).
На изобразительных полях экрана расположены индикаторы времени и даты (BF1), индикатор скорости движения (BF2), индикатор потерь зерна и мощности уборки (BF3), индикатор рабочей ширины (частичной ширины) (BF4), шкала высоты среза с указанием заданного значения высоты среза (BF5), индикатор частоты вращения молотильного барабана (BF6), индикатор частоты вращения вентилятора (BF7) и перечень выбора главного меню (BF8). В клавиатуре управления (TA) имеется клавиша подтверждения (T9) для открывания меню, подтверждения установленного значения и для старта и остановки вводимых данных, курсорная клавиша "Вправо" (T10), курсорная клавиша "Влево" (T11) для выбора пунктов меню (из первого пункта меню клавишей "Влево" вызывается переход в последний пункт и наоборот), перекидная +/- клавиша (T12) для перестановки значений, клавиша возврата (T13) в ближайшую более высокую ступень меню и вспомогательная клавиша (T14) для вызова пояснительного текста к включенному пункту меню. Повторное нажатие этой вспомогательной клавиши приводит обратно в пункт меню. Если клавиши держать нажатыми в течение длительного времени, автоматически многократно повторяются функции, вызываемые ими. На рукоятке управления (F) находятся кнопка подъемника режущего аппарата (T15), кнопка опускания режущего аппарата (T16), кнопка включения автоматики предварительного выбора высоты срезания (T17) и кнопка включения автоматики контура (T18).
На экране дисплея (V) находятся восемь изобразительных полей (BF1-EF8), на которых изображаются пиктограммы (P1) для аналогового отображения рабочих параметров, числовых значений (ZI) для цифровой выдачи данных, а в других рабочих состояниях - текстовых указаний.
Изобразительные поля индикаторов времени (BF1) и выбора меню (BF8) имеют всегда одинаковый вид, причем время и дата всегда показываются устройством электронного отсчета времени в их значениях на текущий момент, а индикатор меню зависит от воздействия на клавиши управления (TA), причем индикаторные символы главного меню изображаются в текущий момент времени сплошными, а в остальном прозрачно.
В других полях экрана (BF2-BF7) изображается различная рабочая информация соответственно конкретному пункту меню. Исходным пунктом является всегда изображение параметров движения машины (фиг. 3), на котором в левом большом поле (BF2) изображен тахометр, а в правом большом поле (BF3) - индикатор рабочей нагрузки.
Из этого пункта меню можно путем первого клавишного ввода перейти на изображение жатвы (фиг. 4), где опять слева изображается тахометр, а в правом большом поле (BF3) двумя треугольными пиктограммами в текущем режиме изображается потеря зерен и производительность уборки. На меньших полях (BF4-BF7) внизу представлены и оцифрованы имеющиеся в данное время ширина захвата, выбранная высота срезания, частота вращения молотильного барабана, частота вращения вентилятора и частота вращения двигателя с уровнем его загрузки.
Из изображения параметров движения машины (фиг. 3) и жатвы (фиг. 4) можно, воздействуя на другие клавиши, иерархически переходить в подменю следующим образом:
Главное меню
Изображение параметров движения - Изображение жатвы
Изображение жатвы - Частичная ширина вкл/выкл
Настройка - Настройка
Регистрация - Регистрация
Руководство по применению - Руководство по применению
Сервис - Сервис
Подменю
Настройка - Руководство при применении
Настроить квантиметр - Основная настройка
Настроить режущий аппарат - Помощь настройке
Настроить контрольный прибор частоты вращения - Проблемы и решения
Настроить системные данные - Системные данные
Регистрация - Обслуживание
Регистрировать машинные данные - Сервис машины
Регистрировать данные в памяти - Контрольный список
Регистрировать данные заказа - Указания по безопасности
Подменю расчленяется дальше, как это видно из следующей таблицы для настройки.
Настройка
- Настроить системные данные
- Настроить индикатор частоты вращения
- Настроить язык
- Настроить дату и время
- Настроить тип зерноуборочного комбайна
- Настроить бортовой информатор
- Ширина режущего аппарата
- Рабочее положение
- Дистанционный фактор тарировочной езды
- Прямая настройка дистанционного фактора
- Запомнить собственную настройку дистанционного фактора
- Настроить контрольный прибор частоты вращения
- Настроить частоту вращения
- Настроить допустимый уровень рабочего перепада
- Настроить допустимое проскальзывание
- Настроить контур
- Настроить концевые упоры
- Настроить соотношение "клавиша/пружина"
- Настроить количество заданных значений
- Настроить заданные значения
- Настроить квантиметр
- Корректировочный расчет коэффициента производительности
- Список предложений по коэффициенту производительности
- Ввести в память собственную настройку коэффициента производительности.
В качестве примера на фиг. 5 показано изображение в пункте меню "Настроить системные данные, дату и время". Пункт меню указан нормальным текстом негативной записью в шестом изобразительном поле (BF6), а настроенная в данный момент дата - негативной записью - нормальным текстом "День" в третьем поле (BF3).
На изображения нормальных рабочих параметров накладываются дополнительно сигналы предупреждения и важные сообщения в варьируемых полях (BF2-BF7).
Сигналы предупреждения являются особой формой сообщений, которые пользуются повышенным приоритетом. Они создают оптический или акустический сигнал, который должен квитироваться оператором. Оптический сигнал, состоящий из символа и разъяснительного текста, накладывается на текущее содержание экрана. После квитирования предупреждение остается только в виде сообщения.
Определены следующие предупредительные сообщения:
- Контроль частоты вращения. Проскальзывание выходит за заданный порог:
- в молотильном барабане, - в вентиляторе, - в соломотрясе,
- в наклонном транспортере, - в сходе с решета,
- в соломорезке.
- Предупредительное сообщение текущей диагностики:
- неполадка в модульной аппаратуре,
- неполадка в модульной сенсорике,
- неполадка в модульной исполнительной цепи.
Сообщения изображаются в виде оптического символа в четвертом или пятом поле (BF4-BF7). Каждый символ сообщения показывается в определенном месте. Дополнительно следует короткий звуковой сигнал.
Установлены следующие сообщения:
- Необходимо обслуживание (10 ч, 50 ч, 100 ч, 500 ч)
- Соломотряска ВКЛ
- Статус автоконтура
- Пониженное напряжение
- Перенапряжение
Для того чтобы обеспечить быстрое и простое управление приоритетом информации, которая поступает в информационную шину, идентификаторы разделены на три класса, определяемые их разрядом, как видно из приведенного ниже. Путем простой проверки положения соответствующего разряда после принятия какого-либо сообщения при положительном результате проверки на приемлемость определяется приоритет и в соответствии с ним полученное сообщение оценивается или вводится в определенную очередь. Этим обеспечивается немедленное формирование сообщений о критических состояниях.
Ступени приоритета: бин
Системные указания - 000
Предупредительные сообщения - 001
Заданные значения - 010
Фактические значения - 011
Извещения - 110
Диагностика - 111
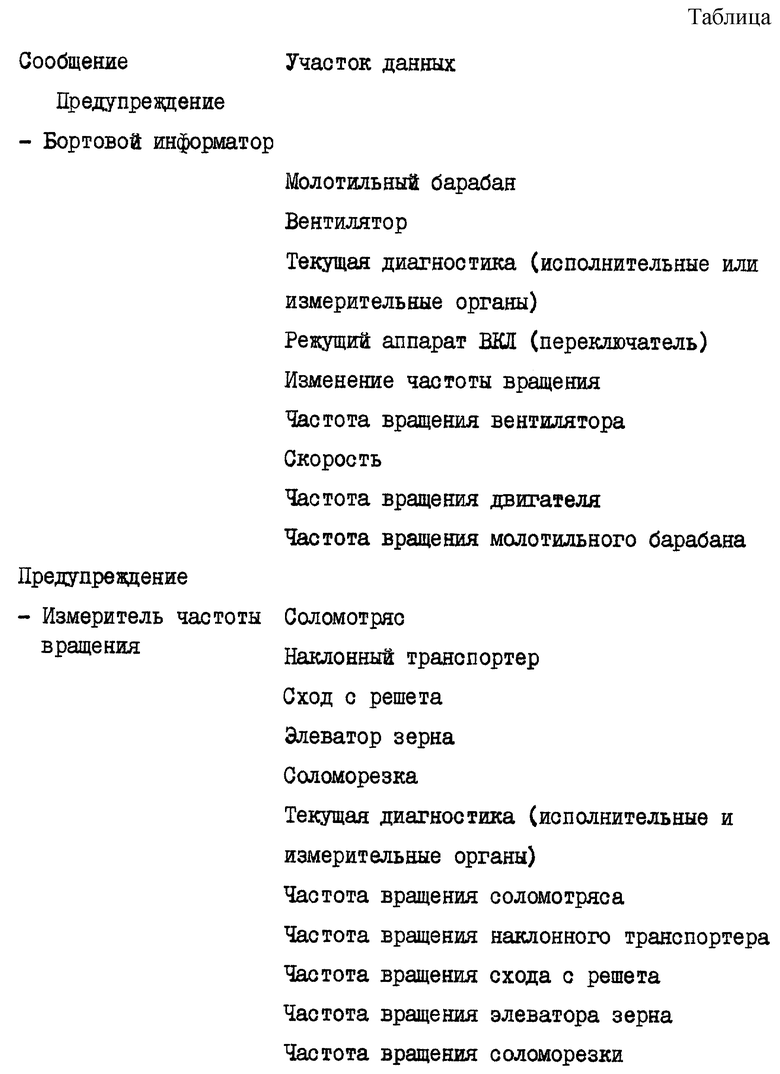
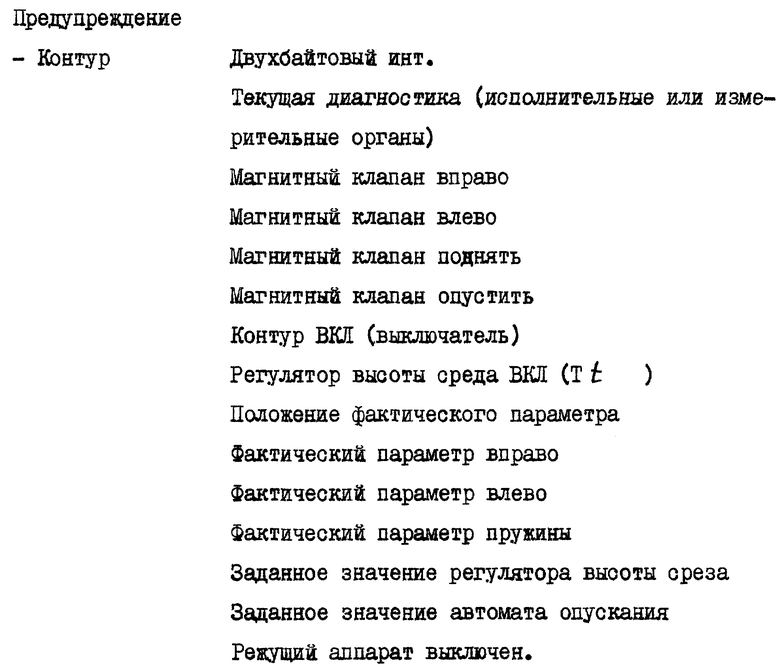
В приведенной в конце описания таблице представлены некоторые предупредительные сообщения.
Наблюдение за частотой вращения происходит, когда режущий агрегат опущен и включен и достигнута минимальная рабочая частота вращения двигателя. После этого оценивается частота вращения отдельных приводимых во вращение клиновыми ремнями валов по отношению к частоте вращения двигателя в сравнении с отношением частот вращения на холостом ходу и проверяется, не вышло ли за заданные пределы проскальзывание. В более узком смысле слова речь идет о наблюдении за проскальзыванием. Если проскальзывание превышает допустимую величину, то дается соответствующий сигнал предупреждения, индицируемый с наивысшим приоритетом. После квитирования предупреждения путем соответствующего воздействия на клавишу подтверждения (T9) сообщение остается в изобразительном поле, но дальнейшему появлению предупредительных сообщений и постоянному нагружению информационной линии препятствует то, что граница допустимого проскальзывания повышается путем приращений, для чего в соответствующий процессор контроля (M4) дается сообщение о приращении настройки, и процессор обрабатывает его. Кроме того, соответствующее сообщение вносится в запоминающее устройство для указаний по обслуживанию, где оно гасится после осуществления обслуживания, причем снова задается допустимое проскальзывание. Возникающее при этом разделение экрана изображено на фиг. 6 для пункта меню, относящегося к регламентации проскальзывания молотильного барабана.
Для синхронизации отдельных измерений частоты вращения с частотой вращения двигателя последнюю периодически (целесообразно через каждую секунду) переносят на другие участки цепи.
Далее через короткие промежутки времени переносят скорость движения и состояние включения или выключения режущего аппарата.
Затем терминал (M1) периодически обменивается с предназначенным для контроля за частотой вращения микропроцессором (M3) привода и шасси следующими сообщениями:
в режиме приема:
- - частичная ширина 1/1-1/4 - - рабочая ширина - - статический радиус x передаточное отношение - - верхняя частота вращения двигателя на холостом ходу - - частота вращения двигателя под полной нагрузкой - - минимальная рабочая частота вращения - - допустимое проскальзывание
в режиме выдачи:
- - обработанная площадь - - производительность на площади - - пройденный путь - - рабочее время - - часы работы - - напряжение в бортовой сети - - уровень загрузки двигателя - - частота вращения вентилятора - - частота вращения молотильного барабана.
Последние данные служат прежде всего для выдачи информации об уборке и расчетах, а также для составления отчета об уборке зерна с целью корреляции данных о прохождении уборки, которые определяет и периодически высылает, а также запоминает для выдачи текущих и итоговых данных микропроцессор транспортировки и очистки (MN).
Обмен информацией с коротким временем реакции происходит, в частности, между терминалом (M1) и процессором регулятора режущего аппарата (M2), так как сигналы управляющих клавиш (T15-T18) на рукоятке управления (F) без задержки должны быть преобразованы в управляющие реакции для регулирования высоты и наклона режущего аппарата, так как они предназначены для оптимального охвата разных по высоте и(или) наклону или полегших хлебов и во избежание повреждения режущего аппарата камнями или выступами почвы, а также во избежание перегрузки транспортера при заданной в данном случае скорости движения и ширине среза, которые определены продольным или поперечным наклоном на рукоятке управления (F).
Для обмена информацией в процессоре режущего аппарата (M2) предусмотрены прежде всего следующие периодические сообщения.
В режиме приема:
- скорость,
- изменение высоты среза положительными или отрицательными приращениями,
- заданные значения для обоих автоматов опускания,
- заданные значения для регулятора высоты среза.
В режиме передачи:
- фактические значения автоматов опускания,
- фактические значения правого и левого датчика контакта с почвой,
- контурная автоматика включена-выключена,
- настроечные значения автоматов опускания включены-выключены,
- настроечные значения регулятора высоты среза включены-выключены.
Кроме того, с приоритетом высылаются сигналы тревоги, которые свидетельствуют о переходе фактических значений за заданные пределы, а также о неполадках в настроечных узлах и магнитных клапанах гидравлических устройств для изменения высоты и наклона.
Фактические значения образованы из давления на опору (измеряется в пружине режущего аппарата) и расстояния до почвы (измеряется под ощупывающей скобой). Благодаря этому водитель имеет возможность ступенчато регулировать давление на опору и расстояние режущего аппарата от почвы.
Для того чтобы режущий аппарат передвигался параллельно почве, а высота среза была постоянной по всей ширине режущего аппарата, кроме регулирования высоты имеется еще система поперечного регулирования. Эта система сравнивает расстояние до почвы слева и справа, и при наличии отклонения посылает корректировочные сигналы в гидравлическое устройство.
Устройство для автоматического опускания дает водителю возможность выбрать высоту среза например выше 100 мм. Выбранная высота автоматически настраивается. Водитель может во время движения переключать программу автоматического опускания на программу регулирования высоты среза и благодаря этому при нажатии клавиши получать различные высоты среза. Управление этими переключениями функции производится главным образом при помощи кнопок-клавиш на многопозиционной рукоятке (F). Верхняя кнопка (T17) служит для поднятия режущего агрегата из находящейся вблизи почвы зоны автоматической настройки контура в более удаленную от почвы зону высоты среза. Нижняя кнопка (T18) служит для опускания режущего аппарата в положениe автоматической настройки контура, которое может находиться или в зоне заранее задаваемой высоты среза или в зоне заранее задаваемого регулирования высоты среза. Это определяется только при принятии каждый раз соответствующего заданного значения.
Предусмотрены два вида ввода заданного значения. При первом способе заданное значение можно изменить при помощи перекидной (+/-) кнопки (T12) в клавиатуре (TA). Это изменение заданного значения может быть настроено в рабочем меню. Система поддерживает этот ввод тем, что курсор каждый раз в соответствии с автоматикой находится в положении, которое было выбрано кнопкой на многопозиционной рукоятке (F). Заданное значение регулируется приращениями небольшого шага (2,5%). Время исполнения - менее одной секунды. Для этого терминал посылает сообщение "Увеличение" или "Уменьшение" в процессор режущего аппарата (M2), который в свою очередь отвечает новым заданным значением. Таким образом, пересчет нового заданного значения осуществляется централизованным образом в одном месте. Предварительная настройка заданных значений (S11, S12, S21, S22) (фиг. 4) возможна, кроме того, в подменю "Настроить контур".
Второй способ дает водителю возможность принять в качестве нового заданного значения фактическое значение в данный момент. Для этого режущий аппарат при помощи кнопок (T15, T16) для подъема и опускания приводится в желательное положение, после чего путем длительного нажатия (свыше трех секунд) соответствующей кнопки автоматики (T17, T18) фактическое значение принимается в качестве нового заданного значения. Кратковременное же нажатие на переключатель приводит к опусканию режущего аппарата в положение автоматики, определенное другим заданным значением, причем настроенное заданное значение при этом не изменяется. Решение о том, следует ли продолжать двигаться с прежним заданным значением или надо принять в качестве нового заданного значения фактическое значение, выносится каждый раз только после отпускания выключателя. Оператору предоставляется возможность вводить два заданных значения (S11-S22) (фиг. 4), сохраняя изобразительное поле (BF5) для каждой из двух областей регулирования. Посредством меню "Настроить контур" водитель может выбрать, хочет ли он работать с одним или с двумя заданными значениями. Если в память введены два заданных значения, то можно путем нажатия клавиши выбрать одно из них. Это бывает целесообразно, когда убираемое зерно частично стоит и частично полегло или сильно наклонено. Настройка каждый раз с одним заданным значением (S11, S21) производится при включении системы. Если выбраны два заданных значения, то показываются также два заданных значения (S11, S12, S21, S22), которые сначала различаются на стандартную величину.
При воздействии на одну из кнопок автоматики (T15-T18) происходит переключение с одного заданного значения на другое. Если соответствующая автоматика была выключена, то в качестве первого исходного значения принимается прежнее заданное значение. При массивном контакте режущего аппарата с почвой, когда одна из ощупывающих скоб отжата не менее чем на 85%, происходит автоматическое экстренное поднятие, т.е. выход за хранящееся в памяти заданное значение, и посылается предупредительный сигнал.
Как и в регуляторе ширины среза, регулятор контура работает в качестве регулятора поперечного наклона с соответствующими заданными значениями и датчиками контакта с почвой, благодаря чему вблизи почвы обеспечивается параллельное расположение режущего аппарата. Поперечное регулирование действует практически всегда. Его точность регулирования ("мертвая зона") при малых отжимах ощупывающей скобы режущего аппарата, когда фактическое значение находится в верхней трети, составляет 6%, а при больших отжатиях 15%. Если отклонение фактического значения от заданного превышает 20%, то включаются соответствующие магнитные клапаны с относительной продолжительностью включения ED = 100%. Если указанное отклонение меньше 20% и больше 5%, то соответствующие магнитные клапаны включаются импульсами в секундном ритме с ED = 10%. При отклонении менее 5% магнитные клапаны отключаются. Для увеличения чувствительности предварительного выбора заданного значения сразу после изменения заданного значения уже при разнице между фактическим и заданным значениями 2,5% вводится в действие соответствующий магнитный клапан для выравнивания.
Подобно тому как для регулирования режущего аппарата задаются стандартные настроечные величины, т.е. заданные и предельные значения, относительно которых при внешних условиях, отличающихся от нормы, оператор может задать некоторое изменение, это предусмотрено и для других узлов комбайна. Для измерения выработки и потерь и соответствующих расчетов при разных видах уборки зерна каждый раз вводятся в память стандартные значения удельного веса при среднем качестве и средней влажности, в связи с чем после включения надо выбрать согласно меню тот или иной вид уборки зерна. Кроме того, периодически можно вводить найденные вне системы данные об удельном весе, если в машине нет автоматического взвешивания. Эти данные переносятся в микропроцессор измерения выработки и потерь (MN) и используются там для оценки результатов измерения, которые в текущем режиме переносятся в операторский терминал (M1), и там вносятся в пиктограмму изобразительного поля (BF3) для текущего показа в изображении жатвы и в память для расшифровки и последующего показа на принтере или в кассете (C). В устройство для измерения потерь зерна для корреляции измеренных сигналов надо тоже ввести вид уборки зерна, для каждого из которых в памяти хранятся соответствующие характерные показатели.
Если имеет место потеря зерна, которая несмотря на регулировочные мероприятия по оптимизации превышает заданное предельное значение, то дается предупредительный сигнал. Благодаря весьма наглядному изображению потерь в соломотрясе в левом треугольнике и потерь в решете в правом треугольнике изобразительного поля (BF3) маски изображения жатвы (фиг. 4) оператор постоянно имеет в поле зрения эти важные критерии работы и может постоянно производить дальнейшую оптимизацию путем надлежащего выбора ширины среза, настройки скорости движения, высоты среза, а в случае необходимости и регулировки решета и вентилятора.
Эргономически целесообразное расположение рукоятки управления (F) в зоне доступности правой руки и клавиатуры (TA) перед правой рукой обеспечивает в текущем режиме легкий доступ к накопленной информации и ввод новых заданных значений рабочих параметров.
Переработка поступающей информации в операторском терминале (M1) в отдельные изобразительные поля происходит в двух разных программных плоскостях. Сначала поступающие сообщения обрабатываются в базовой программной плоскости с прерывистым управлением следующим образом.
- Если согласно идентификатору возникает ситуация тревоги, соответствующее сообщение принимается из буфера и вводится в отметчик тревоги, устанавливается принадлежность сообщения соответствующему полю тревоги (BF3), оно отмечается в запоминающем устройстве контроля полей изображений, включается звуковой сигнал, и идентификатор сбрасывается.
- Если ситуации тревоги нет, а имеет место лишь некоторое извещение, то извещение, соответствующее данному сообщению, отмечается в контрольном поле области полей извещений (BF4), выдается короткий звуковой сигнал, и идентификатор сбрасывается.
- Если нет ни тревожной ситуации, ни извещения, и передано новое значение для индикации, то переменное сообщение вносится в запоминающее устройство контроля полей изображений, соответствующее данному индицируемому значению, а идентификатор сбрасывается.
Дальнейшая обработка информации в запоминающем устройстве контроля полей изображений происходит периодически в базовой программе обслуживания. В ней в запоминающем устройстве изображений собираются и(или) актуализируются отдельные элементы содержания полей экрана в зависимости от статусной информации в запоминающих устройствах контроля полей изображений.
- Если имеет место переход к статусу "Молотильный барабан включен", то подготовляется изображение параметров жатвы (фиг. 4), а если появляется новый статус "Молотильный барабан выключен", то выстраивается изображение параметров движения (фиг. 3).
- Если изменено состояние органов управления (T11-T18), то в соответствии c этим приводится в соответствие с данным моментом запоминающее устройство статусов меню, и снабжаются соответствующими данными или сбрасываются соответствующие запоминающие устройства статуса полей изображений.
- Если путем воздействия на клавиши подтверждается ситуация тревоги, то в соответствующей зоне статуса изобразительного поля сбрасывается статус ситуации тревоги в поле изображения тревоги (BF3), и звуковой сигнал выключается.
- После этого новые введенные данные, содержащиеся в отдельных запоминающих устройствах статуса полей изображений, управляемые в иерархическом порядке по отношению к данным о ситуации тревоги, сообщения и общая рабочая информация, как, например, новые фактические и заданные значения и изменения статуса меню, расшифровываются для управления изменением содержания запоминающих устройств изображений, благодаря чему содержание изображений полностью приводится в соответствие с данным моментом.
На фиг. 7 показан экран дисплея (V) с пиктограммным бордюром, который предпочтительно примыкает и вводится в действие в нижней зоне поля (BF8), когда многопозиционный переключатель (WS), выполненный в виде поворотного переключателя или клавиатуры (TA), приводится в положение предварительного выбора заданных значений. Среднее положение (CB) многопозиционного переключателя (WS) служит для выбора нормального режима движения и уборки зерна с выбором меню. Отдельные пиктограммы относятся к выбору настраиваемых заданных значений: заданная частота вращения молотильного барабана, заданная частота вращения вентилятора, заданное расстояние деки молотильного барабана, заданная чувствительность каждого датчика потерь в решете, заданная чувствительность датчика потерь в соломотрясе, заданная частота вращения мотовила, заданная ширина нижнего решета, заданная ширина верхнего решета и(или) заданная частота вращения наклонного транспортера. Символы находятся на многофункциональном переключателе (WS) в виде поля выбора (WF). Заданные значения частоты вращения воздействуют на настроечный орган регулируемой клиноременной передачи. Заданные значения ширины решет воздействуют на орган настройки ширины решета. Заданные значения чувствительности воздействуют на степень усиления и(или) на предельно допустимое значение измерительного усилителя датчиков потерь.
Фактическое значение, выдаваемое каждый раз запрошенным средством настройки, или заданное значение, содержащееся в запоминающем устройстве заданных значений, показывается в другом поле экрана (BF7) в цифровом выражении, а также в виде блочного графика (BD) между обоими предельными заданными значениями. Кроме того, предельные значения указаны на концах блочного графика (BD), который снабжен шкалой.
В частичном изобразительном поле (BF7) показан также символ управляемого настроечного органа; на фиг. 7 показан случай, когда была бы выбрана ширина нижнего решета. Предусматривается, что в случае перерегулирования настроечного органа соответствующая пиктограмма становится отрицательной.
В этой связи возникающие сообщения о ситуации тревоги обрабатываются как в режиме меню и выносятся для изображения. Применение многопозиционного переключателя (WS) дает оператору в дополнение к управлению посредством меню простую возможность вводить заданные значения и оценивать фактические значения, влияя тем самым на различные функции и наблюдая за ними.
В другом исполнении системы обслуживания клавиатура (TA) оснащена только двумя перекидными выключателями (T12+, T12-), а для выбора меню предусмотрены два бордюра (WL1, WL2) с клавишами, которые снабжены пиктограммами для выбора главного меню и последующих включений и переключений. Предпочтительно оба бордюра (WL1 и WL2) следует располагать по обе стороны экрана. Вместо одного поворотного переключателя (WS) можно также предусмотреть один клавишный бордюр параллельно пиктограммному полю (BF8).
В качестве предохранительного устройства на панели управления предусматривается вводное устройство для персональной идентификационной карточки (PIC).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ КОМБАЙНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2152147C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО И УСТРОЙСТВО ОТОБРАЖЕНИЯ ДЛЯ НЕГО | 2010 |
|
RU2527759C2 |
| САМОХОДНЫЙ ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 1993 |
|
RU2073967C1 |
| Зерноуборочный комбайн | 1982 |
|
SU1582970A3 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЛОТИЛЬНОГО АППАРАТА ЗЕРНОУБОРОЧНОГО КОМБАЙНА И ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2004 |
|
RU2349074C2 |
| САМОХОДНАЯ СЕЛЬСКОХОЗЯЙСТВЕННАЯ РАБОЧАЯ МАШИНА | 2008 |
|
RU2477038C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ УБОРОЧНОЙ СЕЛЬХОЗМАШИНОЙ | 2006 |
|
RU2402191C2 |
| КОМБАЙН | 1990 |
|
RU2018222C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЦЕЛЕВОГО ЗНАЧЕНИЯ ПАРАМЕТРА УПРАВЛЕНИЯ РАБОЧЕГО АГРЕГАТА УБОРОЧНОЙ СЕЛЬХОЗМАШИНЫ, УСТРОЙСТВО УПРАВЛЕНИЯ РАБОЧИМ АГРЕГАТОМ И УБОРОЧНАЯ СЕЛЬХОЗМАШИНА | 2006 |
|
RU2403698C2 |
| СПОСОБ И КОНСТРУКЦИЯ ПРИВОДА УСТРОЙСТВА ТРАНСПОРТИРОВАНИЯ УБРАННОЙ МАССЫ | 2006 |
|
RU2404566C2 |

Сельскохозяйственная машина, преимущественно зерноуборочный комбайн, состоящая из ряда узлов (1-N) с приданными им микропроцессорами (М1-NM), из которых по меньшей мере один является операторским терминалом (МI) с клавиатурой управления (ТА) и дисплеем (V) и которые соединены измерительными и настроечными элементами соответствующих узлов (1-N) и обрабатывают поступающие в эти узлы (1-N) данные с целью управления и(или) регулирования или показа, причем эти микропроцессоры (М1-MN) связаны между собой при помощи стандартной информационной шины (В) через обычные цепи подключения интерфейсов (SS) и передают через них рабочие параметры вместе с конкретным идентификатором рабочих параметров, причем в отдельных процессорах (М1-MN) идентификаторы таких видов рабочих параметров, которые должны быть приняты, запоминаются в таблице двоичных чисел как единица, поступающий идентификатор получает доступ к двоичным разрядам таблицы и, если там в памяти хранится единица, идентификатор принимается вместе с относящимися к нему переносимыми рабочими параметрами. Технический результат - повышение эффективности информационного обмена между процессорами и оператором и как следствие физическая разгрузка оператора. 22 з.п. ф-лы, 1 табл., 7 ил.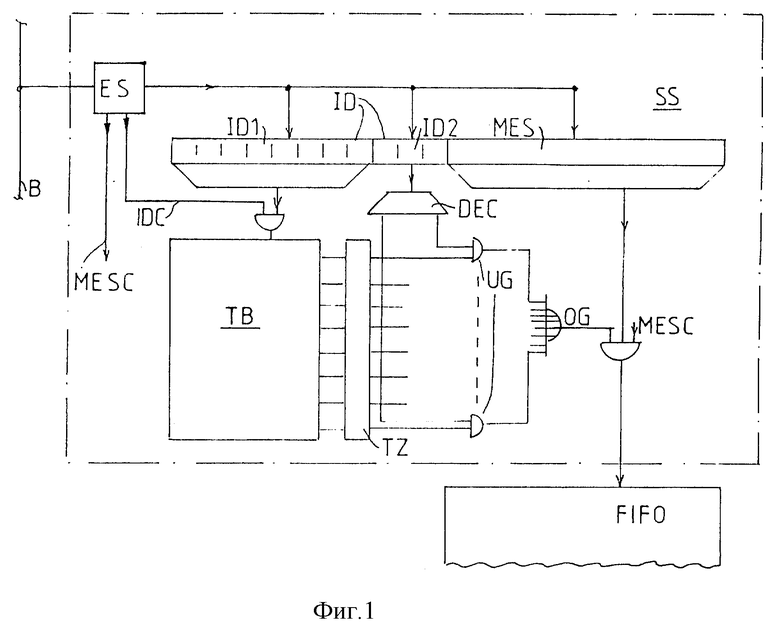
| LANDTECHNIK, N 47, VDI VERLAG, 1/2-92 Feb | |||
| Контрольный стрелочный замок | 1920 |
|
SU71A1 |
| Система автоматического управления | 1989 |
|
SU1735806A1 |
| US 4630191 A, 16.12.1986 | |||
| US 4376298 A, 08.03.1983 | |||
| US 4277833 A, 07.07.1981 | |||
| Устройство для управления робототехнологическим комплексом | 1989 |
|
SU1780080A1 |
| DE 3708324 A1, 22.09.1988. | |||
