Область техники, к которой относится изобретение
Настоящее изобретение относится к исполнительному механизму подъемного устройства, более точно к электрическому исполнительному механизму подъемного устройства для применения в разнообразных подъемных системах, включающему различные усовершенствования, которые снижают стоимость и улучшают характеристики (например, увеличивают общую предельную грузоподъемность) и надежность исполнительного механизма, а кроме того, обеспечивают выполнение исполнительного механизма, рабочего органа и компонентов согласно единому замыслу для различных применений и/или диапазонов нагрузок.
Уровень техники
Из области погрузочно-разгрузочных работ хорошо известно применение электрических исполнительных механизмов подъемных устройств.
Электрические подъемные устройства особо эффективны и применяются в различных областях, обеспечивая варьируемую грузоподъемность отдельных подъемных устройств для подъема и транспортировки грузов. Примеры таких устройств включают системы Gorbel G-Force(™) и Easy Arm(™).
Более точно, настоящее изобретение относится к классу погрузочно-разгрузочных устройств, называемых разгрузчиками или подъемниками, которые включают подъемный шкив с электроприводом, имеющий кабель или трос, один конец которого закреплен на шкиве и наматывается на шкив при его вращении, и рабочий орган или орган управления на пульте оператора в виде подвесного или подобного электромеханического устройства, которое может быть прикреплено к другому (свободному или незакрепленному) концу кабеля. Рабочий орган имеет компоненты, соединенные с поднимаемым грузом, а при вращении шкива трос наматывается или разматывается, и рабочий орган поднимает или опускает соединенный с ним груз. В одном из режимов работы исполнительный механизм прикладывает крутящий момент к шкиву и генерирует направленное вверх усилие троса, в точности равное силе тяжести поднимаемого объекта, в результате чего напряжение троса преимущественно уравновешивает вес объекта. За счет этого единственным усилием, которое должен прикладывать оператор для перемещения объекта, является сила ускорения объекта.
В системах одного из классов эти устройства измеряют усилие или движения человека и на основании этого варьируют скорость или усилие, прилагаемое исполнительным механизмом (пневматическим приводом или электрическим приводом). Такое устройство описано, например, в патенте США 4917360, выданном на имя Yasuhiro Kojima, U.S. патенте США 6622990, выданном на имя Kazerooni, и патенте США 6386513, выданном на имя Kazerooni. Патент США 6622990 под названием "HUMAN POWER AMPLIFIER FOR LIFTING LOAD WITH SLACK PREVENTION APPARATUS" выдан на имя Kazerooni 23 сентября 2003 г. Когда оператор этих и подобных устройств отжимает рабочий орган вверх, шкив вращается и поднимает груз, а когда он отжимает рабочий орган вниз, шкив вращается в противоположном направлении и опускает груз. Подобную операцию выполняют в системах, имеющих то, что часто называют "поплавковый режим", когда в результате приложенного оператором направленного вверх или вниз усилия к самому грузу происходит перемещение груза с помощью системы.
Раскрытие изобретения
В описанных вариантах осуществления предложено несколько усовершенствований существующего электрического исполнительного механизма и подъемных систем. В широком смысле, усовершенствования облегчают стандартизацию конструкции исполнительного механизма с целью уменьшения числа компонентов, необходимых для изготовления и обслуживания широкого спектра подъемных систем, за счет чего различные исполнительные механизмы с различными диапазонами грузоподъемности имеют меньшее число различающихся компонентов. В результате модернизации также усовершенствовано несколько компонентов исполнительного механизма и соответствующих органов управления (например, подвесного пульта управления оператора) с целью повышения надежности, удобства эксплуатации и обеспечения наращиваемости органов управления.
В описанных вариантах осуществления раскрыт исполнительный механизм подъемного устройства, включающий: контроллер; электродвигатель для приведения в действие исполнительного механизма, при этом упомянутый электродвигатель в ответ на управляющие сигналы контроллера вращает барабан, на который наматывается и с которого разматывается проволочный трос, один конец которого прикреплен к барабану; и пульт оператора, установленный вблизи свободного конца проволочного троса, при этом упомянутый пульт оператора включает съемное подъемное приспособление и передает сигналы оператора контроллеру для управления работой исполнительного механизма.
Также описаны: рама, на которой подвешен свободно вращающийся электродвигатель, механический редуктор и барабан; датчик нагрузки, прикрепленный к раме, для определения нагрузки при вращении узла двигателя/редуктора/барабана, когда к не намотанному концу проволочного троса прикладывается нагрузка; датчик провисания для определения угла ориентации узла двигателя/редуктора/барабана и обнаружения состояния провисания в ответ на сигнал датчика провисания, который в одном из вариантов осуществления установлен на вращающемся узле; универсальный узел двигателя и редуктора, который может быть оснащен одним из множества дополнительных редукторов для изменения диапазона мощности исполнительного механизма; планетарный редуктор, механическая часть которого преимущественно помещается внутри барабана тросового шкива; направляющая троса для регулирования положения и сохранения целостности (плотности) намотки троса после его намотки на барабан или размотки с барабана; датчики регулируемого конечного положения троса, приводимые в действие в ответ на перемещение направляющей троса в крайнее осевое положение при намотке или размотке троса; и направляющая троса, включающая множество витков резьбы, сопряженные с канавками на барабане и обеспечивающие боковое усилие для перемещения направляющей при намотке или размотке троса. Упомянутые канавки также служат для фиксации местоположения проволочного троса на барабане, обеспечивая точное, однослойное размещение проволочного троса на барабане.
Применительно к различным альтернативным вариантам осуществления пульта оператора дополнительно описаны: рукоятка; шарнирное соединение для связи пульта с проволочным тросом, но с возможностью его поворота на 360 градусов относительно троса посредством дисковидного контактного кольца, способного обеспечивать электрические контакты и воздушный канал или воздуховод; спиральный датчик для измерения вертикальной составляющей отклонения рукоятки, связанной с сердечником, пропущенным через спираль с помощью гибкого волокна; жидкокристаллический дисплей на пульте для отображения информации о состоянии для оператора; бесконтактный оптический датчик приближения для обнаружения присутствия руки оператора на рукоятке во время работы; и быстро разъединяемое крепление байонетного или штифтового типа для инструментов, прикрепляемых к нижней части пульта.
Краткое описание чертежей
На фиг.1 схематически проиллюстрирован типичный вариант осуществления настоящего изобретения,
на фиг.2-4 представлены различные альтернативные варианты осуществления (например, с отличающейся допускаемой нагрузкой) узла привода исполнительного механизма в соответствии с различными особенностями единого замысла раскрытых вариантов осуществления,
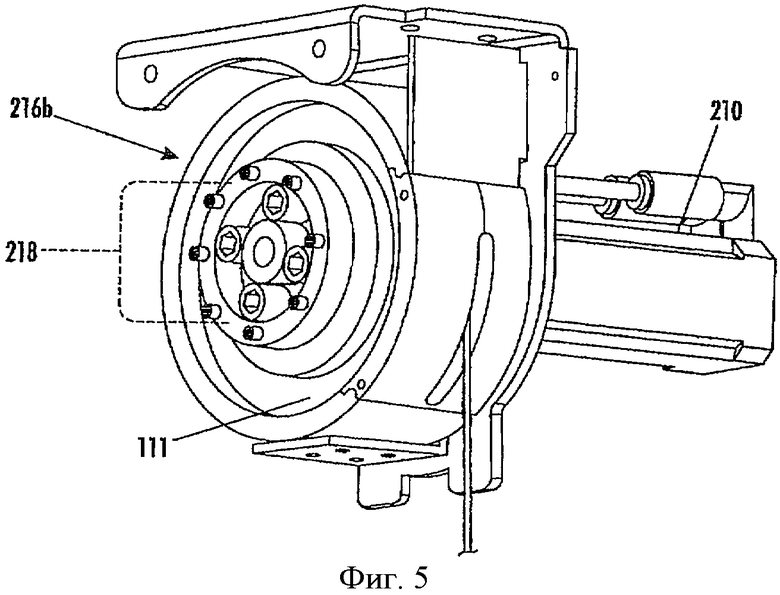
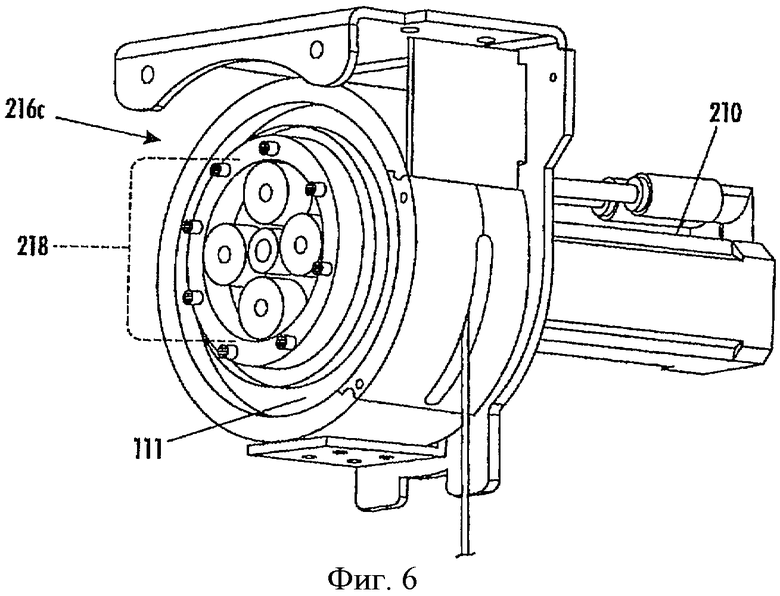
на фиг.5 и 6 представлены наглядные изображения планетарной передачи в сборе, иллюстрирующие альтернативные варианты осуществления, рассчитанные на различную допускаемую нагрузку,
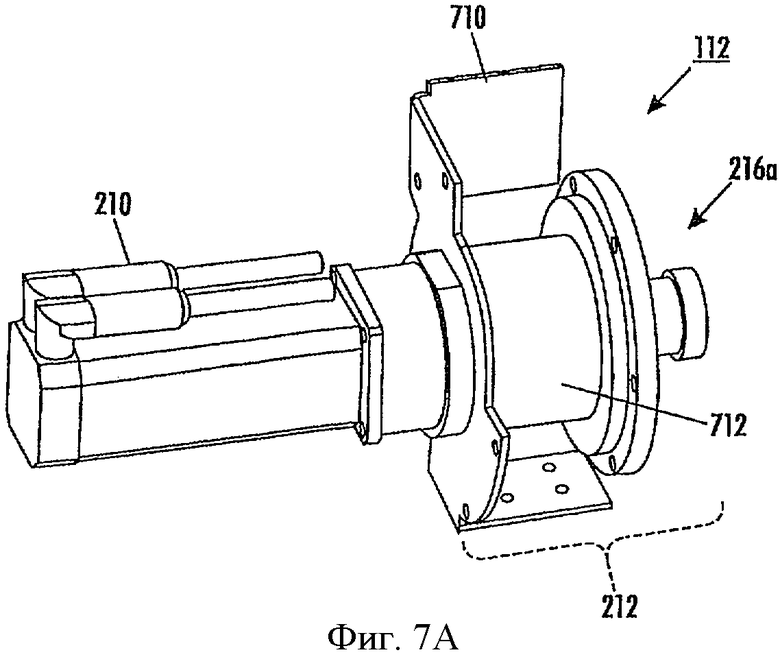
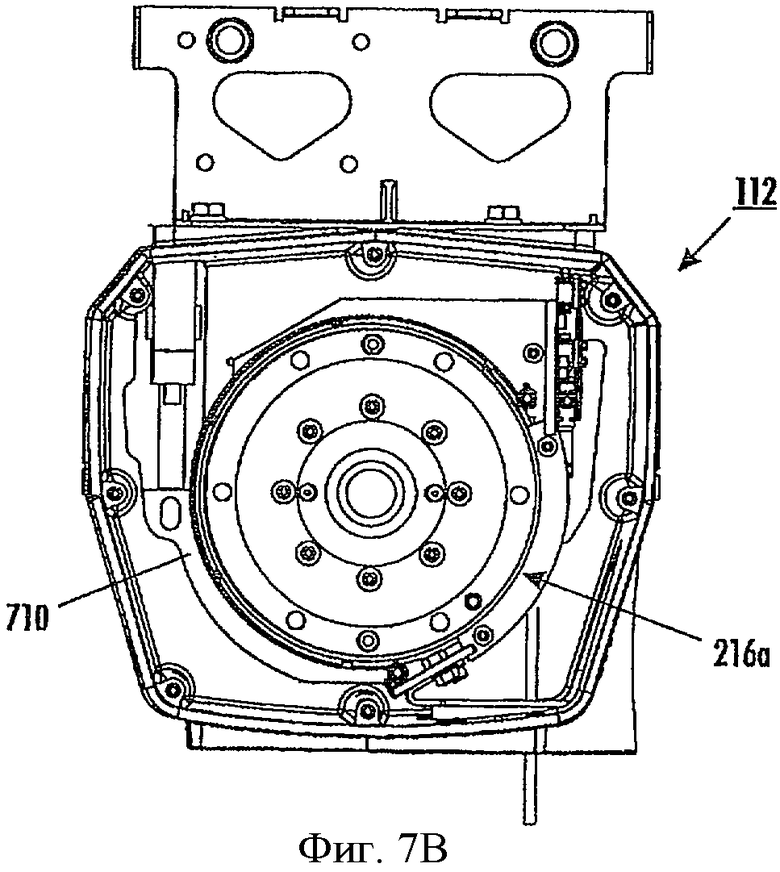
на фиг.7А-В и 8-11 представлены наглядные изображения усовершенствованной системы измерения нагрузки, применяемой согласно одной из особенностей раскрытых вариантов осуществления, в которой для определения нагрузки, прилагаемой посредством вращения узла привода относительно подвесной конструкции, используют тензодатчик,
на фиг.12A-12B показаны альтернативные варианты осуществления пульта оператора, используемого в соответствии с описанным изобретением,
на фиг.13А-13В показаны наглядные примеры компонентов и работы (фиг.13А, 13B) пульта оператора, показанного на фиг.12А,
на фиг.14 проиллюстрировано контактное кольцо в сборе, способное передавать электрические сигналы, а также воздух (текучую среду) на пульт оператора, показанный на фиг.12А,
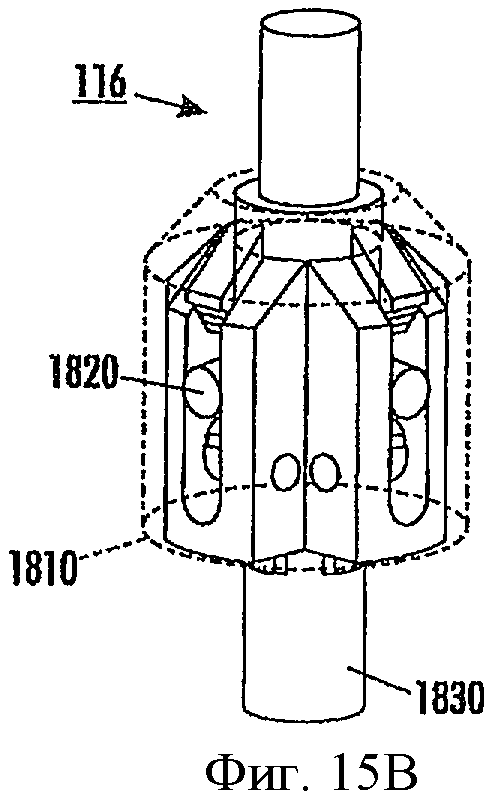
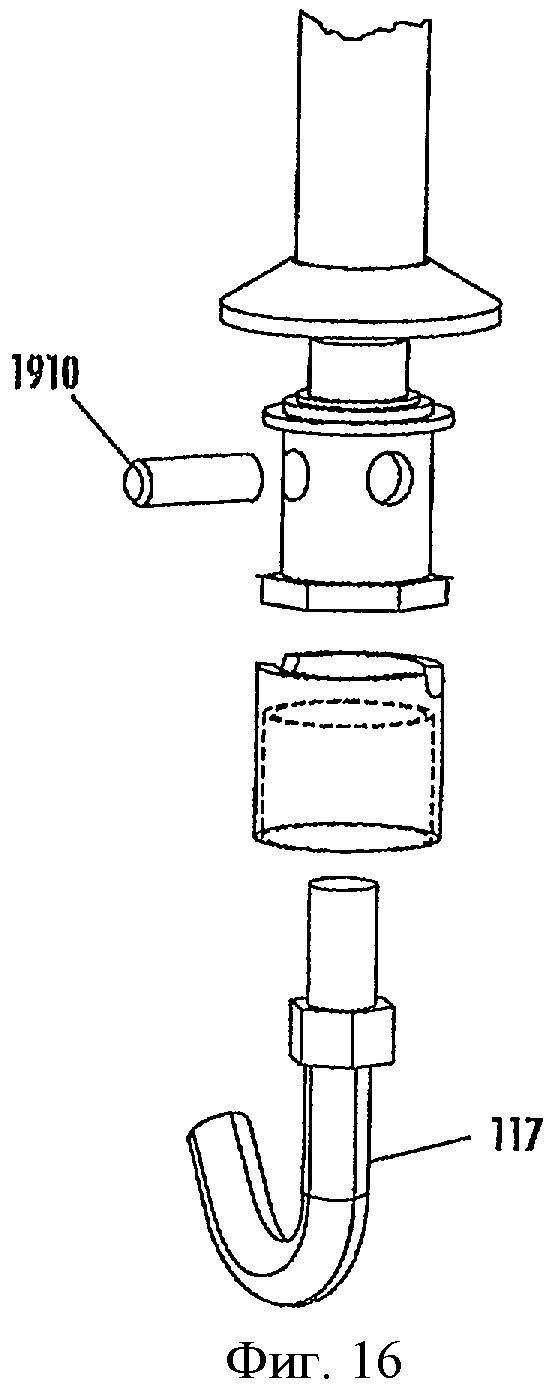
на фиг.15А-B и 16 подробно представлены альтернативные варианты осуществления пульта оператора, показанного на фиг.12А-B,
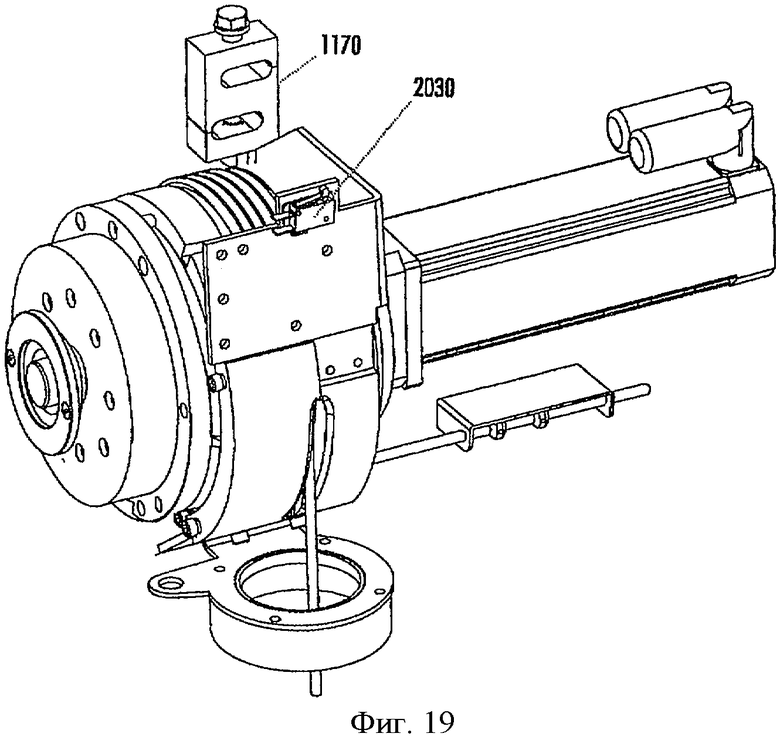
на фиг.17-19 подробно представлен вариант осуществления настоящего изобретения, в котором согласно одной из особенностей настоящего изобретения обнаруживают возможность состояния провисания проволочного троса,
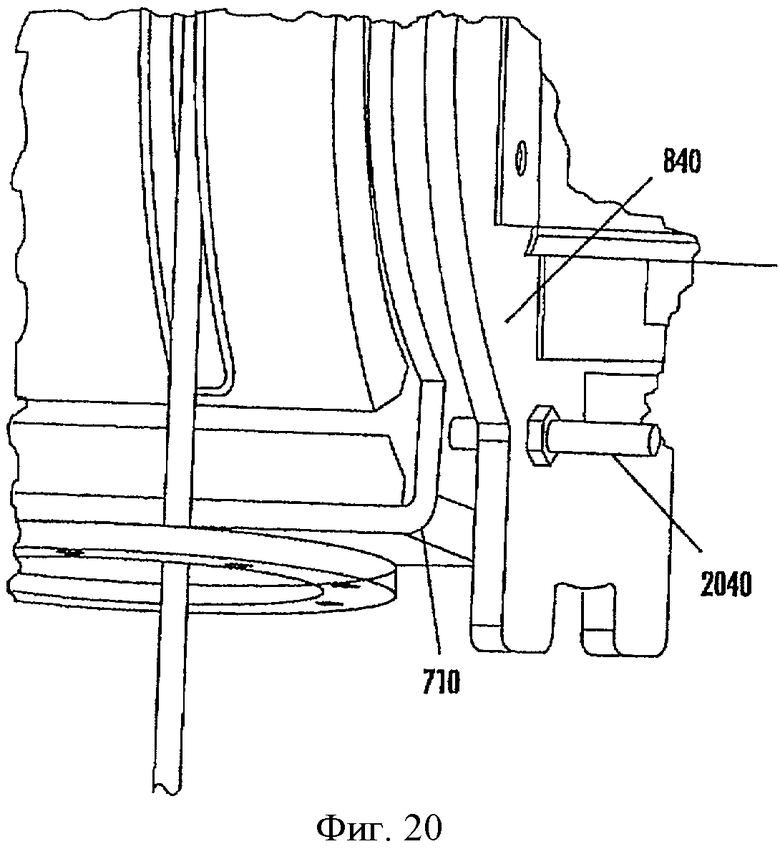
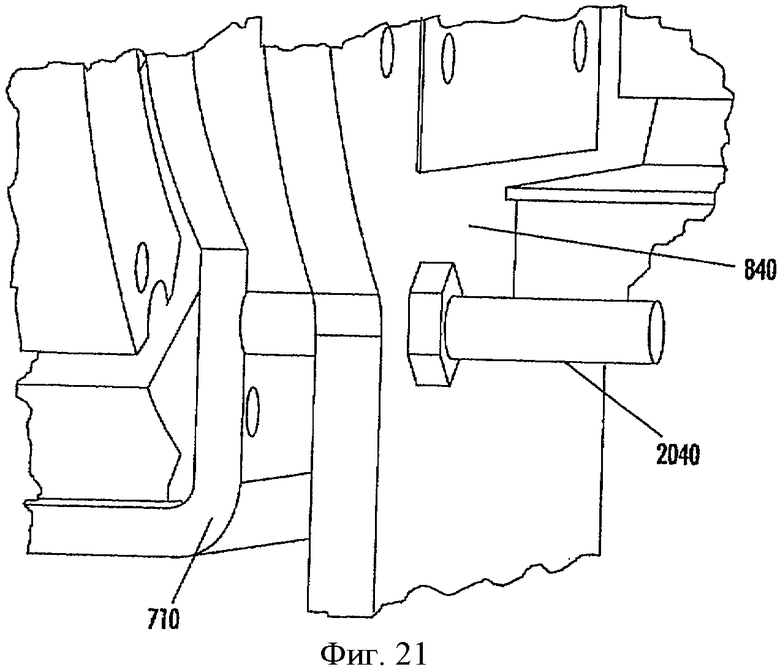
на фиг.20-21 представлен альтернативный вариант осуществления для обнаружения провисания, который может применяться согласно настоящему изобретению,
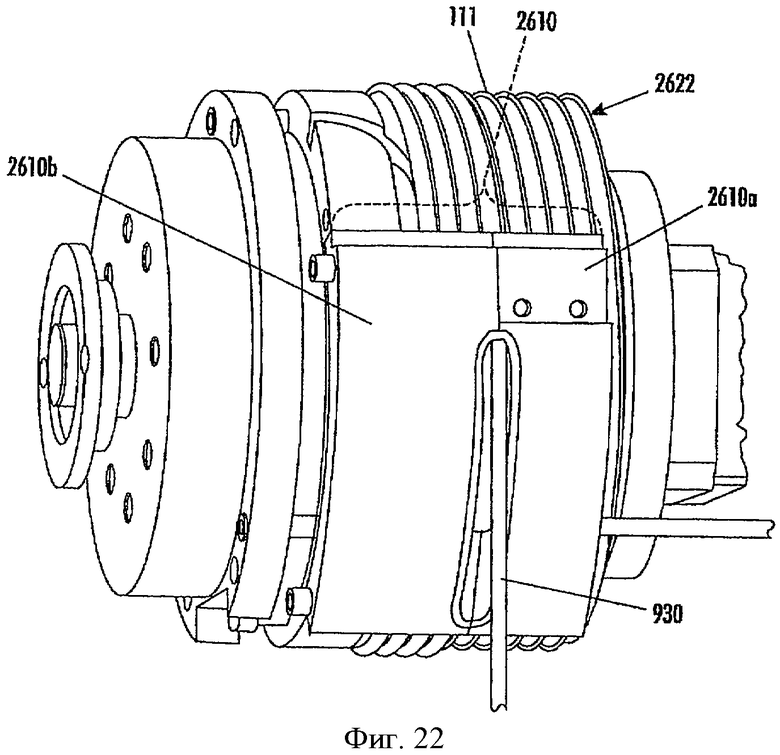
на фиг.22-24 подробно представлено усовершенствованные свойства управления тросом и крышки барабана, включая предотвращение провисания, в соответствии с одной из особенностей настоящего изобретения,
на фиг.25 и 26 проиллюстрирован вариант осуществления, в котором показанные на фиг.22-23 компоненты тросового затвора используют для определения пределов перемещения троса, и
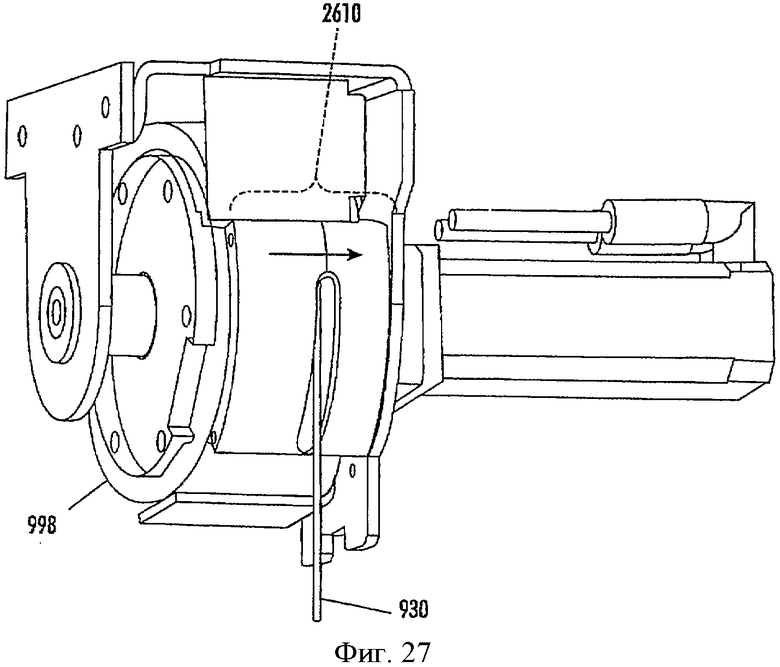
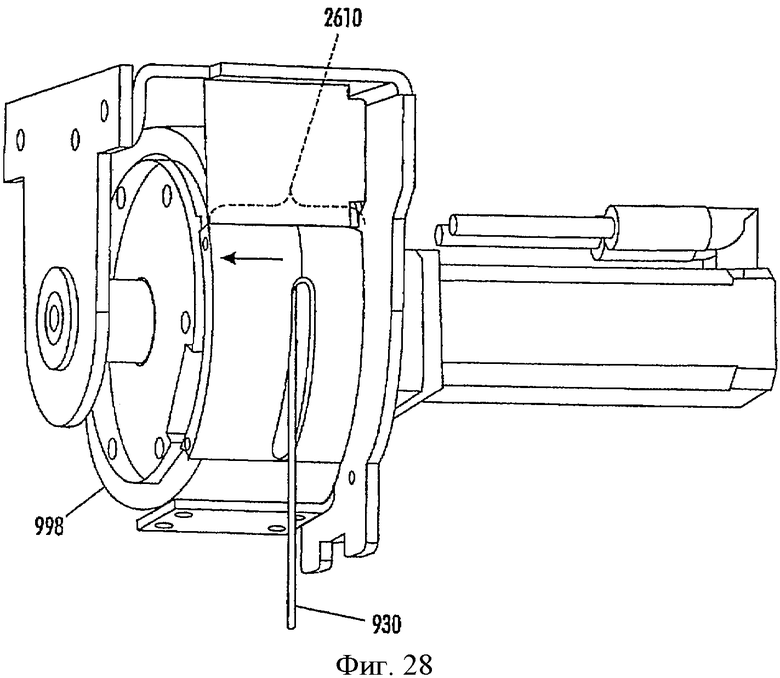
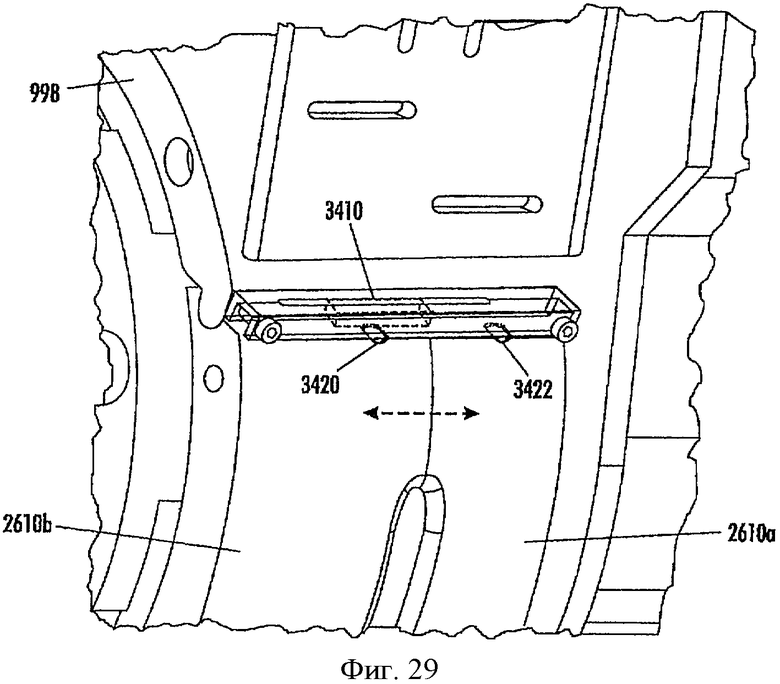
на фиг.27-29 проиллюстрирован альтернативный вариант осуществления для определения пределов перемещения троса с использованием показанных на фиг.22 и 23 затворов.
Предпочтительный вариант осуществления изобретения
Далее следует описание каждого из различных усовершенствований электрического исполнительного механизма подъемного устройства применительно к вариантам его осуществления. Вместе с тем, подразумевается, что ряд некоторых усовершенствований применимы или могут быть реализованы в исполнительных механизмах других типов или другом погрузочно-разгрузочном оборудовании в целом, и не ограничены конкретным электрическим исполнительным механизмом или подъемной системой, которая описана в настоящем изобретении. Чертежи выполнены не в масштабе, и для ясности некоторые их детали могут быть представлены в увеличенном виде.
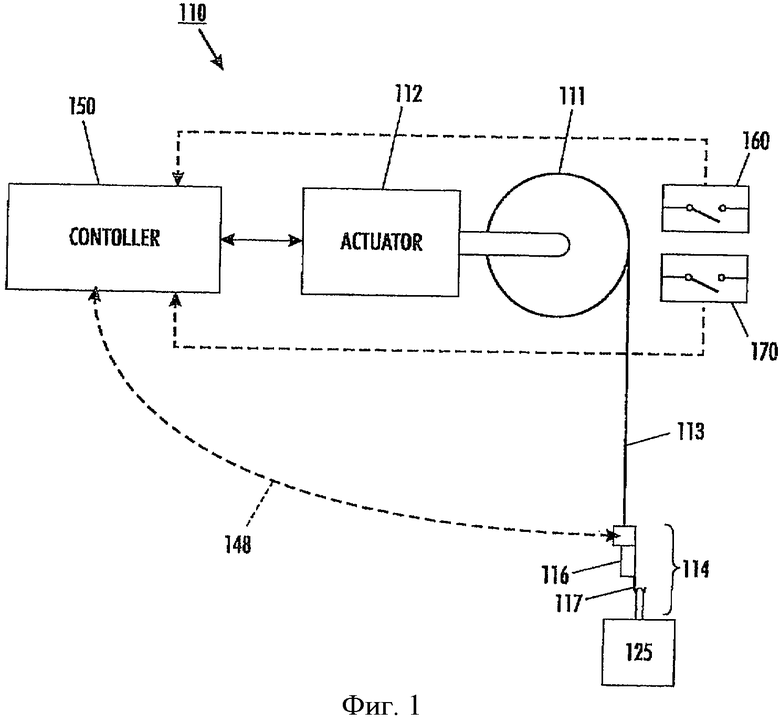
Рассмотрим фиг.1, на которой схематически представлен один из вариантов осуществления изобретения и показан приемный или приводной шкив и соответствующие механические узлы в типичном усилителе 110 физической способности человека. Расположенный в верхней части устройства приемный шкив 111 с приводом от исполнительного механизма 112 прикреплен непосредственно к потолку, стене или мостовому крану, стреле или подобной конструкции (не показана). Вокруг шкива 111 проходит трос или кабель 113, один конец которого прикреплен к шкиву, а противоположный конец свободен для крепления к грузу. Кабель 113, также называемый проволочным тросом, способен поднимать или опускать груз 125 при вращении шкива 111. Тросом 113 может являться трос, проволока, кабель, ремень, канат, проволочный канат, шнур, шпагат, струна, цепь любого типа или иной элемент, который может быть намотан на шкив или барабан и способен обеспечивать подъемную силу в отношении груза. К тросу 113 прикреплен рабочий орган 114, который включает подсистему взаимодействия "человек-машина" (например, рукоятку или выносной пульт 116 управления) и подсистему 117 взаимодействия "груз-машина", которая в данном варианте осуществления включает съемный крюк, но также может включать пару чашечных присосов или подобные средства захвата груза. В вариант осуществления с использованием чашечных присосов входит, но не показан, воздушный шланг для вакуумирования чашечных присосов.
В одном из вариантов осуществления исполнительным механизмом 112 является электродвигатель с трансмиссией, но в качестве альтернативы им может являться двигатель с электрическим приводом без трансмиссии. Кроме того, исполнительный механизм 112 также может питаться от энергии других типов, включая пневматическую, гидравлическую или альтернативные виды энергии. С точки зрения настоящего описания трансмиссиями являются механические устройства, такие как шестерни, шкивы и т.п., увеличивающие или уменьшающие растягивающее усилие троса. Шкив 111 может быть заменен барабаном или воротом или любым механизмом, способным преобразовывать вращательное или угловое движение, сообщаемое исполнительным механизмом 112, в вертикальное перемещение для подъема или опускания троса 113. Хотя в данном варианте осуществления исполнительный механизм 112 непосредственно снабжает энергией приемный шкив 111, исполнительный механизм 112 может быть установлен в другом месте и передавать энергию приемному шкиву 111 посредством другой системы передачи, такой как узел цепей и звездочек. Исполнительный механизм 112 предпочтительно срабатывает по команде электронного контроллера 150, который принимает от рабочего органа 114 сигналы, поступающие по кабелю передачи сигналов (не показан), электропроводке или подобному средству передачи сигналов. Подразумевается, что существует несколько способов передачи электрических сигналов, а передающим средством может являться альтернативное средство передачи сигналов, включающее средство беспроводной передачи (например, радиочастотной, оптической и т.д.). В одном из вариантов осуществления настоящего изобретения предусмотрен специально сконструированный спиральный шнур 148, в который специально запрессован спиральный кабель управления и/или воздушный канал таким образом, чтобы такой шнур сохранял свою форму (например, навитую на трос 113).
Помимо органов управления на пульте оператора может использоваться один или несколько датчиков для обеспечения функциональных и/или защитных характеристик системы. Например, контроллер 150 может принимать сигнал датчиков (например, переключателей), таких как датчик 160 провисания, датчик 170 пределов перемещения кабеля 170, тензодатчик 1170 (например, фиг.10, 11) или датчик 1710 присутствия оператора (фиг.17).
В одном из вариантов осуществления контроллер 150 имеет три основных компонента.
1. Схему управления, включающую аналоговую схему, цифровую схему и/или компьютер с функциями ввода-вывода и стандартными периферийными устройствами. Схема управления обрабатывает информацию, получаемую в различных входных сигналах, и генерирует сигналы команд для управления исполнительным механизмом (посредством усилителя мощности).
2. Усилитель мощности, передающий энергию исполнительному механизму в ответ на команду схемы управления (например, тензодатчика, определяющего усилие в связи с нагрузкой). Обычно усилитель мощности принимает энергию из источника питания и подает соответствующее количество энергии в исполнительный механизм. Количество электроэнергии (ток и/или напряжение), подаваемое усилителем мощности в исполнительный механизм 112, зависит от сигнала команды, генерированного в компьютере и/или схеме управления. Подразумевается, что могут использоваться различные конфигурации привода с двигателем и усилителем в зависимости от требований к подъемному устройству. В одном из вариантов осуществления предпочтительной системой привода с двигателем является ACOPOS Servo Drive, производимая компанией B&R Automation под номером изготовителя 8V1016.50-2. В одном из вариантов осуществления дополнительно предусмотрено использование других модулей в сочетании с этим приводом, таких как ЦП (например, ACOPOS 8АС140 или 8АС141), модуль ввода-вывода (например, 8АС 130.60-1) и подобных компонентов для осуществления функций управления.
3. Логическую схему, состоящую из электромеханических или твердотельных реле, переключателей и датчиков для запуска и останова системы в ответ на последовательность возможных событий. Например, реле используют для запуска и останова работы всей системы с использованием двух нажимных кнопок, установленных на контроллере или рабочем органе. Реле также включают фрикционный тормоз (не показан) в случае перерыва в подаче энергии или отлучки оператора. Обычно логическая схема может иметь различные архитектуры и детальное проектирование в зависимости от применения. В одном из вариантов осуществления может использоваться логическая схема, подобная схеме, используемой в подъемном устройстве G-force, производимом и продаваемом компанией Gorbel, Inc.
Как подробно описано в патенте США 6622990, подсистема 114 взаимодействия "человек-машина" может иметь ручной захват, и измеряет прилагаемое человеком усилие, т.е. усилие, прилагаемое оператором к подсистеме 114 взаимодействия "человек-машина". В одном из вариантов осуществления прилагаемое человеком усилие определяет тензодатчик 1170 (например, фиг.10, 11) или подобный датчик, генерирующий выходной сигнал, что более подробно описано далее, при этом уровень выходного сигнала, генерированного датчиком нагрузки, зависит от нагрузки, прилагаемой оператором к рабочему органу, и ее суммируют или вычитают из выдерживаемой нагрузки.
Подсистема 117 взаимодействия "груз-машина", что также более подробно описано далее, является съемным или настраиваемым механизмом, сконструированным для взаимодействия с грузом, и включает различные фиксирующие, зажимные или другие настраиваемые устройства для захвата груза. Конструкция подсистемы взаимодействия "груз-машина" зависит от геометрии груза и других факторов, связанных с операцией подъема. Помимо крюка 117 другие средства взаимодействия с грузом могут включать чашечные присосы, а также различные крюки, зажимы и захваты и подобные средства для соединения с подсистемами взаимодействия "груз-машина". Для подъема тяжелых предметов подсистема взаимодействия "груз-машина" может включать множество средств взаимодействия с грузом (т.е. множество крюков, зажимов, захватов, чашечных присосов и/или их сочетаний).
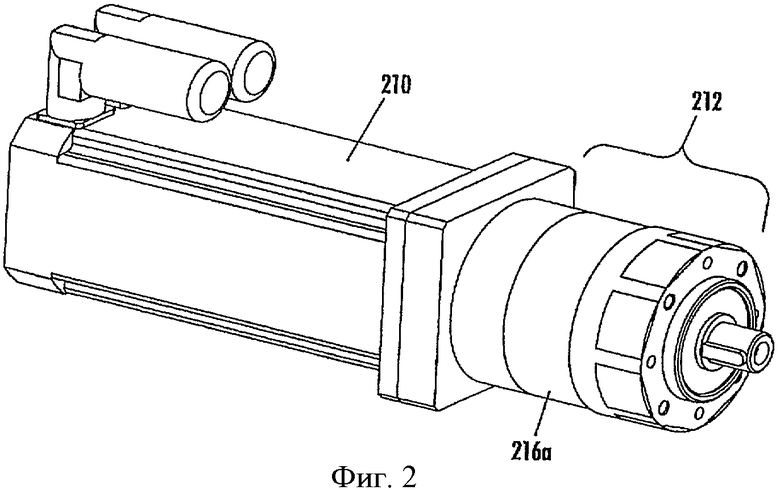
После описания компонентов подъемной системы перейдем к рассмотрению различных особенностей настоящего изобретения. Одной из особенностей является то, что система исполнительного механизма создана по "блочному" принципу. Блочный принцип построения в целом показан на фиг.2-6, на которых проиллюстрированы различные особенности конструкции. При создании по блочному принципу различные компоненты подъемной системы (например, исполнительный механизм, рукоятка, зубчатые редукторы и т.д.) проектируют таким образом, чтобы их можно было использовать в подъемных устройствах множества моделей и типов (Easy Arm(тм), G-Force(тм) и т.д.). С учетом того что в некоторых ситуациях характеристики подъемного устройства, такие как грузоподъемность, должны быть заданы по заказу, конструкции были также подвергнуты анализу с целью определить, какие компоненты, если таковые существуют, могут применяться в качестве общих или универсальных, и какие должны быть выбраны по заказу.
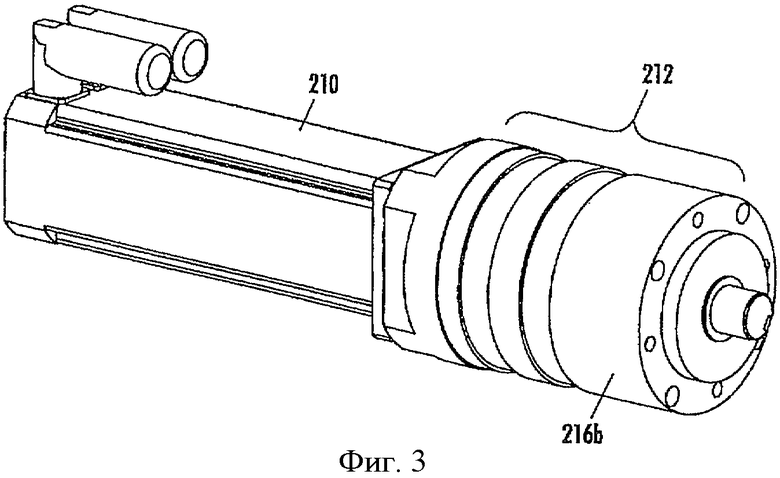
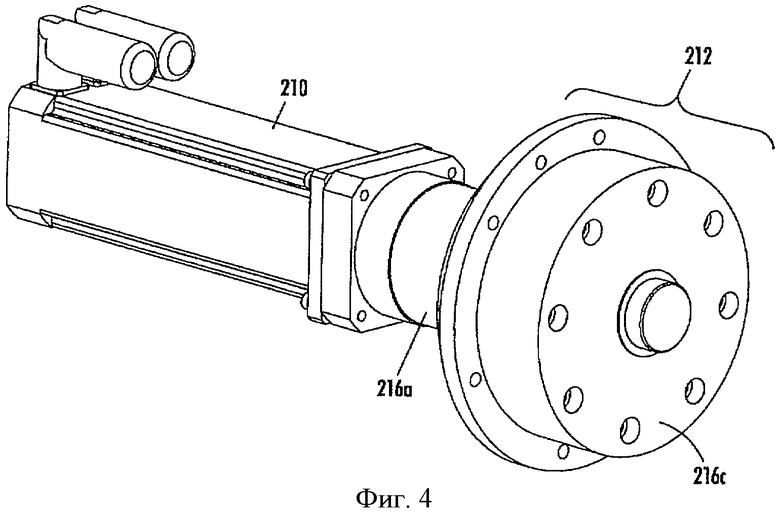
Один такой пример показан на фиг.2-4. Например, как показано на фиг.2, используется двигатель 210 и соответствующий редуктор 212, при этом один из двух или оба компонента могут использоваться в нескольких исполнительных механизмах, имеющих определенный диапазон грузоподъемности, как показано, например, на фиг.3 и 4. В устройстве малой мощности узел двигателя и редуктора имеет встроенный адаптер 216а барабанного шкива. Дополнительные редукторы не используются. На фиг.3 и 4 также показано, что вместо встроенного адаптера 216а барабанного шкива используется альтернативное (фиг.3) или дополнительное (фиг.4) средство понижения скорости в виде редукторов 216b и 216с, соответственно. Дополнительный редуктор 216b имеет такую конструкцию/размеры (например, планетарный зубчатый редуктор 218 внутреннего зацепления; фиг.5), чтобы двигатель 210 мог поднимать груз большого веса. На фиг.4 также показан дополнительный редуктор 216с, имеющий такую конструкцию/размеры, чтобы двигатель 210 мог поднимать грузы в другом диапазоне веса. За счет этого для множества диапазонов нагрузок исполнительного механизма может использоваться универсальный двигатель, а основным добавляемым/изменяемым компонентом является дополнительный редуктор(-ы).
Подразумевается, что в показанных вариантах осуществления используется зубчатый редуктор наращиваемой блочной конфигурации, при этом редукторы 216а, 216b и 216с различаются грузоподъемностью, поскольку планетарный зубчатый редуктор 218 внутреннего зацепления имеет передаточные отношения, различающиеся в различных моделях. При наименьшей грузоподъемности вместо дополнительного редуктора используют простой адаптер. При наибольшей грузоподъемности дополнительно используют второй или "наращиваемый" редуктор, при этом конструкцию второго редуктора выбирают в зависимости от желаемой грузоподъемности исполнительного механизма подъемного устройства. Если используют отличающийся или альтернативный (и планетарный) редуктор, также аналогичным образом изменяют или перепрограммируют контроллер, чтобы соответствующим образом скорректировать характеристики привода с двигателем и согласовать возможности альтернативных редукторов и направление вращения двигателя.
Подразумевается, что конструкции привода исполнительного механизма, показанные на фиг.2-6, облегчают серийное производство с возможностью изготовления на заказ исполнительного механизма для конкретных применений, дополнительно способствуют эффективному обслуживанию, а также экономически выгодному мелкосерийному производству. Как также показано на фиг.5 и 6, в нескольких вариантах осуществления внутри барабанного шкива 111 используют редуктор. Планетарные зубчатые редукторы 218 внутреннего зацепления расположены внутри барабанного шкива 111, за счет чего экономится пространство, уменьшается вес и снижается стоимость в отличие от обычных систем, в которых редуктор установлен на одной оси с барабаном. За счет этого также улучшается баланс исполнительного механизма, поскольку он подвешен к наружной конструкции, такой как балка мостового крана. При расположении редуктора внутри барабана устройство является компактным, и его вес несколько уменьшается за счет меньшего расхода материала на барабан. Стоимость редуктора также может быть снижена за счет изготовления барабана из обычных труб, а не цельного блока, подвергаемого обработке на станке. Например, в одном из вариантов осуществления барабан может быть изготовлен из алюминиевого сплава или в качестве альтернативы из нейлона или подобного полимерного соединения, обеспечивающего соответствующие механические характеристики.
Специалисты в области подъемных систем поймут, что важной особенностью различных описанных вариантов осуществления является уменьшение веса таких систем. Чтобы на практике увеличить грузоподъемность подъемного устройства, необходимо также учитывать влияние увеличения грузоподъемности на несущую конструкцию подъемного устройства (например, тросов, консольных частей, шкивов и т.д.). Так, несмотря на возможность увеличения грузоподъемности, может потребоваться уменьшить вес самого подъемного оборудования, чтобы воспользоваться преимуществом увеличения грузоподъемности. Например, если грузоподъемность может быть увеличена на 25 кг, чтобы использовать ее увеличение, необходимо убедиться, что несущая конструкция способна выдерживать увеличенную грузоподъемность или уменьшить общий вес нагрузки на несущую конструкцию. Именно последняя задача решается за счет различных особенностей описанных вариантов осуществления. Уменьшение веса исполнительного механизма позволяет в большей степени использовать способность несущей конструкции выдерживать вес груза. Кроме того, за счет уменьшения веса исполнительного механизма облегчается перемещение подъемного устройства (с меньшими (ручными) усилиями, прилагаемыми оператором и с использованием двигателей (шкива) меньших размеров).
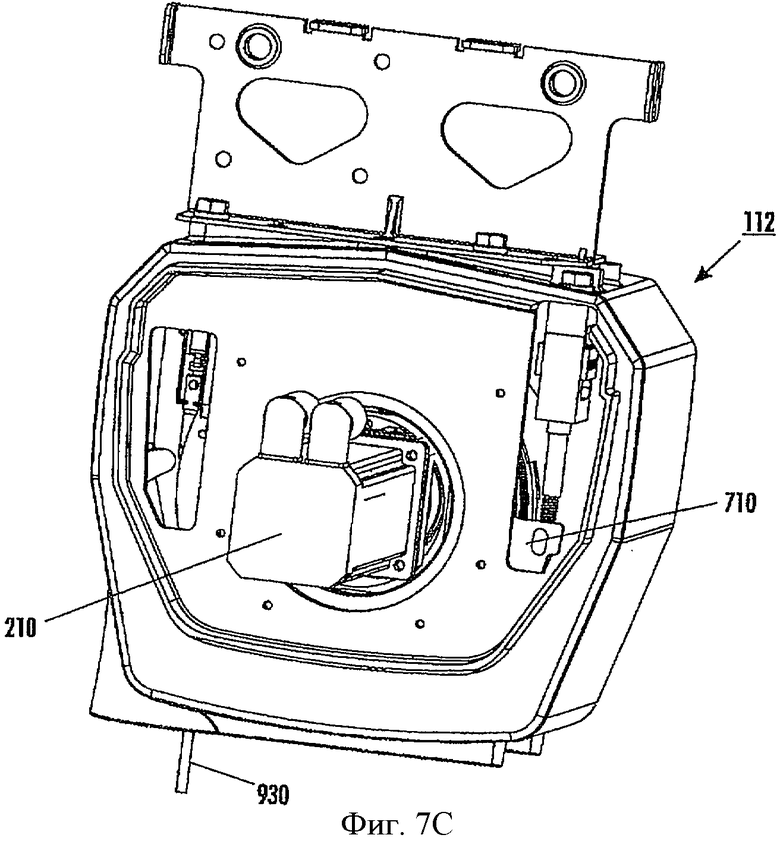
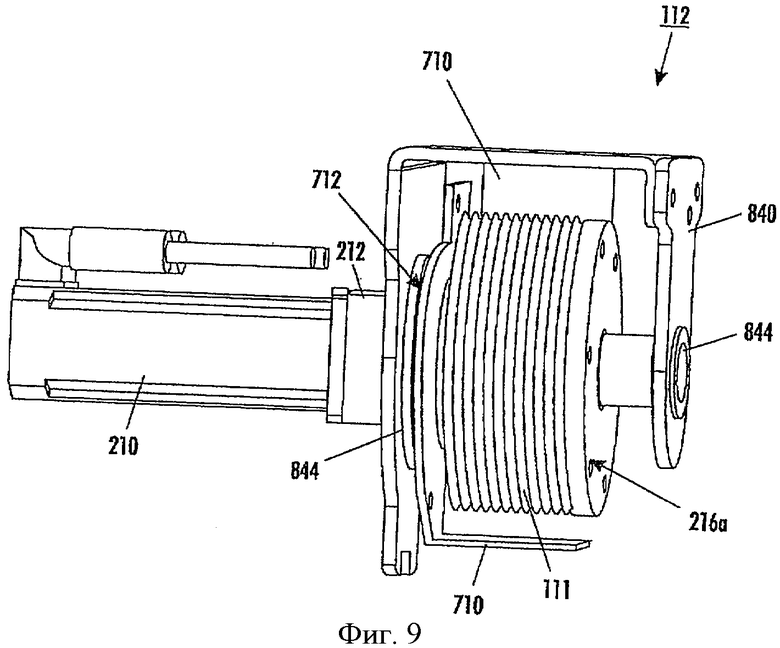
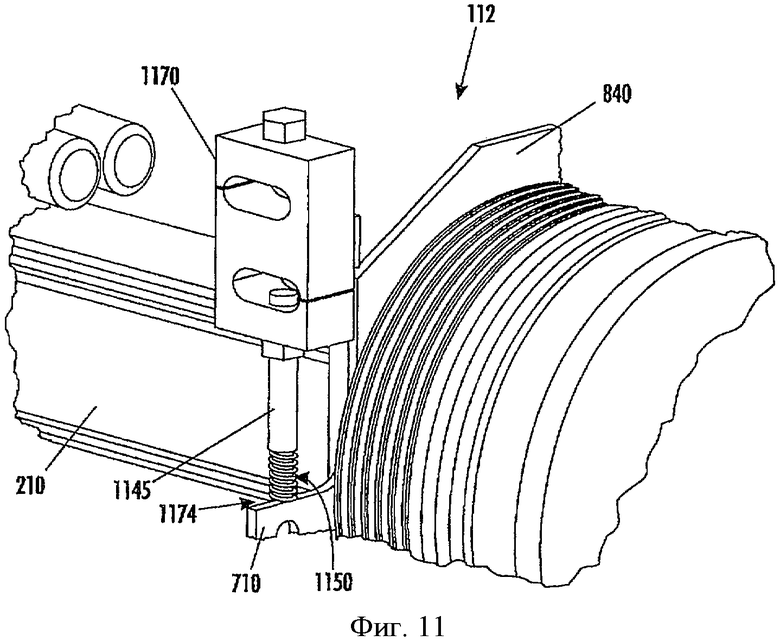
Далее рассмотрим фиг.7А-В и 8-10, на которых показаны дополнительные компоненты исполнительного механизма 112 согласно варианту осуществления, в котором нагрузка, выдерживаемая исполнительным механизмом, может быть непосредственно определена с помощью датчика сжимающей нагрузки. Исполнительный механизм 112 дополнительно включает кронштейн 710 или подобную конструкцию и втулку 712, которые механически соединены друг с другом и с барабанным шкивом 111. В одном из вариантов осуществления кронштейн 710 прикреплен к втулке таким образом, чтобы обеспечить поверхности для приведения в действие описанных в изобретении функций определения нагрузки и определения провисания и обеспечить принудительную остановку вращения в состоянии провисания. Как показано, например, на фиг.9, на втулку 712 также опирается дополнительный редуктор и барабанный шкив 111, на который намотан проволочный трос или кабель 930, один конец которого прикреплен к барабанному шкиву 111.
В одном из вариантов осуществления в исполнительном механизме 112 также используется изнашиваемое кольцо 999 из полиэтилена сверхвысокой молекулярной массы (UHMW) (отверстие тороидной формы в нижней части исполнительного механизма, через которое проходит проволочный трос 930). За счет использования изнашиваемого кольца увеличивается износостойкость по сравнению с обычными исполнительными механизмами. В другом варианте осуществления подразумевается, что за счет альтернативных конструкций исполнительного механизма может быть изменен способ соединения опорных консолей (например, кронштейна 710) с компонентами привода исполнительного механизма и/или крышками и корпусами, показанными на фиг.8. Например, в конструкции исполнительного механизма показанной на фиг.10, используется несколько отличающийся кронштейн и соответствующая опорная конструкция.
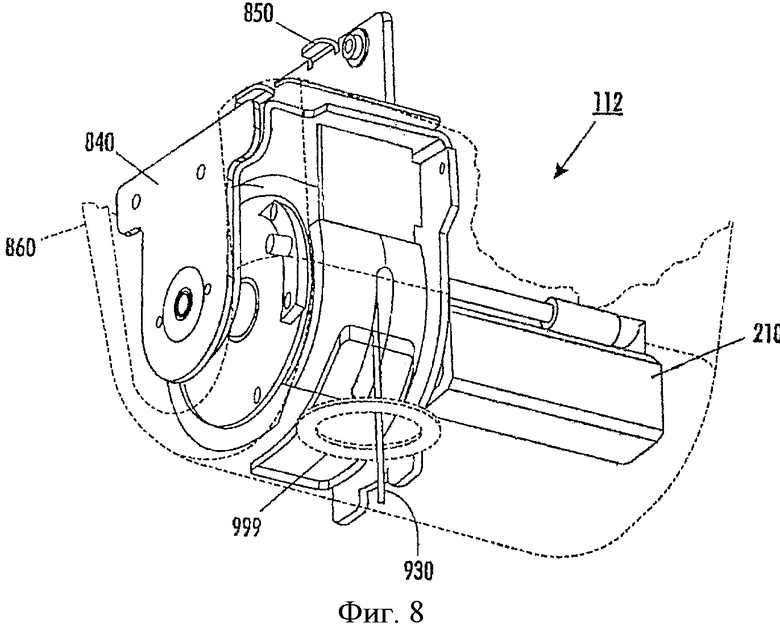
Исполнительный механизм 112 дополнительно включает подпятник 840, на который посредством подшипников 844 опирается барабан или дополнительный редуктор узла привода исполнительного механизма, но при этом подразумевается, что узел привода, включая барабанный шкив 111, втулку 712, опору спирального шнура и кронштейн 710, при необходимости способен, хотя и ограниченно, поворачиваться относительно подпятника, чтобы использовать тензодатчик для определения нагрузки на исполнительный механизм (вращение компонентов привода исполнительного механизма). Как показано на фиг.8, исполнительный механизм 112 дополнительно включает опорный элемент 850, который соединен с подпятником 840 и на котором подвешен исполнительный механизм за свою несущую конструкцию, такую как шкив или кронштейн (не показаны), а также корпус или кожух 860 (показанный на фиг.8 с вырезом), в котором помещаются рабочие элементы исполнительного механизма. Один из вариантов осуществления корпуса, применимого в показанном исполнительном механизме, описан, например, в заявке США на промышленный образец 29/256812.
Подразумевается, что помимо литых крышек могут применяться менее дорогостоящие крышки, за счет чего можно дополнительно снизить стоимость исполнительного механизма 112. Например, значительное снижение стоимости можно обеспечить за счет применения крышек или компонентов крышек, изготовленных из штампованного металлического листа или пластика и заготовок. Кроме того, существующие методы формования изделий из листовых материалов позволяют изготавливать изделия достаточно сложных форм, подобных тем, которые частично показаны на фиг.8 и описаны в упомянутой заявке на промышленный образец. В одном из вариантов осуществления, в котором применяют формованные металлические крышки, затворы или отверстия остаются без изменений, но остальная конструкция крышки может быть изменена для приведения в соответствие с альтернативными материалами и методами формования.
Помимо усовершенствованной универсальной конструкции привода электронный блок привода и управления, например ACOPOS Servo Drive, производимый компанией B&R Automation под номером изготовителя 8V1016.50-2, дополнительно обеспечивает улучшенные возможности ввода-вывода и дальнейшие усовершенствования конструкции за счет компонентов, готовых к немедленному применению (по принципу "включай и работай"). Характеристики готовности к немедленному применению различных компонентов - исполнительных механизмов, рукояток и т.д. позволяют контроллеру (не показан) подъемного устройства определять, рукоятка какого типа установлена на подъемном устройстве, и регулировать любые программируемые устройства управления или входы-выходы таким образом, чтобы обнаруженный компонент надлежащим образом работал с такой рукояткой. Конструкция по принципу "включай и работай" позволяет преодолеть недостатки, присущие обычным подъемным системам, в которых при изменении типа рукоятки или исполнительного механизма необходимо вносить изменения в механическую и электрическую части, за счет чего можно избежать трудоемких и дорогостоящих наладочных работ и производить изменения и модернизацию на месте.
Другим преимуществом, которое обеспечивает усовершенствованный контроллер, связанный с исполнительным механизмом 112, являются возможности дистанционной диагностики. В варианте осуществлении с использованием дистанционной диагностики контроллер включает схему связи для обмена информацией между контроллером исполнительного механизма и другим вычислительным устройством (например, рабочей станцией, контроллером крана и т.д.) посредством сетевого соединения (ЛВС/ГВС/Интернет). Согласно одной из особенностей настоящего изобретения возможности дистанционной диагностики позволяют осуществлять дистанционную конфигурацию, а также поиск неисправностей подъемного устройства, такого как исполнительный механизм.
Например, если пользователь в Детройте имеет затруднения с конкретным исполнительным механизмом, можно получить доступ к контроллеру этого исполнительного механизма (с помощью определенного сетевого IP-адреса или подобного идентификатора) из удаленного пункта или по меньшей мере получить данные от контроллера, находящегося в удаленном пункте, по сети Ethernet, через модем и/или Интернет и проверить и изменить настройки, а также решить любые проблемы функционирования. Предполагается, что возможности дистанционной диагностики и обслуживания значительно снизят затраты на уход и техническое обслуживание систем, поскольку в настоящее время обычно невозможно провести обслуживание подъемного устройства или решить проблемы функционирования без выезда специалиста на место работы или доставки исполнительного механизма на обслуживание. За счет этого значительно сократится время простоя устройства. Предполагается, что в контроллере будет использоваться стандартный протокол связи, такой как CANbus, а также другие хорошо известные технологии и протоколы цифровой связи, и он по меньшей мере будет способен выполнять и регистрировать элементарные функции диагностики, включая среди прочего передачу зарегистрированных сведений и записей эксплуатационных характеристик.
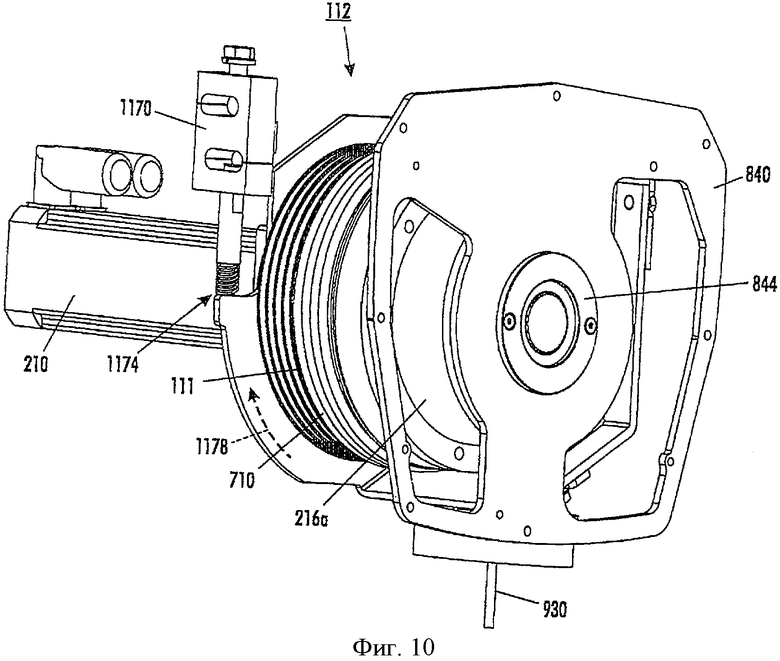
Как описано выше, конструкция исполнительного механизма 112 такова, что узел привода способен поворачиваться относительно подпятника 840. Такая конструкция облегчает использование датчика 1170 сжимающей нагрузки, что более подробно показано на фиг.10 и 11. В обычном подъемном устройстве с выравниванием нагрузки тензодатчик, как правило, встроен или связан с выносным пультом управления или рабочим органом, к которому прилагается или присоединяется нагрузка. Тем не менее, в таких системах необходимо использовать более сложные датчики нагрузки (тензометрические датчики и датчики сжатия), а также необходима своевременная и точная обратная передача сигналов контроллеру исполнительного механизма для регулирования нагрузки. Для них также требуются тензодатчики с более сложной и дорогостоящей централизацией сигналов для обеспечения приемлемой безопасности на случай отказа тензодатчика на выносном пульте управления. За счет установки датчика 1170 сжимающей нагрузки на подпятнике 840 барабана можно определять прилагаемое к кронштейну 710 вращательное усилие, которое создает груз, подвешенный к свободному концу кабеля 930. За счет размещения тензодатчика в корпусе исполнительного механизма вблизи систем управления также уменьшается путь передачи и улучшается качество сигнала, принимаемого контроллером 150 (фиг.1).
За счет того что тензодатчик не находится на пути нагружения, также повышается безопасность подъемных устройств, поскольку в случае отказа тензодатчика груз необязательно упадет. Следовательно, конструкция, показанная на фиг.10 и 11, позволяет определять нагрузку в точке поблизости от узла привода без использования в качестве "звена" подъемной системы. Компоненты узла привода (например, барабанный шкив 111, редуктор 212, адаптер/дополнительный редуктор (216а, b или с) и двигатель 210) вращаются вокруг оси на подшипниках 844 качения. С кронштейном 710 связана поверхность 1174 срабатывания, при этом кронштейн 710 в свою очередь соединен с втулкой 712, привинченной к установочной поверхности редуктора 212. К подпятнику 840 барабана прочно прикреплен датчик 1170 сжимающей нагрузки для определения усилия, прилагаемого поверхностью 1174 срабатывания. Когда оператор вручную прикладывает усилие к подвешенному грузу, приводной механизм вращается в направлении стрелки 1178 и изменяет усилие, приложенное к тензодатчику. Чем больше усилие, тем большее сжатие определяют датчики, и наоборот. Как показано на фиг.11, датчик усилия может иметь небольшую пружину 1150 перемещения на конце вала 1145 тензодатчика, которая "уравновешивает" собственный вес кабеля и/или выносного пульта управления на удалении от тензодатчика и, как описано далее, также играет важную роль при определении провисания. В альтернативном варианте осуществления настоящего изобретения предусмотрено, что нагрузку, прилагаемую к кабелю или подвешенному к нему выносному пульту управления, определяют путем контроля величины тока в двигателе с помощью контроллера и соответствующего программного обеспечения.
Дополнительное усовершенствование исполнительного механизма подъемного устройства может включать нормирование сигнала тензодатчиков. Помимо обработки сигнала тензодатчиков с целью применения в настоящем изобретении также предусмотрено, что для сигнала тензодатчиков может применяться единая нормирующая схема, при этом могут использоваться до трех или более тензодатчиков (например, для трех различных диапазонов нагрузок) и общая или универсальная нормирующая схема. В качестве альтернативы универсальному подходу к нормированию сигнала также могут быть предусмотрены отдельные схемы для различных тензодатчиков и выходных сигналов, которые они генерируют в зависимости от груза, подвешенного к кабелю, или нагрузки, приложенной к кабелю.
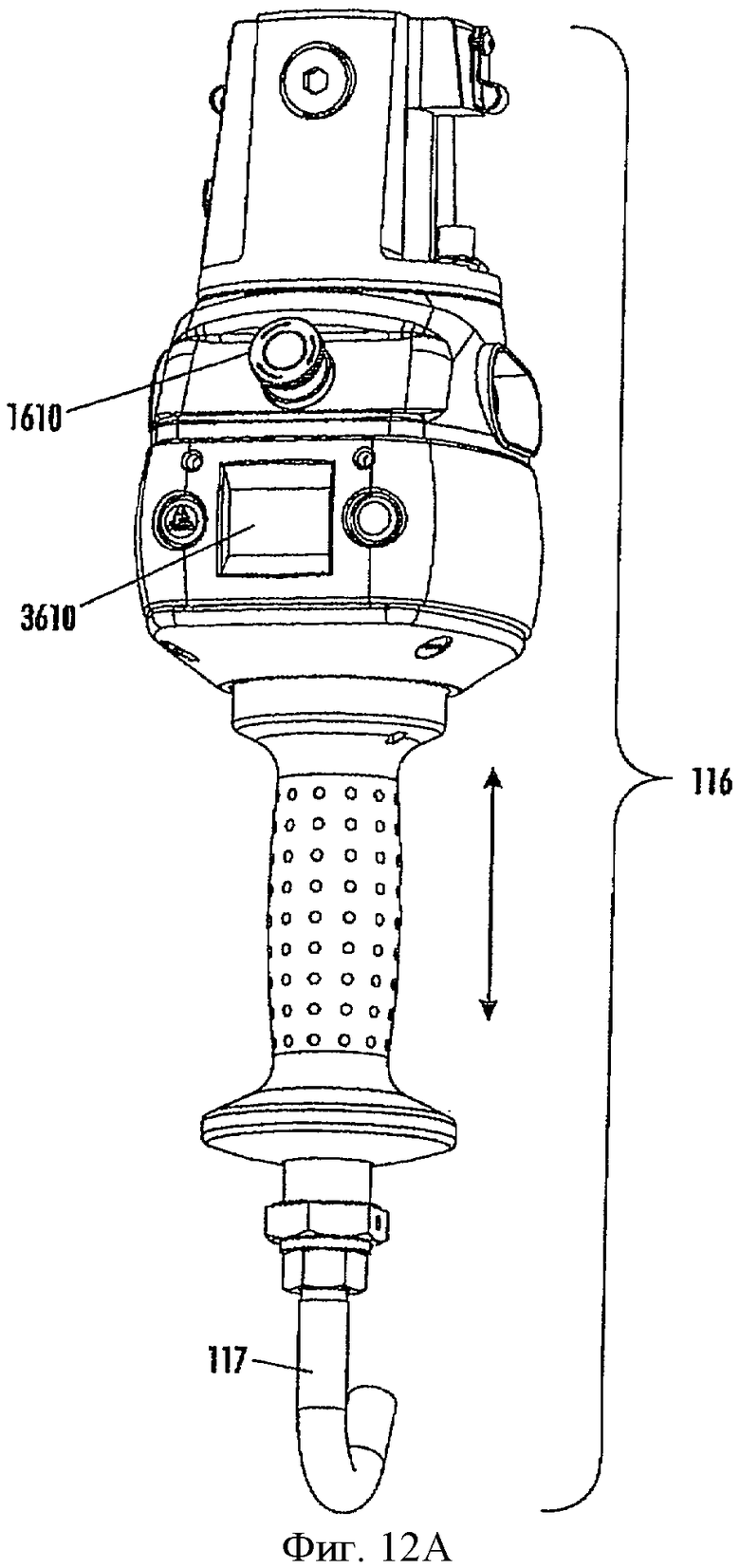
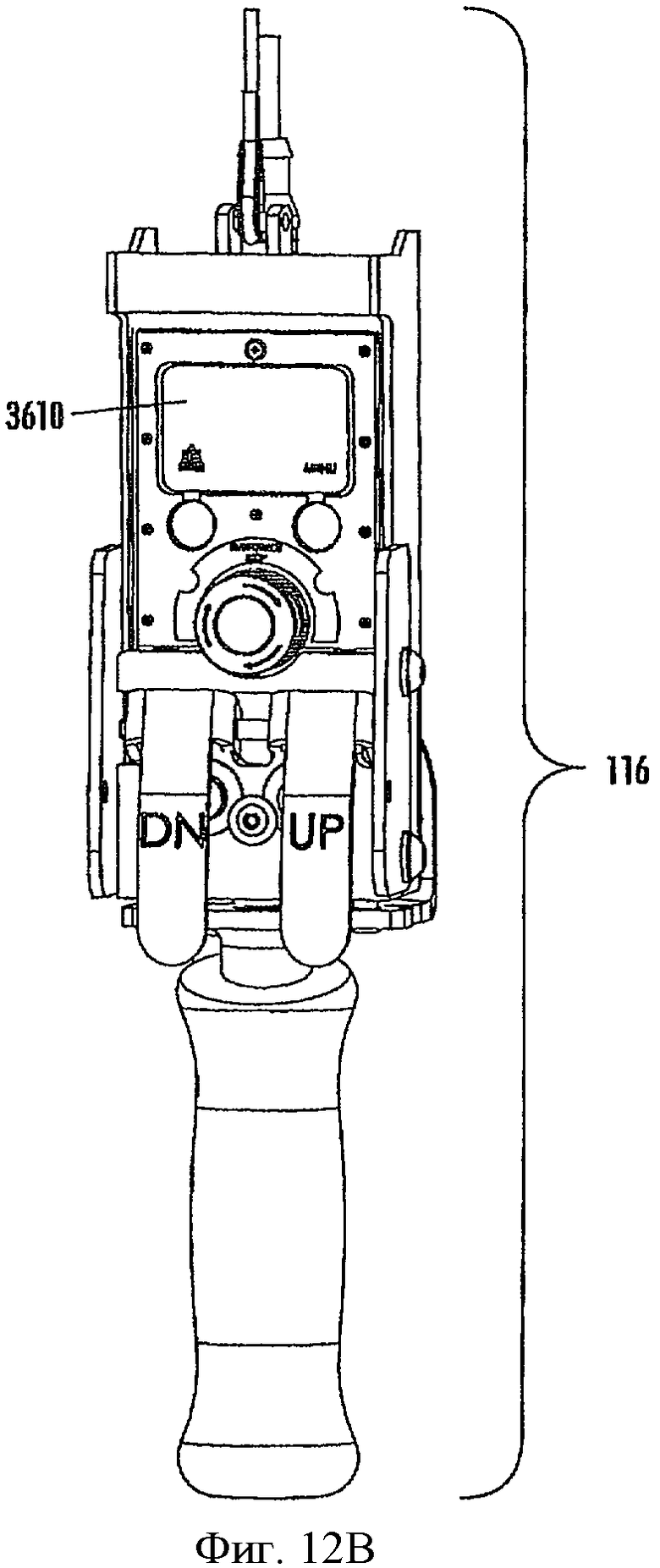
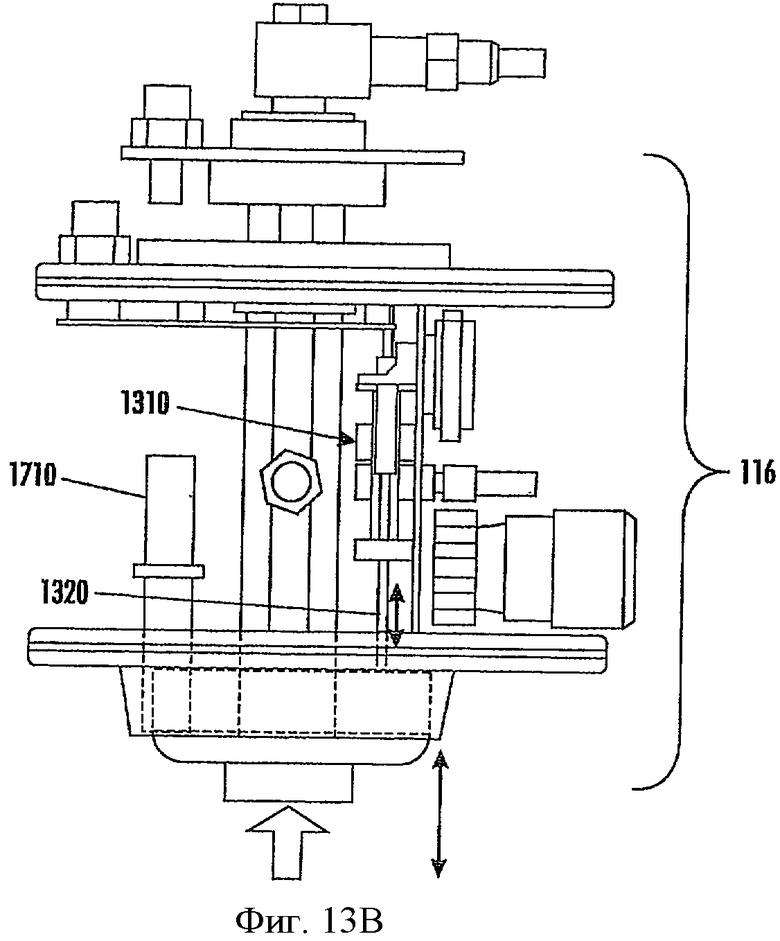
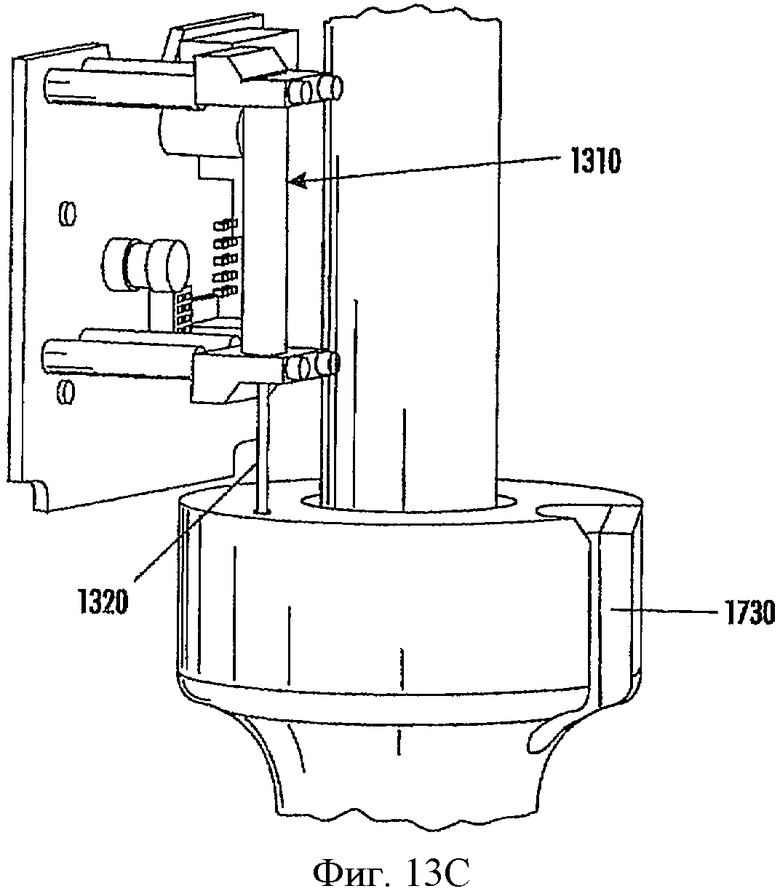
Далее рассмотрим фиг.12А-B, 13А-В и 14. На фиг.12А показано усовершенствованное электромеханическое устройство для определения намерений оператора на выносном пульте 116 управления. В качестве альтернативы в настоящем изобретении может использоваться выносной пульт управления, такой как показан на фиг.12B. Особенности такого выносного пульта управления описаны в опубликованной заявке США 2005/0207872 А1, поданной 21 марта 2005 г., заявитель - М.Taylor и др. (USSN 11/085,764). В обоих устройствах могут применяться различные устройства сигнализации (зрительной, звуковой, вибрационной), и они могут включать жидкокристаллические или аналогичный дисплей 3610 для отображения текущего рабочего состояния или иной информации для оператора.
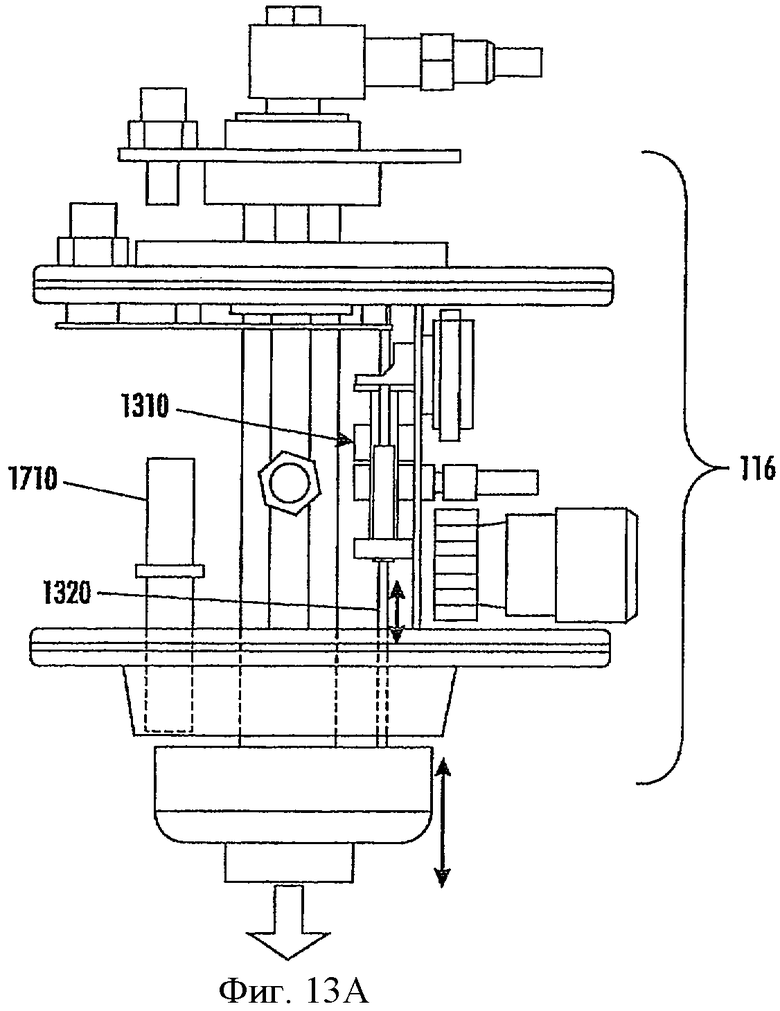
В показанном на фиг.12А варианте осуществления, который дополнительно проиллюстрирован на фиг.13А-В, сенсорное устройство включает спираль 1310 в отличие от традиционного измерительного преобразователя линейных перемещений (LVDT). В данном варианте осуществления спираль используют для обнаружения сердечника, состоящего из металлического стержня или аналогичного элемента, и для определения намерений оператора (подъема или опускания). В качестве дополнительного усовершенствования показанного варианта осуществления используют гибкое волокно 1320 для крепления сердечника к поверхности скольжения рукоятки 1716 управления оператора. Предполагается, что использование специально сконструированной спирали является менее дорогостоящей альтернативой промышленно производимым LVDT. Кроме того, использование гибкого волокна (например, из нейлона или подобного пластичного или гибкого материала) для соединения сердечника с рукояткой предотвращает срезание сердечника в ситуациях, когда к рукоятке приложен избыточный крутящий момент или она повернута под нагрузкой, а также предотвращает торможение системы, если она не полностью центрирована. Для обнаружения команд подъема или опускания оператора, проиллюстрированных на фиг.13А и 13B, соответственно, также могут использоваться LVDT или магнитные сенсорные устройства. В вариантах осуществления, показанных на фиг.13А и 13B, проиллюстрировано соответствующее перемещение рукоятки (большая стрелка внизу) относительно спирали.
Альтернативные средства обнаружения команды оператора, введенной посредством рукоятки, описаны, например, в патенте США 6386513 "HUMAN POWER AMPLIFIER FOR LIFTING LOAD INCLUDING APPARATUS FOR PREVENTING SLACK IN LIFTING CABLE", выданном на имя Kazerooni 14 мая 2002 г. и в заявке WO 2005092054 "ELECTRONIC LIFT INTERFACE USING LINEAR VARIABLE DIFFERENTIAL TRANSDUCERS", опубликованной 16 октября 2005 г. В одном из вариантов осуществления может использоваться выносной пульт управления, подобный тому, который описан, например, в находящейся одновременно на рассмотрении заявке США на промышленный образец 29/256811.
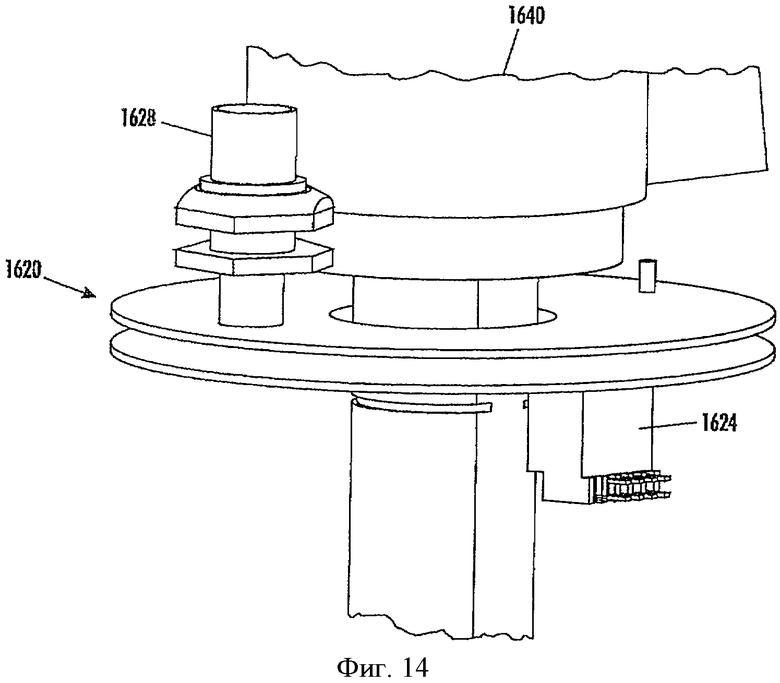
На фиг.14 показана другая особенность усовершенствованного выносного пульта управления, в котором используют контактное кольцо, позволяющее точно и надежно передавать выходной сигнал спирального датчика 1320, а также переключателя 1610 питания или сопутствующие электрические сигналы электрического соединителя 1624, исполнительному механизму 112 посредством кабеля управления со спиральным шнуром, который может быть вставлен в соединитель 1628. В данной конструкции в рукоятке управления используют дисковидное контактное кольцо 1620 с возможностью непрерывного поворота на 360 градусов независимо от проволочного троса и регулирования кабеля со спиральным шнуром. При повороте рукоятки специально сконструированное контактное кольцо передает электрические сигналы кабелю управления со спиральным шнуром. Специально сконструированное контактное кольцо также рассчитано на то, чтобы пропускать воздух (под давлением и/или разреженный) или другую сжатую текучую среду по центру через поворотное впускное отверстие 1640. За счет этого оператор может подавать энергию сжатого воздуха в концевую оснастку с одновременным непрерывным поворотом на 360 градусов.
Подразумевается, что соединения контактного кольца известны, но предполагается, что конструкция встроенного электрического и воздушного канала, которая обеспечивает беспрепятственный поворот, является усовершенствованной особенностью конструкции выносного пульта управления, ранее не применявшейся в области подъемных устройств.
Воздушный канал предпочтительно обеспечивает подачу сжатой текучей среды (например, под давлением, разреженной, гидравлической) в инструмент, связанный с выносным пультом управления. Усовершенствованная конструкция позволяет с небольшими затратами дополнительно регулировать или уменьшать приемлемую "габаритную высоту" выносного пульта управления.
Рассмотрим фиг.13А-В, на которой проиллюстрирована дополнительная особенность конструкции выносного пульта управления, согласно которой присутствие оператора (руки на рукоятке) обнаруживают с использованием индуктивного или предпочтительно отражательного фотоэлектрического датчика 1710. В одном из вариантов осуществления датчиком 1710 является трубчатый фотоэлектрический датчик (металл, 12 мм, PNP), при этом, когда датчик обнаруживает отраженный свет, отображающий присутствие руки оператора, включается световая индикация датчика. Подразумевается, что известны рукоятки безопасности различных альтернативных типов, хотя во многих из них необходим жесткий или длительный захват рукоятки 1716 управления оператора, что может привести к утомлению оператора, а также к путанице. Конструкция, показанная на фиг.13А-В, иллюстрирует фотоэлектрический датчик в качестве средства для обнаружения руки оператора подъемника при ее контакте с рукояткой управления без необходимости интерпретации пользователем, за счет чего предотвращается тенденция использования выключателя для включения и выключения устройства. Когда датчик включен, он передает обратный сигнал контроллеру, который затем позволяет подъемнику осуществлять операции подъема и опускания. Альтернативные датчики или переключатели для обнаружения руки оператора включают механический роликовый переключатель известных конструкций, датчик касания, индуктивный оптический датчик и мембранный датчик. Подразумевается, что расположение датчика в корпусе выносного пульта управления является предпочтительным во избежание его повреждения или вскрытия, хотя в таком случае рукоятка выносного пульта управления должна иметь отверстие 1730, через которое обнаруживают присутствие руки оператора.
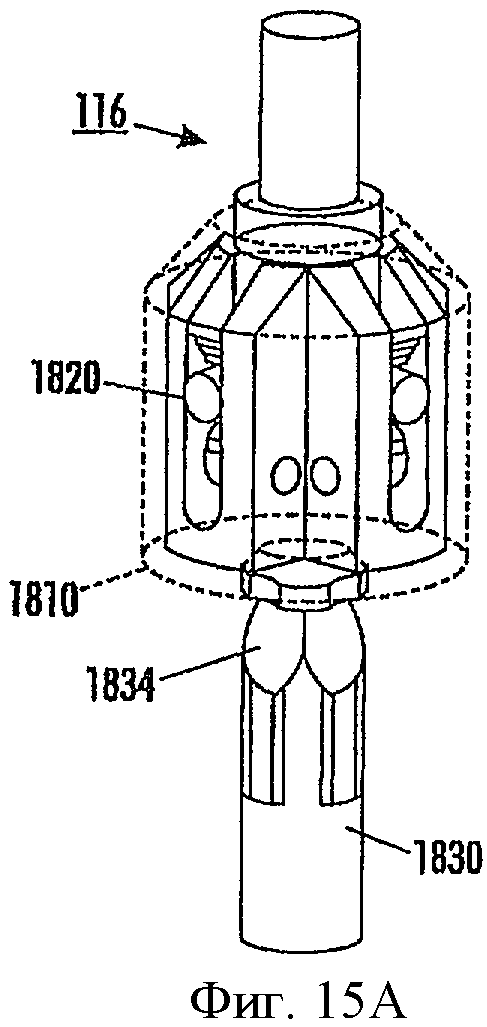
При различных применениях исполнительного механизма выносного пульта управления иногда требуется осуществить на месте замену или изменения в интерфейсе "груз-машина". Например, для подъема груза вместо крюка может потребоваться резьбовой соединитель и т.п. Рассмотрим фиг.15А-B, на которой показана конструкция с использованием быстро отсоединяемого адаптера в нижней части выносного пульта управления или рабочего органа 116, при этом оператор может быстро заменять концевую оснастку путем смещения вниз скользящего кольца 1810, чтобы втянуть стопорные пальцы 1820 и высвободить инструментальную оправку 1830. После этого можно быстро и легко установить другой инструмент, для чего перемещают его оправку вверх в установочное отверстие, втягивают стопорные пальцы и затем прочно фиксируют на месте, когда пальцы входят в канавки 1834 в оправке. Для замены концевой оснастки не требуются инструменты.
Специалисты в области подъемных систем поймут, что может применяться известный метод резьбового соединения или что в объем различных описанных вариантов осуществления входят альтернативные способы, требующие от оператора физического удаления пальца 1910 (фиг.16), чтобы высвободить оснастку.
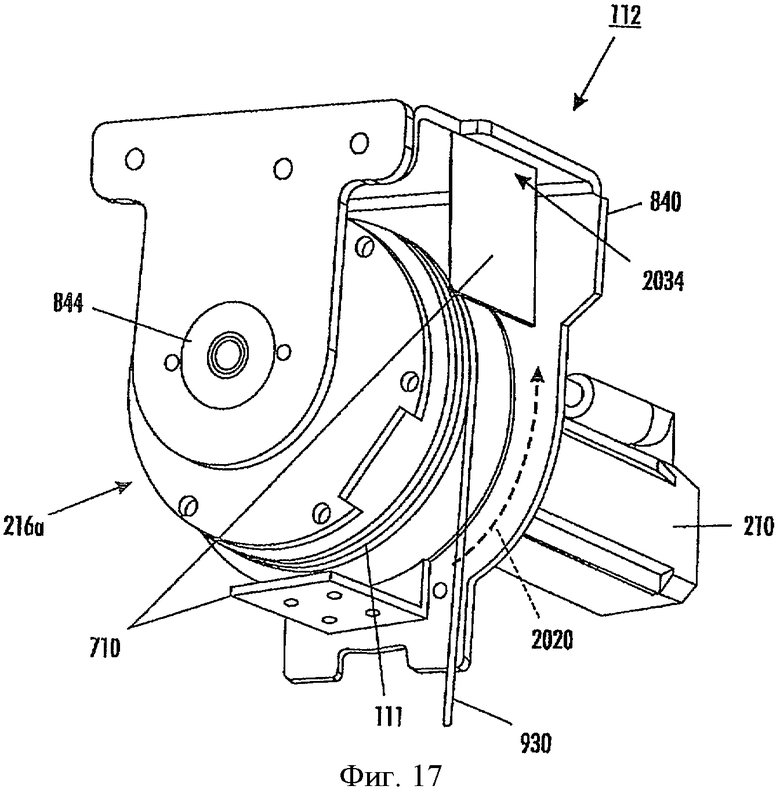
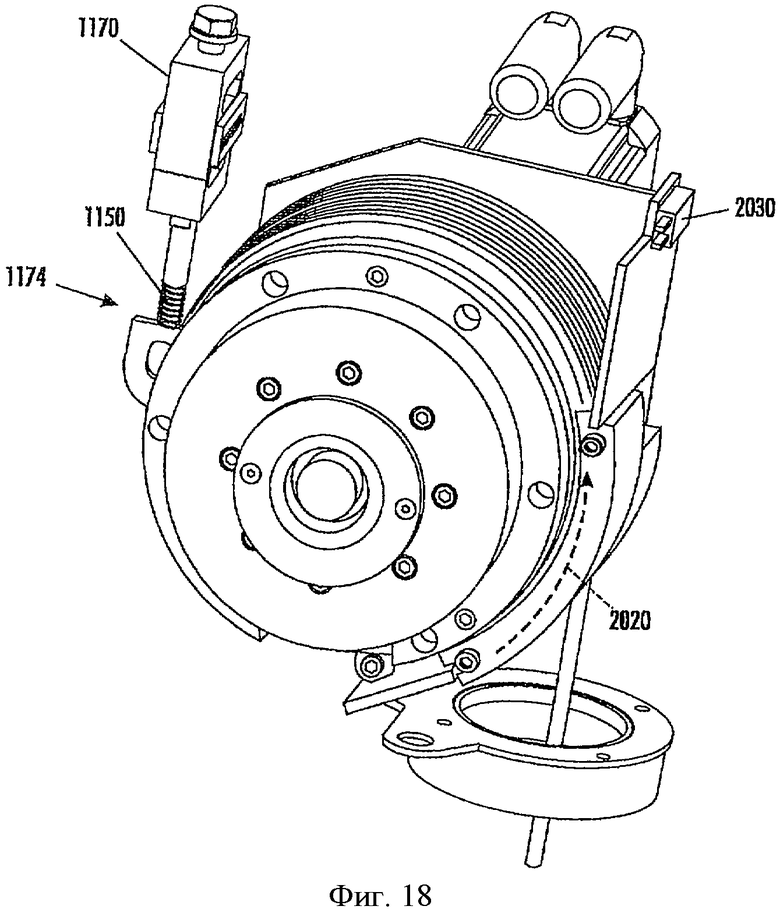
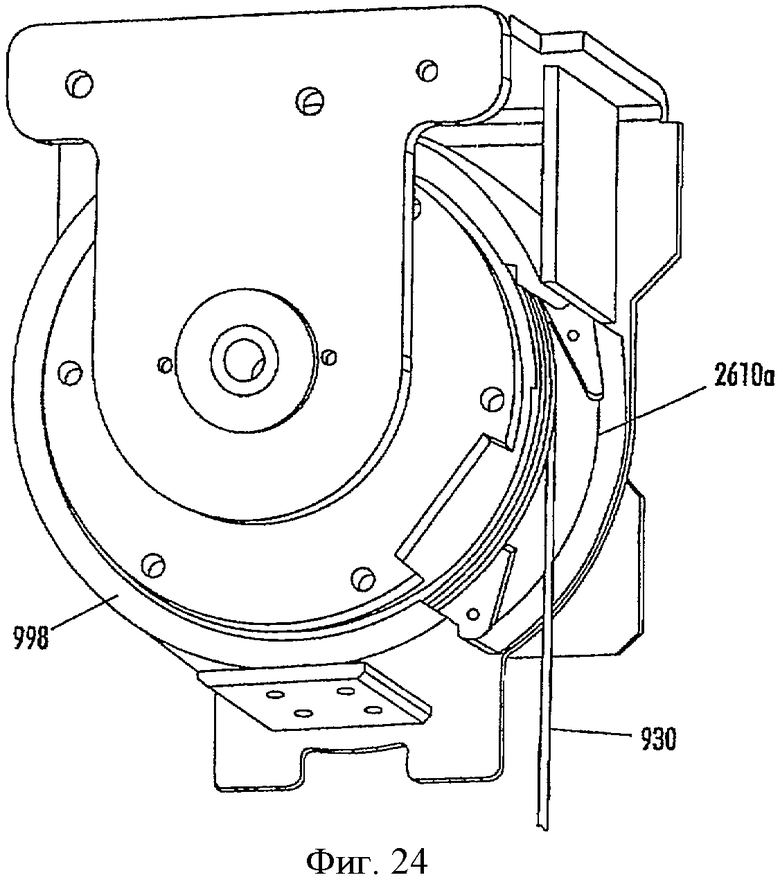
Далее рассмотрим фиг.17-21, на которых показаны особенности варианта осуществления настоящего изобретения с использованием усовершенствованной функции обнаружения провисания кабеля. В частности, как указано выше в отношении усовершенствованного определения нагрузки, в варианте осуществления исполнительного механизма, показанном на фиг.17-21, провисание кабеля обнаруживают с использованием вращения барабана, а также редуктора и двигателя (узла привода) (хотя и в противоположном направлении). В данной конструкции главный узел привода (барабанный шкив 111, редуктор (не показан) и двигатель 210) вращаются вокруг оси на подшипниках 844 качения. Плита срабатывания или кронштейн 710 соединены с втулкой, которая привинчена к установочной поверхности главного редуктора и также вращается вместе с узлом привода. Когда оператор снимает с проволочного троса 930 всю нагрузку за исключением веса рукоятки управления и соответствующей оснастки, возникает провисание троса. В случае провисания узел привода вращается против часовой стрелки (по стрелке 2020) за счет использования пружины 1150 сжатия (фиг.11). Чтобы облегчить пользователю применение разнообразной оснастки, необходимо обеспечить регулировку усилия пружины. Пружина 1150 сжатия установлена между тензодатчиком 1170 и поверхностью 1174 плиты срабатывания на одной оси со штифтом или валом нагружения тензодатчика. Когда узел привода вращается в условиях отсутствия нагрузки или провисания, микровыключатель 2030, установленный на главной опорной раме подъемника, обнаруживает присутствие плиты срабатывания (фиг.24) при соприкосновении с плитой срабатывания в точке 2034. Когда микровыключатель приведен в действие, он передает сигнал контроллеру (не показан), и программное обеспечение позволяет подъемнику осуществлять движение только вверх. В целях безопасности пользователя, если обнаружено провисание, контроллер не разрешает дальнейшую размотку проволочного троса вниз.
Подразумевается, что за счет использования вращения узла привода для определения нагрузки и обнаружения провисания устройство определения нагрузки может "видеть" любую нагрузку крутящим моментом и тем самым способно определять любую нагрузку, воспринимаемую как проволочным тросом, так и спиральным шнуром/воздушным шлангом. Иными словами, на датчик нагрузки воздействует сжимающая нагрузка, являющаяся непосредственным результатом веса груза. По мере подъема или опускания груза совокупная нагрузка также остается неизменной, несмотря на то, что относительные доли нагрузки, которые приходятся на спиральный шнур, воздушный шланг и проволочный трос, могут меняться. Поскольку весь проволочный трос и спиральный шнур в сборе поддерживает вращающийся узел привода, тензодатчик постоянно определяет их полный вес, и колебания высоты нагрузки не влияют на определение нагрузки или работу в поплавковом режиме. За счет данной схемы расположения сводится на нет любое потенциально вредное влияние усилия пружины и веса спирального шнура, например, на поплавковый режим.
В альтернативном варианте осуществления для обнаружения провисания может использоваться программное обеспечение, контролирующее ток двигателя с целью определения состояния провисания. Хотя это и возможно, остаются опасения по поводу надежности такого способа. Также предусмотрено, что вместо механического контактного выключателя (роликового выключателя и т.п.) для обнаружения вращения плиты 710 может использоваться бесконтактный датчик 2040 приближения. Такой вариант осуществления показан, например, на фиг.20 и 21, где датчик 2040 используют для обнаружения вращения плиты 710, чтобы обнаружить состояние провисания.
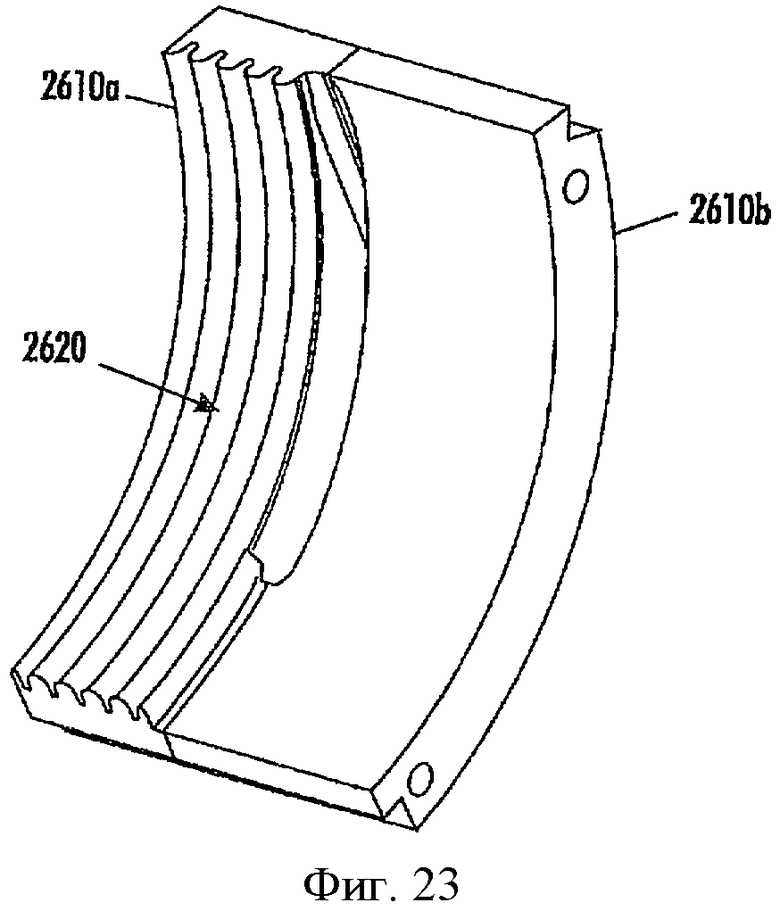
Далее рассмотрим ряд дополнительных особенностей усовершенствованного исполнительного механизма 112, который включает направляющее приспособление для барабанного шкива и проволочного троса (кабеля). Как показано на фиг.22-29, в усовершенствованной конструкции используется состоящий из двух элементов узел 2610 (2610а, 2610b и т.д.), охватывающий или установленный вокруг проволочного троса или другого подъемного средства и скользящий вперед и назад по направляющим, которые образованы крышкой 998 барабана (фиг.25). Скользящее движение узла 2610 обеспечивает резьба 2620, которой снабжена одна половина узла, обозначенная позицией 2610а, которая перемещается по открытым канавкам 2622 барабанного шкива 111.
Когда узел 2610 установлен вокруг троса 930, он обеспечивает скользящий затвор или отверстие, через которое проволочный трос 930 выходит из барабана, как показано на фиг.24. Помимо защиты кабеля и барабана такое устройство также предотвращает боковой износ канавок на барабане и обеспечивает тугое натяжение проволочного троса на барабанном шкиве, за счет чего предотвращается образование нежелательного провисания. Иными словами, затвор воспринимает боковые усилия проволочного троса, за счет чего он не изнашивает поверхность барабана, поскольку на входе в канавки барабана постоянно обеспечивается почти полное центрирование. Большая направляющая поверхность резьбы на затворе 2610а обеспечивает значительное боковое усилие и распределяет это усилие среди множества канавок на барабане, поскольку любое боковое усилие может возникать, только когда проволочный трос почти полностью размотан и канавки барабана вошли в сцепление с максимальным числом витков резьбы затвора. За счет того что эта половина затвора постоянно соединена с барабаном, можно обеспечивать совмещение при замене проволочного троса.
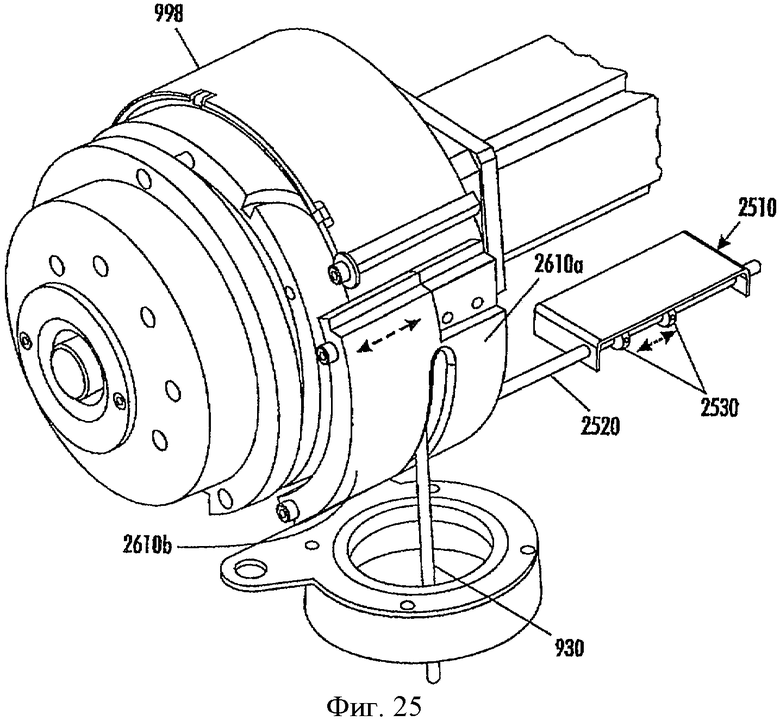
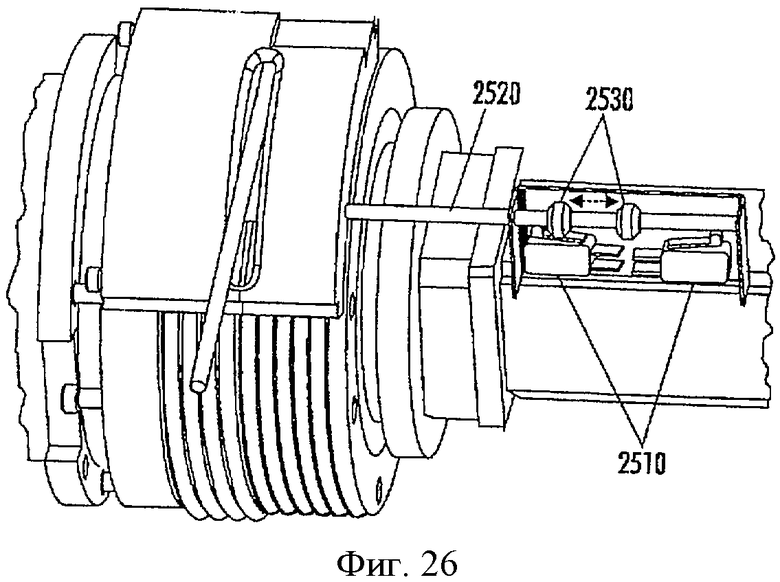
На фиг.24-29 показана другая особенность данного варианта осуществления, в котором скользящий затвор 2610 позволяет применять сам затвор в качестве индикатора верхнего и нижнего пределов перемещения кабеля. Как показано пунктирными стрелками на фиг.25-28, затвор скользит вперед и назад за счет вращения барабанного шкива при намотке него и размотке с него проволочного троса. За счет дополнительных концевых выключателей 2510, например, показанных на фиг.25 и 26, перемещение затвора 2610, передаваемое посредством стержня 2520 или подобного элемента, может использоваться для определения пределов перемещения. Как описано далее, за счет данной конструкции на настройку концевых выключателей не влияют изменения в системе, замена проволочного троса и т.д. По существу, для замены троса необходимо демонтировать только сторону 2610b затвору, ближайшую к закрепленному концу проволочного троса, несмотря на то, что при перезагрузке необходимо игнорировать концевой выключатель максимальной размотки проволочного троса. Подразумевается, что для перемещения барабанного шкива вперед и назад может применяться более традиционный приводной механизм с шариковым винтом или может применяться механизм, входящий в зацепление или механически приводящий в действие натяжной шкив посредством одной канавки на барабанном шкиве аналогично множеству существующих исполнительных механизмов Gorbel.
Рассмотрим подробнее фиг.25 и 26, на которых показана система определения пределов перемещения с использованием микровыключателей 2510, кратко описанных выше. В показанном варианте осуществления используют стержень 2520, перемещающийся вперед и назад в результате перемещения резьбового затвора (затвора 2610а). На стержне установлены два регулируемых цилиндра 2530, которые могут перемещаться в желаемое положение и затем быть зафиксированы на месте, например, с помощью стопорной гайки или аналогичного средства). Эти цилиндры соприкасаются с микровыключателями 2510, когда затвор находится в положениях верхнего и нижнего пределов. Когда направляющая или затвор проволочного троса скользит вперед и назад и цилиндры приводят в действие датчик 2510, органам управления передается сигнал инициирования верхнего или нижнего предела перемещения устройства. После инициирования предела перемещения программное обеспечение будет разрешать подъемнику работать только в направлении, противоположном инициированному значению (т.е. если инициирован верхний предел, подъемник будет работать только в направлении вниз). Пределы могут регулироваться путем перемещения цилиндров.
Хотя предполагается, что механизм микровыключателя является предпочтительным в силу его простоты, подразумевается, что могут применяться альтернативные системы обнаружения, такие как магнитный бесконтактный датчик, способный действовать без износа деталей. Например, как показано на фиг.27-29, на неподвижной крышке 998 тросового барабана может быть стационарно установлен магнитный датчик 3410. Наряду с двумя магнитными ориентирами 3420 и 3422, которые установлены на направляющем механизме 2610 проволочного троса, датчик механически соединен с барабанным шкивом. Ориентирами 3420, 3422 датчика являются один ориентированный на север и один ориентированный на юг магнит, которые способны обеспечивать сигналы пределов перемещения, подобно тому, как это рассмотрено выше. Другие возможные датчики пределов перемещения включают оптические или другие бесконтактные датчики, а также обычные механические датчики и выключатели.
Различные описанные свойства и функции предпочтительно реализованы с использованием контроллера или подобной системы обработки, применимой для работы под управлением программного кода. В одном из вариантов осуществления предусмотрен контроллер 150 (фиг.1) с предварительно загруженными возможностями обеспечения широкого диапазона свойств и функций, при этом одно или несколько свойств и функций реализуются только в результате последующей команды или сигнала, передаваемого контроллеру. За счет этого может быть обеспечена еще большая универсальность исполнительного механизма 112 (включая контроллер 150). Предполагается, что процесс или операция предварительной загрузки всех функциональных возможностей программного обеспечения с последующей реализацией лишь тех возможностей, которые желает или приобретает пользователь, способствует предусмотренной взаимозаменяемости компонентов в соответствии с одной из особенностей настоящего изобретения. Такой процесс также позволяет реализовать расширенные функциональные возможности после развертывания исполнительного механизма на месте, например, когда это потребуется пользователю или когда изменится применение, в исполнительном механизме могут быть реализованы дополнительные свойства или функции. В случае более поздней установки готового к немедленному применению компонента исполнительный механизм не только распознает его, как это описано выше, но также может изменить свои программные органы управления, чтобы способствовать использованию вновь установленного компонента. Предполагается, что эти усовершенствования позволят быстро настраивать исполнительный механизм в соответствии с требованиями заказчика и одновременно уменьшать или исключать необходимость вносить изменения в заказное программное обеспечение и обеспечивать постоянную поддержку.
Вернемся к фиг.12А, на которой показано дальнейшее усовершенствование выносного пульта управления или рабочего органа 116 оператора. В показанном варианте осуществления выносной пульт 116 управления оснащен жидкокристаллическим дисплеем (ЖКД) 3610 или дисплеем на основе подобной технологии, обеспечивающим возможность передачи более легкодоступной информации пользователю. Информация, отображаемая на ЖКД, может включать базовую информацию, такую как состояние системы (т.е. система готова к использованию), текущую или необязательную информацию, такую как вес груза, использование системы или служебную информацию (т.е. число выполненных циклов и индикаторы обслуживания системы), а также расширенные указания и информацию обратной связи при нахождении в режиме программирования, такую как, какое свойство в данный момент программируется (т.е. действующие пределы).
За счет использования ЖКД можно предоставлять большее количество различной информации установщику, пользователю и даже сотрудникам технического обслуживания. В качестве альтернативы ЖКД для передачи оператору информации о состоянии исполнительного механизма также могут использоваться обычные светоизлучающие диоды (СИД) и т.п.
В еще одном альтернативном варианте осуществления, например, показанном на фиг.25, проволочный трос постоянно туго натянут между барабанным шкивом 111, крышкой 998 барабана и скользящими затворами 2610, за счет чего отсутствует пространство для провисания проволочного троса где-либо в исполнительном механизме. Так, даже в случае приложения сжимающей нагрузки к проволочному тросу в исполнительном механизме 112 не будет образовываться или накапливаться провисание до тех пор, пока закрепленный конец остается зафиксированным. В сущности, пока проволочный трос находится внутри исполнительного механизма и не вышел из затвора по мере его разматывания со шкива и до выхода из исполнительного механизма или корпуса барабана, вероятно, остается свободной небольшая его часть. Также подразумевается, что за счет использования проволочного троса большего диаметра (например, троса диаметром 0,25 дюйма, поскольку он обладает большей прочностью при сжатии, чем трос меньшего диаметра) уменьшается способность троса образовывать петлю (провисать), когда он не натянут на коротком расстоянии. Специалисты в данной области техники поймут, что диаметр троса зависит от грузоподъемности исполнительного механизма и может быть меньше или больше 0,025 дюйма.
За счет дополнительных функциональных возможностей, которые реализованы в используемых органах управления, система также может осуществлять один или несколько процессов идентификации аппаратного обеспечения при включенном питании, и может сравнивать получаемую информацию с заданными функциональными возможностями. Используя такую информацию, система может создавать предупреждающее сообщение для отображения, если обнаружены такие проблемы, как недействующие или отсутствующие подсистемы, например отсутствующая рукоятка или недействующее обнаружение присутствия оператора.
За счет универсальной конструкции, рассчитанной на различные описанные варианты осуществления, в настоящем изобретении предусмотрено назначение портов ввода-вывода в режиме реального времени посредством гибкой настройки параметров конфигурации, а не изменения каждый раз исходной программы. Такая система позволяет пользователю получать доступ к предварительно запрограммированным функциональным возможностям, доступным для органов управления, чтобы быстрее создавать конфигурацию входов-выходов устройства в соответствии с конкретным применением. Предусмотрено, что для дальнейшего упрощения и обеспечения удобства и гибкости выбора конфигурации может использоваться интерфейс на основе программных средств.
Подразумевается, что различные особенности описанных и иных свойств и функций или их альтернатив могут быть при желании объединены во множестве различных систем или применений. Впоследствии специалисты в данной области техники также смогут предложить различные непредусмотренные или непредвиденные альтернативы, модификации, варианты или усовершенствования изобретения, которые также считаются входящими в объем следующих притязаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| АППАРАТ И СПОСОБ ОБЛЕГЧЕНИЯ ПОДЪЕМА | 2010 |
|
RU2542818C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ | 2012 |
|
RU2574047C2 |
| ТРЕНАЖЁР И СПОСОБ ВЫПОЛНЕНИЯ УПРАЖНЕНИЙ | 2017 |
|
RU2660300C1 |
| ПОДВИЖНАЯ УСТАНОВКА ДЛЯ РЕМОНТА СКВАЖИН | 2003 |
|
RU2338050C2 |
| СИСТЕМЫ ПОДЪЕМНОГО УЗЛА И СПОСОБЫ | 2008 |
|
RU2492904C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |
| БОЛЬШОЙ ДРАГЛАЙН С ЭЛЕКТРОПРИВОДОМ | 2000 |
|
RU2290475C2 |
| ПОРТАЛЬНЫЙ КРАН С МНОЖЕСТВОМ ПОДЪЕМНИКОВ | 2007 |
|
RU2441834C2 |
| ЗАЩИТНОЕ УСТРОЙСТВО ДЛЯ КРАНА | 2010 |
|
RU2523870C2 |
Изобретение относится к исполнительному механизму подъемного устройства и к подъемной системе. Подъемная система по первому, второму, третьему и четвертому варианту включает исполнительный механизм, интерфейс "груз-машина". Исполнительный механизм включает шкив с прикрепленным к нему кабелем. Шкив приводится в действие двигателем и соответствующей трансмиссией. Интерфейс "груз-машина" включает органы управления пользователя. В подъемной системе по первому варианту трансмиссия включает зубчатый редуктор блочной конфигурации. В подъемной системе по второму варианту содержится тензодатчик, механически присоединенный к шкиву. В подъемной системе по третьему варианту содержится орган управления пользователя. Орган управления пользователя генерирует сигнал с использованием спирали для обнаружения относительного перемещения сердечника. В подъемной системе по четвертому варианту содержится скользящий затвор, механически связанный со шкивом. Исполнительный механизм включает контроллер, электродвигатель, пульт оператора, раму, датчик нагрузки, датчик провисания, универсальный узел двигателя и редуктора, планетарный редуктор, направляющую троса. Универсальный узел двигателя и редуктора оснащен дополнительным редуктором. Технический результат заключается в повышении грузоподъемности и надежности подъемной системы. 5 н. и 15 з.п. ф-лы, 35 ил.
1. Подъемная система с конфигурируемой грузоподъемностью, включающая контроллер, исполнительный механизм, управляемый упомянутым контроллером и включающий шкив с прикрепленным к нему кабелем, который намотан на него в один слой и к свободному концу которого подвешен груз, при этом шкив приводится в действие двигателем и соответствующей трансмиссией, а упомянутая трансмиссия включает зубчатый редуктор блочной конфигурации, который в комбинации с двигателем определяет грузоподъемность исполнительного механизма, и интерфейс "груз-машина", механически соединенный с концом упомянутого кабеля, включающий органы управления пользователя и генерирующий сигналы для передачи упомянутому контроллеру, который в ответ на сигналы приводит в действие исполнительный механизм для подъема и опускания груза, подвешенного к упомянутому исполнительному механизму.
2. Подъемная система по п.1, дополнительно включающая планетарный зубчатый редуктор, используемый в качестве зубчатого редуктора трансмиссии.
3. Подъемная система по п.1, дополнительно включающая датчик сжимающей нагрузки, механически связанный с упомянутым исполнительным механизмом, при этом упомянутый датчик определяет сжимающую нагрузку от элемента исполнительного механизма в зависимости от нагрузки на кабель.
4. Подъемная система по п.3, в которой элемент исполнительного механизма включает кронштейн, связанный со шкивом и связанный с двигателем и трансмиссией, при этом упомянутый кронштейн перемещается в направлении вращения в зависимости от нагрузки.
5. Подъемная система по п.1, дополнительно включающая схему связи, связанную с упомянутым контроллером, при этом упомянутая схема связи позволяет контроллеру поддерживать связь с удаленным компьютером.
6. Подъемная система по п.5, в которой связь с упомянутым удаленным компьютером включает передачу дистанционной диагностической информации.
7. Подъемная система по п.1, в которой упомянутый исполнительный механизм дополнительно включает скользящий затвор, через который из шкива выходит свободный конец упомянутого кабеля.
8. Подъемная система по п.7, в которой упомянутый скользящий затвор механически связан со шкивом для обеспечения совмещения при вращении шкива и намотке или размотке кабеля.
9. Подъемная система по п.8, в которой упомянутый затвор пересекает шкив в продольном направлении в ответ на вращение шкива, и подъемная система дополнительно включает по меньшей мере один датчик перемещения для определения положения упомянутого скользящего затвора и определения количества упомянутого кабеля, размотанного с упомянутого шкива.
10. Подъемная система по п.9, в которой упомянутый по меньшей мере один датчик перемещения генерирует сигнал по достижении подъемной системой предела перемещения.
11. Подъемная система, включающая контроллер, исполнительный механизм, управляемый упомянутым контроллером и включающий шкив с намотанным на него кабелем для поддержания груза на свободном конце упомянутого кабеля, при этом шкив приводится в действие двигателем и соответствующей трансмиссией, интерфейс "груз-машина", механически соединенный с концом упомянутого кабеля, включающий органы управления пользователя и генерирующий сигналы для передачи упомянутому контроллеру, который в ответ на сигналы приводит в действие исполнительный механизм для подъема и опускания груза, подвешенного к упомянутому исполнительному механизму, и тензодатчик, механически присоединенный к шкиву, для определения только сжимающей нагрузки в зависимости от нагрузки, прилагаемой к кабелю, при этом упомянутый тензодатчик генерирует сигнал нагрузки, передаваемый упомянутому контроллеру, который в зависимости от сигнала нагрузки приводит в действие исполнительный механизм.
12. Подъемная система, включающая контроллер, исполнительный механизм, управляемый упомянутым контроллером и включающий шкив с намотанным на него кабелем для поддержания груза на свободном конце упомянутого кабеля, при этом шкив приводится в действие двигателем и соответствующей трансмиссией, интерфейс "груз-машина", механически соединенный с концом упомянутого кабеля, включающий органы управления пользователя и генерирующий сигналы для передачи упомянутому контроллеру, который в ответ на сигналы приводит в действие исполнительный механизм для подъема и опускания груза, подвешенного к упомянутому исполнительному механизму, при этом по меньшей мере один орган управления пользователя генерирует сигнал с использованием спирали для обнаружения относительного перемещения сердечника, соединенного со скользящей рукояткой с помощью гибкого элемента, и тензодатчик для определения сжимающей нагрузки, при этом упомянутый тензодатчик генерирует сигнал нагрузки, передаваемый упомянутому контроллеру, который в зависимости от сигнала нагрузки приводит в действие исполнительный механизм.
13. Подъемная система по п.12, дополнительно включающая поворотное контактное кольцо в сборе, обеспечивающее передачу через него электрических сигналов и текучей среды под давлением.
14. Подъемная система по п.12, дополнительно включающая отражательный фотоэлектрический датчик для определения присутствия руки оператора на упомянутой рукоятке.
15. Подъемная система по п.12, дополнительно включающая жидкокристаллический дисплей на упомянутом интерфейсе "груз-машина" для отображения информации, передаваемой упомянутым контроллером.
16. Подъемная система, включающая контроллер, исполнительный механизм, управляемый упомянутым контроллером и включающий шкив с намотанным на него кабелем для поддержания груза на свободном конце упомянутого кабеля, при этом шкив приводится в действие двигателем и соответствующей трансмиссией, а упомянутый исполнительный механизм дополнительно включает скользящий затвор, механически связанный со шкивом для обеспечения совмещения при вращении шкива и намотке или размотке кабеля, и интерфейс "груз-машина", механически соединенный с концом упомянутого кабеля, включающий органы управления пользователя и генерирующий сигналы для передачи упомянутому контроллеру, который в ответ на сигналы приводит в действие исполнительный механизм для подъема и опускания груза, подвешенного к упомянутому исполнительному механизму.
17. Подъемная система по п.16, упомянутый затвор пересекает шкив в продольном направлении в ответ на вращение шкива и дополнительно включает по меньшей мере один датчик перемещения для определения положения упомянутого затвора и определения количества упомянутого кабеля, размотанного с упомянутого шкива.
18. Подъемная система по п.17, упомянутый по меньшей мере один датчик перемещения генерирует сигнал по достижении подъемной системой предела перемещения.
19. Исполнительный механизм подъемного устройства, включающий контроллер, электродвигатель для приведения в действие исполнительного механизма, работающий в зависимости от управляющих сигналов контроллера и приводящий в действие барабан, на который намотан проволочный трос, пульт оператора, установленный вблизи ненамотанного конца проволочного троса и включающий съемное подъемное приспособление, при этом пульт оператора передает сигналы оператора контроллеру для управления работой исполнительного механизма, раму, на которой с возможностью вращения подвешен весь узел привода, включающий двигатель, редуктор и барабан, датчик нагрузки, установленный на раме, для определения нагрузки в результате вращения всего узла привода при приложении нагрузки к ненамотанному концу проволочного троса, датчик провисания для определения угла ориентации или вращения всего узла привода и определения наличия состояния провисания в зависимости от сигнала датчика провисания, универсальный узел двигателя и редуктора, который может быть оснащен одним из множества дополнительных редукторов для изменения грузоподъемности исполнительного механизма, планетарный редуктор, планетарная конструкция которого преимущественно помещается внутри барабанного шкива, направляющую троса для регулирования положения кабеля после намотки на барабан или размотки с барабана, датчик предела перемещения кабеля, приводимый в действие в ответ на боковое перемещение направляющей троса при намотке или размотке кабеля, при этом направляющая троса включает множество витков резьбы, сопряженных с канавками на барабане, для обеспечения бокового усилия и перемещения направляющей при намотке или размотке кабеля.
20. Исполнительный механизм подъемного устройства по п.19, в котором пульт оператора дополнительно включает рукоятку, шарнирное соединение для связи пульта с проволочным тросом, но с возможностью его поворота на 360° относительно троса, дисковидное контактное кольцо, способное обеспечивать электрические контакты и воздушный канал или воздуховод, спиральный датчик для измерения вертикальной составляющей отклонения рукоятки, связанной с сердечником, пропущенным через спираль с помощью гибкого волокна, и жидкокристаллический дисплей на пульте для отображения информации о состоянии для оператора, бесконтактный оптический датчик приближения для обнаружения присутствия руки оператора на рукоятке во время работы.
| US 2002100899 A1, 01.08.2002 | |||
| Направляющее приспособление для каната в барабане грузовой лебедки | 1939 |
|
SU57634A1 |
| DE 3741192 A1, 15.06.1989 | |||
| JP 9169492 A, 30.06.1997. | |||

