ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к измерителю угла наклона.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Микроэлектромеханические системы ("MEMS") часто используются для измерения наклона. Однако MEMS включают в себя мелкие подвижные элементы, которые восприимчивы к удару и вибрации, которые могут оказывать неблагоприятное влияние на возможность MEMS точно измерять наклон.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩЕСТВА ИЗОБРЕТЕНИЯ
Изобретение, описанное в материалах настоящей заявки, предоставляет магнитный измеритель угла наклона, который может использоваться для определения наклона, например, рукояти ковша экскаватора, стрелы крана или другого элемента промышленной машины. Наклон элемента промышленной машины используется, например, системой исключения столкновений, системой определения полезной нагрузки, системой детектирования положения, связанной с промышленной машиной. Измеритель угла наклона включает в себя массив магнитов (например, постоянных магнитов), установленных или иным образом связанных с элементом промышленной машины. Круговой массив магнитных датчиков (например, массив датчиков на эффекте Холла или других магнитных детекторов) предусмотрен поблизости от магнитов. Массив магнитных датчиков соединяется с контроллером, который принимает сигналы от массива магнитных датчиков, связанного с детектированной характеристикой (например, магнитным потоком) от одного или более магнитов. Контроллер обрабатывает сигналы, принятые от массива датчиков. Контроллер определяет или рассчитывает наклон элемента промышленной машины на основе датчиков, в массиве датчиков, в которых детектирована характеристика (или величина характеристики) магнитов. Такой измеритель угла наклона способен определять наклон элемента промышленной машины на основании линейных перемещений элемента, вращательных перемещений элемента или сочетания линейного и вращательного перемещений элемента промышленной машины. Помимо этого, поскольку постоянные магниты и магнитные датчики не включают в себя никакие подвижные части, они не восприимчивы к ошибкам, вызванным вибрацией и ударом.
В одном варианте осуществления изобретение предусматривает способ определения наклона элемента промышленной машины. Элемент промышленной машины является независимо линейно и вращательно подвижным. Способ заключается в том, что воспринимают первый магнитный поток, связанный с первым магнитным датчиком, воспринимают второй магнитный поток, связанный со вторым магнитным датчиком, и генерируют первый сигнал потока, относящийся к первому магнитному потоку, и второй сигнал потока, относящийся ко второму магнитному потоку. Способ, также, заключается в том, что анализируют первый сигнал потока для распознания первого пикового магнитного потока, анализируют второй сигнал потока для распознания второго пикового магнитного потока и устанавливают контур магнитного датчика на основании первого пикового магнитного потока и второго пикового магнитного потока. Наклон элемента промышленной машины затем определяется на основании установленного контура магнитного датчика.
В другом варианте осуществления изобретение предоставляет промышленную машину. Промышленная машина включает в себя элемент, круговой массив магнитных датчиков и контроллер. Элемент является линейно и вращательно подвижным, относительно промышленной машины. Элемент включает в себя первый постоянный магнит и второй постоянный магнит. Круговой массив магнитных датчиков сконфигурирован с возможностью воспринимать первый магнитный поток, связанный с первым постоянным магнитом, и второй магнитный поток, связанный со вторым постоянным магнитом. Круговой массив магнитных датчиков включает в себя первый магнитный датчик, сконфигурированный с возможностью воспринимать первый магнитный поток, связанный с первым постоянным магнитом, и второй магнитный датчик, сконфигурированный с возможностью воспринимать второй магнитный поток, связанный со вторым постоянным магнитом. Контроллер сконфигурирован с возможностью принимать первый сигнал потока, относящийся к первому магнитному потоку, и второй сигнал потока, относящийся ко второму магнитному потоку, анализировать первый сигнал потока, чтобы распознать первый пиковый магнитный поток, и анализировать второй сигнал потока, чтобы распознать второй пиковый магнитный поток. Контроллер также сконфигурирован с возможностью определять наклон элемента промышленной машины на основании первого пикового магнитного потока и второго пикового магнитного потока.
В другом варианте осуществления изобретение предоставляет способ определения наклона. Способ заключается в том, что воспринимают первый магнитный поток, связанный с первым постоянным магнитом, воспринимают второй магнитный поток, связанный со вторым постоянным магнитом, генерируют первый сигнал потока, относящийся к первому магнитному потоку, и генерируют второй сигнал потока, относящийся ко второму магнитному потоку. Способ, также, заключается в том, что распознают первый пиковый магнитный поток, связанный с первым сигналом потока, распознают второй пиковый магнитный поток, связанный со вторым сигналом потока, и определяют наклон на основании первого пикового магнитного потока и второго пикового магнитного потока.
Другие аспекты изобретения станут очевидными посредством рассмотрения подробного описания и прилагаемых чертежей.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 изображает промышленную машину, согласно варианту осуществления изобретения.
Фиг. 2 изображает контроллер, согласно варианту осуществления изобретения.
Фиг. 3 - изображает систему управления для промышленной машины, согласно варианту осуществления изобретения.
Фиг. 4 - изображает систему кругового магнитного измерителя угла наклона, согласно варианту осуществления изобретения.
Фиг. 5A-5F изображают массивы датчиков, согласно вариантам осуществления изобретения.
Фиг. 6A-6D изображают массивы постоянных магнитов, согласно вариантам осуществления изобретения.
Фиг. 7 изображает процесс определения наклона элемента промышленной машины, согласно варианту осуществления изобретения.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ВОПЛОЩЕНИЯ
Прежде чем подробно разъяснены какие бы то ни было варианты осуществления изобретения, следует понимать, что изобретение не ограничено в своем применении деталями конструкции и расположением компонентов, изложенными в последующем описании или изображенными на последующих чертежах. Изобретение допускает другие варианты осуществления и осуществляется на практике или выполняется различными способами. К тому же, должно быть понятно, что фразеология и терминология, используемая в материалах настоящей заявки, предназначена для цели описания и не должна рассматриваться в качестве ограниченной. Использование «включающий в себя», «содержащий» или «имеющий» и их вариантов в материалах настоящей заявки подразумевается охватывающим элементы, перечисленные после этого, и их эквиваленты, а также дополнительные элементы. Термины «установленный», «соединенный» и «связанный» используются в широком смысле и охватывают как непосредственную, так и опосредованную установку, соединение и связывание. Дополнительно, «соединенный» и «связанный» не ограничены физическими или механическими соединениями или связями, и могут включать в себя электрические соединения или связи, непосредственные или опосредованные. К тому же, электронные сообщения и уведомления могут выполняться с использованием любых известных средств, в том числе, непосредственных соединений, беспроводных соединений, и т.д.
Должно быть отмечено, что множество устройств, основанных на аппаратных средствах и программном обеспечении, а также множество разных структурных компонентов могут использоваться для реализации изобретения. Более того, и как описано в последующих параграфах, отдельные конфигурации, изображенные на чертежах, предназначены для приведения примера вариантов осуществления изобретения и возможных других альтернативных конфигураций. Термины "процессор", "центральный процессор" и "CPU", если иного не указано, являются взаимозаменяемыми. В то время как термины "процессор", или "центральный процессор", или "CPU" используются в качестве распознающего блока, выполняющего отдельные функции, должно быть понятно, что если иного не указано, эти функции могут выполняться посредством одиночного процессора или множеством процессоров, скомпонованных в любой форме, включающих в себя параллельные процессоры, последовательные процессоры, тандемные процессоры или конфигурации облачной обработки данных/облачного вычисления.
Изобретение, описанное в материалах настоящей заявки, относится к управлению промышленной машиной (например, горной машиной, краном, погрузчиком с задней разгрузкой, платформой, погрузчиком, экскаватором с обратной лопатой и т.д.), сконфигурированной с возможностью, среди прочего, поднятия и опускания груза. Управление промышленной машиной включает в себя определение, среди прочего, размещения промышленной машины, положения элементов промышленной машины и относительных углов элементов промышленной машины по отношению друг к другу. Например, промышленная машина может включать в себя один или более измерителей угла наклона, которые могут использоваться для определения наклона, например, рукояти ковша экскаватора, стрелы или другого элемента промышленной машины. Наклон элемента промышленной машины может использоваться многообразием систем управления, связанных с промышленной машиной, с целью исключения столкновений, определения полезной нагрузки, детектирования положения и т.д.
Измерители угла наклона могут включать в себя массив из магнитов (например, постоянных магнитов), установленных или иным образом связанных с элементом промышленной машины. Круговой массив магнитных датчиков (например, массив из датчиков на эффекте Холла или других магнитных детекторов) предусмотрен поблизости от магнитов. Массив датчиков детектирует характеристику (например, магнитный поток), связанную с магнитами и подсоединен к контроллеру, который принимает сигналы из массива магнитных датчиков, относящихся к характеристике. Затем контроллер обрабатывает сигналы, принятые из датчиков массива. Контроллер определяет или рассчитывает наклон элемента промышленной машины на основе датчиков, в массиве датчиков, в которых детектирована характеристика, связанная с магнитами. Такой измеритель угла наклона способен определять наклон элемента промышленной машины на основании линейных перемещений элемента, вращательных перемещений элемента или сочетания линейного и вращательного перемещений элемента промышленной машины.
Хотя изобретение, описанное в материалах настоящей заявки, может быть применено к, выполняться посредством или использоваться в соединении с многообразием промышленных машин (например, электрическим тросовым экскаватором, скребковыми экскаваторами (драглайнами), погрузчиками с задней разгрузкой, погрузчиками с бортовым поворотом, экскаваторами с обратной лопатой, кранами и т.д.), варианты осуществления изобретения описаны в материалах настоящей заявки относительно электрического тросового или одноковшового экскаватора, такого как экскаватор 10, показанный на Фиг. 1. Экскаватор 10 включает в себя подвижное основание 15, ведущие гусеницы 20, поворотную платформу 25, платформу 30 машинного оборудования, стрелу 35, нижний край 40, ролик 45, натяжные канаты 50, подкос 55, опорную конструкцию 60, ковш экскаватора 70, подъемный канат 75, барабан 80 лебедки, рукоять ковша или рукоять 85, опорный блок 90, центр 95 вращения, блок 100 трансмиссии, палец 105 штропа, и измеритель 32 угла наклона.
Подвижное основание 15 поддерживается ведущими гусеницами 20. Подвижное основание 15 поддерживает поворотную платформу 25 и платформу 30 машинного оборудования. Поворотная платформа 25 способна вращаться на 360 градусов, относительно платформы 30 машинного оборудования, относительно подвижного основания 15. Стрела 35 шарнирно присоединена на нижнем конце 40 к платформе 30 машинного оборудования. Стрела 35 удерживается в направлении вверх и наружу относительно платформы посредством натяжных канатов 50, которые прикреплены к подкосу 55 опорной конструкции 60. Опорная конструкция 60 жестко смонтирована на платформе 30 машинного оборудования. Ролик 45 с возможностью вращения установлен на верхнем конце стрелы 35.
Ковш экскаватора 70 подвешен к стреле 35 посредством подъемного каната 75. Подъемный канат 75 оборачивается по ролику 45 и прикрепляется к ковшу экскаватора 70 в пальце 105 штропа. Подъемный канат 75 прикреплен к барабану 80 лебедки платформы 30 машинного оборудования. Так как барабан 80 лебедки вращается, подъемный канат 75 разматывается при опускании ковша 70 экскаватора или сматывается при поднятии ковша 70 экскаватора. Ковш 70 экскаватора, дополнительно, включает в себя рукоять 85 ковша, жестко присоединенную к нему. Рукоять 85 ковша поддерживается с возможностью скольжения в опорном блоке 90 и опорный блок 90 с прикреплен возможностью шарнирного поворота к стреле 35 в центре 95 вращения. Рукоять 85 ковша включает в себя конструкцию реечного прямобочного зуба, которая зацепляется ведущей шестерней, установленной в опорном блоке 90. Ведущая шестерня приводится в действие посредством электрического двигателя и блока 100 трансмиссии для того, чтобы вытягивать или втягивать рукоять 85 ковша относительно опорного блока 90.
Источник электропитания установлен в платформе 30 машинного оборудования для обеспечения энергией одного или более подъемных электрическим двигателей для приведения в действие барабана 80 лебедки, одного или более тяговых электрических двигателей для приведения в действие блока 100 трансмиссии опорного блока и одного или более поворотных электрических двигателей для поворота поворотной платформы 25. Каждый из тягового, подъемных и поворотных двигателей возбуждается посредством своего собственного контроллера двигателя или возбуждается в ответ на управляющие напряжения и токи, соответствующие командам оператора.
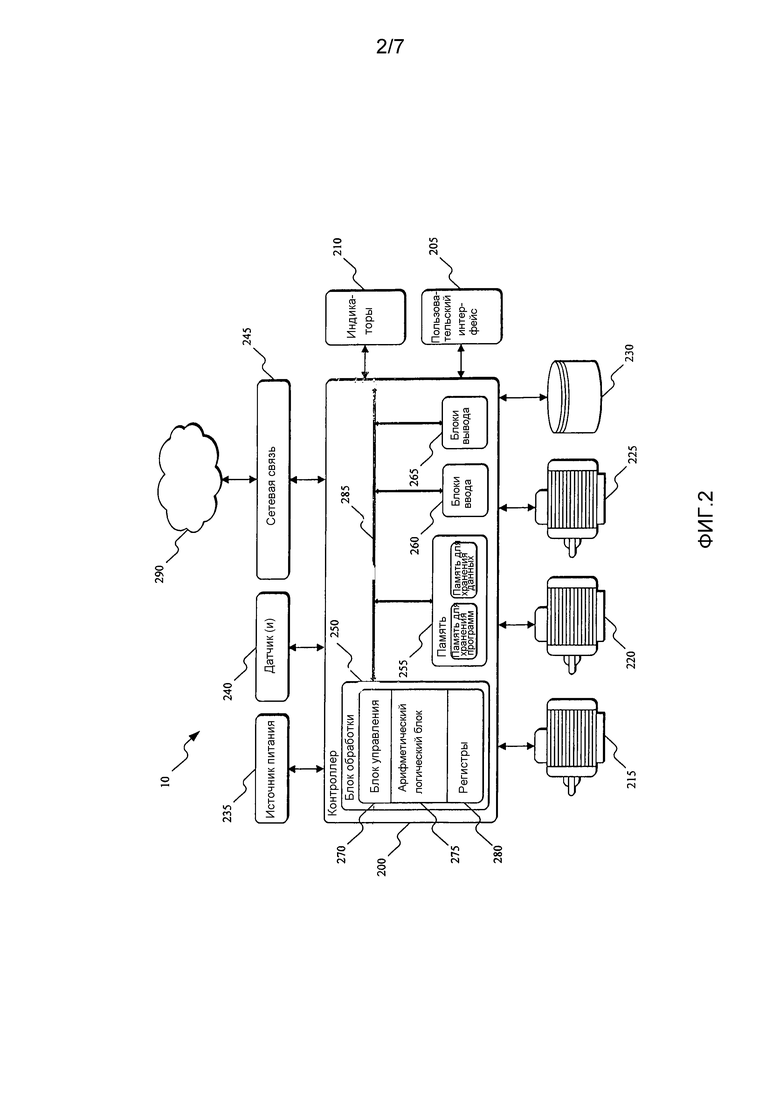
Фиг. 2 изображает контроллер 200, связанный с одноковшовым экскаватором 10 с Фиг. 1. Контроллер 200 электрически и/или с возможностью обмена данными присоединен к множеству модулей или элементов экскаватора 10. Например, изображенный контроллер 200 присоединен к одному или более индикаторов 205, модулю 210 пользовательского интерфейса, одному или более подъемных двигателей и приводов 215 подъемных двигателей, одному или более тяговых двигателей и приводов 220 тяговых двигателей, одному или более поворотных двигателей и приводов 225 поворотных двигателей, хранилищу данных или базе данных 230, модулю 235 источника питания, одному или более датчиков 240 и модулю сети обмена данными. Контроллер 200 включает в себя сочетания аппаратных средств и программного обеспечения, которые пригодны к эксплуатации для, среди прочего, управления работой одноковшового экскаватора 10, управления положением стрелы 35, рукояти 85 ковша, ковша 70 экскаватора и т.д., активации одного или более индикаторов 205 (например, жидкокристаллического дисплея ["LCD"]), контроля работы экскаватора 10, и т.д. Один или более датчиков 240 включают в себя, среди прочего, прибор измерения деформаций тягового вала, один или более измерителей угла наклона, выводов рамы, один или более модулей поля двигателя и т.д. Прибор измерения деформаций тягового вала включает в себя, например, блок приборов измерения деформаций, расположенных в направлении х (например, горизонтально) и блок приборов измерения деформаций, расположенных в направлении у (например, вертикально) так, чтобы могла определяться результирующая сила на тяговом валу. В некоторых вариантах осуществления может использоваться тяговый привод, отличный от привода тяговых двигателей (например, тяговый привод для однобалочной рукояти, штока, гидроцилиндра и т.д.).
В некоторых вариантах осуществления контроллер 200 включает в себя множество электрических и электронных элементов, которые обеспечивают энергией, оперативное управление и защиту компонентов и модулей в пределах контроллера 200 и/или экскаватора 10. Например, контроллер 200 включает в себя, среди прочего, блок 250 обработки (например, микропроцессор, микроконтроллер или другое подходящее программируемое устройство), память 225, блоки 260 ввода и блоки 265 вывода. Блок 250 обработки включает в себя, среди прочего, блок 270 управления, арифметический логический блок ("ALU") 275 и множество регистров 280 (показаны в качестве группы регистров на Фиг. 2) и реализован, используя известную компьютерную архитектуру, такую как модифицированная гарвардская архитектура, фон-неймановская архитектура и т.д. Блок 250 обработки, память 255, блоки 260 ввода и блоки 265 вывода, а также различные модули, подсоединенные к контроллеру 200, подсоединены посредством одной или более шин управления и/или данных (например, общей шины 285). Шины управления и/или данных изображены в целом на Фиг. 2 для иллюстративных целей. Использование одной или более шин управления и/или данных для взаимной связи между и обмена данными среди различных модулей и элементов, которые будут известны специалисту в данной области техники, принимая во внимание изобретение, описанное в материалах настоящей заявки. В некоторых вариантах осуществления, контроллер 200 реализован частично или полностью на полупроводниковом (например, полупроводник программируемой пользователем вентильной матрицы ["FPGA"]) чипе, таком как чип, разработанный по последовательности операций уровня регистровых передач ("RTL").
Память 255 включает в себя, например, область памяти для хранения программ и область памяти для хранения данных. Область памяти для хранения программ и область памяти для хранения данных могут включать в себя сочетания различных типов памяти, таких как постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство («ОЗУ»), (например, динамическое ОЗУ (DRAM), синхронное динамическое ОЗУ ["SDRAM"] и т.д.) электрически стираемое программируемое ПЗУ ("EEPROM'), флэш-память, жесткий диск, SD-карта, или другие подходящие магнитные, оптические, физические или электронные устройства памяти. Блок 250 обработки подсоединен к памяти 255 и выполняет команды программного обеспечения, которые способны сохраняться в ОЗУ памяти 255 (например, во время выполнения) ПЗУ памяти 255 (например, в основном на постоянной основе) или другом постоянном машиночитаемом носителе, таком как, другая память или диск. Программное обеспечение, включенное в реализацию экскаватора 10, может сохраняться в памяти 255 контроллера 200. Программное обеспечение включает в себя, например, микропрограммное обеспечение, одно или более приложений, программные данные, фильтры, правила, один или более программных модулей и другие исполняемые команды. Контроллер 200 сконфигурирован с возможностью находить в памяти и выполнять, среди прочего, команды, относящиеся к управлению последовательностью операций и способам, описанных в материалах настоящей заявки. В других конструкциях контроллер 200 включает в себя дополнительные, меньшие или различные компоненты.
Модуль 245 сетевой связи сконфигурирован с возможностью соединения и обмена данными по сети 290. В некоторых вариантах осуществления, сеть является, например, глобальной сетью ("WAN") (например, сетью на основе TCP/IP, сотовой сети, такой как, например, глобальная система мобильной связи ["GSM"], сети общей службы пакетной радиопередачи ["GPRS"], сетью множественного доступа с кодовым разделением каналов ["CDMA"], высокоскоростной системой обмена пакетными данными ["EV-DO"], сетью развития стандарта GSM с увеличенной скоростью передачи данных ["EDGE"], сетью 3GSM, сетью 4GSM, сетью усовершенствованного стандарта цифровой беспроводной связи ["DECT"], сетью цифровой усовершенствованной службы мобильных телефонов ["IS-136/TDMA"] или интегрированной цифровой расширенной сетью ["iDEN"] и т.д.).
В других вариантах осуществления, сеть 290 является, например, локальной сетью ("LAN"), сетевым окружением ("NAN"), домашней локальной сетью ("HAN"), или персональной сетью ("PAN") использующей любое многообразие протоколов обмена данными, таких как Wi-Fi, Bluetooth, ZigBee и т.д. Обмен данными по сети 290 посредством модуля 245 сетевой связи или контроллера 200 может быть защищен использованием одной или более технологий шифрования, таких как технологии, предусмотренные в стандарте IEEE 802.1 для защиты сети на основе портов, общим ключом шифрования, расширяемым протоколом аутентификации ("EAP"), безопасностью, аналогичной защите проводных сетей ("WEP"), протоколом обеспечения целостности [передаваемых данных] при помощи временных ключей ("TKIP"), службой защищенного доступа Wi-Fi ("WPA") и т.д. Связи между модулем 245 сетевой связи и сетью 290, например, являются проводными связями, беспроводными связями или сочетанием проводных и беспроводных связей. Подобным образом связи между контроллером 200 и сетью 290 или модулем 245 сетевой связи являются проводными связями, беспроводными связями или сочетанием беспроводных и проводных связей. В некоторых вариантах осуществления контроллер 200 или модуль 245 сетевой связи включают в себя один или более портов связи (например, Интернет, последовательный интерфейс обмена данными с накопителями информации ["SATA"], универсальную последовательную шину ["USB"], встроенный интерфейс накопителей ["IDE"] и т.д.) для передачи, приема или хранения данных, связанных с экскаватором 10 или работой экскаватора 10.
Модуль 235 источника питания подает номинальное напряжение переменного или постоянного тока на контроллер 200 или другие компоненты или модули экскаватора 10. Модуль 235 источника питания приводится в действие, например, источником питания, имеющим номинальные напряжения линии от 100V и до 240V переменного тока и частоты приблизительно 50-60 Гц. Модуль 235 источника питания, дополнительно, сконфигурирован с возможностью подавать низкие напряжения для работы схем и компонентов в пределах контроллера 200 или экскаватора 10. В других конструкциях контроллер 200 или другие компоненты или модули в пределах экскаватора 10 приводятся в действие посредством одной или более батарей или комплектами батарей или другим, независимым от электросети, источником питания (например, генератором, солнечной батареей и т.д.).
Модуль 210 пользовательского интерфейса используется для управления или контроля за экскаватором 10. Например, модуль 210 пользовательского интерфейса оперативно связан с контроллером 200 для управления положением ковша 70 экскаватора, положением стрелы 35, положением рукояти 85 ковша, блоком 100 трансмиссии и т.д. Модуль 210 пользовательского интерфейса включает в себя сочетание цифровых и аналоговых устройств ввода и вывода, требуемых для достижения желаемого уровня управления и контроля за экскаватором 10. Например, модуль 210 пользовательского интерфейса включает в себя дисплей (например, первичный дисплей, вторичный дисплей и т.д.) и устройства ввода, такие как сенсорные экраны дисплеев, множество кнопок, кодонабирателей, переключателей, клавиш и т.д. Дисплей является, например, жидкокристаллическим дисплеем ("LCD"), дисплеем на светоизлучающих диодах ("LED"), дисплеем на органических светоизлучающих диодах ("OLED"), электролюминесцентным дисплеем ("ELD"), дисплеем с электронной эмиссией на основе поверхностной проводимости ("SED"), дисплеем полевого излучения ("FED"), тонкопленочным транзистором ("TFT") LCD и т.д. Модуль 210 пользовательского интерфейса может, дополнительно, быть сконфигурирован с возможностью отображать режимы или данные, связанные с одноковшовым экскаватором 10 в реальном времени или по существу реальном времени. Например, модуль 210 пользовательского интерфейса сконфигурирован с возможностью отображать измеренные электрические характеристики одноковшового экскаватора 10, состояния одноковшового экскаватора 10, положения ковша 70 экскаватора, положения рукояти 85 ковша и т.д. В некоторых реализациях, модуль 210 пользовательского интерфейса управляется в сочетании с одним или более индикаторами 205 (например, СИДами, динамиками и т.д.) для предоставления визуальных или звуковых индикаций состояния или режимов одноковшового экскаватора 10.
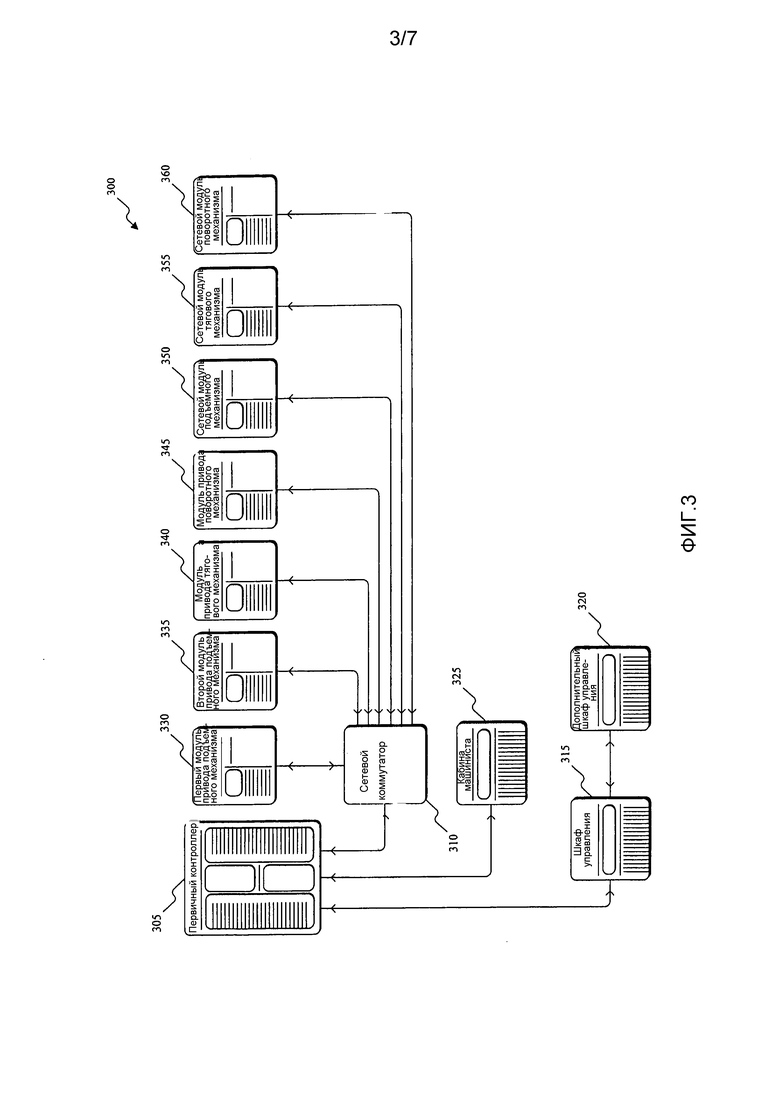
Фиг. 3 изображает систему 300 управления одноковшового экскаватора 10 более подробно. Например, одноковшовый экскаватор 10 включает в себя первичный контроллер 305, сетевой коммутатор 310, шкаф 315 управления, дополнительный шкаф 320 управления; кабину 325 оператора, первый модуль 330 привода подъемного механизма, второй модуль 335 привода подъемного механизма, модуль 340 привода тягового механизма, модуль 345 привода поворотного механизма, сетевой модуль 350 подъемного механизма, сетевой модуль 355 тягового механизма и сетевой модуль 360 поворотного механизма. Различные элементы системы 300 управления подсоединены посредством и сообщаются по, например, оптоволоконной коммуникационной системе, использующей один или более сетевых протоколов для автоматизации производства, таких как высокоскоростная шина цифрового технологического оборудования ("PROFIBUS"), Ethernet, ControlNet, Foundation Fieldbus, INTERBUS, протокол CAN ("CAN") и т.д. Система 300 управления может включать в себя компоненты и модули, описанные выше относительно Фиг. 2. Например, приводы 225 двигателей могут соответствовать приводам подъемного механизма, тягового механизма и поворотного механизма 330, 335 и 340, пользовательский интерфейс 205 и индикаторы 210 могут быть включены в кабину 325 оператора и т.д. Прибор измерения деформаций тягового вала может предоставлять электрические сигналы, указывающие на усилия, приложенные к тягового валу на первичный контроллер 305, шкаф 315 управления, дополнительный шкаф 320 и т.д.
Первый модуль 330 привода подъемного механизма, второй модуль 335 привода подъемного механизма, модуль 340 привода тягового механизма и модуль 345 привода поворотного механизма сконфигурированы с возможностью принимать сигналы управления от, например, первичного контроллера 305, для управления подъемными, тяговыми и поворотными операциями экскаватора 10. Сигналы управления связаны с сигналами возбуждения для подъемного, тягового и поворотного двигателей 225A, 225B, и 225C экскаватора 10. Поскольку сигналы возбуждения применяются к двигателям 225A, 225B, и 225C. Производительности (например, электрические и механические производительности) двигателей отслеживаются, и возвращаются на первичный контроллер 305. Производительности двигателей включают в себя, например, частоту вращения двигателя, крутящий момент двигателя, мощность двигателя, ток двигателя и т.д. На основании этих и других сигналов связанных с экскаватором (например, сигналов из одного или более измерителей угла наклона), первичный контроллер сконфигурирован с возможностью определять или вычислять одно или более рабочих состояний или положений экскаватора 10 или его элементов. В некоторых вариантах осуществления, первичный контроллер 305 определяет положение ковша экскаватора, угол обхвата подъемного каната, вращения подъемного двигателя в минуту ("rpm"), тягового двигателя rpm, скорость ковша экскаватора, ускорение ковша экскаватора, угла рукояти ковша экскаватора и т.д.
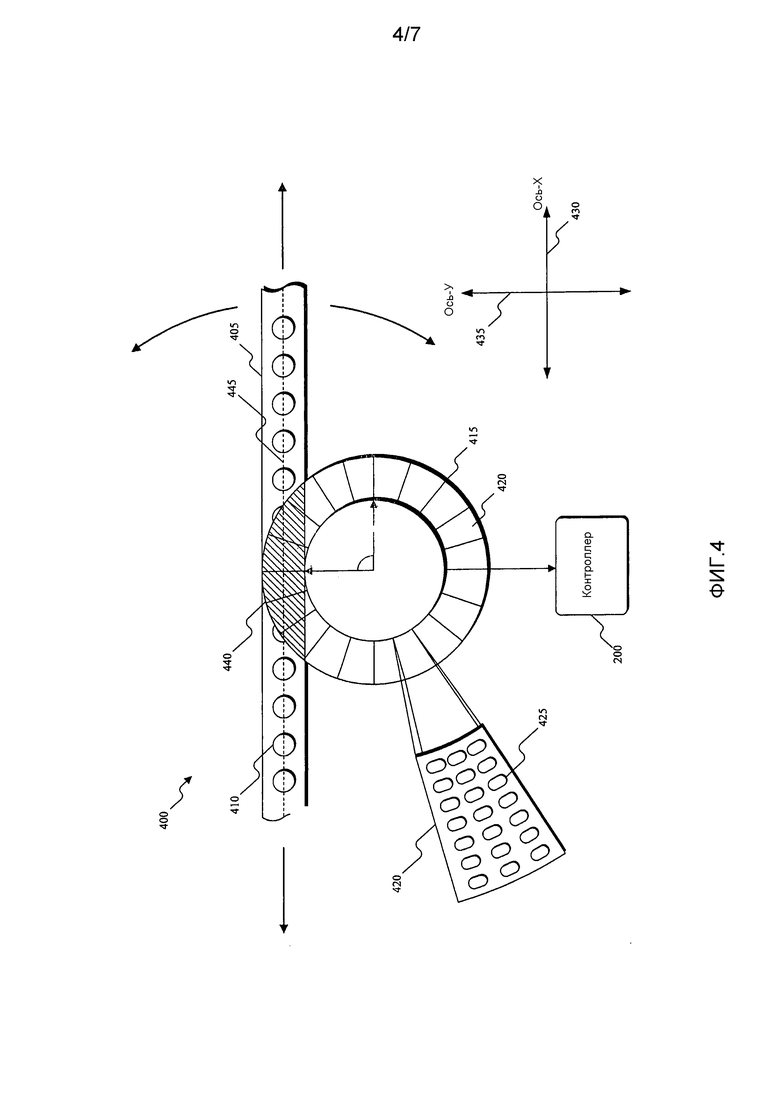
Первичный контроллер 305 или контроллер 200 подсоединен к круговой системе 400 магнитного измерителя угла наклона, как изображено на Фиг. 4. Например, в изображенном варианте осуществления, система 400 включает в себя контроллер 200, элемент 405 промышленной машины, множество магнитов (например, постоянных магнитов) 410, круговой массив 415 магнитных датчиков и множество магнитных датчиков 420. Магнитные датчики 420, например, группируются или комплектуются из магнитных детекторов 425 (например, датчиков на эффекте Холла, магнитометров или других подходящих детекторов), сконфигурированных с возможностью детектировать магнитные поля или магнитные потоки (то есть измерения магнитного поля или плотности магнитного потока проходящего через данную поверхность). В материалах настоящей заявки сделаны ссылки на «магнитный датчик 420», сделанные по отношению к вариантам осуществления изобретения, которые включают в себя множество детекторов 425 на датчик 420, хотя в других вариантах осуществления могут использоваться датчики 420, которые включают в себя отдельный детектор 425. Элемент 405 промышленной машины является, например, стрелой 35, рукоятью 85 ковша и т.д., изображенной на Фиг. 1. Варианты осуществления системы 400, описанные в материалах настоящей заявки, относительно элемента 405 промышленной машины 10 являются рукоятью 85 ковша. Элемент 405 сконфигурирован с возможностью перемещения как в линейном направлении (например, относительно оси х 430 или, в целом, в горизонтальном направлении) и вращательного движения (например, движения относительно как оси х 430 и оси у 430 (т.е. в целом, в вертикальном направлении)). В некоторых вариантах осуществления, элемент 405, дополнительно, сконфигурирован с возможностью перемещения в линейном направлении и в то же время, вращательного движения. Перемещение элемента 405 зависит от, например, избирательного приложения подъемного и тягового усилий во время работы промышленной машины 10.
В некоторых вариантах осуществления каждый из множества магнитных датчиков 420 отдельно подсоединен к контроллеру 200. В других вариантах осуществления выходной сигнал множества магнитных датчиков 420 мультиплексируется или иным образом сочетается для передачи на контроллер 200. В изображенном варианте осуществления круговой массив 415 магнитных датчиков включает в себя двадцать магнитных датчиков 420. Каждый из магнитных датчиков 420 детектирует магнитный поток, связанный с постоянными магнитами 410, когда магнитные датчики 420 находятся вблизи с постоянными магнитами 410. Это детектирование происходит в области 440 детектирования массива 415 датчиков. Магнитный поток, который детектирован посредством магнитных датчиков 420, изменяется с положением постоянных магнитов, относительно датчиков 420. Например, если один постоянный магнит 410 расположен непосредственно поверх магнитного датчика 420, датчик 420 будет детектировать максимальный или пиковый магнитный поток из постоянного магнита 410. Однако, поскольку постоянные магниты 410 смещаются из такого положения, магнитный поток, который детектируется датчиком 420, уменьшается. На основании магнитного потока, измеренного посредством каждого из магнитных датчиков 420, контроллер 200 может определять центр контура магнитного датчика (например, центральную линию множества магнитов 445) в пределах области 440 детектирования. Тогда контроллер 200 определяет наклон элемента 405 (например, относительно оси-х 430 и оси-у 435), зависящий от того, где центр контура магнитного датчика на массиве 415 датчиков. Например, наклон рассчитывается или определяется посредством контроллера 200 на основе наклона контура магнитного датчика и расположения массива 415 датчиков. Дополнительно или альтернативно положение каждого из магнитных детекторов или магнитных датчиков известно и в зависимости, на каком из детекторов или датчиков детектированы наибольшие магнитные потоки, контроллер 200 может рассчитать или определить наклон элемента 405.
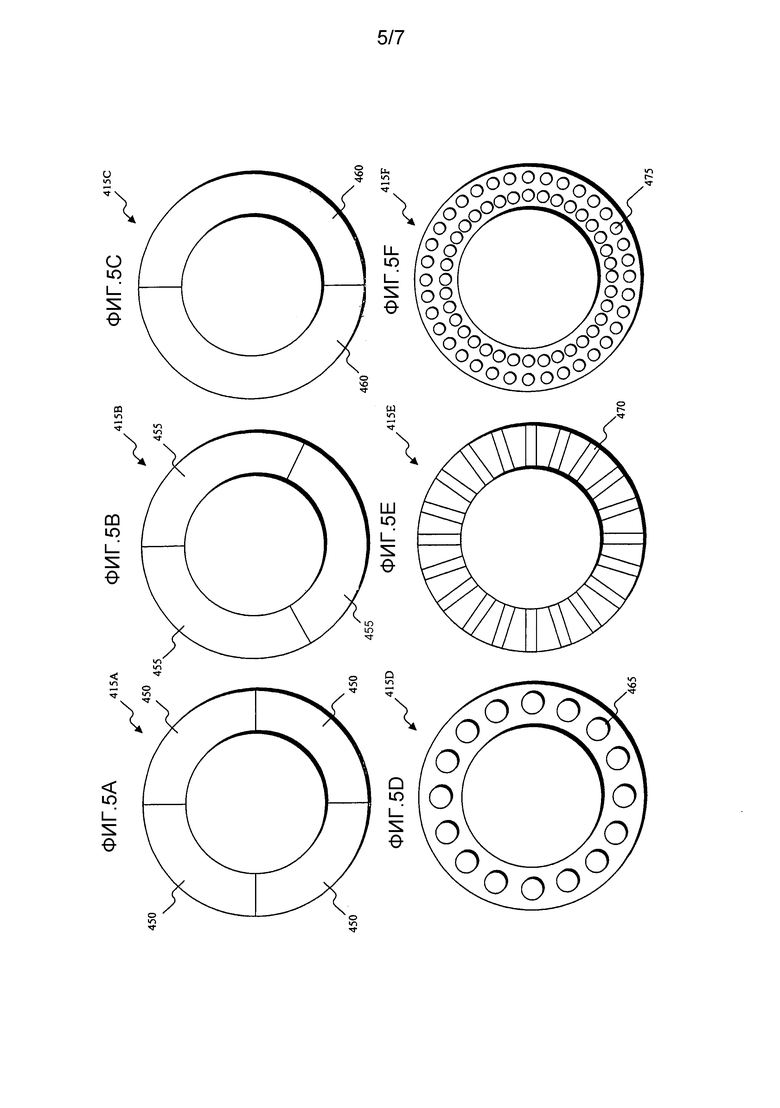
Фиг. 5A-5F изображают многообразие конфигураций различных датчиков для кругового массива 415 магнитных датчиков. На фиг. 5A, круговой массив 415A магнитных датчиков включает в себя четыре магнитных датчика 450, скомпонованных симметрично по окружности массива 415A. На фиг. 5B, круговой массив 415B магнитных датчиков включает в себя три датчика 455, и на фиг. 5C, круговой массив 415С магнитных датчиков включает в себя два датчика 460. Каждый из круговых массивов 415A, 415B и 415C магнитных датчиков включает в себя датчики, которые являются смежными друг с другом. Хотя круговые массивы 415A магнитных датчиков 415B, и 415C включают в себя только 4, 3 и 2 магнитных датчика, соответственно, круговой массив 415 магнитных датчиков может включать большее число магнитных датчиков.
Например, круговой массив 415 магнитных датчиков может включать в себя от одного датчика и до двадцати датчиков (как показано на Фиг. 4). В других вариантах осуществления, круговой массив 415 магнитных датчиков может включать в себя более чем двадцать магнитных датчиков (например, от 20 и до 1000 датчиков на основании требуемого уровня точности определения наклона). Круговой массив 415D магнитных датчиков на фиг. 5D включает в себя шестнадцать круговых магнитных датчиков 465, разнесенных вокруг массива 415D (например, разнесенных равномерно). Фиг. 5E изображает круговой массив 415E магнитных датчиков, который включает в себя двадцать датчиков 479 брусочного типа, разнесенных (например, разнесенных равномерно) вокруг массива 415E. Фиг. 5F изображает круговой массив 415E магнитных датчиков, который включает в себя 72 магнитных датчика 475, разнесенных (например, равномерно на основании ряда) в два ряда вокруг массива датчиков. Чем больше число магнитных датчиков, которые включены в массив 415, тем больше точность, с которой система 400 способна определять угол наклона элемента 405.
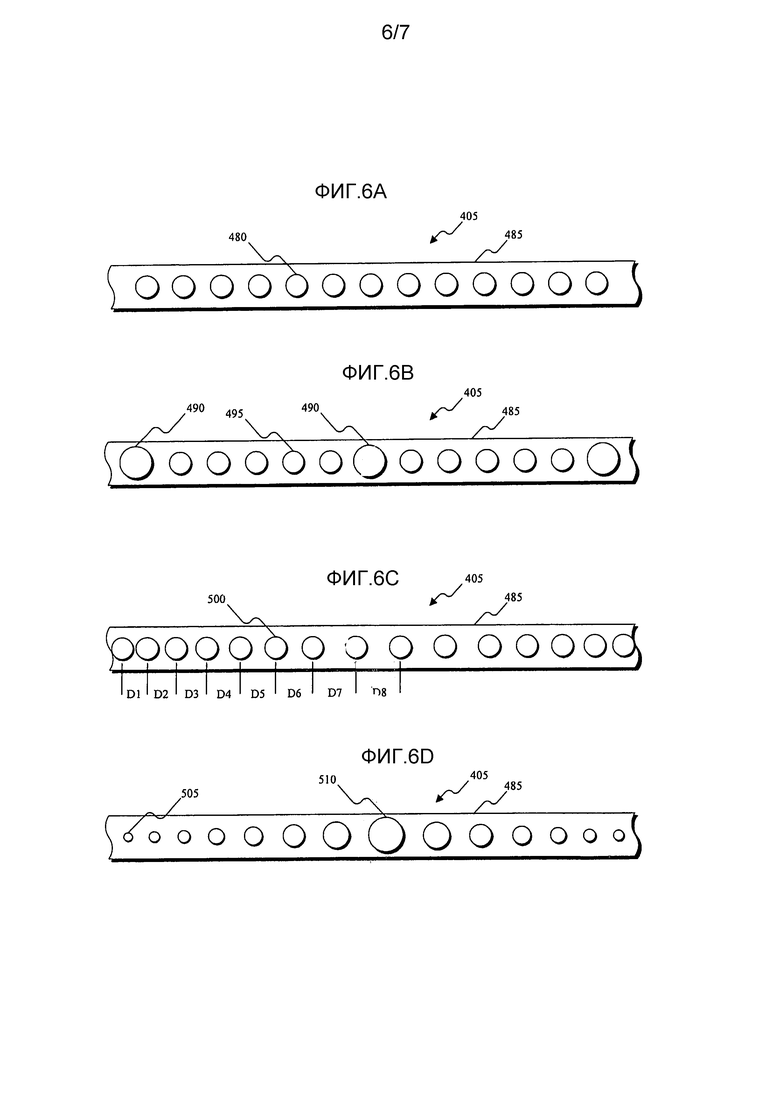
Фиг. 6A-6D изображает различные конфигурации постоянных магнитов для элемента 405. Фиг. 6A изображает множество постоянных магнитов 480, равномерно разнесенных вдоль поверхности 485 элемента 405. Хотя постоянные магниты 480, изображенные на Фиг. 6A-6D являются круглыми, могут также использоваться магниты, имеющие другие формы (например, магниты, имеющие форму квадрата, магниты, имеющие форму прямоугольника и т.д.). Дополнительно, хотя массив постоянных магнитов 480 на Фиг. 6A может использоваться для определения наклона элемента 405, магниты 480 могут также использоваться для определения, например, перемещения или вытягивания элемента 405. Для того чтобы определить вытягивание элемента 405, контроллер 200 (Фиг. 4) определяет, какой магнит детектирован массивом датчиков 415. В некоторых вариантах осуществления магниты 480 на Фиг. 6A могут подсчитываться контроллером 200, поскольку они детектированы массивом 415 датчиков. Когда элемент 405 перемещается в первом направлении, сумма магнитов может увеличиваться. Когда элемент 405 перемещается во втором направлении, сумма магнитов может уменьшаться. Дополнительно или альтернативно магниты, имеющие разные напряженности магнитных полей или магнитные моменты диполя, могут использоваться для определения частей элемента 405. Например, каждый десятый постоянный магнит 480 может иметь увеличенную или уменьшенную напряженность магнитного поля. Это позволяет контроллеру 200 определять вытягивание элемента 405 без отслеживания каждого магнита, который проходит массив датчиков. Фиг. 6B изображает вариант осуществления элемента 405, который включает в себя постоянные магниты различных размеров. Большие постоянные магниты 490 могут использоваться для того, чтобы распознать определенные части элемента 405. Когда контроллер 200 измеряет переход из магнитного потока, связанного с большими магнитами 490 (например, поток, детектированный посредством большего числа детекторов 425), к потоку из меньшего магнита 495 (например, поток, детектированный посредством небольшого числа детекторов 425) или наоборот, контроллер 200 способен определить конкретную часть элемента 405.
Фиг. 6C изображает вариант осуществления элемента 405, который включает в себя постоянные магниты 500, имеющие изменяющиеся расстояния D, между ними. Например, расстояния между относительными центрами первых девяти постоянных магнитов 500 постепенно увеличивается вдоль поверхности 485 элемента 405, от расстояния D1, вверх до расстояния D8. В некоторых вариантах осуществления, затем расстояния, соответственно, могут уменьшаться. Поскольку получающиеся интервалы между постоянными магнитами 500 будут детектированы массивом 415 датчиков как уменьшение в детектированном магнитном потоке (или отсутствие магнитного потока), контроллер 200 может сравнить уменьшение в детектированном магнитном потоке с известными относительными размерами расстояний между постоянными магнитами 500 для определения конкретной части элемента 405. Фиг. 6D изображает вариант осуществления элемента 405, который включает в себя постоянные магниты различных размеров. Например, магниты варьируются в размерах от маленьких магнитов 505 до больших магнитов 510 и размеры магнитов могут постепенно увеличиваться вдоль длины элемента 405. Поскольку магниты становятся больше, магнитный поток, связанный с магнитами, детектируется большим числом детекторов 425 в датчиках 420. Поскольку магниты могут быть равномерно разнесены, размер области, где детектируется магнитный поток для каждого магнита, можно сравнить методом сравнения с размером области, где детектируется магнитный поток для магнитов, прилегающих к нему. На основании этого сравнения контроллер 200 может распознавать конкретную часть элемента 405. Массивы постоянных магнитов, показанные и описанные касательно Фиг. 6A-6D могут, дополнительно, использоваться для определения, например, направления перемещения элемента 405, скорости перемещения элемента 405, ускорения элемента 405 и т.д., в дополнение к используемым, для определения положения или наклона.
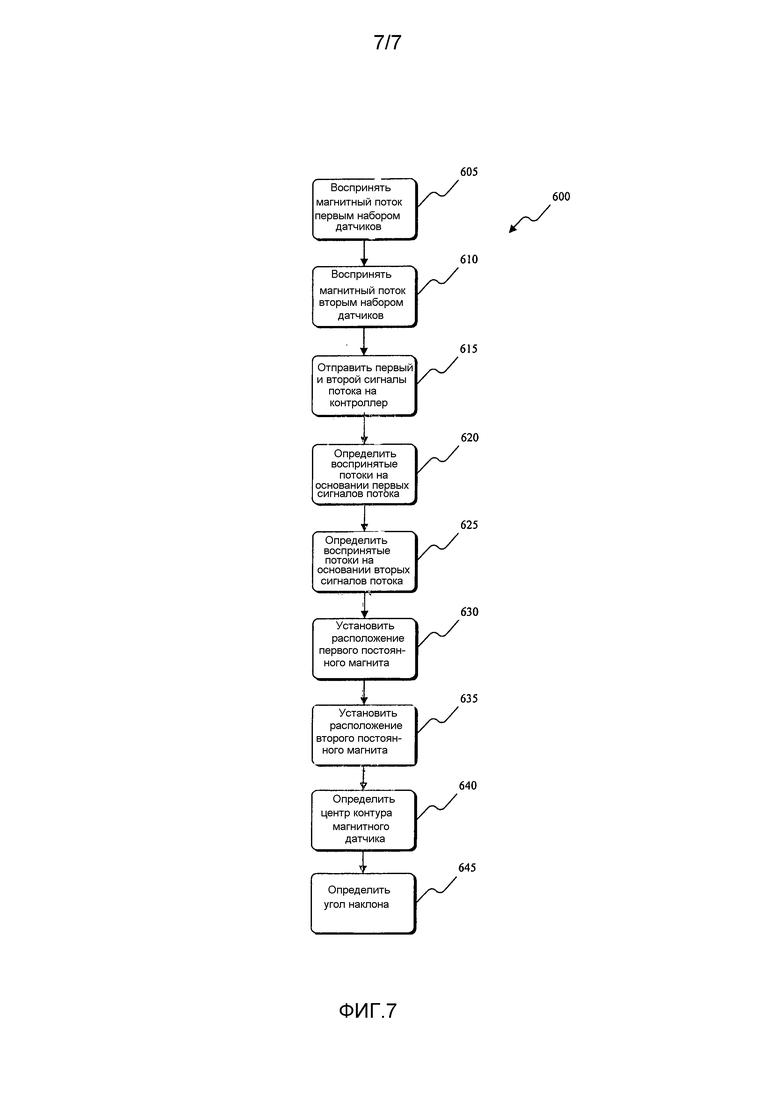
Фиг .7 изображает процесс 600 определения наклона элемента промышленной машины 10 с использованием постоянных магнитов. Первый из магнитных датчиков 420 воспринимает магнитный поток, связанный с первым постоянным магнитом и первым набором или группой детекторов (например, магнитными детекторами связанными с первым из магнитных датчиков) (этап 605). Второй из магнитных датчиков 420 воспринимает магнитный поток, связанный со вторым постоянным магнитом и вторым набором или группой детекторов (например, магнитных детекторов связанных со вторым из магнитных датчиков) (этап 610). Первый и второй из магнитных датчиков 420 генерирует первый и второй сигналы потока, соответственно, относящиеся к потокам, воспринятым каждым из датчиков. В некоторых вариантах осуществления сигналы потока соответствуют каждому из детектируемых потоков для каждого из магнитных детекторов в данном магнитном датчике 420. В других вариантах осуществления сигналы потока соответствуют среднему из потоков, детектируемых магнитными детекторами в данном магнитном датчике 420. Первый и второй сигналы потока затем отправляются на и принимаются контроллером 200 (этап 615). На основании первого сигнала потока, контроллер 200 определяет значения для потока, воспринятого первым магнитным датчиком (например, для каждого из магнитных детекторов в первом магнитном датчике) (этап 620). На основании второго сигнала потока, контроллер 200 определяет значения для потока воспринятого вторым магнитным датчиком (например, для каждого из магнитных детекторов во втором магнитном датчике) (этап 625).
Значения потока связанные с первым магнитным датчиком затем анализируются для установления расположения первого постоянного магнита (этап 630). Например, значения потока анализируются и сопоставляются или группируются на основании относительной величины. В некоторых вариантах осуществления, каждый магнитный датчик или каждый из магнитных детекторов представляют точку на схеме магнитного потока. Относительные значения смежных точек на схеме магнитного потока затем могут использоваться для определения наклона элемента 405. В других вариантах осуществления заполняется таблица значений магнитного потока, и каждое значение потока имеет соответствующее расположение в пределах массива магнитных датчиков. Зная расположения каждого значения потока, величины каждого значения потока и расположение массива магнитных датчиков, может определяться расположение или наклон элемента 405. Например, чем больше величина измеренного потока, тем ближе детектор был к постоянному магниту. Контроллер 200 может сравнивать каждое из значений потока с одним или более пороговыми значениями для установления расположения (например, области) или центра (например, точки) постоянного магнита. В некоторых вариантах осуществления контроллер 200 распознает пик или максимальное значение потока связанное с датчиком и использует расположение пикового значения потока в качестве расположения постоянного магнита. Например, круглый постоянный магнит будет иметь характеристику пиков магнитного потока, измеренную посредством детекторов непосредственно поверх или в непосредственной близости к, например, полюсу постоянного магнита. Детекторы, которые разнесены дальше от постоянного магнита, будут воспринимать магнитный поток меньше, и могут использоваться для определения границы постоянного магнита. Измеренные значения потока для второго магнитного датчика затем анализируются для установления расположения второго постоянного магнита или пикового магнитного потока, связанного со вторым постоянным магнитом (этап 635) некоторым образом, подобным описанному, относительно этапа 630. Контроллер 200 определяет центр контура магнитного датчика или центральную линию постоянных магнитов на основании расположений или пиковых потоков, связанных с первым и вторым постоянным магнитами (этап 640). Как описано выше, центр контура магнитного датчика и расположение кругового массива магнитных датчиков может затем использоваться для определения угла наклона элемента 405 (этап 645).
Таким образом, изобретение предоставляет, среди прочего, системы, способы и устройства для определения наклона элемента промышленной машины, использующей измеритель угла наклона с постоянным магнитом. Различные признаки и преимущества изобретения изложены в последующей формуле изобретения.

Изобретение относится к измерителю угла наклона. В способе определения наклона элемента промышленной машины элемент промышленной машины независимо линейно и вращательно подвижен, способ содержит этапы, на которых воспринимают первый магнитный поток, связанный с первым магнитным датчиком; воспринимают второй магнитный поток, связанный со вторым магнитным датчиком; генерируют первый сигнал потока, относящийся к первому магнитному потоку, и второй сигнал потока, относящийся ко второму магнитному потоку; анализируют первый сигнал потока для распознания первого пикового магнитного потока; анализируют второй сигнал потока для распознания второго пикового магнитного потока; устанавливают контур магнитного датчика на основании первого пикового магнитного потока и второго пикового магнитного потока; и определяют наклон элемента промышленной машины на основании распознанного контура магнитного датчика. Технический результат – повышение точности определения угла наклона элемента промышленной машины. 6 з.п. ф-лы, 7 ил.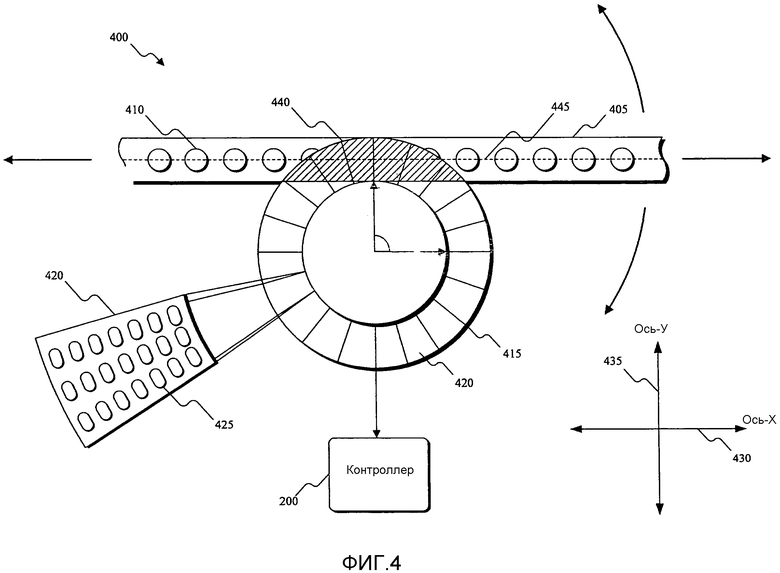
1. Способ определения наклона элемента промышленной машины, причем элемент промышленной машины независимо линейно и вращательно подвижен, содержащий этапы, на которых:
воспринимают первый магнитный поток, связанный с первым магнитным датчиком;
воспринимают второй магнитный поток, связанный со вторым магнитным датчиком;
генерируют первый сигнал потока, относящийся к первому магнитному потоку, и второй сигнал потока, относящийся ко второму магнитному потоку;
анализируют первый сигнал потока для распознания первого пикового магнитного потока;
анализируют второй сигнал потока для распознания второго пикового магнитного потока;
устанавливают контур магнитного датчика на основании первого пикового магнитного потока и второго пикового магнитного потока; и
определяют наклон элемента промышленной машины на основании распознанного контура магнитного датчика.
2. Способ по п. 1, в котором элемент промышленной машины является рукоятью ковша экскаватора.
3. Способ по п. 1, дополнительно содержащий этап, на котором в контроллере принимают первый сигнал потока и второй сигнал потока.
4. Способ по п. 1, в котором первый пиковый магнитный поток связан с первым расположением первого постоянного магнита и второй пиковый магнитный поток связан со вторым расположением второго постоянного магнита.
5. Способ по п. 1, в котором первый магнитный датчик включает в себя первое множество магнитных детекторов и второй магнитный датчик включает в себя второе множество магнитных детекторов.
6. Способ по п. 5, в котором первый сигнал потока соответствует детектированному потоку для каждого из множества магнитных детекторов в первом магнитном датчике и второй сигнал потока соответствует детектированному потоку для каждого из множества магнитных детекторов во втором магнитном датчике.
7. Способ по п. 6, в котором анализируют первый сигнал потока и второй сигнал потока, включающий в себя отображение детектированного потока для каждого из множества магнитных детекторов в первом магнитном датчике и детектированного потока для каждого из множества магнитных детекторов во втором магнитном датчике.
| US 5308219 A1, 03.05.1994 | |||
| WO 0196811 A1, 20.12.2001 | |||
| US 2007145970 A1, 28.06.2007 | |||
| ДАТЧИК УГЛА НАКЛОНА ГОРНОЙ МАШИНЫ | 1992 |
|
RU2018635C1 |

