Изобретение относится к транспортным средствам, в частности к вездеходам - гусеничным машинам с четырьмя гусеницами.
Известна конструкция гусеничной машины по патенту СА 255545, публикация 04.02.2007, которая содержит два гусеничных движителя с изменяемой геометрией положения ведущего и опорных колес относительно друг друга. Данная конструкция предназначена для использования в качестве дистанционно управляемого робота, в том числе для движения по пересеченной местности, преодоления лестниц и канав. Изменяемая геометрия гусеничного движителя необходима при преодолении столь разнообразных препятствий, особенно для преодоления лестниц. Изменение направления движения транспортного средства осуществляется путем торможения того или иного гусеничного движителя. Такая схема движительного устройства содержит по одному движителю с каждой стороны корпуса, что ухудшает маневренность и проходимость. Кроме того, она может быть применена только для небольших и сравнительно легких роботизированных транспортных средств.
Известны также гусеничные транспортные средства, в которых используется двигатель внутреннего сгорания, который приводит в действие электрический генератор. Электродвигатели с помощью энергии, полученной от генератора, приводят в движение ведущие колеса. Примером такого транспортного средства является конструкция по международной заявке WO 2011005180, публикация 13.01.2011. Данная конструкция содержит два гусеничных средства, соединенных шарнирно, при этом энергетическая установка, содержащая двигатель и электрический генератор, вырабатывающая электроэнергию, размещена на первом транспортном средстве. Каждое из гусеничных средств содержит электродвигатели, соединенные с ведущими колесами двух гусеничных движителей. Управление обеими гусеничными средствами осуществляется с первого. Поворот транспортных средств осуществляется торможением одного из двух гусеничных движителей.
В патенте СА 2140600, публикация 22.06.1996, описана конструкция транспортного средства типа пикапа, в котором вместо колес могут быть установлены гусеничные движители. Каждый из гусеничных движителей содержит раму, на которой крепится приводной барабан, опорные колеса и гусеничную ленту, охватывающую ведущее колесо и, по меньшей мере, два опорных колеса. Приводной барабан крепится к транспортному средству вместо колеса. Изменение направления движения транспортного средства осуществляется, как в автомобиле, поворотом гусеничных движителей.
Наиболее близким аналогом является решение по патенту GB 925032, публикация 01.05.1963. Четыре гусеничных движителя установлены вместо колес. Каждый из гусеничных движителей содержит раму, на которой крепится ведущее колесо и два опорных колеса. Ведущие и опорные колеса охвачены бесконечной гусеницей. Упругий элемент, соединяющий оси опорных колес, регулирует натяжение гусеницы. Изменение направления движения транспортного средства осуществляется, как в автомобиле, поворотом гусеничных движителей.
К недостаткам конструкции по патенту GB 925032 можно отнести недостаточную проходимость в трудном грунте и при наличии препятствий, которая связана, в частности, с неоптимальной геометрией движителей. Гусеничный движитель такой конструкции не может эффективно преодолевать валы, канавы и брустверы. Кроме того, для поворота движителей с гусеницами требуются гораздо большие усилия, чем для поворота колес.
Техническим результатом, который достигается в заявляемом изобретении, является повышение проходимости, управляемости и надежности вездехода при оптимальном использовании его габаритов.
Вездеход содержит корпус, установленную в нем энергетическую установку, ходовую часть и устройство управления. Энергетическая установка содержит механический двигатель, преобразователь механической энергии в электрическую и четыре электродвигателя. Ходовая часть содержит четыре гусеничных движителя, каждый из которых соединен с соответствующим электродвигателем. Движители расположены попарно в боковых выемках корпуса передней и задней частей вездехода. Каждый гусеничный движитель содержит гусеничную ленту, охватывающую ведущее колесо, соединенное с электродвигателем, и, по меньшей мере, два опорных колеса, при этом ведущее колесо расположено в верхней части корпуса, а опорные колеса расположены ниже нижней части корпуса. Ведущие колеса передней пары гусеничных движителей расположены у передней части корпуса вездехода, а ведущие колеса задней пары гусеничных движителей расположены у задней части корпуса вездехода, таким образом, что упомянутые движители передней и задней частей вездехода расположены симметрично относительно средней части корпуса. Подвеска гусеничного движителя выполнена в виде рамы, на которой выполнены крепления осей опорных колес, при этом рама посредством, по меньшей мере, двух амортизационных элементов связана с корпусом вездехода. Устройство управления выполнено с возможностью независимого управления каждым электродвигателем.
Повышение проходимости и управляемости вездехода связано, прежде всего, с конструкцией и расположением гусеничных движителей. Каждый из гусеничных движителей геометрически представляет сегмент колеса большого диаметра, что обеспечивает хорошую проходимость препятствий различного характера, например канав, ям, камней, и управляемость вездехода при их преодолении. Кроме того, проходимость вездехода обеспечивается также тем, что он содержит четыре движителя, расположенные симметрично, за счет чего он с одинаковым успехом может преодолевать препятствия вперед и назад. Повышению проходимости также способствует наличие электродвигателей, каждый из которых может управляться независимо. Каждый из электродвигателей может управляться по крутящему моменту, скорости вращения и направлению вращения независимо. Одни гусеничные движители могут вращаться в одну сторону, другие в другую. Так как движителей четыре, это позволяет маневрировать в очень сложных условиях и развернуться практически на месте. Расположение движителей симметрично друг другу делает конструкцию вездехода более удобной по компоновке и более устойчивой. При помещении тяжелых элементов вездехода, в частности механического двигателя и преобразователя механической энергии в электрическую, в нижнюю среднюю часть корпуса устойчивость и проходимость также повышаются. Повышается также надежность вездехода в силу простоты конструкции вездехода и независимого управления каждым из электродвигателей.
Симметричная конструкция расположения движителей с расположением ведущих колес у верхней части корпуса в его передней и задней частях, а опорных колес ближе к средней части корпуса, внизу, как уже было отмечено, повышает проходимость и управляемость, но, кроме того, обеспечивает оптимальное использование габаритов корпуса с опущенной вниз средней частью, которая по всей ширине корпуса может использоваться для размещения оборудования и пассажиров. Конструкция вездехода, даже если он выполнен в небольших габаритах, позволяет разместить не менее трех пассажиров с грузом и даже позволяет разместить носилки для эвакуации пострадавших.
В частном случае выполнения каждый из гусеничных движителей на виде сбоку имеет конфигурацию, близкую к треугольной.
Ведущие и опорные колеса каждого из движителей могут быть выполнены, по меньшей мере, в виде двух колес, расположенных параллельно. Это обеспечивает лучшее распределение нагрузки на гусеничную ленту и увеличивает проходимость вездехода.
Гусеничные движители могут быть расположены симметрично относительно плоскости среднего поперечного сечения вездехода, что обеспечивает лучшую вывеску конструкции и обеспечивает примерно равную проходимость при движении вперед и назад.
Рама подвески закрепляется, как правило, с возможностью поворота на оси ведущего колеса на некоторый угол, что обеспечивает лучшие условия преодоления препятствий в виде ям или возвышенностей.
Механический двигатель и преобразователь механической энергии в электрическую энергию могут быть расположены внизу корпуса, в его средней части, для лучшей устойчивости и проходимости вездехода.
Первый амортизационный элемент может быть одним концом прикреплен к корпусу вездехода, а вторым к балке рамы, соединяющей ось ведущего колеса и опорного колеса, расположенного у края корпуса, а второй амортизационный элемент одним концом также прикреплен к корпусу вездехода, а вторым к балке рамы, соединяющей опорные колеса.
Балка рамы, соединяющая крепления осей смежных опорных колес, может содержать упругий элемент для натяжения гусеничной ленты каждого движителя.
Вездеход может содержать аккумуляторное устройство электрической энергии, вырабатываемой упомянутым преобразователем механической энергии в электрическую, что обеспечивает возможность движения за счет накопленной электрической энергии при отказе механического двигателя.
Вездеход может содержать посадочное место водителя, расположенное в передней части корпуса, и два посадочных места для пассажиров, расположенных параллельно в средней части корпуса. Кроме того, он может содержать, по меньшей мере, одно место для размещения носилок, расположенное в средней части корпуса у его боковой стенки.
Во втором варианте воплощения изобретения вездеход содержит корпус, установленную в нем энергетическую установку, ходовую часть и устройство управления. При этом энергетическая установка содержит механический двигатель, преобразователь механической энергии в электрическую, ходовая часть содержит четыре гусеничных движителя, движители расположены попарно в боковых выемках корпуса передней и задней частей вездехода. Каждый гусеничный движитель содержит гусеничную ленту, охватывающую мотор-колесо, включающее электрический двигатель, и, по меньшей мере, два опорных колеса. Мотор-колесо расположено в верхней части корпуса, а опорные колеса расположены ниже нижней части корпуса, мотор-колеса передней пары гусеничных движителей расположены у передней части корпуса вездехода, а мотор-колеса задней пары гусеничных движителей расположены у задней части корпуса вездехода, таким образом, что упомянутые движители передней и задней частей вездехода расположены симметрично относительно средней части корпуса. Подвеска гусеничного движителя выполнена в виде рамы, на которой выполнены крепления осей опорных колес, при этом рама посредством, по меньшей мере, двух амортизационных элементов связана с корпусом вездехода, а устройство управления выполнено с возможностью независимого управления каждым мотор-колесом.
Отличие второго варианта от первого заключается в том, что вместо отдельных элементов, электродвигателя и ведущего колеса, использован один элемент - мотор-колесо. В этом случае упрощается конструкция вездехода. В остальном свойства вездехода в целом практически такие же, как и в первом варианте.
В частном случае выполнения каждый из гусеничных движителей на виде сбоку имеет конфигурацию, близкую к треугольной.
Гусеничные движители могут быть расположены симметрично относительно плоскости среднего поперечного сечения вездехода.
Рама подвески закреплена с возможностью поворота на оси мотор-колеса на некоторый угол.
Механический двигатель и преобразователь механической энергии в электрическую энергию могут быть расположены внизу корпуса, в его средней части.
Первый амортизационный элемент может быть одним концом прикреплен к корпусу вездехода, а вторым к балке рамы, соединяющей ось мотор-колеса и опорного колеса, расположенного у края корпуса, а второй амортизационный элемент одним концом также прикреплен к корпусу вездехода, а вторым к балке рамы, соединяющей опорные колеса.
Балка рамы, соединяющая крепления осей смежных опорных колес, может содержать упругий элемент.
Вездеход может содержать аккумуляторное устройство электрической энергии, вырабатываемой упомянутым преобразователем механической энергии в электрическую энергию.
Вездеход может содержать посадочное место водителя, расположенное в передней части корпуса, и два посадочных места для пассажиров, расположенных параллельно в средней части корпуса. Кроме того, он может содержать, по меньшей мере, одно место для размещения носилок, расположенное в средней части корпуса у его боковой стенки.
Изобретение поясняется рисунками.
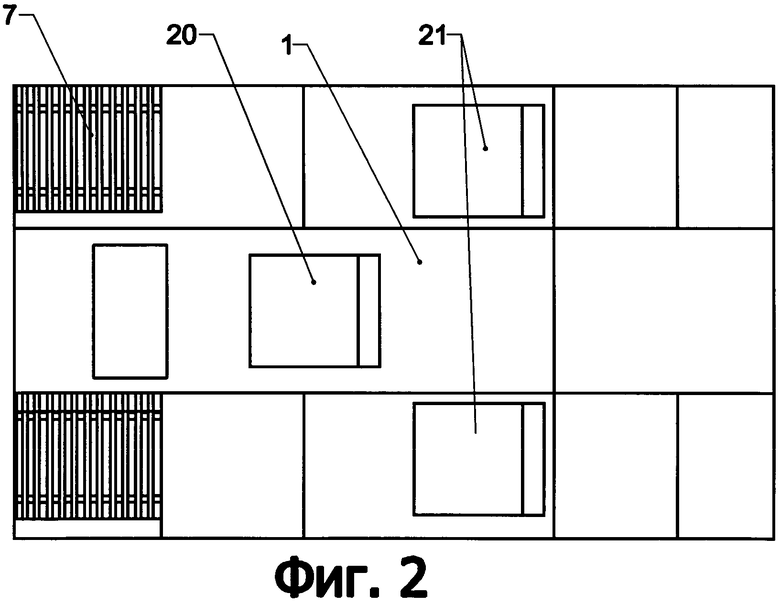
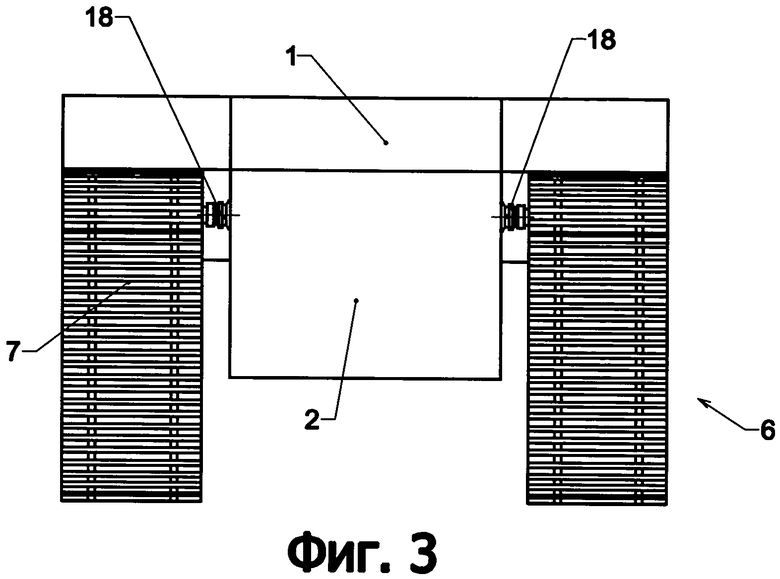
На Фиг.1 показан вездеход на виде сбоку, на Фиг.2 - на виде сверху, а на Фиг.3 - на виде спереди.
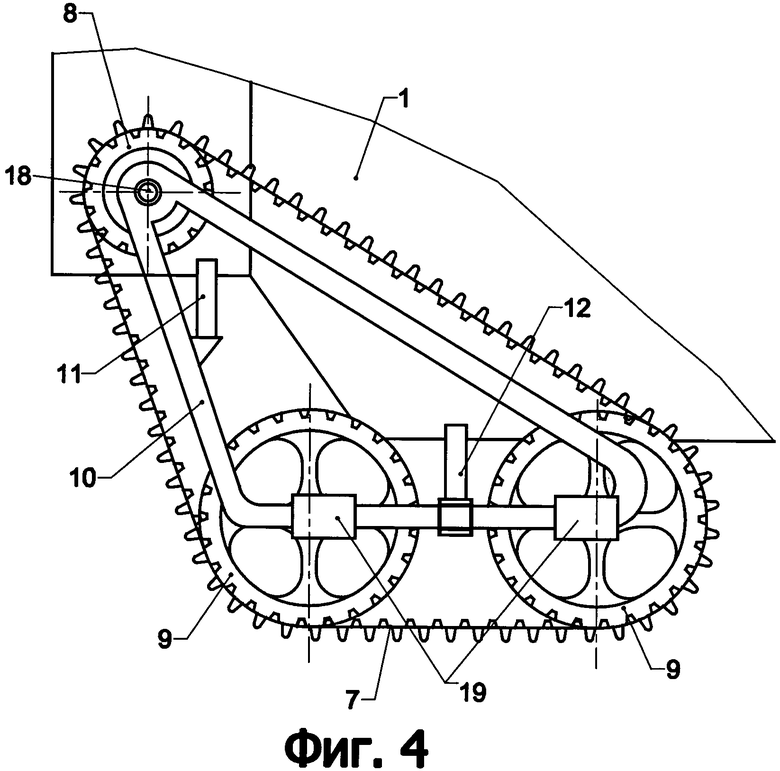
На Фиг.4 приведен движитель, установленный в выемке корпуса.
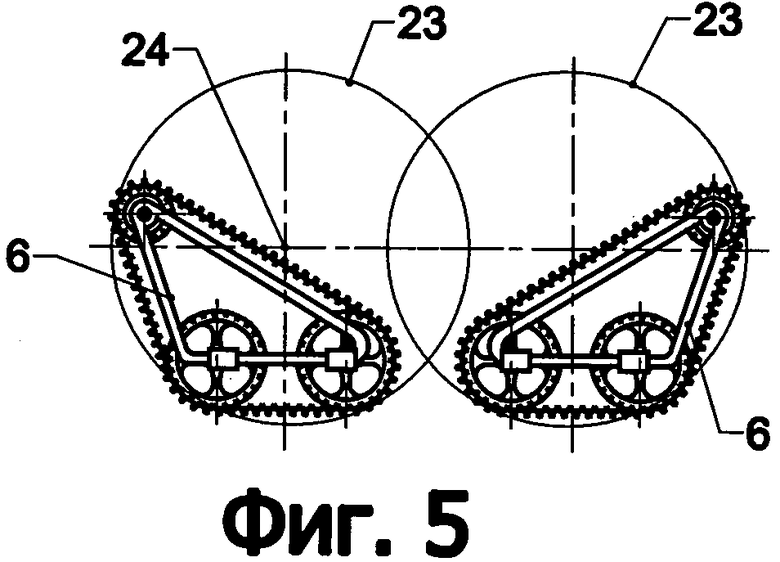
На Фиг.5 приведена схема ходовой части вездехода.
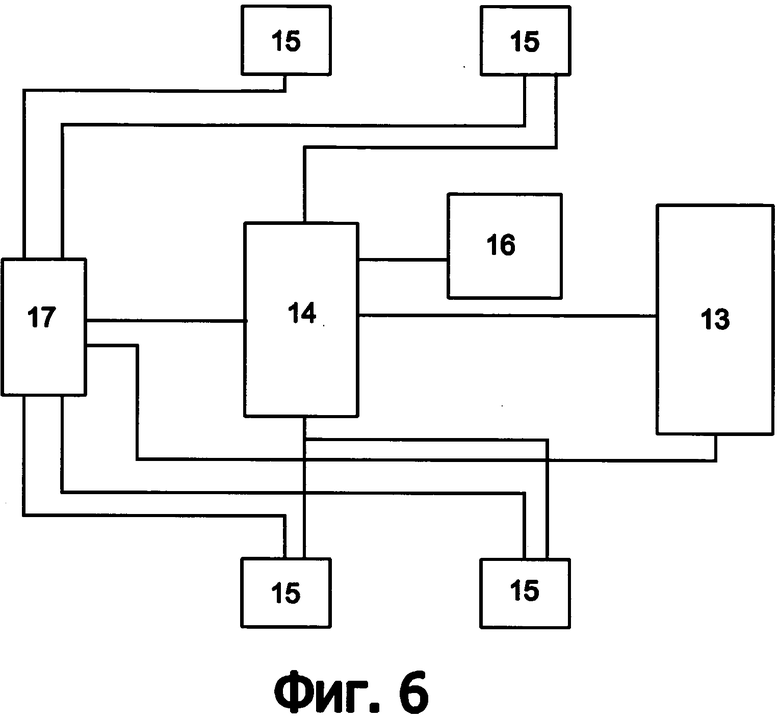
На Фиг.6 приведена схема энергетической установки вездехода.
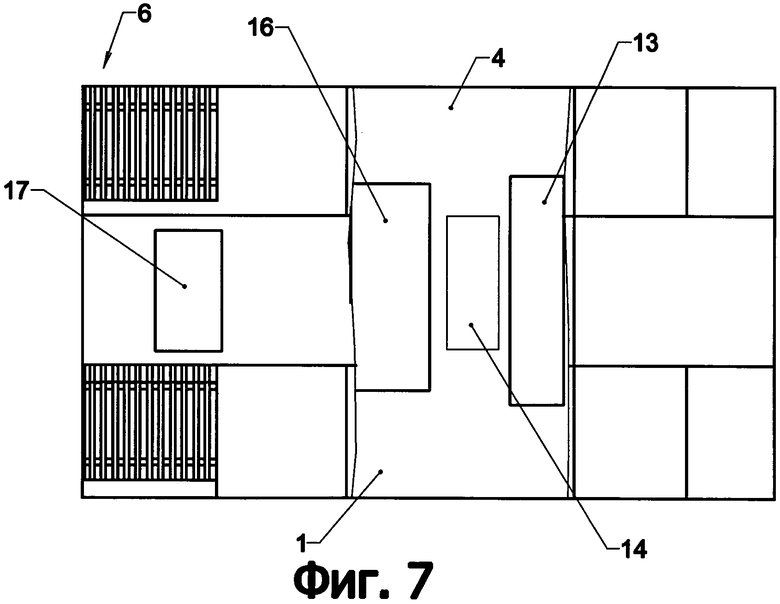
На Фиг. 7 показано расположение энергетической установки и устройства управления вездеходом.
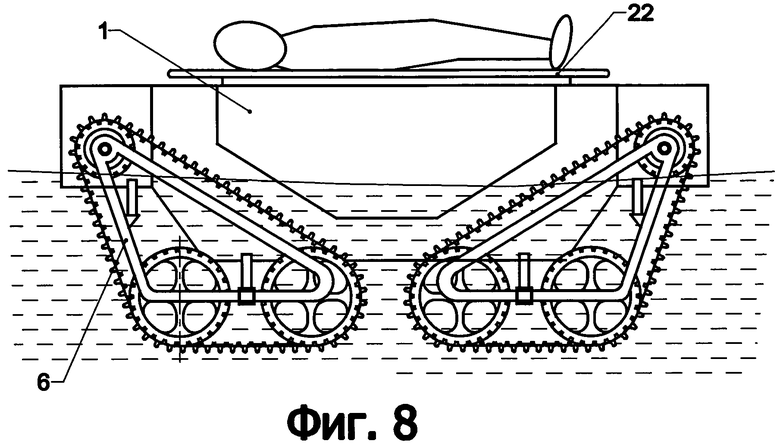
На Фиг.8 приведен вид вездехода на виде сбоку при передвижении в воде.
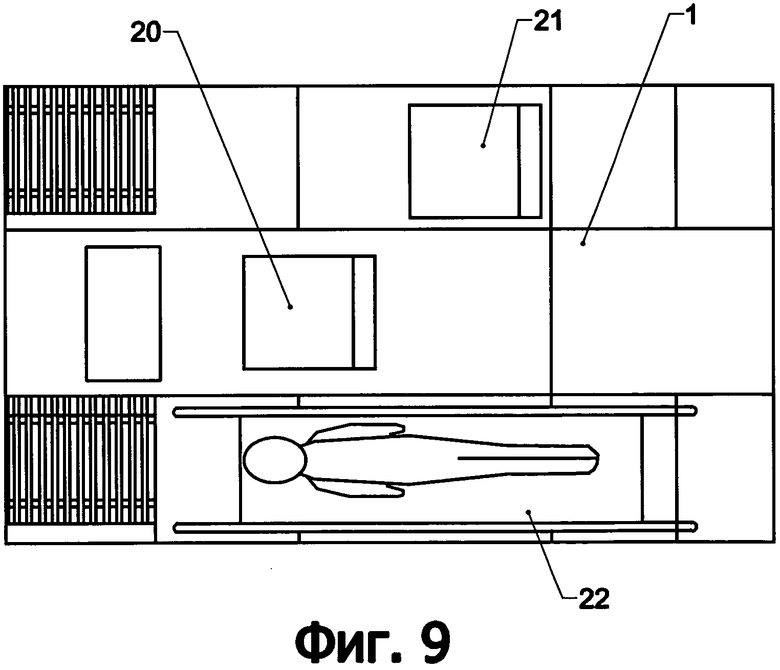
На Фиг.9 приведен вид вездехода сверху со спасательным оборудованием.
Вездеход (Фиг.1 - Фиг.4) содержит корпус 1, установленную в нем энергетическую установку, ходовую часть и устройство управления. Ходовая часть содержит четыре гусеничных движителя 6, каждый соединен с соответствующим электродвигателем 15. Движители 6 расположены попарно в боковых выемках 5 корпуса 1 передней части 2 и задней части 3 корпуса вездехода. Каждый гусеничный движитель 6 содержит гусеничную ленту 7, охватывающую ведущее колесо 8 и два опорных колеса 9. Ведущее колесо 8 расположено в верхней части корпуса 1, а опорные колеса 9 расположены ниже нижней части корпуса 1, при этом движители 6 передней и задней частей вездехода расположены симметрично относительно средней части 4 корпуса 1. Ведущие 8 и опорные колеса 9 могут быть выполнены в виде, по меньшей мере, двух дисков, имеющих сцепление с гусеницей 7 (на фигурах не показано). Каждый из движителей 6 (Фиг.5) имеет конфигурацию, близкую к треугольной, и, по сути, представляет собой сегмент гипотетического колеса 23 большого диаметра с центром 24. Именно этим обстоятельством, в частности, определяется высокая проходимость вездехода. Подвеска гусеничного движителя 6 выполнена в виде рамы 10, на которой выполнены крепления осей 22 опорных колес 9, при этом рама 10 посредством, например, двух амортизационных элементов 11 связана с корпусом 1 вездехода. Рама 10 подвески каждого движителя 6 установлена с возможностью поворота на оси 18 ведущего колеса 8. Первый амортизационный элемент 11 одним концом прикреплен к корпусу 1 вездехода, а вторым к балке рамы 10, соединяющей ось 18 ведущего колеса 8 и опорного колеса 9, расположенного у края корпуса 1. Второй амортизационный элемент 11 одним концом также прикреплен к корпусу 1 вездехода, а вторым к балке рамы 10, соединяющей опорные колеса 9. Балка рамы 10, соединяющая крепления осей 22 смежных опорных колес 8, содержит упругий элемент 19, служащий для натяжения гусеничной ленты 7.
Энергетическая установка (Фиг.6) включает механический двигатель 13, в частности двигатель внутреннего сгорания, преобразователь 14 механической энергии в электрическую и четыре электродвигателя 15. Преобразователем 14 может служить электрический генератор. К преобразователю 14 подключено аккумуляторное устройство 16 для накапливания электрической энергии. Таким образом, вездеход может двигаться при работе механического двигателя 13 или с помощью электрической энергии, запасенной в аккумулирующем устройстве 16. Механический двигатель 13, преобразователь 14 механической энергии в электрическую энергию и аккумулирующее устройство 16 расположены в средней части 4 корпуса 1, внизу, для лучшей устойчивости и проходимости вездехода (Фиг.7). Конструкция движителей 6 обеспечивает также герметичность корпуса 1 вездехода. Оси 18 ведущих колес 8 расположены в верхней части корпуса 1. Центр тяжести вездехода ввиду расположения механического двигателя 13, преобразователя 14 механической энергии в электрическую и аккумуляторного устройства 16 внизу корпуса, в средней части, находится низко и в плоскости среднего поперечного сечения. Таким образом, вездеход, как это показано на Фиг.8, может быть плавающим. Для плавающего вездехода может быть установлен дополнительный движитель, например гребной винт или водомет.
Устройство управления 17 выполнено с возможностью независимого управления каждым электродвигателем 15.
В движителе вездехода вместо электродвигателя и ведущего колеса может быть использован объединенный элемент - мотор-колесо. Мотор-колеса известны из уровня техники. Однако пока в вездеходах они не применяются. Применение мотор-колеса позволяет упростить конструкцию и сделать ее более пригодной для ремонта в полевых условиях. На чертежах мотор-колесо не показано.
Вездеход может выпускаться с посадочным местом 20 водителя и с двумя посадочными местами 21 пассажиров. Кроме того, вездеход может оснащаться носилками 22 для перевозки больных, которые могут быть расположены в средней части 4 корпуса 1, у боковой стенки.
Вездеход является универсальным транспортным средством, предназначенным для движения как по хорошей дороге, так и по бездорожью. Во время движения по бездорожью он обладает высокой проходимостью благодаря геометрии гусеничных движителей 6, симметричной установке движителей 6, что позволяет вездеходу двигаться вперед и назад одинаково эффективно. Каждое из ведущих колес 8 соединено с собственным электродвигателем 15, что позволяет регулировать мощность, скорость вращения и направление вращения независимо каждого электродвигателя 15. Такая конструкция энергетической и ходовой установки позволяет управлять направлением движения вездехода без поворота гусеничных движителей, как это традиционно принято в гусеничных машинах с одной парой гусеничных движителей. С другой стороны, наличие двух пар движителей 6 с независимым управлением каждым электродвигателем и наличие датчиков устройства управления 17 позволяет реализовать в вездеходе привычные для колесных автомобилей активные системы безопасности типа антиблокировочной системы и т.д. Все системы управления вездеходом и энергетическая установка могут быть резервированы, пространство внутри корпуса это позволяет. В этом случае надежность вездехода заметно возрастает.
Заявляемая конструкция является вездеходом, который можно считать и болотоходом, снегоходом и амфибией. Вездеход может быть использован в том числе для спасательных операций, что для малых по размерам вездеходов весьма существенно. Для этого на вездеходе вместо одного или двух пассажирских сидений могут быть закреплены носилки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОДВЕСКИ И ПОДВЕСКА ДВИЖИТЕЛЯ ВЕЗДЕХОДА | 2015 |
|
RU2615828C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2013 |
|
RU2534472C1 |
| ТОПЛИВНАЯ СИСТЕМА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2012 |
|
RU2523729C1 |
| ПОДВОДНАЯ СТАНЦИЯ | 2009 |
|
RU2388021C1 |
| РАЗМЫКАТЕЛЬ | 2009 |
|
RU2388645C1 |
| УСТРОЙСТВО ВЫБРАСЫВАНИЯ ГРУЗА ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2526603C1 |
| УСТРОЙСТВО СИСТЕМЫ ДАТЧИКОВ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА (ВАРИАНТЫ) | 2005 |
|
RU2293312C1 |
| СПОСОБ ВВОДА ВНУТРИТРУБНОГО СНАРЯДА В ТРУБУ ТРУБОПРОВОДА И УСТРОЙСТВО ВВОДА | 2006 |
|
RU2331015C1 |
| СПОСОБ СИНХРОНИЗАЦИИ МИКРОКОМПЬЮТЕРОВ, НАПРИМЕР БОРТОВЫХ КОМПЬЮТЕРОВ, ПАРАЛЛЕЛЬНО РАБОТАЮЩИХ В СЕТИ | 2008 |
|
RU2390953C1 |
| УСТРОЙСТВО СИСТЕМЫ ДАТЧИКОВ ВНУТРИТРУБНОГО ДЕФЕКТОСКОПА | 2007 |
|
RU2336521C1 |
Группа изобретений относится к транспортным средствам, в частности к вездеходам - гусеничным машинам с четырьмя гусеницами. Вездеход содержит корпус, установленную в нем энергетическую установку, ходовую часть и устройство управления. Энергетическая установка содержит механический двигатель, преобразователь механической энергии в электрическую энергию и четыре электродвигателя. Ходовая часть содержит четыре гусеничных движителя, каждый из которых соединен с соответствующим электродвигателем. Движители расположены попарно в боковых выемках корпуса передней и задней частей вездехода. Каждый гусеничный движитель содержит гусеничную ленту, охватывающую ведущее колесо и, по меньшей мере, два опорных колеса, при этом ведущее колесо расположено в верхней части корпуса, а опорные колеса расположены ниже нижней части корпуса. Ведущие колеса передней пары гусеничных движителей расположены у передней части корпуса вездехода, а ведущие колеса задней пары гусеничных движителей расположены у задней части корпуса вездехода, таким образом, что упомянутые движители передней и задней частей вездехода расположены симметрично относительно средней части корпуса. Подвеска гусеничного движителя выполнена в виде рамы, на которой выполнены крепления осей опорных колес, при этом рама посредством, по меньшей мере, двух амортизационных элементов связана с корпусом вездехода. Устройство управления выполнено с возможностью независимого управления каждым электродвигателем. Во втором варианте вместо каждого электродвигателя и ведущего колеса использован объединенный элемент - мотор-колесо. Достигается повышение проходимости, управляемости и надежности вездехода. 2 н. и 19 з.п. ф-лы, 9 ил.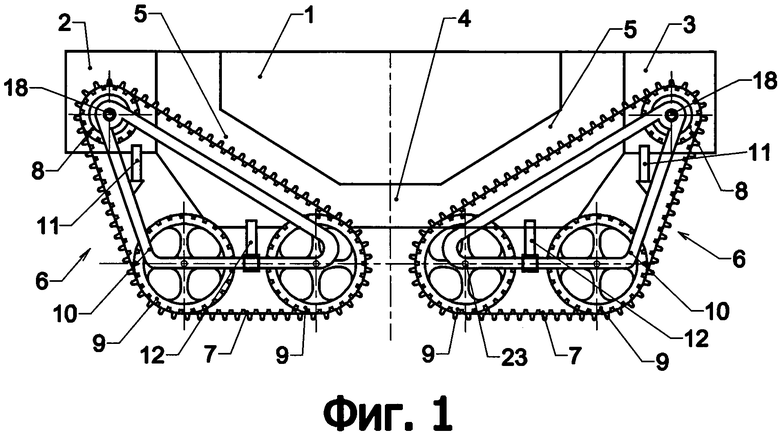
1. Вездеход, содержащий корпус, установленную в нем энергетическую установку, ходовую часть и устройство управления, характеризующийся тем, что энергетическая установка содержит механический двигатель, преобразователь механической энергии в электрическую и четыре электродвигателя, ходовая часть содержит четыре гусеничных движителя, каждый из которых соединен с соответствующим электродвигателем, движители расположены попарно в боковых выемках корпуса передней и задней частей вездехода, каждый гусеничный движитель содержит гусеничную ленту, охватывающую ведущее колесо, соединенное с электродвигателем, и, по меньшей мере, два опорных колеса, при этом ведущее колесо расположено в верхней части корпуса, а опорные колеса расположены ниже нижней части корпуса, ведущие колеса передней пары гусеничных движителей расположены у передней части корпуса вездехода, а ведущие колеса задней пары гусеничных движителей расположены у задней части корпуса вездехода, таким образом, что упомянутые движители передней и задней частей вездехода расположены симметрично относительно средней части корпуса, подвеска гусеничного движителя выполнена в виде рамы, на которой выполнены крепления осей опорных колес, при этом рама посредством, по меньшей мере, двух амортизационных элементов связана с корпусом вездехода, а устройство управления выполнено с возможностью независимого управления каждым электродвигателем.
2. Вездеход по п.1, характеризующийся тем, что каждый из гусеничных движителей на виде сбоку имеет конфигурацию, близкую к треугольной.
3. Вездеход по п.1, характеризующийся тем, что ведущие и опорные колеса каждого из движителей выполнены, по меньшей мере, в виде двух колес, расположенных параллельно.
4. Вездеход по п.1, характеризующийся тем, что гусеничные движители расположены симметрично относительно плоскости среднего поперечного сечения вездехода.
5. Вездеход по п.1, характеризующийся тем, что упомянутая рама подвески закреплена с возможностью поворота на оси ведущего колеса.
6. Вездеход по п.1, характеризующийся тем, что механический двигатель и преобразователь механической энергии в электрическую энергию расположены внизу корпуса, в его средней части.
7. Вездеход по п.1, характеризующийся тем, что упомянутые первый амортизационный элемент одним концом прикреплен к корпусу вездехода, а вторым к балке рамы, соединяющей ось ведущего колеса и опорного колеса, расположенного у края корпуса, а второй амортизационный элемент одним концом также прикреплен к корпусу вездехода, а вторым к балке рамы, соединяющей опорные колеса.
8. Вездеход по п.1, характеризующийся тем, что балка рамы, соединяющая крепления осей смежных опорных колес, содержит упругий элемент.
9. Вездеход по п.1, характеризующийся тем, что содержит аккумуляторное устройство электрической энергии, вырабатываемой упомянутым преобразователем механической энергии в электрическую энергию.
10. Вездеход по п.1, характеризующийся тем, что содержит посадочное место водителя, расположенное в передней части корпуса, и два посадочных места для пассажиров, расположенных параллельно в средней части корпуса.
11. Вездеход по п.1, характеризующийся тем, что содержит, по меньшей мере, одно место для размещения носилок, расположенное в средней части корпуса у его боковой стенки.
12. Вездеход, содержащий корпус, установленную в нем энергетическую установку, ходовую часть и устройство управления, характеризующийся тем, что энергетическая установка содержит механический двигатель, преобразователь механической энергии в электрическую, ходовая часть содержит четыре гусеничных движителя, движители расположены попарно в боковых выемках корпуса передней и задней частей вездехода, каждый гусеничный движитель содержит гусеничную ленту, охватывающую мотор-колесо, включающее электрический двигатель, и, по меньшей мере, два опорных колеса, при этом мотор-колесо расположено в верхней части корпуса, а опорные колеса расположены ниже нижней части корпуса, мотор-колеса передней пары гусеничных движителей расположены у передней части корпуса вездехода, а мотор-колеса задней пары гусеничных движителей расположены у задней части корпуса вездехода, таким образом, что упомянутые движители передней и задней частей вездехода расположены симметрично относительно средней части корпуса, подвеска гусеничного движителя выполнена в виде рамы, на которой выполнены крепления осей опорных колес, при этом рама посредством, по меньшей мере, двух амортизационных элементов связана с корпусом вездехода, а устройство управления выполнено с возможностью независимого управления каждым мотор-колесом.
13. Вездеход по п.12, характеризующийся тем, что каждый из гусеничных движителей на виде сбоку имеет конфигурацию, близкую к треугольной.
14. Вездеход по п.12, характеризующийся тем, что гусеничные движители расположены симметрично относительно плоскости среднего поперечного сечения вездехода.
15. Вездеход по п.12, характеризующийся тем, что упомянутая рама подвески закреплена с возможностью поворота на оси мотор-колеса.
16. Вездеход по п.12, характеризующийся тем, что механический двигатель и преобразователь механической энергии в электрическую энергию расположены внизу корпуса, в его средней части.
17. Вездеход по п.12, характеризующийся тем, что упомянутые первый амортизационный элемент одним концом прикреплен к корпусу вездехода, а вторым к балке рамы, соединяющей ось мотор-колеса и опорного колеса, расположенного у края корпуса, а второй амортизационный элемент одним концом также прикреплен к корпусу вездехода, а вторым к балке рамы, соединяющей опорные колеса.
18. Вездеход по п.12, характеризующийся тем, что балка рамы, соединяющая крепления осей смежных опорных колес, содержит упругий элемент.
19. Вездеход по п.12, характеризующийся тем, что содержит аккумуляторное устройство электрической энергии, вырабатываемой упомянутым преобразователем механической энергии в электрическую энергию.
20. Вездеход по п.12, характеризующийся тем, что содержит посадочное место водителя, расположенное в передней части корпуса, и два посадочных места для пассажиров, расположенных параллельно в средней части корпуса.
21. Вездеход по п.12, характеризующийся тем, что содержит, по меньшей мере, одно место для размещения носилок, расположенное в средней части корпуса у его боковой стенки.
| ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2006 |
|
RU2305045C1 |
| RU 22306683 C2, 20.06.2004 | |||
| US 5337846 A, 16.08.1994 | |||
| ВЫСОКОТЕМПЕРАТУРНОЕ ВАКУУМНОЕ РЕЛЕ ВЫСОКОГО ДАВЛЕНИЯ | 2015 |
|
RU2660130C2 |
| УСТРОЙСТВО ДЛЯ РЕМОНТА ТРУБОПРОВОДОВ С ПОМОЩЬЮ МУФТЫ | 1998 |
|
RU2140600C1 |
| CN 103158797 A, 19.06.2013 | |||
| CN 203161289 U, 28.08.2013 | |||

