Изобретение относится к технике связи, а конкретнее к радиотехническим системам передачи и приема радиосигналов и извлечения информации. К таким системам относятся, в частности, радионавигационные и радиолокационные системы, системы радиоразведки радиотехнических средств, радионаблюдения поверхности Земли и др. [Радиотехнические системы / Ю.М. Казаринов и др. Под ред. Ю.М. Казаринова. - М.: ИЦ «Академия», 2008, стр.7]. Заявляемая система содержит принимающие радиосигналы радиотехнические объекты, стационарные или подвижные, и наземную пунктовую передающую радиосигналы систему, включающую упорядоченно пронумерованные передающие радиосигналы пункты, в количестве не менее пяти, координаты фазовых центров антенн которых известны на принимающих радиосигналы радиотехнических объектах. Реализация системы позволит, в том числе, определить пространственные координаты указанных радиотехнических объектов, упростить соответствующие системы извлечения информации, увеличить их технико-экономическую эффективность с учетом всех компонентов, влияющих на стоимость и технические показатели.
Известные радиотехнические системы передачи и приема радиосигналов и извлечения информации используются, в том числе, для определения координат радиотехнических объектов и основаны на применении угломерных, дальномерных, разностно и суммарно-дальномерных и комбинированных методов определения местоположения объекта с амплитудными, временными, частотными, фазовыми и импульсно-фазовыми методами измерения параметров радиосигнала [Патенты РФ №№2018855, 2115137, 2258242, 2264598, 2309420, 2325666, 2363117, 2371737, 2378660; Основы испытаний летательных аппаратов / Е.И. Кринецкий и др. Под ред. Е.И. Кринецкого. - М.: Машиностр., 1979, с.64-89; Радиотехнические системы / Ю.М. Казаринов и др. Под ред. Ю.М. Казаринова. - М.: ИЦ «Академия», 2008, с.17-18, п.п.7.1-7.4, гл.10.; Мельников Ю.П., Попов С.В. Радиотехническая разведка. Методы оценки эффективности местоопределения источников излучения. - М.: «Радиотехника», 2008, гл.5]. Известные системы имеют те или иные недостатки, например необходимость механического перемещения антенной системы, невозможность однозначного определения координат объекта, необходимость априорной информации о местоположении объекта, необходимость общей синхронизации передающих и принимающих радиосигналы радиотехнических объектов, недостаточную надежность. По критерию минимальной достаточности наиболее близкой является система передачи и приема радиосигналов и извлечения информации по патенту RU №2453996.
Преимуществом заявляемой системы по сравнению с известными является возможность повышения технико-экономической эффективности радиотехнических комплексов измерения пространственных координат и других характеристик объекта, функционально связанных с его координатами, в том числе, обеспечение точности и достоверности их измерения в соответствии с современными требованиями. Это достигается тем, что заявляемая система, в частности, не требует общей синхронизации совокупности передающих и принимающих радиосигналы радиотехнических объектов. Также заявляемая система позволяет определять пространственные координаты посредством косвенного измерения с использованием простых выражений, зависящих от измеренных моментов времен приемов радиосигналов на принимающем радиосигналы радиотехническом объекте. Благодаря этому упрощается однозначное определение пространственных координат.
Для достижения указанного технического результата в соответствии с настоящим изобретением радиотехническая система содержит наземную пунктовую передающую радиосигналы систему и принимающие радиосигналы радиотехнические объекты, стационарные или подвижные, при этом указанная наземная пунктовая передающая радиосигналы система включает упорядоченно пронумерованные передающие радиосигналы пункты, в количестве N не менее пяти, каждый из них содержит антенные устройства, фазовые центры передающих антенн которых находятся в заданных, не расположенных в одной плоскости и известных, в том числе на упомянутых объектах, точках с координатами Xn, Yn, Zn, где индекс n изменяется от 1 до N, соответственно, в заданной трехмерной декартовой системе координат (X, Y, Z), и подсоединенные к антенным устройствам передающие радиосигналы устройства, выполненные с возможностью синхронизированной упорядоченной передачи радиосигналов сериями, преимущественно по одному радиосигналу из каждого передающего радиосигналы пункта в серии, с заданными не обязательно одинаковыми интервалами между сериями, при необходимости указанные передающие радиосигналы устройства выполнены с возможностью передачи радиосигналов с заданными индивидуальными признаками, в том числе сложных и составных радиосигналов с заданными индивидуальными признаками их элементов и возможностью их разделения при приеме, и при необходимости с заданными, не обязательно одинаковыми, и известными на упомянутых принимающих радиосигналы радиотехнических объектах задержками по времени между радиосигналами, а каждый принимающий радиосигналы радиотехнический объект содержит антенное устройство, подключенное к нему принимающее радиосигналы устройство, выполненное с возможностью приема радиосигналов наземной пунктовой передающей радиосигналы системы и их идентификации соответствующим передающим радиосигналы пунктам, регистратор моментов времен приема радиосигналов от упомянутых передающих радиосигналы пунктов в заданной на принимающем радиосигналы радиотехническом объекте системе отсчета времени, соединенный с принимающим радиосигналы устройством, и информационную систему, функционально связанную с регистратором и выполненную с возможностью хранения упомянутых заданных координат Xn, Yn, Zn, указанных заданных времен задержек, при необходимости, и с возможностью, при необходимости, центрирования указанных моментов времен приема радиосигналов, в том числе при необходимости с исключенными указанными временами задержек посредством исключения из каждого момента времени среднего значения всех моментов времен серии и определения таким образом зарегистрированных моментов времен tn, также указанная информационная система выполнена с возможностью измерения параметров dn с размерностью длины dn=υtn, где υ - скорость распространения радиосигнала, и через измеренные параметры dn и упомянутые координаты Xn, Yn, Zn измерения параметров ci, где индекс i изменяется от 0 до 6, параметров a j с размерностью длины в четвертой степени, где индекс j изменяется от 1 до 6, и параметров bk с размерностью длины в пятой степени, где индекс k изменяется от 1 до 3, в соответствии с уравнениями измерений
где параметр 


также при необходимости информационная система выполнена с возможностью сохранения измеренных в сериях указанных координат x, y, z, измерения через них других траекторных характеристик принимающего радиосигналы радиотехнического объекта, в том числе с использованием статистических методов траекторных измерений, при этом принимающий радиосигналы радиотехнический объект при необходимости содержит блок отображения и блок передачи информации потребителям, функционально связанные с указанной информационной системой, при этом наземная пунктовая передающая радиосигналы система при необходимости содержит блок приема и отображения информации, выполненный с возможностью приема информации, переданной указанным блоком передачи информации потребителям принимающего радиосигналы радиотехнического объекта, кроме того, при необходимости в наземную пунктовую передающую радиосигналы систему введен контрольный принимающий радиосигналы радиотехнический объект, выполненный с возможностью приема радиосигналов, передаваемых упомянутыми пунктами наземной пунктовой передающей радиосигналы системы, с заданными в указанной трехмерной декартовой системе координат (X, Y, Z) координатами фазового центра его антенны xк, yк, zк, составляющие элементы которого выполнены преимущественно идентично составляющим элементам упомянутого принимающего радиосигналы радиотехнического объекта, при этом информационная система упомянутого контрольного радиотехнического объекта выполнена дополнительно с возможностью коррекции указанных измеренных координат x, y, z по известным координатам xк, yк, zк и измеренным координатам xки, yки, zки фазового центра принимающей антенны контрольного принимающего радиосигналы радиотехнического объекта, также наземная пунктовая передающая радиосигналы система содержит подсистему управления ее работой.
В существующем уровне техники не выявлено источников информации, которые содержали бы сведения о системах того же назначения с указанной совокупностью признаков.
Ниже изобретение описано более детально со ссылками на фигуру.
На фигуре показана заявляемая система. Радиотехническая система 1 содержит наземную пунктовую передающую радиосигналы систему (ПС) 2 и принимающий радиосигналы (р/с) радиотехнический объект (РО) 3. При этом ПС 2 включает упорядоченно пронумерованные передающие р/с пункты 4 (№№1, 2, …, n, …, N) в количестве N не менее пяти. Каждый из них содержит антенные устройства 5, фазовые центры передающих антенн которых находятся в заданных, не расположенных в одной плоскости, и известных, в том числе на упомянутых объектах, точках с координатами Xn, Yn, Zn, где индекс n изменяется от 1 до N, соответственно, в заданной трехмерной декартовой системе координат (X, Y, Z). К антенным устройствам 5 подсоединены передающие радиосигналы устройства 6.
Устройства 6 выполнены с возможностью синхронизированной упорядоченной передачи р/с сериями, преимущественно по одному р/с из каждого передающего р/с пункта 4 в серии, и с заданными не обязательно одинаковыми интервалами между сериями. При необходимости устройства 6 выполнены с возможностью передачи р/с с заданными индивидуальными признаками, в том числе сложных и составных р/с с заданными индивидуальными признаками их элементов [Варакин Л.Е. Теория систем сигналов. М.: «Сов. радио», 1978, с.18] и возможностью их разделения при приеме. Также при необходимости устройства 6 выполнены с возможностью передачи р/с с заданными, не обязательно одинаковыми, и известными на упомянутых принимающих р/с РО 3 задержками по времени между р/с.
Каждый принимающий р/с РО 3 содержит антенное устройство 7 и подключенное к нему принимающее р/с устройство 8. Последнее выполнено с возможностью приема р/с наземной ПС 2 и их идентификации соответствующим передающим р/с пунктам 4. РО 3 содержит регистратор 9 моментов времен приема р/с от передающих р/с пунктов 4 в заданной на РО 3 системе отсчета времени. Регистратор 9 соединен с принимающим р/с устройством 8. РО 3 содержит информационную систему 10, функционально связанную с регистратором 9 и выполненную с возможностью хранения заданных координат Xn, Yn, Zn и заданных времен задержек, при необходимости. Также информационная система 10 выполнена с возможностью, при необходимости, центрирования указанных моментов времен приема р/с, в том числе при необходимости с исключенными указанными временами задержек, и определения таким образом зарегистрированных моментов времен tn и измерения упомянутых параметров dn, измерения упомянутых параметров ci, a j, bk, Al в соответствии с уравнениями измерений (1), (2), (3) и (4). Кроме того, информационная система 10 выполнена с возможностью измерения пространственных координат фазового центра антенны антенного устройства 7 принимающего р/с РО 3 преимущественно через параметры Al и bk в соответствии с уравнениями измерений (5).
При необходимости информационная система (10) выполнена с возможностью сохранения измеренных в сериях указанных координат x, y, z, измерения через них других траекторных характеристик РО 3, в том числе с использованием статистических методов траекторных измерений. При этом РО 3 при необходимости содержит блок отображения 11 и блок передачи информации потребителям 12, функционально связанные с информационной системой 10. ПС 2 при необходимости содержит блок приема и отображения информации 13, выполненный с возможностью приема информации, переданной указанным блоком передачи информации потребителям 12 РО 3.
Кроме того, при необходимости в ПС 2 введен контрольный принимающий р/с радиотехнический объект (КРО) 14, выполненный с возможностью приема р/с, передаваемых пунктами 4 с заданными в указанной трехмерной декартовой системе координат (X, Y, Z) координатами фазового центра его антенны xк, yк, zк, составляющие элементы которого выполнены преимущественно идентично составляющим элементам РО 3. При этом информационная система 10 КРО 14 выполнена дополнительно с возможностью коррекции указанных измеренных координат x, y, z по известным координатам xк, yк, zк и измеренным координатам xки, yки, zки фазового центра принимающей антенны КРО 14. Также ПС 2 содержит подсистему 15 управления ее работой.
Предложенная система 1 работает следующим образом.
ПС 2 передает р/с синхронизированно. При этом р/с передают упорядоченно сериями, преимущественно по одному р/с из каждого передающего р/с пункта 4, содержащего антенное устройство 5 и передающее р/с устройство 6, в серии. Интервалы между сериями заданы не обязательно одинаковыми. При необходимости передающие р/с пункты 4 передают р/с с заданными индивидуальными признаками, в том числе сложные и составные р/с с заданными индивидуальными признаками их элементов и возможностью их разделения при приеме. Также при необходимости р/с передают с заданными, не обязательно одинаковыми, и известными на РО 3 задержками по времени между р/с.
Радиосигналы принимают на конкретном РО 3 и идентифицируют их соответствующим передающим р/с пунктам 4. На этом объекте регистратором 9 регистрируют моменты времен приема р/с в заданной на нем системе отсчета времени. При необходимости в информационной системе 10 исключают из них соответствующие указанные времена задержек. В ней же указанные моменты времен приема р/с с исключенными временами задержек при необходимости центрируют посредством исключения из каждого момента времени среднего значения всех моментов времен серии. На основании таким образом зарегистрированных моментов времен tn измеряют упомянутые параметры dn. В информационной системе 10 РО 3 через указанные координаты Xn, Yn, Zn и измеренные параметры dn измеряют параметры ci, a j, bk и Al в соответствии с уравнениями измерений (1), (2), (3) и (4). И, наконец, пространственные координаты x, y, z фазового центра принимающей антенны РО 3 измеряют преимущественно через параметры Al и bk в соответствии с уравнениями измерений (5). При необходимости серии и все указанные действия в них повторяют и через измеренные в сериях координаты x, y, z РО 3 измеряют другие траекторные характеристики этого объекта, в том числе с использованием статистических методов траекторных измерений. Эту информацию при необходимости отображают и передают потребителям соответственно в блоках 11 и 12. При необходимости переданную потребителям информацию принимают и отображают в блоке 13 на ПС 2.
Кроме того, при необходимости р/с ПС 2 также принимают на КРО 14 с заданными в указанной трехмерной декартовой системе координат (X, Y, Z) координатами фазового центра его принимающей антенны xк, yк, zк. При этом на КРО 14 р/с принимают преимущественно идентично приему р/с на РО 3. Координаты xки, yки, zки фазового центра принимающей антенны КРО 14 измеряют идентично указанному измерению координат РО 3. Затем корректируют измеренные координаты x, y, z РО 3 по известным координатам xк, yк, zк и измеренным координатам xки, yки, zки фазового центра принимающей антенны КРО 14.
Перечислим основные достоинства системы:
- обеспечивает однозначное определение пространственных координат объекта с большой точностью, соответствующей современным требованиям,
- не требуется общая синхронизация совокупности передающих и принимающих радиосигналы радиотехнических объектов,
- обеспечивает возможность производить измерения с использованием одного из известных радиотехнических методов и существующей элементной базы и микропроцессорной техники,
- реализация системы проще и дешевле, чем известных аналогов,
- пространственные координаты определяют посредством косвенного измерения с использованием простых выражений,
- позволяет осуществлять одновременные измерения на неограниченном количестве радиотехнических объектов.
Результативность и эффективность использования заявляемой системы состоит в том, что она может быть применена на практике для развития и совершенствования радиотехнических систем определения, преимущественно, координат объектов, а также в других приложениях. Таким образом, заявляемая система обеспечивает появление новых свойств. Проведенный анализ позволил установить: системы с совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют, что указывает на соответствие заявленной системы условию «новизны».
Также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения действий на достижение указанного результата. Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2530234C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2530236C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2543470C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2013 |
|
RU2530240C1 |
| РАДИОТЕХНИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2530233C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2013 |
|
RU2542659C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2013 |
|
RU2530239C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2013 |
|
RU2530232C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2013 |
|
RU2530241C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ | 2013 |
|
RU2530231C1 |
Изобретение относится к технике связи и может использоваться для определения пространственных координат стационарного или подвижного принимающего радиосигналы (р/с) радиотехнического объекта (РО). Технический результат заключается в повышении эффективности и упрощении соответствующих радиотехнических комплексов. Радиотехническая система (PC) содержит наземную пунктовую передающую р/с систему с N≥5 передающими р/с пунктами (ПП), координаты фазовых центров (ФЦ) антенн которых известны на РО. ПП выполнены с возможностью синхронизированной упорядоченной передачи р/с сериями, с заданными индивидуальными признаками и с заданными задержками по времени между р/с, обеспечивающими упорядоченный приход р/с на РО, находящийся в любой точке зоны обслуживания. Каждый РО содержит принимающее р/с устройство, выполненное с возможностью приема и идентификации р/с соответствующим ПП, регистратор моментов времен их приема в заданной на РО системе отсчета времени и информационную систему (ИС), выполненную с возможностью по упомянутым координатам и моментам времен приема р/с в серии, с учетом указанных заданных задержек по времени между р/с, измерения координат ФЦ антенны РО в соответствии с предложенными уравнениями измерений. 1 ил.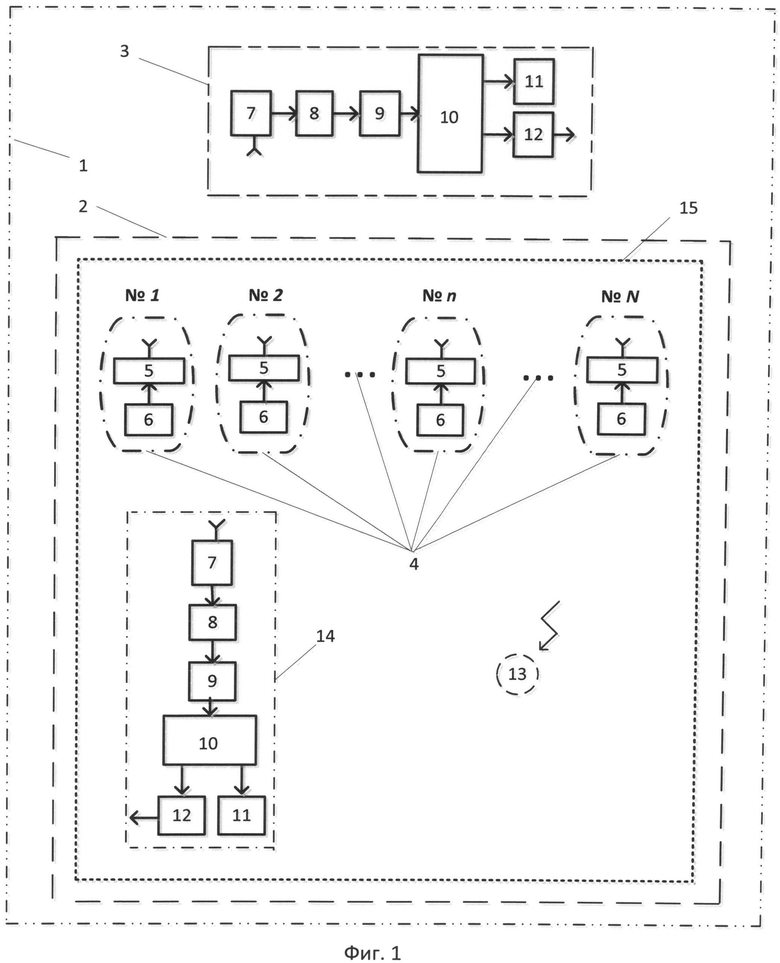
Радиотехническая система, содержащая наземную пунктовую передающую радиосигналы систему и принимающие радиосигналы радиотехнические объекты, стационарные или подвижные, при этом указанная наземная пунктовая передающая радиосигналы система включает упорядоченно пронумерованные передающие радиосигналы пункты, в количестве N не менее пяти, каждый из них содержит антенные устройства, фазовые центры передающих антенн которых находятся в заданных, не расположенных в одной плоскости, и известных, в том числе на упомянутых объектах, точках с координатами Xn, Yn, Zn, где индекс n изменяется от 1 до Ν, соответственно, в заданной трехмерной декартовой системе координат (X, Y, Z), и подсоединенные к антенным устройствам передающие радиосигналы устройства, выполненные с возможностью синхронизированной упорядоченной передачи радиосигналов сериями из каждого передающего радиосигналы пункта с заданными интервалами между сериями, указанные передающие радиосигналы устройства выполнены с возможностью передачи радиосигналов с заданными индивидуальными признаками, в том числе сложных и составных радиосигналов с заданными индивидуальными признаками их элементов и возможностью их разделения при приеме, и с заданными и известными на упомянутых принимающих радиосигналы радиотехнических объектах задержками по времени между радиосигналами, а каждый принимающий радиосигналы радиотехнический объект содержит антенное устройство, подключенное к нему принимающее радиосигналы устройство, выполненное с возможностью приема радиосигналов наземной пунктовой передающей радиосигналы системы и их идентификации соответствующим передающим радиосигналы пунктам, регистратор моментов времен приема радиосигналов от упомянутых передающих радиосигналы пунктов в заданной на принимающем радиосигналы радиотехническом объекте системе отсчета времени, соединенный с принимающим радиосигналы устройством, и информационную систему, функционально связанную с регистратором и выполненную с возможностью хранения упомянутых заданных координат Xn, Yn, Zn, указанных заданных времен задержек и с возможностью центрирования указанных моментов времен приема радиосигналов, в том числе с исключенными указанными временами задержек, посредством исключения из каждого момента времени среднего значения всех моментов времен серии и определения таким образом зарегистрированных моментов времен tn, также указанная информационная система выполнена с возможностью измерения параметров dn с размерностью длины dn=υtn, где υ - скорость распространения радиосигнала, и через измеренные параметры dn и упомянутые координаты Xn, Yn, Zn измерения параметров ci, где индекс i изменяется от 0 до 6, параметров a
j с размерностью длины в четвертой степени, где индекс j изменяется от 1 до 6, и параметров bk с размерностью длины в пятой степени, где индекс к изменяется от 1 до 3, в соответствии с уравнениями измерений








где параметр  , с возможностью измерения через параметры a
j параметров Al, где индекс l изменяется от 0 до 6, в соответствии с уравнениями измерений
, с возможностью измерения через параметры a
j параметров Al, где индекс l изменяется от 0 до 6, в соответствии с уравнениями измерений  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , и с возможностью измерения пространственных координат фазового центра приемной антенны принимающего радиосигналы радиотехнического объекта x, y, z через параметры Al и bk в соответствии с уравнениями измерений x=(A1b1+A4b2+A5b3)/A0, y=(A4b1+A2b2+A6b3)/A0, z=(A5b1+A6b2+A3b3)/A0, также информационная система выполнена с возможностью сохранения измеренных в сериях указанных координат x, y, z, измерения через них других траекторных характеристик принимающего радиосигналы радиотехнического объекта, в том числе с использованием статистических методов траекторных измерений, при этом принимающий радиосигналы радиотехнический объект содержит блок отображения и блок передачи информации потребителям, функционально связанные с указанной информационной системой, при этом наземная пунктовая передающая радиосигналы система содержит блок приема и отображения информации, выполненный с возможностью приема информации, переданной указанным блоком передачи информации потребителям принимающего радиосигналы радиотехнического объекта, кроме того, в наземную пунктовую передающую радиосигналы систему введен контрольный принимающий радиосигналы радиотехнический объект, выполненный с возможностью приема радиосигналов, передаваемых упомянутыми пунктами наземной пунктовой передающей радиосигналы системы, с заданными в указанной трехмерной декартовой системе координат (X, Y, Z) координатами фазового центра его антенны xк, yк, zк, при этом информационная система упомянутого контрольного радиотехнического объекта выполнена дополнительно с возможностью коррекции указанных измеренных координат x, y, z по известным координатам xк, yк, zк и измеренным координатам xки, yки, zки фазового центра принимающей антенны контрольного принимающего радиосигналы радиотехнического объекта, также наземная пунктовая передающая радиосигналы система содержит подсистему управления ее работой.
, и с возможностью измерения пространственных координат фазового центра приемной антенны принимающего радиосигналы радиотехнического объекта x, y, z через параметры Al и bk в соответствии с уравнениями измерений x=(A1b1+A4b2+A5b3)/A0, y=(A4b1+A2b2+A6b3)/A0, z=(A5b1+A6b2+A3b3)/A0, также информационная система выполнена с возможностью сохранения измеренных в сериях указанных координат x, y, z, измерения через них других траекторных характеристик принимающего радиосигналы радиотехнического объекта, в том числе с использованием статистических методов траекторных измерений, при этом принимающий радиосигналы радиотехнический объект содержит блок отображения и блок передачи информации потребителям, функционально связанные с указанной информационной системой, при этом наземная пунктовая передающая радиосигналы система содержит блок приема и отображения информации, выполненный с возможностью приема информации, переданной указанным блоком передачи информации потребителям принимающего радиосигналы радиотехнического объекта, кроме того, в наземную пунктовую передающую радиосигналы систему введен контрольный принимающий радиосигналы радиотехнический объект, выполненный с возможностью приема радиосигналов, передаваемых упомянутыми пунктами наземной пунктовой передающей радиосигналы системы, с заданными в указанной трехмерной декартовой системе координат (X, Y, Z) координатами фазового центра его антенны xк, yк, zк, при этом информационная система упомянутого контрольного радиотехнического объекта выполнена дополнительно с возможностью коррекции указанных измеренных координат x, y, z по известным координатам xк, yк, zк и измеренным координатам xки, yки, zки фазового центра принимающей антенны контрольного принимающего радиосигналы радиотехнического объекта, также наземная пунктовая передающая радиосигналы система содержит подсистему управления ее работой.
| СИСТЕМА ПРИЕМА РАДИОСИГНАЛОВ НА ОБЪЕКТАХ | 2011 |
|
RU2453996C1 |
| СПОСОБ ПЕРЕДАЧИ И ПРИЕМА РАДИОСИГНАЛОВ НАЗЕМНЫХ РАДИОМАЯКОВ | 2010 |
|
RU2439799C1 |
| ДАЛЬНОМЕРНО-РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2007 |
|
RU2363010C2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

