Данное предложение относится к области радиотехники и может быть использовано в пассивных радиотехнических комплексах для определения координат источников изотропного и квазиизотропного радиоизлучения.
Координатами объекта называется упорядоченный набор линейных и(или) угловых числовых величин, определяющих положение объекта на поверхности или в пространстве в соответствующей системе координат [1].
Поэтому устройства для определения координат разделяются на две группы:
1) системы определения местоположения (ОМП) - устройства для определения трех координат объекта;
2) пеленгаторы - устройства для определения одной или двух угловых координат объекта.
В современных пассивных системах определения координат широко используется разностно-дальномерный (РДМ) принцип.
Так известен [2] РДМ способ определения трех линейных координат источника радиоизлучения (ИРИ), предполагающий выполнение следующего:
- размещают четыре антенны в разнесенных точках Ai, i=1, 2, 3, 4 таким образом, что объем  ;
;
- одновременно принимают сигнал ИРИ на все антенны;
- измеряют три независимых разности времен Δtj1=tj-t1, j=2, 3, 4 приема сигнала парами антенн, образующих измерительные антенные базы (где tj - время приема сигнала в точке Аj);
- составляют систему нелинейных уравнений, связывающих искомые координаты 〈x,у,z〉 ИРИ с координатами 〈хi,уi,zi〉 точек приема Аi, i=1, 2, 3, 4 и измеренными разностями дальностей Δrj1=Δtj1/с (где с - скорость распространения электромагнитных волн):

- вводят дополнительную переменную r1 и преобразуют систему нелинейных уравнений (1) к виду системы линейных уравнений:

где 
 , j=2, 3, 4;
, j=2, 3, 4;
- подставляют решения системы линейных уравнений (2) вида x(r1), у(r1), z(r1) в уравнение (3) и решают квадратное уравнение относительно неизвестного значения r1;
- находят два набора корней системы уравнений (2) для двух значений r1;
- выбирают из двух наборов корней один, соответствующий искомым координатам ИРИ.
Недостатками данного способа является необходимость априорной информации о местоположении объекта для выполнения последней операции (неоднозначность решения) и необходимость использования 4-х антенн для определения трех координат ИРИ.
Известен [3] РДМ способ пеленгования, который предполагает выполнение следующих операций:
- располагают три антенны в вершинах треугольника ΔАВС;
- принимают сигнал ИРИ на все три антенны;
- измеряют разности времен ΔtAC и ΔtBC приема сигнала ИРИ антеннами, образующими измерительные базы {A,C} и {В,С};
- вычисляют значения разностей дальностей от ИРИ до пар антенн с использованием выражений:
ΔrАС=ΔtАС·νЭМВ, ΔrВС=ΔtВС·νЭMB, ΔrАВ=ΔrАС-ΔrВС,
где νЭМБ - скорость распространения электромагнитной волны,
- вычисляют значение γ азимута ИРИ с использованием выражения

где x3=(b2-c2)/a;  ;
;
а=|АВ|/2; b=|AС|/2; с=|BС|/2;
- вычисляют координаты {хF,уF} точки F, принадлежащей линии пеленга ИРИ, с использованием выражений:


где  ;
;
- отображают полученные результаты.
Недостаток данного способа состоит в том, что определяется только одна угловая координаты ИРИ - азимут γ (см. фиг.1), тогда как для однозначного определения координат ИРИ необходимо определить также угол места β и дальность до ИРИ.
Данный способ выбран в качестве прототипа.
Целью изобретения является обеспечение возможности определения трех координат ИРИ.
Поставленная цель достигается тем, что в способе пеленгования (определения угловых координат) ИРИ, основанном на приеме его сигнала тремя антеннами, образующими две измерительные базы, измерении разностей времен приема сигнала ИРИ антеннами, образующими измерительные базы, вычислении значения азимута ИРИ, а также координат точки, принадлежащей линии пеленга ИРИ, дополнительно вычисляют значение угла места ИРИ, измеряют плотности потока мощности сигнала ИРИ в точках размещения двух антенн, вычисляют дальность до ИРИ от точки, координаты которой также вычисляют, вычисляют дальность до ИРИ от точки, принадлежащей линии пеленга ИРИ, а вычисленные координаты ИРИ отображают в удобном виде.
Предлагаемый способ предполагает выполнение следующих операций:
- располагают три антенны в вершинах треугольника Δ АВС, при этом антенны 1, 2 и 3 располагают в точках А, В и С соответственно;
- принимают сигнал ИРИ на все три антенны;
- измеряют разности времен ΔtAC и ΔtBC приема сигнала ИРИ антеннами, образующими измерительные базы {А,С} и {В,С},
- измеряют плотности потока мощности Р1 и Р2 сигнала в точках размещения антенн 1 и 2;
- вычисляют значения разностей дальностей от ИРИ до пар антенн с использованием выражений:
ΔrАС=ΔtАС·νЭMB, ΔrВС=ΔtВС·νЭМВ, ΔrАВ=ΔrАС-ΔrВС,
где νЭМВ - скорость распространения электромагнитной волны,
- вычисляют значение γ азимута ИРИ с использованием выражения

где x3=(b2-с2]/a;
 ;
;
а=|АВ|/2;
b=|АС|/2;
с=|ВС|/2;
- вычисляют координаты {хF,yF} точки F, принадлежащей линии пеленга ИРИ, с использованием выражений:


где  ;
;
- вычисляют значение угла места β ИРИ с использованием выражения
β=arctg(l/a1),
где  ,
,
a1=ΔrAB/2;  ;
;
- вычисляют значение дальности L до ИРИ от точки J и координаты точки J с использованием выражений:
 ,
,
xJ=2aP2/(P1-P2)-a,
уJ=0, zJ=0,
- вычисляют значение дальности L' до ИРИ от точки F с использованием выражения

где Δx=xJ-xF;
- отображают полученные результаты.
Устройство, реализующее данный способ, состоит из трех функционально взаимосвязанных элементов (фиг.2):
- антенной системы, содержащей три антенны 1, 2 и 3;
- системы измерения, содержащей блоки 4 и 5, предназначенные для измерения разностей времен приема сигнала ИРИ парами антенн {1;3} и {2;3}, и блоки 6 и 7, предназначенные для измерения плотности потока мощности принимаемых сигналов в точках размещения антенн 1 и 2;
- системы обработки и отображения, содержащей вычислительный блок 8 и блок 9, осуществляющий визуализацию результатов.
Принцип работы устройства, реализующего предлагаемый способ, состоит в следующем:
антенны 1, 2 и 3 располагают в трех точках трехмерного пространства А, В, С, имеющих координаты 〈xA,уA,zA〉, 〈хB,уB,zB〉 и 〈xС,уС,zС〉 соответственно.
Для удобства и наглядности дальнейшего изложения предположим, что точка расположения ИРИ совпадает с некоторой точкой D, имеющей неизвестные координаты 〈x,у,z〉.
Любое радиоизлучение во временной области может быть представлено в виде потока бесконечно коротких импульсов [4]. Представим излучение ПРИ в виде последовательности импульсов, задаваемых функцией
 ,
,
 ;
;
ti - момент времени появления i-го импульса;
Ui - амплитуда i-го импульса.
Тогда излучение ИРИ можно характеризовать мощностью P0 и временем t0 излучения i-го импульса.
Местоположение ИРИ относительно опорных точек (ОТ) характеризуется дальностью r. Плотность потока мощности РП, создаваемая i-м импульсом излучения в ОТ, и время tП прихода i-го импульса излучения в ОТ содержат информацию о дальности r. При этом плотность потока мощности излучения в ОТ и излученная мощность связаны со значением дальности мультипликативным соотношением
PП=P0·k1{r),
а время прихода в ОТ и время излучения i-го импульса - аддитивным
tП=t0+k2(r),
где k1(r), k2(r) - функции дальности.
При распространении в изотропной среде для точечного ИРИ
k1(r)=1/(4πr2), k2(r)=r/c,
где с - скорость распространения электромагнитного излучения.
Измерив значения РП и tП в ОТ, при известных значениях P0 и t0, значение дальности r может быть определено с использованием формул:
 ,
,
r=c(tП-t0),
где Ф - коэффициент пропорциональности, учитывающий форму диаграммы направленности передающей антенны.
Методы измерения дальности, основанные на таком подходе, называются соответственно амплитудными и временными. Они широко применяются в радиолокации и радионавигации. Однако в других практических случаях, в частности при пассивном определении координат ИРИ, значения P0, Ф и t0 неизвестны.
При наличии двух ОТ неизвестные значения P0 и t0 могут быть исключены из рассмотрения. Если ИРИ является изотропным или квазиизотропным (ИРИ излучает во все стороны с одинаковой интенсивностью в одной плоскости, что свойственно для ИРИ УКВ диапазона, использующих вертикальные штыревые антенны), значение Ф также исключается из рассмотрения.
Из системы уравнений
где РП1 и РП2 - значения плотности потока мощности излучения в двух пространственно разнесенных ОТ О1 и О2,
можно составить пропорцию
 .
.
Выбрав систему координат (СК) таким образом, чтобы выполнялись условия:
 ,
,  ,
,
где R - расстояние между ОТ (фиг.3),
можно записать
 ,
,
откуда следует, что
х2РП1+у2РП1+z2РП1-x2РП2+2xRPП2-R2РП2-у2РП2-z2РП2=0.
Данное уравнение можно переписать в виде
x2[РП1-PП2)+у2(PП1-РП2)+z2(РП1-РП2)+2xRРП2-R2РП2=0.
Поскольку
 ,
,
то можно записать
 .
.
Разделив все слагаемые на (РП1-РП2), окончательно можно получить, что
 .
.
Полученное уравнение представляет собой каноническое уравнение сферы с центром в точке с координатами  и радиусом, равным
и радиусом, равным  .
.
Таким образом, для случая наличия двух точек приема и при наличии информации о значениях плотности потока мощности сигнала в этих точках, априорная неопределенность пространственного положения ИРИ снижается до принадлежности поверхности положения в виде сферы с параметрами, определяемыми из приведенных выражений.
Аналогично, из системы уравнений

где tП1 и tП2 - значения моментов времени приема излучения в двух пространственно разнесенных ОТ O1 и О2,
можно составить уравнение
tП1-tП2=k2(r1)-k2(r2).
С учетом того, что
k2(ri)=ri/c, i=1, 2.
можно записать
tП1-tП2=(r1-r2)/c.
Выбрав СК таким образом, чтобы выполнялись условия (фиг.4)
 ,
,  ,
,
можно получить
 .
.
Возведя в квадрат правую и левую части уравнения, получим
 ,
,
а, следовательно,

Если раскрыть скобки в левой части и произвести упрощения, то уравнение (4) можно представить в виде уравнения двуполостного гиперболоида вращения
 ,
,
где a1=Δr/2;  .
.
Таким образом, для случая двух точек приема и при наличии информации о значениях времени приема сигнала в этих точках априорная неопределенность пространственного положения ИРИ снижается до принадлежности поверхности положения в виде двуполостного гиперболоида вращения с параметрами, определяемыми из приведенных выше выражений.
Обозначим разность расстояний от точки ИРИ до антенн 1 и 3 через ΔrAC, до антенн 2 и 3 - через ΔrBC, до антенн 1 и 2 - через ΔrAB, плотность потока мощности сигнала на входе антенны 1 - через Р1, на входе антенны 2 - через P2.
На основе обработки двух значений разностей дальностей ΔrAB и ΔrAC вычисляют азимут γ, угол места β ИРИ и координаты {хF,уF) точки F, через которую проходит линия положения ИРИ (фиг.5) с использованием выражений [3]:



где x3=(b2-c2)/a;  ;
;
а=|АВ|/2; b=|АС|/2; с=|ВС|/2;
 ;
;  ;
;
a1=ΔrAB/2;  .
.
На основе обработке двух значений плотности потока мощности Р1 и Р2 вычисляют значение дальности L до ИРИ от точки J и координаты точки J (фиг.5) с использованием выражений:
 ,
,
xJ=2aP2/{P1-P2)-a,
уJ=0, zJ=0.
Поскольку линия пеленга проходит через точку F, то для практического удобства целесообразно определить дальность до ИРИ не от точки J, а от точки F.
Линия пеленга ИРИ, проходящая через точку F, и заданная углами γ и β, является линией положения ИРИ. Сфера, заданная центром в точке J и радиусом L, является поверхностью положения ИРИ. Следовательно, ИРИ расположен в точке пересечения линии пеленга с этой сферой.
Поскольку ИРИ принадлежит линии пеленга, следовательно, принадлежит и плоскости Ω, перпендикулярной плоскости хОу и проходящей через точку F под углом γ к оси Ох (поскольку эта плоскость содержит линию пеленга). Линия пересечения плоскости Ω и сферы, соответствующей дальности L, представляет собой окружность радиуса |NS| (фиг.6).
Координата точки М по оси х может быть вычислена с использованием выражения
xМ=xF-уFctg(γ).
Следовательно
|JN|=|JM|ctg(γ)=(xJ-xМ)ctg(γ).
Следовательно, можно вычислить
 .
.
Поскольку L'=|FD|, то с учетом фиг.7 можно записать
 .
.
В итоге
 ,
,
где Δx=xJ-xF.
Таким образом, на заключительном этапе вычисляют значение дальности L' до ИРИ от точки F с использованием выражения
 .
.
и отображают полученные результаты.
В состав заявляемого устройства входят (фиг.2):
1 - антенна;
2 - антенна;
3 - антенна;
4 - измеритель разности времен;
5 - измеритель разности времен;
6 - измеритель плотности потока мощности;
7 - измеритель плотности потока мощности;
8 - вычислительный блок;
9 - блок индикации.
Выходы антенн 1 и 2 соединены с первыми входами измерителей разности времен 4 и 5 соответственно, на вторые входы которых подается сигнал с выхода антенны 3. Выходы антенн 1 и 2 также соединены со входами измерителей плотности потока мощности 6 и 7 соответственно. Выходы измерителей разности времен 4 и 5 подключены к первому и второму входам вычислительного блока 8 соответственно. Выходы измерителей плотности потока мощности 6 и 7 подключены к третьему и четвертому входам вычислительного блока 8 соответственно. Выход вычислительного блока 8 подключен ко входу блока индикации 9.
Антенны 1, 2 и 3 располагают в вершинах треугольника ΔАВС соответственно.
Сигналы с выходов антенн 1 и 3 поступают на первый и второй входы измерителя разности времен 4 соответственно, аналогично сигналы с выходов антенн 2 и 3 поступают на первый и второй входы измерителя разности времен 5 соответственно. Измерители разности времен 4 и 5 осуществляют операцию измерения разностей времен ΔtAC и ΔtBC прихода сигнала ИРИ на пары антенн {1,3} и {2,3}.
Измерители разности времен 4 и 5 реализуют один из известных [например, 5] способов измерения разности времен.
С выходов измерителей разностей времен 4 и 5 измеренные значения ΔtAC и ΔtBC поступают на первый и второй входы вычислительного блока 8 соответственно.
Сигналы с выходов антенн 1 и 2 также поступают на входы измерителей плотности потока мощности 6 и 7 соответственно. Измерители плотности потока мощности 6 и 7 осуществляют операцию измерения плотности потока мощности P1 и Р2 сигнала ИРИ на входах антенн 1 и 2 соответственно.
Измерители плотности потока мощности 6 и 7 реализуют один из известных способов измерения плотности потока мощности. Из уровня техники известны измерители плотности потока мощности ПО-1, М3-10, П3-9, П3-13, П3-18 и др.
С выходов измерителей плотности потока мощности 6 и 7 измеренные значения Р1 и Р2 поступают на третий и четвертый входы вычислительного блока 8 соответственно.
Вычислительный блок 8 представляет собой специализированное вычислительное устройство, в котором последовательно выполняются следующие операции:
- вычисляются значения разностей дальностей ΔrАC, ΔrBC и ΔrAB с использованием выражений:
ΔrАС=ΔtАС·νЭMB, ΔrВС=ΔtВС·νЭМВ, ΔrАВ=ΔrАС-ΔrВС.
- вычисляется значение γ азимута ИРИ с использованием выражения

- вычисляются значения xF, уF координат точки F, принадлежащей линии положения ИРИ, с использованием выражений:


где  ,
,
- вычисляется значение угла места β ИРИ с использованием выражения
 ,
,
- вычисляется значение дальности L до ИРИ от точки J и координаты точки J с использованием выражений:
 ,
,
хJ=2аР2/(Р1-Р2)-а,
- вычисляется значение дальности L' до ИРИ от точки F с использованием выражения
 ,
,
где Δx=xJ-xF.
Необходимые для проведения вычислений априорно известные значения:
- νЭМВ - скорости распространения электромагнитной волны;
- а - половины расстояния между антеннами 1 и 2;
- x3, у3 - координат антенны 3 в системе координат Oxyz хранятся в памяти вычислительного блока 8.
Вычисленные значения γ, β, xF, уF, L' с выхода вычислительного блока 8 поступают в блок индикации 9, который предназначен для визуализации результатов предлагаемого способа.
Таким образом, предлагаемые способ и устройство для его реализации, по сравнению с прототипом, обеспечивают возможность определения трех координат ИРИ за счет определения дальности до ИРИ.
СПИСОК ЛИТЕРАТУРЫ
1. Шебшаевич B.C. Введение в теорию космической навигации. - М.: Сов. радио, 1971. - 296 с.
2. Дулевич В.Е., Коростелев А.А., Мельник Ю.А. и др. Теоретические основы радиолокации / Под ред. В.Е.Дулевича. - М.: Сов. радио, 1964. - 732 с.
3. Сайбель А.Г. Разностно-дальномерный способ пеленгования источника радиоизлучения и реализующее его устройство. Патент РФ №2258242 от 31.05.2005.
4. Седякин Н.М. Элементы теории случайных импульсных потоков. - М.: Сов. радио, 1965. - 263 с.
5. Wuu Chenn, Pearson Allan E. On time deley estimation involving received signals // IЕЕЕ Trans. Acount, Speech and Signal Process., 1984, 32, N 4, C.828-835.
Использование: определения координат источника радиоизлучения (ИРИ) в пространстве. Сущность изобретения: в качестве поверхностей положения ИРИ используются двуполостные гиперболоиды вращения, соответствующие двум разностно-временным измерениям, и сфера, параметры которой определяются при обработке значений плотности потока мощности в точках размещения двух приемных антенн. Способ основан на приеме сигнала ИРИ тремя антеннами, измерении значений двух разностей времен приема сигнала ИРИ антеннами, образующими измерительные базы, измерении двух значений плотности потока мощности сигнала ИРИ, последующей обработке результатов измерений с целью вычисления значений азимута, угла места ИРИ, координат точки, через которую проходит линия положения ИРИ, и дальности до ИРИ от этой точки. Предложен вариант устройства для определения координат ИРИ. Устройство содержит три антенны, два измерителя разности времен приема сигнала, два измерителя плотности потока мощности, вычислительный блок и блок индикации. Достигаемым техническим результатом изобретения является обеспечение возможности определения трех координат ИРИ. 2 н.п. ф-лы, 7 ил.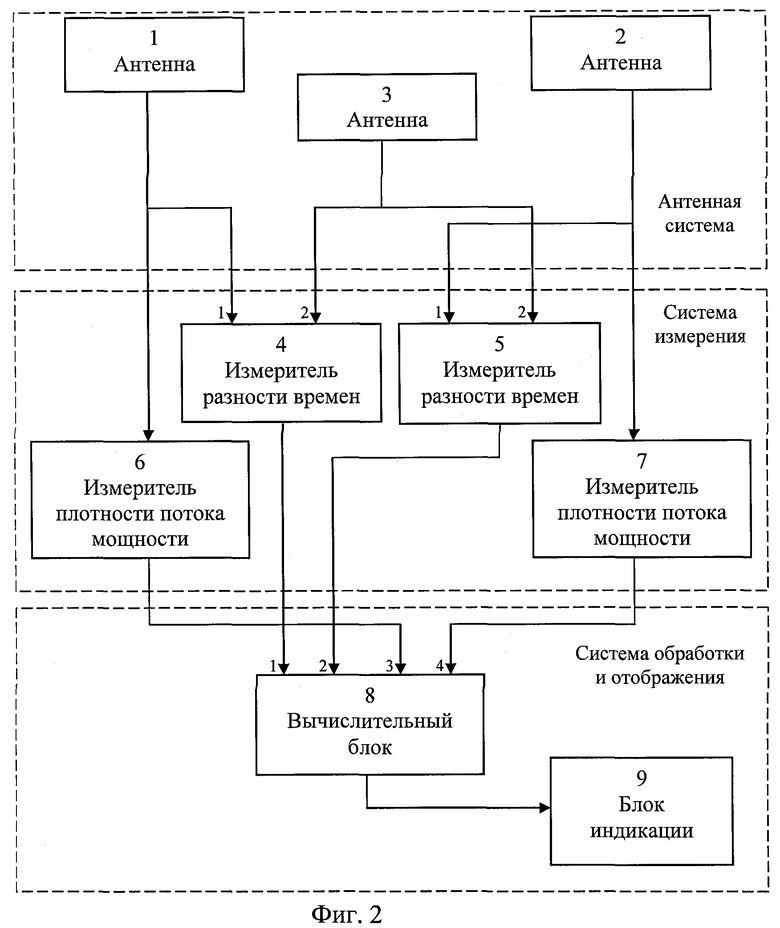
1. Способ определения координат источника радиоизлучения (ИРИ), основанный на приеме сигналов ИРИ на три антенны, отличающийся тем, что располагают три антенны в вершинах треугольника ΔАВС, измеряют разности времен ΔtAC и ΔtBC приема сигнала ИРИ антеннами, образующими измерительные базы {А,С} и {В,С}, вычисляют значения ΔrАС, ΔrBC и ΔrАВ разностей дальностей от ИРИ до пар антенн, вычисляют значение γ азимута ИРИ с использованием выражения
γ=arctg(a(ΔrAC+ΔrBC)-x3(ΔrAC-ΔrBC))/(у3(ΔrBC-ΔrАС)), где х3=(b2-с2)/а; у3=√4b2-(а+x3)2; а=|АВ|/2; b=|AC|/2; с=|ВС|/2, вычисляют координаты {xF, yF) точки F, принадлежащей линии пеленга ИРИ, с использованием выражений:
xF=(2аΔrАС-(а+х3)ΔrAB)(a2+ΔrAC(ΔrAC-ΔrAB)-g2)ΔrAB/К,
yF=-у3(4а2-Δr2 АВ)(a2-g2+ΔrАС(ΔrАС-ΔrАВ))/К,
К=4а2(у3 2+ΔrAC(ΔrAB-ΔrAC))-Δr2 АВ(а2+g2)+2ах3(2-Δr2 АВ);
g=√х3 2+у3 2,
вычисляют значение угла места β ИРИ с использованием выражения β=arctg(l/а1), где l=√(b1 2cos2γ-а1 2sin2γ); а1=ΔrАВ/2; b1=√Δа2-Δr2 AB/2, измеряют плотности потока мощности P1 и Р2 сигнала ИРИ в точках А и В соответственно, вычисляют значение дальности L до ИРИ от точки J, которая является центром сферы с радиусом L, являющейся поверхностью положения ИРИ, вычисляют также координаты точки J с использованием выражений:
L=2a√P1P2/|P1-P2|, xJ=2aP2/(P1-P2)-a, yJ=0, zJ=0, вычисляют значение дальности L' до ИРИ от точки F с использованием выражения L'=(Δх·cos(γ)-уF·sin(γ)·cos(β)+√L2-(Δx·sin(γ)-yF-cos(γ))2-(Δx-cos(γ)-yF·sin(γ))2·sin2(β), где Δx=xJ-xF, и отображают полученные результаты.
2. Устройство для определения координат источника радиоизлучения (ИРИ), содержащее три приемные антенны, два измерителя разности времен приема сигнала ИРИ, вычислительный блок и блок индикации, причем выходы первой и второй антенн подключены соответственно к первым входам первого и второго измерителей разности времен приема сигнала ИРИ, вторые входы которых соединены с выходом третьей антенны, а выходы подключены соответственно к первому и второму входам вычислительного блока, выход которого подключен к входу блока индикации, отличающееся тем, что введены два измерителя плотности потока мощности сигнала ИРИ, предназначенные для измерения плотности потока мощности сигнала ИРИ в точках размещения первой и второй антенн, входы первого и второго измерителей плотности потока мощности сигнала ИРИ соединены с выходами первой и второй антенн соответственно, а выходы подключены соответственно к третьему и четвертому входам вычислительного блока, предназначенного для вычисления азимута γ, угла места β ИРИ, координат точки F, принадлежащей линии пеленга ИРИ, дальности L до ИРИ от точки J, координат точки J, дальности L' до ИРИ от точки F, при этом точка J является центром сферы с радиусом L, являющейся поверхностью положения ИРИ.
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2003 |
|
RU2258242C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ПЕЛЕНГОВАНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ И РЕАЛИЗУЮЩЕЕ ЕГО УСТРОЙСТВО | 2000 |
|
RU2204145C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ЛОКАЛИЗАЦИИ СЛОЖНЫХ СИГНАЛОВ | 2005 |
|
RU2286583C1 |
| US 4641143 A, 03.02.1987 | |||
| КРУГ ПОВОРОТНЫЙ | 2004 |
|
RU2263597C2 |
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| WO 2006114426 A1, 02.11.2006. | |||

