Предлагаемое устройство относится преимущественно к машиностроению, в частности к ходовой части мобильного робота.
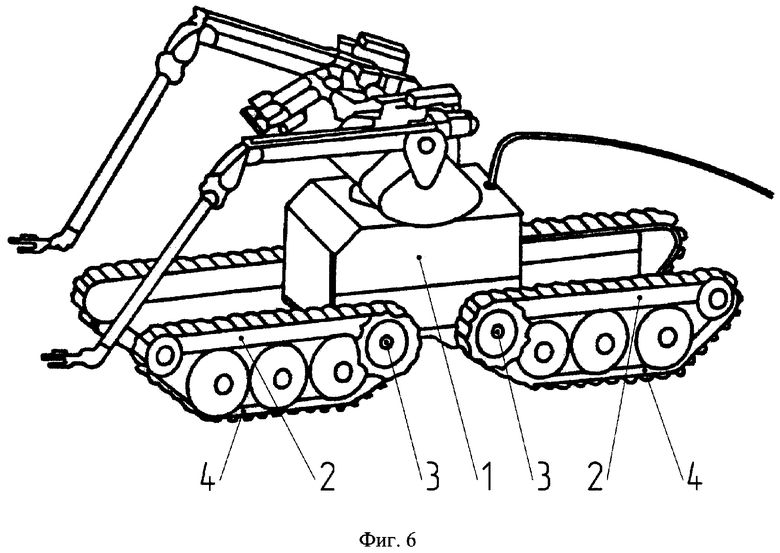
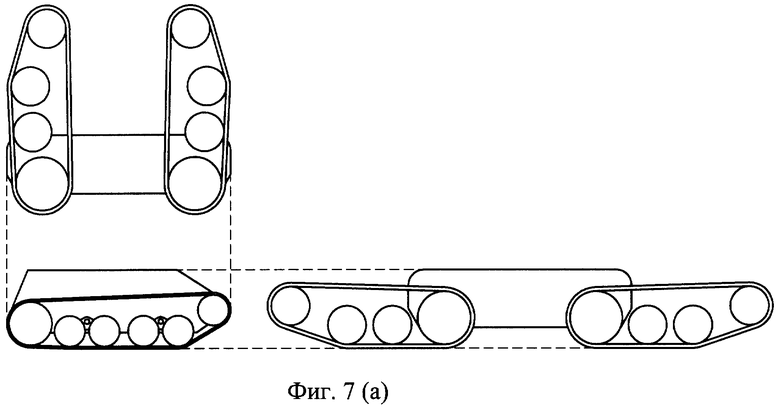
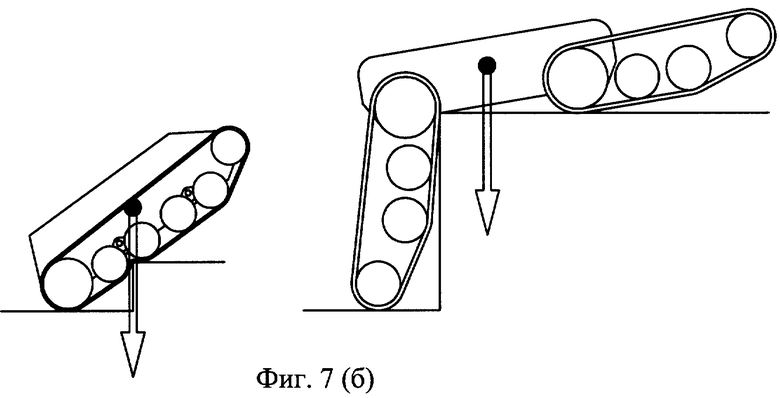
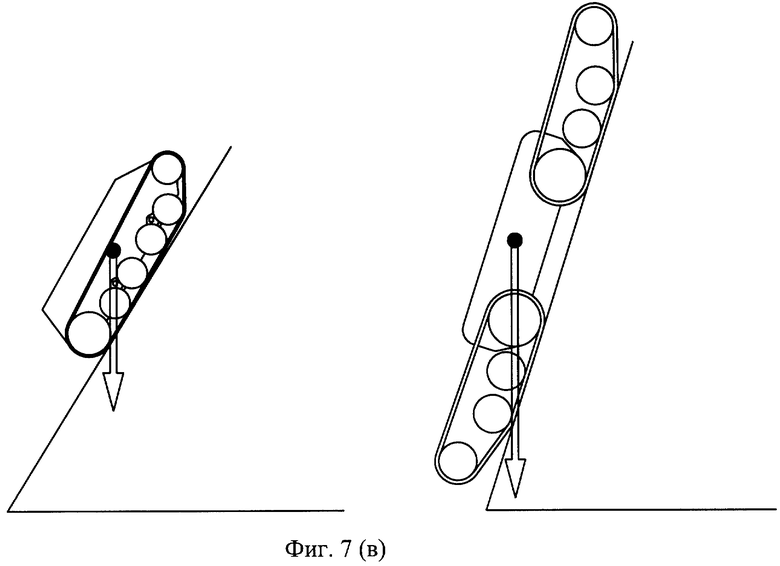
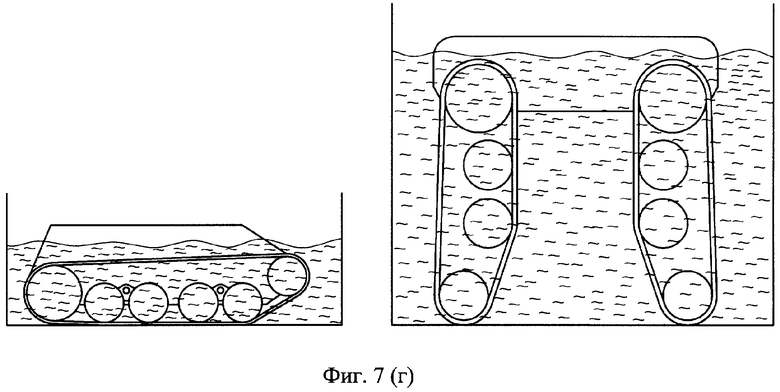
Известна ходовая часть мобильного робота с дистанционным управлением (патент Японии №63-270), представленная на Фиг.6. Транспортное средство указанного робота состоит из корпуса 1 и четырех гусеничных тележек 2, шарнирно соединенных с корпусом. Причем поворот гусеничных тележек относительно корпуса происходит вокруг осей 3, совмещенных с осями вращения мотор-звездочек, приводящих в движение гусеничный обвод 4. Подобная схема построения транспортного средства позволяет резко повысить проходимость по сравнению с традиционной двухгусеничной схемой. На Фиг.7 представлено сравнение проходимости четырехгусеничной схемы транспортного средства с традиционной двухгусеничной схемой. Стрелками на чертежах обозначено направление действия силы тяжести, а закрашенным кружком - ориентировочное расположение центра масс каждого из рассматриваемых транспортных средств. Фиг.7(а) иллюстрирует равенство длины и высоты транспортных средств в зависимости от положения, занимаемого гусеничными тележками в четырехгусеничной схеме. На Фиг.7(б) показано наибольшее пороговое препятствие, которое может преодолеть каждое из рассматриваемых транспортных средств. Увеличение высоты порогового препятствия приведет к опрокидыванию традиционного транспортного средства и зацеплению днищем корпуса четырехгусеничного транспортного средства, в любом случае преодоление препятствия будет не возможным. Фиг.7(в) иллюстрирует предельные углы дифферента, для рассматриваемых схем, при превышении которых произойдет потеря устойчивости. На Фиг.7(г) показана наибольшая глубина водной преграды, преодолеваемой вброд каждым из рассматриваемых транспортных средств. На Фиг.7(д) показан максимально широкий ров, который может быть преодолен каждым из рассматриваемых транспортных средств. Превосходство в профильной проходимости четырехгусеничной схемы над традиционной двухгусеничной очевидно, но, кроме преимуществ, четырехгусеничная схема содержит в себе и ряд существенных недостатков, сдерживающих ее развитие и применение:
- Маневренность четырехгусеничной схемы при движении по мягким, сыпучим и т.д. грунтам резко падает по сравнению с двухгусеничной, что вызвано отсутствием гусеничного обвода между мотор-звездочками. Так при повороте транспортного средства с опущенными на грунт гусеничными тележками соотношение длины машины к ее ширине явно не в пользу четырехгусеничной схемы. Кроме того, неизбежно происходит загребание гусеничными тележками грунта, что в свою очередь затрудняет поворот. При повороте четырехгусеничного транспортного средства с поднятыми над поверхностью грунта гусеничными тележками четырехгусеничная машина превращается в четырехколесную, со всеми вытекающими недостатками, свойственными для колесной машины по сравнению с гусеничной.
- Наличие четырех гусеничных тележек усложняет работу оператора, управляющего транспортным средством, т.к. он вынужден постоянно следить за положением гусеничных тележек и в зависимости от дорожной ситуации менять их положение таким образом, чтобы обеспечить оптимальные условия для движения транспортного средства. Кроме того, постоянное использование силовых приводов качания гусеничных тележек в процессе движения транспортного средства отрицательно сказывается на расходе электроэнергии машины, особенно в случае применения четырехгусеничной схемы ходовой части в мобильном роботе, где запас электроэнергии жестко ограничен и увеличение энергозатрат приведет к снижению времени автономного функционирования робота.
- В случае применения четырехгусеничного транспортного средства в составе мобильного робота на ходовую часть обычно устанавливают манипулятор, как показано на Фиг.6. При этом гусеничные тележки начинают мешать работе манипулятора. При опущенных на грунт гусеничных тележках полноценная работа манипулятора возможна только сбоку от мобильного робота, а при поднятых вертикально (минимальная длина транспортного средства) блокируется поворот манипулятора вокруг вертикальной оси. Все это снижает эффективность работы манипулятора и мобильного робота в целом.
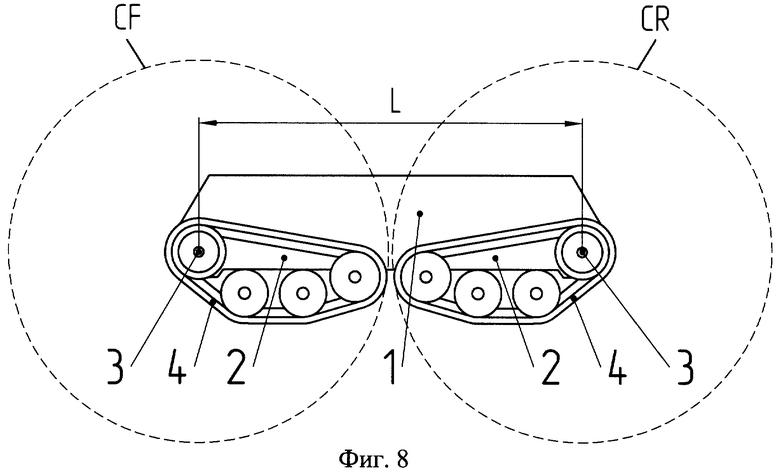
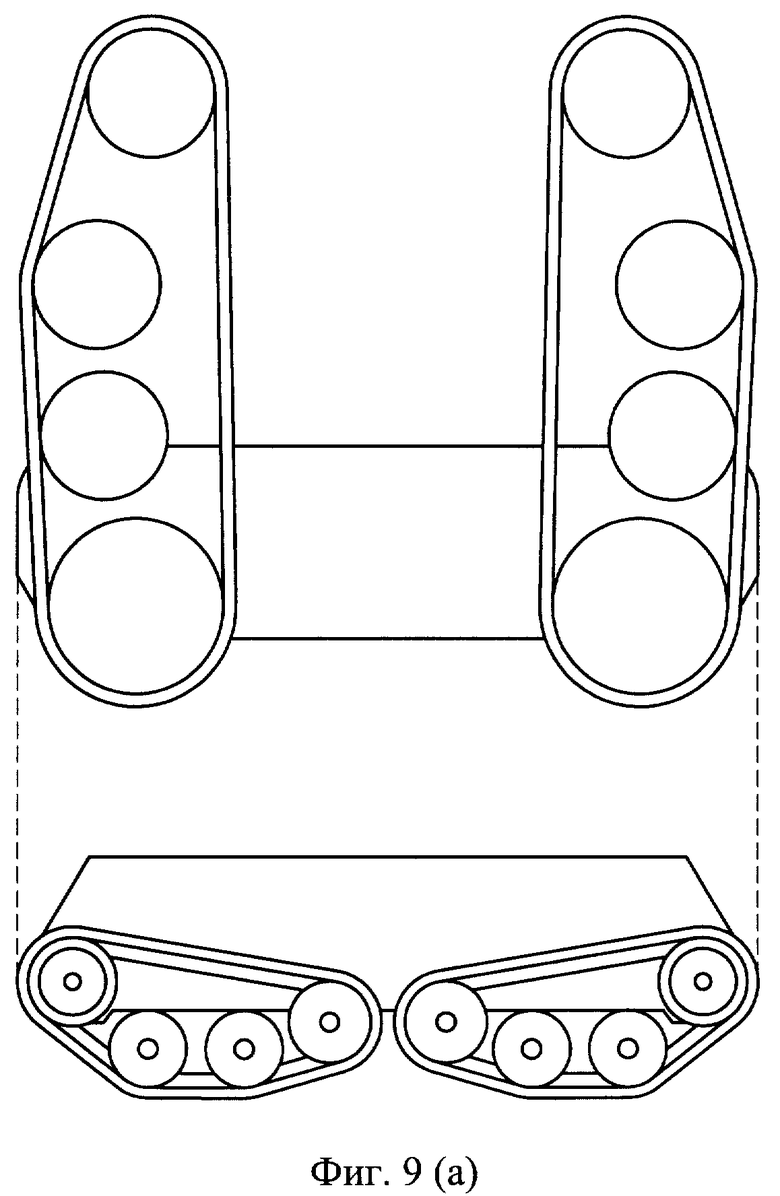
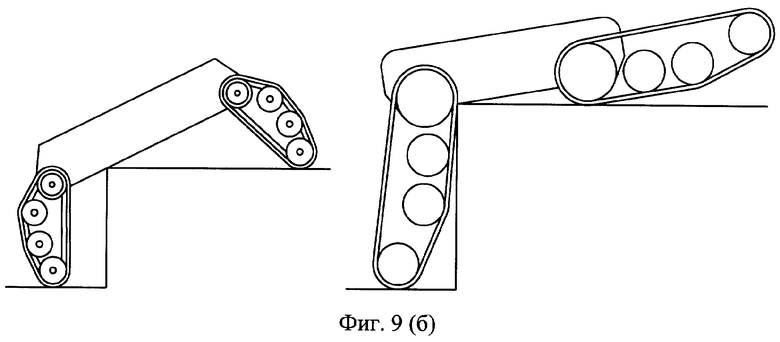
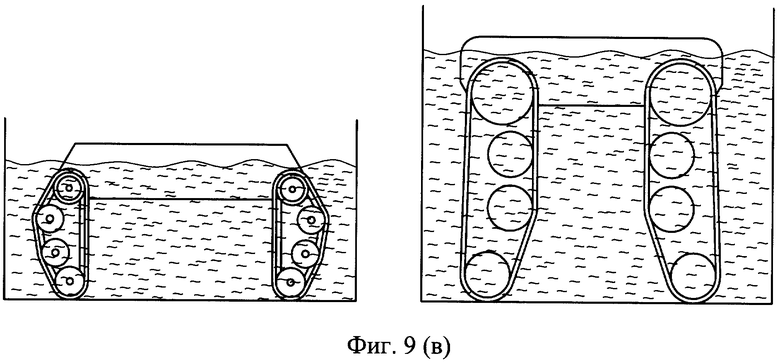
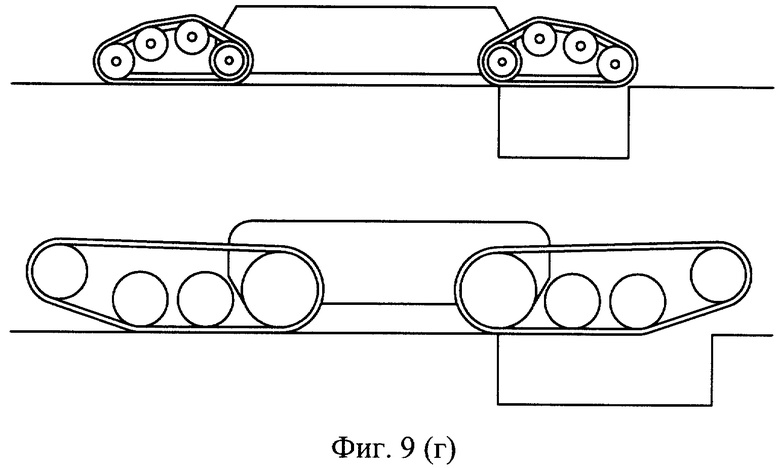
Известна также ходовая часть робота, используемого при спасательных работах (патент США №5.337.846 от 16.08.1994 г.), представленная на Фиг.8, которая принята за прототип. Ходовая часть указанного робота состоит из корпуса 1 и четырех гусеничных тележек 2, шарнирно соединенных с корпусом. Причем поворот гусеничных тележек относительно корпуса происходит вокруг осей 3, совмещенных с осями вращения мотор-звездочек, приводящих в движение гусеничный обвод 4. Особенность данной схемы ходовой части заключается в том, что расстояние L между осями вращения мотор-звездочек выбирают таким образом, что траектории CF и CR поворота передней и задней гусеничных тележек не пересекаются. Это решение позволяет избавиться от большинства вышеупомянутых недостатков четырехгусеничной схемы. Большинство типовых препятствий данное транспортное средство преодолевает при сложенных гусеничных тележках в положение, изображенное на Фиг.8. В таком положении гусеничных тележек данное транспортное средство становится аналогом двухгусеничной схемы и лишено всех вышеупомянутых недостатков. В случае возникновения необходимости преодоления препятствия, размеры которого превосходят возможности двухгусеничного транспортного средства, сохраняется способность преодоления этого же препятствия с использованием четырехгусеничной схемы. Однако для осуществления возможности складывания гусеничных тележек в положение, изображенное на Фиг.8, длина гусеничных тележек должна быть не более половины длины корпуса транспортного средства. Это требование накладывает существенные ограничения на возможности данного транспортного средства по преодолению разных препятствий. На Фиг.9 представлено сравнение проходимости двух рассматриваемых четырехгусеничных схем построения ходовой части. Фиг.9(а) иллюстрирует равенство минимальной длины транспортных средств. На Фиг.9(б) показано наибольшее пороговое препятствие, которое может преодолеть каждая из рассматриваемых схем. На Фиг.9(в) показана наибольшая глубина водной преграды, преодолеваемой вброд. На Фиг.9(г) показан максимально широкий ров, который может быть преодолен каждым транспортным средством. Сравнение представленных чертежей показывает, что борьба с вышеописанными недостатками в предложенном в прототипе способе снижает возможности профильной проходимости четырехгусеничной схемы в среднем около двух раз.
Техническим результатом предлагаемого устройства является сохранение возможностей профильной проходимости четырехгусеничной схемы и устранение свойственных ей недостатков.
Сущность предлагаемого устройства заключается в том, что транспортное средство состоит из корпуса и четырех гусеничных тележек, шарнирно соединенных с корпусом. Причем поворот гусеничных тележек относительно корпуса происходит вокруг осей, совмещенных с осями вращения мотор-звездочек, приводящих в движение гусеничный обвод. Внутри корпуса транспортного средства размещены независимые приводы вращения мотор-звездочек и рычагов.
Поставленная цель достигается тем, что, в отличие от прототипа, гусеничные тележки состоят из пары рычагов, присоединенных к корпусу транспортного средства с возможностью качания относительно корпуса вокруг осей, совмещенных с осями вращения мотор-звездочек. Между не связанными с мотор-звездочкой концами рычагов закреплена ось параллельно оси вращения мотор-звездочек, на которой, с возможностью качания, установлен шатун. В средней части рычагов шарнирно присоединена пара щек. На ближайшей к корпусу боковой поверхности одной из щек с возможностью вращения закреплен ролик. На конце рычагов, шатуна и щек с возможностью вращения закреплены колеса, а на боковых поверхностях корпуса транспортного средства расположены направляющие ролика. В средней части шатуна с возможностью вращения закреплены концы тяг, противоположные концы которых закреплены на щеках с возможностью свободного перемещения в пределах паза щек. Оси качания шатуна, щек, вращения ролика, колес и тяг параллельны осям вращения мотор-звездочек. Такая совокупность признаков предлагаемого транспортного средства обеспечивает возможность складывания гусеничных тележек для устранения недостатков, свойственных четырехгусеничной схеме при сохранении размеров разложенных гусеничных тележек, что позволяет сохранить возможности профильной проходимости четырехгусеничной схемы.
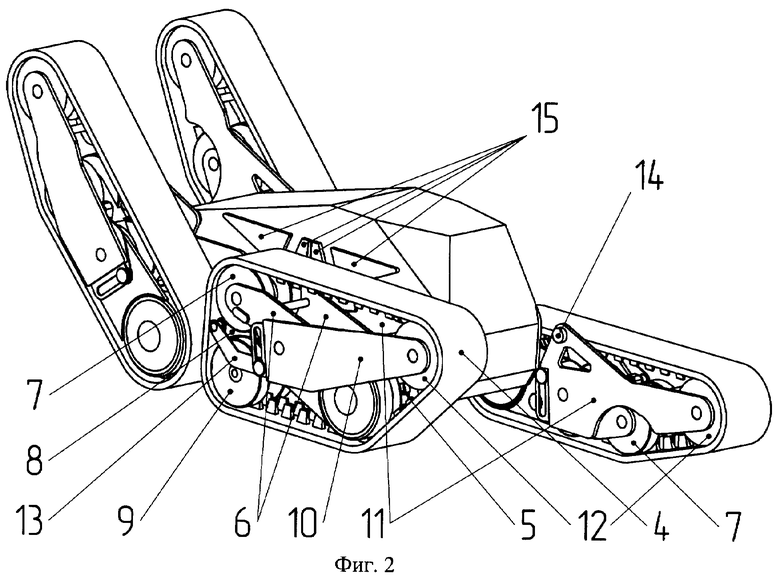
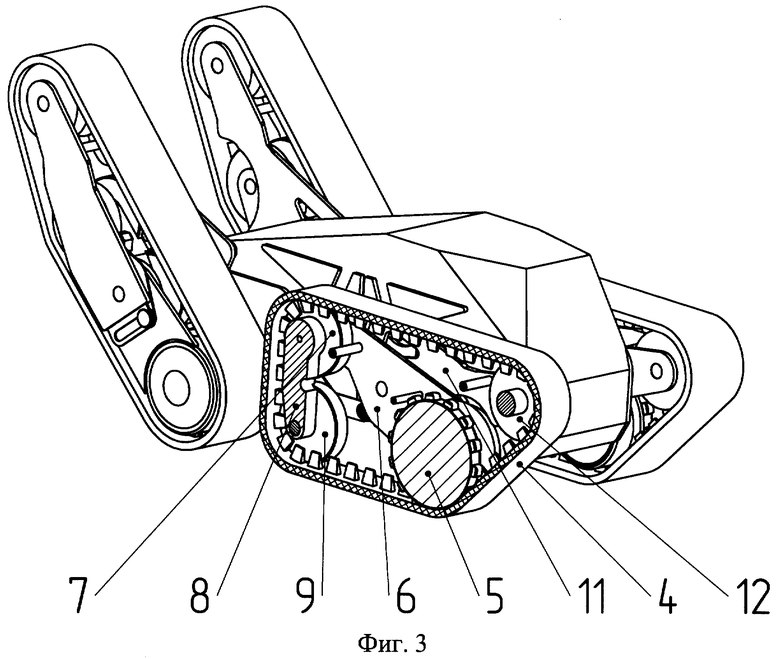
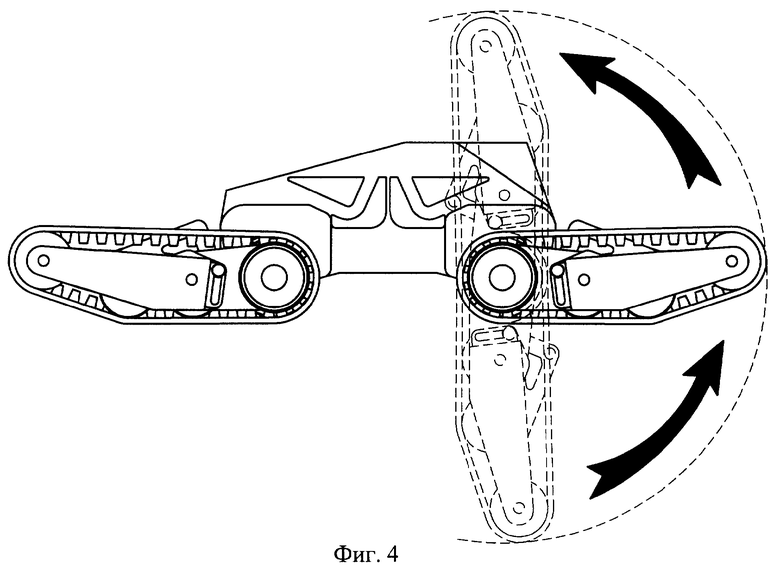
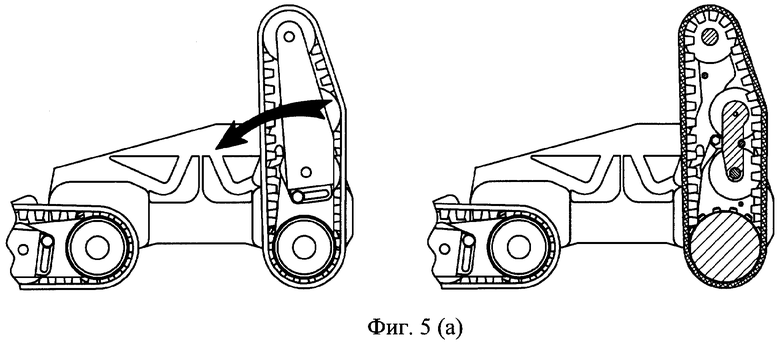
Сущность изобретения поясняется чертежами, где на Фиг.1 изображен общий вид предлагаемого транспортного средства. На Фиг.2 представлены основные детали, составляющие гусеничную тележку предлагаемого транспортного средства. Фиг.3 содержит разрез гусеничной тележки. Фиг.4 и Фиг.5 иллюстрируют механизм складывания гусеничных тележек. Фиг.6 - ходовая часть аналога по патенту Японии. Фиг.7 - сравнение проходимости четырехгусеничной схемы транспортного средства с традиционной двухгусеничной схемой. Фиг.8 - ходовая часть прототипа по патенту США. На Фиг.9 представлено сравнение проходимости двух рассматриваемых четырехгусеничных схем построения ходовой части.
Предлагаемое транспортное средство состоит из корпуса 1 и четырех гусеничных тележек 2, соединенных с корпусом 1 с возможностью поворота вокруг осей 3, совмещенных с осями вращения мотор-звездочек 5, находящихся в зацеплении с гусеничным обводом 4. К корпусу транспортного средства 1 соосно с мотор-звездочками 5 присоединены рычаги 6 с возможностью поворота относительно корпуса 1. Внутри корпуса транспортного средства 1 размещены независимые приводы вращения мотор-звездочек 5 и рычагов 6. Между концами рычагов 6 с возможностью вращения закреплены колеса 7 и соосно с ними шатун 8. С обеих сторон к шатуну 8 с возможностью вращения присоединены колеса 9. В средней части к рычагам 6 шарнирно присоединены щеки 10 и 11. Между концами щек 10 и 11 закреплены с возможностью вращения колеса 12. Щеки 10 и 11 соединены с шатуном 8 при помощи тяг 13, причем один конец тяг 13 шарнирно соединен с шатуном 8, а другой имеет возможность свободного перемещения в пределах паза щек 10, 11. К щеке 11 прикреплен ролик 14, а на боковых поверхностях корпуса 1 расположены направляющие 15.
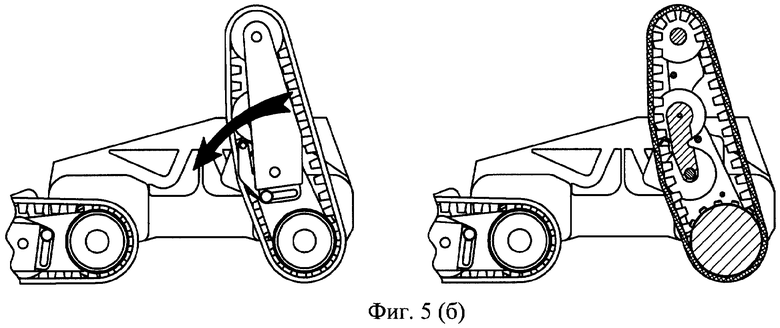
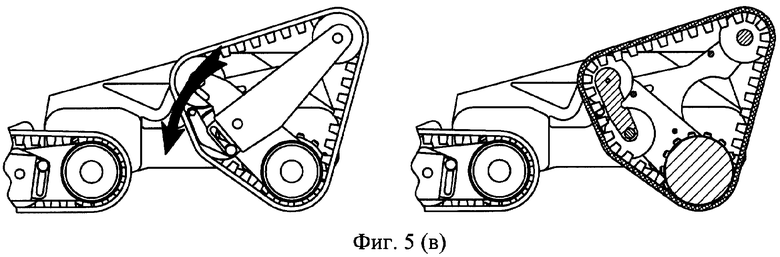
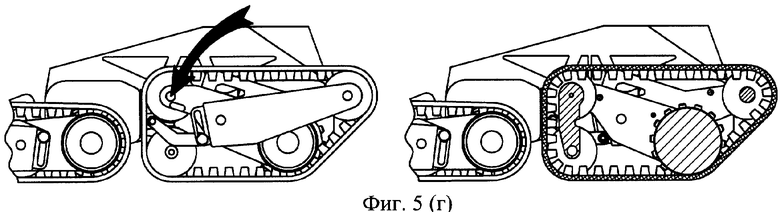
Предлагаемое устройство транспортного средства работает следующим образом. Приводы мотор-звездочек любой известной конструкции, расположенные внутри корпуса 1 предлагаемого транспортного средства, вращают мотор-звездочки 5. Мотор-звездочки 5 приводят в движение гусеничный обвод 4. Угловая скорость вращения мотор-звездочек одного борта синхронизируется. Таким образом, происходит перемещение транспортного средства по опорной поверхности. Поворот гусеничных тележек 2 относительно корпуса 1 происходит при помощи приводов любой известной конструкции, вращающих рычаги 6 и расположенных внутри корпуса 1 предлагаемого транспортного средства. При подъеме гусеничных тележек 2 вверх, до вертикального положения относительно корпуса 1, щеки 10 и 11 фиксируются относительно рычагов 6, любым известным способом, в том положении, когда щеки 10, 11 являются продолжением рычагов 6. Тяги 13 фиксируют положение шатуна 8 относительно рычагов 6 (Фиг.4). При повороте гусеничной тележки от вертикального положения в сторону другой гусеничной тележки, ролик 14 входит в направляющие 15, фиксация щек 10, 11 относительно рычагов 6 снимается. Если продолжить поворот рычагов 6, то ролик 14, двигаясь в направляющих 15, заставляет щеки 10 и 11 совершать переносное движение, перемещаясь вместе с рычагами 6 и поворачиваясь вокруг шарнира, соединяющего рычаги 6 со щеками 10, 11 (Фиг.5(а) и 5(б)). В начале поворота щек 10, 11 относительно рычагов 6 тяги 13 свободно скользят в пределах пазов щек 10, 11, а потом, достигнув конца паза, начинают поворачивать шатун 8 относительно рычагов 6 (Фиг.5(в)). Поворот рычагов 6 относительно корпуса 1 прекращается в тот момент, когда отрезок гусеничного обвода 4, расположенный между мотор-звездочкой 5 и колесом 9, встанет параллельно дну корпуса 1 (Фиг.5(г)). Транспортное средство со сложенными, описанным выше способом, гусеничными тележками способно, двигаясь по опорной поверхности, преодолевать большинство типовых препятствий без изменения формы гусеничного обвода, что упрощает работу оператора и приводит к значительной экономии электроэнергии, следовательно, и времени автономного функционирования. При этом маневренность транспортного средства при движении по мягким, сыпучим и т.д. грунтам, из-за наличия гусеничного обвода между мотор-звездочками, не уступает ходовой части по прототипу. Но, в отличие от прототипа, при движении по прямой, в случае необходимости, не сложенные гусеничные тележки можно опустить на грунт для увеличения устойчивости при движении по наклонной поверхности или уменьшения удельного давления на грунт.
В случае применения предлагаемого четырехгусеничного транспортного средства в составе мобильного робота с манипулятором, при складывании передних гусеничных тележек они перестают мешать полноценной работе манипулятора аналогично ходовой части по прототипу.
При возникновении необходимости преодоления препятствия, размеры которого превосходят возможности предлагаемого транспортного средства со сложенными гусеничными тележками, приводы рычагов 6, по команде оператора, начинают поворачивать рычаги 6 в противоположную складыванию сторону. При этом детали, составляющие гусеничную тележку, начинают двигаться в обратной складыванию последовательности.
Размеры деталей выбраны такими, чтобы длина гусеничного обвода при сложенной и разложенной гусеничной тележке была одинаковой, а в процессе трансформирования менялась в пределах, не влияющих на работоспособность транспортного средства.
При использовании предлагаемого устройства транспортного средства недостатки, свойственные четырехгусеничной схеме, полностью устраняются, а возможности профильной проходимости, в отличие от прототипа, сохраняются в полном объеме.
Предлагаемое устройство транспортного средства не требует применения специальных материалов, может быть изготовлено с помощью известных технических средств и обеспечивает технический результат. Следовательно, оно обладает промышленной применимостью.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2002 |
|
RU2230683C2 |
| МНОГОФУНКЦИОНАЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2641951C1 |
| Шасси четырехгусеничного транспортного средства | 2022 |
|
RU2785930C1 |
| Мобильный робототехнический комплекс | 2015 |
|
RU2612115C1 |
| Гусеничный мотоцикл | 2023 |
|
RU2821602C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Способ повышения проходимости гусеничного транспортного средства и гусеничное транспортное средство для его осуществления | 1988 |
|
SU1523454A1 |
| ХОДОВАЯ ЧАСТЬ ГУСЕНИЧНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2354579C2 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| Модуль колёсно-гусеничного движителя и шасси с двумя модулями | 2022 |
|
RU2784225C1 |

Изобретение относится к машиностроению. Гусеничное транспортное средство состоит из корпуса с размещенными внутри независимыми приводами вращения мотор-звездочек и рычагов и гусеничных тележек, соединенных с корпусом с возможностью поворота относительно корпуса вокруг осей, совмещенных с осями вращения мотор-звездочек, находящихся в зацеплении с гусеничным обводом. Гусеничные тележки состоят из рычагов, присоединенных к корпусу транспортного средства с возможностью качания относительно корпуса вокруг осей, совмещенных с осями вращения мотор-звездочек. Между не связанными с мотор-звездочкой концами рычагов закреплена ось параллельно оси вращения мотор-звездочек, на которой, с возможностью качания, установлен шатун. В средней части рычагов шарнирно присоединены щеки. На ближайшей к корпусу боковой поверхности одной из щек с возможностью вращения закреплен ролик. На конце рычагов, шатуна и щек с возможностью вращения закреплены колеса. На боковых поверхностях корпуса транспортного средства расположены направляющие ролика. В средней части шатуна с возможностью вращения закреплены концы тяг, противоположные концы которых закреплены на щеках с возможностью свободного перемещения в пределах паза щек. Оси качания шатуна, щек, вращения ролика, колес и тяг параллельны осям вращения мотор-звездочек. Достигается устранение недостатков четырехгусеничных транспортных средств при сохранении профильной проходимости. 9 ил.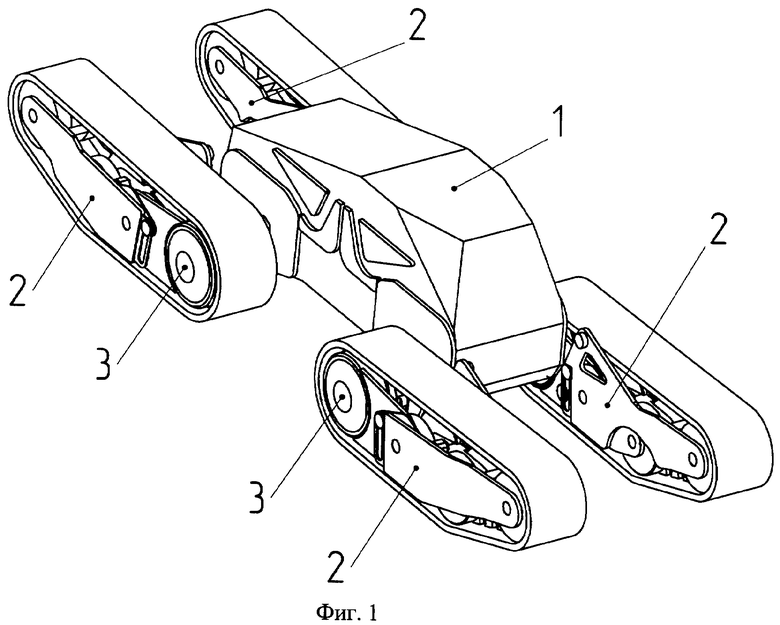
Гусеничное транспортное средство, состоящее из корпуса с размещенными внутри независимыми приводами вращения мотор-звездочек и рычагов, и гусеничных тележек, соединенных с корпусом, с возможностью поворота относительно корпуса вокруг осей, совмещенных с осями вращения мотор-звездочек, находящихся в зацеплении с гусеничным обводом, отличающееся тем, что гусеничные тележки состоят из рычагов, присоединенных к корпусу транспортного средства с возможностью качания относительно корпуса вокруг осей, совмещенных с осями вращения мотор-звездочек, между не связанными с мотор-звездочкой концами рычагов закреплена ось параллельно оси вращения мотор-звездочек, на которой с возможностью качания установлен шатун, в средней части рычагов шарнирно присоединены щеки, на ближайшей к корпусу боковой поверхности одной из щек с возможностью вращения закреплен ролик, на конце рычагов, шатуна и щек с возможностью вращения закреплены колеса, а на боковых поверхностях корпуса транспортного средства расположены направляющие ролика, в средней части шатуна с возможностью вращения закреплены концы тяг, противоположные концы которых закреплены на щеках с возможностью свободного перемещения в пределах паза щек, оси качания шатуна, щек, вращения ролика, колес и тяг параллельны осям вращения мотор-звездочек.
| US 5337846 A, 16.08.1994 | |||
| US 3417832 A, 24.12.1964 | |||
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2002 |
|
RU2230683C2 |
| Транспортное средство с наклоняемым гусеничным приводом | 1990 |
|
SU1819231A3 |

