Область техники
Изобретение относится к аппарату и системе для облегчения подъема, а также к способу, облегчающему пользователю процесс подъема. Изобретение относится преимущественно, но не исключительно, к аппарату и способу, облегчающим пользователю подъем лазанием или аналогичное действие.
Уровень техники
В настоящее время в продаже имеется много систем, которые обеспечивают поддержку людям, взбирающимся по приставным лестницам или иным конструкциям. Известные системы реализуют различные способы оказания такой поддержки. Однако, как правило, все они направлены на создание подъемного усилия, прикладываемого к веревке или шнуру, чтобы преодолеть часть веса пользователя. При этом "тянущая сила", приложенная к веревке или шнуру, стремится подтянуть тело с усилием, несколько меньшим веса тела.
Один из недостатков, присущих известным системам, связан с предотвращением непреднамеренного запроса со стороны пользователя слишком большой поддержки от системы, т.е. запроса подъемного усилия, превышающего собственный вес пользователя. В этом случае система принудительно подняла бы пользователя, что могло бы привести к нежелательным и опасным последствиям.
В попытках преодолеть этот недостаток известные системы обычно ограничивают степень поддержки со стороны системы уровнем 40-50 кгс, т.е. меньшим, чем ожидаемая масса пользователя. Эта защитная мера обладает собственным недостатком: снижение нагрузки на 50 кгс малоэффективно для пользователя, масса которого, вместе с инструментами и снаряжением, составляет 120 кг, а для пользователя с массой менее 50 кг система все же создает потенциально опасные уровни облегчения подъема.
Другие потенциальные недостатки, ассоциированные с известной технологией, состоят в том, что известные системы нельзя быстро перестроить в расчете на пользователей различного веса без непосредственного взаимодействия оператора или самих пользователей с панелью управления системы. Кроме того, известные системы не изменяют используемый уровень компенсации веса в случае изменений суммарного веса пользователя в процессе применения системы вследствие приема или оставления им инструментов и снаряжения.
Еще одним недостатком является то, что пользователь должен точно знать свою массу и массу своих инструментов и/или оборудования и иметь возможность вводить в систему значения этих масс или требуемый уровень компенсации. При этом известная система неспособна компенсировать ошибки, допущенные пользователем при вводе значений масс в систему.
Кроме того, пользователь вынужден подсоединяться к системе, только когда должен начаться подъем, поскольку система будет всегда активно стремиться приложить к пользователю подъемное усилие. Поэтому пользователь может подсоединиться (пристегнуться) к системе, когда он уже поднимается или находится на конструкции в стационарном положении, т.е. когда поддержка будет соответственно включена или отключена. Как следствие, известные системы не могут применяться для страховки пользователя, например, при его перемещении к какой-то стороне конструкции, т.к. поддерживающий аппарат либо будет заблокирован, либо будет стремиться подтянуть его вверх.
Раскрытие изобретения
Соответственно, изобретение направлено на преодоление одного или более недостатков известных систем.
Согласно своему первому аспекту изобретение обеспечивает создание устройства для калибровки нагрузки, содержащего:
генератор тягового усилия;
компонент для приложения тягового усилия, функционально связанный с генератором тягового усилия и выполненный с возможностью приложения, при использовании устройства, тягового усилия к объекту,
и механизм управления, содержащий средство детектирования нагрузки и средство приложения подъемного усилия и выполненный с возможностью управления генератором тягового усилия в первом, калибровочном режиме, в котором генератор тягового усилия остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной объектом к компоненту для приложения тягового усилия, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах.
В особенно предпочтительных вариантах указанный объект содержит пользователя, которым могут быть, в частности, человек и/или животное. Альтернативно или дополнительно, объект может содержать снаряжение, инструменты или любой другой неодушевленный предмет.
В вариантах изобретения согласно первому аспекту генератор тягового усилия может содержать один или более из следующих компонентов: механизированный барабан, таль, монтажная лебедка, кабестан, шкив, противовес и/или механизированный подъемник. Механизированный подъемник может являться, например, рычажным подъемником. Таким образом, генератор тягового усилия способен генерировать усилие, воздействующее на другое устройство и/или объект.
В некоторых вариантах согласно первому аспекту компонент для приложения тягового усилия может содержать веревку. Следует отметить, что термин "веревка" включает также шнуры любых типов, способные выдерживать нагрузку. Кроме того, веревка может быть изготовлена из природных или синтетических волокон, тканой ленты или ремня, стальной проволоки или стального троса, кабеля и т.д. В этих вариантах объект предпочтительно прикрепляется (пристегивается) к веревке. Компонент для приложения тягового усилия связан с генератором тягового усилия таким образом, чтобы получать от него тяговое усилие, которое затем данный компонент может прикладывать к объекту.
Генератор тягового усилия может быть катушкой или барабаном (далее - барабаном), а компонент для приложения тягового усилия - веревкой, предпочтительно прикрепленной к барабану и, при использовании устройства, прикрепляемой к объекту.
Согласно изобретению веревка может образовывать замкнутую петлю.
Альтернативно, веревка крепится одним концом к генератору тягового усилия и, при использовании устройства, своей дистальной частью к объекту. В некоторых вариантах веревка прикреплена одним концом к механизированному барабану и, при использовании устройства, своей дистальной частью к объекту, например к пользователю.
В альтернативных вариантах компонент для приложения тягового усилия представляет собой платформу или аналогичную конструкцию. В подобных вариантах объект предпочтительно находится на платформе. При этом должно быть понятно, что тяговое усилие прикладывается к объекту снизу, т.е. платформа толкает объект вверх, а не подтягивает его.
Объект может быть непосредственно связан с компонентом для приложения тягового усилия, или, альтернативно, связь между ними может быть непрямой.
В некоторых вариантах изобретения коэффициент а облегчения нагрузки выбран в интервале 0-99%.
Хотя обеспечиваемая поддержка подъема может составлять 99%, реально она, скорее всего, будет меньше, поскольку при ее приближении к 99% объект мог бы подвергнуться непреднамеренному подтягиванию вверх. В вариантах, в которых объект содержит пользователя-человека, такое подтягивание было бы нежелательным, поскольку подъем проходил бы без возможности управления им со стороны пользователя.
В ряде вариантов коэффициент а облегчения нагрузки может лежать в интервале 10-70%.
Подъемное усилие может иметь любое значение. В вариантах, в которых объект содержит пользователя-человека, максимальное подъемное усилие может быть эквивалентно 140 кгс. Благодаря заданию максимального подъемного усилия в случаях, когда объект содержит пользователя-человека, устройство для калибровки нагрузки обеспечивает защиту пользователя от ситуаций, в которых к нему может быть приложено потенциально большое, т.е. нежелательное, подъемное усилие.
В альтернативных вариантах принимается, что допустимый уровень подъемного усилия может соответствовать нагрузке, безопасной для устройства по изобретению.
Подъемное усилие, определенное, как составляющее 0 кгс, означает, что средство детектирования нагрузки детектировало нагрузку 0 кгс или что заданный уровень облегчения подъема равен 0%.
Подъемное усилие в типичных условиях может изменяться в кгс или ньютонах согласно уравнению: hf=dl×a,
где:
- hf - подъемное усилие (например, в кгс),
- dl - детектированная нагрузка (например, в кгс),
- а - коэффициент облегчения нагрузки (в процентах).
Подъемное усилие должно рассматриваться как включающее и "толкающее", и "тянущее" усилия, т.е. подъемное усилие может толкать или тянуть груз (нагрузку) вверх.
Нагрузкой может быть вес пользователя, и/или инструментов, и/или снаряжения и т.д. Должно быть понятно, что для инициирования режима калибровки к компоненту для приложения тягового усилия может быть приложена любая нагрузка. При этом средство приложения подъемного усилия выполнено с возможностью определять (реагируя на детектирование нагрузки средством детектирования нагрузки) значение подъемного усилия, которое может быть приложено к нагрузке.
В некоторых вариантах изобретения средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, после того как возможность детектирования нагрузки средством детектирования нагрузки обеспечивалась в течение заданного периода.
Более конкретно, заданный период может составлять от 0 с до 10 с, например от 1 с до 5 с, предпочтительно 3-4 с. При этом условии режим калибровки не будет активироваться непроизвольно, когда объект, такой как пользователь, оказывается ассоциированным с компонентом для приложения тягового усилия в составе устройства по изобретению, а будет требовать активного участия со стороны оператора или пользователя. В группе вариантов заданное значение задержки гарантирует, что режим калибровки не будет непроизвольно активирован, когда объект, такой как пользователь, просто пристегивается к веревке устройства для калибровки нагрузки, а потребует активных действий оператора или пользователя.
В некоторых вариантах изобретения оператору или пользователю может быть подан сигнал об успешном завершении калибровки устройства по изобретению.
Данный сигнал может быть, например, звуковым. Альтернативно или дополнительно, сигнал может быть, например, визуальным или тактильным. Визуальный сигнал может быть, например, световым, а тактильный - вибрацией, передаваемой через веревку.
Согласно второму аспекту изобретение обеспечивает создание аппарата для облегчения подъема, содержащего:
генератор тягового усилия;
компонент для приложения тягового усилия, функционально связанный с генератором тягового усилия и выполненный с возможностью приложения, при использовании аппарата, тягового усилия к объекту,
и механизм управления, содержащий средство детектирования нагрузки и средство приложения подъемного усилия и выполненный с возможностью управления генератором тягового усилия в первом, калибровочном режиме, в котором генератор тягового усилия остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной объектом к компоненту для приложения тягового усилия, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах.
При этом механизм управления выполнен с возможностью переключать генератор тягового усилия во второй режим, режим облегченного подъема, в котором генератор тягового усилия воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия, а средство приложения подъемного усилия выполнено с возможностью приложения указанного определенного подъемного усилия к компоненту для приложения тягового усилия посредством генератора тягового усилия, причем подъемное усилие воздействует на компонент для приложения тягового усилия в направлении, противоположном направлению действия нагрузки.
В особенно предпочтительных вариантах объект содержит пользователя, которым могут быть, в частности, человек и/или животное. Альтернативно или дополнительно, объект может содержать снаряжение, инструменты или любой другой неодушевленный предмет.
В вариантах согласно второму аспекту изобретения генератор тягового усилия может содержать один или более из следующих компонентов: механизированный барабан, таль, монтажная лебедка, кабестан, шкив, противовес и/или механизированный подъемник. Механизированный подъемник может являться, например, рычажным подъемником. Таким образом, генератор тягового усилия способен генерировать усилие, воздействующее на другое устройство и/или объект.
В вариантах согласно второму аспекту компонент для приложения тягового усилия может содержать веревку. Должно быть понятно, что термин "веревка" включает также шнуры любых типов, способные выдерживать нагрузку. Кроме того, веревка может быть изготовлена из природных или синтетических волокон, тканой ленты или ремня, стальной проволоки или стального троса, кабеля и т.д. В этих вариантах объект предпочтительно прикрепляется к веревке. Компонент для приложения тягового усилия связан с генератором тягового усилия таким образом, чтобы получать от него тяговое усилие, которое затем данный компонент может прикладывать к объекту. В вариантах, в которых генератор тягового усилия является механизированным барабаном, а компонент для приложения тягового усилия - веревкой, веревка предпочтительно крепится к барабану и, в процессе использования аппарата, к объекту.
В некоторых вариантах веревка может образовывать замкнутую петлю.
Альтернативно, веревка крепится одним концом к генератору тягового усилия и, при использовании аппарата, своей дистальной частью к объекту. В группе вариантов веревка крепится одним концом к механизированному барабану и, при использовании аппарата, своей дистальной частью к объекту, например к пользователю.
В альтернативных вариантах компонент для приложения тягового усилия представляет собой платформу или аналогичную конструкцию. В подобных вариантах объект предпочтительно находится на платформе. При этом должно быть понятно, что тяговое усилие прикладывается к объекту снизу, т.е. платформа толкает объект вверх, а не подтягивает его.
Объект может быть непосредственно связан с компонентом для приложения тягового усилия или, альтернативно, связь между ними может быть непрямой.
В предпочтительных вариантах аппарат согласно изобретению является аппаратом для облегчения лазания. В этих вариантах объект будет содержать пользователя.
В особенно предпочтительных вариантах аппарат для облегчения лазания содержит:
механизированный барабан;
веревку, прикрепленную к барабану и, при использовании устройства, прикрепляемую к объекту,
и механизм управления, содержащий средство детектирования нагрузки и средство приложения подъемного усилия и выполненный с возможностью управления механизированным барабаном в первом, калибровочном режиме, в котором барабан остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной к веревке, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к веревке барабаном, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах.
При этом механизм управления выполнен с возможностью переключать указанный барабан во второй режим, режим облегченного подъема, в котором указанный барабан обеспечивает предотвращение слабины (провисания) веревки между пользователем аппаратом и барабаном, а средство приложения подъемного усилия выполнено с возможностью приложения к веревке, посредством барабана, подъемного усилия, обеспечивающего, в заданной степени, облегчение подъема для пользователя.
В некоторых вариантах изобретения коэффициент а облегчения нагрузки выбран в интервале 0-99%.
Хотя обеспечиваемая поддержка подъема может составлять 99%, реально она, скорее всего, будет меньше, потому что при ее приближении к 99% объект мог бы подвергнуться непреднамеренному подтягиванию вверх. В вариантах, в которых объект содержит пользователя-человека, такое подтягивание было бы нежелательным, поскольку подъем проходил бы без возможности управления им со стороны пользователя. В ряде вариантов коэффициент а облегчения нагрузки может лежать в интервале 10-70%.
Подъемное усилие может иметь любое значение. В вариантах, в которых объект содержит пользователя-человека, максимальное подъемное усилие может быть эквивалентно 140 кгс. Благодаря заданию максимального подъемного усилия в случаях, когда объект содержит пользователя-человека, аппарат обеспечивает защиту пользователя от ситуаций, в которых к нему может быть приложено потенциально большое, т.е. нежелательное подъемное усилие.
В альтернативных вариантах принимается, что допустимый уровень подъемного усилия может соответствовать нагрузке, безопасной для аппарата по изобретению.
Подъемное усилие, определенное как составляющее 0 кгс, означает, что средство детектирования нагрузки детектировало нагрузку 0 кгс или что заданный уровень облегчения подъема равен 0%.
Подъемное усилие в типичных условиях может изменяться в кгс или ньютонах согласно уравнению: hf=dl×a,
где:
- hf - подъемное усилие (например, в кгс),
- dl - детектированная нагрузка (например, в кгс),
- а - коэффициент облегчения нагрузки (в процентах).
Как и в отношении первого аспекта, согласно второму аспекту подъемное усилие должно рассматриваться как включающее и "толкающее", и "тянущее" усилия, т.е. подъемное усилие может толкать или тянуть груз (нагрузку) вверх.
Нагрузкой может быть вес пользователя, и/или инструментов, и/или снаряжения и т.д. Должно быть понятно, что для инициирования режима калибровки к веревке может быть приложена любая нагрузка.
В вариантах согласно второму аспекту средство приложения подъемного усилия выполнено с возможностью определять (реагируя на детектирование нагрузки средством детектирования нагрузки) значение подъемного усилия, которое может быть приложено к нагрузке.
В альтернативных вариантах первому, калибровочному режиму может предшествовать предкалибровочный режим, в котором механизм управления обеспечивает управление генератором тягового усилия, направленное на выравнивание усилий, связанных с объектом, до тех пор, пока средство детектирования нагрузки не будет детектировать постоянную нагрузку в течение заданного периода. После этого инициируется первый, калибровочный режим.
При приложении тягового усилия генератором к компоненту для приложения тягового усилия подъем объекта облегчается без его принудительного (непроизвольного) перемещения, поскольку подъемного усилия всегда будет недостаточно для осуществления такого перемещения.
Таким образом, уровень поддержки объекта со стороны генератора тягового усилия во втором режиме, режиме облегченного подъема, является достаточным для снижения эффективной нагрузки на компонент для приложения тягового усилия (вплоть до близкой к нулевой), в то же время гарантируя, что уровень нагрузки всегда остается соотнесенным с реальной нагрузкой, детектированной как действующая на компонент для приложения тягового усилия в режиме калибровки.
Нагрузкой может являться вес пользователя и/или инструментов, и/или снаряжения и т.д. Должно быть понятно, что для инициирования режима калибровки к компоненту для приложения тягового усилия может быть приложена любая нагрузка.
В некоторых вариантах изобретения средство приложения подъемного усилия выполнено с возможностью определять в первом режиме значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, после того как возможность детектирования нагрузки средством детектирования нагрузки обеспечивалась в течение заданного периода.
Более конкретно, заданный период может составлять от 0 с до 10 с, например от 1 с до 5 с, предпочтительно 3-4 с. При этом условии режим калибровки не будет активироваться непроизвольно, когда объект, такой как пользователь, оказывается ассоциированным с компонентом для приложения тягового усилия в составе аппарата по изобретению, а будет требовать активного участия со стороны оператора или пользователя. Активное участие со стороны пользователя может заключаться, например, в приложении своего веса к аппарату или в выдаче аппарату команды выбрать веревку.
В группе вариантов заданное значение задержки гарантирует, что режим калибровки не будет непроизвольно активирован, когда объект, такой как пользователь, просто пристегивается к веревке устройства для калибровки нагрузки, а потребует активных действий оператора или пользователя.
В некоторых вариантах изобретения оператору или пользователю может быть подан сигнал об успешном завершении калибровки аппарата по изобретению. Данный сигнал может быть, например, звуковым. Альтернативно или дополнительно, сигнал может быть, например, визуальным или тактильным. Визуальный сигнал может быть, например, световым, а тактильный - вибрацией, передаваемой через веревку.
В некоторых вариантах изобретения средство детектирования нагрузки выполнено с возможностью детектировать, при осуществлении второго режима подъема, изменение нагрузки, действующей на компонент для приложения тягового усилия.
В случае детектирования, при осуществлении режима облегченного подъема, средством детектирования нагрузки изменения нагрузки, действующей на компонент для приложения тягового усилия, механизм управления способен обеспечить перевод генератора тягового усилия в третий режим, режим необлегченного подъема, в котором генератор тягового усилия сначала воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия, а средство приложения подъемного усилия не прилагает, посредством генератора тягового усилия, никакого подъемного усилия к компоненту для приложения тягового усилия.
Таким образом, согласно некоторым вариантам, если при осуществлении аппаратом второго режима, режима облегченного подъема, средство детектирования нагрузки детектирует изменение нагрузки на веревку, механизм управления способен обеспечить перевод барабана в третий режим, режим необлегченного подъема, в котором барабан обеспечивает предотвращение слабины веревки между пользователем аппаратом и барабаном, а средство приложения подъемного усилия прекращает прикладывать, посредством барабана, подъемное усилие к веревке.
В вариантах, в которых аппарат для облегчения подъема является аппаратом для облегчения лазания, изменение нагрузки может быть вызвано тем, что пользователь поднял и/или оставил (уронил) инструменты и/или снаряжение. Альтернативно или дополнительно, изменение нагрузки может быть связано со сменой пользователей аппаратом для облегчения лазания. Если изменение нагрузки будет детектировано средством детектирования нагрузки при осуществлении аппаратом указанного второго режима, аппарат для облегчения лазания перестанет оказывать пользователю поддержку в лазании.
Альтернативно или дополнительно, аппарат для облегчения лазания, находясь в данном, втором режиме, перестанет обеспечивать пользователю поддержку, если механизм управления детектирует отсутствие активности, связанной с веревкой, в течение заданного времени. В контексте изобретения термин "отсутствие активности" означает, что пользователь не движется вперед или назад, т.е. вверх или вниз. Заданное время может составлять, например, 2-3 с.
Альтернативно, в случае детектирования средством детектирования нагрузки, при осуществлении режима облегченного подъема, нагрузки, по существу, равной нагрузке, детектированной данным средством в первом, калибровочном режиме как приложенной к компоненту приложения тягового усилия, механизм управления способен перевести генератор тягового усилия в четвертый режим, режим падения или спуска, в котором генератор тягового усилия остановлен, средство приложения подъемного усилия не прилагает, посредством генератора тягового усилия, никакого подъемного усилия к компоненту для приложения тягового усилия, а пользователь удерживается в постоянном положении компонентом для приложения тягового усилия.
В группе вариантов аппарат по изобретению является аппаратом для облегчения лазания. В случае детектирования средством детектирования нагрузки, при осуществлении указанного второго режима, нагрузки, по существу, равной нагрузке, детектированной данным средством в первом, калибровочном режиме как приложенной к веревке, механизм управления способен перевести барабан в четвертый режим, режим падения или спуска, в котором барабан остановлен, средство приложения подъемного усилия не прилагает никакого подъемного усилия к веревке посредством барабана, а пользователь удерживается веревкой в постоянном положении.
В качестве другой альтернативы, если аппарат для облегчения подъема функционирует во втором режиме, режиме облегченного подъема, а средство детектирования нагрузки детектирует нагрузку, по существу, равную нагрузке, детектированной данным средством в первом, калибровочном режиме как приложенную к компоненту для приложения тягового усилия, средство приложения подъемного усилия может обеспечить снижение оказываемой поддержки, т.е. подъемного усилия, почти до 0%. Должно быть понятно, что подъемное усилие, приближающееся к 0 кгс, соответствует подъемному усилию, способному поднять вес компонента для приложения тягового усилия и преодолеть любое трение в системе.
При таком выполнении объект, такой как пользователь, всегда защищен от падения или иного непроизвольного спуска.
При прекращении поддержки подъема в форме подъемного усилия, т.е. при деактивации режима облегченного подъема, пользователь, чтобы активировать указанный режим, должен повторить первый, калибровочный режим.
Альтернативно, пользователь может продолжить подъем без поддержки. Более конкретно, механизм управления способен переключить генератор тягового усилия в третий режим, режим необлегченного подъема, в котором генератор тягового усилия сначала воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия, а средство приложения подъемного усилия не прилагает, посредством генератора тягового усилия, никакого подъемного усилия к компоненту для приложения тягового усилия. Другими словами, средство приложения подъемного усилия обеспечивает приложение подъемного усилия, способного поднять вес компонента для приложения тягового усилия и преодоления любого трения в системе.
Должно быть понятно, что подъемное усилие, прикладываемое в режиме необлегченного подъема, равно 0 кгс, причем средство приложения подъемного усилия в третьем режиме остается неактивным, пока пользователем не будет инициирован первый, калибровочный режим.
Пользователь может в любой момент принять решение о переключении аппарата в третий режим, режим необлегченного подъема. В результате пользователь может подсоединиться к компоненту для приложения тягового усилия, например пристегнуться к веревке аппарата, и двигаться, без ограничений, вперед и назад на уровне пола или на любом промежуточном горизонтальном уровне и/или вверх и вниз. Если затем пользователь решит начать подъем из своего текущего положения, аппарат будет функционировать в режиме необлегченного подъема, обеспечивая в процессе подъема защиту от падения. Аппарат инициирует режим облегченного подъема только после того, как пользователь успешно завершит первый, калибровочный режим.
В случае детектирования средством детектирования нагрузки, при осуществлении указанного режима необлегченного подъема, нагрузки, по существу, равной нагрузке, детектированной указанным средством детектирования нагрузки в первом, калибровочном режиме как приложенной к компоненту приложения тягового усилия, механизм управления способен перевести генератор тягового усилия в четвертый режим, режим падения или спуска, в котором генератор тягового усилия остановлен, средство приложения подъемного усилия не прилагает, посредством генератора тягового усилия, никакого подъемного усилия к компоненту для приложения тягового усилия, а пользователь удерживается компонентом для приложения тягового усилия в постоянном положении.
При таком выполнении пользователь всегда защищен от падения или иного непроизвольного спуска.
После падения аппарат может, по истечении заданного периода, переключиться в первый, калибровочный режим. Это обусловлено тем, что падение имитирует операции калибровки. Пользователь может деактивировать режим калибровки и произвести спуск на пол или на другой промежуточный горизонтальный уровень.
Деактивация режима калибровки может быть произведена, например, посредством дистанционного управления.
Альтернативно, после падения механизм управления может переключить генератор тягового усилия в пятый режим, в котором производится реверсирование генератора тягового усилия, так что пользователь может произвести спуск в безопасное положение.
В ряде вариантов пятый режим инициируется по истечении заданного периода после падения. Более конкретно, заданный период может составлять от 1 до 10 с.
Пользователь может в любой момент инициировать первый, калибровочный режим, приложив нагрузку к средству детектирования нагрузки. Он может сделать это, находясь на уровне пола (или на любом промежуточном горизонтальном уровне), например, ухватившись за веревку и оторвав свои ноги от пола. Альтернативно, пользователь может подняться на несколько шагов от исходного положения, а затем повиснуть на веревке.
Аппарат для облегчения подъема может быть также сконфигурирован с возможностью детектировать остановку (паузу) в движении пользователя. При этом механизм управления может, в случае детектирования паузы или остановки в движении пользователя, переводить барабан в указанный режим необлегченного подъема, в котором барабан способен предотвращать слабину веревки между пользователем аппаратом и барабаном, а средство приложения подъемного усилия прекращает прилагать, посредством барабана, подъемное усилие к веревке.
Когда облегчение подъема (в форме подъемного усилия) прекращается, чтобы повторно активировать второй режим, режим облегченного подъема, пользователь должен повторить первый, калибровочный режим. Альтернативно, пользователь может продолжить подъем без поддержки. При этом механизм управления может переключить генератор тягового усилия в третий режим (режим необлегченного подъема), в котором генератор тягового усилия сначала воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия. Должно быть понятно, что подъемное усилие, приложенное в режиме необлегченного подъема, составит 0 кгс, а коэффициент а облегчения нагрузки будет равен 0%.
Альтернативно, средство приложения подъемного усилия является неактивным в четвертом режиме.
Согласно своему третьему аспекту изобретение обеспечивает создание системы для облегчения подъема, содержащей:
генератор тягового усилия;
компонент для приложения тягового усилия, функционально связанный с генератором тягового усилия и выполненный с возможностью приложения, при использовании системы, тягового усилия к объекту,
и механизм управления, содержащий средство детектирования нагрузки, электронную систему управления/диагностики и средство приложения подъемного усилия и выполненный с возможностью управления генератором тягового усилия в первом, калибровочном режиме, в котором генератор тягового усилия остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной объектом к компоненту для приложения тягового усилия, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах.
При этом механизм управления выполнен с возможностью переключать генератор тягового усилия во второй режим, режим облегченного подъема, в котором генератор тягового усилия воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия, а средство приложения подъемного усилия выполнено с возможностью приложения указанного определенного подъемного усилия к компоненту для приложения тягового усилия, посредством генератора тягового усилия, которое облегчает объекту подъем.
В данной системе средство детектирования нагрузки выполнено с возможностью детектировать, при осуществлении указанного режима облегченного подъема, вес объекта, приложенный к компоненту для приложения тягового усилия, и переключать генератор тягового усилия в четвертый режим, режим падения или спуска, в котором генератор тягового усилия остановлен, объект удерживается средством приложения тягового усилия, а электронная система управления/диагностики обеспечивает мониторинг функционирования генератора тягового усилия и механизма управления и, при обнаружении неисправности, переключение генератора тягового усилия в пятый, аварийный режим.
В особенно предпочтительных вариантах указанный объект содержит пользователя, которым могут быть, в частности, человек и/или животное. Альтернативно или дополнительно, объект может содержать снаряжение, инструменты или любой другой неодушевленный предмет.
В вариантах согласно третьему аспекту генератор тягового усилия может содержать один или более механизированных барабанов, талей, монтажных лебедок, кабестанов, шкивов, противовесов и/или механизированных подъемников. Механизированный подъемник может являться, например, рычажным подъемником. Таким образом, генератор тягового усилия способен генерировать усилие, воздействующее на другое устройство и/или объект.
В некоторых вариантах компонент для приложения тягового усилия может содержать веревку. Должно быть понятно, что термин "веревка" включает также шнуры любых типов, способные выдерживать нагрузку. Кроме того, веревка может быть изготовлена из природных или синтетических волокон, тканой ленты или ремня, стальной проволоки или стального троса, кабеля и т.д. В этих вариантах объект предпочтительно прикрепляется (пристегивается) к веревке. Компонент для приложения тягового усилия связан с генератором тягового усилия таким образом, чтобы получать от него тяговое усилие, которое затем данный компонент может прикладывать к объекту.
В вариантах, в которых генератор тягового усилия является механизированным барабаном, а компонент для приложения тягового усилия - веревкой, веревка предпочтительно прикреплена к барабану и, при использовании системы, к объекту. В группе вариантов система представляет собой систему для облегчения лазания. Более конкретно, система для облегчения лазания содержит:
механизированный барабан;
веревку, прикрепленную к барабану и, при использовании устройства, прикрепляемую к объекту,
и механизм управления, содержащий средство детектирования нагрузки, электронную систему управления/диагностики и средство приложения подъемного усилия и выполненный с возможностью управления механизированным барабаном в первом, калибровочном режиме, в котором барабан остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной к веревке, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к веревке барабаном, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl -детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах.
При этом механизм управления выполнен с возможностью переключать барабан во второй режим, режим облегченного подъема, в котором барабан обеспечивает предотвращение слабины веревки между пользователем системой и барабаном, а средство приложения подъемного усилия выполнено с возможностью приложения к веревке, посредством барабана, подъемного усилия, обеспечивающего, в заданной степени, облегчение подъема для пользователя.
В данной системе средство детектирования нагрузки выполнено с возможностью детектировать, при осуществлении режима облегченного подъема лазанием, вес пользователя, приложенный к веревке, и переводить барабан в четвертый режим, режим падения или спуска, в котором барабан остановлен, пользователь зависает на веревке, а электронная система управления/диагностики обеспечивает мониторинг функционирования механизированного барабана и механизма управления и, при обнаружении неисправности, переключение генератора тягового усилия в пятый, аварийный режим.
В некоторых вариантах, когда средство детектирования нагрузки детектирует приложение веса указанного объекта к компоненту для приложения тягового усилия, вместо того чтобы инициировать режим падения и спуска, средство детектирования нагрузки может быть выполнено с возможностью, в случае детектирования нагрузки, равной нагрузке, детектированной данным средством в первом, калибровочном режиме как приложенной к компоненту приложения тягового усилия, переключать генератор тягового усилия в третий режим, режим необлегченного подъема. В данном режиме генератор тягового усилия сначала воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия, а средство приложения подъемного усилия прекращает прилагать, посредством генератора тягового усилия, подъемное усилие к компоненту для приложения тягового усилия.
При таком выполнении пользователь удерживается на натянутой веревке (что предотвращает его падение), поскольку в режиме необлегченного подъема генератор тягового усилия обеспечивает предотвращение слабины веревки между объектом, использующим систему, и генератором тягового усилия, тогда как средство приложения подъемного усилия прекращает прилагать, посредством генератора тягового усилия, подъемное усилие к компоненту для приложения тягового усилия.
Альтернативно, средство детектирования нагрузки может быть выполнено с возможностью, в случае детектирования нагрузки, равной нагрузке, детектированной данным средством в первом, калибровочном режиме как приложенной к компоненту приложения тягового усилия, воздействовать на средство приложения подъемного усилия так, чтобы это средство уменьшило коэффициент а облегчения нагрузки, обеспечиваемый средством приложения тягового усилия, до значения, близкого к 0%. В результате реальное подъемное усилие будет уменьшено, по существу, до 0 кгс, хотя система останется в режиме облегченного подъема.
В случае обнаружения неисправности при осуществлении пятого, аварийного режима, для обеспечения дальнейшей работы системы может потребоваться ее перенастройка.
Согласно своему четвертому аспекту изобретение предлагает способ облегчения пользователю подъема в условиях работы на высоте. Данный способ включает следующие операции:
обеспечение наличия веревки;
детектирование нагрузки, приложенной к веревке в первом направлении;
выбор уровня, обеспечиваемого пользователю облегчение подъема;
определение подъемного усилия в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах, и
приложение подъемного усилия во втором направлении, чтобы уравновесить нагрузку, приложенную к веревке в первом направлении.
Способ может дополнительно включать одну или более из следующих операций: выдачу пользователю, пристегнутому к веревке, сигнала о завершении определения подъемного усилия; обеспечение заданной временной задержки между операциями определения подъемного усилия как доли детектированной нагрузки, приложенной к веревке; приложение подъемного усилия для уравновешивания нагрузки, приложенной к веревке, и снятие подъемного усилия в качестве реакции на изменение детектированной нагрузки, приложенной к веревке.
Далее будут описаны различные варианты изобретения, признаки которых могут соответствовать признакам первого, второго, третьего и/или четвертого аспектов изобретения. Хотя различные варианты описываются применительно к облегчению подъема лазанием, из нижеследующего описания должно быть понятно, что рассматриваемые варианты применимы к любым видам подъема и/или спуска объекта, такого как человек-пользователь.
Генератор тягового усилия предпочтительно приводится в действие от ручного привода автоматически или посредством любого иного подходящего средства.
В ряде вариантов желательно, чтобы генератор тягового усилия приводился в действие электродвигателем или иным аналогичным устройством. Альтернативно, генератор может приводиться в действие от ручного привода или каким-то автоматическим источником энергии.
В группе вариантов генератором тягового усилия является барабан, приводимый в действие электродвигателем.
Альтернативно, механизированный барабан может приводиться в действие от ручного привода или каким-то автоматическим источником энергии.
В некоторых вариантах изобретения во втором режиме, режиме облегченного подъема, и/или в третьем режиме, режиме необлегченного подъема, механизм управления выдает генератору тягового усилия команду воздействовать на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектируемая средством детектирования нагрузки, не станет, по существу, равной весу данного компонента.
В вариантах, соответствующих, в частности, третьему аспекту изобретения, механизм управления может управлять, посредством электронной системы управления/диагностики, генератором тягового усилия так, чтобы он воздействовал на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектируемая средством детектирования нагрузки, не станет, по существу, равной весу данного компонента. Когда нагрузка, детектируемая средством детектирования нагрузки, станет, по существу, равной весу данного компонента в режиме необлегченного подъема, генератор тягового усилия получает команду остановиться. Если же нагрузка, детектируемая средством детектирования нагрузки, станет, по существу, равной весу данного компонента в режиме облегченного подъема, сначала генератор тягового усилия также получает команду остановиться. Однако средство приложения подъемного усилия продолжает прилагать, через генератор тягового усилия, подъемное усилие к компоненту для приложения тягового усилия.
Так, в некоторых вариантах изобретения при осуществлении второго режима, режима облегченного подъема, и/или третьего режима, режима необлегченного подъема, механизм управления обеспечивает предотвращение слабины веревки, выдавая барабану команду сматывать веревку при обнаружении ее провисания.
В частности, в вариантах согласно третьему аспекту изобретения механизм управления может предотвращать провисание веревки, выдавая барабану посредством электронной системы управления/диагностики соответствующую команду (сматывать веревку при обнаружении ее провисания). В некоторых вариантах электронная система управления/диагностики может быть сконфигурирована с возможностью определять ситуации, когда слабина веревки создается по инициативе пользователя, пытающегося вручную отмотать веревку, не прилагая к ней нагрузки. В этих вариантах пользователь может отмотать веревку до некоторого предела, после чего система обнаружит наличие провисания.
В ряде вариантов электронная система управления/диагностики может быть сконфигурирована с возможностью предотвращать сматывание веревки барабаном, если в течение заданного времени детектируется нагрузка, меньшая порогового значения. Таким образом, если измеренная нагрузка оказывается меньше заданного порога, система будет сматывать веревку только короткое время, чтобы веревка не оказалась убранной от пользователя в случае, если он забыл прикрепить ее к чему-нибудь после того, как прекратил пользоваться ею. Эта ситуация может быть обнаружена по плавности сматывания веревки. Если система обнаруживает постоянное усилие при сматывании веревки в течение некоторого времени, не характерного для лазания, наматывание веревки на барабан будет остановлено через определенный промежуток времени.
В режиме необлегченного подъема после выборки слабины барабан получит команду остановиться. В режиме облегченного подъема после выборки слабины барабан тоже получит команду остановиться, но средство приложения подъемного усилия продолжает прикладывать подъемное усилие к веревке через барабан.
Если веревка получает легкое натяжение, например, если пользователь осуществляет контролируемый спуск, барабан может получить команду выдавать веревку. В режиме падения и спуска, когда к веревке приложен полный вес пользователя, барабан получает команду остановиться. После этого может быть инициировано разматывание веревки, чтобы опустить пользователя на землю одним из способов, описанных далее. В аварийном режиме барабан останавливается и выдается тревожный сигнал.
В аварийном режиме аппарат и система по изобретению будут держать барабан остановленным до устранения неисправности или до перехода в другой режим.
В случае обнаружения некатастрофической неисправности (например, в случае рассогласования показаний датчиков или отключения энергопитания) будет активирован режим "вынужденного возврата", в котором включается источник бесперебойного питания. Этот режим отключает все сложные функции системы (в том числе облегчение подъема) и включает все звуковые источники тревожной сигнализации для информирования пользователя о необходимости вернуться на безопасный уровень и произвести проверку системы. При ее наличии электронная система управления/диагностики принимает входные сигналы от всех оставшихся действующими частей механизма управления, включая датчики.
В ряде вариантов электронная система управления/диагностики осуществляет управление питанием барабана, реагируя на сигналы от остальных частей механизма управления. В типичном варианте барабан получает энергию от трехфазного электродвигателя, а электронная система управления/диагностики управляет инвертором, который, в свою очередь, управляет скоростью и направлением вращения двигателя и, следовательно, барабана. Кроме того, система управления/диагностики выполняет функцию диагностики. Эта функция может быть реализована на различных уровнях. С системой управления/диагностики могут быть связаны сенсоры, например микровыключатели или потенциометры, как это будет описано дальше. Их сигналы могут сравниваться друг с другом, причем любое расхождение инициирует аварийный режим. Аналогично, входные сигналы инвертора могут сравниваться с его выходными сигналами, чтобы, в случае необходимости, инициировать аварийный режим. На вход системы диагностики могут подаваться сигналы и от других датчиков, например независимо детектирующих движение барабана. В механизме управления могут иметься и дополнительные, "избыточные" датчики для целей перекрестной проверки. Функция диагностики вносит важный дополнительный вклад в безопасность работы аппарата для облегчения подъема. Хотя риск сбоя в системе управления может быть небольшим, последствия могут быть серьезными, потенциально приводящими к серьезным повреждениям или даже к гибели пользователя. Например, если барабан, в результате неисправности, бесконтрольно выдает веревку, пользователь может оказаться лишенным защиты на опасной высоте. В связи с этим представляется маловероятным, что аппарат по изобретению для облегчения лазания, не имеющий подобающей системы самодиагностики, сможет получить разрешение на использование от соответствующего контрольного органа.
Предпочтительно выполнить систему управления/диагностики программируемой.
Желательно, чтобы инвертор, управляющий скоростью и направлением вращения барабана, также был программируемым. Программируемые система управления и инвертор обеспечивают возможность встраивания в систему управления самых различных функций, а также оперативное управление скоростью и направлением вращения барабана с практически бесконечными возможностями. Это позволит изменять функционирование аппарата и системы по изобретению для облегчения подъема в соответствии с условиями и характером их применения (как это будет описано далее) просто путем перепрограммирования электронной системы управления/диагностики.
Представляется очевидным, что термин "веревка" включает также шнуры любых типов, способные выдерживать нагрузку. Кроме того, веревка может быть изготовлена из природных или синтетических волокон, тканой ленты или ремня, стальной проволоки или стального троса, кабеля и т.д. При этом желательно, чтобы устройство для калибровки нагрузки, аппарат и система для облегчения подъема могли использоваться индивидуально или в совокупности с обычной веревкой для скалолазания (далее - рабочая веревка), чтобы условия лазания при использовании изобретения точно воспроизводили лазание с партнером с применением таких же веревок.
Механизм управления может быть сконструирован или запрограммирован таким образом, чтобы в режимах облегченного и необлегченного подъемов барабан сматывал веревку, как только у нее появляется слабина, а также выдавал веревку в случаях легкого натяжения, усилие которого меньше веса пользователя. Такой вариант постоянно поддерживает правильный натяг веревки при лазании, например, с верхней или нижней страховкой, в то же время позволяя пользователю выбрать столько веревки, сколько требуется для свободы движения.
Однако для большей безопасности, особенно если пользователь неопытен, может оказаться желательным несколько ограничить возможности барабана. Так, при лазании с верхней страховкой в режимах облегченного и необлегченного лазания может предусматриваться только сматывание веревки, которое затем просто прекращается, т.е. веревка не разматывается в условиях небольшого натяжения. Такой способ функционирования предотвращает отбор пользователем значительного количества веревки от барабана, что могло бы привести к недостаточной защите пользователя в случае падения.
Из соображений безопасности в вариантах изобретения, в которых механизм управления управляет барабаном различным образом в случае лазания с верхней или нижней страховкой, аппарат для облегчения подъема предпочтительно снабжается средством обеспечения безопасности, таким как обычный замок с ключом или электронный кодовый замок, который предотвращает попытки его применения способом, не совместимым с используемым вариантом лазания (с верхней или нижней страховкой).
Если при лазании некоторая часть веревки была размотана с барабана и веревка является ненатянутой, она должна быть снова смотана на барабан для последующего использования. Было обнаружено, что, если только не создать в веревке при наматывании некоторое натяжение, она в таких ситуациях может наматываться неплотно. Подобные свободные (неплотные) витки могут цепляться за механические части аппарата для облегчения подъема, нарушая этим его правильное и безопасное функционирование. Поэтому аппарат по изобретению может быть дополнительно снабжен прижимным роликом, выполненным с возможностью прикладывать нагрузку между веревкой, наматываемой на барабан, и барабаном. Узел прижимного ролика функционирует только при выборе специального режима сматывания, чтобы не создавать помех нормальному функционированию механизма управления, которое зависит от натяжения веревки. Наличие прижимного ролика способствует также наматыванию веревки на барабан требуемым образом в виде регулярных последовательных слоев.
В необходимых случаях, например, когда в аппарате для облегчения подъема используется очень длинная веревка, особенно тонкая веревка, такая как стальной кабель, аппарат может быть дополнительно оснащен механизмом раскладки, улучшающим управление формированием слоев веревки на барабане. Хорошо известны также устройства, самостоятельно обеспечивающие раскладку при сматывании больших длин кабеля или веревки. Подобное устройство может, например, содержать направляющую, которая натягивает веревку и движется в процессе намотки вперед и назад по ширине барабана, чтобы позиционировать витки веревки в процессе их намотки на барабан.
При работе аппарата по изобретению обеспечивается поддержание веревки натянутой. При лазании с верхней страховкой механизм управления включает двигатель барабана, чтобы смотать веревку, как только веревка провиснет, т.е. окажется ненатянутой. Это эффективно моделирует ситуацию, в которой пользователь имеет партнера, поддерживающего веревку натянутой, чтобы гарантировать, что в случае падения пользователь не пролетит в свободном падении сколько-нибудь значительное расстояние прежде, чем будет удержан. В случае падения механизм управления согласно изобретению переключается в режим падения и обеспечивает остановку барабана.
Если барабан приводится во вращение двигателем, подключенным через зубчатую передачу, то в зависимости от передаточного отношения в цепи, включающей двигатель и зубчатую передачу, пользователь может оказаться "подвешенным" на веревке вблизи точки, в которой произошло падение, или же вес пользователя окажется достаточным для проворачивания барабана, зубчатой передачи и двигателя, что приведет к медленному опусканию пользователя вниз. Предпочтительно выбирается вариант, когда пользователь удерживается вблизи точки, в которой он упал. В этом случае упавший пользователь может просто продолжить подъем лазанием, вернувшись на поверхность, по которой он поднимался, чтобы продолжить лазание, или с помощью пульта дистанционного управления активировать последовательность действий по спуску, как это будет описано далее, чтобы опуститься на землю при подаче питания на барабан. Нетрудно понять, что веревка не должна разматываться с барабана, когда пользователь поднимается лазанием по соответствующей поверхности или неподвижен, т.е. стоит на поверхности, на которую он должен подняться (далее - рабочая поверхность), или удерживается на ней. Такие положения не должны приводить к ситуации, когда веревка провисает, так что пользователь не будет должным образом защищен в случае падения. Соответственно, в нормальных условиях механизм управления разрешает спуск, только если пользователь натянет веревку своим весом.
Механизм управления согласно изобретению предпочтительно содержит также таймер, по истечении заданного периода автоматически активирующий действия по безопасному опусканию пользователя на землю, если к веревке приложен вес пользователя.
Такой режим автоматического опускания, по истечении заданного периода, пользователя, который натягивает веревку своим весом, особенно удобен при обучении лазанию детей или новичков. От них не требуется пользоваться дистанционным управлением, чтобы спуститься после того, как они затратили определенное время, пытаясь произвести подъем. Поскольку опускание происходит медленно и контролируемым образом, они могут, если захотят, снова закрепиться на рабочей поверхности без ухудшения безопасности. Процесс опускания прекращается немедленно, как только веревка перестанет натягиваться полным весом пользователя, и механизм управления переходит в нормальный режим поддерживания веревки натянутой. По желанию, указанный период может быть сделан нулевым, чтобы опускание начиналось, как только веревка окажется натянутой весом пользователя.
Аппарат по изобретению предпочтительно содержит пульт дистанционного управления для активирования аппарата с приходом его в первый, второй или третий режим и для выдачи механизму управления команды начать разматывание веревки для осуществления спуска, когда аппарат находится в четвертом режиме. Пульт дистанционного управления предпочтительно является беспроводным. Может иметься также дубликат этого пульта, который может обеспечивать проводную или беспроводную связь, позволяя помощнику, в случае необходимости, управлять системой, например, в аварийной ситуации. Пользователь обычно хранит пульт дистанционного управления в удобном месте, прикрепленным к своему снаряжению или одежде. При этом отпадает необходимость в наличии партнера или помощника на любой стадии подъема. Пульт дистанционного управления может быть программируемым, чтобы пользователь мог остановиться во время опускания. Такая возможность позволяет пользователям снова закрепиться на выбранном месте стены, чтобы возобновить подъем. Она полезна и в промышленных применениях, в которых требуется обеспечить позиционирование точно в требуемом месте.
Должно быть понятно, что в некоторых обстоятельствах, например при обслуживании искусственной рабочей поверхности, было бы полезно иметь возможность использовать барабан в качестве подъемника для подъема человека, выполняющего работу по обслуживанию. В подобных случаях подъемное усилие может превышать 100%. Для этих условий нормальное "отказоустойчивое" функционирование барабана может быть отменено, например вводом ключа или кода в пульт дистанционного управления, что сделает доступным для механизма управления дополнительный режим принудительного подъема, позволяющий аппарату по изобретению проводить сматывание под нагрузкой (при натянутой веревке). Применение аппарата по изобретению в качестве подъемника может быть полезно во многих промышленных применениях. При использовании механизированного барабана (с достаточным крутящим моментом) аппарат по изобретению может применяться для подъема различных грузов, таких как стройматериалы, тогда как второй такой аппарат может нести пользователя, который должен использовать эти материалы. При этом, когда это требуется, пользователь также может быть поднят аппаратом по изобретению непосредственно в нужное положение. Из соображений безопасности желательно, чтобы при подъеме пользователя использовались две веревки. При использовании двух веревок желательно, чтобы барабан аппарата для облегчения подъема был разделен на две сматывающие секции, каждая из которых может работать с отдельной веревкой. При таком выполнении обе веревки обслуживаются одним аппаратом для облегчения подъема. Альтернативно, можно использовать два аппарата согласно изобретению, каждый из которых работает с веревкой, связанной с принудительно поднимаемым пользователем. При применении двух аппаратов они могут быть установлены на различных углах стены здания. Это обеспечит "пользователю" возможность быть поднятым к любой точке по высоте и ширине стены здания за счет задания соответствующих длин веревок, наматываемых на каждый из двух пространственно разнесенных барабанов. Чтобы предотвратить неправильное использование аппарата, в частности подъем людей на большие высоты (с возникновением потенциально опасных ситуаций), функция подъемника людей ограничена тем, что подъем осуществляется дискретными отрезками (обычно в течение 1 с). Такой режим является приемлемым для помощи в аварийных ситуациях, но неудобным для перемещения на большое расстояние.
При применении аппарата для облегчения подъема в качестве коммерческого подъемника система дистанционного управления также может быть снабжена таймером, что позволит пользоваться аппаратом в течение оплаченного времени. Альтернативно или дополнительно, сам механизм управления может быть снабжен таймером, делающим возможным такое использование аппарата в течение оплаченного времени.
Хотя при использовании для лазания с верхней страховкой аппарат для облегчения подъема может быть установлен на верхнем краю рабочей поверхности, так что веревка отходит от него вниз, еще более удобно установить его на земле или на промежуточной высоте. Возможность применения барабана при лазании с верхней страховкой обеспечивается в этом случае перекидыванием веревки через шкив, установленный над рабочей поверхностью. Установка барабана у нижней точки подъема обеспечивает удобный доступ к нему для обслуживания, позволяя в то же время применять его при лазании с нижней страховкой. В некоторых ситуациях, например, когда аппарат для облегчения подъема предназначен для обеспечения безопасности пользователю, работающему на наружной поверхности здания, этот аппарат может быть установлен с возможностью перемещения по направляющим или рельсам (монорельсу). Такая схема может быть реализована и в спортивном сооружении (скалодроме). В этом случае аппарат для облегчения подъема при лазании с верхней страховкой может быть установлен на рельсах, проходящих по верхнему краю рабочей поверхности (стены) или сооружения.
При этом аппарат для облегчения подъема может быть перемещен в любое желательное положение.
Аппарат для облегчения подъема, установленный на направляющую (рельсы), может легко перемещаться, например на колесах, по заданной траектории, например вдоль верхнего края здания. Это обеспечит доступ, с помощью аппарата для облегчения подъема, к любой части стены здания. По желанию, движением аппарата по направляющим можно управлять дистанционно. Если окажется необходимым движение пользователя по заданной траектории, возможно, на изменяющейся высоте, аппарат для облегчения подъема может быть запрограммирован на движение по направляющей и на сматывание или разматывание веревки, обеспечивающие требуемую траекторию. Для других применений, таких как уход за деревьями, обслуживание ветротурбин или аналогичных сооружений или другие верхолазные работы, аппарат по изобретению, для придания ему мобильности, может быть легко смонтирован на грузовике или ином транспортном средстве.
При использовании нижней страховки рабочая веревка поддерживается натянутой и разматывается только во время подъема пользователя, причем к веревке прикладывается некоторое натяжение. Если пользователь сорвется, механизм управления переключит барабан в режим падения и спуска, так что пользователь сразу же окажется удерживаемым веревкой, отходящей от самой верхней из использованных точек страховки, после чего он может быть опущен на землю с заданной (безопасной) скоростью, как это происходит при лазании с верхней страховкой. При лазании с нижней страховкой особенно важно обеспечить качественное управление натяжением веревки и операциями ее сматывания/ разматывания посредством барабана. В отличие от лазания с верхней страховкой механизм управления должен позволять пользователю отматывать какую-то длину веревки с барабана, чтобы часть веревки можно было, в процессе подъема, поднять для защелкивания на следующей точке страховки (такой как временный или постоянный рым-болт или оттяжка). Процесс "отматывания" веревки должен производиться быстро, примерно с удвоенной скоростью по сравнению с нормальным функционированием аппарата. Однако этот процесс не должен запускать механизм преодоления установленных параметров, который мог бы вызвать отматывание на слишком большую длину или остановить работу барабана. Аналогично, после того как веревка была прищелкнута к следующей точке страховки, аппарат должен произвести сматывание избыточной длины веревки, чтобы вернуться к прежнему ее натягу. Испытания показали, что описанная электронная система управления обеспечивает требуемые оптимальную безопасность и надежное функционирование при лазании с нижней страховкой.
Механизм управления может содержать: шарнир, выполненный таким образом, что при использовании аппарата для облегчения подъема механизированный барабан находится в первом положении, когда веревка не натянута, и поворачивается вокруг оси шарнира во второе положение, когда веревка находится под натяжением; по меньшей мере один выключатель для управления подачей энергии к барабану, способный активироваться в процессе использования аппарата в моменты переходов механизированного барабана между первым и вторым положениями, и механизм преодоления установленных параметров, способный активироваться в процессе функционирования аппарата для облегчения подъема, когда веревка находится под нагрузкой, по существу, равной или превышающей вес пользователя, связанного с данной веревкой, и обеспечивать барабану возможность разматывания веревки.
Предпочтительно шарнир позволяет механизированному барабану поворачиваться вокруг горизонтальной оси. Желательно расположить шарнир вблизи точки равновесия для барабана и связанного с ней двигателя (но не в этой точке). В таком случае барабан будет наклонен относительно горизонтального положения, как правило, опираясь на опору (или землю) одним своим концом. Когда веревка натягивается, барабан переходит из первого положения во второе и возвращается в первое положение под действием силы тяжести, когда веревка провисает.
Должно быть понятно, что возможны и другие варианты механизма управления согласно изобретению. Так, если барабан под действием натяжения веревки поворачивается вокруг вертикальной оси, возврат барабана в его первое положение при снятии натяжения может обеспечиваться под действием силового компонента, такого как пружина.
Выключатель или выключатели для управления функционированием барабана могут являться микровыключателями, установленными у точки контакта конца барабана с опорой или землей. При повороте (качании) барабана микровыключатель срабатывает под действием давления со стороны барабана, контактирующего с опорой или землей. Альтернативно, в механизме управления можно использовать и другие выключатели, например срабатывающие при наклоне.
При лазании с верхней страховкой срабатывание выключателей используется, чтобы запустить сматывание веревки, когда она не натянута и барабан находится в первом положении. Когда веревка натянута, а барабан переходит во второе положение, выключатель (выключатели) обеспечивает (обеспечивают) остановку барабана. Чтобы осуществить плавную работу с непрерывным сматыванием веревки, когда пользователь поднимается лазанием, и почти немедленную остановку, когда пользователь делает паузу, желательно, чтобы диапазон поворота барабана в шарнире был малым, составляя в типичном варианте всего 5 мм.
При лазании с нижней страховкой выключатели управляют другой операцией. Веревка разматывается, будучи слегка натянутой, и останавливается при появлении слабины или при натяжении, по существу, равном или превышающем вес пользователя. Механизм преодоления установленных параметров срабатывает, когда к веревке приложен вес пользователя, т.е. когда аппарат для облегчения подъема был переключен в режим падения и спуска. В этой ситуации опускание пользователя на землю может быть желательным или необходимым. Механизм преодоления установленных параметров посылает сигнал в электронную систему управления/диагностики, которая может дать разрешение на спуск, например, если он разрешен таймером или задан с пульта дистанционного управления, имеющегося у пользователя (как это было описано выше).
Механизм преодоления установленных параметров может содержать силовой компонент, препятствующий срабатыванию выключателя (микровыключателя) до тех пор, пока к веревке не будет приложен по меньшей мере вес пользователя и созданное им натяжение не переведет барабан из исходного положения в положение, в котором срабатывает выключатель. Такой силовой компонент может, например, содержать пружину сжатия или противовес.
Могут использоваться и альтернативные механизмы преодоления установленных параметров. Например, освобождение барабана для разматывания веревки может быть инициировано после того, как электронный датчик нагрузки или тензодатчик детектирует нагрузку, приложенную к узлу барабан-веревка. При использовании электродвигателя для приведения в действие барабана можно использовать электронный мониторинг нагрузки на двигатель.
Предпочтительно механизм управления дополнительно содержит устройство дистанционного управления для подачи питания для вращения барабана и для отключения нормального режима механизма управления, когда это требуется, например для его обслуживания, как это было описано раньше.
Механизм управления предпочтительно содержит рычаг (рычажный узел), приводимый в действие, в процессе функционирования аппарата, веревкой, и средство воздействия на рычаг. Рычаг и указанное средство выполнены таким образом, что при использовании аппарата для облегчения подъема рычаг удерживается указанным средством в первом положении, пока веревка не находится под натяжением, и переходит во второе положение, когда веревка натягивается. Механизм управления содержит также по меньшей мере один выключатель для управления питанием для барабана, срабатывающий при переходах рычага между своими первым и вторым положениями, и механизм преодоления установленных параметров, который активируется, когда веревка находится под натяжением, по существу, равным или превышающим вес пользователя, связанного с этой веревкой, и который, в процессе работы аппарата, позволяет барабану разматывать веревку до тех пор, пока натяжение не уменьшится.
Выключатель или выключатели, срабатывающий (срабатывающие) при повороте рычага, могут являться, например, микровыключателями, которые активируются при контакте с рычагом. В качестве альтернативы микровыключателям можно применить потенциометр. Потенциометр, который может быть установлен на подшипнике барабана, реагирует на движения рычага, чтобы обеспечить постоянную обратную связь в отношении положения и/или движения рычага для программируемой электронной системы управления. Такая схема позволяет уменьшить количество подвижных частей одновременно с повышением чувствительности к движению рычага.
В качестве средства воздействия на рычаг можно применить, например, груз или грузы, обеспечивающий (обеспечивающие) удерживание рычага в первом положении. Целесообразно настраивать чувствительность механизма управления для различных ситуаций варьированием количества или весов установленных грузов. При испытаниях аппарата по изобретению в варианте с рычажным узлом было обнаружено, что вес груза, оптимальный применительно к различным ситуациям подъема, может существенно варьироваться (в случае протестированного оборудования от 1 кгс до 9 кгс), например, в зависимости от трения, которое испытывает веревка, проходящая по рабочей поверхности и через промежуточные точки страховки. Как альтернативу грузам, средство воздействия на рычаг может содержать исполнительный компонент с электроприводом, натягивающий воздействующий компонент, например пружину, которая создает варьируемую нагрузку на рычаг. Преимущество такого варианта в том, что он легко настраивается для обеспечения нагрузки на рычаг, оптимальной для конкретной ситуации. Когда пользователь готовится к подъему на стену или иное препятствие, он может управлять контроллером (например, поворачивая шкалу), чтобы постепенно увеличивать нагрузку, прилагаемую к рычагу исполнительным и воздействующим компонентами. Как только веревка начнет подниматься под действием барабана, нагрузка на рычаг устанавливается такой, чтобы компенсировать трение, испытываемое веревкой. Если исполнительный и воздействующий компоненты используются для создания варьируемой нагрузки на рычаг, описанное применение потенциометра для определения положения рычага является особенно желательным. Для управления исполнительным компонентом с целью приложения к рычагу, через воздействующий компонент, возрастающей нагрузки может быть применена электронная система управления/диагностики.
В качестве альтернативы схеме, в которой двигатель приводит барабан во вращение непосредственно через зубчатую передачу, в приводную цепь может быть введен муфтовый механизм. Так, двигатель может через зубчатую передачу постоянно приводить во вращение вал, к которому барабан подсоединяется только при активации муфтового механизма, например электромагнитной муфты. Чтобы управлять работой муфты, в данном варианте может использоваться, например, механизм управления, содержащий уже описанные рычаг и средство воздействия на него.
Такой вариант применим при лазании как с верхней, так и с нижней страховкой.
При лазании с верхней страховкой, когда веревка не натянута, механизм управления активирует муфту, и барабан сматывает веревку. Когда веревка натягивается, муфта отсоединяется от приводного вала, что приводит к остановке барабана.
При лазании с нижней страховкой, когда веревка находится под натяжением (недостаточным для активации механизма преодоления установленных параметров), муфта соединена с приводным валом, чтобы обеспечить выдачу веревки. Когда веревка не натянута, муфта отсоединяется от вала, и сматывание прекращается.
Поскольку барабан в этом случае не связан непосредственно с зубчатой передачей, у двигателя нет ограничений на вращение для быстрой выдачи веревки, когда веревка нагружена весом пользователя. Поэтому, чтобы предотвратить неуправляемый спуск после срабатывания (в результате приложения к веревке веса пользователя) выключателя, отключающего нормальный режим механизма управления, муфта получает команду быстро соединяться с приводным валом и отсоединяться от него. В результате обеспечивается медленное опускание пользователя на землю, поскольку барабан то приводится во вращение весом пользователя, то тормозится в результате кратковременного сцепления/расцепления муфты с приводным валом.
Такое выполнение является особенно предпочтительным. Оно позволяет использовать более одного барабана в комплекте с единственным двигателем. Двигатель постоянно вращает вал, к которому может подсоединяться несколько барабанов, взаимно смещенных вдоль вала, например установленных вдоль верхнего края стены для лазания с верхней страховкой. Каждый барабан, когда это требуется, соединяется с приводным валом через муфту, приводимую в действие механизмами управления, как это было описано выше. Это позволяет нескольким пользователям заниматься лазанием без необходимости иметь для каждого пользователя отдельный двигатель. Кроме того, если веревка нагружена весом пользователя, спуск осуществляется автоматически без необходимости в команде с пульта дистанционного управления.
Должно быть понятно, что признаки первого, второго, третьего и/или четвертого аспектов изобретения могут присутствовать и в вариантах, соответствующих другим аспектам изобретения.
Краткое описание чертежей
Другие предпочтительные особенности и преимущества изобретения станут ясны из нижеследующего подробного описания некоторых его вариантов, проиллюстрированных прилагаемыми чертежами.
На фиг.1 представлен простой вариант системы по изобретению для облегчения подъема при лазании с верхней страховкой.
На фиг.2а-2b схематично иллюстрируется применение системы по изобретению для облегчения лазания с верхней или нижней страховкой.
На фиг.3а-3b показан другой вариант аппарата согласно изобретению для облегчения лазания с альтернативным механизмом управления.
На фиг.4 представлен вариант системы для облегчения лазания, в которой три барабана для намотки веревки приводятся в действие единственным двигателем, с которым они связаны посредством муфтовых механизмов.
На фиг.5 представлен еще один альтернативный вариант системы для облегчения лазания.
На фиг.6 показан следующий вариант системы для облегчения лазания, снабженной механизмом с прижимным роликом.
На фиг.7а, 7b схематично иллюстрируется применение системы для облегчения лазания, обеспечивающей доступ к стене здания.
На фиг.8 представлена блок-схема, поясняющая принцип действия системы для облегчения лазания в соответствии с вариантом изобретения.
Сходные компоненты имеют одинаковые обозначения на всех чертежах.
Осуществление изобретения
На фиг.1 представлен вариант системы по изобретению для облегчения лазания. Она выполнена на основе аппарата 1 для облегчения лазания, который содержит электродвигатель 2, приводящий через зубчатую передачу 8 во вращение центральный вал 4 барабана 6. На барабан 6 намотана рабочая веревка 9 (для наглядности на фиг.1 изображены только несколько витков веревки).
Барабан, электродвигатель и зубчатая передача установлены на каркасе 10, у которого имеется рама 12, установленная на горизонтальной шарнирной оси 14, слегка смещенной относительно точки 16 равновесия аппарата. В отсутствие нагрузки, приложенной через рабочую веревку 9, каркас 10 под действием силы тяжести наклонен с приложением веса аппарата к опоре 18. Когда же веревка 9 натягивается, каркас 10 совершает качательное движение до упора во вторую опору 19.
В представленном примере аппарат 1 для облегчения лазания должен быть установлен наверху сооружения и использоваться при лазании с верхней страховкой, с выдачей веревки 9 в нижнем направлении через вырез 20 в раме 12.
Механизм 21 управления содержит электронную систему 22 управления/диагностики и инвертор 23, обеспечивающий управление электродвигателем 2. Механизм 21 управления содержит также датчик 200 нагрузки и средство приложения (задатчик) 300 подъемного усилия. При использовании системы для облегчения лазания, когда веревка 9 не натянута (т.е. провисает), каркас опирается на опору 18. При этом активирован находящийся между рамой 12 и опорой 18 микровыключатель 24, сигнал от которого поступает в электронную систему 22 управления/диагностики, и эта система может выдать команду инвертору 23 подать питание на двигатель 2, чтобы обеспечить наматывание веревки 9 на барабан 6. Когда слабина веревки 9 будет выбрана и веревка натянется, аппарат 1 для облегчения лазания совершит качательное движение вокруг оси 14 и придет в контакт со второй опорой 19. В результате этого контакта активируется второй микровыключатель 28, который выдаст в электронную систему 22 управления/диагностики сигнал на остановку двигателя 2, если пользователь использует режим необлегченного подъема.
В альтернативных вариантах микровыключатель 28 может быть заменен датчиками нагрузки/давления, по которым проходит веревка. В других вариантах аппарат по изобретению представляет собой барабан, проходящий по оси которого вал снабжен датчиком крутящего момента.
Если пользователь хочет использовать режим облегченного подъема, необходимо сначала использовать режим калибровки. Пользователь калибрует систему, прикладывая к веревке 9 свой полный вес в течение заданного периода длительностью 3-5 с. Датчик 200 нагрузки детектирует вес пользователя, а задатчик 300 подъемного усилия определяет уровень подъемного усилия, которое должно быть приложено к веревке барабаном. Значение прикладываемого подъемного усилия "hf" определяется умножением требуемого коэффициента "а" облегчения нагрузки (задаваемого в процентах) на значение "dl" детектированной нагрузки. Перед активированием системы пользователь может запрограммировать значение коэффициента "а". В типичных ситуациях это значение будет лежать между 10% и 70%. По завершении режима калибровки, когда пользователь начнет свой подъем, веревка 9 будет сматываться на барабан 6, причем микровыключатель 28 будет активирован в результате контакта рамы 12 со второй опорой. Его сигнал укажет задатчику 300 подъемного усилия, что со стороны барабана 6 к веревке 9 должно быть приложено подъемное усилие.
На второй опоре 19 размещен также механизм 30 преодоления установленных параметров, содержащий пружину сжатия и третий микровыключатель.
Когда веревка 9 перестает испытывать натяжение (поскольку пользователь поднялся на некоторую высоту), аппарат для облегчения лазания поворачивается под действием силы тяжести и снова опирается на первую опору 18. При этом срабатывание первого микровыключателя 24 снова инициирует сматывание веревки. Таким образом, качание аппарата вокруг оси 14 по мере натягивания и провисания веревки 9 в результате действий пользователя используется для управления функционированием барабана 6, чтобы поддерживать нужное натяжение веревки 9 в процессе лазания.
В режимах облегченного и необлегченного подъема в случае падения пользователя веревка 9 натягивается полным весом пользователя. Поэтому аппарат 1 повернется вокруг оси 14 до упора во вторую опору 19, активировав второй микровыключатель 28, так что двигатель 2 будет остановлен (не запитан). Датчик 200 нагрузки определит, что к веревке 9 приложен полный вес пользователя, путем сравнения воспринимаемой нагрузки с нагрузкой, детектированной при калибровке. Передаточное отношение зубчатой передачи 8 подобрано таким, чтобы удерживать пользователя в том же положении, пока он висит на веревке. Натяжение веревки 9 под действием веса пользователя сжимает пружину, приводя к срабатыванию третьего микровыключателя в составе механизма 30 преодоления установленных параметров. Активация данного механизма делает возможным спуск. Если сорвавшийся пользователь хочет спуститься, он может включить свой пульт беспроводного дистанционного управления (не изображен), чтобы передать электронной системе 22 управления/диагностики команду инициировать разматывание веревки 9 барабаном 6.
Если калибровка не проводилась, режим падения или спуска запускается приложением к веревке 9 любого веса.
Аналогично, если пользователь, завершивший подъем, хочет спуститься, он просто прекращает свой контакт с рабочей поверхностью, чтобы натянуть веревку 9 своим весом. Это приведет к срабатыванию механизма 30 преодоления установленных параметров, после чего можно будет использовать пульт дистанционного управления, чтобы инициировать разматывание веревки.
На фиг.2а иллюстрируется применение системы и аппарата 1 для облегчения лазания по фиг.1 при лазании (скалолазании) с верхней страховкой. Аппарат 1 для облегчения лазания расположен над поверхностью (стеной) 32, на которую производится подъем. Пользователь 34 поднимается по стене, будучи присоединен (пристегнут) к веревке 9, связанной с аппаратом 1 для облегчения лазания. Веревка 9 поддерживается натянутой посредством ее управляемого сматывания аппаратом 1, как это было описано со ссылкой на фиг.1. У пользователя 34 имеется пульт 38 беспроводного дистанционного управления, служащий для активирования аппарата 1 для облегчения лазания при начале подъема и для инициирования спуска (разматывания веревки), когда веревка натягивается весом пользователя и срабатывает механизм преодоления установленных параметров.
На фиг.2b показана альтернативная схема лазания с верхней страховкой, в которой аппарат 1 для облегчения лазания расположен у основания поверхности (стены) 32 для лазания. Веревка 9 проходит вверх и вокруг шкива 40, установленного над поверхностью 32, а от него идет вниз к пользователю 34.
На фиг.3а, 3b представлен другой вариант аппарата для облегчения лазания, в котором, вместо качающегося барабана, зубчатой передачи и двигателя, для управления работой барабана используются движения рычага. Барабан 6 установлен на несущем каркасе 10 в подшипниках 44, расположенных на концах его приводного вала 4. Для наглядности двигатель и зубчатая передача, приводящие вал 4 барабана во вращение, не изображены. Веревка 9 показана только на виде сбоку (фиг.3а), на котором барабан не изображен. У обоих концов барабана в шарнирах 48 установлено по одному угловому (Г-образному) рычагу 46, так что они могут поворачиваться вокруг общей оси, параллельной валу 4 барабана, из первого положения (показанного на фиг.3а сплошными линиями) во второе положение (показанное на фиг.3а штриховыми линиями).
У каждого рычага 46 имеется, по существу, вертикальное плечо 50 и, по существу, горизонтальное плечо 52, определяющие его Г-образный профиль. Рычаги 46 связаны друг с другом горизонтальным роликом 54, прикрепленным своими концами к верхним концам вертикальных плеч 50 Г-образных рычагов 46 с образованием управляющего рычажного узла 56. Вертикальные плечи имеют длину, достаточную для того, чтобы исключить контакт ролика 54 с расположенным под ним барабаном, так что рабочая веревка 9 будет огибать его, даже будучи полностью смотанной.
Горизонтальные плечи 52 Г-образных рычагов 46 служат грузами, которые стремятся повернуть управляющий рычажный узел 56 в шарнирах 48 в первое положение, в котором одно из вертикальных плеч 50 находится в контакте с первым микровыключателем 58 и активирует его.
Намотанная на барабан 6 рабочая веревка 9 отходит от него вверх, затем огибает ролик 54 управляющего рычажного узла и фиксированный ролик 60 и идет вверх к пользователю (на фиг.3а, 3b не изображен). Установленный на несущем каркасе 10 фиксированный ролик 60 может вращаться вокруг горизонтальной оси, параллельной оси ролика 54 управляющего рычажного узла 56 (но смещенной относительно нее в горизонтальной плоскости, когда этот узел находится в первом положении). Фиксированный ролик 60 смещен относительно ролика 54 в направлении, противоположном направлению, в котором управляющий рычажный узел 56 смещается под действием веса горизонтальных плеч Г-образных рычагов. При лазании с верхней страховкой в режиме облегченного подъема в моменты, когда веревка 9 не натянута, управляющий рычажный узел отводится в первое положение, и микровыключатель 58 срабатывает, выдавая электронной системе 22 управления/диагностики сигнал на активирование двигателя и зубчатой передачи, чтобы обеспечить сматывание веревки 9 на барабан 6 (выбор слабины). Когда веревка 9 натягивается, ее отрезок между фиксированным роликом 60 и барабаном оттягивает управляющий рычажный узел во второе положение, в котором, в результате контакта с вертикальным плечом 50 одного из Г-образных рычагов 46, срабатывает второй микровыключатель 62, так что электронная система 22 управления/диагностики останавливает двигатель и, соответственно, барабан 6.
Если (в ходе дальнейшего подъема пользователя) натяжение веревки 9 ослабнет, управляющий рычажный узел 56 возвращается, под действием веса горизонтальных плеч 52 Г-образных рычагов 46, в первое положение, т.е. перемещение управляющего рычажного узла 56 между первым и вторым положениями в зависимости от натягивания и провисания веревки 9 в результате действий пользователя используется для управления функционированием барабана 6 с целью поддерживания требуемого натяжения веревки 9 при лазании с верхней страховкой.
Для облегчения лазания производится калибровка системы, описанная применительно к предыдущим вариантам, после чего задатчик подъемного усилия задает размер подъемного усилия, прикладываемого к веревке 9 посредством барабана 6, когда активирован второй микровыключатель 62.
Имеется также механизм 64 преодоления установленных параметров, срабатывающий, когда натяжение веревки равно весу пользователя или превышает его. В данном варианте сигнал механизму 21 управления на переход в режим спуска выдается датчиком, измеряющим нагрузку на барабан. В этом режиме пользователь, который удерживается в постоянном положении (барабан остановлен), может, если он хочет спуститься, используя пульт дистанционного управления, передать механизму управления команду включить двигатель, чтобы начать разматывание веревки и спуск пользователя на землю.
Для осуществления лазания с нижней страховкой режим работы барабана 6 в зависимости от положения управляющего рычажного узла 56 меняется на обратный, т.е. электронная система 22 управления/диагностики запрограммирована на иную реакцию на сигналы микровыключателей. Барабан 6 выдает веревку, когда она натянута (рычажный узел во втором положении); при этом по мере подъема пользователя веревка сматывается. Барабан останавливается, когда веревка 9 не натянута (рычажный узел в первом положении).
В этом варианте при лазании с нижней страховкой механизм 64 преодоления установленных параметров останавливает барабан 6, когда натяжение равно весу пользователя или превышает его. Это позволяет пользователю продолжить подъем после падения без потери высоты вследствие разматывания веревки сразу же после падения.
На фиг.4 представлен вариант системы по изобретению для облегчения подъема к верхнему краю рабочей поверхности (стены) при лазании с верхней страховкой. В нормальном режиме двигатель 2 постоянно вращает вал 4, установленный в соответствующих подшипниках 66. На валу 4 установлены три барабана 6 с рабочими веревками 9, каждый из которых может индивидуально сочленяться с валом с помощью соответствующей электромагнитной муфты 68. При этом каждая муфта управляется индивидуально посредством управляющих рычажных узлов 56 (для наглядности показан лишь один из этих узлов), аналогичных использованным в варианте по фиг.3. Управляющие рычажные узлы 56 реагируют на натяжение соответствующих им веревок 9 путем передачи сигналов в электронную систему 22 управления/диагностики, которая приводит в действие электромагнитные муфты 68, чтобы соединить или рассоединить барабан 6 и приводной вал или (в режиме облегченного подъема) чтобы активировать барабан 6 для приложения требуемого подъемного усилия к веревке 9.
В процессе его использования каждый барабан 6 сочленяется через муфту 68 с валом 4, когда соответствующая ему веревка 9 не натянута, в результате чего она наматывается на барабан. Когда веревка натягивается, управляющий рычажный узел 56 перемещается и выдает соответствующий сигнал электронной системе 22 управления/диагностики, которая расцепляет муфту 68, прекращая сматывание. Если натяжение равно весу пользователя или превышает его, датчик, детектирующий нагрузку на барабан (механизм 64 преодоления установленных параметров), посылает в электронную систему 22 управления/диагностики сигнал на переход в режим опускания, в котором электромагнитная муфта 68 поочередно быстро соединяет и рассоединяет барабан 6 и приводной вал 4. Вес пользователя, приложенный к веревке 9, заставляет барабан 6 разматывать ее, но скорость опускания ограничивается безопасным уровнем за счет эффекта торможения в периоды, когда муфта 68 сочленяет барабан 6 с валом 4.
На фиг.5 представлен вариант системы по изобретению, схожий с представленным на фиг.3, но в котором управляющий рычажный узел 56 не снабжен грузами, служащими средством его отвода в первое положение, а для детектирования движения узла 56 применено другое средство. Более конкретно, средством, которое отжимает узел 56 в первое положение, является пружина 70, прикладывающая усилие через шкив 72. Это усилие регулируется посредством электрического исполнительного компонента 74, который управляется электронной системой 22 управления/ диагностики (не изображена, см. фиг.3b). В этом варианте, вместо микровыключателей, детектирование положения и перемещения узла 56 производится потенциометром 75, который установлен на подшипнике барабана 6 и сигналы от которого поступают в электронную систему 22 управления/диагностики (см. фиг.3b), чтобы управлять функционированием барабана и компонента 74. Потенциометр 75 может оказаться более чувствительным, чем схема с микровыключателями, что повысит чувствительность мониторинга рычажного узла.
На фиг.6 представлен вариант, также схожий с представленным на фиг.3. В нем использован прижимной ролик 76, перемещаемый посредством связанного с ним электрического исполнительного компонента, который способен перемещать прижимной ролик 76 по дуге, обозначенной стрелкой А. Когда аппарат 1 для облегчения лазания используется в нормальном режиме, во время подъема лазанием прижимной ролик 76 отведен от фиксированного ролика 60, чтобы не препятствовать функционированию управляющего рычажного узла 56. Если требуется смотать на барабан (на фиг.6 не изображен, см. фиг.3b) веревку 9, не находящуюся под натяжением (не прикрепленную к пользователю), аппарат 1 для облегчения лазания переводится (переключается) в режим сматывания, в котором соответствующий исполнительный компонент подводит прижимной ролик 76 вплотную к фиксированному ролику 60, чтобы создать давление на веревку в точке X. Это создает эффект натяжения веревки в процессе ее сматывания на барабан, гарантирующий, что веревка не образует на барабане никаких неплотных витков.
На фиг.7а показаны два аппарата 1, 1а по изобретению для облегчения лазания, расположенные у концов верхнего края стены 82 здания. Пользователь 34 связан посредством веревок 9, 9а с каждым из этих аппаратов. По команде с пульта дистанционного управления (не изображен) пользователь 34 может быть поднят посредством аппаратов 1, 1а для облегчения лазания. Задавая для каждой веревки 9, 9а различные длины, подлежащие намотке посредством аппаратов 1, 1а для облегчения лазания, пользователь может осуществлять траверс поверхности стены 82, а также подъем или спуск.
На фиг.7b аппарат 1 для облегчения лазания показан установленным на рельс 84, проложенный по верхнему краю стены 82 здания. Пользователь 34 связан с аппаратом 1 для облегчения лазания, который использует двухсекционный барабан, двумя веревками 9, 9а. Вторая веревка обеспечивает дополнительную безопасность. При этом пользователь, чтобы подняться или опуститься, может приводить в действие барабан аппарата 1 для облегчения лазания. Он может также приводить аппарат 1 в движение по рельсу 84 посредством электродвигателя. В результате пользователь 34 способен достичь любого участка стены 82 для выполнения работы по уходу за ней.
На фиг.8 представлена блок-схема, поясняющая различные режимы калибровочного устройства, аппарата для облегчения лазания и системы для облегчения лазания.
Блок 100 соответствует холостому режиму системы для облегчения лазания, когда она готова к запуску в первом режиме (режиме калибровки) или в третьем режиме (режиме необлегченного подъема).
Если пользователь (скалолаз) желает совершить необлегченный подъем, он переходит на шаг 110, на котором система для облегчения лазания функционирует именно в этом режиме. В этом случае работа барабана направлена на предотвращение слабины веревки между пользователем и барабаном. При этом используется средство детектирования нагрузки, служащее для обнаружения момента, в который к веревке прикладывается вес пользователя, и для переключения барабана в четвертый режим (режим падения или опускания). В этом режиме барабан остановлен, а пользователь зависает на веревке (оказывается "подвешенным" на ней).
Если пользователь решает активировать режим облегченного подъема, он переходит на шаг 120, на котором он прикладывает к веревке свой полный вес, чтобы инициировать режим калибровки, а средство детектирования нагрузки детектирует созданную нагрузку. Если пользователь приложит к веревке только часть своего веса, она будет прокалибрована для более низкого уровня нагрузки. По истечении заданного периода (3-5 с) пользователю выдается звуковой сигнал, сообщающий, что режим калибровки успешно завершен и требуемое подъемное усилие определено в процентах от нагрузки, приложенной к веревке пользователем. Если требуется подъемное усилие, равное 80% от нагрузки, приложенной к веревке, это значение (80%) программируется в системе для облегчения лазания до выполнения шага 120. Если режим калибровки успешно завершен, в режиме облегченного подъема, инициированном на шаге 130, подъемное усилие, обеспечиваемое средством приложения этого усилия, составит 80% нагрузки, детектированной средством детектирования нагрузки.
На шаге 140 пользователь поднимается в режиме облегченного подъема, в котором, чтобы сделать подъем более легким, к веревке через барабан прикладывается подъемное усилие.
На шаге 150 пользователь может завершить подъем в указанном режиме.
Альтернативно, если пользователь падает или останавливается более чем на 5 с, система для облегчения лазания на шаге 160 снимет подъемное усилие и инициирует, по выбору пользователя, режим падения/спуска или режим необлегченного подъема.
На шаге 170 пользователь может рекалибровать систему для облегчения лазания и продолжить лазание в режиме облегченного подъема. Альтернативно, на шаге 180 (который реально должен следовать за шагом 110) он может продолжить лазание в режиме необлегченного подъема или осуществить спуск без поддержки.
Аппарат и система для облегчения лазания обеспечивают в процессе подъема такой уровень поддержки пользователя (подъемного усилия), который всегда меньше, чем вес пользователя, если только не запущен режим принудительного подъема. Тем самым устраняется риск неправильной настройки системы пользователем и, следовательно, риск его подъема в опасное положение.
Далее, поскольку аппарат и система для облегчения лазания автоматически (с помощью средства детектирования нагрузки) детектируют изменение нагрузки на веревку, не требуется никакого ручного вмешательства при изменении нагрузки в случае смены пользователей или в случае оставления или приема снаряжения с соответствующим снижением или увеличением нагрузки, детектируемой указанным средством.
Поскольку аппарат и система для облегчения лазания автоматически (с помощью средства детектирования нагрузки) детектируют изменение нагрузки на веревку, отсутствует какой-либо риск сохранения настроек для предыдущего пользователя при появлении следующего пользователя.
Благодаря эффективному способу определения допустимого подъемного усилия, прикладываемого к веревке, это усилие может быть сделано большим, чем это возможно в известных системах, в связи с отсутствием риска сделать это усилие превышающим нагрузку, прикладываемую к веревке.
В описанные варианты можно внести, без выхода за пределы изобретения, различные модификации.
Например, хотя описанные (со ссылками на чертежи) варианты относятся преимущественно к лазанию и облегчению лазания, должно быть понятно, что изобретение применимо к любым видам подъема и/или спуска.
Так, изобретение может найти применение во многих областях, например в промышленном альпинизме, эвакуации, спасательных работах, поддержке скалолазания, предотвращении падения и страховке при выполнении высотных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРАХОВОЧНОЕ УСТРОЙСТВО | 2006 |
|
RU2396998C2 |
| СТРАХОВОЧНОЕ УСТРОЙСТВО (варианты) | 2021 |
|
RU2758428C1 |
| СВЕТОДИОДНЫЙ СВЕТИЛЬНИК, СОДЕРЖАЩИЙ УСТРОЙСТВО РЕГУЛИРОВАНИЯ МОЩНОСТИ | 2012 |
|
RU2614143C2 |
| СТАЦИОНАРНОЕ СТРАХОВОЧНОЕ УСТРОЙСТВО | 2012 |
|
RU2519934C1 |
| СВЕТОДИОДНЫЙ СВЕТИЛЬНИК, СОДЕРЖАЩИЙ УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГЕОМЕТРИЕЙ СВЕТОВОГО ПУЧКА | 2012 |
|
RU2614044C2 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| ИЗМЕРИТЕЛЬ УГЛА НАКЛОНА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ПРОМЫШЛЕННОЙ МАШИНЫ | 2012 |
|
RU2623679C2 |
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ СТРАХОВКИ АЛЬПИНИСТОВ | 2000 |
|
RU2193431C2 |
| Устройство для тренировки альпинистов приемам страховки | 1985 |
|
SU1319877A1 |
| ОКОННОЕ ЗАКРЫВАЮЩЕЕ СРЕДСТВО И РЕГУЛИРУЮЩИЙ МЕХАНИЗМ | 2011 |
|
RU2479704C2 |
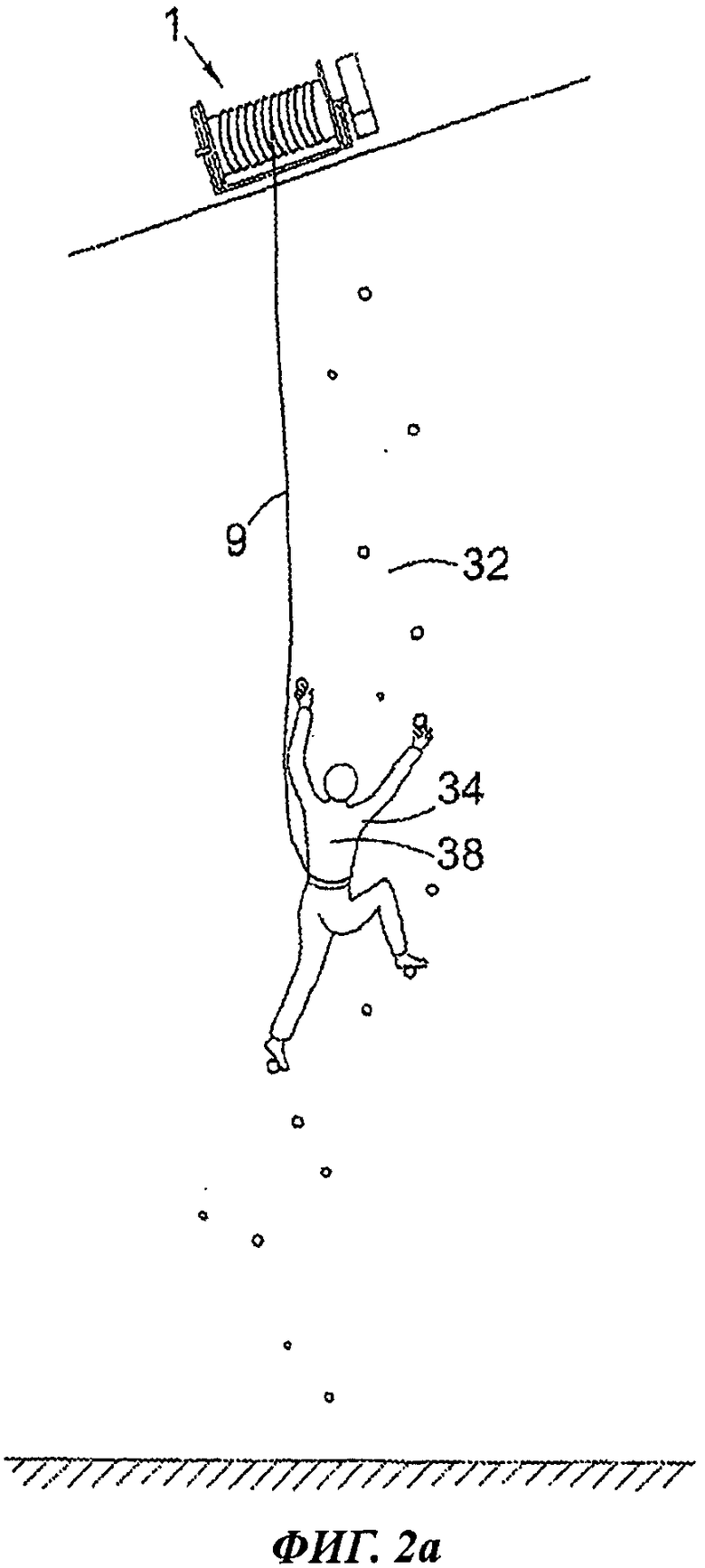
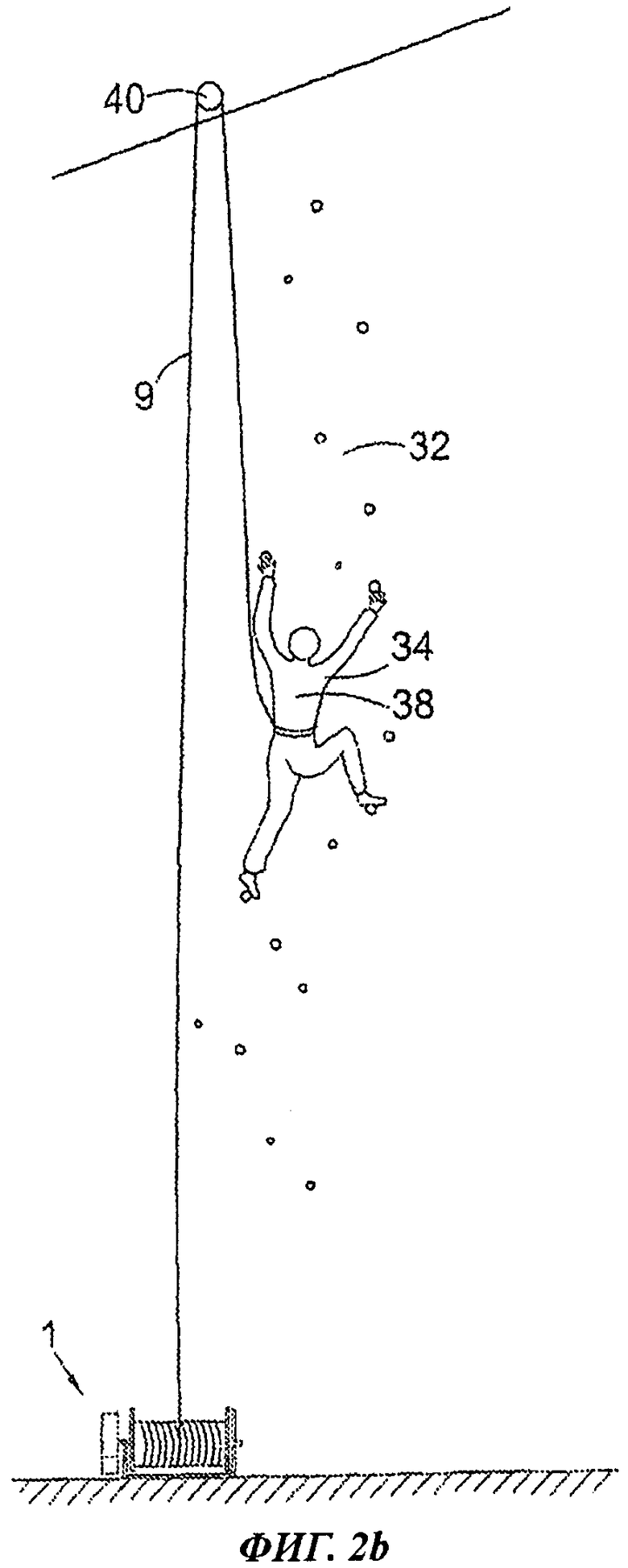
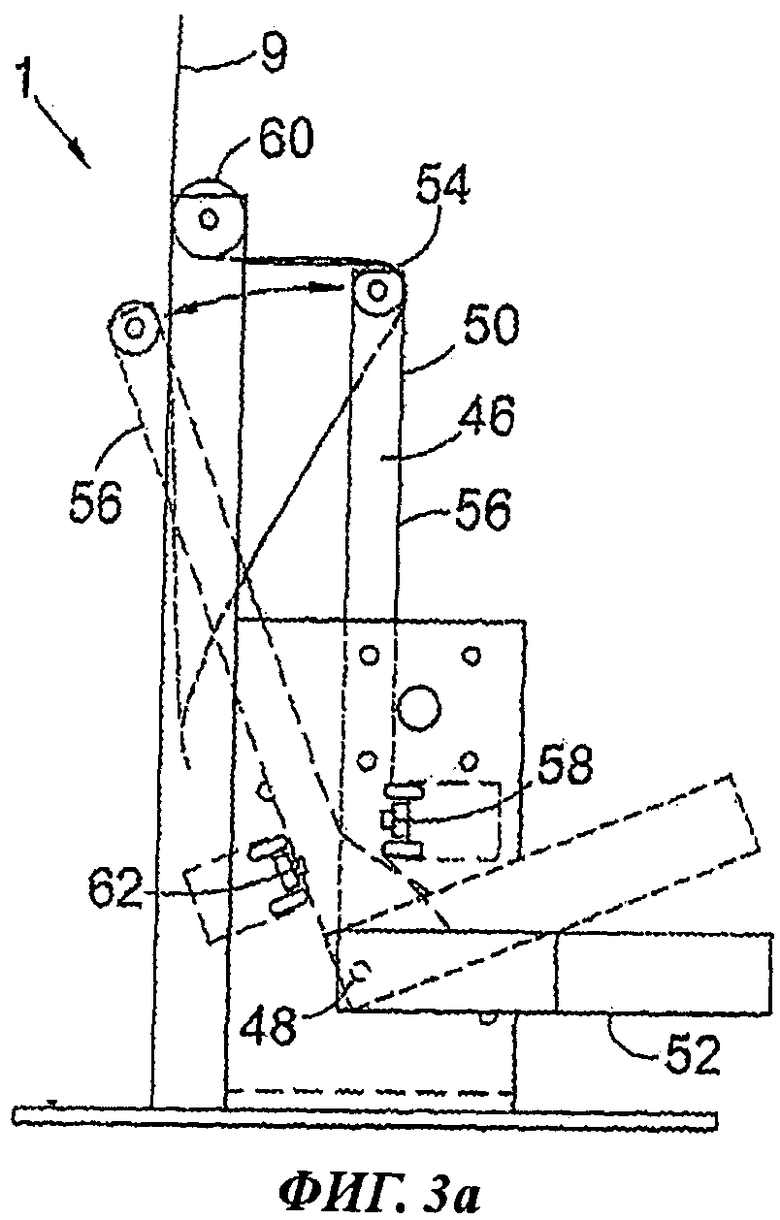
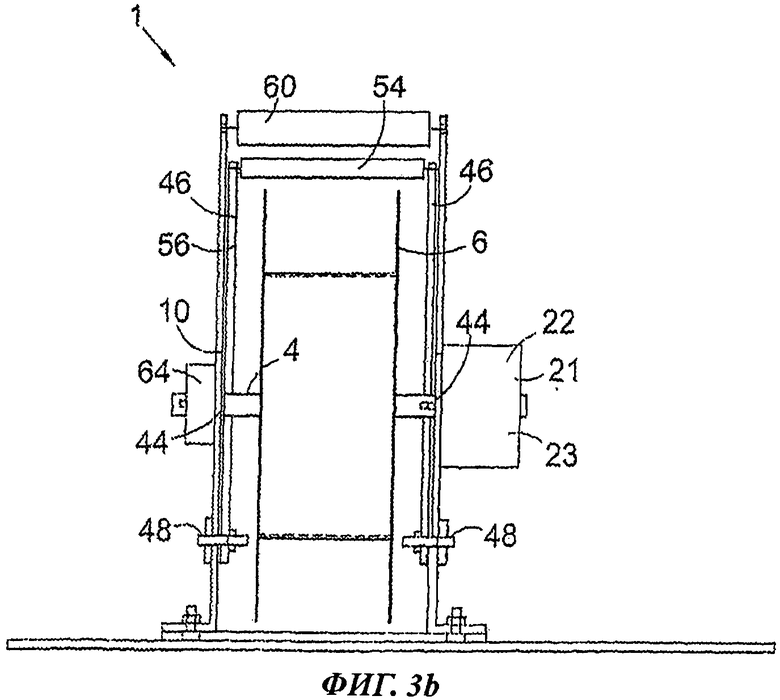
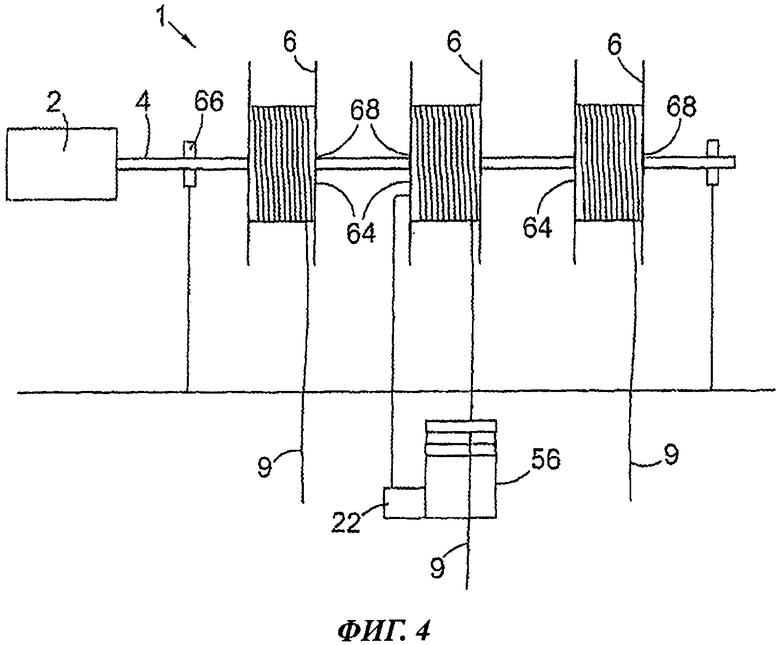
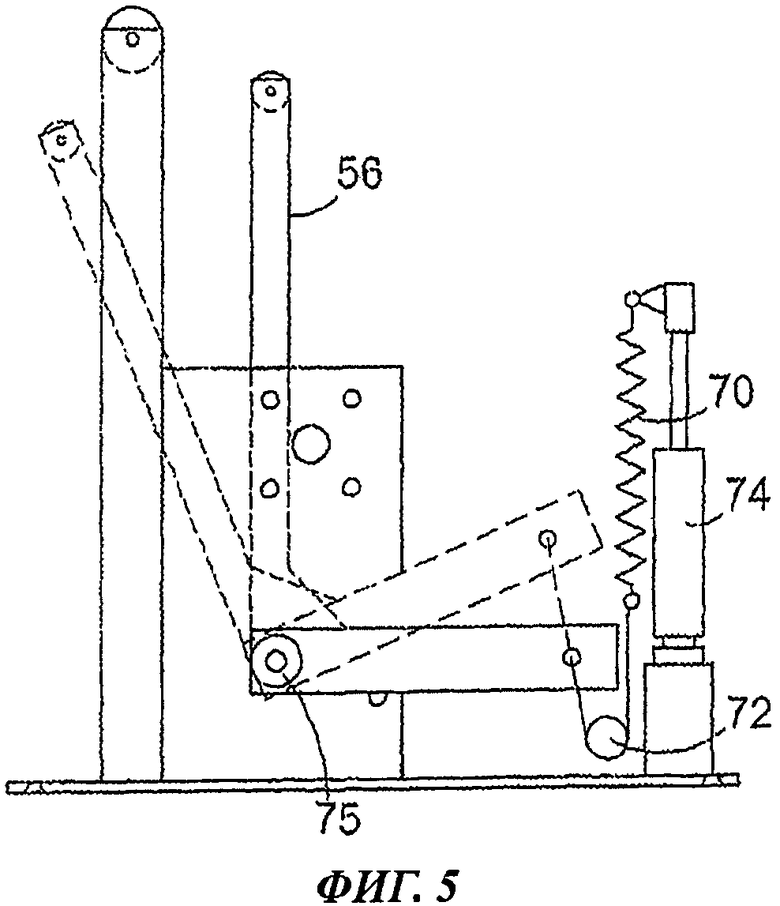
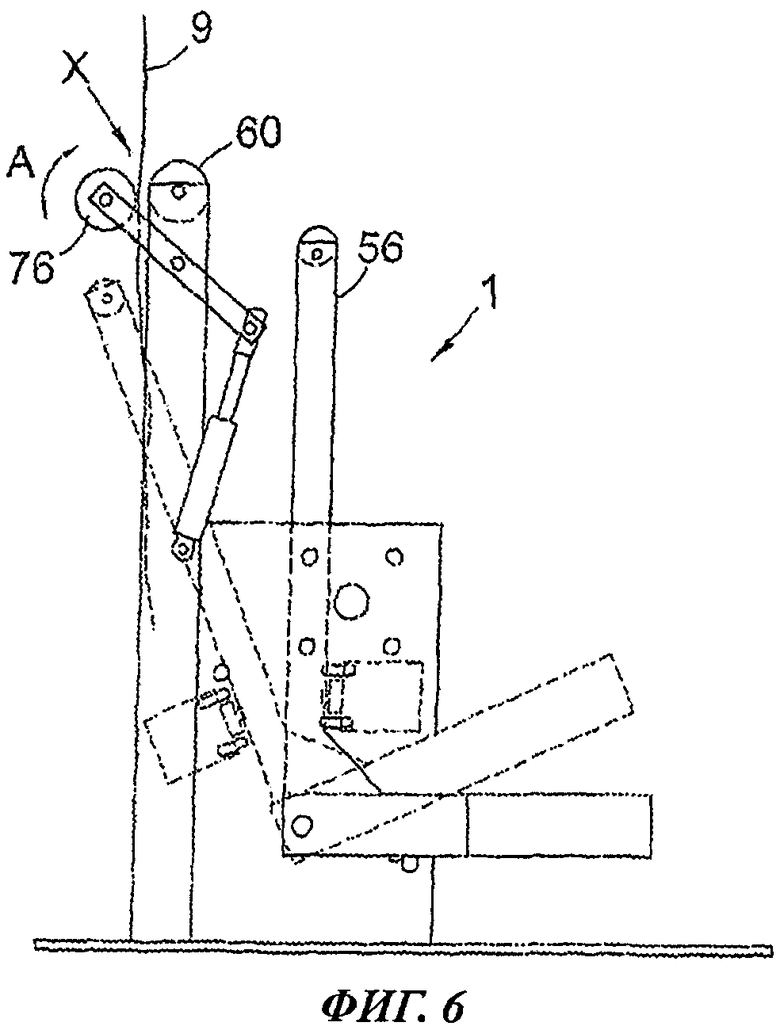
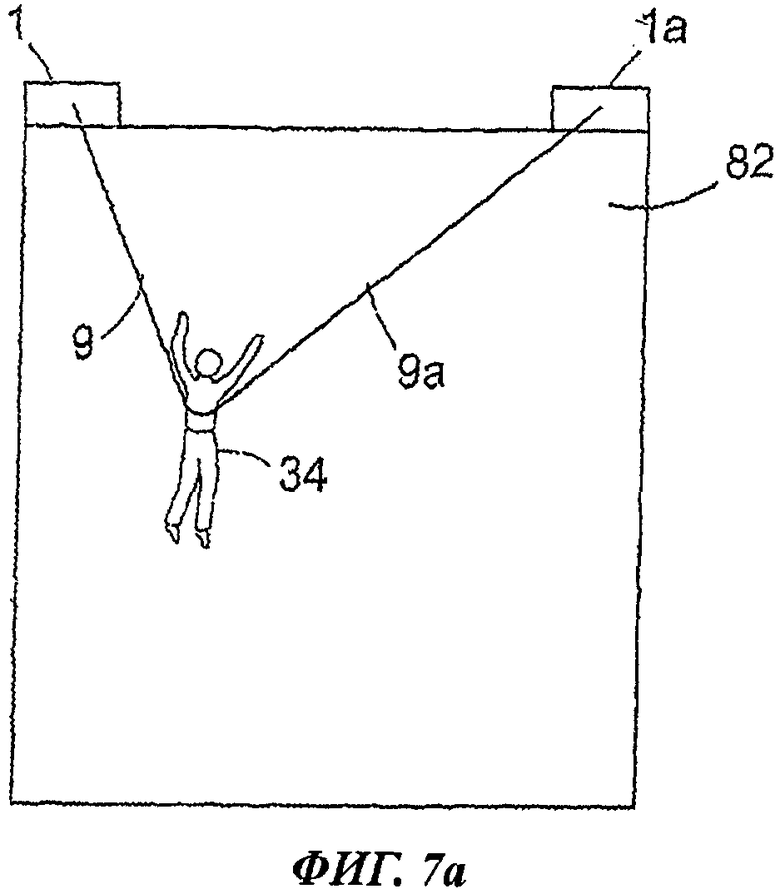
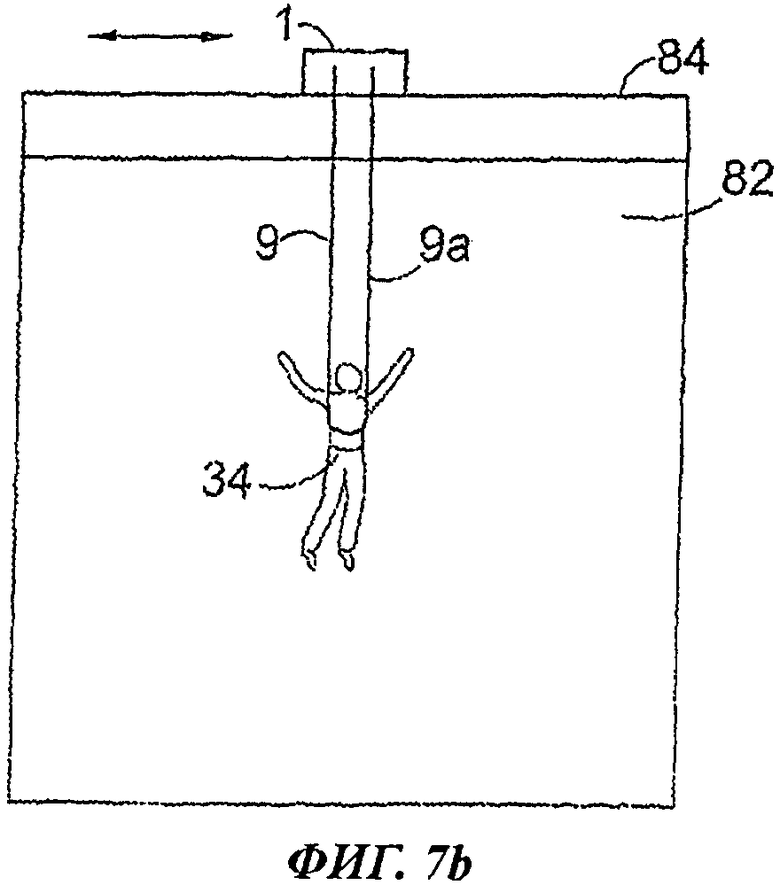

Изобретение относится к аппарату и системе для облегчения подъема, а также к способу, облегчающему пользователю процесс подъема. Устройство для калибровки нагрузки, аппарат для облегчения подъема и лазания и система для облегчения подъема и лазания содержат генераторы тяговых усилий; компоненты для приложения тяговых усилий, функционально связанные с генераторами тяговых усилий и выполнены с возможностью приложений, при использовании устройства, аппарата и системы, тягового усилия к объекту, механизмы управления, которые содержат средства детектирования нагрузки и средства приложения подъемного усилия, механизированные барабаны и веревку, которая прикреплена к барабану и объекту при использовании устройства. Для облегчения пользователю подъема в условиях работы на высоте обеспечивают наличие веревки, детектирование, средством детектирования нагрузки, нагрузки, которая приложена к веревке в первом направлении, выбор уровня, обеспечиваемого пользователю облегчение подъема, определение подъемного усилия, приложение подъемного усилия во втором направлении, чтобы уравновесить нагрузку, которая приложена к веревке в первом направлении, и выдачу пользователю, который пристегнут к веревке, сигнал о завершении определения подъемного усилия. Достигается создание устройства для калибровки нагрузки. 7 н. и 58 з.п. ф-лы, 11 ил.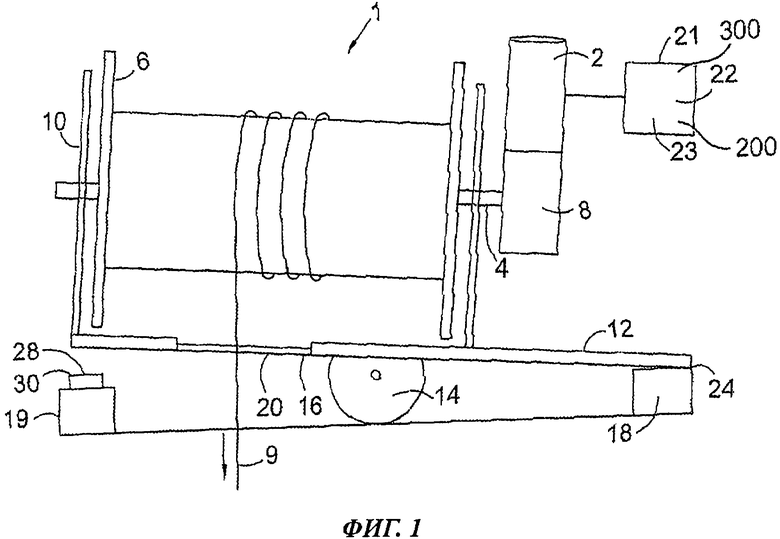
1. Устройство для калибровки нагрузки, содержащее:
генератор тягового усилия;
компонент для приложения тягового усилия, функционально связанный с генератором тягового усилия и выполненный с возможностью приложения, при использовании устройства, тягового усилия к объекту,
и механизм управления, содержащий средство детектирования нагрузки и средство приложения подъемного усилия и выполненный с возможностью управления генератором тягового усилия в первом, калибровочном режиме, в котором генератор тягового усилия остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной объектом к компоненту для приложения тягового усилия, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах, а устройство выполнено с возможностью подачи пользователю сигнала, указывающего на успешное завершение калибровки устройства.
2. Устройство по п.1, отличающееся тем, что объект содержит пользователя.
3. Устройство по п.1, отличающееся тем, что объект содержит снаряжение, инструменты или другой неодушевленный предмет.
4. Устройство по п.1, отличающееся тем, что генератор тягового усилия содержит один или более из следующих компонентов: механизированный барабан, таль, монтажная лебедка, кабестан, шкив, противовес и/или механизированный подъемник.
5. Устройство по п.1, отличающееся тем, что средство приложения подъемного усилия содержит веревку.
6. Устройство по п.1, отличающееся тем, что генератор тягового усилия представляет собой механизированный барабан, а средство приложения подъемного усилия представляет собой веревку, прикрепленную к барабану и, при использовании устройства, прикрепляемую к объекту.
7. Устройство по п.5, отличающееся тем, что веревка образует непрерывную петлю.
8. Устройство по п.5, отличающееся тем, что веревка прикреплена одним концом к генератору тягового усилия и, при использовании устройства, своей дистальной частью к объекту.
9. Устройство по п.1, отличающееся тем, что компонент для приложения тягового усилия представляет собой платформу.
10. Устройство по п.1, отличающееся тем, что коэффициент a облегчения нагрузки выбран в интервале 0-99%.
11. Устройство по п.10, отличающееся тем, что коэффициент а облегчения нагрузки выбран в интервале 10-70%.
12. Устройство по п.1, отличающееся тем, что подъемное усилие выбрано не превышающим 140 кгс.
13. Устройство по любому из пп.1-12, отличающееся тем, что средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, после того как возможность детектирования нагрузки средством детектирования нагрузки обеспечивалась в течение заданного периода.
14. Устройство по п.13, отличающееся тем, что заданный период выбирается в интервале 0-10 с.
15. Устройство для калибровки нагрузки, содержащее:
механизированный барабан;
веревку, прикрепленную к барабану и, при использовании устройства, прикрепляемую к объекту,
и механизм управления, содержащий средство детектирования нагрузки и средство приложения подъемного усилия и выполненный с возможностью управления механизированным барабаном в первом, калибровочном режиме, в котором барабан остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной к веревке, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к веревке барабаном, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах, а устройство выполнено с возможностью подачи пользователю сигнала, указывающего на успешное завершение калибровки устройства.
16. Устройство по п.15, отличающееся тем, что веревка образует непрерывную петлю.
17. Устройство по п.15, отличающееся тем, что веревка прикреплена одним концом к генератору тягового усилия и, при использовании устройства, своей дистальной частью к пользователю.
18. Устройство по п.15, отличающееся тем, что коэффициент а облегчения нагрузки выбран в интервале 0-99%.
19. Устройство по п.18, отличающееся тем, что коэффициент а облегчения нагрузки выбран в интервале 10-70%.
20. Устройство по п.15, отличающееся тем, что подъемное усилие выбрано не превышающим 140 кгс.
21. Устройство по любому из пп.15-20, отличающееся тем, что средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к веревке барабаном после того, как возможность детектирования нагрузки средством детектирования нагрузки обеспечивалась в течение заданного периода.
22. Устройство по п.21, отличающееся тем, что заданный период выбирается в интервале 0-10 с.
23. Аппарат для облегчения подъема, содержащий:
генератор тягового усилия;
компонент для приложения тягового усилия, функционально связанный с генератором тягового усилия и выполненный с возможностью приложения, при использовании аппарата, тягового усилия к объекту,
и механизм управления, содержащий средство детектирования нагрузки и средство приложения подъемного усилия и выполненный с возможностью управления генератором тягового усилия в первом, калибровочном режиме, в котором генератор тягового усилия остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной объектом к компоненту для приложения тягового усилия, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах;
при этом механизм управления выполнен с возможностью переключения генератора тягового усилия во второй режим, режим облегченного подъема, в котором генератор тягового усилия воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия, а средство приложения подъемного усилия выполнено с возможностью приложения указанного определенного подъемного усилия к компоненту для приложения тягового усилия посредством генератора тягового усилия, причем подъемное усилие воздействует на компонент для приложения тягового усилия в направлении, противоположном направлению действия нагрузки.
24. Аппарат по п.23, отличающийся тем, что объект содержит пользователя.
25. Аппарат по п.23, отличающийся тем, что объект содержит снаряжение, инструменты или другой неодушевленный предмет.
26. Аппарат по п.23, отличающийся тем, что генератор тягового усилия содержит один или более из следующих компонентов: механизированный барабан, таль, монтажная лебедка, кабестан, шкив, противовес и/или механизированный подъемник.
27. Аппарат по п.23, отличающийся тем, что средство приложения подъемного усилия содержит веревку.
28. Аппарат по п.23, отличающийся тем, что генератор тягового усилия представляет собой механизированный барабан, а средство приложения подъемного усилия представляет собой веревку, прикрепленную к барабану и, при использовании аппарата, прикрепляемую к объекту.
29. Аппарат по п.27, отличающийся тем, что веревка образует непрерывную петлю.
30. Аппарат по п.27, отличающийся тем, что веревка прикреплена одним концом к генератору тягового усилия и, при использовании устройства, своей дистальной частью к объекту.
31. Аппарат по п.23, отличающийся тем, что компонент для приложения тягового усилия представляет собой платформу.
32. Аппарат по п.23, отличающийся тем, что коэффициент а облегчения нагрузки выбран в интервале 0-99%.
33. Аппарат по п.23, отличающийся тем, что коэффициент а облегчения нагрузки выбран в интервале 10-70%.
34. Аппарат по п.23, отличающийся тем, что объект представляет собой человека/пользователя, а подъемное усилие выбрано не превышающим 140 кгс.
35. Аппарат по п.23, отличающийся тем, что средство приложения подъемного усилия выполнено с возможностью определять уровень подъемного усилия, которое может быть приложено к нагрузке в качестве реакции на детектирование указанной нагрузки средством детектирования нагрузки.
36. Аппарат по п.23, отличающийся тем, что выполнен с возможностью осуществления, перед осуществлением первого калибровочного режима, предкалибровочного режима, в котором механизм управления обеспечивает управление генератором тягового усилия, направленное на выравнивание усилий, связанных с объектом, до тех пор, пока средство детектирования нагрузки не будет детектировать постоянную нагрузку в течение заданного периода.
37. Аппарат по п.23, отличающийся тем, что средство приложения подъемного усилия обеспечивает возможность определять, в первом, калибровочном режиме, значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, после того как возможность детектирования нагрузки средством детектирования нагрузки обеспечивалась в течение заданного периода.
38. Аппарат по п.37, отличающийся тем, что заданный период выбирается в интервале 0-10 с.
39. Аппарат по п.23, отличающийся тем, что выполнен с возможностью подачи пользователю сигнала, указывающего на успешное завершение калибровки аппарата.
40. Аппарат по любому из пп.23-39, отличающийся тем, что средство детектирования нагрузки выполнено с возможностью детектировать, при осуществлении указанного режима облегченного подъема, изменение нагрузки, действующей на компонент для приложения тягового усилия.
41. Аппарат по п.40, отличающийся тем, что в случае детектирования, при осуществлении указанного режима облегченного подъема, средством детектирования нагрузки изменения нагрузки, действующей на компонент для приложения тягового усилия, механизм управления способен переключить генератор тягового усилия в третий режим, режим необлегченного подъема, в котором генератор тягового усилия сначала воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия, а средство приложения подъемного усилия не прилагает, посредством генератора тягового усилия, никакого подъемного усилия к компоненту для приложения тягового усилия.
42. Аппарат по п.40, отличающийся тем, что в случае детектирования средством детектирования нагрузки, при осуществлении указанного режима облегченного подъема, нагрузки, по существу, равной нагрузке, детектированной указанным средством детектирования нагрузки в первом, калибровочном режиме как приложенной к компоненту приложения тягового усилия, механизм управления способен перевести генератор тягового усилия в четвертый режим, режим падения или спуска, в котором генератор тягового усилия остановлен, средство приложения подъемного усилия не прилагает, посредством генератора тягового усилия, никакого подъемного усилия к компоненту для приложения тягового усилия, а пользователь удерживается компонентом для приложения тягового усилия в постоянном положении.
43. Аппарат для облегчения лазания, содержащий:
механизированный барабан;
веревку, прикрепленную к барабану и, при использовании устройства, прикрепляемую к объекту,
и механизм управления, содержащий средство детектирования нагрузки и средство приложения подъемного усилия и выполненный с возможностью управления механизированным барабаном в первом, калибровочном режиме, в котором барабан остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной к веревке, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к веревке барабаном, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах,
при этом механизм управления выполнен с возможностью переключать указанный барабан во второй режим, режим облегченного подъема, в котором указанный барабан обеспечивает предотвращение слабины веревки между пользователем аппаратом и барабаном, а средство приложения подъемного усилия выполнено с возможностью приложения к веревке, посредством барабана, подъемного усилия, обеспечивающего, в заданной степени, облегчение подъема для пользователя.
44. Аппарат по п.43, отличающийся тем, что коэффициент а облегчения нагрузки выбран в интервале 0-99%.
45. Аппарат по п.43, отличающийся тем, что коэффициент а облегчения нагрузки выбран в интервале 10-70%.
46. Аппарат по п.43, отличающийся тем, что средство приложения подъемного усилия обеспечивает возможность определять, в первом, калибровочном режиме, значение подъемного усилия, которое должно быть приложено к веревке барабаном после того, как возможность детектирования нагрузки средством детектирования нагрузки обеспечивалась в течение заданного периода.
47. Аппарат по п.46, отличающийся тем, что заданный период выбирается в интервале 0-10 с.
48. Аппарат по п.43, отличающийся тем, что выполнен с возможностью подачи пользователю сигнала, указывающего на успешное завершение калибровки аппарата.
49. Аппарат по п.43, отличающийся тем, что средство детектирования нагрузки выполнено с возможностью детектировать, при осуществлении указанного режима облегченного подъема, изменение нагрузки на веревку.
50. Аппарат по п.49, отличающийся тем, что в случае детектирования, при осуществлении указанного режима облегченного подъема, средством детектирования нагрузки изменения нагрузки на веревку, механизм управления способен обеспечить перевод барабана в третий режим, режим необлегченного подъема, в котором барабан обеспечивает предотвращение слабины веревки между пользователем аппаратом и барабаном, а средство приложения подъемного усилия прекращает прикладывать, посредством барабана, подъемное усилие к веревке.
51. Аппарат по п.49, отличающийся тем, что в случае детектирования средством детектирования нагрузки, при осуществлении указанного режима облегченного подъема, нагрузки, по существу, равной нагрузке, детектированной указанным средством детектирования нагрузки в первом, калибровочном режиме как приложенной к веревке, механизм управления способен перевести барабан в четвертый режим, режим падения или спуска, в котором барабан остановлен, средство приложения подъемного усилия не прилагает никакого подъемного усилия к веревке посредством барабана, а пользователь удерживается веревкой в постоянном положении.
52. Аппарат по п.43, отличающийся тем, что механизм управления способен обеспечить перевод барабана в третий режим, режим необлегченного подъема, в котором барабан обеспечивает предотвращение слабины веревки между пользователем аппаратом и барабаном, а средство приложения подъемного усилия не обеспечивает приложения подъемного усилия к веревке посредством барабана.
53. Аппарат по п.52, отличающийся тем, что средство детектирования нагрузки выполнено с возможностью детектировать, при осуществлении указанного режима необлегченного подъема, вес пользователя, приложенный к веревке, и переводить барабан в указанный режим падения или спуска, в котором барабан остановлен, средство приложения подъемного усилия прекращает прилагать, посредством барабана, подъемное усилие к веревке, а пользователь зависает на веревке.
54. Аппарат по любому из пп.43-53, отличающийся тем, что сконфигурирован с возможностью детектировать, в процессе его использования, остановку или паузу в движении пользователя.
55. Аппарат по п.54, отличающийся тем, что механизм управления выполнен с возможностью, в случае детектирования паузы или остановки в движении пользователя, переводить барабан в указанный режим необлегченного подъема, в котором барабан способен предотвращать слабину веревки между пользователем, аппаратом и барабаном, а средство приложения подъемного усилия прекращает прилагать, посредством барабана, подъемное усилие к веревке.
56. Система для облегчения подъема, содержащая:
генератор тягового усилия;
компонент для приложения тягового усилия, функционально связанный с генератором тягового усилия и выполненный с возможностью приложения, при использовании системы, тягового усилия к объекту,
и механизм управления, содержащий средство детектирования нагрузки, электронную систему управления/диагностики и средство приложения подъемного усилия и выполненный с возможностью управления генератором тягового усилия в первом, калибровочном режиме, в котором генератор тягового усилия остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной объектом к компоненту для приложения тягового усилия, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к компоненту для приложения тягового усилия генератором тягового усилия, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах, при этом:
механизм управления выполнен с возможностью переключения генератора тягового усилия во второй режим, режим облегченного подъема, в котором генератор тягового усилия воздействует на компонент для приложения тягового усилия до тех пор, пока нагрузка, детектированная средством детектирования нагрузки, не станет равной весу компонента для приложения тягового усилия, а средство приложения подъемного усилия выполнено с возможностью приложения указанного определенного подъемного усилия к компоненту для приложения тягового усилия, посредством генератора тягового усилия, тягового усилия, которое облегчает объекту подъем;
средство детектирования нагрузки выполнено с возможностью детектировать, при осуществлении указанного режима облегченного подъема, вес объекта, приложенный к компоненту для приложения тягового усилия, и переключать генератор тягового усилия в четвертый режим, режим падения или спуска, в котором генератор тягового усилия остановлен, объект удерживается средством приложения тягового усилия, а электронная система управления/диагностики обеспечивает мониторинг функционирования генератора тягового усилия и механизма управления и, при обнаружении неисправности, переключение генератора тягового усилия в пятый, аварийный режим.
57. Система по п.56, отличающаяся тем, что объект содержит пользователя.
58. Система по п.56, отличающаяся тем, что объект содержит снаряжение, инструменты или другой неодушевленный предмет.
59. Система по п.56, отличающаяся тем, что генератор тягового усилия содержит один или более механизированных барабанов, талей, монтажных лебедок, кабестанов, шкивов, противовесов и/или механизированных подъемников.
60. Система по любому из пп.56-59, отличающаяся тем, что средство приложения подъемного усилия содержит веревку.
61. Система для облегчения лазания, содержащая:
механизированный барабан;
веревку, прикрепленную к барабану и, при использовании устройства, прикрепляемую к объекту,
и механизм управления, содержащий средство детектирования нагрузки, электронную систему управления/диагностики и средство приложения подъемного усилия и выполненный с возможностью управления механизированным барабаном в первом, калибровочном режиме, в котором барабан остановлен, а средство детектирования нагрузки обеспечивает детектирование нагрузки, приложенной к веревке, причем средство приложения подъемного усилия выполнено с возможностью определять значение подъемного усилия, которое должно быть приложено к веревке барабаном, в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах; при этом:
механизм управления выполнен с возможностью переключения барабана во второй режим, режим облегченного подъема, в котором барабан обеспечивает предотвращение слабины веревки между пользователем системой и барабаном, а средство приложения подъемного усилия выполнено с возможностью приложения к веревке, посредством барабана, подъемного усилия, обеспечивающего, в заданной степени, облегчение подъема для пользователя;
средство детектирования нагрузки выполнено с возможностью детектировать вес пользователя, приложенный к веревке, и переводить барабан в четвертый режим, режим падения или спуска, в котором барабан остановлен, пользователь зависает на веревке, а электронная система управления/диагностики обеспечивает мониторинг функционирования механизированного барабана и механизма управления и, при обнаружении неисправности, переключение барабана в пятый, аварийный режим.
62. Система по п.61, отличающаяся тем, что в случае обнаружения, при осуществлении указанного аварийного режима, некатастрофической неисправности способна переключиться в шестой режим, режим вынужденного возврата, в котором отключены все сложные функции системы и включены все звуковые источники тревожной сигнализации для информирования пользователя о необходимости вернуться на безопасный уровень и произвести проверку системы.
63. Система по п.61 или 62, отличающаяся тем, что выполнена с возможностью осуществления седьмого режима, режима дискретного подъема пользователя.
64. Способ облегчения пользователю подъема в условиях работы на высоте, включающий следующие операции:
обеспечение наличия веревки;
детектирование, средством детектирования нагрузки, нагрузки, приложенной к веревке в первом направлении;
выбор уровня, обеспечиваемого пользователю облегчение подъема;
определение подъемного усилия в соответствии с уравнением hf=dl×a, где: hf - подъемное усилие; dl - детектированная нагрузка (нагрузка, детектированная средством детектирования нагрузки), а - коэффициент облегчения нагрузки, выраженный в процентах,
приложение подъемного усилия во втором направлении, чтобы уравновесить нагрузку, приложенную к веревке в первом направлении, и
выдачу пользователю, пристегнутому к веревке, сигнала о завершении определения подъемного усилия.
65. Способ по п.64, отличающийся тем, что дополнительно включает одну или более из следующих операций: обеспечение заданной временной задержки между операциями определения подъемного усилия, как доли детектированной нагрузки, приложенной к веревке; приложение подъемного усилия для уравновешивания нагрузки, приложенной к веревке, и снятие подъемного усилия в качестве реакции на изменение детектированной нагрузки, приложенной к веревке.
| WO 03035184 A1, 16.11.2005 | |||
| Лосьон для нормальной и сухой кожи лица | 1987 |
|
SU1595522A1 |
| WO 2009126541 A1, 15.10.2009 | |||
| DE 102005044922 A1, 05.04.2007 | |||
| УСТРОЙСТВО ДЛЯ ИМИТАЦИИ СТРАХОВКИ АЛЬПИНИСТОВ | 2000 |
|
RU2193431C2 |
| Пишущий телеграфный аппарат | 1926 |
|
SU10701A1 |

